以下、本発明の実施形態について、添付図面を参照して説明する。以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を限定するものではない。また、以下に説明される構成の全てが、本発明の必須要件であるとは限らない。
図1は、本実施形態における多点測定装置100の主な構成と、多点測定装置100が計測対象とする被測定体の一例として、ゴルフのプレイヤーPを示したものである。同図において、ゴルフは周知のように、ゴルフ場GでプレイヤーPがゴルフクラブ1をスイング動作して静止したボール2(図9を参照)を打ち、ホール(図示せず)と呼ばれる穴にいかに少ない打数で入れられるかを競うスポーツの一種である。ここでは、プレイヤーPがゴルフクラブ1にスイング力を伝達する例えば左手首P1に、端末(ウェアブルウォッチ)となる腕時計型端末3が装着され、別な端末として、プレイヤーPの下半身用服装の収容部であるポケット、好ましくは後ポケットに携帯端末4が収容される。また、プレイヤーPの背中P2で左右の肩甲骨の中間位置には、例えばたすき掛けされた紐状のストラップ5を使用して、外形箱状の6軸センサーユニット6が装着される。
腕時計型端末3はプレイヤーPの腕、好ましくは手首に装着されればよく、本実施形態では図1に示すように、腕時計型端末3を右打ちのプレイヤーPの左手首P1に装着しているものとする。なお、腕時計型端末3は、左打ちのプレイヤーPが使用することもでき、腕時計型端末3は、右手首に装着してもよい。
プレイヤーPが保有する携帯端末4は、一般的なスマートフォンの機能を有し、扁平状をなす本体7の正面には、画面表示のための表示部8や、手動操作のための操作部9が設けられる。本実施形態では、携帯端末4を下半身用衣服の右後ポケット11に収容しているが、携帯端末4はプレイヤーPの腰P3の加速度等を計測するために腰P3に近接していればよく、左後ポケット12に収容してもよい。
図2は、腕時計型端末3の外観を示しており、図3は、多点測定装置100を構成する腕時計型端末3の主な構成要素を示している。これらの各図において、腕時計型端末3は、制御手段15と、第一慣性計測部16と、GPS(Global Positioning System:地球測位システム)受信部17と、気圧計測部18と、気温計測部19と、高度計測部20と、集音部21と、送受信部22と、記憶部23と、表示部24と、操作部25と、報知部26と、振動子27と、を備えている。
制御手段15は、CPU(中央演算装置)を含んで構成され、記憶部23に記憶されたプログラム28に基づいて腕時計型端末3の全体を制御する。このCPUがプログラム28にしたがって演算処理を実行することにより、腕時計型端末3の各機能が実現される。プログラム28には、プレイヤーPがゴルフクラブ1をスイング動作して打ち当てたボール2の飛距離を補正するための飛距離補正プログラムや、プレイヤーPがゴルフクラブ1をスイング動作したときの左手首P1の加速度や角速度の波形データを、多点測定装置100の測定手段となる携帯端末4に送り出すためのプレイデータ送出プログラムなどが含まれる。
第一慣性計測部16は、被測定体となるプレイヤーPの動きを検知するための検知手段として、何れも慣性センサーとなる加速度センサー30及びジャイロセンサー31が組み込まれている。加速度センサー30は、プレイヤーPの左手首P1における直交三軸方向の加速度を計測することができ、ジャイロセンサー31は、プレイヤーPの左手首P1における直交三軸の各軸回りの角速度を計測することができる。第一慣性計測部16は、腕時計型端末3を装着したプレイヤーPの一連のスイング動作時における左手首P1の加速度や角速度を計測する。第一慣性計測部16により計測された加速度情報や角速度情報は、プレイヤーPのスイング動作時における左手首P1の加速度波形や角速度波形として、制御手段15に送出される。
GPS受信部17は、腕時計型端末3の現在位置を取得する位置計測部を構成し、複数の人工衛星32からの電波を無線で受信することで、腕時計型端末3ひいてはその腕時計型端末3を装着するプレイヤーPの三次元位置(経度、緯度及び高度)を計測し、その位置情報を制御手段15に送出するものである。なお、腕時計型端末3の現在位置を検出できるものであれば、GPS受信部17以外の位置検出装置を利用してもよい。また、人工衛星32には原子時計が搭載されている。この人工衛星32からは特定の周波数にて極めて正確な時刻信号波が発信されており、これをGPS受信部17により受信することで、腕時計型端末3の時間軸が規定される。GPS受信部17及び人工衛星32が位置計測部として機能する。
気圧計測部18は、圧力センサー33が組み込まれており、この圧力センサー33を使用して気圧を計測する、計測された気圧情報は、制御手段15に送出される。
気温計測部19は、サーミスタ(図示せず)を利用した温度センサー34が組み込まれており、この温度センサー34により気温を計測する。計測された気温情報は、制御手段15に送出される。
高度計測部20は、気圧計測部18に組み込まれた圧力センサー33を使用して、この圧力センサー33で計測した気圧の変化量を基に現在位置の海抜高度(標高)(以下、「高度」という。)を計算し、現在位置の高度情報として制御手段15に送出する。高度計測部20は、気圧変化を変換して相対的な高度を算出するものであり、気圧が気象条件により変化すると、計測値の高度も変化する。そのため、正確な高度がわかる場所で高度計測部20の高度を合わせることで、より正確な高度を計測することができる。例えば、ラウンド前にゴルフ場G内の正確な高度がわかる場所で高度を合わせることで、その後のプレイ中により正確な高度を計測することができる。なお、プレイヤーPの現在位置における高度は、GPS受信部17が受信したプレイヤーPの三次元位置(経度、緯度及び高度)の高度を用いてもよい。
集音部21は、外部の音を集め音声情報として制御手段15に送出するものであり、例えばマイクである。本実施形態の集音部21は、プレイヤーPの音声を集音することを想定しており、人間の音声が集音可能であればよい。集音部21は、後述するショット地点の状態を音声により入力する際に状態入力部として機能する。また集音部21は、第一慣性計測部16による加速度の計測開始と計測終了を音声により指示する際に、第一指示入力部として機能する。
送受信部22は、無線の通信手段を介して他の機器、例えば、携帯端末4との双方向通信を可能にするものである。そのため、腕時計型端末3は携帯端末4等と各種情報を送受信することができる。
記憶部23は、磁気ハードディスク装置や半導体記憶装置などの各種記憶装置を用いて構成され、第一慣性計測部16により計測された加速度情報及び角速度情報を含んだプレイデータ、GPS受信部17が受信した腕時計型端末3の位置情報、気圧計測部18により計測された気圧情報、気温計測部19により計測された気温情報、高度計測部20により計測された高度情報、集音部21から入力された音声情報等の各種情報を書き込み及び読み出し可能となっている。また、記憶部23には予めゴルフ場Gのコースの地図情報35が記憶されている。地図情報35は、位置座標情報を含む2次元地図又は3次元地図であり、変更・追加・削除等の更新が可能である。
表示部24は、制御手段15からの表示制御信号を受け、腕時計型端末3の現在位置等の様々な表示を行なうものである。図2に示すように、表示部24は腕時計型端末3の本体正面に露出して設けられる液晶モジュールや液晶パネルにより構成され、これらの液晶モジュールや液晶パネルは周知のように、多数のサブ画素を格子状に配列したドットマトリクスによる表示を行なうものである。表示部24は、後述するアドバイス情報を文字や地図等により表示して提示する際に情報提示部として機能する。
操作部25は、プレイヤーPによる操作を受けて、電気的な操作信号を制御手段15に送出するものである。図2に示すように、操作部25は、第1ボタン25A、第2ボタン25B、第3ボタン25C及び第4ボタン25Dを備えると共に、表示部24がタッチパネル25Eとなっており、表示部24の表面部も操作部25として機能する。なお、操作部25としてのボタンの数は、4つに限るものではなく増減可能である。操作部25は、後述するショット地点の状態を入力する際に状態入力部として機能する。また操作部25は、第一慣性計測部16による加速度の計測開始と計測終了を音声により指示する際に、第二指示入力部として機能する。集音部21による第一指示入力部と、操作部25による第二指示入力部は、少なくともどちらか一方を備えていればよい。
報知部26は、記憶部23に記憶された情報等を音声によりプレイヤーPに報知するものであり、例えばスピーカーである。報知部26は、後述するアドバイス情報を音声により提示する際に情報提示部として機能する。また報知部26は、後述するベスト飛距離時のスイング情報を音声や振動で提示する際に、出力部として機能する。この場合の出力部は、例えば音声を出力するスピーカー及び/又は振動を発生するバイブレーターで構成される。
振動子27は、決められた周期で生成されたクロック信号を、制御手段15に送出するもので、例えばシリコン振動子や、セラミック振動子や、水晶振動子などにより構成される。また、マイコンとなる制御手段15と同じシリコンチップ上に、発振回路となるシリコン振動子を形成することで、極めて小型且つ低コストに振動子27を内蔵することができる。
制御手段15は、プレイヤーPがゴルフクラブ1をスイング動作したときに、そのゴルフクラブ1のヘッドに打ち当てたボール2の実際の飛距離を算出する飛距離算出部37を備えている。図4を参照して、飛距離の具体的な算出方法を説明すると、腕時計型端末3が備える第一慣性計測部16は、集音部21や操作部25からの計測開始の指示を受けて、腕時計型端末3を装着した部位の加速度と角速度の計測を開始し、集音部21や操作部25からの計測終了の指示を受けて、当該加速度と角速度の計測を終了し、この間に腕時計型端末3を装着したプレイヤーPがスイングをした場合に相当する加速度や角速度の変化を計測すると、飛距離算出部37は第一慣性計測部16からの計測結果を受けて、プレイヤーPがクラブ1をスイングしたと判断し、プレイヤーPのスイングした位置Aの位置情報をGPS受信部17により取得する。飛距離算出部37は、取得した位置Aでの最後のスイングをプレイヤーPがボール2を打った第1打と決定し、その位置情報を記憶部23に記憶する。また飛距離算出部37は、第一慣性計測部16による計測開始から計測終了までの計測結果を、位置Aの位置情報と関連付けて、位置Aでの一連のスイング動作時の加速度と角速度の波形として、同じく制御手段15に組込まれた後述するスイング計測制御部38に転送する。
次に、プレイヤーPが打ったボール2の到達地点まで移動し、その位置Bで飛距離算出部37は位置Aと同様に、第一慣性計測部16による加速度と角速度の計測開始から計測終了までの間に、プレイヤーPがクラブ1をスイングしたと判断した場合に、位置Bの位置情報をGPS受信部17により取得する。飛距離算出部37は、取得した位置Bでの最後のスイングをプレイヤーPがボール2を打った第2打と決定し、その位置情報を記憶部23に記憶する。また飛距離算出部37は、第一慣性計測部16による計測開始から計測終了までの計測結果を、位置Bの位置情報と関連付けて、位置Bでの一連のスイング動作時の加速度と角速度の波形としてスイング計測制御部38に転送する。
そして飛距離算出部37は、第1打を打った位置情報と第2打を打った位置情報を記憶部23から読み出し、位置Aと位置Bとの直線距離を算出する。算出された直線距離は、位置Aからの第1打の飛距離として、前述した位置Aでのスイング動作時の加速度と角速度の各波形と関連付けて記憶部23に記憶される。以降同様に、第3打、第4打・・・での位置情報を取得し、それぞれ、位置Bからの第2打、位置Cからの第3打・・・の飛距離を算出し、位置B、位置C・・・でのスイング動作時の加速度と角速度の波形と関連付けて記憶部23に記憶する。なお、本実施形態では、位置Aでの最後のスイングをプレイヤーPがボール2を打った第1打と決定しているが、プレイヤーPがショットすることを声で宣言し、その後ショットすることで、その音声を集音部21により集音し、集音した時の位置Aの位置情報をGPS受信部17により取得してもよいし、プレイヤーPが操作部25を操作し、位置Aの位置情報をGPS受信部17により取得してもよい。
また、飛距離算出部37は、プレイヤーPの打ったボール2がフェアウェイの中心位置Cから左右方向にずれているか否かを算出する。上記の第1打についての具体的な算出方法を説明すると、図4に示すように、位置Aと位置Bを結んだ直線に対して直角な直線とフェアウェイの両端との交点である左端位置L及び右端位置Rの位置情報を地図情報35から読み出す。そして、左端位置Lと右端位置Rを結んだ直線の中間点をフェアウェイの中心位置Cと決定する。その中心位置Cから位置Bが左方向に所定距離(例えば、2m)以上離れた場合には第1打を左方向にずれたと判定し、中心位置Cから位置Bが右方向に所定距離(左方向と同様に、例えば、2m)以上離れた場合には第1打を右方向にずれたと判定する。位置Bが中心位置Cから所定距離未満の場合には、第1打をずれ無しと判定する。左右方向のずれの判定は、その後の第2打、第3打・・・についても行なう。なお、左右方向のずれを判定する所定距離は任意に設定可能である。また、左右方向のずれの判定結果は、クラブ1の番手情報と紐付けされて記憶部23に記憶される。複数の判定結果が蓄積されると、飛距離算出部37は左方向にずれた割合、右方向にずれた割合、ずれ無しの割合を算出し、記憶部23に記憶する。
上記の例では、プレイヤーPが打ったボール2について、コースのフェアウェイの中心位置Cから位置Bのずれを、飛距離算出部37が算出している。しかし、プレイヤーPはコースによって、左サイドや右サイドへ意図的にボール2を打っている場合がかなりあるので、別な例として、左端位置Lと右端位置Rを結んだ直線の任意の地点を基準位置と決定し、その基準位置から位置Bのずれを、飛距離算出部37で算出する構成としてもよい。基準位置は、例えばプレイヤーPが操作部25を操作し、ボール2をどの方向に打とうと意図していたのかを指示することで決定する。この場合、例えばボール2をフェアウェイの中央の方向に打とうと意図していたら、その旨を操作部25への操作で指示すれば、上述した中心位置Cが基準位置として決定される。
図3に示すように、制御手段15は、プレイヤーPの打ったボール2の実際の飛距離から、高度、気温、気圧、及びショット地点の状態を考慮した補正飛距離を算出する補正飛距離算出部39を備えている。ここで、高度による影響を考慮した補正飛距離算出部39の算出方法を、上記の第1打の飛距離の補正飛距離について説明する。高度計測部20は、位置Aにおける高度を計測し、計測した高度情報を制御手段15の補正飛距離算出部39に送出する。補正飛距離算出部39は、位置Aの高度と基準高度である海抜0mとの高低差を算出し、その高度差に基づき実際の飛距離から所定の計算式により海抜0mにおいてショットしたと仮定した場合の補正飛距離を算出する。なお、本実施形態では、基準高度を海抜0mと設定して補正飛距離を算出しているが、この基準高度は任意に設定可能である。
また、高度計測部20は、位置Bにおいても高度を計測し、計測した高度情報を制御手段15の補正飛距離算出部39に送出する。補正飛距離算出部39は、位置Aの高度と位置Bの高度とを比較し、高度に差がある場合には、その高低差Hを算出する。そして、図5(A)に示すように位置Aが位置Bよりも低い場合には、ショットが打ち上げであると判定し、図5(B)に示すように位置Aが位置Bよりも高い場合には、ショットが打ち下ろしであると判定し、図5(C)に示すように位置Aと位置Bに高度差が無い場合には、水平であると判定する。そして、打ち上げ又は打ち下ろしの場合には、その高低差Hに基づき実際の飛距離から所定の計算式により、位置Aと位置Bに高低差Hが無いと仮定した補正飛距離を算出する。水平であると判定した場合には、実際の飛距離を補正飛距離とする。
次に、気温による影響を考慮した補正飛距離算出部39の算出方法を、上記の第1打の飛距離の補正飛距離について説明する。気温計測部19は、位置Aにおける気温を計測し、計測した気温情報を制御手段15の補正飛距離算出部39に送出する。補正飛距離算出部39は、位置Aの気温と基準気温である摂氏20度との温度差を算出し、その温度差に基づき実際の飛距離から所定の計算式により摂氏20度においてショットしたと仮定した場合の補正飛距離を算出する。なお、本実施形態では、基準気温を摂氏20度と設定して補正飛距離を算出しているが、この基準気温は任意に設定可能である。
次に、気圧による影響を考慮した補正飛距離算出部39の算出方法を、上記の第1打の飛距離の補正飛距離について説明する。気圧計測部18は、位置Aにおける気圧を計測し、計測した気圧情報を制御手段15の補正飛距離算出部39に送出する。補正飛距離算出部39は、位置Aの気圧と基準気圧である1013ヘクトパスカルとの気圧差を算出し、その気圧差に基づき実際の飛距離から所定の計算式により1013ヘクトパスカルにおいてショットしたと仮定した場合の補正飛距離を算出する。なお、本実施形態では、基準気圧を1013ヘクトパスカルと設定して補正飛距離を算出しているが、この基準気圧は任意に設定可能である。
次に、ショット地点の状況による影響を考慮した補正飛距離算出部39の算出方法を、上記の第1打の飛距離の補正飛距離について説明する。本実施形態においてショット地点の状況とは、ゴルフ場GでプレイヤーPが打つボール2が置かれた地面の状態と、ショット時の風の強さと方向である。地面の状態は、ティーグランドG1、フェアウェイG2、ラフG3、バンカーG4、池G5、上り傾斜及び下り傾斜であり、ショット時の風の強さは、「強い」及び「弱い」であり、風の方向は、「アゲインスト」、「フォロー」及び「横風」である。なお、ボール2の飛距離に影響を与えるその他の環境の状態を考慮した補正飛距離を算出してもよい。
図3に示すように、制御手段15は、集音部21から送出された音声情報を判定する用語判定部40を備えている。また、制御手段15は、予め登録された用語を記憶させておく用語辞書部41を備えている。予め登録される用語は、例えば、「ティーグランド」、「フェアウェイ」、「ラフ」、「バンカー」、「池」、「上り傾斜」、「下り傾斜」、「アゲインスト」、「フォロー」、「横風」等のショット地点の状態を表すものである。用語判定部40は、集音部21からの音声情報を受信すると、その音声情報に係る用語が用語辞書部41に記憶された用語であるか否かを判定する。用語辞書部41に記憶された用語である場合には、用語判定部40は補正飛距離算出部39にその用語に対応した用語信号を送出する。補正飛距離算出部39は、用語信号を受信すると、その用語に対応した所定の計算式により、実際の飛距離からショット地点がフェアウェイG2であって、傾斜がなく、無風状態と仮定した場合の補正飛距離を算出する。なお、本実施形態では、ショット地点の基準状態をフェアウェイG2であって、傾斜がなく、無風状態と設定して補正飛距離を算出しているが、この基準状態は任意に設定可能である。
こうして補正飛距離算出部39により、基準高度や、基準温度や、基準気圧や、ショット地点の基準状態でのボール2の飛距離となる補正飛距離を求めることで、後述するアドバイス算出部42が、現在プレイ中のコースでの高度や、気温や、気圧や、ショット地点の状態を考慮した予測されるボール2の飛距離を算出し、その飛距離に適した推奨クラブの番手を、例えば表示部24や報知部26により提示する構成としてもよい。
用語辞書部41には、予めクラブ1の番手に対応する用語が記憶されており、ショットをする前に、クラブ1の番手を音声入力することで、その用語(クラブ1の番手)に対応するクラブ1の番手情報が用語判定部40から補正飛距離算出部39に送出される。そのため、飛距離算出部37は、クラブ1の番手に対応させて実際の飛距離情報を記憶部23に送出する。同様に、補正飛距離算出部39も、算出した補正飛距離をクラブ1の番手に対応させ、補正飛距離情報を記憶部23に送出する。飛距離情報及び補正飛距離情報を受信した記憶部23は、クラブ1の番手に対応させて、各打ごとに飛距離情報やスイング波形の加速度波形と関連付けて補正飛距離情報を記憶する。なお、用語辞書部41に記憶される用語は、追加・削除・変更等の更新が可能である。
本実施形態では、ショット地点の状態及びクラブ1の番手を音声により入力する方法を採用しているが、操作部25を操作してショット地点の状態及びクラブ1の番手を入力してもよい。
また、本実施形態では、高度、気温及び気圧を全て計測し、ショット地点の状態を入力しているが、例えば、気温を計測しない等、計測する項目や入力する項目は任意に決定することができ、これら以外の項目を追加してもよい。
制御手段15は、第一慣性計測部16からの加速度や角速度の波形データを、振動子27からのクロック信号で決められた時刻ごとに取り込んで、プレイヤーPのスイング時における左手首P1の動きを計測するスイング計測制御部38を備えている。スイング計測制御部38は、上述した飛距離算出部37を経由した第一慣性計測部16からの加速度と角速度の波形データを受けて、この波形データにクロック部43からの時刻情報を付加したプレイデータを記憶部23に記憶させ、全てのプレイが終了した後に、携帯端末4の操作部9からプレイデータの同期を指示する操作が行われると、記憶部23にそれまで記憶されていたプレイデータを、腕時計型端末3の送受信部22から携帯端末4に転送する機能を有する。制御手段15に備えたクロック部43は、振動子27からのクロック信号に基づき、腕時計型端末3としての時刻をカウントするもので、ここでは第一慣性計測部16からの加速度と角速度の波形データに付加する時刻情報として、例えば波形データの開始の時刻や、波形データの開始と終了の時刻や、波形データの開始や終了に関係なく、設定された一定時間ごとの時刻を付加する。或いは、第一慣性計測部16から加速度や角速度の波形データを取り込むたびに、クロック部43でカウントされた時刻を付加してもよい。ここでのクロック部43は、腕時計型端末3の第一慣性計測部16における時刻をカウントする第1クロック部として、当該第一慣性計測部16に設けられる。
またスイング計測制御部38は、携帯端末4の操作部9からクロック問合わせ信号が送出され、その信号を送受信部22で受信すると、クロック部43でカウントされる最新の時刻を送受信部22から携帯端末4に折返し送信する機能を有する。携帯端末4からのクロック問合わせ信号は、操作の手間を簡単にするために、例えば前述したプレイデータの同期を指示する操作が行われたときに送出してもよいし、別なタイミングで何らかの操作に伴い送出してもよい。
図6は、本実施形態の多点測定装置100を構成する6軸センサーユニット6の主な構成要素を示している。同図において、6軸センサーユニット6は、制御手段45と、第二慣性計測部46と、送受信部47と、記憶部48と、振動子49と、を備えている。
制御手段45は、CPU(中央演算装置)を含んで構成され、記憶部48に記憶されたプログラム52に基づいて6軸センサーユニット6の全体を制御する。このCPUがプログラム52にしたがって演算処理を実行することにより、6軸センサーユニット6の各機能が実現される。
第二慣性計測部46は、プレイヤーPの動きを検知するための検知手段として、何れも慣性センサーとなる加速度センサー53及びジャイロセンサー54が組み込まれている。加速度センサー53は、直交三軸方向の加速度を計測することができ、ジャイロセンサー54は、直交三軸の各軸回りの角速度を計測することができる。第二慣性計測部46は、6軸センサーユニット6がストラップ5により背中P2に装着された状態でプレイヤーPがスイング動作を行なうことで、プレイヤーPの背中P2の加速度や角速度を計測する。第二慣性計測部46により計測された加速度情報や角速度情報は、プレイヤーPのスイング動作時における背中P23の加速度波形や角速度波形として、制御手段45のスイング計測制御部56に送出される。
送受信部47は、有線や無線の通信手段を介して、携帯端末4と6軸センサーユニット6との双方向通信を可能にするものである。
記憶部48は、磁気ハードディスク装置や半導体記憶装置などの各種記憶装置を用いて構成され、第二慣性計測部46により計測された加速度情報及び角速度情報を含んだプレイデータ等の各種情報を書き込み及び読み出し可能となっている。
振動子49は、決められた周期で生成されたクロック信号を、制御手段45に送出するもので、例えばシリコン振動子や、セラミック振動子や、水晶振動子などにより構成される。また、マイコンとなる制御手段45と同じシリコンチップ上に、発振回路となるシリコン振動子を形成することで、極めて小型且つ低コストに振動子49を内蔵することができる。
制御手段45は、第二慣性計測部46からの加速度や角速度の波形データを、振動子49からのクロック信号で決められた時刻ごとに取り込んで、プレイヤーPのスイング時における背中P2の動きを計測するスイング計測制御部56を備えている。スイング計測制御部56は、第二慣性計測部46からの加速度と角速度の波形データを受けて、この波形データにクロック部57からの時刻情報を付加したプレイデータを記憶部48に記憶させ、全てのプレイが終了した後に、携帯端末4の操作部9からプレイデータの同期を指示する操作が行われると、記憶部23にそれまで記憶されていたプレイデータを、6軸センサーユニット6の送受信部47から携帯端末4に転送する機能を有する。制御手段45に備えたクロック部57は、振動子49からのクロック信号に基づき、6軸センサーユニット6としての時刻をカウントするもので、ここでは第二慣性計測部46からの加速度と角速度の波形データに付加する時刻情報として、例えば波形データの開始の時刻や、波形データの開始と終了の時刻や、波形データの開始や終了に関係なく、設定された一定時間ごとの時刻を付加する。或いは、第二慣性計測部46から加速度や角速度の波形データを取り込むたびに、クロック部57でカウントされた時刻を付加してもよい。ここでのクロック部57は、腕時計型端末3の第一慣性計測部16における時刻とは別に、6軸センサーユニット6の第二慣性計測部46における時刻をカウントする第1クロック部として、当該第二慣性計測部46に設けられる。
図7は、本実施形態の多点測定装置100を構成する携帯端末4の主な構成要素を示している。同図において、携帯端末4は、前述した表示部8や操作部9の他に、制御手段61と、第三慣性計測部62と、GPS(Global Positioning System:地球測位システム)受信部63と、送受信部64と、記憶部65と、報知部66と、振動子67と、を備えている。
制御手段61は、CPU(中央演算装置)を含んで構成され、記憶部65に記憶されたプログラム69に基づいて携帯端末4の全体を制御する。このCPUがプログラム69にしたがって演算処理を実行することにより、携帯端末4の各機能が実現される。また、上述のとおり、プログラム28により腕時計型端末3の各機能が実現され、プログラム52により6軸センサーユニット6の各機能が実現される。これらのプログラム28,52,69は、プレイヤーPのスイング動作を解析するためのスイング解析プログラムに相当し、これらプログラム28,52,69が、腕時計型端末3、6軸センサーユニット6及び携帯端末4にそれぞれ組み込まれたコンピュータとしての制御手段15,45,61により実行されることで、多点測定装置100のスイング解析システムが実現される。
第三慣性計測部62は、プレイヤーPの動きを検知するための検知手段として、何れも慣性センサーとなる加速度センサー71及びジャイロセンサー72が組み込まれている。加速度センサー71は、直交三軸方向の加速度を計測することができ、ジャイロセンサー72は、直交三軸の各軸回りの角速度を計測することができる。第三慣性計測部62は、携帯端末4が右後ポケット11に収容された状態でプレイヤーPがスイング動作を行なうことで、プレイヤーPの腰P3の加速度や角速度を計測する。第三慣性計測部62により計測された加速度情報や角速度情報は、プレイヤーPのスイング動作時における左腰P3の加速度波形や角速度波形として、制御手段61のスイング計測制御部73に送出される。
GPS受信部63は、携帯端末4の現在位置を取得する位置計測手段を構成し、複数の人工衛星32からの電波を無線で受信することで、携帯端末4の三次元位置(経度、緯度及び高度)を計測し、その位置情報を制御手段45に送出するものである。なお、携帯端末4の現在位置を検出できるものであれば、GPS受信部63以外の位置検出装置を利用してもよい。また、人工衛星32には原子時計が搭載されている。この人工衛星32からは特定の周波数にて極めて正確な時刻信号波が発信されており、これをGPS受信部63により受信することで、携帯端末4の時間軸が規定される。上述のとおり、腕時計型端末3も、人工衛星32からの時刻信号波を受信して時間軸が規定されることから、人工衛星32からの受信電波を利用すれば、腕時計型端末3と携帯端末4の時間軸は同期される。
送受信部64は、有線や無線の通信手段を介して、腕時計型端末3と携帯端末4との間と、6軸センサーユニット6と携帯端末4との間の双方向通信を可能にするものである。そのため携帯端末4は、腕時計型端末3や6軸センサーユニット6等と各種情報を送受信することができる。
記憶部65は、磁気ハードディスク装置や半導体記憶装置などの各種記憶装置を用いて構成され、GPS受信部63が受信した携帯端末4の位置情報の他に、腕時計型端末3や携帯端末4や6軸センサーユニット6からそれぞれ取得したプレイデータと、腕時計型端末3から取得した飛距離情報及び補正飛距離情報と、それらのプレイデータや飛距離情報及び補正飛距離情報から得られる様々な分析情報等の各種情報を書き込み及び読み出し可能となっている。
表示部8は、携帯端末4の本体正面に露出して設けられる液晶モジュールや液晶パネルにより構成され、これらの液晶モジュールや液晶パネルは周知のように、多数のサブ画素を格子状に配列したドットマトリクスによる表示を行なうものである。
操作部9は、プレイヤーPによる操作を受けて、電気的な操作信号を制御手段45に送出するものである。本実施形態の携帯端末4では、表示部8がタッチパネルとなっており、表示部8の表面部が操作部9として機能する。また操作部9は、前述の腕時計型端末3に備えた操作部25と同様に、第一慣性計測部16や第三慣性計側部62による加速度と角速度の計測開始と計測終了を音声により指示する際に、第二指示入力部として機能する。
報知部66は、前述の腕時計型端末3に備えた報知部26と同様に、後述するベスト飛距離時のスイング情報を音声や振動で提示する際に、出力部として機能する。出力部は、例えば音声を出力するスピーカー及び/又は振動を発生するバイブレーターで構成される。
制御手段61は、第三慣性計測部62からの加速度や角速度の波形データを、振動子67からのクロック信号で決められた時刻ごとに取り込んで、プレイヤーPのスイング時における腰P3の動きを計測するスイング計測制御部73を備えている。スイング計測制御部73は、第三慣性計測部62からの加速度と角速度の波形データを受けて、この波形データにクロック部74からの時刻情報を付加したプレイデータを記憶部65に記憶させる。制御手段61に備えたクロック部74は、振動子67からのクロック信号に基づき、携帯端末4としての時刻をカウントするもので、ここでは第三慣性計測部62からの加速度と角速度の波形データに付加する時刻情報として、例えば波形データの開始の時刻や、波形データの開始と終了の時刻や、波形データの開始や終了に関係なく、設定された一定時間ごとの時刻を付加する。或いは、第三慣性計測部62から加速度や角速度の波形データを取り込むたびに、クロック部74でカウントされた時刻を付加してもよい。ここでのクロック部74は、腕時計型端末3の第一慣性計測部16における時刻や、6軸センサーユニット6の第二慣性計測部46における時刻とは別に、携帯端末4の第三慣性計測部62における時刻をカウントする第1クロック部として、当該第三慣性計測部62に設けられる他に、後述する分析部75における基準となる時刻をカウントする第2クロック部として、当該分析部75に設けられる。
制御手段61はさらに、時計型端末3や携帯端末4や6軸センサーユニット6からそれぞれ取り込んだプレイデータの中の波形データを互いに同期させ、これらの同期した波形データと、腕時計型端末3から取り込んだ飛距離情報及び補正飛距離情報と、に基づいて、プレイヤーPによる一連のスイング動作と飛距離との関係を分析する分析部76を備えている。分析部76は、複数の検知手段からの各データとして、第一慣性計測部16からの波形データにクロック部43からの時刻情報を付加したプレイデータと、第二慣性計測部46からの波形データにクロック部57からの時刻情報を付加したプレイデータと、第三慣性計測部62からの波形データにクロック部74からの時刻情報を付加したプレイデータが伝送される測定手段に相当するもので、ここでは多点測定装置100として機能する時刻差算出部77と、データ同期部78と、データ解析部79をそれぞれ備えている。
時刻差算出部77は、クロック部74でカウントする基準となる時刻と、腕時計型端末3のクロック部43や、6軸センサーユニット6のクロック部57でカウントする時刻との差分を算出するもので、携帯端末4の送受信部64から腕時計型端末3のクロック部43にクロックの問合わせ信号を送出して、そのクロック部43から最新の時刻のデータを折返し受信すると、この受信した時刻と携帯端末4のクロック部74でカウントする最新の時刻との差分を計算し、また携帯端末4の送受信部64から6軸センサーユニット6のクロック部57に問合わせ信号を送出して、そのクロック部57から最新の時刻のデータを折返し受信すると、この受信した時刻と携帯端末4のクロック部74でカウントする最新の時刻との差分を計算する機能を有する。時刻差算出部77がどのタイミングで問合わせ信号を送出するのかは、特に限定されない。また本実施形態では、第三慣性計測部62のクロック部74が基準となる時刻そのものをカウントするため、時刻差算出部77が第三慣性計測部62のクロック部74に関する時刻の差分を計算する必要はなく、構成の簡素化を図ることができる。
データ同期部78は、例えば携帯端末4の操作部9からプレイデータの同期を指示する操作が行われると、プレイデータを取得するための指示信号を、腕時計型端末3のスイング計測制御部38や、6軸センサーユニット6のスイング計測制御部56に送出して、腕時計型端末3の記憶部23に記憶されているプレイデータと、6軸センサーユニット6の記憶部48に記憶されているプレイデータとをそれぞれ取り込んで、これらをスイング計測制御部73により第三慣性計測部62からの加速度と角速度の波形データにクロック部74からの時間情報を付加して得られたプレイデータと共に記憶部65に記憶させ、その後に時刻差算出部77で計算された時刻の差分に基づいて、記憶部65に記憶されたそれぞれのプレイデータを互いに同期させる機能を有する。
データ同期部78がどのタイミングで腕時計型端末3や6軸センサーユニットからプレイデータを取り込むのかは、特に限定されない。例えば、携帯端末4の操作部9からプレイデータの同期を指示する操作が行われると、既に携帯端末4との間で通信が確立された腕時計型端末3からのプレイデータだけを取り込み、それとは別に、6軸センサーユニット6と携帯端末4との間で通信が確立されると、操作端末4から操作を行なうことなく、6軸センサーユニット6からのプレイデータを自動的に取り込むようにしてもよい。或いは、6軸センサーユニット6と携帯端末4との間で通信が確立されたときに、6軸センサーユニット6だけでなく、腕時計型端末3からも、操作端末4から操作を行なうことなく、プレイデータを自動的に取り込むことができる構成としてもよい。
データ解析部79は、第一慣性計測部16が計測したプレイヤーPの左手首P1の加速度及び角速度と、第二慣性計測部46が計測したプレイヤーPの背中P2の加速度及び角速度と、第三慣性計測部62が計測したプレイヤーPの腰P3の加速度及び角速度と、飛距離算出部37が算出したボール2の飛距離と、補正飛距離算出部39が算出した補正飛距離と、に基づいてプレイヤーPのスイング動作と飛距離との関係を解析するものである。本実施形態では、プレイヤーPによる一連のスイング動作における、いわゆるタメ、各動作ポイントの時刻、左手首P1の加速度、角速度及び傾き、背中P2の加速度、角速度及び傾き、腰P3の加速度、角速度及び傾き、とボール2の飛距離との関係を解析する。
上述の通り、腕時計型端末3の第一慣性計測部16と、6軸センサーユニット6の第二慣性測定部46と、携帯端末4の第三慣性計測部62の時間軸は、同期されるようになっており、プレイヤーPが一連のスイング動作を行なったときに、第一慣性計測部16により計測された3軸加速度及び3軸角速度の波形データに、クロック部43からの時刻情報を付加した左手首P1のプレイデータと、第二慣性測定部46により計測された3軸加速度及び3軸角速度の波形データに、クロック部57からの時刻情報を付加した背中P2のプレイデータと、第三慣性測定部62により計測された3軸加速度及び3軸角速度の波形データに、クロック部74からの時刻情報を付加した腰P3のプレイデータが、データ同期部78により記憶部65に記憶され、クロック部74がカウントする時刻に対するクロック部43やクロック部57がカウントする時刻の差分を、時刻差算出部77がそれぞれ算出することで、左手首P1、背中P2、腰P3の各プレイデータに含まれる加速度と角速度の波形データが互いに同期される。
図8は、こうした時刻差算出部77とデータ同期部78とによるデータ同期の好適な手順の一例を示したものである。同図において、ステップS1では、携帯端末4からクロックを問合わせるために、携帯端末4の時刻差算出部77が腕時計型端末3や6軸センサーユニット6に向けて、クロックの問合わせ信号を送出する。クロックの問い合わせ信号は、腕時計型端末3と6軸センサーユニット6に向けて一斉に送信してもよいし、別々のタイミングでそれぞれに送信してもよい。
これを受けてステップS2では、腕時計型端末3や6軸センサーユニット6から内部クロックでカウントされている時刻を携帯端末4に返す。腕時計型端末3のクロック部43がクロックの問合わせ信号を受信すると、クロック部43でカウントされた最新の時刻のデータを、送受信部22から携帯端末4に折返し送信する。同様に、6軸センサーユニット6のクロック部57がクロックの問合わせ信号を受信すると、クロック部57でカウントされた最新の時刻のデータを、送受信部47から携帯端末4に折返し送信する。
ステップS3では、携帯端末4が最新の時刻のデータを受信したか否かが判断される。腕時計型端末3や6軸センサーユニット6から最新の時刻のデータを携帯端末4の送受信部22が受信すると、次のステップS4に移行して、時刻差算出部77は受信した最新の時刻のデータと、内部時計となるクロック部74でカウントされている最新の時刻との差分を計測する。ステップS4では、携帯端末4のクロック部74でカウントされる最新の時刻に対して、腕時計型端末3のクロック部43でカウントされる最新の時刻の差分と、6軸センサーユニット6のクロック部57でカウントされる最新の時刻の差分がそれぞれ算出される。なお、ステップS3で携帯端末4が一定時間内に腕時計型端末3や6軸センサーユニット6から最新の時刻のデータを受信できなかった場合には、ステップS1の手順に戻って、クロックの問合わせ信号を再度送出する。
こうして、ステップS4で時刻差算出部77による差分の計算が行われると、以降はデータ同期部78が腕時計型端末3の第一慣性計測部16で計測された波形データと、6軸センサーユニット6の第二慣性測定部46で計測された波形データに加えて、携帯端末4の第三慣性計測部62で計測された波形データとの間で時間的な差分を調整して、これらの波形データの同期をとるようにする。したがって、例えば6軸センサーユニット6のように、検知手段となる第二慣性測定部46に第1クロック部となるクロック部57だけを備えていれば、人工衛星32からの時刻信号波を受信するような高価なGPS受信部とその電源をわざわざ組み込まなくても、第二慣性測定部46で計測された波形データを、他の検知手段となる第一慣性計測部16や第三慣性計測部62で計測された波形データと簡単に同期させることが可能になる。
図9は、データ同期部78で同期された波形データを利用して、データ解析部79による好適な解析結果の一例を示したものである。図中、プレイヤーPの始動からフォロースルーまでの一連のスイング動作において、ωx1は腕(左手首P1)のx軸角速度の波形データであり、ωy1は腕のy軸角速度の波形データであり、ωz1は腕のz軸角速度の波形データであり、ωx3は腰P3のx軸角速度の波形データであり、ωy3は腰P3のy軸角速度の波形データであり、ωz3は腰P3のz軸角速度の波形データである(単位;rps)。また、t1は始動からトップに静止するまでのバックスイングの時間、t2はトップの静止時間、t3は腰P3の切返しから腕の切返しまでのトップの間の時間、t41は腕の切返しからトップとインパクトの中間点までのフォワードスイングの前半時間、t42はトップとインパクトの中間点からインパクトまでのフォワードスイングの後半時間である。
データ解析部79は、データ同期部78で同期されたプレイヤーPの左手首P1、背中P2、腰P3の波形データに基づいて、プレイヤーPのスイング動作を詳細に分析する。図9に示す例では、データ解析部79が、データ同期部78で同期されたプレイヤーPの腕の3軸角速度の波形データωx1,ωy1,ωz1の変化と、腰P3の3軸角速度の波形データωx3,ωy3,ωz3の変化を分析して、プレイヤーPのスイング始動からインパクトを経てフォロースルーに至るまでの各動作ポイントの時刻を特定し、そこから得られた2つの動作ポイントの間の時間を算出する。このデータ解析部79による算出結果は、例えば図1に示すように、携帯端末4の表示部8に画面表示される。表示部8には、プレイヤーPの画像81と共に、バックスイングの時間t1や、トップからインパクトまでの時間t41+t42や、図9では示されていないインパクトからスイング終了までのフォロースルーの時間などが、文字82と数字83の組み合わせでわかりやすく表示される。
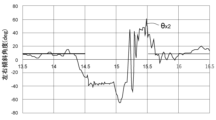
またデータ解析部79は、プレイヤーPのスイング動作を解析するために、データ同期部78で同期された左手首P1の3軸加速度と3軸角速度の波形データや、腰P3の3軸加速度と3軸角速度の波形データや、背中P2の3軸加速度と3軸角速度の波形データを利用することもできる。図10は、プレイヤーPのスイング動作における左手首P1のx軸角速度の波形データωx1と、y軸角速度の波形データωy1と、z軸角速度の波形データωz1をそれぞれ示している。図11は、プレイヤーPのスイング動作における腰P3のx軸角速度の波形データωx3と、y軸角速度の波形データωy3と、z軸角速度の波形データωz3をそれぞれ示している。図12は、プレイヤーPのスイング動作における背中P2のx軸角速度の波形データωx2と、y軸角速度の波形データωy2と、z軸角速度の波形データωz2をそれぞれ示している。図13は、プレイヤーPのスイング動作における背中P2の加速度の波形データから得られる前傾角度θy2を示している。図14は、プレイヤーPのスイング動作における背中P2の加速度の波形データから得られる左右傾き角度θx2を示している。
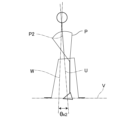
図15に示すように、上述の前傾角度θy2とは、水平面VとプレイヤーPの背中P2に沿った垂直面Uとのなす角度である。また図16に示すように、左右傾き角度θx2とは、鉛直面WとプレイヤーPの背中P2に沿った垂直面Uとのなす角度である。
データ解析部79は、データ同期部78により同期された第一慣性計測部16からの左手首P1の3軸加速度の波形データと、第三慣性計測部62からの腰P3の3軸加速度の波形データから、プレイヤーPが一連のスイング動作を行なったときの左手首P1の3軸合成加速度と、腰P3の3軸合成加速度を算出する。また上述のとおり、腕時計型端末3の飛距離算出部37により、実際のボール2の飛距離がクラブ1の番手に対応して腕時計型端末3の記憶部23に記憶される。データ解析部79は、記憶部23に記憶されるクラブ1の番手に対応した飛距離情報を取り込んで、この飛距離情報を左手首P1の3軸合成加速度情報と、腰P3の3軸合成加速度情報と紐付け(関連付け)して記憶部65に記憶させる。
ここで、プレイヤーPのスイング動作時におけるタメの算出について説明する。図17は、データ解析部79で算出された左手首P1の3軸合成加速度の経時変化を示す折れ線D1と、腰P3の3軸合成加速度の経時変化を示す折れ線D2を示したものである。また、折れ線D1及び折れ線D2のグラフの下側には、プレイヤーPによる一連のスイング動作における、アドレスの静止状態P-1、バックスイングの途中(左手首P1が軽くなり始め)P-2、トップP-3、インパクトP-4、フォローP-5、フィニッシュP-6の各ポイントを示している。
本実施形態では、腰P3の3軸合成加速度のピークD2’が、左手首P1の3軸合成加速度のピークD1’よりも時間的に早く発生したスイング動作を、タメが有るものとする。そして、ピークD1’がピークD2’よりも時間的に早く発生した場合や、ピークD1’とピークD2’との時間差tが0である場合には、タメが無いものとする。また、時間差tのうちタメが有る場合の時間差tをタメの時間Tという。ここでいう「タメ」とは、ゴルフでダウンスイング中の手首のアンコックに使われる一般的な表現とは異なる。なお図17は、タメが有る場合のスイングの左手首P1と腰P3の3軸合成加速度を示している。
データ解析部79は、プレイヤーPの左手首P1の3軸合成加速度情報に基づいて、プレイヤーPの左手首P1の速度を所定の計算式により算出する。左手首P1の速度は、トップP-3からインパクトP-4までのスイングの平均速度や、インパクトP-4の瞬間の単位時間における速度等を算出する。例えば、本実施形態におけるインパクトP-4の瞬間の速度V=5.75m/sである。また、データ解析部79によりプレイヤーPの腰P3の3軸合成加速度情報に基づいて、プレイヤーPの腰P3の速度を所定の計算式により算出する。腰P3の速度は、スイングにおける平均速度や、インパクトP-4の瞬間の単位時間における速度等を算出する。
さらにデータ解析部79は、プレイヤーPの左手首P1の3軸合成加速度情報に基づいて、プレイヤーPの左手首P1の傾きを3軸方向の角度で算出する。左手首P1の傾きは、アドレスの静止状態P-1、バックスイングの途中(左手首P1が軽くなり始め)P-2、トップP-3、インパクトP-4、フォローP-5、フィニッシュP-6の各ポイントで算出する。例えば、本実施形態におけるアドレスの静止状態P-1の左手首P1の傾きの角度は、腕を鉛直に垂らした状態を0度として、θx軸は手首から鉛直下方、θy軸は手首から身体後方、θz軸は手首からアドレスの身体左側であるとすると、θx=4.2deg、θy=-6.8deg、θz=12.6degである。従ってこれは、アドレスで手を鉛直に垂らして、手の甲を左側に向けた姿勢から4.2度フックグリップ側へ捩じり、手首を前方(体の正面側)へ6.8度だし、手を鉛直下方に垂らした姿勢から12.6度手首を内側(右側)へ動かした姿勢になる。
またデータ解析部79は、プレイヤーPの腰P3の3軸合成加速度情報に基づいて、プレイヤーPの腰P3の傾きを3軸方向の角度で算出する。腰P3の傾きは、アドレスの静止状態P-1、バックスイングの途中(左手首P1が軽くなり始め)P-2、トップP-3、インパクトP-4、フォローP-5、フィニッシュP-6の各ポイントで算出する。
このように、プレイヤーPのスイング動作時における各部の加速度や角速度の計測を継続することで、データ同期部78で同期された計測結果が記憶部65に蓄積格納される。データ解析部79は、蓄積された計測結果から、最も飛距離が長かった時のスイング動作時におけるタメの時間T、各動作ポイントの時刻、左手首P1と背中P2と腰P3の加速度、角速度及び傾きを算出し、それらの条件をプレイヤーPのベストスイング(ショット)として記憶部65に記憶する。このベストスイングにおけるタメの時間T、各動作ポイントの時刻、左手首P1と背中P2と腰P3の加速度、角速度及び傾きは、携帯端末4の表示部8に表示することができ、プレイヤーPはこれらの解析結果の情報を確認することができる。また、飛距離が長かった所定回数(例えば、10回)のスイング動作時におけるタメの時間T、左手首P1と背中P2と腰P3の加速度、角速度及び傾きの平均値を算出し、その結果を表示部8に表示することもできる。なお、記憶部65に記憶されている情報であれば、飛距離が短かったスイングの各種情報を表示部8に表示することもできる。また、飛距離情報に代わって、若しくは飛距離情報と共に、補正飛距離算出部39で算出した補正飛距離をデータ解析部79が利用してもよい。
図18は、本実施形態の多点測定装置100を構成するセンター装置91の主な構成要素を示している。同図において、センター装置91は、例えば通信手段としてインターネットなどのネットワークに接続するセンターサーバなどで構成され、制御手段92と、送受信部93と、記憶部94と、を備えている。
制御手段92は、CPU(中央演算装置)を含んで構成され、記憶部94に記憶されたプログラム95に基づいて携帯端末4の全体を制御する。このCPUがプログラム95にしたがって演算処理を実行することにより、センター装置91の各機能が実現される。特に本実施形態では、センター装置91の制御手段92を診断部96として機能させるために、センター装置91側のアドバイス診断情報提示プログラムがプログラム95に組込まれ、腕時計型端末3の制御手段15をアドバイス算出部42として機能させるために、腕時計型端末3側のアドバイス診断情報提示プログラムがプログラム28に組込まれ、携帯端末4の制御手段61を分析部76として機能させるために、携帯端末4側のアドバイス診断情報提示プログラムがプログラム69に組込まれている。そして、これらプログラム28,69,95が、携帯端末4及びセンター装置91にそれぞれ組み込まれたコンピュータとしての制御手段15,61,92により実行されることで、多点測定装置100のアドバイス診断情報提示システムが実現される。
送受信部93は、有線や無線の通信手段を介して、センター装置91と携帯端末4との間の双方向通信を可能にするものである。上述のように、プレイヤーPの携帯端末4と腕時計型端末3も双方向に通信が可能となっており、センター装置91は、携帯端末4や腕時計型端末3等と各種情報を送受信することができる。なお図18では、センター装置91の送受信部93に1台の携帯端末4だけが接続されているが、実際にはゴルフ場Gを利用する別な多数のプレイヤーPの携帯端末4も接続が可能である。
記憶部94は、磁気ハードディスク装置や半導体記憶装置などの各種記憶装置を用いて構成され、後述する診断部96が携帯端末4のデータ解析部79からの分析結果データを受けて、診断データを生成するのに必要な各種情報を書き込み及び読み出し可能となっている。携帯端末4のデータ解析部79は、データ同期部78で同期されたプレイヤーPの左手首P1,背中P2及び腰P3の加速度と角速度の各波形データから、プレイヤーPのスイング時における各部の動きを正確に分析し、その分析結果をデータとしてセンター装置91の送受信部93に問合わせ送信する機能を有する。
診断部96は、携帯端末4のデータ解析部79からの分析結果データに基づき、記憶部94に予め記憶登録された全てのゴルフクラブの一覧(リスト)データから、プレイヤーPに適合したゴルフクラブを選択する等して、プレイヤーPに必要な診断データを生成し、この診断データを送受信部93から問合わせを受けた携帯端末4に送信する機能を有する。携帯端末4に送信された診断データは、必要に応じて通信が可能な腕時計型端末3に転送してもよい。
また図3に示すように、腕時計型端末3の制御手段15は、アドバイス算出部42を備えている。アドバイス算出部42は、携帯端末4のデータ解析部79からの分析結果データを受けて、プレイヤーPに対して助言・忠告等のアドバイスを提示する際のアドバイス情報を算出する。アドバイスは、腕時計型端末3が備える報知部26から音声により報知することや、腕時計型端末3の表示部24に文字、図形や地図等により表示することが可能である。アドバイス情報は、表示部24に表示するか、報知部26により音声により報知するか、その両方とするか、を操作部25への操作により選択することができる。
以下、多点測定装置100のアドバイス診断情報提示システムで実現する具体的なアドバイス情報について説明する。プレイヤーPが、集音部21への音声又は操作部25への操作により、ゴルフ場Gのコース情報を入力すると、アドバイス算出部42は記憶部23から該当するコースの地図情報35を読み出し、表示部24に表示する。なお、この地図情報35の表示は、腕時計型端末3を装着したプレイヤーPの位置情報を計測し、予め記憶部23に記憶された当該コースの位置情報から、プレイヤーPが当該コース内に入ったことを確認した時点で表示部24に自動的に表示するようにしてもよい。
また、地図情報35からバンカーG4や池G5等のハザードの情報を読み出し、ハザード情報を報知する。ハザード情報は、バンカーG4や池G5等の位置情報や、現在位置から当該バンカーG4や池G5等までの距離情報等であり、また、「左バンカー注意!」等の文言を表示部24に表示したり、報知部26により音声で報知したりするものである。なお、表示部24に表示されるコースの地図情報35はカラーで表示され、ティーグランドG1、フェアウェイG2、ラフG3、バンカーG4、池G5、グリーンG6はそれぞれ異なる色で表示されるため、ハザード情報は視覚的に確認し易くなっている。
プレイヤーPがショットすることを、集音部21への音声又は操作部25への操作により、腕時計型端末3に入力すると、アドバイス算出部42はプレイヤーPの位置情報と地図情報35から、グリーンG6までの距離を算出する。また、記憶部23からプレイヤーPの平均飛距離や平均補正飛距離を読み出し、グリーンG6までの距離に適した推奨するクラブ1の番手を提示する。このとき、表示部24に表示されたコースの地図情報35に推奨するクラブ1の番手のプレイヤーPの過去の平均飛距離を円弧線85及び数値86で表示する(図2参照)。
また、アドバイス算出部42は、推奨するクラブ1を使用した場合のプレイヤーPのショットの左右方向へのずれの割合や傾向等についても算出する。アドバイス算出部42は、プレイヤーPのショットの左右方向へのずれの割合を記憶部23から読み出し、表示部24又は報知部26により提示する。左右方向へのずれについての提示方法は、ずれの割合を表示部24に表示するか、報知部26により音声で報知してもよく、また、ずれの割合からプレイヤーPのショットの傾向を算出し、その傾向を「左方向へのずれ65%、注意!」等の文言で表示部24に表示したり、報知部26により音声で報知したりすることができる。
また、アドバイス算出部42は、携帯端末4のデータ解析部79からの分析結果データに基づき、プレイヤーPの過去の飛距離が長かったショットや、左右方向のズレが無かったショットのタメの時間Tの平均の長さ、各動作ポイントの時刻、左手首P1の加速度、角速度及び傾き、背中P2の加速度、角速度及び傾きや、腰P3の加速度、角速度及び傾きを算出し、表示部24に表示したり、報知部26により報知したりすることができる。
また、プレイヤーPによる次のショットが、打ち上げになるか、打ち下ろしになるか、高低差Hが事前にわかっている場合には、その旨を音声又は操作部25の操作により腕時計型端末3に入力することで、記憶部23に記憶されているプレイヤーPの打ち上げ時、打ち下ろし時、当該高低差Hに対応した過去の平均飛距離を読み出し、表示部24に表示することもできる。
また、ショット地点の状態(ティーグランドG1、フェアウェイG2、ラフG3、バンカーG4、池G5、上り傾斜、下り傾斜、風の強さ、風の方向等)を音声又は操作部25の操作により腕時計型端末3に入力することで、記憶部23に記憶されているプレイヤーPのその状態に対応した過去の平均飛距離を読み出し、表示部24に表示することもできる。
アドバイス算出部42が算出するアドバイス情報は、記憶部23,65に記憶された情報に基づいて算出されるが、例えば、過去のショットの情報中から飛距離が極端に短い失敗ショットの情報を排除した平均飛距離を算出し、報知するようにしてもよい。
図19は、本実施形態の多点測定装置100を利用して、プレイヤーPによる自身のスイング分析から新たなゴルフクラブ1の購買までの手順を示したものである。同図において、ステップS11の「1.自分を知る」では、プレイヤーPが自身のスイングを正しく分析するために、プレイヤーPの手首(左手首P1),背中P2,腰P3のそれぞれに、6軸センサーを搭載した腕時計型端末(ウェアブル端末)3,携帯端末(スマートフォン)4,6軸センサーユニット(センサーユニット)6を装着する。ここでいう6軸センサーは、何れも検知手段である第一慣性計測部16,第二慣性計測部46,第三慣性計測部62に相当する。その後、プレイヤーPがスイング動作を行なうことにより、第一慣性計測部16で計測された左手首P1の3軸加速度と3軸角速度の波形データと、第二慣性計測部46で計測された背中P2の3軸加速度と3軸角速度の波形データと、第三慣性計測部62で計測された腰P3の3軸加速度と3軸角速度の波形データが、それぞれ測定手段となる携帯端末4の制御手段61に取り込まれ、データ同期部78により時間軸で同期された6軸センサーの計測結果が、記憶部65に格納記憶される。
またステップS11では、各打ごとに腕時計型端末3の集音部21や操作部21からクラブ1の番手を入力し、GPS受信部17で計測された位置情報や、気圧情報18で計測された気圧情報や、気温計測部19で計測された気温情報や、高度計測部20で計測された高度情報を、制御手段15の飛距離算出部37と補正飛距離算出部39が取り込むことで、クラブ別の高低差や気温や気圧を考慮した平均飛距離等が、腕時計型端末3の表示部24に表示される。飛距離算出部37や補正飛距離算出部39で算出された各打ごとの飛距離や補正飛距離は、携帯端末4にも送信され記憶部65に記憶されるので、上述した6軸センサーの計測結果から、最も飛距離が長かった時のスイング動作時における解析結果の情報を、データ解析部79が携帯端末4の表示部8に適確に表示する。これにより、プレイヤーPは何時でもベストショットの比較が可能になり、ラウンド中にスイングでどの部分の動きがベストショット時と違うのかを、正しく判断できる。
ステップS12の「2.自分に合ったクラブを選ぶ」では、プレイヤーPが上述した携帯端末4のデータ解析部79と、センター装置91の診断部96とによる総合スイング分析センターを活用する。データ分析部79は上述のように、データ同期部78で同期されたプレイヤーPの左手首P1,背中P2及び腰P3の加速度と角速度の各波形データから、プレイヤーPのスイング時における各部の動きを各打ごとに詳細に分析し、その分析結果のデータをセンター装置91に向けて問合わせ送信する。センター装置91の診断部96は、携帯端末4のデータ解析部79からの分析結果データに基づき、プレイヤーPに最適なゴルフクラブのリストを診断データとして生成し、この診断データを問合わせのあった携帯端末4に返送する。携帯端末4の表示部8には、診断部96からの診断データに基づくクラブ診断の結果が画面表示される。
ステップS13の「3.サブスクリプション会員になる」では、プレイヤーPがサブスクリプション会員として、一定期間の利用権に相当する料金を支払うことで、ステップS12で携帯端末4の表示部8に画面表示されたプレイヤーPに最適なクラブを、ゴルフ場Gやその他の施設などで、何時でも制限なく自由にお試し利用(クラブ購買)できる。これにより、プレイヤーPはいわゆる手ぶらでのゴルフが可能となり、本実施形態の多点測定装置100が将来的にゴルフ人口の増加とゴルフ場Gの収益性向上に寄与することになる。
以上のように本実施形態では、被測定体であるプレイヤーPに設けた検知手段としての第一慣性計測部16,第二慣性測定部46及び第三慣性測定部62と、複数の検知手段として第一慣性計測部16,第二慣性測定部46及び第三慣性測定部62からの各データが伝送される測定手段となる携帯端末4の制御手段61と、からなる多点測定装置100において、検知手段となる第一慣性計測部16には、第1振動子となる振動子27が生成したクロック信号により、第一慣性計測部16で固有の第1時刻をカウントする第1クロック部としてのクロック部43が設けられ、また第二慣性計測部46には、第1振動子となる振動子49が生成したクロック信号により、第二慣性計測部46で固有の第1時刻をカウントする第1クロック部としてのクロック部57が設けられ、さらに第三慣性計測部62には、第1振動子となる振動子67が生成した第1クロック信号により、第三慣性計測部62で固有の第1時刻をカウントする第1クロック部としてのクロック部74が設けられている。そして、携帯端末4の制御手段61は、第2振動子となる振動子67が生成した第2クロック信号により、基準となる第2時刻をカウントする第2クロック部としてのクロック部74と、クロック部43,57にそれぞれ問合わせ信号を送出して、そのクロック部43,57から第1時刻のデータを折返し受信すると、受信した第1時刻とクロック部74でカウントする第2時刻との差分を計算する時刻差算出部77と、時刻差算出部77で計算された差分に基づいて、第一慣性計測部16,第二慣性測定部46及び第三慣性測定部62からの各データを同期させるデータ同期部78と、を備えている。
これにより、それぞれでクロック部43,57,74がカウントする第1時刻が異なっていても、制御手段61の時刻差算出部77により基準となる第2時刻との差分を算出すれば、以後はデータ同期部79が第一慣性計測部16、第二慣性測定部46及び第三慣性測定部62のそれぞれからのデータを時間的に差分調整して同期を計り、制御手段61で同時刻における各データの値を正しく測定できる。したがって、例えば人工衛星32に搭載される原子時計のような特殊な時刻信号源を利用することなく、余計な電源の使用を抑えて、コンパクトで安価な装置構成を可能とする多点測定装置100を提供できる。
また、本実施形態の多点測定装置100は、データ同期部78で同期された第一慣性計測部16、第二慣性測定部46及び第三慣性測定部62からの各データに基づき、プレイヤーPの物理的現象となる例えば加速度や角速度の変化を分析する分析手段としてのデータ解析部79と、そのデータ解析部79による分析結果から、プレイヤーPに関する例えば最適なクラブ1を提示するための診断データを出力する診断手段としての診断部96と、をさらに備えている。
この場合、データ同期部79で同期された第一慣性計測部16,第二慣性測定部46及び第三慣性測定部62からの各データに基づき、データ解析部79がプレイヤーPの物理的現象の変化を詳細に分析することで、プレイヤーPに関する診断データを診断部96から取得することが可能になる。
なお、本発明は上記実施形態に限定されるものではなく、本発明の要旨の範囲内において、種々の変形実施が可能である。例えば本実施形態では、携帯端末4における第1振動子と第2振動子を共通の振動子67とし、第1クロック部と第2クロック部を共通のクロック部74とすることで、多点測定装置100としての構成の簡素化を図っているが、別々の振動子とクロック部で構成しても何等構わない。