JP6740066B2 - 基板洗浄装置、基板処理装置および基板洗浄方法 - Google Patents
基板洗浄装置、基板処理装置および基板洗浄方法 Download PDFInfo
- Publication number
- JP6740066B2 JP6740066B2 JP2016178818A JP2016178818A JP6740066B2 JP 6740066 B2 JP6740066 B2 JP 6740066B2 JP 2016178818 A JP2016178818 A JP 2016178818A JP 2016178818 A JP2016178818 A JP 2016178818A JP 6740066 B2 JP6740066 B2 JP 6740066B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- cleaning
- cleaning tool
- center
- outer peripheral
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 title claims description 966
- 238000004140 cleaning Methods 0.000 title claims description 745
- 238000000034 method Methods 0.000 title description 43
- 238000005498 polishing Methods 0.000 claims description 227
- 230000002093 peripheral effect Effects 0.000 claims description 206
- 238000000576 coating method Methods 0.000 claims description 83
- 239000011248 coating agent Substances 0.000 claims description 80
- 230000032258 transport Effects 0.000 claims description 63
- 230000033001 locomotion Effects 0.000 claims description 59
- 238000003860 storage Methods 0.000 claims description 17
- 238000011109 contamination Methods 0.000 claims description 12
- 239000007788 liquid Substances 0.000 description 50
- 238000001035 drying Methods 0.000 description 45
- 238000010438 heat treatment Methods 0.000 description 39
- 230000018109 developmental process Effects 0.000 description 25
- 230000008569 process Effects 0.000 description 25
- 230000007246 mechanism Effects 0.000 description 24
- 239000010408 film Substances 0.000 description 22
- 238000001816 cooling Methods 0.000 description 21
- 239000013256 coordination polymer Substances 0.000 description 20
- 239000000356 contaminant Substances 0.000 description 19
- 230000003749 cleanliness Effects 0.000 description 16
- 239000012530 fluid Substances 0.000 description 15
- 239000000243 solution Substances 0.000 description 8
- KRHYYFGTRYWZRS-UHFFFAOYSA-N Fluorane Chemical compound F KRHYYFGTRYWZRS-UHFFFAOYSA-N 0.000 description 6
- 102100030373 HSPB1-associated protein 1 Human genes 0.000 description 6
- 101000843045 Homo sapiens HSPB1-associated protein 1 Proteins 0.000 description 6
- 230000008859 change Effects 0.000 description 6
- 230000002452 interceptive effect Effects 0.000 description 6
- 238000005728 strengthening Methods 0.000 description 6
- 239000013039 cover film Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000003028 elevating effect Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- WGTYBPLFGIVFAS-UHFFFAOYSA-M tetramethylammonium hydroxide Chemical compound [OH-].C[N+](C)(C)C WGTYBPLFGIVFAS-UHFFFAOYSA-M 0.000 description 4
- QTBSBXVTEAMEQO-UHFFFAOYSA-N Acetic acid Chemical compound CC(O)=O QTBSBXVTEAMEQO-UHFFFAOYSA-N 0.000 description 3
- QGZKDVFQNNGYKY-UHFFFAOYSA-N Ammonia Chemical compound N QGZKDVFQNNGYKY-UHFFFAOYSA-N 0.000 description 3
- MUBZPKHOEPUJKR-UHFFFAOYSA-N Oxalic acid Chemical compound OC(=O)C(O)=O MUBZPKHOEPUJKR-UHFFFAOYSA-N 0.000 description 3
- 239000004372 Polyvinyl alcohol Substances 0.000 description 3
- 230000007547 defect Effects 0.000 description 3
- 229920002451 polyvinyl alcohol Polymers 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- VEXZGXHMUGYJMC-UHFFFAOYSA-N Hydrochloric acid Chemical compound Cl VEXZGXHMUGYJMC-UHFFFAOYSA-N 0.000 description 2
- MHAJPDPJQMAIIY-UHFFFAOYSA-N Hydrogen peroxide Chemical compound OO MHAJPDPJQMAIIY-UHFFFAOYSA-N 0.000 description 2
- NBIIXXVUZAFLBC-UHFFFAOYSA-N Phosphoric acid Chemical compound OP(O)(O)=O NBIIXXVUZAFLBC-UHFFFAOYSA-N 0.000 description 2
- QAOWNCQODCNURD-UHFFFAOYSA-N Sulfuric acid Chemical compound OS(O)(=O)=O QAOWNCQODCNURD-UHFFFAOYSA-N 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000002708 enhancing effect Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000007654 immersion Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000007723 transport mechanism Effects 0.000 description 2
- 238000005406 washing Methods 0.000 description 2
- VHUUQVKOLVNVRT-UHFFFAOYSA-N Ammonium hydroxide Chemical compound [NH4+].[OH-] VHUUQVKOLVNVRT-UHFFFAOYSA-N 0.000 description 1
- GRYLNZFGIOXLOG-UHFFFAOYSA-N Nitric acid Chemical compound O[N+]([O-])=O GRYLNZFGIOXLOG-UHFFFAOYSA-N 0.000 description 1
- 239000006061 abrasive grain Substances 0.000 description 1
- 239000012670 alkaline solution Substances 0.000 description 1
- 229910000147 aluminium phosphate Inorganic materials 0.000 description 1
- 229910021529 ammonia Inorganic materials 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000007888 film coating Substances 0.000 description 1
- 238000009501 film coating Methods 0.000 description 1
- 238000000227 grinding Methods 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- FFUAGWLWBBFQJT-UHFFFAOYSA-N hexamethyldisilazane Chemical compound C[Si](C)(C)N[Si](C)(C)C FFUAGWLWBBFQJT-UHFFFAOYSA-N 0.000 description 1
- 239000004615 ingredient Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 239000011259 mixed solution Substances 0.000 description 1
- 229910017604 nitric acid Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 235000006408 oxalic acid Nutrition 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 239000012744 reinforcing agent Substances 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B29/00—Machines or devices for polishing surfaces on work by means of tools made of soft or flexible material with or without the application of solid or liquid polishing agents
- B24B29/02—Machines or devices for polishing surfaces on work by means of tools made of soft or flexible material with or without the application of solid or liquid polishing agents designed for particular workpieces
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67028—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like
- H01L21/6704—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing
- H01L21/67046—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing using mainly scrubbing means, e.g. brushes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B1/00—Cleaning by methods involving the use of tools
- B08B1/10—Cleaning by methods involving the use of tools characterised by the type of cleaning tool
- B08B1/12—Brushes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B1/00—Cleaning by methods involving the use of tools
- B08B1/20—Cleaning of moving articles, e.g. of moving webs or of objects on a conveyor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B11/00—Cleaning flexible or delicate articles by methods or apparatus specially adapted thereto
- B08B11/02—Devices for holding articles during cleaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/02—Cleaning by the force of jets or sprays
- B08B3/022—Cleaning travelling work
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B7/00—Cleaning by methods not provided for in a single other subclass or a single group in this subclass
- B08B7/04—Cleaning by methods not provided for in a single other subclass or a single group in this subclass by a combination of operations
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02041—Cleaning
- H01L21/02057—Cleaning during device manufacture
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02041—Cleaning
- H01L21/02096—Cleaning only mechanical cleaning
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Cleaning Or Drying Semiconductors (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Description
第1の移動速度が第2の移動速度以上である場合には、第1の洗浄具が基板の中心から基板の外周部に向かう移動と、第2の洗浄具が基板の外周部から基板の中心に向かう移動とを同時に開始しても、第1および第2の洗浄具は互いに干渉しない。そこで、第1の洗浄具の移動と第2の洗浄具の移動とが同時に開始され、第1の洗浄具が干渉領域から外れたか否かの判定が行われない。それにより、基板の外周部から基板の中心に向かう第2の洗浄具の移動をより早い時点で開始させることができる。したがって、基板の中心から基板の外周部への第1の洗浄具の移動が開始された時点からより短時間で第2の洗浄具を基板の中心に移動させることができる。
第1の移動速度が第2の移動速度以上である場合には、第1の洗浄具が基板の中心から基板の外周部に向かう移動と、第2の洗浄具が基板の外周部から基板の中心に向かう移動とを同時に開始しても、第1および第2の洗浄具は互いに干渉しない。そこで、第1の洗浄具の移動と第2の洗浄具の移動とが同時に開始され、第1の洗浄具が干渉領域から外れたか否かの判定が行われない。それにより、基板の外周部から基板の中心に向かう第2の洗浄具の移動をより早い時点で開始させることができる。したがって、基板の中心から基板の外周部への第1の洗浄具の移動が開始された時点からより短時間で第2の洗浄具を基板の中心に移動させることができる。
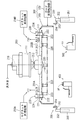
図1は本発明の一実施の形態に係る基板洗浄装置の概略構成を示す模式的平面図である。
図1の基板研磨部400および基板洗浄部500は、アーム410,510の他端部に設けられる部材(研磨ヘッドphおよび洗浄ブラシcb)が異なる点を除いて基本的に同じ構成を有する。そこで、基板研磨部400および基板洗浄部500のうち、代表して基板研磨部400の構成を説明する。
図3は図1のスピンチャック200およびその周辺部材の構成を説明するための概略側面図であり、図4は図1のスピンチャック200およびその周辺部材の構成を説明するための概略平面図である。図3および図4では、スピンチャック200により保持される基板Wが太い二点鎖線で示される。
図5は図1の基板洗浄装置700の制御系統の構成の一部を示すブロック図である。図5には、洗浄コントローラ780の機能的な構成の一部が示される。洗浄コントローラ780は、位置情報記憶部785、速度情報記憶部786、研磨洗浄制御部790およびブラシ洗浄制御部795を含む。図5の洗浄コントローラ780の各部の機能は、CPUが制御プログラムを実行することにより実現される。
図1の基板洗浄装置700においては、基板Wが筐体710内に搬入された後、スピンチャック200により保持される基板Wの上面が洗浄される。基板Wの上面を洗浄する際には、スピンチャック200の全てのチャックピン220により基板Wの外周端部が保持されつつ基板Wが回転される状態で、図3の液供給管215を通して基板Wの上面に洗浄液が供給される。洗浄液は遠心力によって基板Wの上面の全体に広がり、外方に飛散する。これにより、基板Wの上面に付着する塵埃等が洗い流される。その後、上記の位置情報および速度情報を用いて基板Wの下面の研磨洗浄および基板Wの下面のブラシ洗浄が実行される。
(a)基板処理装置の構成の概略
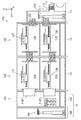
図9は、図1の基板洗浄装置700を備えた基板処理装置の模式的平面図である。図9および後述する図10〜図12には、位置関係を明確にするために互いに直交するX方向、Y方向およびZ方向を示す矢印を付している。X方向およびY方向は水平面内で互いに直交し、Z方向は鉛直方向に相当する。
図10は、主として図9の塗布処理部121、塗布現像処理部131および洗浄乾燥処理部161を示す基板処理装置100の模式的側面図である。
図11は、主として図9の熱処理部123,133および洗浄乾燥処理部162を示す基板処理装置100の模式的側面図である。図11に示すように、熱処理部123は、上方に設けられる上段熱処理部301および下方に設けられる下段熱処理部302を有する。上段熱処理部301および下段熱処理部302には、複数の熱処理装置PHP、複数の密着強化処理ユニットPAHPおよび複数の冷却ユニットCPが設けられる。
図12は、主として図9の搬送部122,132,163を示す側面図である。図12に示すように、搬送部122は、上段搬送室125および下段搬送室126を有する。搬送部132は、上段搬送室135および下段搬送室136を有する。上段搬送室125には搬送装置(搬送ロボット)127が設けられ、下段搬送室126には搬送装置128が設けられる。また、上段搬送室135には搬送装置137が設けられ、下段搬送室136には搬送装置138が設けられる。
図9〜図12を参照しながら基板処理装置100の動作を説明する。インデクサブロック11のキャリア載置部111(図9)に、未処理の基板Wが収容されたキャリア113が載置される。搬送装置115は、キャリア113から基板載置部PASS1,PASS3(図12)に未処理の基板Wを搬送する。また、搬送装置115は、基板載置部PASS2,PASS4(図12)に載置された処理済の基板Wをキャリア113に搬送する。
(a)上記のように、本実施の形態に係る基板洗浄装置700においては、基板研磨部400の研磨ヘッドphにより基板Wの下面が研磨洗浄され、基板洗浄部500の洗浄ブラシcbにより基板Wの下面がブラシ洗浄される。
(a)上記実施の形態では、洗浄コントローラ780に速度情報として記憶される第2の移動速度が第1の移動速度よりも高く設定されるが、基板Wの洗浄方法によっては、第1および第2の移動速度は等しく設定される可能性がある。あるいは、第2の移動速度が第1の移動速度よりも低く設定される可能性がある。
以下、請求項の各構成要素と実施の形態の各構成要素との対応の例について説明するが、本発明は下記の例に限定されない。
[10]参考形態
(1)第1の参考形態に係る基板洗浄装置は、基板を保持して回転させる回転保持部と、基板の一面に接触可能に構成された第1および第2の洗浄具と、第1の洗浄具を回転保持部により回転される基板の一面に接触させつつ基板の中心と基板の外周部とを結ぶ第1の経路に沿って移動させる第1の移動部と、第2の洗浄具を回転保持部により回転される基板の一面に接触させつつ基板の中心と基板の外周部とを結ぶ第2の経路に沿って移動させる第2の移動部と、基板の中心から基板の外周部に向かって移動する第1の洗浄具が、第1の経路に沿った第1の洗浄具の軌跡と第2の経路に沿った第2の洗浄具の軌跡とが重複する干渉領域から外れる時点における第1の洗浄具の位置を示す位置情報を予め記憶する記憶部と、第1の洗浄具が基板の中心から基板の外周部に向かって移動するように第1の移動部を制御し、位置情報に基づいて第1の洗浄具が干渉領域から外れたか否かを判定し、第1の洗浄具が干渉領域から外れたと判定した時点で、第2の洗浄具が基板の外周部から基板の中心に向かう移動を開始するように第2の移動部を制御する制御部とを備える。
その基板洗浄装置においては、回転される基板の一面に第1の洗浄具が接触されつつ第1の洗浄具が第1の経路に沿って移動し、回転される基板の一面に第2の洗浄具が接触されつつ第2の洗浄具が第2の経路に沿って移動する。それにより、基板が第1および第2の洗浄具により洗浄される。
第1の洗浄具が基板の中心から基板の外周部に向かって移動されるとともに、第1の洗浄具が干渉領域から外れたか否かが判定される。第1の洗浄具が干渉領域から外れたと判定された時点で基板の外周部から基板の中心に向かう第2の洗浄具の移動が開始される。この場合、第1の洗浄具が干渉領域から外れているので、第1および第2の洗浄具が同時に移動しても第1の洗浄具と第2の洗浄具とは干渉しない。したがって、第1および第2の洗浄具の移動について煩雑な設定作業を要することなく、第1の洗浄具と第2の洗浄具との干渉を防止することができる。
また、上記の構成によれば、第1の洗浄具が基板の外周部に到達する前に第2の洗浄具が基板の外周部から基板の中心への移動を開始するので、第1の洗浄具が外周部への移動を開始してから第2の洗浄具が基板の中心に到達するまでの時間を短縮することができる。したがって、第1の洗浄具による基板の洗浄後または洗浄中に、第2の洗浄具による基板の洗浄を迅速に行うことができる。
これらの結果、第1および第2の洗浄具の移動について干渉を防止するための煩雑な設定作業が不要でかつスループットの低下を抑制しつつ基板の清浄度を向上させることが可能になる。
(2)第2の洗浄具が基板の外周部から基板の中心に向かって移動する速度は、第1の洗浄具が基板の中心から基板の外周部に向かって移動する速度よりも高くてもよい。
この場合、第1の洗浄具が干渉領域から外れた時点から短時間で第2の洗浄具を基板の中心に移動させることができる。
(3)制御部は、第1の洗浄具が基板の外周部から基板の中心に向かって移動する間に第1の洗浄具が基板の一面から離間し、第1の洗浄具が基板の中心から基板の外周部に向かって移動する間に第1の洗浄具が基板の一面に接触するように第1の移動部を制御し、第2の洗浄具が基板の外周部から基板の中心に向かって移動する間に第2の洗浄具が基板の一面から離間し、第2の洗浄具が基板の中心から基板の外周部に向かって移動する間に第2の洗浄具が基板の一面に接触するように第2の移動部を制御してもよい。
この場合、第1の洗浄具が基板の中心から基板の外周部に向かって移動する間に基板の一面が第1の洗浄具により洗浄される。第1の洗浄具による基板の一面の洗浄時に、第1の洗浄具により除去された汚染物は、遠心力により基板の外周部に向かって流れる。それにより、除去された汚染物が第1の洗浄具よりも基板の中心側に回り込むことが防止される。
第2の洗浄具が基板の中心から基板の外周部に向かって移動する間に基板の一面が第2の洗浄具により洗浄される。第2の洗浄具による基板の一面の洗浄時に、第2の洗浄具により除去された汚染物は、遠心力により基板の外周部に向かって流れる。それにより、除去された汚染物が第2の洗浄具よりも基板の中心側に回り込むことが防止される。
これらの結果、第1および第2の洗浄具による洗浄後の基板の清浄度がより向上する。
(4)第1の洗浄具が基板の外周部から基板の中心に向かって移動する速度は、第1の洗浄具が基板の中心から基板の外周部に向かって移動する速度よりも高く、第2の洗浄具が基板の外周部から基板の中心に向かって移動する速度は、第2の洗浄具が基板の中心から基板の外周部に向かって移動する速度よりも高くてもよい。
この場合、基板の外周部に位置する第1および第2の洗浄具を短時間で基板の中心に移動させることができる。
(5)第1の洗浄具は、研磨具であり、第2の洗浄具は、ブラシであってもよい。
この場合、研磨具による基板の一面の研磨後に、ブラシにより基板の一面が洗浄される。それにより、基板の一面の研磨により発生する汚染物が除去される。したがって、基板の清浄度がさらに向上する。
(6)制御部は、第1の洗浄具が基板の中心から基板の外周部に向かうときの第1の移動速度と第2の洗浄具が基板の外周部から基板の中心に向かうときの第2の移動速度とを予め比較し、第1の移動速度が第2の移動速度以上である場合に、第1の洗浄具が干渉領域から外れたか否かの判定を行わずに、第1の洗浄具が基板の中心から基板の外周部に向かう移動と、第2の洗浄具が基板の外周部から基板の中心に向かう移動とを同時に開始するように第1および第2の移動部を制御してもよい。
第1の移動速度が第2の移動速度以上である場合には、第1の洗浄具が基板の中心から基板の外周部に向かう移動と、第2の洗浄具が基板の外周部から基板の中心に向かう移動とを同時に開始しても、第1および第2の洗浄具は互いに干渉しない。それにより、基板の外周部から基板の中心に向かう第2の洗浄具の移動をより早い時点で開始させることができる。したがって、基板の中心から基板の外周部への第1の洗浄具の移動が開始された時点からより短時間で第2の洗浄具を基板の中心に移動させることができる。
(7)第2の参考形態に係る基板処理装置は、露光装置に隣接するように配置される基板処理装置であって、基板の上面に感光性膜を塗布する塗布装置と、上記の基板洗浄装置と、塗布装置、基板洗浄装置および露光装置の間で基板を搬送する搬送装置とを備え、基板洗浄装置は、露光装置による基板の露光処理前に基板の一面としての下面の汚染を除去する。
その基板処理装置においては、露光処理前の基板の下面の汚染が上記の基板洗浄装置により除去される。上記の基板洗浄装置によれば、第1および第2の洗浄具の移動について煩雑な設定作業が不要でかつスループットの低下を抑制しつつ基板の清浄度を向上させることが可能である。その結果、基板の製造コストを増大させることなく基板の下面の汚染に起因する基板の処理不良の発生が抑制される。
(8)第3の参考形態に係る基板洗浄方法は、基板を保持して回転させるステップと、第1の洗浄具を回転される基板の一面に接触させつつ基板の中心と基板の外周部とを結ぶ第1の経路に沿って移動させるステップと、第2の洗浄具を回転される基板の一面に接触させつつ基板の中心と基板の外周部とを結ぶ第2の経路に沿って移動させるステップと、基板の中心から基板の外周部に向かって移動する第1の洗浄具が、第1の経路に沿った第1の洗浄具の軌跡と第2の経路に沿った第2の洗浄具の軌跡とが重複する干渉領域から外れる時点における第1の洗浄具の位置を示す位置情報を予め記憶するステップとを含み、第1の洗浄具を第1の経路に沿って移動させるステップは、第1の洗浄具を基板の中心から基板の外周部に向かって移動させるステップと、位置情報に基づいて第1の洗浄具が干渉領域から外れたか否かを判定するステップとを含み、第2の洗浄具を第2の経路に沿って移動させるステップは、判定するステップにより第1の洗浄具が干渉領域から外れたと判定された時点で基板の外周部から基板の中心に向かう第2の洗浄具の移動を開始させるステップを含む。
その基板洗浄方法においては、回転される基板の一面に第1の洗浄具が接触されつつ第1の洗浄具が第1の経路に沿って移動し、回転される基板の一面に第2の洗浄具が接触されつつ第2の洗浄具が第2の経路に沿って移動する。それにより、基板が第1および第2の洗浄具により洗浄される。
第1の洗浄具が基板の中心から基板の外周部に向かって移動されるとともに、第1の洗浄具が干渉領域から外れたか否かが判定される。第1の洗浄具が干渉領域から外れたと判定された時点で基板の外周部から基板の中心に向かう第2の洗浄具の移動が開始される。この場合、第1の洗浄具が干渉領域から外れているので、第1および第2の洗浄具が同時に移動しても第1の洗浄具と第2の洗浄具とは干渉しない。したがって、第1および第2の洗浄具の移動について煩雑な設定作業を要することなく、第1の洗浄具と第2の洗浄具との干渉を防止することができる。
また、上記の構成によれば、第1の洗浄具が基板の外周部に到達する前に第2の洗浄具が基板の外周部から基板の中心への移動を開始するので、第1の洗浄具が外周部への移動を開始してから第2の洗浄具が基板の中心に到達するまでの時間を短縮することができる。したがって、第1の洗浄具による基板の洗浄後または洗浄中に、第2の洗浄具による基板の洗浄を迅速に行うことができる。
これらの結果、第1および第2の洗浄具の移動について干渉を防止するための煩雑な設定作業が不要でかつスループットの低下を抑制しつつ基板の清浄度を向上させることが可能になる。
12 第1の処理ブロック
13 第2の処理ブロック
14 インターフェイスブロック
14A 洗浄乾燥処理ブロック
14B 搬入搬出ブロック
15 露光装置
15a 基板搬入部
15b 基板搬出部
21,22,23,24,32,34 塗布処理室
25,35,200 スピンチャック
27,37 カップ
28 処理液ノズル
29 ノズル搬送機構
31,33 現像処理室
38 現像ノズル
39 移動機構
50,60 流体ボックス部
81〜84,91〜95 洗浄乾燥処理室
100 基板処理装置
111 キャリア載置部
112,122,132,163 搬送部
113 キャリア
114 メインコントローラ
115,127,128,137,138,141,142,146 搬送装置
121 塗布処理部
123,133 熱処理部
125,135 上段搬送室
126,136 下段搬送室
129 塗布処理ユニット
131 塗布現像処理部
139 現像処理ユニット
161,162 洗浄乾燥処理部
211 スピンモータ
212,352 回転軸
213 スピンプレート
214 プレート支持部材
215 液供給管
220 チャックピン
221 軸部
222 ピン支持部
223 保持部
224 マグネット
231A,231B,232A,232B マグネットプレート
233A,233B,234A,234B マグネット昇降機構
300 ガード機構
301,303 上段熱処理部
302,304 下段熱処理部
310 ガード
320 ガード昇降駆動部
350 受け渡し機構
351 昇降回転駆動部
353,410,510 アーム
354 保持ピン
400 基板研磨部
409,509 中心軸
410N,510N ノズル
411 アーム一端部
412 アーム本体部
413 アーム他端部
414 回転支持軸
415,417 プーリ
416 ベルト
418 モータ
420,520 アーム支持柱
430 アーム昇降駆動部
431 リニアガイド
432 エアシリンダ
433 電空レギュレータ
440 アーム回転駆動部
441 エンコーダ
500 基板洗浄部
700 基板洗浄装置
710 筐体
711,712,713,714 側壁
716 底面部
780 洗浄コントローラ
785 位置情報記憶部
786 速度情報記憶部
790 研磨洗浄制御部
791 回転制御部
792 昇降制御部
793 アーム制御部
794 位置判定部
795 ブラシ洗浄制御部
CP 冷却ユニット
EEW エッジ露光部
P−BF1,P−BF2 載置兼バッファ部
P−CP 載置兼冷却部
PAHP 密着強化処理ユニット
PASS1〜PASS9 基板載置部
PHP 熱処理装置
SD2 洗浄乾燥処理ユニット
W 基板
WC 中心
WE 外周端部
cb 洗浄ブラシ
if 干渉領域
lc1 第1の軌跡
lc2 第2の軌跡
p1 ヘッド待機位置
p2 ブラシ待機位置
ph 研磨ヘッド
pt1 第1の経路
pt2 第2の経路
Claims (7)
- 基板を保持して回転させる回転保持部と、
基板の一面に接触可能に構成された第1および第2の洗浄具と、
前記第1の洗浄具を前記回転保持部により回転される基板の中心と基板の外周部とを結ぶ第1の経路に沿って移動させる第1の移動部と、
前記第2の洗浄具を前記回転保持部により回転される基板の中心と基板の外周部とを結ぶ第2の経路に沿って移動させる第2の移動部と、
基板の中心から基板の外周部に向かって移動する前記第1の洗浄具が、前記第1の経路に沿った前記第1の洗浄具の軌跡と前記第2の経路に沿った前記第2の洗浄具の軌跡とが重複する干渉領域から外れる時点における前記第1の洗浄具の位置を示す位置情報を予め記憶する記憶部と、
前記第1の洗浄具が基板の中心から基板の外周部に向かって移動するように前記第1の移動部を制御するとともに、前記第2の洗浄具が基板の外周部から基板の中心に向かって移動するように前記第2の移動部を制御する制御部とを備え、
前記制御部は、
前記第1および第2の移動部の制御を行う前に、前記第1の洗浄具が基板の中心から基板の外周部に向かうときの第1の移動速度と前記第2の洗浄具が基板の外周部から基板の中心に向かうときの第2の移動速度とを予め比較し、
前記第1の移動速度が前記第2の移動速度よりも低い場合に、前記第1の移動部の制御を開始した後、前記位置情報に基づいて前記第1の洗浄具が前記干渉領域から外れたか否かを判定し、前記第1の洗浄具が前記干渉領域から外れたと判定した時点で、基板の外周部から基板の中心に向かう前記第2の洗浄具の移動が開始されるように前記第2の移動部を制御し、
前記第1の移動速度が前記第2の移動速度以上である場合に、基板の中心から基板の外周部に向かう前記第1の洗浄具の移動と、基板の外周部から基板の中心に向かう前記第2の洗浄具の移動とが同時に開始されるように前記第1および第2の移動部を制御し、前記第1の洗浄具が前記干渉領域から外れたか否かの判定を行わない、基板洗浄装置。 - 前記第2の移動速度は、前記第1の移動速度よりも高い、請求項1記載の基板洗浄装置。
- 前記制御部は、前記第1の洗浄具が基板の外周部から基板の中心に向かって移動する間に前記第1の洗浄具が基板の前記一面から離間し、前記第1の洗浄具が基板の中心から基板の外周部に向かって移動する間に前記第1の洗浄具が基板の前記一面に接触するように前記第1の移動部を制御し、前記第2の洗浄具が基板の外周部から基板の中心に向かって移動する間に前記第2の洗浄具が基板の前記一面から離間し、前記第2の洗浄具が基板の中心から基板の外周部に向かって移動する間に前記第2の洗浄具が基板の前記一面に接触するように前記第2の移動部を制御する、請求項1または2記載の基板洗浄装置。
- 前記第1の洗浄具が基板の外周部から基板の中心に向かって移動する速度は、前記第1の洗浄具が基板の中心から基板の外周部に向かって移動する前記第1の移動速度よりも高く、前記第2の洗浄具が基板の外周部から基板の中心に向かって移動する前記第2の移動速度は、前記第2の洗浄具が基板の中心から基板の外周部に向かって移動する速度よりも高い、請求項1〜3のいずれか一項に記載の基板洗浄装置。
- 前記第1の洗浄具は、研磨具であり、
前記第2の洗浄具は、ブラシである、請求項1〜4のいずれか一項に記載の基板洗浄装置。 - 露光装置に隣接するように配置される基板処理装置であって、
基板の上面に感光性膜を塗布する塗布装置と、
請求項1〜5のいずれか一項に記載の基板洗浄装置と、
前記塗布装置、前記基板洗浄装置および前記露光装置の間で基板を搬送する搬送装置とを備え、
前記基板洗浄装置は、前記露光装置による基板の露光処理前に基板の前記一面としての下面の汚染を除去する、基板処理装置。 - 基板を保持して回転させるステップと、
第1の洗浄具を前記回転される基板の中心と基板の外周部とを結ぶ第1の経路に沿って基板の中心から基板の外周部に移動させるとともに、第2の洗浄具を前記回転される基板の中心と基板の外周部とを結ぶ第2の経路に沿って基板の外周部から基板の中心に移動させるステップと、
前記第1および前記第2の洗浄具を移動させるステップの前に、基板の中心から基板の外周部に向かって移動する前記第1の洗浄具が、前記第1の経路に沿った前記第1の洗浄具の軌跡と前記第2の経路に沿った前記第2の洗浄具の軌跡とが重複する干渉領域から外れる時点における前記第1の洗浄具の位置を示す位置情報を予め記憶するステップと、
前記第1および前記第2の洗浄具を移動させるステップの前に、前記第1の洗浄具が基板の中心から基板の外周部に向かうときの第1の移動速度と前記第2の洗浄具が基板の外周部から基板の中心に向かうときの第2の移動速度とを予め比較するステップとを含み、
前記第1および前記第2の洗浄具を移動させるステップは、
前記比較するステップにおいて前記第1の移動速度が前記第2の移動速度よりも低い場合に、基板の中心から基板の外周部に向かう前記第1の洗浄具の移動を開始した後、前記位置情報に基づいて前記第1の洗浄具が前記干渉領域から外れたか否かを判定し、前記第1の洗浄具が前記干渉領域から外れたと判定した時点で、基板の外周部から基板の中心に向かう前記第2の洗浄具の移動を開始することと、
前記比較するステップにおいて前記第1の移動速度が前記第2の移動速度以上である場合に、基板の中心から基板の外周部に向かう前記第1の洗浄具の移動と、基板の外周部から基板の中心に向かう前記第2の洗浄具の移動とを同時に開始し、前記第1の洗浄具が前記干渉領域から外れたか否かの判定を行わないこととを含む、基板洗浄方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016178818A JP6740066B2 (ja) | 2016-09-13 | 2016-09-13 | 基板洗浄装置、基板処理装置および基板洗浄方法 |
| US15/697,775 US10668591B2 (en) | 2016-09-13 | 2017-09-07 | Substrate cleaning device, substrate processing apparatus and substrate cleaning method |
| TW106130753A TWI653680B (zh) | 2016-09-13 | 2017-09-08 | 基板洗淨裝置、基板處理裝置及基板洗淨方法 |
| KR1020170115952A KR101993047B1 (ko) | 2016-09-13 | 2017-09-11 | 기판 세정 장치, 기판 처리 장치 및 기판 세정 방법 |
| CN201710814078.0A CN107818929B (zh) | 2016-09-13 | 2017-09-11 | 基板清洗装置、基板处理装置及基板清洗方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016178818A JP6740066B2 (ja) | 2016-09-13 | 2016-09-13 | 基板洗浄装置、基板処理装置および基板洗浄方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018046109A JP2018046109A (ja) | 2018-03-22 |
| JP2018046109A5 JP2018046109A5 (ja) | 2019-11-14 |
| JP6740066B2 true JP6740066B2 (ja) | 2020-08-12 |
Family
ID=61559572
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016178818A Active JP6740066B2 (ja) | 2016-09-13 | 2016-09-13 | 基板洗浄装置、基板処理装置および基板洗浄方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10668591B2 (ja) |
| JP (1) | JP6740066B2 (ja) |
| KR (1) | KR101993047B1 (ja) |
| CN (1) | CN107818929B (ja) |
| TW (1) | TWI653680B (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10269555B2 (en) * | 2015-09-30 | 2019-04-23 | Taiwan Semiconductor Manufacturing Company, Ltd. | Post-CMP cleaning and apparatus |
| CN109623658B (zh) * | 2018-12-26 | 2024-07-23 | 浙江杰奈尔新材料有限公司 | 一种研磨机用清洗装置 |
| JP7446073B2 (ja) * | 2019-09-27 | 2024-03-08 | 株式会社Screenホールディングス | 基板処理装置 |
| CN110639878B (zh) * | 2019-10-16 | 2021-05-28 | 郑美花 | 一种废弃锂电池石墨棒清洁方法 |
| CN111261553B (zh) * | 2020-01-19 | 2024-03-26 | 北京北方华创微电子装备有限公司 | 晶圆清洗装置 |
| US11417512B2 (en) * | 2020-02-10 | 2022-08-16 | Taiwan Semiconductor Manufacturing Co., Ltd. | Method for cleaning semiconductor wafer backside surface by hybrid brush assembly |
| CN114639601B (zh) * | 2022-02-17 | 2023-04-28 | 中环领先半导体材料有限公司 | 一种提升减薄机稼动率的新型工艺 |
| JP2023137471A (ja) * | 2022-03-18 | 2023-09-29 | 株式会社Screenホールディングス | 基板処理方法および基板処理装置 |
| CN115338718B (zh) * | 2022-10-18 | 2023-03-24 | 杭州众硅电子科技有限公司 | 一种晶圆抛光系统 |
| EP4407664A1 (en) * | 2022-12-23 | 2024-07-31 | SCREEN Holdings Co., Ltd. | Substrate processing device and substrate processing method |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5518542A (en) * | 1993-11-05 | 1996-05-21 | Tokyo Electron Limited | Double-sided substrate cleaning apparatus |
| JPH0936070A (ja) * | 1995-07-21 | 1997-02-07 | Nippon Steel Corp | 半導体ウエハの研磨装置 |
| JP3393016B2 (ja) | 1996-04-15 | 2003-04-07 | 大日本スクリーン製造株式会社 | 基板洗浄装置および方法 |
| JP3372760B2 (ja) * | 1996-07-02 | 2003-02-04 | 大日本スクリーン製造株式会社 | 基板洗浄装置および基板洗浄方法 |
| JP2002361155A (ja) | 2001-06-01 | 2002-12-17 | Tokyo Electron Ltd | 塗布処理装置及びその方法 |
| JP2005228961A (ja) * | 2004-02-13 | 2005-08-25 | Dainippon Screen Mfg Co Ltd | 基板洗浄装置 |
| JP2008016781A (ja) | 2006-07-10 | 2008-01-24 | Dainippon Screen Mfg Co Ltd | 基板処理方法および基板処理装置 |
| JP4983565B2 (ja) * | 2006-12-20 | 2012-07-25 | 東京エレクトロン株式会社 | 基板洗浄装置、基板洗浄方法及び記憶媒体 |
| US8578953B2 (en) | 2006-12-20 | 2013-11-12 | Tokyo Electron Limited | Substrate cleaning apparatus, substrate cleaning method, and computer-readable storage medium |
| JP5039468B2 (ja) | 2007-07-26 | 2012-10-03 | 株式会社Sokudo | 基板洗浄装置およびそれを備えた基板処理装置 |
| JP4939376B2 (ja) | 2007-11-13 | 2012-05-23 | 株式会社Sokudo | 基板処理装置 |
| JP5173517B2 (ja) * | 2008-03-26 | 2013-04-03 | 大日本スクリーン製造株式会社 | 基板処理装置および基板処理方法 |
| JP6228508B2 (ja) | 2014-05-01 | 2017-11-08 | 東京エレクトロン株式会社 | 洗浄装置、剥離システム、洗浄方法、プログラム及びコンピュータ記憶媒体 |
| JP6503194B2 (ja) | 2015-02-16 | 2019-04-17 | 株式会社Screenホールディングス | 基板処理装置 |
-
2016
- 2016-09-13 JP JP2016178818A patent/JP6740066B2/ja active Active
-
2017
- 2017-09-07 US US15/697,775 patent/US10668591B2/en active Active
- 2017-09-08 TW TW106130753A patent/TWI653680B/zh active
- 2017-09-11 KR KR1020170115952A patent/KR101993047B1/ko active IP Right Grant
- 2017-09-11 CN CN201710814078.0A patent/CN107818929B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20180029913A (ko) | 2018-03-21 |
| TWI653680B (zh) | 2019-03-11 |
| US10668591B2 (en) | 2020-06-02 |
| US20180071884A1 (en) | 2018-03-15 |
| TW201816870A (zh) | 2018-05-01 |
| CN107818929A (zh) | 2018-03-20 |
| CN107818929B (zh) | 2021-07-09 |
| JP2018046109A (ja) | 2018-03-22 |
| KR101993047B1 (ko) | 2019-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6740066B2 (ja) | 基板洗浄装置、基板処理装置および基板洗浄方法 | |
| JP6740065B2 (ja) | 基板洗浄装置、基板処理装置、基板洗浄方法および基板処理方法 | |
| KR101798320B1 (ko) | 기판 처리 장치 | |
| JP6992131B2 (ja) | 基板洗浄装置、基板処理装置、基板洗浄方法および基板処理方法 | |
| KR101972226B1 (ko) | 기판 세정 장치 및 그것을 구비하는 기판 처리 장치 | |
| TWI654036B (zh) | Substrate processing method, substrate processing apparatus, and recording medium | |
| JPH10247621A (ja) | レジスト処理方法及びレジスト処理システム | |
| US20230100773A1 (en) | Unit for supplying liquid, apparatus and method for treating substrate with the unit | |
| JP2014038958A (ja) | 浸漬式の洗浄装置 | |
| JP2024044905A (ja) | 基板洗浄装置および基板洗浄方法 | |
| JP2024044924A (ja) | 基板洗浄装置および基板洗浄方法 | |
| JP2024018422A (ja) | 基板洗浄装置、および、基板洗浄方法 | |
| JP2024084105A (ja) | 基板処理装置及び基板処理方法 | |
| KR20230101837A (ko) | 기판 처리 장치, 기판 처리 방법 및 컴퓨터 판독 가능한 기록 매체 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190624 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191004 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200319 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200526 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200630 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200722 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6740066 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |