JP7099757B1 - Semiconductor wafer polishing equipment - Google Patents
Semiconductor wafer polishing equipment Download PDFInfo
- Publication number
- JP7099757B1 JP7099757B1 JP2021018878A JP2021018878A JP7099757B1 JP 7099757 B1 JP7099757 B1 JP 7099757B1 JP 2021018878 A JP2021018878 A JP 2021018878A JP 2021018878 A JP2021018878 A JP 2021018878A JP 7099757 B1 JP7099757 B1 JP 7099757B1
- Authority
- JP
- Japan
- Prior art keywords
- semiconductor wafer
- polishing
- pressing force
- attached
- chuck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B37/00—Lapping machines or devices; Accessories
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B27/00—Other grinding machines or devices
- B24B27/0076—Other grinding machines or devices grinding machines comprising two or more grinding tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B37/00—Lapping machines or devices; Accessories
- B24B37/005—Control means for lapping machines or devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B37/00—Lapping machines or devices; Accessories
- B24B37/11—Lapping tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B37/00—Lapping machines or devices; Accessories
- B24B37/27—Work carriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B37/00—Lapping machines or devices; Accessories
- B24B37/34—Accessories
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B41/00—Component parts such as frames, beds, carriages, headstocks
- B24B41/02—Frames; Beds; Carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B47/00—Drives or gearings; Equipment therefor
- B24B47/02—Drives or gearings; Equipment therefor for performing a reciprocating movement of carriages or work- tables
- B24B47/04—Drives or gearings; Equipment therefor for performing a reciprocating movement of carriages or work- tables by mechanical gearing only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B47/00—Drives or gearings; Equipment therefor
- B24B47/10—Drives or gearings; Equipment therefor for rotating or reciprocating working-spindles carrying grinding wheels or workpieces
- B24B47/12—Drives or gearings; Equipment therefor for rotating or reciprocating working-spindles carrying grinding wheels or workpieces by mechanical gearing or electric power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B47/00—Drives or gearings; Equipment therefor
- B24B47/10—Drives or gearings; Equipment therefor for rotating or reciprocating working-spindles carrying grinding wheels or workpieces
- B24B47/16—Drives or gearings; Equipment therefor for rotating or reciprocating working-spindles carrying grinding wheels or workpieces performing a reciprocating movement, e.g. during which the sense of rotation of the working-spindle is reversed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B47/00—Drives or gearings; Equipment therefor
- B24B47/20—Drives or gearings; Equipment therefor relating to feed movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B49/00—Measuring or gauging equipment for controlling the feed movement of the grinding tool or work; Arrangements of indicating or measuring equipment, e.g. for indicating the start of the grinding operation
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
- Mechanical Treatment Of Semiconductor (AREA)
- Grinding And Polishing Of Tertiary Curved Surfaces And Surfaces With Complex Shapes (AREA)
Abstract
【課題】半導体ウェハーの外周部の研磨加工精度を長期間に渡って高精度に維持することができるようにする。【解決手段】研磨装置10は半導体ウェハーWを保持するチャック21が設けられるコラム17と、ベース部材13に往復動自在に装着される往復動台14と、研磨パッド66を回転自在に支持する研磨ヘッド55と、研磨ヘッド55が取り付けられるスライドプレート54を支持する支持テーブル48と、を有し、往復動台14を介して半導体ウェハーに研磨ヘッド55に向かう押付力を与える押付力付与部材の押付シリンダ41がベース部材13に装着され、押付力付与部材により半導体ウェハーに加えられる実荷重を測定する実荷重測定器のロードセル76が支持テーブルとスライドプレートとの間に装着されている。【選択図】図2An object of the present invention is to maintain the polishing accuracy of the outer peripheral portion of a semiconductor wafer at high accuracy over a long period of time. A polishing apparatus (10) includes a column (17) provided with a chuck (21) for holding a semiconductor wafer (W), a reciprocating table (14) mounted on a base member (13) so as to freely reciprocate, and a polishing apparatus (10) which rotatably supports a polishing pad (66). A pressing force imparting member having a head 55 and a support table 48 supporting a slide plate 54 to which the polishing head 55 is attached, and applying a pressing force toward the polishing head 55 to the semiconductor wafer via the reciprocating table 14. A cylinder 41 is mounted on the base member 13, and a load cell 76 of an actual load measuring device for measuring the actual load applied to the semiconductor wafer by the pressing force imparting member is mounted between the support table and the slide plate. [Selection drawing] Fig. 2
Description
本発明は、半導体ウェハーの外周部を研磨加工するウェハー研磨装置に関する。 The present invention relates to a wafer polishing apparatus that polishes the outer peripheral portion of a semiconductor wafer.
半導体集積回路の材料に使用される半導体ウェハーとしては、シリコンの単結晶からなるものが一般的であり、これはシリコンウェハーと言われる。シリコンウェハーは、原材料物質を円柱状に加工したインゴットを薄くスライスすることにより製造され、表面に半導体集積回路の配線や素子などの回路パターンが多数形成される。多数の回路パターンが形成されたシリコンウェハーは、ダイシング加工により半導体チップ単体に切り出される。 As a semiconductor wafer used as a material for a semiconductor integrated circuit, a single crystal of silicon is generally used, and this is called a silicon wafer. A silicon wafer is manufactured by thinly slicing an ingot made by processing a raw material into a columnar shape, and a large number of circuit patterns such as wiring and elements of a semiconductor integrated circuit are formed on the surface. A silicon wafer on which a large number of circuit patterns are formed is cut into a single semiconductor chip by dicing.
半導体ウェハーの外周部には、結晶方位を示すために、オリエンテーション用のノッチと言われるV字形状の切欠き部、またはオリエンテーション用のフラットと言われる直線部が研削加工される。半導体ウェハーに回路パターンを形成する工程においては、ノッチまたはフラットによりウェハーの向きが合わせられる。 A V-shaped notch called an orientation notch or a straight line portion called an orientation flat is ground on the outer peripheral portion of the semiconductor wafer in order to indicate the crystal orientation. In the process of forming a circuit pattern on a semiconductor wafer, the orientation of the wafer is aligned by a notch or a flat.
半導体ウェハーの外周部に加工されたオリエンテーション用のノッチやフラットは、研磨装置により研磨加工される。研磨加工するときには半導体ウェハーはチャックにより保持され、特許文献1には半導体ウェハーを保持するためのチャックが記載されている。チャックは往復動台に装着され、ス往復動台はベース部材に往復動自在に配置され、半導体ウェハーの外周部を研磨加工する円板形状の研磨パッドは支持台に回転自在に取り付けられている。チャックに保持された半導体ウェハーは往復動台により研磨パッドに向けて押し付けられる。 Orientation notches and flats machined on the outer peripheral portion of the semiconductor wafer are polished by a polishing device. The semiconductor wafer is held by a chuck during polishing, and Patent Document 1 describes a chuck for holding the semiconductor wafer. The chuck is mounted on the reciprocating table, the reciprocating table is reciprocally arranged on the base member, and the disk-shaped polishing pad for polishing the outer peripheral portion of the semiconductor wafer is rotatably attached to the support table. .. The semiconductor wafer held by the chuck is pressed against the polishing pad by the reciprocating table.
研磨パッドから半導体ウェハーの外周部に研磨に必要な荷重を与えるために、往復動台には空気圧シリンダからなる押付シリンダが取り付けられている。研磨加工時に研磨パッドから半導体ウェハーに加えられる押付力を測定するために、押付シリンダのロッドと往復動台との間にロードセルを装着することが試みられている。 In order to apply the load required for polishing from the polishing pad to the outer peripheral portion of the semiconductor wafer, a pressing cylinder made of a pneumatic cylinder is attached to the reciprocating table. In order to measure the pressing force applied to the semiconductor wafer from the polishing pad during the polishing process, an attempt is made to mount a load cell between the rod of the pressing cylinder and the reciprocating table.
チャックが設けられた往復動台はベース部材に移動自在に装着されており、往復動台にはベース部材に対して摺動抵抗が加えられる。さらに、チャックには複数の配線や配管が接続されており、配線や配管の抵抗がスライドテーブルに加えられる。これらの抵抗が経時変化や経年変化すると、研磨パッドから半導体ウェハーに加えられる実際の研磨荷重が不安定になることが考えられる。 The reciprocating table provided with the chuck is movably mounted on the base member, and sliding resistance is applied to the reciprocating table with respect to the base member. Further, a plurality of wires and pipes are connected to the chuck, and the resistance of the wires and pipes is added to the slide table. If these resistances change over time or over time, it is possible that the actual polishing load applied from the polishing pad to the semiconductor wafer becomes unstable.
上述のように、研磨パッドから半導体ウェハーに加えられる押付力を検出するために、押付シリンダにロードセルを設けると、ロードセルは押出シリンダによる往復動台への押付荷重が指令値通りに出力されているか否かを監視することになる。このため、往復動台に加えられる摺動抵抗が経時変化や経年変化すると、研磨パッドから半導体ウェハーに加えられる実荷重そのものをロードセルにより正確に監視することができなくなる。押付力の設定値に対する実荷重の誤差が発生すると、半導体ウェハーの外周部のノッチやオリエンテーションフラットの研磨加工の精度が低下することになる。 As described above, if a load cell is provided in the pressing cylinder in order to detect the pressing force applied to the semiconductor wafer from the polishing pad, does the load cell output the pressing load on the reciprocating table by the extrusion cylinder according to the command value? It will be monitored whether or not. Therefore, if the sliding resistance applied to the reciprocating table changes over time or changes over time, the actual load itself applied to the semiconductor wafer from the polishing pad cannot be accurately monitored by the load cell. If an error in the actual load with respect to the set value of the pressing force occurs, the accuracy of the polishing process of the notch on the outer peripheral portion of the semiconductor wafer and the orientation flat will decrease.
本発明の目的は、半導体ウェハーの外周部の研磨加工精度を長期間に渡って高精度に維持することができるようにすることにある。 An object of the present invention is to enable the polishing process accuracy of the outer peripheral portion of a semiconductor wafer to be maintained with high accuracy for a long period of time.
本発明の半導体ウェハーの研磨装置は、半導体ウェハーを保持するチャックが設けられるコラムと、ベース部材に往復動自在に装着され、前記コラムが取り付けられる往復動台と、前記往復動台の往復動方向に対して直角方向の回転中心軸を有し前記半導体ウェハーの外周部を研磨する研磨パッドを、回転自在に支持する研磨ヘッドと、前記研磨ヘッドが取り付けられるスライドプレートを、前記往復動台の移動方向と同一の方向に移動自在に支持する支持テーブルと、前記ベース部材に装着され、前記往復動台を介して前記半導体ウェハーに前記研磨ヘッドに向かう押付力を与える押付力付与部材と、前記支持テーブルと前記スライドプレートの一方に取り付けられ、前記押付力付与部材により前記研磨パッドと前記半導体ウェハーに加えられる実荷重を測定する実荷重測定器と、を有する。 The semiconductor wafer polishing apparatus of the present invention has a column provided with a chuck for holding the semiconductor wafer, a reciprocating table that is reciprocally mounted on a base member and to which the column is mounted, and a reciprocating direction of the reciprocating table. The reciprocating table moves a polishing head that rotatably supports a polishing pad that has a rotation center axis perpendicular to the direction of rotation and polishes the outer peripheral portion of the semiconductor wafer, and a slide plate to which the polishing head is attached. A support table that is movably supported in the same direction as the direction, a pressing force applying member that is mounted on the base member and applies a pressing force toward the polishing head to the semiconductor wafer via the reciprocating table, and the support. It has an actual load measuring device which is attached to one of the table and the slide plate and measures the actual load applied to the polishing pad and the semiconductor wafer by the pressing force applying member.
研磨パッドから半導体ウェハーの外周部に加えられる押付力である実荷重を高精度に設定することができるので、半導体ウェハーの外周部の研磨加工精度を長期間に渡って維持することができる。 Since the actual load, which is the pressing force applied from the polishing pad to the outer peripheral portion of the semiconductor wafer, can be set with high accuracy, the polishing processing accuracy of the outer peripheral portion of the semiconductor wafer can be maintained for a long period of time.
以下、本発明の実施の形態を図面に基づいて詳細に説明する。図1~図3に示す半導体ウェハーの研磨装置10は、半導体ウェハーWの外周部に予め加工されたオリエンテーション用のノッチを研磨加工する状態を示している。この研磨装置10はノッチのみならず、オリエンテーション用のフラットも研磨加工することができる。図4aは外周部にオリエンテーション用のノッチVが加工されたワークつまり半導体ウェハーWを示し、図4bはフラットFが加工された半導体ウェハーWを示す。
Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. The semiconductor
研磨装置10は、図1~図3に示されるように、ワークである半導体ウェハーWを保持するチャックを駆動するチャック駆動ユニット11と、ワークWの外周部に予め加工されたノッチVまたはフラットFを研磨加工する研磨パッドを駆動するパッド駆動ユニット12とを備えている。
As shown in FIGS. 1 to 3, the
(チャック駆動ユニット)
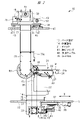
チャック駆動ユニット11は、図5および図6に示されるように、水平方向に設置されたベース部材13に、直線方向に往復動自在に装着される往復動台14を備えている。往復動台14にはガイドブロック15が取り付けられ、ガイドブロック15はベース部材13に固定されるガイドレール16に沿って移動自在に装着されており、往復動台14はガイドレール16に案内されて移動する。往復動台14の移動方向は図1および図6に示すX軸方向であり、チャック駆動ユニット11の図6に示された面を正面とすると、往復動台14の移動方向は左右方向となる。なお、図1および図5には、ベース部材13は図示省略されている。
(Chuck drive unit)
As shown in FIGS. 5 and 6, the
往復動台14にはコラム17が取り付けられており、コラム17に回転自在に揺動軸18が設けられ、揺動軸18の先端部はコラム17の正面から突出している。揺動軸18はX軸方向に対して直角方向のY軸方向に延びる揺動中心軸Oを有し、揺動軸18には揺動アーム19が設けられている。揺動アーム19には、半導体ウェハーWを保持するチャック21が設けられている。チャック21は、揺動軸18を中心として、図5および図6に示されるように、上下方向に角度θの範囲で揺動自在であり、図示する場合においては、水平位置に対して上下それぞれ70°の範囲で揺動する。
A
チャック21は揺動アーム19に取り付けられる駆動ケース22を有し、駆動ケース22の一方側には保持部材23が設けられ、他方側には可動式の保持部材24が設けられている。保持部材23はそれぞれX軸方向に延びる2本の保持棒25を備え、それぞれの保持棒25の先端にはワークWの外周面に接触する2つの爪部25aが設けられている。2つの爪部25aの間には、図5に示されるように、研磨加工用のスペース26が形成されている。一方、保持部材24は保持棒25に対して直角方向に延びており、両端部にはワークWの外周面に接触する2つの爪部24aが設けられている。2つの爪部24aの間隔は、スペース26よりも広い間隔で離れている。それぞれの爪部25a、24aは、フッ素ゴムなどのように適当な弾性を有するとともに耐薬品性を有する材料により形成されている。
The
駆動ケース22の内部には図示しないエアシリンダが組み込まれており、保持部材24はエアシリンダのロッド27に取り付けられている。保持部材24の爪部24aはエアシリンダにより保持部材23の爪部25aに対して接近する方向と離反する方向とに往復動自在であり、爪部25a、24aがワークWの外周に接触することにより、ワークWはチャック21に支持される。4つの爪部25a、24aによりワークWを支持する支持面が形成され、支持面は揺動中心軸Oを中心に角度θの範囲で揺動する。支持面の揺動中心部つまりワークWの揺動中心部は、2つの爪部25aの間のスペース26における揺動中心軸Oの位置である。
An air cylinder (not shown) is incorporated inside the
駆動ケース22には内部のエアシリンダに圧縮空気を給排するためのホース等からなる配管28が図3に示されるように取り付けられている。駆動ケース22にはさらにエアシリンダの駆動を制御するための制御信号を送る信号ケーブル等からなる配線29が取り付けられている。配管28と配線29は外部の制御機器に接続されており、制御機器とコラム17との間には、図示しない配線と配管が設けられている。
A
コラム17の下面には駆動ボックス31が固定されており、駆動ボックス31はベース部材13に形成された貫通孔32からベース部材13の下方に突出している。駆動ボックス31の正面にはワーク揺動用の電動モータ33が取り付けられており、この電動モータ33の主軸に設けられたプーリ34が駆動ボックス31内に設けられ、揺動軸18に設けられたプーリ35がコラム17内に設けられ、両方のプーリ34、35の間にはベルト36が掛け渡されている。電動モータ33の主軸の回転はベルト36を介してチャック21に伝達され、ワークWは揺動中心部を中心に電動モータ33により駆動される。
A
(コラムの駆動)
ベース部材13の下面には、図6に示されるように、ガイドレール37がX軸方向に延びて取り付けられており、ガイドレール37には位置決め用の電動モータ38が取り付けられている。ガイドレール37に装着されたスライドブロック39は、電動モータ38の主軸により回転駆動されるボールねじにねじ結合され、電動モータ38によりスライドブロック39はX軸方向に往復動される。
(Drive of column)
As shown in FIG. 6, a
空気圧シリンダからなる押付シリンダ41がブラケット42を介してスライドブロック39に取り付けられ、押付シリンダ41のピストンロッド43は、駆動ボックス31に固定された取付台67を貫通して連結ブロック44に押し付けられている。これにより、押付シリンダ41のピストンロッド43を突出させる方向に駆動すると、コラム17は図2において左方向に駆動される。ピストンロッド43には、取付台67の内面に接触するナットなどからなる当接部材43aが設けられており、ピストンロッド43が後退移動するときには、当接部材43aが取付台67に接触してコラム17は図2において右方向に駆動される。このように、チャック21は、電動モータ38によって、図2および図6に示される加工位置とこの位置よりも図6において右方向のワーク搭載位置との間を往復動する。
The
(パッド駆動ユニット)
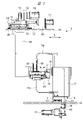
パッド駆動ユニット12は図7に示されるように支持台45を備えている。支持台45には、図7~図9に示されるように、2本のガイドレール46がY軸方向に延びて取り付けられており、それぞれのガイドレール46に装着されるスライドブロック47には支持テーブル48が取り付けられている。支持台45には架台49が取り付けられ、架台49にはオシレーション用の電動モータ51が取り付けられ、電動モータ51の主軸に取り付けられた送りねじ52は、支持テーブル48に固定されたナット組立体53のナットにねじ結合されている。したがって、電動モータ51により支持テーブル48はY軸方向に移動する。なお、図1、図8および図9においては、支持台45は図示省略されている。
(Pad drive unit)
The
スライドプレート54が支持テーブル48に往復動台14と同一の方向であるX軸方向に移動自在に装着されており、スライドプレート54の下面には、研磨ヘッド55が上下方向つまりZ軸方向に取り付けられている。研磨ヘッド55は中空の柱形状のケース部材により形成されており、支持テーブル48に形成された貫通孔56と、支持台45に形成された貫通孔57とを貫通して支持台45の下方に突出している。スライドプレート54の上面に垂直に固定された支持板58の正面側には、駆動側のプーリ61が回転自在に装着されている。研磨ヘッド55の下端部には研磨シャフト62が回転自在に装着され、研磨シャフト62に取り付けられる従動側のプーリ63が研磨ヘッド55内に配置され、研磨ヘッド55の背面側に突出している。両方のプーリ61、63の間にはベルト64が掛け渡されている。図8および図9に示されるように、支持板58の背面側には研磨加工用の電動モータ65が装着され、駆動側のプーリ61は電動モータ65の主軸に取り付けられている。電動モータ65に電力供給を行う給電線は、外部に固定された制御機器に接続されている。
The
(研磨パッド)
円板形状の2つの研磨パッド66が研磨シャフト62に装着されており、研磨パッド66は電動モータ65によりベルト64を介して回転駆動される。研磨パッド66の回転中心軸PはY軸方向であり、往復動台14の往復動方向であるX軸方向に対して直角方向であり、回転中心軸Pは支持テーブル48と平行な方向である。回転中心軸Pを中心に回転する研磨パッド66の外周部の研磨面は、ワークWの外周部を横切る方向に回転移動し、ワークWの外周部を研磨加工する。研磨ヘッド55には複数の研磨パッド66が設けられているので、ノッチVの研磨加工はいずれかの研磨パッド66で行うことができる。1つの研磨パッド66が摩耗したら、他の1つの研磨パッド66により新たなワークWのノッチVを加工することができる。これにより、研磨パッド66を新たな研磨パッド66に交換するまでの時間を延ばすことができる。
(Polishing pad)
Two disc-shaped
(研磨パッドの押付力)
研磨パッド66により半導体ウェハーWの外周部を研磨加工するときには、押付シリンダ41により連結ブロック44、駆動ボックス31、コラム17およびチャック21を介してワークWには研磨パッド66に向けて押付力が加えられる。半導体ウェハーWから研磨パッド66に押付力が加えられると、反力として研磨パッド66から半導体ウェハーWの外周部に押付力が加えられる。このように、押付シリンダ41は、半導体ウェハーWに研磨パッド66に向かう押付力を加える押付力付与部材を構成している。押付力付与部材としては、押付シリンダ41に限られることなく、送りねじを駆動する電動モータや圧縮コイルばね等により連結ブロック44を介して押付力を付与するようにしてもよい。
(Pressing force of polishing pad)
When the outer peripheral portion of the semiconductor wafer W is polished by the
図6に示されるように、駆動ボックス31に固定された取付台67には、押付シリンダ41の押し込みストロークを検出するための押し込み量測定器68が設けられている。電動モータ38によりスライドブロック39が図2において左方向に駆動されるときには、上述のように、押付シリンダ41により取付台67を介して駆動ボックス31は左方向に駆動される。
As shown in FIG. 6, the mounting
図10は押付シリンダ41に圧縮空気を供給するための空気圧回路であり、コンプレッサ等からなる空気圧供給源71と押付シリンダ41とを接続する配管72には、空気圧供給源71から吐出される圧縮空気の圧力を調整する圧力調整弁73と、押付シリンダ41に対して圧縮空気を供給する状態と供給を遮断する状態とに切り換えるための開閉弁74とが設けられている。このように、圧力調整弁73により設定されて、押付シリンダ41の加圧室に供給される圧力の圧縮空気により半導体ウェハーWの外周面に加えられる押付力が設定される。
FIG. 10 is an pneumatic circuit for supplying compressed air to the
(押付力の実荷重の測定)
図7~図9に示されるように、支持テーブル48にはブラケット75が固定されており、ロードセル76が実荷重測定器としてブラケット75に取り付けられている。一方、スライドプレート54に取り付けられたブラケット77には加圧ロッド78が装着されており、研磨パッド66に押付力が加えられると、その押付力は加圧ロッド78を介してロードセル76に伝達され、ロードセル76により押付力が検出される。ロードセル76は、上述のように、ブラケット75により支持テーブル48に取り付けられ、加圧ロッド78がブラケット77によりスライドプレート54に取り付けられているが、ロードセル76は支持テーブル48とスライドプレート54との間に配置されていれば、ロードセル76をスライドプレート54に取り付け、加圧ロッド78を支持テーブル48に取り付けるようにしてもよい。言い換えれば、ロードセル76は、支持テーブル48とスライドプレート54の一方に取り付けられる。
(Measurement of actual load of pressing force)
As shown in FIGS. 7 to 9, the
コラム17の側面には、ワークと研磨パッド66とにスラリー状の研磨液を塗布するための供給管79a、79bが取り付けられており、供給管79aは半導体ウェハーWの上側から研磨液を塗布し、供給管79bは下側から研磨液を塗布する。両方の供給管79a、79bの塗布口ノズルは、スペース26を向いており、相互に対向している。それぞれの供給管79a、79bは、図示しない配管により、外部の研磨液供給部に接続されている。
On the side surface of the
図11は研磨装置10の制御回路を示すブロック図であり、制御部81は制御プログラム、演算式、マップデータや一時的にデータを格納されるメモリと、制御信号を演算するマイクロプロセッサを有しており、上述した電動モータ33、38、51,65に対して制御信号を送る。操作盤82が制御部81に接続され研磨装置10の研磨作業の開始を指令する操作スイッチなどが操作盤82に設けられている。開閉弁74には制御部81から制御信号が送られ、開閉弁74がオンされると、押付シリンダ41に圧縮空気が供給される。押付シリンダ41により研磨パッド66に加えられる押付力はロードセル76により測定され、測定信号は制御部81に送られる。
FIG. 11 is a block diagram showing a control circuit of the polishing
(ノッチの研磨手順)
予め外周部にノッチVが加工された半導体ウェハーWは、チャック21に搭載されて保持される。そのときのワーク搭載位置は、図2に示される位置よりも右方向であり、ノッチVが2つの保持棒25の間のスペース26の中心部となるように、半導体ウェハーWは位置決めされてチャック21に搭載される。一方、電動モータ51により支持テーブル48が駆動されて、2つの研磨パッド66の一方がスペース26の位置に位置決めされる。この状態のもとで、電動モータ38が駆動されて、コラム17は図2および図6に示される研磨位置にまで搬送され、ノッチVは揺動中心軸Oの位置に位置決めされるとともに、スペース26の位置に位置決めされる。
(Notch polishing procedure)
The semiconductor wafer W having the notch V processed in advance on the outer peripheral portion is mounted on the
電動モータ38が駆動されると、コラム17は研磨ヘッド55に向けて駆動される。研磨パッド66がノッチVに入り込む位置までコラム17が駆動されたら、電動モータ38は停止される。次いで、開閉弁74がオンされて、押付シリンダ41によりコラム17、チャック21を介して押付力が研磨パッド66に加えられる。開閉弁74がオンし続ける時間は、制御部81に設けられたタイマーにより設定される。押付力はロードセル76により検出され、所定の押付力が加えられているか否かが確認される。
When the
この状態のもとで、電動モータ65が駆動されて研磨パッド66が回転駆動され、ノッチVが研磨加工される。この研磨加工時には電動モータ33が駆動されて、揺動アーム19により半導体ウェハーWはノッチVの部分を中心に、図6に示される水平位置の状態から矢印で示すように上下方向に角度θの範囲において揺動される。さらに、電動モータ51が駆動されて、研磨パッド66は僅かにY軸方向に往復動されてオシレーション駆動される。
Under this state, the
(押付力の測定原理の比較)
図12aは本発明の研磨パッドの押付力の測定原理を示す概略図であり、図12bは比較例としての研磨パッドの押付力の測定原理を示す概略図である。
(Comparison of pressing force measurement principle)
FIG. 12a is a schematic view showing the measurement principle of the pressing force of the polishing pad of the present invention, and FIG. 12b is a schematic view showing the measuring principle of the pressing force of the polishing pad as a comparative example.
図12aおよび図12bに示されるように、ベース部材13に往復動自在に装着された往復動台14はベース部材13から摺動抵抗R1を受けるとともに、コラム17と外部の固定部分との間に装着された配線・配管や、供給管79a、79bに接続された配管等からコラム17は配線配管抵抗R2を受ける。押付シリンダ41からはコラム17やチャック21等を含めて往復動台14を摺動するための押付力が往復動台14に加えられる。摺動抵抗R1と配線配管抵抗R2は、経時・経年変化が避けられない。
As shown in FIGS. 12a and 12b, the reciprocating table 14 reciprocally mounted on the
図12bに示す比較例のように、押付シリンダ41と往復動台14との間にロードセル76を装着して、押付シリンダ41により往復動台14に加えられる押付荷重により半導体ウェハーWに加えられる押付力を測定すると、測定値には、摺動抵抗R1と配線配管抵抗R2とを含めた押付力を測定することになる。このため、ロードセル76は押付シリンダ41の押付荷重が指令値通り出力されているかを監視することしかできず、ロードセル76の測定値は、経時・経年変化の影響を受けるので、半導体ウェハーWに加えられる実際の押付荷重ではない。
As in the comparative example shown in FIG. 12b, the
これに対して、図12aに示す本発明のように、研磨ヘッド55と支持テーブル48との間にロードセル76を配置すると、摺動抵抗R1および配線配管抵抗R2が変化したとしても、ロードセル76は実際に半導体ウェハーWに研磨パッド66から加えられる荷重を検出することができる。これにより、押付荷重の検出精度が高められ、半導体ウェハーWの外周面の研磨品質を長期間に渡って向上させることができる。スライドプレート54を支持テーブル48の上で長い距離移動させると、スライドプレート54は支持テーブル48に対する摺動抵抗や電動モータ65に接続された給電ケーブルの配管抵抗を受けるが、ロードセル76が荷重を検出するときには、スライドプレート54は押付荷重をロードセル76に伝達するだけ移動、つまり例えば1mm以下のミクロン単位の距離で移動するのみであり、ロードセル76の荷重測定値は、スライドプレート54の摺動抵抗や給電ケーブルの配管抵抗を受けることがない。
On the other hand, when the
さらに、ロードセル76により検出された押付荷重に基づいて、押付シリンダ41による半導体ウェハーWに対する押付荷重を変化させるように、押付シリンダ41に供給される圧縮空気の圧力をフィードバック制御することができる。この圧力は、図10に示した圧力調整弁73を制御することにより、自動的に制御することができるので、ロードセル76が設定された押付力を検出するように、押付シリンダ41に供給される圧縮空気の圧力を制御することにより、研磨パッド66の押付力を常に設定値に維持することができる。
Further, the pressure of the compressed air supplied to the
(オリエンテーションフラットの研磨)
研磨装置10は、図4bに示すように、半導体ウェハーWのフラットFの研磨加工も行うことができる。そのときには、ディスク上の研磨パッド66に代えて、円筒形状の研磨パッドが研磨ヘッド55に装着される。さらに、図5に示される保持棒25はフラット研磨用に交換される。フラット研磨用の保持棒25は、スペース26の寸法がノッチ研磨用と相違している。
(Polishing of orientation flat)
As shown in FIG. 4b, the polishing
本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。 The present invention is not limited to the above embodiment, and various modifications can be made without departing from the gist thereof.
10 研磨装置
11 チャック駆動ユニット
12 パッド駆動ユニット
13 ベース部材
14 往復動台
17 コラム
19 揺動アーム
21 チャック
26 スペース
31 駆動ボックス
41 押付シリンダ(押付力付与部材)
45 支持台
48 支持テーブル
54 スライドプレート
55 研磨ヘッド
66 研磨パッド
68 押し込み量測定器、
76 ロードセル(実荷重測定器)
10
45 Support stand 48 Support table 54
76 Load cell (actual load measuring instrument)
Claims (4)
ベース部材に往復動自在に装着され、前記コラムが取り付けられる往復動台と、
前記往復動台の往復動方向に対して直角方向の回転中心軸を有し前記半導体ウェハーの外周部を研磨する研磨パッドを、回転自在に支持する研磨ヘッドと、
前記研磨ヘッドが取り付けられるスライドプレートを、前記往復動台の移動方向と同一の方向に移動自在に支持する支持テーブルと、
前記ベース部材に装着され、前記往復動台を介して前記半導体ウェハーに前記研磨ヘッドに向かう押付力を与える押付力付与部材と、
前記支持テーブルと前記スライドプレートの一方に取り付けられ、前記押付力付与部材により前記研磨パッドと前記半導体ウェハーに加えられる実荷重を測定する実荷重測定器と、
を有する半導体ウェハーの研磨装置。 A column provided with a chuck for holding a semiconductor wafer,
A reciprocating table that is reciprocally mounted on the base member and to which the column is attached,
A polishing head that rotatably supports a polishing pad having a rotation center axis perpendicular to the reciprocating direction of the reciprocating table and polishing the outer peripheral portion of the semiconductor wafer.
A support table that movably supports the slide plate to which the polishing head is attached in the same direction as the moving table of the reciprocating table.
A pressing force applying member mounted on the base member and applying a pressing force toward the polishing head to the semiconductor wafer via the reciprocating table.
An actual load measuring device attached to one of the support table and the slide plate and measuring the actual load applied to the polishing pad and the semiconductor wafer by the pressing force applying member.
A semiconductor wafer polishing device with.
前記コラムは前記半導体ウェハーの外周部を揺動中心とする揺動アームを備え、前記チャックを前記揺動アームに設け、
揺動アームにより前記半導体ウェハーを研磨加工する外周部を中心に揺動させる、半導体ウェハーの研磨装置。 In the semiconductor wafer polishing apparatus according to claim 1,
The column is provided with a swing arm having an outer peripheral portion of the semiconductor wafer as a swing center, and the chuck is provided on the swing arm.
A semiconductor wafer polishing device that swings around the outer peripheral portion of the semiconductor wafer to be polished by a swing arm.
前記支持テーブルを前記回転中心軸に平行な方向に移動自在に支持する支持台と、
前記支持台に設けられ、前記支持テーブルにねじ結合された送りねじを駆動する送りモータと、を有し、
前記研磨ヘッドは、同一の回転中心軸の複数の研磨パッドを有し、
前記送りモータにより前記半導体ウェハーの研磨位置に、複数の研磨パッドのうちいずれかを位置決めする、半導体ウェハーの研磨装置。 In the semiconductor wafer polishing apparatus according to claim 1 or 2.
A support base that movably supports the support table in a direction parallel to the rotation center axis, and
It has a feed motor provided on the support base and for driving a feed screw screw-coupled to the support table.
The polishing head has a plurality of polishing pads of the same rotation center axis, and the polishing head has a plurality of polishing pads.
A semiconductor wafer polishing device that positions one of a plurality of polishing pads at a polishing position of the semiconductor wafer by the feed motor.
位置決め用の電動モータにより駆動されるブラケットに前記押付力付与部材を装着し、前記位置決め用の電動モータは、前記押付力付与部材を介して前記チャックを加工位置とワーク搭載位置との間で往復動する、半導体ウェハーの研磨装置。 The semiconductor wafer polishing apparatus according to any one of claims 1 to 3.
The pressing force applying member is attached to a bracket driven by a positioning electric motor, and the positioning electric motor reciprocates the chuck between a machining position and a work mounting position via the pressing force applying member. A moving semiconductor wafer polishing device.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021018878A JP7099757B1 (en) | 2021-02-09 | 2021-02-09 | Semiconductor wafer polishing equipment |
| CN202111327652.2A CN114905402A (en) | 2021-02-09 | 2021-11-10 | Grinding device for semiconductor wafer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021018878A JP7099757B1 (en) | 2021-02-09 | 2021-02-09 | Semiconductor wafer polishing equipment |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP7099757B1 true JP7099757B1 (en) | 2022-07-12 |
| JP2022121900A JP2022121900A (en) | 2022-08-22 |
Family
ID=82384793
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021018878A Active JP7099757B1 (en) | 2021-02-09 | 2021-02-09 | Semiconductor wafer polishing equipment |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7099757B1 (en) |
| CN (1) | CN114905402A (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005038978A (en) * | 2003-07-18 | 2005-02-10 | Speedfam Co Ltd | Outer periphery polishing device for flat surface of semiconductor wafer |
| JP2014150131A (en) * | 2013-01-31 | 2014-08-21 | Ebara Corp | Polishing device and polishing method |
| JP2017185612A (en) * | 2016-04-08 | 2017-10-12 | 株式会社荏原製作所 | Polishing device and polishing method |
-
2021
- 2021-02-09 JP JP2021018878A patent/JP7099757B1/en active Active
- 2021-11-10 CN CN202111327652.2A patent/CN114905402A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005038978A (en) * | 2003-07-18 | 2005-02-10 | Speedfam Co Ltd | Outer periphery polishing device for flat surface of semiconductor wafer |
| JP2014150131A (en) * | 2013-01-31 | 2014-08-21 | Ebara Corp | Polishing device and polishing method |
| JP2017185612A (en) * | 2016-04-08 | 2017-10-12 | 株式会社荏原製作所 | Polishing device and polishing method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022121900A (en) | 2022-08-22 |
| CN114905402A (en) | 2022-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100269964B1 (en) | Work piece position decision method and its apparatus | |
| KR20110036794A (en) | Grinding machine and measuring apparatus | |
| KR20180097136A (en) | Polishing apparatus and polishing method of substrate | |
| JP2018083266A (en) | Griding apparatus and roughness measuring method | |
| CN110842779A (en) | Origin position setting mechanism and origin position setting method for grinding device | |
| JP7099757B1 (en) | Semiconductor wafer polishing equipment | |
| JP2008023674A (en) | Dressing device adjustment method, dressing device and polishing device | |
| JP2022041491A (en) | Wafer grinding method | |
| KR20200101836A (en) | Grinding apparatus | |
| US20170225288A1 (en) | Grinding tool | |
| US9855638B2 (en) | Dressing apparatus, polishing apparatus having the dressing apparatus, and polishing method | |
| JP7274998B2 (en) | Grinding equipment | |
| JP2017164823A (en) | Grinding device | |
| KR101207118B1 (en) | Supersonic machine | |
| TW202133999A (en) | Fine adjustment thread assembly and processing apapratus | |
| JP2024086741A (en) | Thickness measuring device of polishing pad | |
| US11342233B2 (en) | Wafer polishing method | |
| TWI526278B (en) | Fiber head grinding device | |
| JP2002313765A (en) | Brush cleaning device and control method therefor | |
| JP2008114329A (en) | Apparatus and method for polishing | |
| US2411052A (en) | Grinding apparatus | |
| JP7248339B1 (en) | Polishing equipment | |
| JP2002144226A (en) | Grinding device | |
| TWM469146U (en) | Optic fiber end grinding device | |
| JP2006205304A (en) | Grinding method and grinding attachment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220405 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220516 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220531 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220623 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7099757 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |