JP7099514B2 - Scanning optical system and rider - Google Patents
Scanning optical system and rider Download PDFInfo
- Publication number
- JP7099514B2 JP7099514B2 JP2020502019A JP2020502019A JP7099514B2 JP 7099514 B2 JP7099514 B2 JP 7099514B2 JP 2020502019 A JP2020502019 A JP 2020502019A JP 2020502019 A JP2020502019 A JP 2020502019A JP 7099514 B2 JP7099514 B2 JP 7099514B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- mirror
- scanning
- lens
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims description 126
- 239000000463 material Substances 0.000 claims description 36
- 230000004907 flux Effects 0.000 claims description 24
- 238000005259 measurement Methods 0.000 claims description 22
- 239000004065 semiconductor Substances 0.000 description 67
- 238000010586 diagram Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 239000012141 concentrate Substances 0.000 description 2
- 239000004417 polycarbonate Substances 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011410 subtraction method Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/12—Scanning systems using multifaceted mirrors
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Mechanical Optical Scanning Systems (AREA)
Description
本発明は、走査型光学系、およびライダーに関し、詳しくは、光を走査するための走査型光学系とこれを用いたライダーに関する。 The present invention relates to a scanning optical system and a lidar, and more particularly to a scanning optical system for scanning light and a rider using the scanning optical system.
走査型光学系は、レーザー光源からのレーザー光を走査ミラーに反射させて2次元的に走査しつつ投光させる投光系と、走査範囲内に存在する物体から戻ってきた反射光をフォトダイオードなどで受光させる受光系とを備える。 The scanning optical system is a projection system that reflects the laser light from the laser light source on the scanning mirror and projects it while scanning it two-dimensionally, and a photodiode that reflects the reflected light returned from an object existing within the scanning range. It is equipped with a light receiving system that receives light from such as.
ライダーは、レーザーレーダーとも称されており、このような走査型光学系を用いて測定空間へ向けてレーザー光を走査、投光し、投光からフォトダイオードが反射光を受光するまでの時間差により距離を求めている。 The lidar is also called a laser radar, and the laser beam is scanned and projected toward the measurement space using such a scanning optical system, and the time difference between the projection and the light receiving the reflected light by the photodiode is used. Seeking distance.
従来の走査型光学系においては、複数のレーザー光源のレーザー光をまとめることでハイパワー化する技術がある(特開2005-292156号公報)。また、複数のレーザー光源からの出力を同軸化させるミラーを用いて一点に集めることで、シグナル対ノイズ(SN)を向上させ、また装置を小型化させるなどの効果を得る技術がある(特開2004-170965号公報)。 In the conventional scanning optical system, there is a technique for increasing the power by combining the laser beams of a plurality of laser light sources (Japanese Patent Laid-Open No. 2005-292156). In addition, there is a technique for improving signal vs. noise (SN) and reducing the size of the device by collecting the outputs from a plurality of laser light sources at one point using a mirror that coaxializes the outputs (Japanese Patent Laid-Open No. 2004-170965).
しかしながら、従来の技術は、複数の光源を用いた際に、同軸化させるミラーの位置が定まっておらず、複数のレーザー光源の同軸化を図った際に投光されるレーザー光に損失が発生してしまうという問題があった。 However, in the conventional technique, when a plurality of light sources are used, the position of the mirror to be coaxialized is not fixed, and a loss occurs in the laser beam emitted when the plurality of laser light sources are coaxialized. There was a problem of doing it.
本発明は、上記事情に鑑みなされたものであり、本発明の目的は、複数のレーザー光源からのレーザー光を同軸化した際にレーザー光の損失を少なくすることができる走査型光学系を提供することである。 The present invention has been made in view of the above circumstances, and an object of the present invention is to provide a scanning optical system capable of reducing the loss of laser light when laser light from a plurality of laser light sources is coaxialized. It is to be.
また、本発明の他の目的は、複数のレーザー光源からのレーザー光を同軸化した際にレーザー光の損失を少なくすることができる走査型光学系を用いたライダーを提供することである。 Another object of the present invention is to provide a lidar using a scanning optical system capable of reducing the loss of laser light when laser light from a plurality of laser light sources is coaxialized.
本発明の上記目的は、下記の手段によって達成される。 The above object of the present invention is achieved by the following means.
(1)複数の光源、および複数の前記光源からの光をそれぞれ入射させる複数の投光レンズ、を有する投光系と、
前記投光系から投光された光を反射させて測定空間へ向けて走査、投光し、物体に反射して戻ってきた戻り光を反射させる走査ミラーと、
光を受光する受光素子、および前記走査ミラーで反射してきた前記戻り光を前記受光素子に集光させる集光光学素子を有する受光系と、
反射材の存在しない領域、および該反射材が存在しない領域を囲む反射材の形成されている領域を有する第1主面が、前記走査ミラーを向いて配置され、前記投光系から投光された光を前記反射材が存在しない領域を経由して前記走査ミラーの方向へ通し、前記走査ミラーからの前記戻り光を前記反射材で前記受光系の方向へ反射させる同軸化ミラーと、
を有し、
前記光源の出射面から前記同軸化ミラーの第1主面までの距離をMLとした場合に、下記(1)式を満たすように前記同軸化ミラーを配置する、走査型光学系。(1) A floodlight system having a plurality of light sources and a plurality of floodlight lenses for incident light from the plurality of light sources, respectively.
A scanning mirror that reflects the light projected from the projection system, scans and projects it toward the measurement space, reflects it on an object, and reflects the returned light.
A light receiving element having a light receiving element that receives light, and a light receiving optical element that condenses the return light reflected by the scanning mirror on the light receiving element, and a light receiving system.
A first main surface having a region in which the reflective material does not exist and a region in which the reflective material is formed surrounding the region in which the reflective material does not exist is arranged facing the scanning mirror and is projected from the projection system. A coaxialized mirror that allows the light to pass through the region where the reflecting material does not exist in the direction of the scanning mirror, and reflects the return light from the scanning mirror in the direction of the light receiving system by the reflecting material.
Have,
A scanning optical system in which the coaxial mirror is arranged so as to satisfy the following equation (1) when the distance from the emission surface of the light source to the first main surface of the coaxial mirror is ML.
f+h/tanθ≦ML≦f+h/tanθ+2L/tanθ …(1)
ただし、(1)式中、hは前記投光レンズの光学中心からレンズ外周方向への距離、fは前記投光レンズの焦点距離、Lは前記投光レンズの光学中心から複数の前記光源の光を同軸化した後の光束の投光光軸までの距離、θは前記光源から出射された光の方向を前記投光レンズにより前記投光光軸方向へ向けるために前記投光光軸に対して傾ける角度である。f + h / tanθ ≤ ML ≤ f + h / tanθ + 2L / tanθ ... (1)
However, in the equation (1), h is the distance from the optical center of the floodlight lens toward the outer periphery of the lens, f is the focal distance of the floodlight lens, and L is the distance from the optical center of the floodlight lens to the plurality of the light sources. The distance of the light beam to the projection light axis after the light is coaxialized, θ is the projection axis in order to direct the direction of the light emitted from the light source toward the projection light axis by the projection lens. It is the angle to tilt.
(2)複数の前記光源は、各前記光源の光軸がそれぞれの前記投光レンズの光学中心から、前記投光光軸から離れる方向にずらして配置されている、上記(1)に記載の走査型光学系。 (2) The plurality of light sources according to (1) above, wherein the optical axes of the light sources are arranged so as to be offset from the optical center of the respective light projectors in a direction away from the light projector axes. Scanning optical system.
(3)前記走査ミラーが光を走査する方向を主走査方向、主走査方向に直交する方向を副走査方向として、
前記同軸化ミラーの前記反射材の存在しない領域の副走査方向の大きさは、前記集光光学素子の有効径より小さく、前記投光レンズの光学中心から複数の前記光源の光を同軸化した後の光束の投光光軸までの距離Lより大きい、上記(1)または(2)に記載の走査型光学系。(3) The direction in which the scanning mirror scans light is set as the main scanning direction, and the direction orthogonal to the main scanning direction is set as the sub-scanning direction.
The size of the area of the coaxialized mirror in the sub-scanning direction in which the reflective material does not exist is smaller than the effective diameter of the condensing optical element, and the light of the plurality of light sources is coaxialized from the optical center of the projectile lens. The scanning optical system according to (1) or (2) above, wherein the distance L of the later light beam to the light projection axis is larger.
(4)前記受光素子は、副走査方向に沿う方向に複数配置され、複数の前記光源から出射される光は、複数の前記受光素子に対応するように副走査方向に沿う方向に長いスポット光束となるように投光される、上記(3)に記載の走査型光学系。 (4) A plurality of the light receiving elements are arranged in the direction along the sub-scanning direction, and the light emitted from the plurality of light sources is a long spot luminous flux in the direction along the sub-scanning direction so as to correspond to the plurality of the light receiving elements. The scanning optical system according to (3) above, which is projected so as to be.
(5)前記光源の出射面は、主走査方向より副走査方向に長い、上記(3)または(4)に記載の走査型光学系。 (5) The scanning optical system according to (3) or (4) above, wherein the emission surface of the light source is longer in the sub-scanning direction than in the main scanning direction.
(6)複数の前記投光レンズのうち、少なくとも一つは、前記光源から入射された光を投光するために必要な部分を残すように切り取ったダイシングレンズである、上記(1)~(5)のいずれか1つに記載の走査型光学系。 (6) Of the plurality of the projection lenses, at least one is a dicing lens cut out so as to leave a portion necessary for projecting the light incident from the light source. The scanning optical system according to any one of 5).
(7)複数の前記光源は、2つである、上記(1)~(6)のいずれか1つに記載の走査型光学系。 (7) The scanning optical system according to any one of (1) to (6) above, wherein the plurality of light sources are two.
(8)複数の前記光源のうち、少なくとも一つは、出射された光の光路が光路変更素子により、前記同軸化ミラーの方向へ変えられる、上記(1)~(7)のいずれか1つに記載の走査型光学系。 (8) At least one of the plurality of light sources is any one of (1) to (7) above, wherein the optical path of the emitted light is changed in the direction of the coaxial mirror by an optical path changing element. The scanning optical system described in 1.
(9)前記受光素子は、副走査方向に2画素分以上となるように複数を有する、上記(1)~(8)のいずれか1つに記載の走査型光学系。 (9) The scanning optical system according to any one of (1) to (8) above, wherein the light receiving element has a plurality of light receiving elements so as to have two or more pixels in the sub-scanning direction.
(10)前記同軸化ミラーの前記反射材の存在しない領域は、開口部である、上記(1)~(9)のいずれか1つに記載の走査型光学系。 (10) The scanning optical system according to any one of (1) to (9) above, wherein the region of the coaxial mirror in which the reflective material does not exist is an opening.
(11)上記(1)~(10)のいずれか1つに記載の走査型光学系を備え、
光源からの光の出射タイミングと、受光素子による光の受光タイミングに基づいて、光源が配置されている位置から物体までの距離を測定する、ライダー。(11) The scanning optical system according to any one of (1) to (10) above is provided.
A rider that measures the distance from the position where the light source is placed to the object based on the timing of light emission from the light source and the timing of light reception by the light receiving element.
以下、図面を参照して、本発明の実施形態を詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。また、図面の寸法比率は、説明の都合上誇張されており、実際の比率とは異なる場合がある。 Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In the description of the drawings, the same elements are designated by the same reference numerals, and duplicate description will be omitted. In addition, the dimensional ratios in the drawings are exaggerated for convenience of explanation and may differ from the actual ratios.
本実施形態の走査型光学系は、ポリゴンミラーにレーザー光を反射させて測定空間内を2次元的に走査する一方、物体などからの反射光を再びポリゴンミラーに反射させてフォトダイオードへ導く。これにより、測定空間を向いた複数の方向に関する情報を得ることができる。ライダーはこの走査型光学系により走査されたレーザー光が発射されてからフォトダイオードが受光するまでの時間から距離を求めて、得られた距離は距離画像と称し、ライダーの設置位置から見た物体の方向と、その物体までの距離という3次元情報を取得する。 In the scanning optical system of the present embodiment, the laser beam is reflected by the polygon mirror to scan the inside of the measurement space two-dimensionally, while the reflected light from an object or the like is reflected by the polygon mirror again and guided to the photodiode. This makes it possible to obtain information regarding a plurality of directions facing the measurement space. The rider obtains the distance from the time from when the laser beam scanned by this scanning optical system is emitted until the photodiode receives light, and the obtained distance is called a distance image, which is an object seen from the rider's installation position. 3D information such as the direction of and the distance to the object is acquired.
(ライダーの構成)
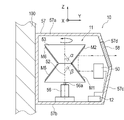
図1は、本実施形態に係るライダーを示す断面図である。(Rider composition)
FIG. 1 is a cross-sectional view showing a rider according to the present embodiment.
ライダー10は、投受光ユニット11、および制御部12を備え、筐体57に収容されている。
The
投受光ユニット11は走査型光学系であり、詳細は後述する。
The light emitting / receiving
制御部12は、投光系501(後述)からのレーザー光の出射から受光系505(後述)による受光までの時間差に応じて距離を求める。得られた距離から、測定空間内の物体までの距離値の分布を示す複数の画素で構成される距離画像が生成される。距離画像は測距点群データまたは距離マップとも称される。
The
制御部12は、コンピューターであり、距離の算出、レーザー光の発光タイミング、ポリゴンミラー53の回転などの制御などを行っている。このような制御部12は、たとえば、FPGA(Field-Programmable Gate Array)やASIC(Application Specific Integrated Circuit)などの回路によって構成されていてもよい。
The
ボックス状の筐体57は、車両や構造物など100の一部に取り付けられる。ライダーを取り付ける位置は、ライダーの利用形態によって異なる。筐体57は、上壁57aと、これに対向する下壁57bと、上壁57aと下壁57bとを連結する側壁57cとを有する。側壁57cの一部に開口57dが形成され、開口57dには透明板58が取り付けられている。
The box-shaped
(投受光ユニット)
投受光ユニット11を説明する。図2は投受光ユニットを示す斜視図である。図3は投光系部分の平面図であり、図4は図3中の矢印Aで示す方向から見た投光系部分の側面図である。(Light receiving / receiving unit)
The light emitting / receiving
投受光ユニット11は、ポリゴンミラー53と投受光部50を有する。投受光部50は、投光系501、同軸化ミラー503、および受光系505を有する。
The light emitting / receiving
(ポリゴンミラー)
ポリゴンミラー53は走査ミラーである。ポリゴンミラー53は、少なくとも1つのミラー面を有する。本実施形態では8面のミラー面を有している。ポリゴンミラー53は、投光系501からのレーザー光を、回転するミラー面により測定空間に向かって走査投光させると共に、物体からの反射光を反射させる。ポリゴンミラー53で反射された物体からの反射光(戻り光ともいう)は受光系505により受光される。(Polygon mirror)
The
ポリゴンミラー53は、図1に示したように、筐体57に固定されたモーター56のモーター軸56aに連結され、モーター56の回転によって回転する。本実施形態では、たとえば、モーター軸56aの軸線(回転軸線)が鉛直方向であるZ方向に延在しており、Z方向に直交するX方向およびY方向によりなすXY平面が水平面となっているが、モーター軸56aの軸線を鉛直方向に対して傾けても良い。
As shown in FIG. 1, the
ポリゴンミラー53は、2つの四角錐を逆向きに接合して一体化した形状を有している。したがって、対になって向き合う方向に傾いたミラー面を4対有している。一対のミラー面としては、第1ミラー面M1と第2ミラー面M2、第3ミラー面M3と第4ミラー面M4、第5ミラー面M5と第6ミラー面M6、第7ミラー面M7と第8ミラー面M8である(各ミラー面M1~8のうち一部は図示されない)。
The
第1ミラー面M1、第3ミラー面M3、第5ミラー面M5、第7ミラー面M7は、図1に示したように、互いにポリゴンミラー回転軸52に対する傾斜角αが異なる。同様に第2ミラー面M2、第4ミラー面M4、第6ミラー面M6、第8ミラー面M8は、互いにポリゴンミラー回転軸52に対する傾斜角βが異なる。傾斜角は各ミラー面の延長線と、この延長線がポリゴンミラー回転軸52と交わる部分のなす角αおよびβである。図1においては、第1ミラー面M1の傾斜角αと第2ミラー面M2の傾斜角βを示したが、他のミラー面においても同様である(ただし傾斜角そのものは既に説明したとおりミラー面ごとに異なる)。なお、各ミラー面を総称または区別しないで記す場合はミラー面Mとする。
As shown in FIG. 1, the first mirror surface M1, the third mirror surface M3, the fifth mirror surface M5, and the seventh mirror surface M7 have different inclination angles α with respect to the polygon
各ミラー面Mは、ポリゴンミラー53の形状をした樹脂素材(たとえばPC(ポリカーボネート))の表面に、反射膜を蒸着することにより形成されている。
Each mirror surface M is formed by depositing a reflective film on the surface of a resin material (for example, PC (polycarbonate)) in the shape of a
ライダーにおいては、ポリゴンミラー53の回転によりレーザー光が走査される方向を主走査方向とし、主走査方向に直交する方向を副走査方向とする。
In the rider, the direction in which the laser beam is scanned by the rotation of the
(同軸化ミラー)
図3では、後述する同軸化した後のレーザー光束の投光光軸Lsとし、投光されたレーザー光束が物体から反射してポリゴンミラー53を経て受光系505に入射される戻り光の光軸Lrとする。同軸化ミラー503は投光光軸Lsと戻り光の光軸Lrとを一致させる。このように投光系501と受光系505の光軸を一致させるミラーは、完全同軸化ミラーと称されることもある。(Coaxial mirror)
In FIG. 3, the projected light axis Ls of the laser light beam after coaxialization, which will be described later, is used, and the projected laser light beam is reflected from the object and is incident on the
(同軸化ミラーの第1例)
ここで同軸化ミラーについて2通りの例を説明する。第1例は、図3に示した同軸化ミラー503である。(First example of coaxial mirror)
Here, two examples of the coaxial mirror will be described. The first example is the
同軸化ミラー503は、図3に示したとおり、透明な基材533、たとえば、ガラスや樹脂などの基材533の第1主面531に、レーザー光を反射する反射材534が形成されている。第1主面531は、ポリゴンミラー53および受光系505の方を向いた面である。投光系501を向いた面が第2主面541である。
As shown in FIG. 3, in the
この同軸化ミラー503は、その一部に開口部532が設けられていて、この開口部532から投光系501からのレーザー光を通過させる。当然開口部532に反射材は存在しない。開口部532の大きさは、図4に示すように、本実施形態では、縦方向haと横方向hbの矩形状である。縦方向haは副走査方向であり、同軸化する2本のレーザー光が並ぶ方向である。開口部532に大きさについては後述する。
The
この開口部532を囲むように反射材534が形成されている。そして同軸化ミラー503は、反射材534により、ポリゴンミラー53から反射されてきた戻り光(図3のLr)を受光系505の方向へ反射させる。
A
このように、同軸化ミラー503の第1例では開口部532を有することで、投光系501からのレーザー光をポリゴンミラー53の方向へ通過させると共に、ポリゴンミラー53から反射されてきた戻り光を受光系505の方向へ反射させる。同軸化ミラー503の位置は、投光系501からのレーザー光を開口部532から通過させ、戻り光を受光系505の方向へ反射させるように調整される。
As described above, in the first example of the
(同軸化ミラーの第2例)
図5は、同軸化ミラーの第2例を説明するための説明図であり、図3同様に、投光系501部分の平面図である。図6は、同軸化ミラーの第2例を第1主面側から見た側面図である。(Second example of coaxial mirror)
FIG. 5 is an explanatory diagram for explaining a second example of the coaxialized mirror, and is a plan view of the
同軸化ミラーの第2例5032は、図5(a)に示すように、第1例同様に、透明な基材533の第1主面531に、レーザー光を反射する反射材534が形成されている。同軸化ミラーの第2例5032の配置は、図3同様に、第1主面531がポリゴンミラー53および受光系505の方を向いている。
In the second example 5032 of the coaxialized mirror, as shown in FIG. 5A, a
この同軸化ミラーの第2例5032は、開口部はなく、一部に反射材534が存在しない領域として光透過部535がある。光透過部535を囲むように反射材534が形成されている。この同軸化ミラーの第2例5032は、投光系501からのレーザー光を、この光透過部535をポリゴンミラー53の方向へ透過させる。
The second example 5032 of this coaxialized mirror has no opening and has a
図5においては、図5(a)の下に、図5(b)として同軸化ミラー503の第1例を示している。図5(a)に示した同軸化ミラーの第2例5032と図5(b)に示した同軸化ミラー503の第1例は、それぞれを透過または通過する投光系501の光軸Lsが同じになるように示している。
In FIG. 5, a first example of the
図5(a)および(b)を参照して、同軸化ミラーの第2例5032で光が透過する幅をW2、同軸化ミラー503の第1例で光が通過する幅をW1とする。これら幅W1とW2の差がΔWであり、同軸化ミラーの第2例5032の方が第1例より光を透過させることのできる領域の幅が広いことがわかる。
With reference to FIGS. 5A and 5B, the width through which light passes in the second example 5032 of the coaxial mirror is W2, and the width through which light passes in the first example of the
このため、同軸化ミラーの第2例5032は、透明な基材533の一部に反射材534を形成しない光透過部535を設けることで、第1例のような開口部532を設ける場合と比べて、反射材534の面積、形状は同じにして、より多くの光を透過させることができる。逆に言えば、光を透過させる幅が同じでよければ、反射材のある面積を多くすることができるため、より多くの戻り光を受光系505へ反射することができるようになる。
Therefore, in the second example 5032 of the coaxialized mirror, the
同軸化ミラーの第2例5032においても、その他の構成や配置などは、同軸化ミラー503の第1例と同じであるので説明は省略する。
In the second example 5032 of the coaxial mirror, other configurations and arrangements are the same as those of the first example of the
なお、以下の説明においては、同軸化ミラー503の第1例を用いた形態により説明するが、同軸化ミラーの第2例5032を用いた場合も同様である。
In the following description, the first example of the
(投光系)
図2~4を参照して、投光系501は、ポリゴンミラー53へ向けてレーザー光を出射する複数の半導体レーザー(第1半導体レーザー511、第2半導体レーザー521)と、それらに対応した複数の投光レンズ(第1レンズ512、第2レンズ522)と、第1半導体レーザー511からのレーザー光を同軸化ミラー503の方向へ反射させるプリズムミラー513を有する。(Light projection system)
With reference to FIGS. 2 to 4, the
第1半導体レーザー511および第2半導体レーザー521は、共にレーザー光源であり、パルス状のレーザー光を出射する。本実施形態では、出射面の形状が主走査方向(水平方向)より副走査方向(垂直方向)に長い。これにより、本実施形態では、2つの光源を用いて投光するスポット光束の形状(後述のスポット光束600)を副走査方向に広くすることが容易になっている。また、本実施形態では、ライダー10の設置として、主走査方向は水平方向となるようにしており、これは画面の横方向となる。一方、副走査方向は垂直方向となる。
Both the
投光レンズである第1レンズ512および第2レンズ522は、それぞれの半導体レーザーからの拡散光を平行光にするコリメーターレンズである。
The
第1レンズ512は、本実施形態では、ダイシングレンズを使用している。ダイシングレンズは、光を平行光とするために必要となる部分だけを切り取って使用するものである。
In this embodiment, the
図7は、ダイシングレンズを説明するための説明図である。図7(a)は参考例を示し、図7(b)および(c)は本実施形態を示す。 FIG. 7 is an explanatory diagram for explaining the dicing lens. 7 (a) shows a reference example, and FIGS. 7 (b) and 7 (c) show the present embodiment.
レンズは、多くの場合、図7(a)に示すように、半導体レーザー901の光軸上を通る光Lx0とレンズ902の光学中心Oとが一致するように使用される。
The lens is often used so that the light Lx0 passing on the optical axis of the
半導体レーザー901からのレーザー光にはある程度の幅ある。このため半導体レーザー901の中央部からの光Lx1およびLx2はレンズ902を通ることで、光軸上の光Lx0と平行に投光される(画角0度の光となる)。
The laser light from the
一方、半導体レーザー901の一方の端から出た光Lx11、Lx12、およびLx13と光Lx21、Lx22、およびLx23は、レンズ902を通ることで、互いに交差するように、光軸上の光Lx0に対して傾いた方向へ出射されるようになる(画角0度以外の光となる)。
On the other hand, the light Lx11, Lx12, and Lx13 and the light Lx21, Lx22, and Lx23 emitted from one end of the
なお、レンズの光学中心Oとは、レンズの光学的な中心であり、レンズの実態的な形における直径の中心ではない。したがって、レンズの直径方向の形状が変わってもレンズの光学中心は変わらない。 The optical center O of the lens is the optical center of the lens, not the center of the diameter in the actual shape of the lens. Therefore, the optical center of the lens does not change even if the shape in the radial direction of the lens changes.
本実施形態では、図7(b)に示すように、第1レンズ512に対する第1半導体レーザー511の位置を、第1レンズ512の光学中心Oからずれた位置に配置している。このような配置を軸はずしと称している。これにより第1半導体レーザー511からの光のうち、第1半導体レーザー511の端から出ている光La1は、第1レンズ512の光学中心Oを通り、第1レンズ512の面に対して垂直な方向へ投光される。第1レンズ512の光学中心Oからずれている光La0と光La2は、第1レンズ512の面に垂直な方向に対して傾いた方向へ投光される。この傾きが後述する副走査方向視野角θとなるものであり、一般的に、レンズの光学中心Oに対して半導体レーザーの位置をどれだけずらすか(軸をはずす距離)によって変化する。つまり、レンズの光学中心Oに対する半導体レーザーの光軸のずれが大きいほど傾きが大きくなる。
In the present embodiment, as shown in FIG. 7B, the position of the
そして、このような軸はずしの配置においてレンズの使用される部分は、光が通過する部分だけである。本実施形態では、第1レンズ512の光学中心Oから図示する下半分だけを使用している。
The portion of the lens used in such an off-axis arrangement is only the portion through which light passes. In this embodiment, only the lower half shown from the optical center O of the
このため本実施形態では、第1レンズ512を、図7(c)に示すように、必要な部分だけを切り取った(不要な部分を切り落とした)ダイシングレンズとした。このようなダイシングレンズを使用することで、装置構成を小型軽量化することができる。
Therefore, in the present embodiment, the
本実施形態では、このダイシングレンズを用いたことで、図2~図4に示したように、プリズムミラー513の直下に第2レンズ522を配置することができている。これにより、2つのレーザー光源(第1半導体レーザー511および第2半導体レーザー521)からのレーザー光L1およびL2(図3参照)を同軸化する際に、2つのレーザー光の光軸を、ダイシングレンズを用いない場合と比較して近接させることができる。同軸化する際には、2つのレーザー光の光軸をできるだけ近接させることで、レーザー光の同軸化の精度が高くなり、また、同軸化ミラー503の開口部532(または光透過部535、以下同様)をより小さくすることができる。開口部532を少しでも小さくできれば、受光のために反射材534を形成する領域をより広くすることが可能になる。
In the present embodiment, by using this dicing lens, the
一方、第2レンズ522は、通常のレンズ形状のまま使用している。しかし、小型化、軽量化のために、第2レンズ522もダイシングレンズとしてもよい。
On the other hand, the
なお、ここでは第1レンズ512をダイシングレンズとしたが、本発明は、このようなレンズ形態に限定されず、図7(b)に示したように、第1レンズ512についても、ダイシングしないレンズを使用してもよい。
Although the
図2~図4を参照して、プリズムミラー513は光路変更素子である。プリズムミラー513は周知のように、プリズムの斜面に反射材534が形成してあり反射面となっていて、ここに光を当てて光路を変える。本実施形態では、第2半導体レーザー521からのレーザー光L2が同軸化ミラー503の開口部532方向に出射されていない。このため、プリズムミラー513を用いて、第2半導体レーザー521からのレーザー光L2の光路を同軸化ミラー503の開口部532の方向に変えている。このようにプリズムミラー513を用いることで、レーザー光源を配置する際の設計自由度が高くなり、また装置の小型化にも寄与する。なお、光路変更素子は、プリズムミラー513に限定されず、基材に反射材を形成したミラーを用いてもよい。
With reference to FIGS. 2 to 4, the
(同軸化)
同軸化について説明する。(Coaxial)
Coaxialization will be described.
図8は、同軸化を説明するための説明図である。ここでは、第1レンズ512および第2レンズ522ともに、説明をわかりやすくするために通常のレンズ形状として示している。実際に使用するレンズは、既に説明したようにダイシングレンズとしてもよい。また、プリズムミラーも省略している。
FIG. 8 is an explanatory diagram for explaining coaxialization. Here, both the
本実施形態では、図8に示すように、同軸化した後のレーザー光束の中心を投光光軸Lsとする。 In the present embodiment, as shown in FIG. 8, the center of the laser light flux after coaxialization is defined as the light projection axis Ls.
第1半導体レーザー511および第2半導体レーザー521は、それぞれ第1レンズ512および第2レンズ522に対して、軸はずしで配置されている。第1半導体レーザー511および第2半導体レーザー521は、共にそれぞれのレンズ512および522の光学中心Oからレンズ外周方向への距離h(光軸からの高さとなる)が、主走査方向よりも副走査方向に長い。この出射面の径hは、投光された光の像の高さ(像高)を決めるものとなり、光軸の高さhという(光源高さとも称されている)。光軸の高さhはレンズの光学中心から離れるほど高くなり(図8中の矢印hの矢の方向へ行くほど光軸の高さが高い)、それによって投光される光の像高も高くなる。
The
第1半導体レーザー511からの光の内、第1レンズ512の光学中心Oを通る光La1は投光光軸Lsとほぼ平行となる。一方、第1半導体レーザー511の光軸と一致する光La0および第1半導体レーザー511の端で光軸の高さhが高い位置からの光La2は、第1レンズ512の光学中心Oから離れた位置を通る。このため、図示するように、光La0およびLa2は投光光軸Lsの方向へ曲げられ、その後広がって行く。このとき、第1半導体レーザー511からの光を投光光軸Lsの方向へ傾ける角度をθとする。このθは、投光される光の像の副走査方向の大きさを決めることになるため、副走査方向視野角θという。角度θそのものは、投光レンズによって最も大きく曲がる光と、投光光軸Lsとの角度とする。本実施形態では、第1半導体レーザー511からの光のうち第1レンズ512の端を通る光La2と投光光軸Lsと平行な方向(La1と同じ方向)とのなす角を、副走査方向視野角θとしている。
Of the light from the
同様に、第2半導体レーザー521からのレーザー光の内、第2レンズ522の光学中心Oを通る光Lb1は投光光軸Lsと平行となり、第2レンズ522の光学中心Oから離れた位置を通る光Lb0およびLb2は投光光軸Lsの方向へ曲げられ、その後広がって行く。第2半導体レーザー521からの光のうち第2レンズ522の端を通る光Lb2と投光光軸Lsと平行な方向(Lb1と同じ方向)とのなす角を、副走査方向視野角θとしている。
Similarly, among the laser light from the
これらにより、第1半導体レーザー511および第2半導体レーザー521から出力される拡散光が同軸化された平行光となってポリゴンミラー53方向へ投光される。
As a result, the diffused light output from the
この同軸化された光は、同軸化ミラー503の第2主面541側から反射材の存在しない第1主面531の開口部532を通って、ポリゴンミラー53の方向へ投光される。この同軸化ミラー503の位置と、同軸化された光の幅が適切な大きさにならないと、光の一部が開口部532を通らずに遮られて(ケラレという)、複数のレーザー光を同軸化したにもかかわらず、レーザー光の強度が、期待したほど大きくならない。
The coaxialized light is projected from the second
そこで、本実施形態では、複数のレーザー光の光強度を効果的に強くするために、各半導体レーザー511および521からのレーザー光と同軸化ミラー503との位置関係を最適化した。
Therefore, in the present embodiment, the positional relationship between the laser light from each of the
この最適化のためには、光源の出射面(原点0)から同軸化ミラー503の第1主面531までの距離をMLとした場合に、下記(1)式を満たすように同軸化ミラー503を配置する。
For this optimization, when the distance from the emission surface (origin 0) of the light source to the first
f+h/tanθ≦ML≦f+h/tanθ+2L/tanθ …(1)
ただし、(1)式中、hはレーザー光源の出射面における光の径、fは投光レンズの焦点距離、Lは投光レンズの光学中心Oから複数のレーザー光源の光を同軸化した後の光束の投光光軸Lsまでの距離(レンズ中心-投光光軸間距離Lという)、θは光源から出射された光の方向を投光レンズにより投光光軸Ls方向へ向けるために投光光軸Lsに対して傾ける角度である。f + h / tanθ ≤ ML ≤ f + h / tanθ + 2L / tanθ ... (1)
However, in the equation (1), h is the diameter of the light on the emission surface of the laser light source, f is the focal distance of the floodlight lens, and L is the optical center O of the floodlight lens after coaxializing the light of a plurality of laser light sources. The distance of the light beam to the projection light axis Ls (referred to as the distance L between the lens center and the projection light axis), θ is for directing the direction of the light emitted from the light source toward the projection light axis Ls by the projection lens. It is an angle tilted with respect to the floodlight axis Ls.
なお、ここでは、レーザー光源の出射面における光の径h、レンズの焦点距離f、レンズ中心-投光光軸間距離L、および副走査方向視野角θは、第1半導体レーザー511および第1レンズ512と、第2半導体レーザー521および第2レンズ522とで共に同じとする。また、原点0は、第2半導体レーザー521の出射面とする。原点の詳細は後述する。
Here, the diameter h of light on the emission surface of the laser light source, the focal distance f of the lens, the distance L between the center of the lens and the light beam projection axis, and the viewing angle θ in the sub-scanning direction are the
この式(1)を満たすことによる作用を説明する。図9は、本実施形態の作用を説明するための説明図である。図9においては、レーザー光はパルス出力されるため、これを模式的に示した。 The action of satisfying this equation (1) will be described. FIG. 9 is an explanatory diagram for explaining the operation of the present embodiment. In FIG. 9, since the laser beam is output as a pulse, this is schematically shown.
図9に示すように、第1半導体レーザー511からのレーザー光は第1レンズ512を透過して投光される。このとき、レンズの光学中心Oを通る(光軸の高さの低い位置の)光La1は、投光光軸Lsに沿って投光される。そしてこの光La1は、レンズに近い位置では同軸化される光束のほぼ外周を通って投光されて行く。一方、レンズの光学中心Oを通らない(光軸の高さの高い位置)光La0およびLa2は、投光光軸Lsに向かって出射され、投光光軸Lsを交差し、その後、さらに広がるように投光されて行く。第2半導体レーザー521からの光Lb0、Lb1およびLb2も光の曲げられる方向が逆であるが同様に投光されて行く。
As shown in FIG. 9, the laser light from the
第1半導体レーザー511および第2半導体レーザー521の光のうち、レンズの光学中心Oを通る(すなわち、光軸の高さが低い位置を通る)光La1およびLb1が、同軸化された光束の中で、投光光軸Lsから最も離れた位置で進んでゆく。これらの光の成分は、光学中心Oを通り光が曲がらない範囲を通る分だけであるのでわずかである。一方、レンズの光学中心Oからずれた位置を通る(すなわち、光軸の高さが高い位置を通る)光La0およびLa2、Lb0およびLb2からなる光は、同軸化された光束の大部分を占める。
Of the light of the
そして、この大部分を占めるLa0およびLa2と、Lb0およびLb2からなる光束は、一時的に細くなって互いに交差し、その後広がって行く。したがって、このLa0およびLa2と、Lb0およびLb2からなる光束の細くなっている部分に、同軸化ミラー503の開口部532が来るように配置することで、ケレラがなくなって(または少なくなって)、効果的に光強度を強くして投光させることができる。同軸化した後のレーザー光束は、ポリゴンミラー53に反射して測定空間へ向けて走査、投光される。
Then, the luminous flux composed of La0 and La2 and Lb0 and Lb2, which occupy most of this, temporarily becomes thin, intersects each other, and then spreads. Therefore, by arranging the
上記(1)式のMLが、このLa0およびLa2と、Lb0およびLb2からなる光束の細くなっている部分の範囲を示すのである。このように、本実施形態は、同軸化ミラー503の原点からの距離MLを(1)式を満たすようにする(ML条件範囲)ことで、2つの半導体レーザー511および521からのレーザー光の強度を最適化することができ、期待通りの強さにすることができる。また、このことにより、走査された測定空間に存在する物体からの反射光の強度も強くなって、投受光の効率が高くなる。
The ML of the above equation (1) indicates the range of the narrowed portion of the luminous flux composed of La0 and La2 and Lb0 and Lb2. As described above, in the present embodiment, the distance ML from the origin of the
ここで、同軸化ミラー503の原点からの距離MLの実例を紹介する。半導体レーザーの径(光軸の高さ)h=0.36mm、焦点距離f=10mm、副走査方向視野角θ=2°(tanθ=0.03492)、レンズ光学中心-投光光軸間距離L=5mmである。
Here, an example of the distance ML from the origin of the
これらの値を(1)式に当てはめると、(1)式の左辺=20.3091mm、右辺=306.672mmとなる。したがって、この例では、第2半導体レーザー521の出射面を原点0として、原点から20.3091~306.672mmの間に同軸化ミラー503の第1主面531が来るように配置することで、同軸化されて投光される光束の光強度を強くすることができる。ちなみに、この例では、副走査方向視野角θ=2°としているので、2つのレーザー光が投光光軸Lsから互いに2°広がって行くことになるので、同軸化された光束は、副走査方向に合わせて4°の広がりのスポット光束として測定空間に向けて投光されることになる。
When these values are applied to the equation (1), the left side of the equation (1) = 20.3091 mm and the right side = 306.672 mm. Therefore, in this example, the emission surface of the
(開口部の大きさ)
同軸化ミラー503の開口部532の大きさを説明する(同軸化ミラーの第2例5032の場合も同様である)。開口部532において、副走査方向の大きさhaは、レンズ光学中心-投光光軸間距離L以上、集光レンズの有効径(後述)以下とする。これにより同軸化された2つの半導体レーザー511および521から出射されたレーザー光が開口部532で損失することなく、また物体からの反射光(シグナル成分)の開口部532による損失も最小現に抑制することができる。このため開口部532の大きさhaをこのような大きさとし、かつ、前述の同軸化ミラー503の位置を(1)式を満たすようにすることで、SNが向上する。(Size of opening)
The size of the
なお、開口部532の主走査方向に対応する大きさHbは、1つの半導体レーザーの出射面から出るレーザー光の直径(主走査方向の径)以上であればよく特に限定されない。ただし、あまり大きくすると、他の部分から入ってくる迷走光などが受光系505に入ってしまうことがあるので、できるだけ小さい方が好ましい。
The size Hb corresponding to the main scanning direction of the
(光路長)
光路長について説明する。図3を参照して、第1半導体レーザー511の出射面から、同軸化ミラー503の第1主面531までの光路長をLd1とする。第2半導体レーザー521の出射面から、同軸化ミラー503の第1主面531までの光路長をLd2とする。Ld2は第2半導体レーザー521の出射面からプリズムミラー513までの光路長Ld2(1)と、プリズムミラー513から同軸化ミラー503の第1主面531までの光路長Ld2(2)を足し合わせた長さである。(Optical path length)
The optical path length will be described. With reference to FIG. 3, the optical path length from the emission surface of the
本実施形態では、装置のいっそうの小型化のために光路長Ld1と、光路長Ld2とが異なるように配置している。そして、Ld2>Ld1となっている。このように同軸化する複数のレーザー光において光路長が異なる場合、光路長の長い方の出射面を原点とする。これは、図9を使用して説明したとおり、レーザー光の大部分はレンズを通ることで投光光軸Lsの方向へ曲げられ、一旦、投光光軸Lsと交差した後、原点からの距離が長く(遠く)なるほど広がって行く。このため、原点を、同軸化ミラー503の第1主面531までの光路長が長い方に置くことで、同軸化ミラー503の配置として適した(1)式による同軸化ミラー503の原点からの距離MLを得ることができる。
In the present embodiment, the optical path length Ld1 and the optical path length Ld2 are arranged so as to be different in order to further reduce the size of the apparatus. Then, Ld2> Ld1. When the optical path lengths of the plurality of laser beams coaxialized in this way are different, the emission surface having the longer optical path length is set as the origin. This is because, as explained using FIG. 9, most of the laser light is bent in the direction of the light projection axis Ls by passing through the lens, once intersects with the light projection axis Ls, and then from the origin. The longer the distance (farther), the wider it becomes. Therefore, by placing the origin on the side with the longer optical path length to the first
(受光系)
次に、受光系505について説明する。図2および図3を参照して、受光系505は、光を受光し、受光した光の強度に対応した電気信号を出力するフォトダイオード551と、同軸化ミラー503からの反射光をフォトダイオード551へ集光させる集光レンズ552とを有する。集光レンズ552は、集光光学素子であり、ここではレンズを示したが、そのほかにたとえば、リフレクター(反射板)を用いてもよい。(Light receiving system)
Next, the
フォトダイオード551は受光素子であり、少なくとも1つ設けられている。複数のフォトダイオード551を設ける場合は、たとえば、2画素分以上となる複数のフォトダイオードを副走査方向に画素が並ぶように設置する。
The
集光レンズ552は、測定空間内に存在する物体からの反射光が、ポリゴンミラー53を経て同軸化ミラー503から反射した光をフォトダイオード551へと集光させる。このため、複数のフォトダイオード551を設けた場合、集光レンズ552は、副走査方向の光をこれら複数のフォトダイオード551へ集光させる。このため集光レンズ552の副走査方向の直径のうち、複数のフォトダイオード551へ集光できる範囲を集光レンズ552の有効径とする。
The
(ライダーの動作)
次に、ライダーの動作を説明する。図10はライダーの動作を説明するための説明図である。この図10は、ライダー10による測定空間内をポリゴンミラー53の回転に応じてレーザースポット光束600を走査、投光させる状態を示している。(Rider's movement)
Next, the operation of the rider will be described. FIG. 10 is an explanatory diagram for explaining the operation of the rider. FIG. 10 shows a state in which the laser spot
既に説明したように、投光系501からの同軸化されたレーザー光束は、パルス状に投光され、回転するポリゴンミラー53の第1ミラー面M1に入射する。その後、レーザー光束は、第1ミラー面M1で反射され、さらに第2ミラー面M2で反射した後、透明板58を透過して外部の測定空間に向けて、たとえば、図10に示すように、縦長の矩形断面を持つレーザースポット光束600(ハッチングで示す)として走査投光される。このレーザースポット光束600の縦長の形状が、既に説明した副走査方向視野角θに応じて得られるスポット光束である。
As described above, the coaxialized laser light flux from the
投光されたレーザースポット光束600は、測定空間内に存在する物体601や602で反射し、反射光として戻ってくる。同軸化された投受光系では、投光されたレーザースポット光束600の戻り光が検出される。図において物体601は車両であり、物体602は人である。もちろんこれら以外の建物や構造物なども物体として検知される。
The projected laser spot
ポリゴンミラー53の対のミラーの組み合わせにおいて、既に説明したように、4対はポリゴンミラー回転軸52に対する傾斜角が異なっている。同軸化されたレーザー光束(以下単にレーザー光束という)は、まず、1番対の第1ミラー面M1と第2ミラー面M2にて反射し、ポリゴンミラー53の回転に応じて、測定空間の一番上の領域Ln1を水平方向に左から右へと走査される。次に、レーザー光束は、2番対の第3ミラー面M3と第4ミラー面M4で反射し、ポリゴンミラー53の回転に応じて、測定空間の上から2番目の領域Ln2を水平方向に左から右へと走査される。次に、レーザー光束は、3番対の第5ミラー面M5と第6ミラー面M6で反射し、ポリゴンミラー53の回転に応じて、測定空間の上から1番目の領域Ln3を水平方向に左から右へと走査される。次に、レーザー光束は、4番対の第7ミラー面M7と第8ミラー面M8で反射し、ポリゴンミラー53の回転に応じて、測定空間の最も下の領域Ln4を水平方向に左から右へと走査される。
In the combination of the pair of mirrors of the
このようにしてライダー10が測定可能な測定空間全体の1回の走査が完了する。この領域Ln1~Ln4の走査により得られた画像を組み合わせて、1つのフレームFLが得られる。そして、ポリゴンミラー53が1回転した後、再び1番対の第1ミラー面M1と第2ミラー面M2に戻り、以降は測定空間の一番上の領域Ln1から最も下の領域Ln4までの走査を繰り返し、次のフレームFLが得られる。
In this way, one scan of the entire measurement space that can be measured by the
図1において、走査投光されたレーザー光のうち物体に当たって反射したレーザー光の一部は、再び透明板58を透過して筐体57内のポリゴンミラー53の第2ミラー面M2に入射し、ここで反射され、さらに第1ミラー面M1で反射されて、受光系505へと導かれる。受光系505では、既に説明したとおり、フォトダイオード551で受光され、複数のフォトダイオード551がある場合は、それぞれの画素ごとに検知される。このとき、制御部12が半導体レーザーの出射タイミングとフォトダイオード551の受光タイミングに基づいて物体までの距離を求める。より具体的には、たとえば、半導体レーザーからレーザー光が出射された時刻とフォトダイオード551が受光した時刻の時間差により、光源が設置されている位置、すなわち、ライダー10の設置位置から物体までの距離が得られる。このような距離の求め方をToF(Time of Flight)と称している。これにより測定空間内の全領域で物体の検出を行って、画素ごとに距離の情報を持つ距離画像のフレームFLを得ることができる。なお、かかる距離画像は、不図示のネットワーク等を介して遠方のモニターに送信されて表示されたり、不揮発性メモリ124に記憶されたりする。また、得られた距離画像を背景差分法による物体検出のために背景画像データとして記憶してもよい。
In FIG. 1, a part of the laser light reflected by hitting an object among the scanned and projected laser light passes through the
本実施形態によれば以下の効果を奏する。 According to this embodiment, the following effects are obtained.
本実施形態によれば、2つの半導体レーザー511および521と、これらからの各レーザー光を通過または透過させる同軸化ミラー503の位置を(1)式を満たす位置(ML条件範囲)にすることで、2つの半導体レーザー511および521からのレーザー光の強度を最適化して、期待通りの強さにすることができる。
According to the present embodiment, the positions of the two
これまで、レーザー光源からの光路を合成する方法としては、偏光ビームスプリッター等の偏光素子やハーフミラーを使った方法が知られている。しかし、このような偏光素子やミラーを用いると、物体からの反射光量に差異が生まれるため、その後の処理が必要となり、光学ユニットが大きくなる。本実施形態では既に説明したように、同軸化ミラー503の位置を最適化するだけで、偏光素子やハーフミラーを使わずに行い投光系501における同軸化したレーザー光の強度を最適化することができる。また、同軸化ミラー503の位置だけでなく、開口部532や光透過部535の大きさを決めることで、ポリゴンミラー53からの反射光も高効率にフォトダイオード551へ導くことができ、検知性能が向上する。
So far, as a method of synthesizing an optical path from a laser light source, a method using a polarizing element such as a polarizing beam splitter or a half mirror has been known. However, when such a polarizing element or a mirror is used, the amount of reflected light from the object is different, so that subsequent processing is required, and the optical unit becomes large. In this embodiment, as described above, only by optimizing the position of the
また、本実施形態では、投光系501をプリズムミラー513と、同軸化ミラー503、そして複数の半導体レーザーとそれぞれに対応したレンズ(コリメータレンズ)によって構成している。このため、偏光素子やハーフミラーを用いる場合より、簡易な構成にでき、投光されるレーザー光束を副走査方向に均一化することができる。また光学部品が少ない分、投光系501と受光系505の視野を一致させる場合に、発光タイミングやパルス幅、投光位置を合わせるための調整が容易になる。
Further, in the present embodiment, the
また、本実施形態では、2つの光源で副走査方向に長いレーザースポット光束を得ることができるので、投光系501を構成する部品点数を抑えて低コスト化を図ることができる。またこれにより、少ない光源であっても投光視野を副走査方向に広くすることが容易になる。
Further, in the present embodiment, since the laser spot light flux long in the sub-scanning direction can be obtained by the two light sources, the number of parts constituting the
また、同軸化ミラー503は、投光系501から投光された光が測定空間に存在する物体からの反射光である戻り光を受光系505の方向へ反射させる。受光系505においては、同軸化した際の副走査方向の視野角によって得られる長さに対応して複数のフォトダイオード551を配置することができる。
Further, the
また、本実施形態では、複数の半導体レーザーのうち、一方のレーザー光はプリズムミラー513を用いて光路を折り曲げている。これにより、複数の半導体レーザーに付随する回路基板や支持体を配置する際の部品同士の干渉の問題を回避しやすくなる。また、複数の半導体レーザーの光軸を出射側で互いに平行な状態で近づけることができるので、投光側のサイズを副走査方向に関して圧縮でき、結果として受光開口を大きくできるので、検知距離を延ばすことができ、さらには装置サイズを小さくすることができる。
Further, in the present embodiment, the laser light of one of the plurality of semiconductor lasers bends the optical path by using the
また、本実施形態のライダー10は、上述した投受光ユニット11を用いることで全体の装置構成を小型、軽量化し、しかも複数の半導体レーザーの光を期待通りにまとめて強くして出力することができるので、半導体レーザーが1個の場合と比べて、ライダー設置位置からより遠くの物体を検知し、測距することができる。
Further, the
なお、実施形態では、半導体レーザー(レーザー光源)は2つの例を説明したが、半導体レーザーは、2つに限らず、さらに多くの数設けてもよい。 In the embodiment, two examples of the semiconductor laser (laser light source) have been described, but the number of semiconductor lasers is not limited to two, and a larger number may be provided.
また、実施形態では、第2半導体レーザー521は、プリズムミラー513を用いて同軸化ミラー503の方向へ光路を折り曲げているが、プリズムミラー513を用いずに、2つの半導体レーザーのレーザー光を同軸化ミラー503の方向へ出射するようにしてもよい。さらにこの場合は、第2半導体レーザー521に対応する第2レンズ522もダイシングレンズとすることで、両者の光軸を近づけることができる。
Further, in the embodiment, the
また、実施形態では、走査ミラーであるポリゴンミラー53は、回転方向に4対、計8面としたが、ミラーの数はいくつでもよい。また、2枚一対の形態に限定されない。
Further, in the embodiment, the
以上本発明を適用した実施形態を説明したが、本発明は、これら実施形態に限定されるものではない。そのほか、本発明は特許請求の範囲に記載された構成に基づき様々な改変が可能であり、それらについても本発明の範疇である。 Although the embodiments to which the present invention is applied have been described above, the present invention is not limited to these embodiments. In addition, the present invention can be modified in various ways based on the configurations described in the claims, and these are also within the scope of the present invention.
本出願は、2018年2月22日に出願された日本国特許出願番号2018-029918号に基づいており、その開示内容は、参照により全体として組み入れられている。 This application is based on Japanese Patent Application No. 2018-029918 filed on February 22, 2018, the disclosure of which is incorporated by reference in its entirety.
11 投受光ユニット、
12 制御部、
50 投受光部、
53 ポリゴンミラー、
57 筐体、
501 投光系、
503 同軸化ミラー、
505 受光系、
511 第1半導体レーザー、
512 第1レンズ、
513 プリズムミラー、
521 第2半導体レーザー、
522 第2レンズ、
531 第1主面、
532 開口部、
533 基材、
534 反射材、
535 光透過部、
551 フォトダイオード、
552 集光レンズ。11 Light receiving unit,
12 Control unit,
50 Light receiving part,
53 polygon mirror,
57 housing,
501 floodlight system,
503 Coaxial mirror,
505 light receiving system,
511 1st semiconductor laser,
512 1st lens,
513 prism mirror,
521 2nd semiconductor laser,
522 second lens,
531 First main surface,
532 opening,
533 base material,
534 Reflective material,
535 light transmitting part,
551 photodiode,
552 Condensing lens.
Claims (11)
前記投光系から投光された光を反射させて測定空間へ向けて走査、投光し、物体に反射して戻ってきた戻り光を反射させる走査ミラーと、
光を受光する受光素子、および前記走査ミラーで反射してきた前記戻り光を前記受光素子に集光させる集光光学素子を有する受光系と、
反射材の存在しない領域、および該反射材が存在しない領域を囲む反射材の形成されている領域を有する第1主面が、前記走査ミラーの方を向いて配置され、前記投光系から投光された光を前記反射材が存在しない領域を経由して前記走査ミラーの方向へ通し、前記走査ミラーからの前記戻り光を前記反射材で前記受光系の方向へ反射させる同軸化ミラーと、
を有し、
前記光源の出射面から前記同軸化ミラーの第1主面までの距離をMLとした場合に、下記(1)式を満たすように前記同軸化ミラーを配置する、走査型光学系。
f+h/tanθ≦ML≦f+h/tanθ+2L/tanθ …(1)
ただし、(1)式中、hは前記投光レンズの光学中心からレンズ外周方向への距離、fは前記投光レンズの焦点距離、Lは前記投光レンズの光学中心から複数の前記光源の光を同軸化した後の光束の投光光軸までの距離、θは前記光源から出射された光の方向を前記投光レンズにより前記投光光軸方向へ向けるために前記投光光軸に対して傾ける角度である。A floodlight system having a plurality of light sources and a plurality of floodlight lenses for incident light from the plurality of light sources, respectively.
A scanning mirror that reflects the light projected from the projection system, scans and projects it toward the measurement space, reflects it on an object, and reflects the returned light.
A light receiving element having a light receiving element that receives light, and a light receiving optical element that condenses the return light reflected by the scanning mirror on the light receiving element, and a light receiving system.
A first main surface having a region in which the reflective material does not exist and a region in which the reflective material is formed surrounding the region in which the reflective material does not exist is arranged so as to face the scanning mirror and is projected from the projection system. A coaxialized mirror that allows the emitted light to pass in the direction of the scanning mirror through a region in which the reflecting material does not exist, and reflects the return light from the scanning mirror in the direction of the light receiving system by the reflecting material.
Have,
A scanning optical system in which the coaxial mirror is arranged so as to satisfy the following equation (1) when the distance from the emission surface of the light source to the first main surface of the coaxial mirror is ML.
f + h / tanθ ≤ ML ≤ f + h / tanθ + 2L / tanθ ... (1)
However, in the equation (1), h is the distance from the optical center of the floodlight lens toward the outer periphery of the lens, f is the focal distance of the floodlight lens, and L is the distance from the optical center of the floodlight lens to the plurality of the light sources. The distance of the light beam to the projection light axis after the light is coaxialized, θ is the projection axis in order to direct the direction of the light emitted from the light source toward the projection light axis by the projection lens. It is the angle to tilt.
前記同軸化ミラーの前記反射材の存在しない領域の副走査方向の大きさは、前記集光光学素子の有効径より小さく、前記投光レンズの光学中心から複数の前記光源の光を同軸化した後の光束の投光光軸までの距離Lより大きい、請求項1または2に記載の走査型光学系。The direction in which the scanning mirror scans light is the main scanning direction, and the direction orthogonal to the main scanning direction is the sub-scanning direction.
The size of the area of the coaxialized mirror in the sub-scanning direction in which the reflective material does not exist is smaller than the effective diameter of the condensing optical element, and the light of the plurality of light sources is coaxialized from the optical center of the projectile lens. The scanning optical system according to claim 1 or 2, wherein the distance L of the later light beam to the projected optical axis is larger than that of the light beam.
光源からの光の出射タイミングと、受光素子による光の受光タイミングに基づいて、光源が配置されている位置から物体までの距離を測定する、ライダー。
The scanning optical system according to any one of claims 1 to 10 is provided.
A rider that measures the distance from the position where the light source is placed to the object based on the timing of light emission from the light source and the timing of light reception by the light receiving element.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018029918 | 2018-02-22 | ||
| JP2018029918 | 2018-02-22 | ||
| PCT/JP2018/041400 WO2019163210A1 (en) | 2018-02-22 | 2018-11-07 | Scanning optical system and lidar |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019163210A1 JPWO2019163210A1 (en) | 2021-02-18 |
| JP7099514B2 true JP7099514B2 (en) | 2022-07-12 |
Family
ID=67687039
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020502019A Active JP7099514B2 (en) | 2018-02-22 | 2018-11-07 | Scanning optical system and rider |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7099514B2 (en) |
| WO (1) | WO2019163210A1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019218005A1 (en) | 2019-11-22 | 2021-05-27 | Robert Bosch Gmbh | LIDAR sensor |
| WO2021128239A1 (en) * | 2019-12-27 | 2021-07-01 | 华为技术有限公司 | Ranging system and mobile platform |
| WO2023108368A1 (en) * | 2021-12-13 | 2023-06-22 | 深圳市镭神智能系统有限公司 | Laser scanning module, lidar, vehicle, and robot |
| CN117686998A (en) * | 2022-09-01 | 2024-03-12 | 深圳市速腾聚创科技有限公司 | Scanning device layout method, scanning device layout device and storage medium |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002074579A (en) | 2000-09-05 | 2002-03-15 | Omron Corp | Axle detecting device |
| JP2004170965A (en) | 2002-11-07 | 2004-06-17 | Fuji Photo Optical Co Ltd | Condensing optical system |
| JP2014032149A (en) | 2012-08-06 | 2014-02-20 | Ricoh Co Ltd | Article detecting device |
| US20170131387A1 (en) | 2015-11-05 | 2017-05-11 | Luminar Technologies, Inc. | Lidar system with improved scanning speed for high-resolution depth mapping |
| WO2017183530A1 (en) | 2016-04-21 | 2017-10-26 | コニカミノルタ株式会社 | Object detection device |
-
2018
- 2018-11-07 JP JP2020502019A patent/JP7099514B2/en active Active
- 2018-11-07 WO PCT/JP2018/041400 patent/WO2019163210A1/en active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002074579A (en) | 2000-09-05 | 2002-03-15 | Omron Corp | Axle detecting device |
| JP2004170965A (en) | 2002-11-07 | 2004-06-17 | Fuji Photo Optical Co Ltd | Condensing optical system |
| JP2014032149A (en) | 2012-08-06 | 2014-02-20 | Ricoh Co Ltd | Article detecting device |
| US20170131387A1 (en) | 2015-11-05 | 2017-05-11 | Luminar Technologies, Inc. | Lidar system with improved scanning speed for high-resolution depth mapping |
| WO2017183530A1 (en) | 2016-04-21 | 2017-10-26 | コニカミノルタ株式会社 | Object detection device |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019163210A1 (en) | 2019-08-29 |
| JPWO2019163210A1 (en) | 2021-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10989794B2 (en) | Scanning optical system and radar | |
| JP7099514B2 (en) | Scanning optical system and rider | |
| US11428788B2 (en) | Laser measurement module and laser radar | |
| JPWO2016056545A1 (en) | Scanning optical system and projector / receiver | |
| JP6618042B2 (en) | Emitter / receiver | |
| JP2018529102A (en) | LIDAR sensor | |
| WO2020135802A1 (en) | Laser measurement module and laser radar | |
| CN103969637A (en) | Object detector | |
| WO2017183530A1 (en) | Object detection device | |
| JP7360298B2 (en) | surveying equipment | |
| JP2017110964A (en) | Light wave distance-measuring device | |
| CN111045018B (en) | Optical device and positioning system of robot | |
| JPWO2018147454A1 (en) | Scanning optical system and laser radar device | |
| WO2023035326A1 (en) | Hybrid solid-state lidar and scanning method therefor | |
| US11796678B2 (en) | Optical device and LiDAR system including the same | |
| WO2012042945A1 (en) | Method for arranging photoreceiving lens, and optical displacement sensor | |
| KR20240052747A (en) | auto focus system | |
| JP6867736B2 (en) | Light wave distance measuring device | |
| WO2017065048A1 (en) | Optical-scanning-type object detection device | |
| CN108226952A (en) | A kind of laser scanning imaging system | |
| JP2021110698A (en) | Optical three-dimensional shape measurement device | |
| JP2021148667A (en) | Optical device and range-finding device | |
| WO2024210090A1 (en) | Surveying device | |
| WO2024185809A1 (en) | Surveying device | |
| CN111610508B (en) | Multi-line laser radar |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220531 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220613 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7099514 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |