JP7048313B2 - 鉄道車両に備えられた蓄電装置の充放電を制御する制御装置及び制御方法 - Google Patents
鉄道車両に備えられた蓄電装置の充放電を制御する制御装置及び制御方法 Download PDFInfo
- Publication number
- JP7048313B2 JP7048313B2 JP2017255043A JP2017255043A JP7048313B2 JP 7048313 B2 JP7048313 B2 JP 7048313B2 JP 2017255043 A JP2017255043 A JP 2017255043A JP 2017255043 A JP2017255043 A JP 2017255043A JP 7048313 B2 JP7048313 B2 JP 7048313B2
- Authority
- JP
- Japan
- Prior art keywords
- threshold value
- stop
- soc
- control device
- power storage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
Landscapes
- Battery Electrode And Active Subsutance (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
Description
[第1実施形態]


[第2実施形態]
[第3実施形態]
[第4実施形態]
[第5実施形態]
[第6実施形態]
Claims (15)
- 複数の蓄電池から構成され鉄道車両に備えられる蓄電装置のバランシング制御を含む充放電制御を行う制御装置において、
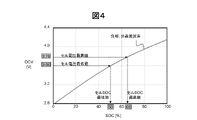
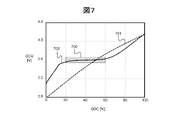
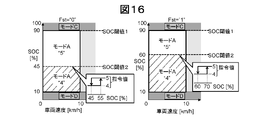
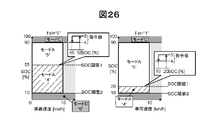
前記蓄電装置の充電率が第1の閾値以上の場合に前記蓄電装置を放電し、前記蓄電装置の充電率が第2の閾値(第2の閾値<第1の閾値)以下の場合に前記蓄電装置を充電する充放電制御部と、
前記鉄道車両が停車中である場合に、当該停車中の場所がバランシング制御を行う可能性のある予め指定した停車場であるかの停車場判定を行う停車場判定部と、
前記停車場判定の結果が真の場合に、前記第1の閾値及び前記第2の閾値の少なくとも1つを変更する閾値決定部と
を備えることを特徴とする制御装置。 - 請求項1に記載の制御装置において、
前記停車場判定は、複数の駅にそれぞれ割り当てられている駅コードのうち前記停車中の場所の駅コードが前記予め指定した停車場の駅コードであるかの判定である
ことを特徴とする制御装置。 - 請求項2に記載の制御装置において、
同一路線間を走行する複数の鉄道車両にそれぞれ割り当てられた複数の運用のうちの各々について、予め停車場が指定されており、
前記複数の鉄道車両の各々は、当該鉄道車両に割り当てられた運用に従って走行し、
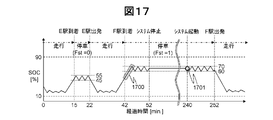
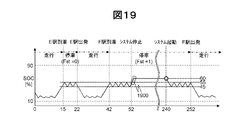
前記停車中の場所の駅コードは、前記複数の運用の各々についてどの駅をどの時刻に出発又は停車するかを示す運用情報と、現在時刻とから、採用されている運用について推定される場所の駅コードであり、
前記停車場判定は、前記停車中の場所の駅コードが、前記採用されている運用に対応した予め指定した停車場の駅コードであるかの判定である
ことを特徴とする制御装置。 - 請求項2に記載の制御装置において、
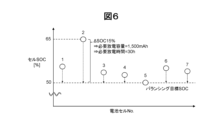
前記停車場判定は、前記停車中の場所の駅コードが前記予め指定した停車場の駅コードであって、駅に到着する都度に更新されるカウント値が、前記予め指定した停車場の駅コードに対応した所定のカウント値であるかの判定である
ことを特徴とする制御装置。 - 請求項1乃至4のうちのいずれか1項に記載の制御装置において、
前記鉄道車両は、発電機と、前記発電機を駆動するエンジンとを備え、
前記充放電制御部は、前記蓄電装置の充電率が前記第2の閾値以下の場合に、前記エンジンをアイドルアップすることで前記蓄電装置を充電する
ことを特徴とする制御装置。 - 請求項1乃至5のうちのいずれか1項に記載の制御装置において、
前記蓄電装置は、架線からの供給電力で充電可能であり、
前記充放電制御部は、前記蓄電装置の充電率が前記第2の閾値以下の場合に、前記架線からの供給電力を増やすことで前記蓄電装置を充電する
ことを特徴とする制御装置。 - 請求項1乃至6のうちのいずれか1項に記載の制御装置において、
前記鉄道車両は、前記鉄道車両の照明又は空調に用いられる補機を備え、
前記充放電制御部は、前記蓄電装置の充電率が前記第1の閾値以上の場合に、前記補機を稼働させることで前記蓄電装置を放電する
ことを特徴とする制御装置。 - 請求項1乃至7のうちのいずれか1項に記載の制御装置において、
前記鉄道車両は、発電機と、前記発電機を駆動するエンジンとを備え、
前記閾値決定部は、前記鉄道車両が前記予め指定した停車場で停車中にエンジン停止が入力された場合に、前記第2の閾値を他の停車場に比して高く設定する
ことを特徴とする制御装置。 - 請求項1乃至7のうちのいずれか1項に記載の制御装置において、
前記鉄道車両は、発電機と、前記発電機を駆動するエンジンとを備え、
前記閾値決定部は、前記鉄道車両が前記予め指定した停車場で停車中にエンジン停止が入力された場合に、前記第1の閾値を他の停車場に比して低く変更する
ことを特徴とする制御装置。 - 請求項1乃至9のうちのいずれか1項に記載の制御装置において、
前記閾値決定部は、前記停車場判定の結果が真の場合に、前記第2の閾値を、前記予め指定した停車場以外の停車場と比べて、高くする
ことを特徴とする制御装置。 - 請求項10に記載の制御装置において、
前記閾値決定部は、前記第2の閾値を60%以上とする
ことを特徴とする制御装置。 - 請求項1乃至9のうちのいずれか1項に記載の制御装置において、
前記閾値決定部は、前記停車場判定の結果が真の場合に、前記第1の閾値を、前記予め指定した停車場以外の停車場と比べて、低くする
ことを特徴とする制御装置。 - 請求項12に記載の制御装置において、
前記閾値決定部は、前記第1の閾値を20%以下とする
ことを特徴とする制御装置。 - 請求項1乃至13のうちのいずれか1項に記載の制御装置において、
前記複数の蓄電池の各々は、負極材が黒鉛又はチタン酸リチウムのリチウムイオン電池、鉛電池、又は、ニッケル水素電池である
ことを特徴とする制御装置。 - 複数の蓄電池から構成され鉄道車両に備えられる蓄電装置のバランシング制御を含む充放電制御を行う制御装置において、
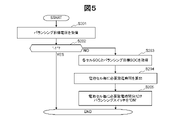
前記鉄道車両が停車中である場合に、当該停車中の場所がバランシング制御を行う可能性のある予め指定した停車場であるかの停車場判定を行うステップと、
前記停車場判定の結果が真の場合に、第1の閾値と第2の閾値との少なくとも1つを変更するステップと
前記蓄電装置の充電率が前記第1の閾値以上の場合に前記蓄電装置を放電し、前記蓄電装置の充電率が前記第2の閾値(第2の閾値<第1の閾値)以下の場合に前記蓄電装置を充電するステップと
を備えることを特徴とする制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017255043A JP7048313B2 (ja) | 2017-12-28 | 2017-12-28 | 鉄道車両に備えられた蓄電装置の充放電を制御する制御装置及び制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017255043A JP7048313B2 (ja) | 2017-12-28 | 2017-12-28 | 鉄道車両に備えられた蓄電装置の充放電を制御する制御装置及び制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019122122A JP2019122122A (ja) | 2019-07-22 |
| JP7048313B2 true JP7048313B2 (ja) | 2022-04-05 |
Family
ID=67306580
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017255043A Active JP7048313B2 (ja) | 2017-12-28 | 2017-12-28 | 鉄道車両に備えられた蓄電装置の充放電を制御する制御装置及び制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7048313B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7330817B2 (ja) * | 2019-08-26 | 2023-08-22 | 三菱重工業株式会社 | 配電システムおよび配電方法 |
| WO2021079922A1 (ja) * | 2019-10-25 | 2021-04-29 | 株式会社村田製作所 | 蓄電装置および充放電の制御方法 |
| CN114715126A (zh) * | 2021-01-04 | 2022-07-08 | 广州汽车集团股份有限公司 | 一种车辆扭矩控制方法及其系统、计算机可读存储介质 |
| WO2022185652A1 (ja) * | 2021-03-02 | 2022-09-09 | 株式会社日立製作所 | 鉄道車両用駆動システムおよび鉄道車両用駆動方法 |
| JPWO2023127344A1 (ja) * | 2021-12-28 | 2023-07-06 | ||
| JP2023175463A (ja) * | 2022-05-30 | 2023-12-12 | 株式会社日立製作所 | 鉄道車両用蓄電池システム及びその制御方法 |
| CN115946572B (zh) * | 2022-11-21 | 2023-06-30 | 上海玫克生储能科技有限公司 | 电池模组的容量计算及补电控制方法、系统、设备和介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008172857A (ja) | 2007-01-09 | 2008-07-24 | Kawasaki Heavy Ind Ltd | 鉄道車両のバッテリ用充電装置 |
| US20100275810A1 (en) | 2009-05-01 | 2010-11-04 | Barbee Gibson V | battery-powered all-electric locomotive and related locomotive and train configurations |
| JP2012143996A (ja) | 2011-01-14 | 2012-08-02 | Mitsui Chemicals Inc | 積層体およびその製造方法 |
| JP2013035183A (ja) | 2011-08-05 | 2013-02-21 | Toshiba Tec Corp | プリンタ |
| KR20170019253A (ko) | 2015-08-11 | 2017-02-21 | 한국철도기술연구원 | 급속 충전을 통한 정거장 간 전동차 운행시스템 |
-
2017
- 2017-12-28 JP JP2017255043A patent/JP7048313B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008172857A (ja) | 2007-01-09 | 2008-07-24 | Kawasaki Heavy Ind Ltd | 鉄道車両のバッテリ用充電装置 |
| US20100275810A1 (en) | 2009-05-01 | 2010-11-04 | Barbee Gibson V | battery-powered all-electric locomotive and related locomotive and train configurations |
| JP2012143996A (ja) | 2011-01-14 | 2012-08-02 | Mitsui Chemicals Inc | 積層体およびその製造方法 |
| JP2013035183A (ja) | 2011-08-05 | 2013-02-21 | Toshiba Tec Corp | プリンタ |
| KR20170019253A (ko) | 2015-08-11 | 2017-02-21 | 한국철도기술연구원 | 급속 충전을 통한 정거장 간 전동차 운행시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019122122A (ja) | 2019-07-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7048313B2 (ja) | 鉄道車両に備えられた蓄電装置の充放電を制御する制御装置及び制御方法 | |
| US8436585B2 (en) | Power supply device | |
| EP1953058B1 (en) | Hybrid cruising control system | |
| JP5297751B2 (ja) | 電源制御装置、車両走行制御システム及び蓄電池劣化状態検知方法 | |
| US8712619B2 (en) | Vehicle and method for controlling vehicle | |
| US10675983B2 (en) | Method and arrangement for determining a value of the state of energy of a battery in a vehicle | |
| US8798833B2 (en) | Vehicle and method for controlling vehicle | |
| CN103635350A (zh) | 电动车辆以及电动车辆的控制方法 | |
| CN102439780A (zh) | 二次电池的劣化度计算装置、搭载该装置的车辆以及二次电池的劣化度计算方法 | |
| CN105452050B (zh) | 用于平衡能量存储系统的方法和装置 | |
| EP1925494A2 (en) | Energy management for hybrid energy railway vehicle | |
| CN102844956A (zh) | 蓄电装置的控制装置以及搭载该蓄电装置的控制装置的车辆 | |
| EP3585642B1 (en) | A method and arrangement for balancing a battery pack | |
| JP6765208B2 (ja) | 鉄道車両 | |
| WO2022138311A1 (ja) | 蓄電システム及び蓄電方法 | |
| JP7250439B2 (ja) | 電池制御装置、電池制御システム及び電池制御方法 | |
| CN111903029A (zh) | 用于监控能量存储器的方法和控制单元 | |
| US6472880B1 (en) | Accurate voltage measurement system using relay isolated circuits | |
| CN109311396A (zh) | 用于控制车辆中的能量存储系统的操作的方法和设备 | |
| US9423465B1 (en) | State of charge determination | |
| KR102257598B1 (ko) | 전동차 배터리 상태진단 서버, 방법 및 시스템 | |
| JP2016090485A (ja) | 蓄電制御装置及び蓄電制御装置を搭載した車両駆動システム | |
| CN111071098A (zh) | 显示装置及具备该显示装置的车辆 | |
| KR102656116B1 (ko) | 멀티 세트의 하이브리드 전원에 의해 구동되는 전기 트램의 에너지 관리 시스템 | |
| CN113954819A (zh) | 用于运行车辆的方法和车辆 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200302 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211008 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220315 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220324 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7048313 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |