JP6729780B1 - Magnetic recording medium and cartridge - Google Patents
Magnetic recording medium and cartridge Download PDFInfo
- Publication number
- JP6729780B1 JP6729780B1 JP2019212632A JP2019212632A JP6729780B1 JP 6729780 B1 JP6729780 B1 JP 6729780B1 JP 2019212632 A JP2019212632 A JP 2019212632A JP 2019212632 A JP2019212632 A JP 2019212632A JP 6729780 B1 JP6729780 B1 JP 6729780B1
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- recording medium
- less
- magnetic recording
- magnetic tape
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Landscapes
- Magnetic Record Carriers (AREA)
- Moving Of The Head To Find And Align With The Track (AREA)
Abstract
【課題】優れた走行安定性と電磁変換特性を両立する磁気記録媒体を提供する。【解決手段】記録再生システムにおいて、磁気テープMTは、テープ状の磁気記録媒体であって、基体41と、基体上に設けられた下地層42と、下地層上に設けられた磁性層43とを備える。基体は、ポリエステルを含み、下地層及び磁性層は、潤滑剤を含み、磁性層は、多数の孔部43Aが設けられた表面を有し、表面の算術平均粗さRaは、2.5nm以下であり、磁気記録媒体が洗浄、乾燥された状態において測定された、磁気記録媒体の全体のBET比表面積は、3.5m2/g以上7.0m2/g以下であり、磁性層の垂直方向における角形比は、65%以上であり、磁性層の平均厚みは、80nm以下であり、磁気記録媒体の平均厚みは、5.6μm以下であり、磁性層にはサーボパターンが記録され、サーボパターンの非直線性を示す統計値σSWは、24nm以下である。【選択図】図4PROBLEM TO BE SOLVED: To provide a magnetic recording medium having both excellent running stability and electromagnetic conversion characteristics. In a recording/reproducing system, a magnetic tape MT is a tape-shaped magnetic recording medium, and includes a substrate 41, an underlayer 42 provided on the substrate, and a magnetic layer 43 provided on the underlayer. Equipped with. The substrate contains polyester, the underlayer and the magnetic layer contain a lubricant, the magnetic layer has a surface provided with a large number of holes 43A, and the arithmetic average roughness Ra of the surface is 2.5 nm or less. The BET specific surface area of the entire magnetic recording medium measured in a state where the magnetic recording medium was washed and dried was 3.5 m2/g or more and 7.0 m2/g or less, and the BET specific surface area in the perpendicular direction of the magnetic layer was The squareness ratio is 65% or more, the average thickness of the magnetic layer is 80 nm or less, the average thickness of the magnetic recording medium is 5.6 μm or less, and the servo pattern is recorded on the magnetic layer. The statistical value σ SW indicating non-linearity is 24 nm or less. [Selection diagram] Fig. 4
Description
本開示は、磁気記録媒体およびカートリッジに関する。 The present disclosure relates to magnetic recording media and cartridges.
電子データの保存のために、テープ状の磁気記録媒体が幅広く利用されている。この磁気記録媒体では、種々の特性向上が検討されている。 Tape-shaped magnetic recording media are widely used for storing electronic data. In this magnetic recording medium, various improvements in characteristics have been studied.
特許文献1では、優れた走行安定性と電磁変換特性を両立させるために、磁性層形成面の表面の二乗平均表面粗さ(Rq)を4.0nm以下とし、磁性層形成面の表面プロファイルにおける歪度(Sk:Skewness)を−1以上+1以下とすることが記載されている。 In Patent Document 1, in order to achieve both excellent running stability and electromagnetic conversion characteristics, the root mean square surface roughness (Rq) of the surface of the magnetic layer forming surface is set to 4.0 nm or less, and the surface profile of the magnetic layer forming surface is It is described that the skewness (Sk: Skewness) is -1 or more and +1 or less.
テープ状の磁気記録媒体は通常、カートリッジケースに収容される。カートリッジの記録容量をさらに増やすために、カートリッジに収容される磁気記録媒体をより薄くして(全厚を低減して)、カートリッジのテープ長を増加させることが考えられる。しかしながら、全厚が薄い磁気記録媒体は走行安定性に劣る場合がある。特には繰り返し記録および/または再生を行う場合に、全厚が薄い磁気記録媒体は、その表面状態、特には摩擦に関する表面状態が変化し、走行安定性が劣化する場合がある。 The tape-shaped magnetic recording medium is usually housed in a cartridge case. In order to further increase the recording capacity of the cartridge, it is conceivable to make the magnetic recording medium contained in the cartridge thinner (to reduce the total thickness) and increase the tape length of the cartridge. However, a magnetic recording medium having a small total thickness may be inferior in running stability. In particular, when recording and/or reproducing repeatedly, the magnetic recording medium having a small total thickness may change its surface condition, particularly the surface condition relating to friction, and may deteriorate running stability.
本開示の目的は、磁気記録媒体の全厚が薄い場合であっても、優れた走行安定性と電磁変換特性を両立することができる磁気記録媒体およびカートリッジを提供することにある。 An object of the present disclosure is to provide a magnetic recording medium and a cartridge that can achieve both excellent running stability and electromagnetic conversion characteristics even when the total thickness of the magnetic recording medium is thin.
上述の課題を解決するために、第1の開示は、テープ状の磁気記録媒体であって、基体と、基体上に設けられた下地層と、下地層上に設けられた磁性層と、基体の下地層とは反対側の面に設けられたバック層とを備え、基体は、ポリエステルを含み、基体の平均厚みが4.2μm以下であり、下地層および磁性層は、潤滑剤を含み、磁性層表面の算術平均粗さRaは、2.5nm以下であり、磁気記録媒体が洗浄、乾燥された状態において測定された、磁気記録媒体の全体のBET比表面積は、3.5m2/g以上7.0m2/g以下であり、磁性層の垂直方向における角形比は、65%以上であり、磁性層の平均厚みは、80nm以下であり、磁気記録媒体の平均厚みは、5.6μm以下であり、磁性層にはサーボパターンが記録され、サーボパターンの非直線性を示す統計値σSWは、24nm以下である磁気記録媒体である。
第2の開示は、テープ状の磁気記録媒体であって、基体と、基体上に設けられた下地層と、下地層上に設けられた磁性層と、基体の下地層とは反対側の面に設けられたバック層とを備え、基体は、ポリエステルを含み、下地層および磁性層は、潤滑剤を含み、磁性層表面の算術平均粗さRaは、2.5nm以下であり、磁気記録媒体が洗浄、乾燥された状態において測定された、磁気記録媒体の全体のBET比表面積は、4.5m 2 /g以上7.0m 2 /g以下であり、磁性層の垂直方向における角形比は、65%以上であり、磁性層の平均厚みは、80nm以下であり、磁気記録媒体の平均厚みは、5.6μm以下であり、磁性層にはサーボパターンが記録され、サーボパターンの非直線性を示す統計値σ SW は、24nm以下である磁気記録媒体である。
In order to solve the above-mentioned problems, a first disclosure is a tape-shaped magnetic recording medium, which comprises a substrate, an underlayer provided on the substrate, a magnetic layer provided on the underlayer, and a substrate. And a back layer provided on the surface opposite to the underlayer , the substrate includes polyester, the average thickness of the substrate is 4.2 μm or less, and the underlayer and the magnetic layer include a lubricant. arithmetic average roughness Ra of the magnetic layer table surface is at 2.5nm or less, the magnetic recording medium is cleaned, was measured in a dry state, the whole of the BET specific surface area of the magnetic recording medium is 3.5 m 2 / g or more and 7.0 m 2 /g or less, the squareness ratio of the magnetic layer in the vertical direction is 65% or more, the average thickness of the magnetic layer is 80 nm or less, and the average thickness of the magnetic recording medium is 5. The magnetic recording medium has a thickness of 6 μm or less, a servo pattern is recorded on the magnetic layer, and a statistical value σ SW indicating the nonlinearity of the servo pattern is 24 nm or less.
A second disclosure is a tape-shaped magnetic recording medium, comprising a substrate, an underlayer provided on the substrate, a magnetic layer provided on the underlayer, and a surface of the substrate opposite to the underlayer. The backing layer provided on the magnetic recording medium, the substrate containing polyester, the underlayer and the magnetic layer containing a lubricant, and the arithmetic average roughness Ra of the surface of the magnetic layer is 2.5 nm or less. The BET specific surface area of the entire magnetic recording medium measured in the washed and dried state is 4.5 m 2 /g or more and 7.0 m 2 /g or less, and the squareness ratio of the magnetic layer in the perpendicular direction is 65% or more, the average thickness of the magnetic layer is 80 nm or less, the average thickness of the magnetic recording medium is 5.6 μm or less, the servo pattern is recorded on the magnetic layer, and the nonlinearity of the servo pattern is reduced. The statistical value σ SW shown is a magnetic recording medium of 24 nm or less.
第3の開示は、第1または第2の開示の磁気記録媒体と、磁気記録媒体の長手方向にかかるテンションを調整するための調整情報を書き込む領域を有する記憶部とを備えるカートリッジである。 A third disclosure is a cartridge including the magnetic recording medium of the first or second disclosure, and a storage unit having an area for writing adjustment information for adjusting a tension applied in the longitudinal direction of the magnetic recording medium.
本開示の実施形態について以下の順序で説明する。なお、以下の実施形態の全図においては、同一または対応する部分には同一の符号を付す。
1 第1の実施形態
2 第2の実施形態
3 変形例
The embodiments of the present disclosure will be described in the following order. In all the drawings of the following embodiments, the same or corresponding parts are designated by the same reference numerals.
1 1st Embodiment 2 2nd Embodiment 3 Modification
<1 第1の実施形態>
[記録再生システムの構成]
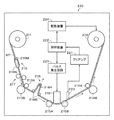
図1は、本開示の第1の実施形態に係る記録再生システム100の構成の一例を示す概略図である。記録再生システム100は、磁気テープ記録再生システムであり、カートリッジ10と、カートリッジ10をロードおよびアンロード可能に構成された記録再生装置50とを備える。
<1 First Embodiment>
[Structure of recording/playback system]
FIG. 1 is a schematic diagram showing an example of the configuration of a recording/reproducing
[カートリッジの構成]
図2は、カートリッジ10の構成の一例を示す分解斜視図である。カートリッジ10は、LTO(Linear Tape-Open)規格に準拠した磁気テープカートリッジであり、下シェル12Aと上シェル12Bとで構成されるカートリッジケース12の内部に、磁気テープ(テープ状の磁気記録媒体)MTが巻かれたリール13と、リール13の回転をロックするためのリールロック14およびリールスプリング15と、リール13のロック状態を解除するためのスパイダ16と、下シェル12Aと上シェル12Bに跨ってカートリッジケース12に設けられたテープ引出口12Cを開閉するスライドドア17と、スライドドア17をテープ引出口12Cの閉位置に付勢するドアスプリング18と、誤消去を防止するためのライトプロテクト19と、カートリッジメモリ11とを備える。リール13は、中心部に開口を有する略円盤状であって、プラスチック等の硬質の材料からなるリールハブ13Aとフランジ13Bとにより構成される。磁気テープMTの一端部には、リーダーピン20が設けられている。
[Cartridge configuration]
FIG. 2 is an exploded perspective view showing an example of the configuration of the
カートリッジメモリ11は、カートリッジ10の1つの角部の近傍に設けられている。カートリッジ10が記録再生装置50にロードされた状態において、カートリッジメモリ11は、記録再生装置50のリーダライタ57と対向するようになっている。カートリッジメモリ11は、LTO規格に準拠した無線通信規格で記録再生装置50、具体的にはリーダライタ57と通信を行う。
The
[カートリッジメモリの構成]
図3は、カートリッジメモリ11の構成の一例を示すブロック図である。カートリッジメモリ11は、規定の通信規格でリーダライタ57と通信を行うアンテナコイル(通信部)31と、アンテナコイル31により受信した電波から、誘導起電力を用いて発電、整流して電源を生成する整流・電源回路32と、アンテナコイル31により受信した電波から、同じく誘導起電力を用いてクロックを生成するクロック回路33と、アンテナコイル31により受信した電波の検波およびアンテナコイル31により送信する信号の変調を行う検波・変調回路34と、検波・変調回路34から抽出されるデジタル信号から、コマンドおよびデータを判別し、これを処理するための論理回路等で構成されるコントローラ(制御部)35と、情報を記憶するメモリ(記憶部)36とを備える。また、カートリッジメモリ11は、アンテナコイル31に対して並列に接続されたキャパシタ37を備え、アンテナコイル31とキャパシタ37により共振回路が構成される。
[Cartridge memory configuration]
FIG. 3 is a block diagram showing an example of the configuration of the
メモリ36は、カートリッジ10に関連する情報等を記憶する。メモリ36は、不揮発性メモリ(Non Volatile Memory:NVM)である。メモリ36の記憶容量は、好ましくは約32KB以上である。
The
メモリ36は、第1の記憶領域36Aと第2の記憶領域36Bとを有する。第1の記憶領域36Aは、LTO8以前のLTO規格のカートリッジメモリ(以下「従来のカートリッジメモリ」という。)の記憶領域に対応しており、LTO8以前のLTO規格に準拠した情報を記憶するための領域である。LTO8以前のLTO規格に準拠した情報は、例えば製造情報(例えばカートリッジ10の固有番号等)、使用履歴(例えばテープ引出回数(Thread Count)等)等である。
The
第2の記憶領域36Bは、従来のカートリッジメモリの記憶領域に対する拡張記憶領域に相当する。第2の記憶領域36Bは、付加情報を記憶するための領域である。ここで、付加情報とは、LTO8以前のLTO規格で規定されていない、カートリッジ10に関連する情報を意味する。付加情報の例としては、テンション調整情報、管理台帳データ、Index情報、または磁気テープMTに記憶された動画のサムネイル情報等が挙げられるが、これらのデータに限定されるものではない。テンション調整情報は、磁気テープMTの長手方向にかかるテンションを調整するための情報である。テンション調整情報は、磁気テープMTに対するデータ記録時における、隣接するサーボバンド間の距離(隣接するサーボバンドに記録されたサーボパターン間の距離)を含む。隣接するサーボバンド間の距離は、磁気テープMTの幅に関連する幅関連情報の一例である。サーボバンド間の距離の詳細については後述する。以下の説明において、第1の記憶領域36Aに記憶される情報を「第1の情報」といい、第2の記憶領域36Bに記憶される情報を「第2の情報」ということがある。
The
メモリ36は、複数のバンクを有していてもよい。この場合、複数のバンクうちの一部のバンクにより第1の記憶領域36Aが構成され、残りのバンクにより第2の記憶領域36Bが構成されてもよい。
The
アンテナコイル31は、電磁誘導により誘起電圧を誘起する。コントローラ35は、アンテナコイル31を介して、規定の通信規格で記録再生装置50と通信を行う。具体的には例えば、相互認証、コマンドの送受信またはデータのやり取り等を行う。
The antenna coil 31 induces an induced voltage by electromagnetic induction. The
コントローラ35は、アンテナコイル31を介して記録再生装置50から受信した情報をメモリ36に記憶する。例えば、アンテナコイル31を介して記録再生装置50から受信したテンション調整情報をメモリ36の第2の記憶領域36Bに記憶する。コントローラ35は、記録再生装置50の要求に応じて、メモリ36から情報を読み出し、アンテナコイル31を介して記録再生装置50に送信する。例えば、記録再生装置50の要求に応じて、メモリ36の第2の記憶領域36Bからテンション調整情報を読み出し、アンテナコイル31を介して記録再生装置50に送信する。
The
[磁気テープの構成]
図4は、磁気テープMTの構成の一例を示す断面図である。磁気テープMTは、テープ状の磁気記録媒体であり、長尺状の基体41と、基体41の一方の主面(第1の主面)上に設けられた下地層42と、下地層42上に設けられた磁性層43と、基体41の他方の主面(第2の主面)上に設けられたバック層44とを備える。なお、下地層42およびバック層44は、必要に応じて備えられるものであり、無くてもよい。磁気テープMTは、垂直記録型の磁気記録媒体であってもよいし、長手記録型の磁気記録媒体であってもよい。
[Structure of magnetic tape]
FIG. 4 is a sectional view showing an example of the structure of the magnetic tape MT. The magnetic tape MT is a tape-shaped magnetic recording medium, and includes a
磁気テープMTは長尺のテープ状を有し、記録再生の際には長手方向に走行される。なお、磁性層43の表面が、記録再生装置50が備える磁気ヘッド56が走行される表面となる。磁気テープMTは、記録用ヘッドとしてリング型ヘッドを備える記録再生装置で用いられることが好ましい。磁気テープMTは、1500nm以下または1000nm以下のデータトラック幅でデータを記録可能に構成された記録再生装置に用いられることが好ましい。
The magnetic tape MT has a long tape shape and is run in the longitudinal direction during recording and reproduction. The surface of the
(基体)
基体41は、下地層42および磁性層43を支持する非磁性支持体である。基体41は、長尺のフィルム状を有する。基体41の平均厚みの上限値は、好ましくは4.2μm以下、より好ましくは3.8μm以下、さらにより好ましくは3.4μm以下である。基体41の平均厚みの上限値が4.2μm以下であると、1データカートリッジ内に記録できる記録容量を一般的な磁気テープよりも高めることができる。基体41の平均厚みの下限値は、好ましくは3μm以上、より好ましくは3.2μm以上である。基体41の平均厚みの下限値が3μm以上であると、基体41の強度低下を抑制することができる。
(Base)
The
基体41の平均厚みは以下のようにして求められる。まず、1/2インチ幅の磁気テープMTを準備し、それを250mmの長さに切り出し、サンプルを作製する。続いて、サンプルの基体41以外の層(すなわち下地層42、磁性層43およびバック層44)をMEK(メチルエチルケトン)または希塩酸等の溶剤で除去する。次に、測定装置としてMitutoyo社製レーザーホロゲージ(LGH-110C)を用いて、サンプル(基体41)の厚みを5点以上の位置で測定し、それらの測定値を単純に平均(算術平均)して、基体41の平均厚みを算出する。なお、測定位置は、サンプルから無作為に選ばれるものとする。
The average thickness of the
基体41は、ポリエステルを含む。基体41がポリエステルを含むことで、基体41の長手方向のヤング率を低減することができる。したがって、走行時における磁気テープMTの長手方向のテンションを記録再生装置50により調整することで、磁気テープMTの幅を一定またはほぼ一定に保つことができる。
The
ポリエステルは、例えば、ポリエチレンテレフタレート(PET)、ポリエチレンナフタレート(PEN)、ポリブチレンテレフタレート(PBT)、ポリブチレンナフタレート(PBN)、ポリシクロヘキシレンジメチレンテレフタレート(PCT)、ポリエチレン−p−オキシベンゾエート(PEB)およびポリエチレンビスフェノキシカルボキシレートのうちの少なくとも1種を含む。基体41が2種以上のポリエステルを含む場合、それらの2種以上のポリエステルは混合されていてもよいし、共重合されていてもよいし、積層されていてもよい。ポリエステルの末端および側鎖の少なくとも一方が変性されていてもよい。
Examples of the polyester include polyethylene terephthalate (PET), polyethylene naphthalate (PEN), polybutylene terephthalate (PBT), polybutylene naphthalate (PBN), polycyclohexylene dimethylene terephthalate (PCT), and polyethylene-p-oxybenzoate ( PEB) and at least one of polyethylene bisphenoxycarboxylate. When the
基体41にポリエステルが含まれていることは、例えば、次のようにして確認される。まず、基体41の平均厚みの測定方法と同様にして、サンプルの基体41以外の層を除去する。次に、赤外吸収分光法(Infrared Absorption Spectrometry:IR)によりサンプル(基体41)のIRスペクトルを取得する。このIRスペクトルに基づき、基体41にポリエステルが含まれていることを確認することができる。
The fact that the
基体41は、ポリエステル以外に、例えば、ポリアミド、ポリイミドおよびポリアミドイミドのうちの少なくとも1種をさらに含んでいてもよいし、ポリアミド、ポリイミド、ポリアミドイミド、ポリオレフィン類、セルロース誘導体、ビニル系樹脂、およびその他の高分子樹脂のうちの少なくとも1種をさらに含んでいてもよい。ポリアミドは、芳香族ポリアミド(アラミド)であってもよい。ポリイミドは、芳香族ポリイミドであってもよい。ポリアミドイミドは、芳香族ポリアミドイミドであってもよい。
The
基体41が、ポリエステル以外の高分子樹脂を含む場合、基体41はポリエステルを主成分とすることが好ましい。ここで、主成分とは、基体41に含まれる高分子樹脂のうち、最も含有量(質量比率)が多い成分を意味する。基体41がポリエステル以外の高分子樹脂を含む場合、ポリエステルと、ポリエステル以外の高分子樹脂は、混合されていてもよいし、共重合されていてもよい。
When the
基体41は、長手方向および幅方向に二軸延伸されていてもよい。基体41に含まれる高分子樹脂は、基体41の幅方向に対して斜め方向に配向されていることが好ましい。
The
(磁性層)
磁性層43は、信号を磁化パターンにより記録するための記録層である。磁性層43は、垂直記録型の記録層であってもよいし、長手記録型の記録層であってもよい。磁性層43は、例えば、磁性粉、結着剤および潤滑剤を含む。磁性層43が、必要に応じて、帯電防止剤、研磨剤、硬化剤、防錆剤および非磁性補強粒子等のうちの少なくとも1種の添加剤をさらに含んでいてもよい。
(Magnetic layer)
The
磁性層43は、多数の孔部43Aが設けられた表面を有している。これらの多数の孔部43Aには、潤滑剤が蓄えられている。多数の孔部43Aは、磁性層43の表面に対して垂直方向に延設されていることが好ましい。磁性層43の表面に対する潤滑剤の供給性を向上することができるからである。なお、多数の孔部43Aの一部が垂直方向に延設されていてもよい。
The
磁性層43の表面の算術平均粗さRaは、2.5nm以下、好ましくは2.2nm以下、より好ましくは1.9nm以下である。算術平均粗さRaが2.5nm以下であると、スペーシングロスによる出力低下を抑制することができるため、優れた電磁変換特性を得ることができる。磁性層43の表面の算術平均粗さRaの下限値は、好ましくは1.0nm以上、より好ましくは1.2nm以上、さらにより好ましくは1.4nm以上である。磁性層43の表面の算術平均粗さRaの下限値が1.0nm以上であると、摩擦の増大による走行性の低下を抑制することができる。
The arithmetic average roughness Ra of the surface of the
算術平均粗さRaは次のようにして求められる。まず、磁性層43の表面をAFM(Atomic Force Microscope)により観察し、40μm×40μmのAFM像を得る。AFMとしてはDigital Instruments社製、Nano Scope IIIa D3100を用い、カンチレバーとしてはシリコン単結晶製のものを用い(注1)、タッピング周波数として、200〜400Hzのチューニングにて測定を行う。次に、AFM像を512×512(=262,144)個の測定点に分割し、各測定点にて高さZ(i)(i:測定点番号、i=1〜262,144)を測定し、測定した各測定点の高さZ(i)を単純に平均(算術平均)して平均高さ(平均面)Zave(=(Z(1)+Z(2)+・・・+Z(262,144))/262,144)を求める。続いて、各測定点での平均中心線からの偏差Z”(i)(=Z(i)−Zave)を求め、算術平均粗さRa[nm](=(Z”(1)+Z”(2)+・・・+Z”(262,144))/262,144)を算出する。この際には、画像処理として、Flatten order2、ならびに、planefit order 3 XYによりフィルタリング処理を行ったものをデータとして用いる。
(注1)Nano World社製 SPMプローブ NCH ノーマルタイプ PointProbe L(カンチレバー長)=125μm
The arithmetic average roughness Ra is obtained as follows. First, the surface of the
(Note 1) Nano World SPM probe NCH normal type PointProbe L (cantilever length) = 125 μm
磁気テープMTが洗浄、乾燥された状態において測定された、磁気テープMTの全体のBET比表面積の下限値は、3.5m2/g以上、好ましくは4m2/g以上、より好ましくは4.5m2/g以上、さらにより好ましくは5m2/g以上である。BET比表面積の下限値が3.5m2/g以上であると、繰り返し記録または再生を行った後にも(すなわち磁気ヘッド56を磁気テープMTの表面に接触させて繰り返し走行を行った後にも)、磁性層43の表面と磁気ヘッド56の間に対する潤滑剤の供給量の低下を抑制することができる。したがって、動摩擦係数の増加を抑制することができる。よって、優れた走行安定性を得ることができる。
The lower limit of the total BET specific surface area of the magnetic tape MT measured in a state where the magnetic tape MT is washed and dried is 3.5 m 2 /g or more, preferably 4 m 2 /g or more, more preferably 4. It is 5 m 2 /g or more, and more preferably 5 m 2 /g or more. When the lower limit of the BET specific surface area is 3.5 m 2 /g or more, even after repeated recording or reproduction (that is, even after the
磁気テープMTが洗浄、乾燥された状態において測定された、磁気テープMTの全体のBET比表面積の上限値は、7m2/g以下、好ましくは6m2/g以下、より好ましくは5.5m2/g以下である。BET比表面積の上限値が7m2/g以下であると、多数回走行後にも潤滑剤を枯渇することなく十分に供給できる。したがって、動摩擦係数の増加を抑制することができる。よって、優れた走行安定性を得ることができる。 The upper limit value of the entire BET specific surface area of the magnetic tape MT measured in a state where the magnetic tape MT is washed and dried is 7 m 2 /g or less, preferably 6 m 2 /g or less, more preferably 5.5 m 2 /G or less. When the upper limit value of the BET specific surface area is 7 m 2 /g or less, the lubricant can be sufficiently supplied without running out even after running many times. Therefore, an increase in the dynamic friction coefficient can be suppressed. Therefore, excellent running stability can be obtained.
磁気テープMTが洗浄、乾燥された状態において測定された、磁気テープMTの全体の平均細孔直径は、6nm以上11nm以下、好ましくは7nm以上10nm以下、より好ましくは7.5nm以上10nm以下である。平均細孔直径が6nm以上11nm以下であると、上述した動摩擦係数の増加を抑制する効果をさらに向上することができる。したがって、さらに優れた走行安定性を得ることができる。 The average pore diameter of the entire magnetic tape MT measured in a washed and dried state of the magnetic tape MT is 6 nm or more and 11 nm or less, preferably 7 nm or more and 10 nm or less, more preferably 7.5 nm or more and 10 nm or less. .. When the average pore diameter is 6 nm or more and 11 nm or less, the effect of suppressing the increase in the dynamic friction coefficient described above can be further improved. Therefore, more excellent running stability can be obtained.
磁気テープMTが洗浄、乾燥された状態において測定された、磁気テープMTの全体のBET比表面積および磁気テープMTの全体の細孔分布(細孔容積および平均細孔直径(脱着時最大細孔容積の細孔直径である))は以下のようにして求められる。まず、面積0.1265m2より1割程度大きいサイズの磁気テープMTをヘキサン中(磁気テープMTが十分に浸漬できる量、例えば、150mL)に24時間浸したのち、自然乾燥させ、面積0.1265m2(例えば、乾燥後の磁気テープMTの両端50cmを切り落とし、テープ幅×10mを準備する。)のサイズに切り出すことにより、測定サンプルを作製する。次に、比表面積・細孔分布測定装置を用いて、BET比表面積を求める。また、比表面積・細孔分布測定装置を用いて、BJH法により細孔分布(細孔容積および平均細孔直径)を求める。以下に、測定装置および測定条件を示す。このようにして、細孔の平均直径が測定される。
測定環境:室温
測定装置:Micromeritics社製3FLEX
測定吸着質:N2ガス
測定圧力範囲(P/P0(相対圧)):0〜0.995
前記測定圧力範囲に関して、圧力は以下の表1の通りに変化される。以下の表1における圧力値は相対圧P/P0である。以下の表1において、例えばステップ1において、開始圧0.000から到達圧0.010へ、10秒当たり0.001変化するように、圧力が変化される。圧力が到達圧に達したら、次のステップにおける圧力変化が行われる。ステップ2〜10においても同様である。ただし、各ステップにおいて、圧力が平衡に達していない場合は、装置は圧力が平衡になるのを待ってから次のステップに移行する。

Measuring environment: Room temperature Measuring device: 3FLEX manufactured by Micromeritics
Measured adsorbate: N 2 gas Measured pressure range (P/P 0 (relative pressure)): 0 to 0.995
For the measured pressure range, the pressure is varied as shown in Table 1 below. The pressure values in Table 1 below are relative pressures P/P 0 . In Table 1 below, for example, in step 1, the pressure is changed from the starting pressure of 0.000 to the ultimate pressure of 0.010 by 0.001 per 10 seconds. When the pressure reaches the ultimate pressure, the pressure change in the next step is performed. The same applies to steps 2 to 10. However, in each step, if the pressure does not reach equilibrium, the apparatus waits for the pressure to reach equilibrium before proceeding to the next step.
磁性層43は、図5に示すように、複数のサーボバンドSBと複数のデータバンドDBとを予め有している。複数のサーボバンドSBは、磁気テープMTの幅方向に等間隔で設けられている。隣り合うサーボバンドSBの間には、データバンドDBが設けられている。サーボバンドSBは、データの記録または再生時に磁気ヘッド56(具体的にはサーボリードヘッド56A、56B)をガイドするためのものである。サーボバンドSBには、磁気ヘッド56のトラッキング制御をするためのサーボパターン(サーボ信号)が予め書き込まれている。データバンドDBには、ユーザデータが記録される。
As shown in FIG. 5, the
磁性層43の表面の面積Sに対するサーボバンドSBの総面積SSBの割合RS(=(SSB/S)×100)の上限値は、高記録容量を確保する観点から、好ましくは4.0%以下、より好ましくは3.0%以下、さらにより好ましくは2.0%以下である。一方、磁性層43の表面の面積Sに対するサーボバンドSBの総面積SSBの割合RSの下限値は、5以上のサーボバンドSBを確保する観点から、好ましくは0.8%以上である。
The upper limit of the proportion of the total area S SB of the servo band SB R S (= (S SB / S) × 100) to the area S of the surface of the
磁性層43の表面全体の面積Sに対するサーボバンドSBの総面積SSBの比率RSは、以下のようにして求められる。磁気テープMTを、フェリコロイド現像液(株式会社シグマハイケミカル製、シグマーカーQ)を用いて現像し、その後、現像した磁気テープMTを光学顕微鏡で観察し、サーボバンド幅WSBおよびサーボバンドSBの本数を測定する。次に、以下の式から割合RSを求める。
割合RS[%]=(((サーボバンド幅WSB)×(サーボバンドSBの本数))/(磁気テープMTの幅))×100
The ratio R S of the total area S SB of the servo band SB to the area S of the entire surface of the
Ratio R S [%]=(((servo band width W SB )×(number of servo bands SB))/(width of magnetic tape MT))×100
サーボバンドSBの本数は、好ましくは5以上、より好ましくは5+4n(但し、nは正の整数である。)以上である。サーボバンドSBの本数が5以上であると、磁気テープMTの幅方向の寸法変化によるサーボ信号への影響を抑制し、よりオフトラックが少ない安定した記録再生特性を確保できる。サーボバンドSBの本数の上限値は特に限定されるものではないが、例えば33以下である。 The number of servo bands SB is preferably 5 or more, more preferably 5+4n (where n is a positive integer) or more. When the number of servo bands SB is 5 or more, the influence on the servo signal due to the dimension change of the magnetic tape MT in the width direction is suppressed, and stable recording/reproducing characteristics with less off-track can be secured. The upper limit of the number of servo bands SB is not particularly limited, but is 33 or less, for example.
サーボバンドSBの本数は、上記の比率RSの算出方法と同様にして求められる。 The number of servo bands SB is obtained in the same manner as the above-described method of calculating the ratio R S.
サーボバンド幅WSBの上限値は、高記録容量を確保する観点から、好ましくは95μm以下、より好ましくは60μm以下、さらにより好ましくは30μm以下である。サーボバンド幅WSBの下限値は、好ましくは10μm以上である。10μm未満のサーボバンド幅WSBのサーボ信号を読み取り可能な記録ヘッド56は製造が困難である。
The upper limit of the servo band width W SB, in order to ensure a high recording capacity, preferably 95μm or less, more preferably 60μm or less, even more preferably 30μm or less. The lower limit value of the servo bandwidth WSB is preferably 10 μm or more. It is difficult to manufacture the
サーボバンド幅WSBの幅は、上記の比率RSの算出方法と同様にして求められる。 The width of the servo band width W SB is obtained in the same manner as the above-described method of calculating the ratio R S.
磁性層43は、図6に示すように、データバンドDBに複数のデータトラックTkを形成可能に構成されている。データトラック幅Wの上限値は、トラック記録密度を向上し、高記録容量を確保する観点から、好ましくは2000nm以下、より好ましくは1500nm以下、さらにより好ましくは1000nm以下である。データトラック幅Wの下限値は、磁性粒子サイズを考慮すると、好ましくは20nm以上である。
As shown in FIG. 6, the
磁性層43は、高記録容量を確保する観点から、磁化反転間距離の最小値Lが好ましくは48nm以下、より好ましくは44nm以下、さらにより好ましくは40nm以下となるように、データを記録可能に構成されている。磁化反転間距離の最小値Lの下限値は、磁性粒子サイズを考慮すると、好ましくは20nm以上である。
From the viewpoint of ensuring a high recording capacity, the
磁性層43は、磁化反転間距離の最小値Lとデータトラック幅Wが好ましくはW/L≦35、より好ましくはW/L≦30、さらにより好もしくはW/L≦25となるように、データを記録可能に構成されている。磁化反転間距離の最小値Lが一定値であり、磁化反転間距離の最小値Lとトラック幅WがW/L>35であると(すなわちトラック幅Wが大きいと)、トラック記録密度が上がらないため、記録容量を十分に確保できなくなる虞がある。また、トラック幅Wが一定値であり、磁化反転間距離の最小値Lとトラック幅WがW/L>35であると(すなわち磁化反転間距離の最小値Lが小さいと)、ビット長さが小さくなり、線記録密度が上がるが、スペーシングロスの影響により、電磁変換特性(例えばSNR(Signal-to-Noise Ratio))が著しく悪化してしまう虞がある。したがって、記録容量を確保しながら、電磁変換特性(例えばSNR)の悪化を抑制するためには、上記のようにW/LがW/L≦35の範囲にあることが好ましい。W/Lの下限値は特に限定されるものではないが、例えば1≦W/Lである。
In the
データトラック幅Wは以下のようにして求められる。データが全面に記録された磁気テープMTを準備し、その磁性層43のデータバンドDB部分のデータ記録パターンを磁気力顕微鏡(Magnetic Force Microscope:MFM)を用いて観察し、MFM像を得る。MFMとしてはDigital Instruments社製Dimension3100とその解析ソフトが用いられる。当該MFM像の測定領域は10μm×10μmとし、当該10μm×10μmの測定領域は512×512(=262,144)個の測定点に分割される。場所の異なる3つの10μm×10μm測定領域についてMFMによる測定が行われ、すなわち3つのMFM像が得られる。得られた3つのMFM像から、Dimension3100に付属の解析ソフトを用いて、トラック幅を10ヶ所測定し平均値(単純平均である)をとる。当該平均値が、データトラック幅Wである。なお、上記MFMの測定条件は掃引速度:1Hz、使用チップ:MFMR−20、リフトハイト:20nm、補正:Flatten order 3である。
The data track width W is obtained as follows. A magnetic tape MT having data recorded on the entire surface is prepared, and the data recording pattern of the data band DB portion of the
磁化反転間距離の最小値Lは以下のようにして求められる。データが全面に記録された磁気テープMTを準備し、その磁性層43のデータバンドDB部分のデータ記録パターンを磁気力顕微鏡(Magnetic Force Microscope:MFM)を用いて観察し、MFM像を得る。MFMとしてはDigital Instruments社製Dimension3100とその解析ソフトが用いられる。当該MFM像の測定領域は2μm×2μmとし、当該2μm×2μmの測定領域は512×512(=262,144)個の測定点に分割される。場所の異なる3つの2μm×2μm測定領域についてMFMによる測定が行われ、すなわち3つのMFM像が得られる。得られたMFM像の記録パターンの二次元の凹凸チャートからビット間距離を50個測定する。当該ビット間距離の測定は、Dimension3100に付属の解析ソフトを用いて行われる。測定された50個のビット間距離のおよそ最大公約数となる値を磁化反転間距離Lの最小値とする。なお、測定条件は掃引速度:1Hz、使用チップ:MFMR−20、リフトハイト:20nm、補正:Flatten order 3である。
The minimum value L of the distance between magnetization reversals is obtained as follows. A magnetic tape MT having data recorded on the entire surface is prepared, and the data recording pattern of the data band DB portion of the
サーボパターンは、磁化領域であって、磁気テープ製造時にサーボライトヘッドにより磁性層43の特定の領域を特定方向に磁化することによって形成される。サーボバンドSBのうち、サーボパターンが形成されていない領域(以下「非パターン領域」という。)は、磁性層43が磁化された磁化領域であってもよいし、磁性層43が磁化されていない非磁化領域であってもよい。非パターン領域が磁化領域である場合、サーボパターン形成領域と非パターン領域とは、異なる方向(例えば逆方向)に磁化されている。
The servo pattern is a magnetized area and is formed by magnetizing a specific area of the
LTO規格では、サーボバンドSBには、図7に示すように、磁気テープMTの幅方向に対して傾斜した複数のサーボストライプ(線状の磁化領域)113からなるサーボパターンが形成されている。 According to the LTO standard, as shown in FIG. 7, a servo pattern including a plurality of servo stripes (linear magnetized regions) 113 inclined with respect to the width direction of the magnetic tape MT is formed in the servo band SB.
サーボバンドSBは、複数のサーボフレーム110を含んでいる。各サーボフレーム110は、18本のサーボストライプ113から構成されている。具体的には、各サーボフレーム110は、サーボサブフレーム1(111)およびサーボサブフレーム2(112)から構成される。
The servo band SB includes a plurality of servo frames 110. Each
サーボサブフレーム1(111)は、Aバースト111AおよびBバースト111Bから構成される。Bバースト111Bは、Aバースト111Aに隣接して配置されている。Aバースト111Aは、磁気テープMTの幅方向に対して所定角度φで傾斜し規定間隔隔てて形成された5本のサーボストライプ113を備えている。図7中では、これらの5本のサーボストライプ113に磁気テープMTのEOT(End Of Tape)からBOT(Beginning Of Tape)に向って符号A1、A2、A3、A4、A5を付して示している。Bバースト111Bは、Aバースト111Aと同様に、磁気テープMTの幅方向に対して所定角度φで傾斜し規定間隔隔てて形成された5本のサーボストライプ113を備えている。図7中では、これらの5本のサーボストライプ113に磁気テープMTのEOTからBOTに向って符号B1、B2、B3、B4、B5を付して示している。Bバースト111Bのサーボストライプ113は、Aバースト111Aのサーボストライプ113とは逆向きに傾斜している。すなわち、Aバースト111Aのサーボストライプ113とBバースト111Bのサーボストライプ113はハの字状に配置されている。
Servo subframe 1 (111) is composed of A
サーボサブフレーム2(112)は、Cバースト112CおよびDバースト112Dから構成される。Dバースト112Dは、Cバースト112Cに隣接して配置されている。Cバースト112Cは、テープ幅方向に対して所定角度φで傾斜し規定間隔隔てて形成された4本のサーボストライプ113を備えている。図7中では、これらの4本のサーボストライプ113に磁気テープMTのEOTからBOTに向って符号C1、C2、C3、C4を付して示している。Dバースト112Dは、Cバースト112Cと同様に、テープ幅方向に対して所定角度φで傾斜し規定間隔隔てて形成された4本のサーボストライプ113を備えている。図7中では、これらの4本のサーボストライプ113に磁気テープMTのEOTからBOTに向って符号D1、D2、D3、D4を付して示している。Dバースト112Dのサーボストライプ113は、Cバースト112Cのサーボストライプ113とは逆向きに傾斜している。すなわち、Cバースト112Cのサーボストライプ113とDバースト112Dのサーボストライプ113はハの字状に配置されている。
Servo subframe 2 (112) is composed of C burst 112C and D burst 112D. The D burst 112D is arranged adjacent to the C burst 112C. The C burst 112C includes four
Aバースト111A、Bバースト111B、Cバースト112C、Dバースト112Dにおけるサーボストライプ113の上記所定角度φは、例えば5°以上25°以下であり、特には11°以上25°以下でありうる。
The predetermined angle φ of the
サーボバンドSBを磁気ヘッド56で読み取りことにより、テープ速度および磁気ヘッドの縦方向の位置を取得するための情報が得られる。テープ速度は、4つのタイミング信号(A1−C1、A2−C2、A3−C3、A4−C4)間の時間から計算される。ヘッド位置は、前述の4つのタイミング信号間の時間および別の4つのタイミング信号(A1−B1、A2−B2、A3−B3、A4−B4)間の時間から計算される。
By reading the servo band SB with the
図7に示すように、サーボパターン(すなわち複数のサーボストライプ113)は、磁気テープMTの長手方向に向って直線的に配列されていることが好ましい。すなわち、サーボバンドSBは、長手方向に直線状を有していることが好ましい。 As shown in FIG. 7, the servo patterns (that is, the plurality of servo stripes 113) are preferably linearly arranged in the longitudinal direction of the magnetic tape MT. That is, it is preferable that the servo band SB has a linear shape in the longitudinal direction.
サーボパターンの配列の非直線性(サーボバンドSBの非直線性)を示す統計値σSWが、24nm以下、好ましくは23nm以下、より好ましくは20nm以下、さらにより好ましくは15nm以下である。統計値σSWが24nm以下であると、サーボパターンが磁気テープMTの幅方向に振れることを抑制することができる。すなわち、優れた直線性を有するサーボパターンの配列(サーボバンドSB)を得ることができる。このため、磁気テープMT上のデータが書かれている位置に適切に磁気ヘッド56をサーボパターン(サーボバンドSB)によりガイドすることができるので、優れた走行安定性を得ることができる。したがって、データの読み込み時のエラーの発生を抑制することができる。
The statistical value σ SW indicating the non-linearity of the arrangement of the servo patterns (non-linearity of the servo band SB) is 24 nm or less, preferably 23 nm or less, more preferably 20 nm or less, still more preferably 15 nm or less. When the statistical value σ SW is 24 nm or less, it is possible to suppress the servo pattern from swinging in the width direction of the magnetic tape MT. That is, an array of servo patterns (servo band SB) having excellent linearity can be obtained. Therefore, the
サーボパターンの配列の非直線性(サーボバンドSBの非直線性)を示す統計値σSWは、走行安定性の向上の観点からすると、小さければ小さいほど好ましく、例えば0以上である。 The statistical value σ SW indicating the non-linearity of the arrangement of the servo patterns (non-linearity of the servo band SB) is preferably as small as possible from the viewpoint of improving running stability, and is, for example, 0 or more.
サーボバンドの非直線性を示す統計値σSWは、磁気テープMTの磁性層43の表面に記録されたサーボパターンを読み取るための磁気ヘッドを備えているテープ走行装置(Tape Transportation(Mountain Engineering II, Inc.))を用いて測定される。当該磁気ヘッドは、市販入手可能なLTO8フルハイトドライブに採用されているものであってよい。当該磁気ヘッドは、当該テープ走行装置に固定された状態で用いられる。
The statistical value σ SW indicating the non-linearity of the servo band is a tape running device (Tape Transportation (Mountain Engineering II, Tape Engineering) which has a magnetic head for reading a servo pattern recorded on the surface of the
当該テープ走行装置を用いて、磁気テープMTを、その磁性層43側の表面が当該磁気ヘッド表面上を摺動するように、2m/sで走行させる。当該磁気ヘッドの表面の読み取り素子を用いて、磁気テープMTのサーボパターンからサーボ信号の再生波形をデジタルオシロスコープを用いて読み出す。すなわち、磁気的なサーボパターンが電気的なサーボ信号に変換される。サーボ信号の再生波形を十分な精度で取得する為に、デジタルオシロスコープのサンプリングレートは1秒間に20,000,000個以上の速度で行うものとする。
Using the tape running device, the magnetic tape MT is run at 2 m/s so that the surface of the
1つのサーボバンドに記録されているサーボパターンを読み取るために、磁気テープMTの長手方向に並べて配置される2つの読み取り素子が用いられる。当該2つの読み取り素子は、LTO8フルハイトドライブに採用されている磁気ヘッドユニットに備えられているものである。当該2つの読み取り素子について、図8を参照しながら以下で説明する。 In order to read the servo pattern recorded in one servo band, two reading elements arranged side by side in the longitudinal direction of the magnetic tape MT are used. The two reading elements are included in the magnetic head unit used in the LTO8 full height drive. The two reading elements will be described below with reference to FIG.
図8は、当該磁気ヘッドユニットの模式図である。図8に示されるヘッドユニット300は、磁気テープMTの長手方向に沿って並べて配置される3つのヘッド部300A、300B、および300Cを有する。ヘッド部300Aは、2つのサーボヘッド320A1および320A2並びに複数の記録ヘッド340を有する。ヘッド部300A中のエリプシス様の点は、記録ヘッド340が並んでいることを意味する。ヘッド部300Bは、2つのサーボヘッド320B1および320B2並びに複数の再生ヘッド350を有する。ヘッド部300B中のエリプシス様の点は、再生ヘッド350が並んでいることを意味する。ヘッド部300Cは、2つのサーボヘッド320C1および320C2並びに複数の記録ヘッド340を有する。ヘッド部300C中のエリプシス様の点は、記録ヘッド340が並んでいることを意味する。
FIG. 8 is a schematic diagram of the magnetic head unit. The
上記統計値σSWを得るために用いられる上記2つの読み取り素子は、ヘッド部300Aに含まれるサーボヘッド320A1およびヘッド部300Bに含まれるサーボヘッド320B1のみである。他のサーボヘッドは用いられない。以下で、当該2つの読み取り素子のうち、巻き出し側の読み取り素子(サーボヘッド320A1)を読み取り素子aといい、巻取り側の読み取り素子(サーボヘッド320B1)を読み取り素子bともいう。
The two reading elements used to obtain the statistical value σ SW are only the servo head 320A1 included in the
各読み取り素子によって得られたサーボ信号の再生波形をデジタルオシロスコープ等によって取得する。取得した其々のサーボ信号の再生波形に基づき、「サーボパターンの中心線と、サーボパターン上の読み取り素子の実通過位置との相対差p」を算出する。具体的には、得られたサーボ信号の再生波形の形状とサーボパターンそのものの形状とを用いて、相対差pが算出される。 The reproduced waveform of the servo signal obtained by each reading element is acquired by a digital oscilloscope or the like. The "relative difference p between the center line of the servo pattern and the actual passing position of the reading element on the servo pattern" is calculated based on the acquired reproduced waveform of each servo signal. Specifically, the relative difference p is calculated using the shape of the reproduced waveform of the obtained servo signal and the shape of the servo pattern itself.
相対差pは、以下の計算式により算出される。
相対差pの上記計算式について、図7を参照しながら以下で説明する。上記計算式中の上記差分(Ba1−Aa1)は、ストライプB1が読み取り素子aによって読み取られた時間とストライプA1が読み取り素子aによって読み取られた時間との間の差[sec]であり、ストライプA1に起因する信号ピークとストライプB1に起因する信号ピークとの間の間隔およびテープ走行速度(m/s)から求められる。当該2つの信号ピーク間の間隔は、上記得られたサーボ信号の再生波形の形状から求められる。上記差分(Ba1−Aa1)は、読み取り素子のサーボパターン上の実際の走行位置(図7におけるactual pass)における、両ストライプが読み取られるタイミングの差に相当する。同様に、他の差分の項も、対応する2つのストライプに起因する信号ピークの間隔とテープ走行速度とから求められる。また、読み取り素子bによって得られた信号ピークに基づき、同様に相対差pが算出される。 The above formula for calculating the relative difference p will be described below with reference to FIG. 7. The difference (B a1 −A a1 ) in the above formula is the difference [sec] between the time when the stripe B 1 is read by the reading element a and the time when the stripe A 1 is read by the reading element a. Yes, it is obtained from the interval between the signal peak due to the stripe A 1 and the signal peak due to the stripe B 1 and the tape running speed (m/s). The interval between the two signal peaks is obtained from the shape of the reproduced waveform of the servo signal obtained above. The difference (B a1 −A a1 ) corresponds to the difference between the timings at which both stripes are read at the actual traveling position (actual pass in FIG. 7) on the servo pattern of the reading element. Similarly, the other difference terms are obtained from the interval between the signal peaks caused by the corresponding two stripes and the tape running speed. Further, the relative difference p is similarly calculated based on the signal peak obtained by the reading element b.
上記サーボパターンそのものの形状から、上記計算式中のアジマス角φが求められる。アジマス角φは、磁気テープMTをフェリコロイド現像液(株式会社シグマハイケミカル製、シグマ―カーQ)で現像し、万能工具顕微鏡(TOPCON TUM-220ES)およびデータ処理装置(TOPCON CA-1B)を用いて求められる。また、上記サーボパターンそのものの形状から、サーボバンドの中心(図7におけるcenter line)におけるストライプA1とストライプB1との距離(図7および上記計算式におけるX)およびストライプA1とストライプC1との距離(図7および上記計算式におけるY)が求められる。テープ長さ方向の任意の箇所において、50個のサーボフレームを選択し、各々のサーボフレームにおいてXおよびYを求め、50個のデータを単純平均したものを、上記計算式において用いるXおよびYとする。 The azimuth angle φ in the above equation can be obtained from the shape of the servo pattern itself. For the azimuth angle φ, the magnetic tape MT is developed with a ferri colloid developer (Sigma High Chemical Co., Sigma Car Q), and a universal tool microscope (TOPCON TUM-220ES) and data processor (TOPCON CA-1B) are used. Required by using. From the shape of the servo pattern itself, the distance between the stripe A 1 and the stripe B 1 (X in the calculation formula in FIG. 7) at the center of the servo band (center line in FIG. 7) and the stripes A 1 and C 1 And the distance (Y in FIG. 7 and the above calculation formula) are obtained. Fifty servo frames are selected at arbitrary points in the tape length direction, X and Y are calculated in each servo frame, and a simple average of 50 data is used as X and Y in the above calculation formula. To do.
相対差pが、磁気テープMTの長手方向に沿って、連続する1024個のサーボサブフレームについてそれぞれ算出される。すなわち、1024個の相対差pが取得される。例えばサーボサブフレームの間隔が76μmである場合は、76μm毎に相対差pが取得される。読み取り素子aにより読み取られたサーボ信号に基づき算出された1024個の相対差pを、pa0、pa1、・・・、およびpa1023という。読み取り素子bにより読み取られたサーボ信号に基づき算出された1024個の相対差pを、pb0、pb1、・・・、およびpb1023という。 The relative difference p is calculated for each of 1024 continuous servo sub-frames along the longitudinal direction of the magnetic tape MT. That is, 1024 relative differences p are acquired. For example, when the interval between the servo sub-frames is 76 μm, the relative difference p is acquired every 76 μm. The 1024 relative differences p calculated based on the servo signals read by the reading element a are referred to as pa 0 , pa 1 ,..., And pa 1023 . The 1024 relative differences p calculated based on the servo signals read by the reading element b are referred to as pb 0 , pb 1 ,..., And pb 1023 .
当該磁気ヘッドに対する磁気テープMTの幅方向の動きによる影響を除去するために、各位置nにおけるpaとpbの差を演算し、Δpとする。すなわち、Δpn=pan−pbnである。ここで、n=0、1、・・・、および1023である。得られたΔpnに対し、離散FFT(フーリエ変換)を行い、ΔPn(n=0・・・1023)、すなわちΔP(f)(ここで、f=波数[cycle/m]である)を得る。ここで、ΔPnのDC成分(すなわちn=0)、換言すればΔP(∞)、を除去する為に、ΔP0を例えば10-100等、ほぼ0に近い数値に置換する。 In order to eliminate the influence of the movement of the magnetic tape MT in the width direction on the magnetic head, the difference between pa and pb at each position n is calculated and is set to Δp. That is, Δp n = pa n -pb n. Here, n=0, 1,..., And 1023. A discrete FFT (Fourier transform) is performed on the obtained Δp n to obtain ΔP n (n=0...1023), that is, ΔP(f) (where f=wavenumber [cycle/m]). obtain. Here, in order to remove the DC component of ΔP n (that is, n=0), in other words, ΔP(∞), ΔP 0 is replaced with a value close to 0 , such as 10 −100 .
また、ΔP(f)の単位が[nm2/Hz]となる様に上記FFTを行うものとする。
ΔP(f)を得るプロセスを、磁気テープMTの長手方向500m以上に渡って繰り返し、ΔP(f)1・・・ΔP(f)mを得る。測定ノイズを除去する為、ΔP(f)1・・・ΔP(f)mを周波数軸上で平均化し、ΔP(f)aveを得る。この後、上記の変位差の、実際のドライブ中での挙動WIP(f)を見積る為、ΔP(f)aveに対し、一般的な2次閉ループ応答のフィルターCLF(f)を作用させる。すなわち、WIP(f)=|CLF(f)|2×ΔP(f)aveである。CLF(f)については後述する。
Further, the FFT is performed so that the unit of ΔP(f) is [nm 2 /Hz].
The process of obtaining ΔP(f) is repeated over 500 m or more in the longitudinal direction of the magnetic tape MT to obtain ΔP(f) 1 ... ΔP(f) m . In order to remove measurement noise, ΔP(f) 1 ... ΔP(f) m are averaged on the frequency axis to obtain ΔP(f) ave . After that, in order to estimate the behavior WIP(f) of the displacement difference in the actual drive, a general second-order closed-loop response filter CLF(f) is applied to ΔP(f) ave . That is, WIP(f)=|CLF(f)| 2 ×ΔP(f) ave . CLF(f) will be described later.
上記WIP(f)を用い、下記式(1)の演算を行う事で、σSWを得る。下記演算におけるdfについても後述する。
一般的な2次閉ループ応答CLF(s)は、下式(2)で表すことができる。
双一次Z変換を用いることによって、CLF(z)は下式(3)で表すことができる。
z=ejωTs、および、ω=2πfの関係から、CLF(f)は下式(4)で表すことができる。
以上の式中の各項の意味はそれぞれ以下の通りである。
磁性層43の平均厚みtmの上限値は、80nm以下、好ましくは70nm以下、より好ましくは50nm以下である。磁性層43の平均厚みtmの上限値が80nm以下であると、記録ヘッドとしてはリング型ヘッドを用いた場合に、反磁界の影響を軽減できるため、さらに優れた電磁変換特性を得ることができる。
The upper limit of the average thickness t m of the
磁性層43の平均厚みtmの下限値は、好ましくは35nm以上である。磁性層43の平均厚みtmの下限値が35nm以上であると、再生ヘッドとしてはMR型ヘッドを用いた場合に、出力を確保できるため、さらに優れた電磁変換特性を得ることができる。
The lower limit of the average thickness t m of the
磁性層43の平均厚みtmは以下のようにして求められる。まず、測定対象となる磁気テープMTをFIB法等により加工して薄片化を行う。FIB法を使用する場合には、後述の断面のTEM像を観察する前処理として、保護膜としてカーボン層およびタングステン層を形成する。当該カーボン層は蒸着法により磁気テープMTの磁性層43側の表面およびバック層44側の表面に形成され、そして、当該タングステン層は蒸着法またはスパッタリング法により磁性層43側の表面にさらに形成される。当該薄片化は磁気テープMTの長さ方向(長手方向)に沿って行われる。すなわち、当該薄片化によって、磁気テープMTの長手方向および厚み方向の両方に平行な断面が形成される。
The average thickness t m of the
得られた薄片化サンプルの上記断面を、透過型電子顕微鏡(Transmission Electron Microscope:TEM)により、下記の条件で観察し、TEM像を得る。なお、装置の種類に応じて、倍率および加速電圧は適宜調整されてよい。
装置:TEM(日立製作所製H9000NAR)
加速電圧:300kV
倍率:100,000倍
The above cross section of the obtained sliced sample is observed under a transmission electron microscope (TEM) under the following conditions to obtain a TEM image. Note that the magnification and the acceleration voltage may be appropriately adjusted according to the type of device.
Device: TEM (Hitachi H9000NAR)
Accelerating voltage: 300kV
Magnification: 100,000 times
次に、得られたTEM像を用い、磁気テープMTの長手方向の少なくとも10点以上の位置で磁性層43の厚みを測定する。得られた測定値を単純に平均(算術平均)して得られた平均値を磁性層43の平均厚みtm[nm]とする。なお、上記測定が行われる位置は、試験片から無作為に選ばれるものとする。
Next, using the obtained TEM image, the thickness of the
(磁性粉)
磁性粉は、複数の磁性粒子を含む。磁性粒子は、例えば、六方晶フェライトを含む粒子(以下「六方晶フェライト粒子」という。)、イプシロン型酸化鉄(ε酸化鉄)を含む粒子(以下「ε酸化鉄粒子」という。)またはCo含有スピネルフェライトを含む粒子(以下「コバルトフェライト粒子」という。)である。磁性粉は、磁気テープMTの厚み方向(垂直方向)に優先的に結晶配向していることが好ましい。
(Magnetic powder)
The magnetic powder contains a plurality of magnetic particles. The magnetic particles include, for example, particles containing hexagonal ferrite (hereinafter referred to as “hexagonal ferrite particles”), particles containing epsilon-type iron oxide (ε iron oxide) (hereinafter referred to as “ε iron oxide particles”), or Co-containing particles. Particles containing spinel ferrite (hereinafter referred to as "cobalt ferrite particles"). It is preferable that the magnetic powder is preferentially crystallized in the thickness direction (vertical direction) of the magnetic tape MT.
(六方晶フェライト粒子)
六方晶フェライト粒子は、例えば、六角板状等の板状を有する。本明細書において、六角坂状は、ほぼ六角坂状を含むものとする。六方晶フェライトは、好ましくはBa、Sr、PbおよびCaのうちの少なくとも1種、より好ましくはBaおよびSrのうちの少なくとも1種を含む。六方晶フェライトは、具体的には例えばバリウムフェライトまたはストロンチウムフェライトであってもよい。バリウムフェライトは、Ba以外にSr、PbおよびCaのうちの少なくとも1種をさらに含んでいてもよい。ストロンチウムフェライトは、Sr以外にBa、PbおよびCaのうちの少なくとも1種をさらに含んでいてもよい。
(Hexagonal ferrite particles)
The hexagonal ferrite particles have a plate shape such as a hexagonal plate shape. In the present specification, the hexagonal slope shape includes almost hexagonal slope shape. The hexagonal ferrite preferably comprises at least one of Ba, Sr, Pb and Ca, more preferably at least one of Ba and Sr. The hexagonal ferrite may be, for example, barium ferrite or strontium ferrite. The barium ferrite may further contain at least one of Sr, Pb and Ca in addition to Ba. The strontium ferrite may further contain at least one of Ba, Pb, and Ca in addition to Sr.
より具体的には、六方晶フェライトは、一般式MFe12O19で表される平均組成を有する。但し、Mは、例えばBa、Sr、PbおよびCaのうちの少なくとも1種の金属、好ましくはBaおよびSrのうちの少なくとも1種の金属である。Mが、Baと、Sr、PbおよびCaからなる群より選ばれる1種以上の金属との組み合わせであってもよい。また、Mが、Srと、Ba、PbおよびCaからなる群より選ばれる1種以上の金属との組み合わせであってもよい。上記一般式においてFeの一部が他の金属元素で置換されていてもよい。 More specifically, the hexagonal ferrite has an average composition represented by the general formula MFe 12 O 19 . However, M is, for example, at least one metal selected from Ba, Sr, Pb, and Ca, and preferably at least one metal selected from Ba and Sr. M may be a combination of Ba and one or more metals selected from the group consisting of Sr, Pb and Ca. Further, M may be a combination of Sr and one or more metals selected from the group consisting of Ba, Pb and Ca. In the above general formula, part of Fe may be replaced with another metal element.
磁性粉が六方晶フェライト粒子粉を含む場合、磁性粉の平均粒子サイズは、好ましくは30nm以下、より好ましくは12nm以上25nm以下、さらにより好ましくは15nm以上22nm以下、特に好ましくは15nm以上20nm以下、最も好ましくは15nm以上18nm以下である。磁性粉の平均粒子サイズが30nm以下であると、高記録密度の磁気テープMTにおいて、さらに優れた電磁変換特性(例えばSNR)を得ることができる。一方、磁性粉の平均粒子サイズが12nm以上であると、磁性粉の分散性がより向上し、さらに優れた電磁変換特性(例えばSNR)を得ることができる。 When the magnetic powder includes hexagonal ferrite particle powder, the average particle size of the magnetic powder is preferably 30 nm or less, more preferably 12 nm or more and 25 nm or less, even more preferably 15 nm or more and 22 nm or less, particularly preferably 15 nm or more and 20 nm or less, Most preferably, it is 15 nm or more and 18 nm or less. When the average particle size of the magnetic powder is 30 nm or less, more excellent electromagnetic conversion characteristics (for example, SNR) can be obtained in the high recording density magnetic tape MT. On the other hand, when the average particle size of the magnetic powder is 12 nm or more, the dispersibility of the magnetic powder is further improved, and more excellent electromagnetic conversion characteristics (for example, SNR) can be obtained.
磁性粉の平均アスペクト比が、好ましくは1.0以上2.5以下、より好ましくは1.0以上2.1以下、さらにより好ましくは1.0以上1.8以下である。磁性粉の平均アスペクト比が1.0以上2.5以下の範囲内であると、磁性粉の凝集を抑制することができる。また、磁性層43の形成工程において磁性粉を垂直配向させる際に、磁性粉に加わる抵抗を抑制することができる。したがって、磁性粉の垂直配向性を向上することができる。
The average aspect ratio of the magnetic powder is preferably 1.0 or more and 2.5 or less, more preferably 1.0 or more and 2.1 or less, and even more preferably 1.0 or more and 1.8 or less. When the average aspect ratio of the magnetic powder is in the range of 1.0 or more and 2.5 or less, aggregation of the magnetic powder can be suppressed. Further, when the magnetic powder is vertically oriented in the process of forming the
磁性粉が六方晶フェライト粒子粉を含む場合、磁性粉の平均粒子サイズおよび平均アスペクト比は以下のようにして求められる。まず、測定対象となる磁気テープMTをFIB法等により加工して薄片化を行う。FIB法を使用する場合には、後述の断面のTEM像を観察する前処理として、保護膜としてカーボン層およびタングステン層を形成する。当該カーボン層は蒸着法により磁気テープMTの磁性層43側の表面およびバック層44側の表面に形成され、そして、当該タングステン層は蒸着法またはスパッタリング法により磁性層43側の表面にさらに形成される。当該薄片化は磁気テープMTの長さ方向(長手方向)に沿って行われる。すなわち、当該薄片化によって、磁気テープMTの長手方向および厚み方向の両方に平行な断面が形成される。
When the magnetic powder contains hexagonal ferrite particle powder, the average particle size and the average aspect ratio of the magnetic powder are determined as follows. First, the magnetic tape MT to be measured is processed into thin pieces by the FIB method or the like. When the FIB method is used, a carbon layer and a tungsten layer are formed as protective films as a pretreatment for observing a TEM image of a cross section described later. The carbon layer is formed on the
得られた薄片サンプルの上記断面を、透過電子顕微鏡(日立ハイテクノロジーズ社製 H-9500)を用いて、加速電圧:200kV、総合倍率500,000倍で磁性層43の厚み方向に対して磁性層43全体が含まれるように断面観察を行い、TEM写真を撮影する。次に、撮影したTEM写真から、観察面の方向に側面を向けており、且つ、粒子の厚みが明らかに確認できる粒子を50個選び出す。例えば、図9A、図9BにTEM写真の例を示す。図9A、図9Bにおいて、例えば矢印aおよびdで示される粒子が、その厚みを明らかに確認できるので、選択される。選択された50個の粒子それぞれの最大板厚DAを測定する。このようにして求めた最大板厚DAを単純に平均(算術平均)して平均最大板厚DAaveを求める。続いて、各磁性粉の板径DBを測定する。粒子の板径DBを測定するために、撮影したTEM写真から、粒子の板径が明らかに確認できる粒子を50個選び出す。例えば、図9A、図9Bにおいて、例えば矢印bおよびcで示される粒子が、その板径を明らかに確認できるので、選択される。選択された50個の粒子それぞれの板径DBを測定する。このようにして求めた板径DBを単純平均(算術平均)して平均板径DBaveを求める。平均板径DBaveが、平均粒子サイズである。そして、平均最大板厚DAaveおよび平均板径DBaveから粒子の平均アスペクト比(DBave/DAave)を求める。
Using a transmission electron microscope (H-9500 manufactured by Hitachi High-Technologies Corporation), the above cross section of the obtained thin sample was subjected to an acceleration voltage of 200 kV and an overall magnification of 500,000 times with respect to the thickness direction of the
磁性粉が六方晶フェライト粒子粉を含む場合、磁性粉の平均粒子体積は、好ましくは5900nm3以下、より好ましくは500nm3以上3400nm3以下、さらにより好ましくは1000nm3以上2500nm3以下、特に好ましくは1000nm3以上1800nm3以下、最も好ましくは1000nm3以上1500nm3以下である。磁性粉の平均粒子体積が5900nm3以下であると、磁性粉の平均粒子サイズを30nm以下とする場合と同様の効果が得られる。一方、磁性粉の平均粒子体積が500nm3以上であると、磁性粉の平均粒子サイズを12nm以上とする場合と同様の効果が得られる。 If the magnetic powder contains a hexagonal ferrite particles powder, average particle volume of the magnetic powder is preferably 5900Nm 3 or less, more preferably 500 nm 3 or more 3400 nm 3 or less, still more preferably 1000 nm 3 or more 2500 nm 3 or less, particularly preferably 1000 nm 3 or more 1800 nm 3 or less, and most preferably 1000 nm 3 or more 1500 nm 3 or less. When the average particle volume of the magnetic powder is 5900 nm 3 or less, the same effect as when the average particle size of the magnetic powder is 30 nm or less is obtained. On the other hand, when the average particle volume of the magnetic powder is 500 nm 3 or more, the same effect as when the average particle size of the magnetic powder is 12 nm or more is obtained.
磁性粉の平均粒子体積は以下のようにして求められる。まず、上記の磁性粉の平均粒子サイズの算出方法に関して述べた通り、平均長軸長DAaveおよび平均板径DBaveを求める。次に、以下の式により、磁性粉の平均体積Vを求める。
(ε酸化鉄粒子)
ε酸化鉄粒子は、微粒子でも高保磁力を得ることができる硬磁性粒子である。ε酸化鉄粒子は、球状を有しているか、または立方体状を有している。本明細書において、球状は、ほぼ球状を含むものとする。また、立方体状には、ほぼ立方体状を含むものとする。ε酸化鉄粒子が上記のような形状を有しているため、磁性粒子としてε酸化鉄粒子を用いた場合、磁性粒子として六角板状のバリウムフェライト粒子を用いた場合に比べて、磁気テープMTの厚み方向における粒子同士の接触面積を低減し、粒子同士の凝集を抑制することができる。したがって、磁性粉の分散性を高め、さらに優れた電磁変換特性(例えばSNR)を得ることができる。
(Ε iron oxide particles)
The ε iron oxide particles are hard magnetic particles that can obtain high coercive force even when they are fine particles. The ε iron oxide particles have a spherical shape or a cubic shape. In the present specification, the spherical shape includes almost spherical shape. In addition, the cubic shape includes almost a cubic shape. Since the ε iron oxide particles have the above-described shape, when the ε iron oxide particles are used as the magnetic particles, the magnetic tape MT can be used as compared with the case where the hexagonal plate-shaped barium ferrite particles are used as the magnetic particles. It is possible to reduce the contact area between the particles in the thickness direction and suppress the aggregation of the particles. Therefore, the dispersibility of the magnetic powder can be enhanced, and more excellent electromagnetic conversion characteristics (for example, SNR) can be obtained.
ε酸化鉄粒子は、コアシェル型構造を有する。具体的には、ε酸化鉄粒子は、コア部と、このコア部の周囲に設けられた2層構造のシェル部とを備える。2層構造のシェル部は、コア部上に設けられた第1シェル部と、第1シェル部上に設けられた第2シェル部とを備える。 The ε iron oxide particles have a core-shell structure. Specifically, the ε iron oxide particles include a core portion and a shell portion having a two-layer structure provided around the core portion. The shell part having a two-layer structure includes a first shell part provided on the core part and a second shell part provided on the first shell part.
コア部は、ε酸化鉄を含む。コア部に含まれるε酸化鉄は、ε−Fe2O3結晶を主相とするものが好ましく、単相のε−Fe2O3からなるものがより好ましい。 The core portion contains ε iron oxide. The ε iron oxide contained in the core portion preferably has ε-Fe 2 O 3 crystal as a main phase, and more preferably ε-Fe 2 O 3 in a single phase.
第1シェル部は、コア部の周囲のうちの少なくとも一部を覆っている。具体的には、第1シェル部は、コア部の周囲を部分的に覆っていてもよいし、コア部の周囲全体を覆っていてもよい。コア部と第1シェル部の交換結合を十分なものとし、磁気特性を向上する観点からすると、コア部の表面全体を覆っていることが好ましい。 The first shell portion covers at least a part of the periphery of the core portion. Specifically, the first shell portion may partially cover the periphery of the core portion or may cover the entire periphery of the core portion. From the viewpoint of making sufficient exchange coupling between the core portion and the first shell portion and improving the magnetic characteristics, it is preferable to cover the entire surface of the core portion.
第1シェル部は、いわゆる軟磁性層であり、例えば、α−Fe、Ni−Fe合金またはFe−Si−Al合金等の軟磁性体を含む。α−Feは、コア部に含まれるε酸化鉄を還元することにより得られるものであってもよい。 The first shell portion is a so-called soft magnetic layer, and includes, for example, a soft magnetic material such as α-Fe, Ni-Fe alloy, or Fe-Si-Al alloy. α-Fe may be obtained by reducing ε iron oxide contained in the core part.
第2シェル部は、酸化防止層としての酸化被膜である。第2シェル部は、α酸化鉄、酸化アルミニウムまたは酸化ケイ素を含む。α酸化鉄は、例えばFe3O4、Fe2O3およびFeOのうちの少なくとも1種の酸化鉄を含む。第1シェル部がα−Fe(軟磁性体)を含む場合には、α酸化鉄は、第1シェル部に含まれるα−Feを酸化することにより得られるものであってもよい。 The second shell portion is an oxide film as an antioxidant layer. The second shell portion contains α-iron oxide, aluminum oxide or silicon oxide. The α-iron oxide includes, for example, at least one iron oxide selected from Fe 3 O 4 , Fe 2 O 3 and FeO. When the first shell portion contains α-Fe (soft magnetic material), the α-iron oxide may be obtained by oxidizing α-Fe contained in the first shell portion.
ε酸化鉄粒子が、上述のように第1シェル部を有することで、熱安定性を確保するためにコア部単体の保磁力Hcを大きな値に保ちつつ、ε酸化鉄粒子(コアシェル粒子)全体としての保磁力Hcを記録に適した保磁力Hcに調整できる。また、ε酸化鉄粒子が、上述のように第2シェル部を有することで、磁気テープMTの製造工程およびその工程前において、ε酸化鉄粒子が空気中に暴露されて、粒子表面に錆び等が発生することにより、ε酸化鉄粒子の特性が低下することを抑制することができる。したがって、磁気テープMTの特性劣化を抑制することができる。 Since the ε iron oxide particles have the first shell portion as described above, the ε iron oxide particles (core shell particles) as a whole are maintained while maintaining a large coercive force Hc of the core portion alone to ensure thermal stability. Can be adjusted to a coercive force Hc suitable for recording. Further, since the ε iron oxide particles have the second shell portion as described above, the ε iron oxide particles are exposed to the air in the manufacturing process of the magnetic tape MT and before the process, and the surface of the particles is rusted or the like. It is possible to prevent the characteristics of the ε iron oxide particles from being deteriorated due to the occurrence of. Therefore, the characteristic deterioration of the magnetic tape MT can be suppressed.
ε酸化鉄粒子が単層構造のシェル部を有していてもよい。この場合、シェル部は、第1シェル部と同様の構成を有する。但し、ε酸化鉄粒子の特性劣化を抑制する観点からすると、上述したように、ε酸化鉄粒子が2層構造のシェル部を有していることが好ましい。 The ε iron oxide particles may have a shell portion having a single layer structure. In this case, the shell part has the same configuration as the first shell part. However, from the viewpoint of suppressing the characteristic deterioration of the ε iron oxide particles, as described above, it is preferable that the ε iron oxide particles have a shell portion having a two-layer structure.
ε酸化鉄粒子が、上記コアシェル構造に代えて添加剤を含んでいてもよいし、コアシェル構造を有すると共に添加剤を含んでいてもよい。この場合、ε酸化鉄粒子のFeの一部が添加剤で置換される。ε酸化鉄粒子が添加剤を含むことによっても、ε酸化鉄粒子全体としての保磁力Hcを記録に適した保磁力Hcに調整できるため、記録容易性を向上することができる。添加剤は、鉄以外の金属元素、好ましくは3価の金属元素、より好ましくはAl、GaおよびInのうちの少なくとも1種、さらにより好ましくはAlおよびGaのうちの少なくとも1種である。 The ε iron oxide particles may contain an additive instead of the core-shell structure, or may have an additive together with the core-shell structure. In this case, part of Fe in the ε iron oxide particles is replaced with the additive. Even if the ε iron oxide particles include the additive, the coercive force Hc of the ε iron oxide particles as a whole can be adjusted to a coercive force Hc suitable for recording, so that the ease of recording can be improved. The additive is a metal element other than iron, preferably a trivalent metal element, more preferably at least one of Al, Ga and In, and even more preferably at least one of Al and Ga.
具体的には、添加剤を含むε酸化鉄は、ε−Fe2-xMxO3結晶(但し、Mは鉄以外の金属元素、好ましくは3価の金属元素、より好ましくはAl、GaおよびInのうちの少なくとも1種、さらにより好ましくはAlおよびGaのうちの少なくとも1種である。xは、例えば0<x<1である。)である。 Specifically, ε-iron oxide containing an additive is an ε-Fe 2-x M x O 3 crystal (where M is a metal element other than iron, preferably a trivalent metal element, more preferably Al or Ga). And at least one of In and even more preferably at least one of Al and Ga. x is, for example, 0<x<1.
磁性粉の平均粒子サイズ(平均最大粒子サイズ)は、例えば22.5nm以下である。磁性粉の平均粒子サイズ(平均最大粒子サイズ)は、好ましくは22nm以下、より好ましくは8nm以上22nm以下、さらにより好ましくは12nm以上22nm以下、特に好ましくは12nm以上15nm以下、最も好ましくは12nm以上14nm以下である。磁気テープMTでは、記録波長の1/2のサイズの領域が実際の磁化領域となる。このため、磁性粉の平均粒子サイズを最短記録波長の半分以下に設定することで、さらに優れた電磁変換特性(例えばSNR)を得ることができる。したがって、磁性粉の平均粒子サイズが22nm以下であると、高記録密度の磁気テープMT(例えば44nm以下の最短記録波長で信号を記録可能に構成された磁気テープMT)において、さらに優れた電磁変換特性(例えばSNR)を得ることができる。一方、磁性粉の平均粒子サイズが8nm以上であると、磁性粉の分散性がより向上し、さらに優れた電磁変換特性(例えばSNR)を得ることができる。 The average particle size (average maximum particle size) of the magnetic powder is, for example, 22.5 nm or less. The average particle size (average maximum particle size) of the magnetic powder is preferably 22 nm or less, more preferably 8 nm or more and 22 nm or less, even more preferably 12 nm or more and 22 nm or less, particularly preferably 12 nm or more and 15 nm or less, most preferably 12 nm or more and 14 nm. It is as follows. In the magnetic tape MT, an area having a size of 1/2 the recording wavelength is the actual magnetized area. Therefore, by setting the average particle size of the magnetic powder to be half or less of the shortest recording wavelength, it is possible to obtain more excellent electromagnetic conversion characteristics (for example, SNR). Therefore, when the average particle size of the magnetic powder is 22 nm or less, a more excellent electromagnetic conversion is achieved in the high recording density magnetic tape MT (for example, the magnetic tape MT configured to record a signal at the shortest recording wavelength of 44 nm or less). A property (eg SNR) can be obtained. On the other hand, when the average particle size of the magnetic powder is 8 nm or more, the dispersibility of the magnetic powder is further improved, and more excellent electromagnetic conversion characteristics (for example, SNR) can be obtained.
磁性粉の平均アスペクト比が、好ましくは1.0以上3.0以下、より好ましくは1.0以上2.5以下、さらにより好ましくは1.0以上2.1以下、特に好ましくは1.0以上1.8以下である。磁性粉の平均アスペクト比が1.0以上3.0以下の範囲内であると、磁性粉の凝集を抑制することができる。また、磁性層43の形成工程において磁性粉を垂直配向させる際に、磁性粉に加わる抵抗を抑制することができる。したがって、磁性粉の垂直配向性を向上することができる。
The average aspect ratio of the magnetic powder is preferably 1.0 or more and 3.0 or less, more preferably 1.0 or more and 2.5 or less, still more preferably 1.0 or more and 2.1 or less, and particularly preferably 1.0. The above is 1.8 or less. When the average aspect ratio of the magnetic powder is in the range of 1.0 or more and 3.0 or less, aggregation of the magnetic powder can be suppressed. Further, when the magnetic powder is vertically oriented in the process of forming the
磁性粉がε酸化鉄粒子粉を含む場合、磁性粉の平均粒子サイズおよび平均アスペクト比は、以下のようにして求められる。まず、測定対象となる磁気テープMTをFIB(Focused Ion Beam)法等により加工して薄片化を行う。FIB法を使用する場合には、後述の断面のTEM像を観察する前処理として、保護層としてカーボン層およびタングステン層を形成する。当該カーボン層は蒸着法により磁気テープMTの磁性層43側の表面およびバック層44側の表面に形成され、そして、当該タングステン層は蒸着法またはスパッタリング法により磁性層43側の表面にさらに形成される。薄片化は磁気テープMTの長さ方向(長手方向)に沿うかたちで行って行われる。すなわち、当該薄片化によって、磁気テープMTの長手方向および厚み方向の両方に平行な断面が形成される。
When the magnetic powder contains ε iron oxide particle powder, the average particle size and the average aspect ratio of the magnetic powder are determined as follows. First, the magnetic tape MT to be measured is processed into thin pieces by processing by the FIB (Focused Ion Beam) method or the like. When the FIB method is used, a carbon layer and a tungsten layer are formed as protective layers as a pretreatment for observing a TEM image of a cross section described later. The carbon layer is formed on the
得られた薄片サンプルの上記断面を、透過電子顕微鏡(日立ハイテクノロジーズ社製 H-9500)を用いて、加速電圧:200kV、総合倍率500,000倍で磁性層43の厚み方向に対して磁性層43全体が含まれるように断面観察を行い、TEM写真を撮影する。次に、撮影したTEM写真から、粒子の形状を明らかに確認することができる50個の粒子を選び出し、各粒子の長軸長DLと短軸長DSを測定する。ここで、長軸長DLとは、各粒子の輪郭に接するように、あらゆる角度から引いた2本の平行線間の距離のうち最大のもの(いわゆる最大フェレ径)を意味する。一方、短軸長DSとは、粒子の長軸(DL)と直交する方向における粒子の長さのうち最大のものを意味する。続いて、測定した50個の粒子の長軸長DLを単純に平均(算術平均)して平均長軸長DLaveを求める。このようにして求めた平均長軸長DLaveを磁性粉の平均粒子サイズとする。また、測定した50個の粒子の短軸長DSを単純に平均(算術平均)して平均短軸長DSaveを求める。そして、平均長軸長DLaveおよび平均短軸長DSaveから粒子の平均アスペクト比(DLave/DSave)を求める。
Using a transmission electron microscope (H-9500 manufactured by Hitachi High-Technologies Corporation), the above cross section of the obtained thin sample was subjected to an acceleration voltage of 200 kV and an overall magnification of 500,000 times with respect to the thickness direction of the
磁性粉の平均粒子体積は、好ましくは5600nm3以下、より好ましくは250nm3以上5600nm3以下、さらにより好ましくは900nm3以上5600nm3以下、特に好ましくは900nm3以上1800nm3以下、最も好ましくは900nm3以上1500nm3以下である。一般的に磁気テープMTのノイズは粒子個数の平方根に反比例(すなわち粒子体積の平方根に比例)するため、粒子体積をより小さくすることで、さらに優れた電磁変換特性(例えばSNR)を得ることができる。したがって、磁性粉の平均粒子体積が5600nm3以下であると、磁性粉の平均粒子サイズを22nm以下とする場合と同様に、さらに優れた電磁変換特性(例えばSNR)を得ることができる。一方、磁性粉の平均粒子体積が250nm3以上であると、磁性粉の平均粒子サイズを8nm以上とする場合と同様の効果が得られる。 The average particle volume of the magnetic powder is preferably 5600Nm 3 or less, more preferably 250 nm 3 or more 5600Nm 3 or less, still more preferably 900 nm 3 or more 5600Nm 3 or less, particularly preferably 900 nm 3 or more 1800 nm 3 or less, and most preferably 900 nm 3 It is 1500 nm 3 or less. Generally, the noise of the magnetic tape MT is inversely proportional to the square root of the number of particles (that is, proportional to the square root of the particle volume). Therefore, by making the particle volume smaller, more excellent electromagnetic conversion characteristics (for example, SNR) can be obtained. it can. Therefore, when the average particle volume of the magnetic powder is 5600 nm 3 or less, more excellent electromagnetic conversion characteristics (for example, SNR) can be obtained as in the case where the average particle size of the magnetic powder is 22 nm or less. On the other hand, when the average particle volume of the magnetic powder is 250 nm 3 or more, the same effect as when the average particle size of the magnetic powder is 8 nm or more is obtained.
ε酸化鉄粒子が球状を有している場合には、磁性粉の平均粒子体積は以下のようにして求められる。まず、上記の磁性粉の平均粒子サイズの算出方法と同様にして、平均長軸長DLaveを求める。次に、以下の式により、磁性粉の平均体積Vを求める。
V=(π/6)×DLave 3
When the ε iron oxide particles have a spherical shape, the average particle volume of the magnetic powder is obtained as follows. First, the average major axis length DL ave is obtained in the same manner as the above-described method of calculating the average particle size of magnetic powder. Next, the average volume V of the magnetic powder is calculated by the following formula.
V=(π/6)×DL ave 3
ε酸化鉄粒子が立方体状を有している場合、磁性粉の平均体積は以下のようにして求められる。磁気テープMTをFIB(Focused Ion Beam)法等により加工して薄片化を行う。FIB法を使用する場合には、後述の断面のTEM像を観察する前処理として、保護膜としてカーボン膜およびタングステン薄膜を形成する。当該カーボン膜は蒸着法により磁気テープMTの磁性層43側の表面およびバック層44側の表面に形成され、そして、当該タングステン薄膜は蒸着法またはスパッタリング法により磁性層43側の表面にさらに形成される。当該薄片化は磁気テープMTの長さ方向(長手方向)に沿って行われる。すなわち、当該薄片化によって、磁気テープMTの長手方向および厚み方向の両方に平行な断面が形成される。
When the ε iron oxide particles have a cubic shape, the average volume of the magnetic powder is determined as follows. The magnetic tape MT is processed into thin pieces by processing by the FIB (Focused Ion Beam) method or the like. When the FIB method is used, a carbon film and a tungsten thin film are formed as protective films as a pretreatment for observing a TEM image of a cross section described later. The carbon film is formed on the
得られた薄片サンプルを透過電子顕微鏡(日立ハイテクノロジーズ社製 H-9500)を用いて、加速電圧:200kV、総合倍率500,000倍で磁性層43の厚み方向に対して磁性層43全体が含まれるように断面観察を行い、TEM写真を得る。なお、装置の種類に応じて、倍率および加速電圧は適宜調整されてよい。次に、撮影したTEM写真から粒子の形状が明らかである50個の粒子を選び出し、各粒子の辺の長さDCを測定する。続いて、測定した50個の粒子の辺の長さDCを単純に平均(算術平均)して平均辺長DCaveを求める。次に、平均辺長DCaveを用いて以下の式から磁性粉の平均体積Vave(粒子体積)を求める。
Vave=DCave 3
Using a transmission electron microscope (H-9500 manufactured by Hitachi High-Technologies Corp.), the obtained thin section sample has an accelerating voltage of 200 kV and a total magnification of 500,000 times so that the entire
V ave =DC ave 3
(コバルトフェライト粒子)
コバルトフェライト粒子は、一軸結晶異方性を有することが好ましい。コバルトフェライト粒子が一軸結晶異方性を有することで、磁性粉を磁気テープMTの厚み方向(垂直方向)に優先的に結晶配向させることができる。コバルトフェライト粒子は、例えば、立方体状を有している。本明細書において、立方体状は、ほぼ立方体状を含むものとする。Co含有スピネルフェライトが、Co以外にNi、Mn、Al、CuおよびZnのうちの少なくとも1種をさらに含んでいてもよい。
(Cobalt ferrite particles)
The cobalt ferrite particles preferably have uniaxial crystal anisotropy. Since the cobalt ferrite particles have uniaxial crystal anisotropy, the magnetic powder can be preferentially crystallized in the thickness direction (vertical direction) of the magnetic tape MT. The cobalt ferrite particles have, for example, a cubic shape. In the present specification, the cubic shape substantially includes a cubic shape. The Co-containing spinel ferrite may further contain at least one of Ni, Mn, Al, Cu and Zn in addition to Co.
Co含有スピネルフェライトは、例えば以下の式で表される平均組成を有する。
CoxMyFe2OZ
(但し、式中、Mは、例えば、Ni、Mn、Al、CuおよびZnのうちの少なくとも1種の金属である。xは、0.4≦x≦1.0の範囲内の値である。yは、0≦y≦0.3の範囲内の値である。但し、x、yは(x+y)≦1.0の関係を満たす。zは3≦z≦4の範囲内の値である。Feの一部が他の金属元素で置換されていてもよい。)
The Co-containing spinel ferrite has, for example, an average composition represented by the following formula.
Co x M y Fe 2 O Z
(In the formula, M is, for example, at least one metal selected from Ni, Mn, Al, Cu, and Zn. x is a value within the range of 0.4≦x≦1.0. Y is a value within the range of 0≦y≦0.3, where x and y satisfy the relationship of (x+y)≦1.0, and z is a value within the range of 3≦z≦4. Yes, part of Fe may be replaced with another metal element.)
磁性粉がコバルトフェライト粒子粉を含む場合、磁性粉の平均粒子サイズは、好ましくは25nm以下、より好ましくは8nm以上23nm以下、さらにより好ましくは8nm以上12nm以下、特に好ましくは8nm以上11nm以下である。磁性粉の平均粒子サイズが25nm以下であると、高記録密度の磁気テープMTにおいて、さらに優れた電磁変換特性(例えばSNR)を得ることができる。一方、磁性粉の平均粒子サイズが8nm以上であると、磁性粉の分散性がより向上し、さらに優れた電磁変換特性(例えばSNR)を得ることができる。磁性粉の平均粒子サイズの算出方法は、磁性粉がε酸化鉄粒子粉を含む場合における磁性粉の平均粒子サイズの算出方法と同様である。 When the magnetic powder contains cobalt ferrite particle powder, the average particle size of the magnetic powder is preferably 25 nm or less, more preferably 8 nm or more and 23 nm or less, still more preferably 8 nm or more and 12 nm or less, particularly preferably 8 nm or more and 11 nm or less. .. When the average particle size of the magnetic powder is 25 nm or less, more excellent electromagnetic conversion characteristics (for example, SNR) can be obtained in the high recording density magnetic tape MT. On the other hand, when the average particle size of the magnetic powder is 8 nm or more, the dispersibility of the magnetic powder is further improved, and more excellent electromagnetic conversion characteristics (for example, SNR) can be obtained. The method for calculating the average particle size of the magnetic powder is the same as the method for calculating the average particle size of the magnetic powder when the magnetic powder contains ε iron oxide particle powder.
磁性粉の平均アスペクト比が、好ましくは1.0以上3.0以下、より好ましくは1.0以上2.5以下、さらにより好ましくは1.0以上2.1以下、特に好ましくは1.0以上1.8以下である。磁性粉の平均アスペクト比が1.0以上3.0以下の範囲内であると、磁性粉の凝集を抑制することができる。また、磁性層43の形成工程において磁性粉を垂直配向させる際に、磁性粉に加わる抵抗を抑制することができる。したがって、磁性粉の垂直配向性を向上することができる。磁性粉の平均アスペクト比の算出方法は、磁性粉がε酸化鉄粒子粉を含む場合における磁性粉の平均アスペクト比の算出方法と同様である。
The average aspect ratio of the magnetic powder is preferably 1.0 or more and 3.0 or less, more preferably 1.0 or more and 2.5 or less, still more preferably 1.0 or more and 2.1 or less, and particularly preferably 1.0. The above is 1.8 or less. When the average aspect ratio of the magnetic powder is in the range of 1.0 or more and 3.0 or less, aggregation of the magnetic powder can be suppressed. Further, when the magnetic powder is vertically oriented in the process of forming the
磁性粉の平均粒子体積は、好ましくは15000nm3以下、より好ましくは500nm3以上12000nm3以下、特に好ましくは500nm3以上1800nm3以下、最も好ましくは500nm3以上1500nm3以下である。磁性粉の平均粒子体積が15000nm3以下であると、磁性粉の平均粒子サイズを25nm以下とする場合と同様の効果が得られる。一方、磁性粉の平均粒子体積が500nm3以上であると、磁性粉の平均粒子サイズを8nm以上とする場合と同様の効果が得られる。磁性分の平均粒子体積の算出方法は、ε酸化鉄粒子が立方体状を有している場合の平均粒子体積の算出方法と同様である。 The average particle volume of the magnetic powder is preferably 15000 nm 3 or less, more preferably 500 nm 3 or more 12000 nm 3 or less, particularly preferably 500 nm 3 or more 1800 nm 3 or less, and most preferably 500 nm 3 or more 1500 nm 3 or less. When the average particle volume of the magnetic powder is 15000 nm 3 or less, the same effect as when the average particle size of the magnetic powder is 25 nm or less is obtained. On the other hand, when the average particle volume of the magnetic powder is 500 nm 3 or more, the same effect as when the average particle size of the magnetic powder is 8 nm or more is obtained. The method for calculating the average particle volume of the magnetic component is the same as the method for calculating the average particle volume when the ε iron oxide particles have a cubic shape.
(結着剤)
結着剤としては、例えば、熱可塑性樹脂、熱硬化性樹脂、反応型樹脂等が挙げられる。熱可塑性樹脂としては、例えば、塩化ビニル、酢酸ビニル、塩化ビニル−酢酸ビニル共重合体、塩化ビニル−塩化ビニリデン共重合体、塩化ビニル−アクリロニトリル共重合体、アクリル酸エステル−アクリロニトリル共重合体、アクリル酸エステル−塩化ビニル−塩化ビニリデン共重合体、アクリル酸エステル−アクリロニトリル共重合体、アクリル酸エステル−塩化ビニリデン共重合体、メタクリル酸エステル−塩化ビニリデン共重合体、メタクリル酸エステル−塩化ビニル共重合体、メタクリル酸エステル−エチレン共重合体、ポリフッ化ビニル、塩化ビニリデン−アクリロニトリル共重合体、アクリロニトリル−ブタジエン共重合体、ポリアミド樹脂、ポリビニルブチラール、セルロース誘導体(セルロースアセテートブチレート、セルロースダイアセテート、セルローストリアセテート、セルロースプロピオネート、ニトロセルロース)、スチレンブタジエン共重合体、ポリウレタン樹脂、ポリエステル樹脂、アミノ樹脂、合成ゴム等が挙げられる。
(Binder)
Examples of the binder include thermoplastic resins, thermosetting resins, reactive resins, and the like. Examples of the thermoplastic resin include vinyl chloride, vinyl acetate, vinyl chloride-vinyl acetate copolymer, vinyl chloride-vinylidene chloride copolymer, vinyl chloride-acrylonitrile copolymer, acrylic ester-acrylonitrile copolymer, and acrylic. Acid ester-vinyl chloride-vinylidene chloride copolymer, acrylic acid ester-acrylonitrile copolymer, acrylic acid ester-vinylidene chloride copolymer, methacrylic acid ester-vinylidene chloride copolymer, methacrylic acid ester-vinyl chloride copolymer , Methacrylic acid ester-ethylene copolymer, polyvinyl fluoride, vinylidene chloride-acrylonitrile copolymer, acrylonitrile-butadiene copolymer, polyamide resin, polyvinyl butyral, cellulose derivative (cellulose acetate butyrate, cellulose diacetate, cellulose triacetate, Cellulose propionate, nitrocellulose), styrene-butadiene copolymer, polyurethane resin, polyester resin, amino resin, synthetic rubber and the like.
熱硬化性樹脂としては、例えば、フェノール樹脂、エポキシ樹脂、ポリウレタン硬化型樹脂、尿素樹脂、メラミン樹脂、アルキッド樹脂、シリコーン樹脂、ポリアミン樹脂、尿素ホルムアルデヒド樹脂等が挙げられる。 Examples of the thermosetting resin include phenol resin, epoxy resin, polyurethane curable resin, urea resin, melamine resin, alkyd resin, silicone resin, polyamine resin, urea formaldehyde resin and the like.
上記の全ての結着剤には、磁性粉の分散性を向上させる目的で、−SO3M、−OSO3M、−COOM、P=O(OM)2(但し、式中Mは水素原子またはリチウム、カリウム、ナトリウム等のアルカリ金属を表す)や、−NR1R2、−NR1R2R3+X-で表される末端基を有する側鎖型アミン、>NR1R2+X-で表される主鎖型アミン(但し、式中R1、R2、R3は水素原子または炭化水素基を表し、X-はフッ素、塩素、臭素、ヨウ素等のハロゲン元素イオン、無機イオンまたは有機イオンを表す。)、さらに−OH、−SH、−CN、エポキシ基等の極性官能基が導入されていてもよい。これら極性官能基の結着剤への導入量は、10-1〜10-8モル/gであるのが好ましく、10-2〜10-6モル/gであるのがより好ましい。 All of the binder described above, for the purpose of improving the dispersibility of the magnetic powder, -SO 3 M, -OSO 3 M , -COOM, P = O (OM) 2 ( where formula, M is a hydrogen atom or lithium, potassium, an alkali metal such as sodium) or, -NR1R2, -NR1R2R3 + X - side chain amine having a terminal group represented by,> NR1R2 + X - represented by main-chain amine ( However, in the formula, R1, R2, and R3 represent a hydrogen atom or a hydrocarbon group, X − represents a halogen element ion such as fluorine, chlorine, bromine, or iodine, an inorganic ion or an organic ion), and —OH or —. A polar functional group such as SH, —CN or an epoxy group may be introduced. The amount of these polar functional groups introduced into the binder is preferably 10 -1 to 10 -8 mol/g, more preferably 10 -2 to 10 -6 mol/g.
(潤滑剤)
潤滑剤は、例えば脂肪酸および脂肪酸エステルから選ばれる少なくとも1種、好ましくは脂肪酸および脂肪酸エステルの両方を含む。磁性層43が潤滑剤を含むことが、特には磁性層43が脂肪酸および脂肪酸エステルの両方を含むことが、磁気テープMTの走行安定性の向上に貢献する。より特には、磁性層43が潤滑剤を含み且つ細孔を有することによって、良好な走行安定性が達成される。当該走行安定性の向上は、磁気テープMTの磁性層43側表面の動摩擦係数が上記潤滑剤により、磁気テープMTの走行に適した値へ調整されるためと考えられる。
(lubricant)
The lubricant contains, for example, at least one selected from fatty acids and fatty acid esters, preferably both fatty acids and fatty acid esters. The fact that the
脂肪酸は、好ましくは下記の一般式(1)または(2)により示される化合物であってよい。例えば、脂肪酸として下記の一般式(1)により示される化合物および一般式(2)により示される化合物の一方が含まれていてよく、または両方が含まれていてもよい。 The fatty acid may preferably be a compound represented by the following general formula (1) or (2). For example, one of the compound represented by the following general formula (1) and the compound represented by the following general formula (2) may be contained as the fatty acid, or both may be contained.
また、脂肪酸エステルは、好ましくは下記一般式(3)または(4)により示される化合物であってよい。例えば、脂肪酸エステルとして下記の一般式(3)により示される化合物および一般式(4)により示される化合物の一方が含まれていてよく、または両方が含まれていてもよい。 Further, the fatty acid ester may be preferably a compound represented by the following general formula (3) or (4). For example, as the fatty acid ester, one of the compound represented by the following general formula (3) and the compound represented by the following general formula (4) may be contained, or both may be contained.
潤滑剤が、一般式(1)に示される化合物および一般式(2)に示される化合物のいずれか一方若しくは両方と、一般式(3)に示される化合物および一般式(4)に示される化合物のいずれか一方若しくは両方と、を含むことによって、磁気テープMTを繰り返しの記録または再生による動摩擦係数の増加を抑制することができる。 The lubricant is one or both of the compound represented by the general formula (1) and the compound represented by the general formula (2), the compound represented by the general formula (3) and the compound represented by the general formula (4). By including either one or both of them, it is possible to suppress an increase in the dynamic friction coefficient due to repeated recording or reproduction of the magnetic tape MT.
CH3(CH2)kCOOH ・・・(1)
(但し、一般式(1)において、kは14以上22以下の範囲、より好ましくは14以上18以下の範囲から選ばれる整数である。)
CH 3 (CH 2 ) k COOH (1)
(However, in the general formula (1), k is an integer selected from the range of 14 or more and 22 or less, more preferably the range of 14 or more and 18 or less.)
CH3(CH2)nCH=CH(CH2)mCOOH ・・・(2)
(但し、一般式(2)において、nとmとの和は12以上20以下の範囲、より好ましくは14以上18以下の範囲から選ばれる整数である。)
CH 3 (CH 2) n CH = CH (CH 2) m COOH ··· (2)
(However, in the general formula (2), the sum of n and m is an integer selected from the range of 12 or more and 20 or less, more preferably the range of 14 or more and 18 or less.)
CH3(CH2)pCOO(CH2)qCH3 ・・・(3)
(但し、一般式(3)において、pは14以上22以下、より好ましくは14以上18以下の範囲から選ばれる整数であり、且つ、qは2以上5以下の範囲、より好ましくは2以上4以下の範囲から選ばれる整数である。)
CH 3 (CH 2) p COO (CH 2) q CH 3 ··· (3)
(However, in the general formula (3), p is an integer selected from the range of 14 or more and 22 or less, more preferably 14 or more and 18 or less, and q is the range of 2 or more and 5 or less, more preferably 2 or more and 4 or less. It is an integer selected from the following range.)
CH3(CH2)rCOO−(CH2)sCH(CH3)2 ・・・(4)
(但し、一般式(4)において、rは14以上22以下の範囲から選ばれる整数であり、sは1以上3以下の範囲から選ばれる整数である。)
CH 3 (CH 2) r COO- (CH 2) s CH (CH 3) 2 ··· (4)
(However, in general formula (4), r is an integer selected from the range of 14 or more and 22 or less, and s is an integer selected from the range of 1 or more and 3 or less.)
(帯電防止剤)
帯電防止剤としては、例えば、カーボンブラック、天然界面活性剤、ノニオン性界面活性剤、カチオン性界面活性剤等が挙げられる。
(Antistatic agent)
Examples of the antistatic agent include carbon black, natural surfactants, nonionic surfactants, and cationic surfactants.
(研磨剤)
研磨剤としては、例えば、α化率90%以上のα−アルミナ、β−アルミナ、γ−アルミナ、炭化ケイ素、酸化クロム、酸化セリウム、α−酸化鉄、コランダム、窒化珪素、チタンカ−バイト、酸化チタン、二酸化珪素、酸化スズ、酸化マグネシウム、酸化タングステン、酸化ジルコニウム、窒化ホウ素、酸化亜鉛、炭酸カルシウム、硫酸カルシウム、硫酸バリウム、2硫化モリブデン、磁性酸化鉄の原料を脱水、アニール処理した針状α酸化鉄、必要によりそれらをアルミおよび/またはシリカで表面処理したもの等が挙げられる。
(Abrasive)
As the abrasive, for example, α-alumina, β-alumina, γ-alumina, α-alumina having a conversion rate of 90% or more, silicon carbide, chromium oxide, cerium oxide, α-iron oxide, corundum, silicon nitride, titanium carbide, oxidation. Needle-shaped α obtained by dehydrating and annealing raw materials of titanium, silicon dioxide, tin oxide, magnesium oxide, tungsten oxide, zirconium oxide, boron nitride, zinc oxide, calcium carbonate, calcium sulfate, barium sulfate, molybdenum disulfide, and magnetic iron oxide. Examples thereof include iron oxide, and optionally those surface-treated with aluminum and/or silica.
(硬化剤)
硬化剤としては、例えば、ポリイソシアネート等が挙げられる。ポリイソシアネートとしては、例えば、トリレンジイソシアネート(TDI)と活性水素化合物との付加体等の芳香族ポリイソシアネート、ヘキサメチレンジイソシアネート(HMDI)と活性水素化合物との付加体等の脂肪族ポリイソシアネート等が挙げられる。これらポリイソシアネートの重量平均分子量は、100〜3000の範囲であることが望ましい。
(Curing agent)
Examples of the curing agent include polyisocyanate and the like. Examples of the polyisocyanate include aromatic polyisocyanates such as adducts of tolylene diisocyanate (TDI) and an active hydrogen compound, and aliphatic polyisocyanates such as adducts of hexamethylene diisocyanate (HMDI) and an active hydrogen compound. Can be mentioned. The weight average molecular weight of these polyisocyanates is preferably in the range of 100 to 3000.
(防錆剤)
防錆剤としては、例えばフェノール類、ナフトール類、キノン類、窒素原子を含む複素環化合物、酸素原子を含む複素環化合物、硫黄原子を含む複素環化合物等が挙げられる。
(anti-rust)
Examples of the rust preventive agent include phenols, naphthols, quinones, nitrogen atom-containing heterocyclic compounds, oxygen atom-containing heterocyclic compounds, and sulfur atom-containing heterocyclic compounds.
(非磁性補強粒子)
非磁性補強粒子として、例えば、酸化アルミニウム(α、βまたはγアルミナ)、酸化クロム、酸化珪素、ダイヤモンド、ガーネット、エメリー、窒化ホウ素、チタンカーバイト、炭化珪素、炭化チタン、酸化チタン(ルチル型またはアナターゼ型の酸化チタン)等が挙げられる。
(Non-magnetic reinforcing particles)
Examples of non-magnetic reinforcing particles include aluminum oxide (α, β or γ alumina), chromium oxide, silicon oxide, diamond, garnet, emery, boron nitride, titanium carbide, silicon carbide, titanium carbide, titanium oxide (rutile type or Anatase type titanium oxide) and the like.
(下地層)
下地層42は、基体41の表面の凹凸を緩和し、磁性層43の表面の凹凸を調整するためのものである。下地層42は、非磁性粉、結着剤および潤滑剤を含む非磁性層である。下地層42は、磁性層43の表面に潤滑剤を供給する。下地層42が、必要に応じて、帯電防止剤、硬化剤および防錆剤等のうちの少なくとも1種の添加剤をさらに含んでいてもよい。
(Underlayer)
The
下地層42の平均厚みは、好ましくは0.3μm以上2.0μm以下、より好ましくは0.5μm以上1.4μm以下である。なお、下地層42の平均厚みは、磁性層43の平均厚みと同様にして求められる。但し、TEM像の倍率は、下地層42の厚みに応じて適宜調整される。下地層42の平均厚みが2.0μm以下であると、外力による磁気テープMTの伸縮性がさらに高くなるため、テンション調整による磁気テープMTの幅の調整がさらに容易となる。
The average thickness of the
下地層42は、多数の孔部を有していることが好ましい。これらの多数の孔部に潤滑剤が蓄えられることで、繰り返し記録または再生を行った後にも(すなわち磁気ヘッド56を磁気テープMTの表面に接触させて繰り返し走行を行った後にも)、磁性層43の表面と磁気ヘッドの間に対する潤滑剤の供給量の低下をさらに抑制することができる。したがって、動摩擦係数の増加をさらに抑制することができる。すなわち、さらに優れた走行安定性を得ることができる。
The
繰り返し記録または再生後における動摩擦係数の低下を抑制する観点からすると、下地層42の孔部と磁性層43の孔部43Aとがつながっていることが好ましい。ここで、下地層42の孔部と磁性層43の孔部43Aとがつながっているとは、下地層42の多数の孔部のうちの一部のものと、磁性層43の多数の孔部43Aのうちの一部のものとがつながっている状態を含むものとする。
From the viewpoint of suppressing the decrease in the dynamic friction coefficient after repeated recording or reproduction, it is preferable that the hole portion of the
磁性層43の表面に対する潤滑剤の供給性を向上する観点からすると、多数の孔部は、磁性層43の表面に対して垂直方向に延設されているものを含んでいることが好ましい。また、磁性層43の表面に対する潤滑剤の供給性を向上する観点からすると、磁性層43の表面に対して垂直方向に延設された下地層42の孔部と、磁性層43の表面に対して垂直方向に延設された磁性層43の孔部43Aとがつながっていることが好ましい。
From the viewpoint of improving the supply of the lubricant to the surface of the
(非磁性粉)
非磁性粉は、例えば無機粒子粉または有機粒子粉の少なくとも1種を含む。また、非磁性粉は、カーボンブラック等の炭素粉を含んでいてもよい。なお、1種の非磁性粉を単独で用いてもよいし、2種以上の非磁性粉を組み合わせて用いてもよい。無機粒子は、例えば、金属、金属酸化物、金属炭酸塩、金属硫酸塩、金属窒化物、金属炭化物または金属硫化物等を含む。非磁性粉の形状としては、例えば、針状、球状、立方体状、板状等の各種形状が挙げられるが、これらの形状に限定されるものではない。
(Non-magnetic powder)
The non-magnetic powder contains, for example, at least one kind of inorganic particle powder and organic particle powder. The non-magnetic powder may contain carbon powder such as carbon black. In addition, one type of non-magnetic powder may be used alone, or two or more types of non-magnetic powder may be used in combination. The inorganic particles include, for example, metal, metal oxide, metal carbonate, metal sulfate, metal nitride, metal carbide or metal sulfide. Examples of the shape of the non-magnetic powder include various shapes such as a needle shape, a spherical shape, a cubic shape, and a plate shape, but are not limited to these shapes.
(結着剤、潤滑剤)
結着剤および潤滑剤は、上述の磁性層43と同様である。
(Binder, lubricant)
The binder and the lubricant are the same as those of the
(添加剤)
帯電防止剤、硬化剤および防錆剤はそれぞれ、上述の磁性層43と同様である。
(Additive)
The antistatic agent, the curing agent and the rust preventive agent are the same as those of the
(バック層)
バック層44は、結着剤および非磁性粉を含む。バック層44が、必要に応じて潤滑剤、硬化剤および帯電防止剤等のうちの少なくとも1種の添加剤をさらに含んでいてもよい。結着剤および非磁性粉は、上述の下地層42と同様である。
(Back layer)
The
非磁性粉の平均粒子サイズは、好ましくは10nm以上150nm以下、より好ましくは15nm以上110nm以下である。非磁性粉の平均粒子サイズは、上記の磁性粉の平均粒子サイズと同様にして求められる。非磁性粉が、2以上の粒度分布を有する非磁性粉を含んでいてもよい。 The average particle size of the non-magnetic powder is preferably 10 nm or more and 150 nm or less, more preferably 15 nm or more and 110 nm or less. The average particle size of the non-magnetic powder is determined in the same manner as the average particle size of the above magnetic powder. The non-magnetic powder may include non-magnetic powder having a particle size distribution of 2 or more.
バック層44の平均厚みの上限値は、好ましくは0.6μm以下である。バック層44の平均厚みの上限値が0.6μm以下であると、磁気テープMTの平均厚みが5.6μm以下である場合でも、下地層42や基体41の厚みを厚く保つことができるので、磁気テープMTの記録再生装置50内での走行安定性を保つことができる。バック層44の平均厚みの下限値は特に限定されるものではないが、例えば0.2μm以上である。
The upper limit of the average thickness of the
バック層44の平均厚みtbは以下のようにして求められる。まず、磁気テープMTの平均厚みtTを測定する。平均厚みtTの測定方法は、以下の「磁気テープの平均厚み」に記載されている通りである。続いて、サンプルのバック層44をMEK(メチルエチルケトン)または希塩酸等の溶剤で除去する。次に、Mitutoyo社製レーザーホロゲージ(LGH-110C)を用いて、サンプルの厚みを5点以上の位置で測定し、それらの測定値を単純に平均(算術平均)して、平均値tB[μm]を算出する。その後、以下の式よりバック層44の平均厚みtb[μm]を求める。なお、測定位置は、サンプルから無作為に選ばれるものとする。
tb[μm]=tT[μm]−tB[μm]
The average thickness t b of the
t b [μm]=t T [μm]−t B [μm]
バック層44は、多数の突部44Aが設けられた表面を有している。多数の突部44Aは、磁気テープMTをロール状に巻き取った状態において、磁性層43の表面に多数の孔部43Aを形成するためのものである。多数の孔部43Aは、例えば、バック層44の表面から突出された多数の非磁性粒子により構成されている。
The
(磁気テープの平均厚み)
磁気テープMTの平均厚み(平均全厚)tTの上限値が、5.6μm以下、好ましくは5.0μm以下、より好ましくは4.6μm以下、さらにより好ましくは4.4μm以下である。磁気テープMTの平均厚みtTが5.6μm以下であると、1データカートリッジ内に記録できる記録容量を一般的な磁気テープよりも高めることができる。磁気テープMTの平均厚みtTの下限値は特に限定されるものではないが、例えば3.5μm以上である。
(Average thickness of magnetic tape)
The upper limit of the average thickness (average total thickness) t T of the magnetic tape MT is 5.6 μm or less, preferably 5.0 μm or less, more preferably 4.6 μm or less, and even more preferably 4.4 μm or less. When the average thickness t T of the magnetic tape MT is 5.6 μm or less, the recording capacity that can be recorded in one data cartridge can be increased as compared with a general magnetic tape. The lower limit of the average thickness t T of the magnetic tape MT is not particularly limited, but is 3.5 μm or more, for example.
磁気テープMTの平均厚みtTは以下のようにして求められる。まず、1/2インチ幅の磁気テープMTを準備し、それを250mmの長さに切り出し、サンプルを作製する。次に、測定装置としてMitutoyo社製レーザーホロゲージ(LGH-110C)を用いて、サンプルの厚みを5点以上の位置で測定し、それらの測定値を単純に平均(算術平均)して、平均値tT[μm]を算出する。なお、測定位置は、サンプルから無作為に選ばれるものとする。 The average thickness t T of the magnetic tape MT is obtained as follows. First, a magnetic tape MT having a width of ½ inch is prepared and cut into a length of 250 mm to prepare a sample. Next, the thickness of the sample is measured at 5 or more positions using a laser hologage (LGH-110C) manufactured by Mitutoyo as a measuring device, and the measured values are simply averaged (arithmetic average) to obtain the average. The value t T [μm] is calculated. The measurement position shall be randomly selected from the sample.
(保磁力Hc)
磁気テープMTの長手方向における磁性層43の保磁力Hc2の上限値が、好ましくは2000Oe以下、より好ましくは1900Oe以下、さらにより好ましくは1800Oe以下である。長手方向における磁性層43の保磁力Hc2が2000Oe以下であると、高記録密度であっても十分な電磁変換特性を有することができる。
(Coercive force Hc)
The upper limit of the coercive force Hc2 of the
磁気テープMTの長手方向に測定した磁性層43の保磁力Hc2の下限値が、好ましくは1000Oe以上である。長手方向に測定した磁性層43の保磁力Hc2が1000Oe以上であると、記録ヘッドからの漏れ磁束による減磁を抑制することができる。
The lower limit of the coercive force Hc2 of the
上記の保磁力Hc2は以下のようにして求められる。まず、磁気テープMTが両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、測定サンプルが作製される。この際に、磁気テープMTの長手方向(走行方向)が認識できるように、磁性を持たない任意のインクでマーキングを行う。そして、振動試料型磁力計(Vibrating Sample Magnetometer:VSM)を用いて磁気テープMTの長手方向(走行方向)に対応する測定サンプル(磁気テープMT全体)のM−Hループが測定される。次に、アセトンまたはエタノール等が用いられて塗膜(下地層42、磁性層43およびバック層44等)が払拭され、基体41のみが残される。そして、得られた基体41が両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、バックグラウンド補正用のサンプル(以下、単に「補正用サンプル」)が作製される。その後、VSMを用いて基体41の垂直方向(磁気テープMTの垂直方向)に対応する補正用サンプル(基体41)のM−Hループが測定される。
The above coercive force Hc2 is obtained as follows. First, three magnetic tapes MT are laminated with double-sided tape, and then punched with a φ6.39 mm punch to prepare a measurement sample. At this time, marking is performed with an arbitrary ink having no magnetism so that the longitudinal direction (traveling direction) of the magnetic tape MT can be recognized. Then, the MH loop of the measurement sample (entire magnetic tape MT) corresponding to the longitudinal direction (traveling direction) of the magnetic tape MT is measured using a vibrating sample magnetometer (VSM). Next, the coating film (the
測定サンプル(磁気テープMTの全体)のM−Hループ、補正用サンプル(基体41)のM−Hループの測定においては、東英工業社製の高感度振動試料型磁力計「VSM−P7−15型」が用いられる。測定条件は、測定モード:フルループ、最大磁界:15kOe、磁界ステップ:40bit、Time constant of Locking amp:0.3sec、Waiting time:1sec、MH平均数:20とされる。
In the measurement of the MH loop of the measurement sample (entire magnetic tape MT) and the MH loop of the correction sample (base 41), a high-sensitivity vibration sample magnetometer "VSM-P7-" manufactured by Toei Industry Co., Ltd.
測定サンプル(磁気テープMTの全体)のM−Hループおよび補正用サンプル(基体41)のM−Hループが得られた後、測定サンプル(磁気テープMTの全体)のM−Hループから補正用サンプル(基体41)のM−Hループが差し引かれることで、バックグラウンド補正が行われ、バックグラウンド補正後のM−Hループが得られる。このバックグラウンド補正の計算には、「VSM−P7−15型」に付属されている測定・解析プログラムが用いられる。得られたバックグラウンド補正後のM−Hループから保磁力Hc2が求められる。なお、この計算には、「VSM−P7−15型」に付属されている測定・解析プログラムが用いられる。なお、上記のM−Hループの測定はいずれも、25℃にて行われるものとする。また、M−Hループを磁気テープMTの長手方向に測定する際の“反磁界補正”は行わないものとする。 After the MH loop of the measurement sample (entire magnetic tape MT) and the MH loop of the correction sample (base 41) are obtained, correction is performed from the MH loop of the measurement sample (entire magnetic tape MT). Background correction is performed by subtracting the MH loop of the sample (base 41), and the MH loop after background correction is obtained. A measurement/analysis program attached to "VSM-P7-15 type" is used for the calculation of the background correction. The coercive force Hc2 is obtained from the obtained MH loop after background correction. A measurement/analysis program attached to the "VSM-P7-15 type" is used for this calculation. In addition, the measurement of the above-mentioned MH loop shall be performed at 25 degreeC. In addition, "diamagnetic field correction" when measuring the MH loop in the longitudinal direction of the magnetic tape MT is not performed.
(角形比)
磁気テープMTの垂直方向(厚み方向)における磁性層43の角形比S1が、好ましくは65%以上、より好ましくは70%以上、さらにより好ましくは75%以上、特に好ましくは80%以上、最も好ましくは85%以上である。角形比S1が65%以上であると、磁性粉の垂直配向性が十分に高くなるため、さらに優れた電磁変換特性(例えばSNR)を得ることができる。
(Squareness ratio)
The squareness S1 of the
垂直方向における角形比S1は以下のようにして求められる。まず、磁気テープMTが両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、測定サンプルが作製される。この際に、磁気テープMTの長手方向(走行方向)が認識できるように、磁性を持たない任意のインクでマーキングを行う。そして、VSMを用いて磁気テープMTの垂直方向(厚み方向)に対応する測定サンプル(磁気テープMTの全体)のM−Hループが測定される。次に、アセトンまたはエタノール等が用いられて塗膜(下地層12、磁性層43およびバック層44等)が払拭され、基体41のみが残される。そして、得られた基体41が両面テープで3枚重ね合わされた後、φ6.39mmのパンチで打ち抜かれて、バックグラウンド補正用のサンプル(以下、単に「補正用サンプル」)とされる。その後、VSMを用いて基体41の垂直方向(磁気テープMTの垂直方向)に対応する補正用サンプル(基体41)のM−Hループが測定される。
The squareness S1 in the vertical direction is obtained as follows. First, three magnetic tapes MT are laminated with double-sided tape, and then punched with a φ6.39 mm punch to prepare a measurement sample. At this time, marking is performed with an arbitrary ink having no magnetism so that the longitudinal direction (traveling direction) of the magnetic tape MT can be recognized. Then, the MH loop of the measurement sample (the entire magnetic tape MT) corresponding to the vertical direction (thickness direction) of the magnetic tape MT is measured using the VSM. Next, the coating film (the
測定サンプル(磁気テープMTの全体)のM−Hループ、補正用サンプル(基体41)のM−Hループの測定においては、東英工業社製の高感度振動試料型磁力計「VSM−P7−15型」が用いられる。測定条件は、測定モード:フルループ、最大磁界:15kOe、磁界ステップ:40bit、Time constant of Locking amp:0.3sec、Waiting time:1sec、MH平均数:20とされる。
In the measurement of the MH loop of the measurement sample (entire magnetic tape MT) and the MH loop of the correction sample (base 41), a high-sensitivity vibration sample magnetometer "VSM-P7-" manufactured by Toei Industry Co., Ltd.
測定サンプル(磁気テープMTの全体)のM−Hループおよび補正用サンプル(基体41)のM−Hループが得られた後、測定サンプル(磁気テープMTの全体)のM−Hループから補正用サンプル(基体41)のM−Hループが差し引かれることで、バックグラウンド補正が行われ、バックグラウンド補正後のM−Hループが得られる。このバックグラウンド補正の計算には、「VSM−P7−15型」に付属されている測定・解析プログラムが用いられる。 After the MH loop of the measurement sample (entire magnetic tape MT) and the MH loop of the correction sample (base 41) are obtained, correction is performed from the MH loop of the measurement sample (entire magnetic tape MT). Background correction is performed by subtracting the MH loop of the sample (base 41), and the MH loop after background correction is obtained. A measurement/analysis program attached to "VSM-P7-15 type" is used for the calculation of the background correction.
得られたバックグラウンド補正後のM−Hループの飽和磁化Ms(emu)および残留磁化Mr(emu)が以下の式に代入されて、角形比S1(%)が計算される。なお、上記のM−Hループの測定はいずれも、25℃にて行われるものとする。また、M−Hループを磁気テープMTの垂直方向に測定する際の“反磁界補正”は行わないものとする。なお、この計算には、「VSM−P7−15型」に付属されている測定・解析プログラムが用いられる。
角形比S1(%)=(Mr/Ms)×100
The saturation magnetization Ms(emu) and the residual magnetization Mr(emu) of the obtained MH loop after background correction are substituted into the following formula to calculate the squareness ratio S1(%). In addition, the measurement of the above-mentioned MH loop shall be performed at 25 degreeC. In addition, "diamagnetic field correction" when measuring the MH loop in the vertical direction of the magnetic tape MT is not performed. A measurement/analysis program attached to the "VSM-P7-15 type" is used for this calculation.
Squareness ratio S1(%)=(Mr/Ms)×100
磁気テープMTの長手方向(走行方向)における磁性層43の角形比S2が、好ましくは35%以下、より好ましくは30%以下、さらにより好ましくは25%以下、特に好ましくは20%以下、最も好ましくは15%以下である。角形比S2が35%以下であると、磁性粉の垂直配向性が十分に高くなるため、さらに優れた電磁変換特性(例えばSNR)を得ることができる。
The squareness S2 of the
長手方向における角形比S2は、M−Hループを磁気テープMTおよび基体41の長手方向(走行方向)に測定すること以外は角形比S1と同様にして求められる。
The squareness ratio S2 in the longitudinal direction is obtained in the same manner as the squareness ratio S1 except that the MH loop is measured in the longitudinal direction (running direction) of the magnetic tape MT and the
(Hc2/Hc1)
垂直方向における磁性層43の保磁力Hc1と、長手方向における磁性層43の保磁力Hc2の比Hc2/Hc1が、Hc2/Hc1≦0.8、好ましくはHc2/Hc1≦0.75、より好ましくはHc2/Hc1≦0.7、さらにより好ましくはHc2/Hc1≦0.65、特に好ましくはHc2/Hc1≦0.6の関係を満たす。保磁力Hc1、Hc2がHc2/Hc1≦0.8の関係を満たすことで、磁性粉の垂直配向度を高めることができる。したがって、磁化遷移幅を低減し、かつ信号再生時に高出力の信号を得ることができるので、さらに優れた電磁変換特性(例えばSNR)を得ることができる。なお、上述したように、Hc2が小さいと、記録ヘッドからの垂直方向の磁界により感度良く磁化が反応するため、良好な記録パターンを形成することができる。
(Hc2/Hc1)
The ratio Hc2/Hc1 of the coercive force Hc1 of the
比Hc2/Hc1がHc2/Hc1≦0.8である場合、磁性層43の平均厚みが90nm以下であることが特に有効である。磁性層43の平均厚みが90nmを超えると、記録ヘッドとしてリング型ヘッドを用いた場合に、磁性層43の下部領域(下地層42側の領域)が長手方向に磁化されてしまい、磁性層43を厚み方向に均一に磁化することができなくなる虞がある。したがって、比Hc2/Hc1をHc2/Hc1≦0.8としても(すなわち、磁性粉の垂直配向度を高めても)、さらに優れた電磁変換特性(例えばSNR)を得られなくなる虞がある。
When the ratio Hc2/Hc1 is Hc2/Hc1≦0.8, it is particularly effective that the average thickness of the
Hc2/Hc1の下限値は特に限定されるものではないが、例えば0.5≦Hc2/Hc1である。なお、Hc2/Hc1は磁性粉の垂直配向度を表しており、Hc2/Hc1が小さいほど磁性粉の垂直配向度が高くなる。 The lower limit of Hc2/Hc1 is not particularly limited, but is 0.5≦Hc2/Hc1, for example. Hc2/Hc1 represents the degree of vertical orientation of magnetic powder, and the smaller Hc2/Hc1, the higher the degree of vertical orientation of magnetic powder.
長手方向における磁性層43の保磁力Hc2の算出方法は、上述した通りである。垂直方向における磁性層43の保磁力Hc1は、M−Hループを磁気テープMTおよび基体41の垂直方向(厚み方向)に測定すること以外は長手方向における磁性層43の保磁力Hc2と同様にして求められる。
The method of calculating the coercive force Hc2 of the
(活性化体積Vact)
活性化体積Vactが、好ましくは8000nm3以下、より好ましくは6000nm3以下、さらにより好ましくは5000nm3以下、特に好ましくは4000nm3以下、最も好ましくは3000nm3以下である。活性化体積Vactが8000nm3以下であると、磁性粉の分散状態が良好になるため、ビット反転領域を急峻にすることができ、記録ヘッドからの漏れ磁界により、隣接するトラックに記録された磁化信号が劣化することを抑制できる。したがって、さらに優れた電磁変換特性(例えばSNR)が得られなくなる虞がある。
(Activation volume V act )
Activation volume V act is preferably 8000 nm 3 or less, more preferably 6000 nm 3 or less, still more preferably 5000 nm 3 or less, particularly preferably 4000 nm 3 or less, most preferably 3000 nm 3 or less. When the activation volume V act is 8000 nm 3 or less, the dispersion state of the magnetic powder becomes good, so that the bit inversion region can be made steep, and the magnetic field leaked from the recording head recorded on the adjacent track. It is possible to suppress deterioration of the magnetization signal. Therefore, there is a possibility that further excellent electromagnetic conversion characteristics (for example, SNR) may not be obtained.
上記の活性化体積Vactは、Street&Woolleyにより導出された下記の式により求められる。
Vact(nm3)=kB×T×Χirr/(μ0×Ms×S)
(但し、kB:ボルツマン定数(1.38×10-23J/K)、T:温度(K)、Χirr:非可逆磁化率、μ0:真空の透磁率、S:磁気粘性係数、Ms:飽和磁化(emu/cm3))
The above-mentioned activation volume V act is obtained by the following equation derived by Street & Woolley.
V act (nm 3 )=k B ×T×Δ irr /(μ 0 ×Ms×S)
(However, k B : Boltzmann constant (1.38×10 −23 J/K), T: temperature (K), Χ irr : irreversible magnetic susceptibility, μ 0 : magnetic permeability of vacuum, S: magnetic viscosity coefficient, Ms: saturation magnetization (emu/cm 3 ))
上記式に代入される非可逆磁化率Χirr、飽和磁化Msおよび磁気粘性係数Sは、VSMを用いて以下のようにして求められる。なお、VSMによる測定方向は、磁気テープMTの厚み方向(垂直方向)とする。また、VSMによる測定は、長尺状の磁気テープMTから切り出された測定サンプルに対して25℃にて行われるものとする。また、M−Hループを磁気テープMTの厚み方向(垂直方向)に測定する際の“反磁界補正”は行わないものとする。 The irreversible magnetic susceptibility Χ irr , the saturation magnetization Ms, and the magnetic viscosity coefficient S, which are substituted into the above equation, are obtained as follows using VSM. The measurement direction by VSM is the thickness direction (vertical direction) of the magnetic tape MT. Further, the measurement by VSM is performed at 25° C. on the measurement sample cut out from the long magnetic tape MT. In addition, "diamagnetic field correction" when measuring the MH loop in the thickness direction (vertical direction) of the magnetic tape MT is not performed.
(非可逆磁化率Χirr)
非可逆磁化率Χirrは、残留磁化曲線(DCD曲線)の傾きにおいて、残留保磁力Hr付近における傾きと定義される。まず、磁気テープMT全体に−1193kA/m(15kOe)の磁界を印加し、磁界をゼロに戻し残留磁化状態とする。その後、反対方向に約15.9kA/m(200Oe)の磁界を印加し再びゼロに戻し残留磁化量を測定する。その後も同様に、先ほどの印加磁界よりもさらに15.9kA/m大きい磁界を印加しゼロに戻す測定を繰り返し行い、印加磁界に対して残留磁化量をプロットしDCD曲線を測定する。得られたDCD曲線から、磁化量ゼロとなる点を残留保磁力Hrとし、さらにDCD曲線を微分し、各磁界におけるDCD曲線の傾きを求める。このDCD曲線の傾きにおいて、残留保磁力Hr付近の傾きがΧirrとなる。
(Irreversible magnetic susceptibility Χ irr )
The irreversible magnetic susceptibility Χ irr is defined as the gradient of the residual magnetization curve (DCD curve) near the residual coercive force Hr. First, a magnetic field of -1193 kA/m (15 kOe) is applied to the entire magnetic tape MT to return the magnetic field to zero and bring it to a remanent magnetization state. After that, a magnetic field of about 15.9 kA/m (200 Oe) is applied in the opposite direction to return it to zero again and measure the residual magnetization. After that, similarly, a magnetic field 15.9 kA/m larger than the applied magnetic field is applied and the measurement for returning to zero is repeated, and the residual magnetization is plotted against the applied magnetic field to measure the DCD curve. From the obtained DCD curve, the point at which the magnetization amount is zero is set as the residual coercive force Hr, and the DCD curve is further differentiated to obtain the slope of the DCD curve in each magnetic field. In the slope of this DCD curve, the slope in the vicinity of the residual coercive force Hr is πirr .
(飽和磁化Ms)
まず、上記の角形比S1の測定方法と同様にして、バックグラウンド補正後のM−Hループを得る。次に、得られたM−Hループの飽和磁化Ms(emu)の値と、測定サンプル中の磁性層43の体積(cm3)から、Ms(emu/cm3)を算出する。なお、磁性層43の体積は測定サンプルの面積に磁性層43の平均厚みを乗ずることにより求められる。磁性層43の体積の算出に必要な磁性層43の平均厚みの算出方法は、上述した通りである。
(Saturation magnetization Ms)
First, the MH loop after background correction is obtained in the same manner as the method of measuring the squareness ratio S1 described above. Next, Ms(emu/cm 3 ) is calculated from the value of the saturation magnetization Ms(emu) of the obtained MH loop and the volume (cm 3 ) of the
(磁気粘性係数S)
まず、磁気テープMT(測定サンプル)全体に−1193kA/m(15kOe)の磁界を印加し、磁界をゼロに戻し残留磁化状態とする。その後、反対方向に、DCD曲線より得られた残留保磁力Hrの値と同等の磁界を印加する。磁界を印加した状態で1000秒間、磁化量を一定の時間間隔で継続的に測定する。このようにして得られた、時間tと磁化量M(t)の関係を以下の式に照らし合わせて、磁気粘性係数Sを算出する。
M(t)=M0+S×ln(t)
(但し、M(t):時間tの磁化量、M0:初期の磁化量、S:磁気粘性係数、ln(t):時間の自然対数)
(Magnetic viscosity coefficient S)
First, a magnetic field of -1193 kA/m (15 kOe) is applied to the entire magnetic tape MT (measurement sample) to return the magnetic field to zero and bring it to a remanent magnetization state. Then, in the opposite direction, a magnetic field equivalent to the value of the residual coercive force Hr obtained from the DCD curve is applied. With the magnetic field applied, the magnetization amount is continuously measured at regular time intervals for 1000 seconds. The relationship between the time t and the magnetization amount M(t) thus obtained is compared with the following formula to calculate the magneto-viscosity coefficient S.
M(t)=M0+S×ln(t)
(However, M(t): magnetization amount at time t, M0: initial magnetization amount, S: magnetic viscosity coefficient, ln(t): natural logarithm of time)
(バック面の表面粗度Rb)
バック面の表面粗度(バック層44の表面粗度)Rbが、Rb≦6.0[nm]であることが好ましい。バック面の表面粗度Rbが上記範囲であると、さらに優れた電磁変換特性を得ることができる。
(Back surface roughness R b )
The surface roughness R b of the back surface (surface roughness of the back layer 44) is preferably R b ≦6.0 [nm]. When the surface roughness R b of the back surface is within the above range, more excellent electromagnetic conversion characteristics can be obtained.
バック面の表面粗度Rbは以下のようにして求められる。まず、12.65mm幅の磁気テープMTを準備し、それを100mmの長さに切り出し、サンプルを作製する。次に、サンプルの被測定面(磁性層側の表面)が上になるようにスライドグラスに乗せ、サンプルの端部をメンディングテープで固定する。測定装置としてVertScan(対物レンズ50倍)を用いて表面形状を測定し、ISO 25178の規格に基づいて以下の式からバック面の表面粗度Rbを求める。
装置:光干渉を用いた非接触粗度計
(株式会社菱化システム製 非接触表面・層断面形状計測システム VertScan R5500GL-M100-AC)
対物レンズ:20倍
測定領域:640×480ピクセル(視野:約237μm×178μm視野)
測定モード:phase
波長フィルター:520nm
CCD:1/3レンズ
ノイズ除去フィルター:スムージング3×3
面補正:2次多項式近似面にて補正
測定ソフトウエア:VS-Measure Version5.5.2
解析ソフトウエア:VS-viewer Version5.5.5
![]()
各位置で得られた表面プロファイルから自動計算されたそれぞれの算術平均粗さSa(nm)の平均値をバック面の表面粗度Rb(nm)とする。
The surface roughness R b of the back surface is obtained as follows. First, a magnetic tape MT having a width of 12.65 mm is prepared and cut into a length of 100 mm to prepare a sample. Then, the sample is placed on a slide glass so that the surface to be measured (surface on the magnetic layer side) faces up, and the end of the sample is fixed with a mending tape. The surface shape is measured using a VertScan (50 times objective lens) as a measuring device, and the surface roughness R b of the back surface is obtained from the following formula based on the ISO 25178 standard.
Equipment: Non-contact roughness meter using optical interference (Ryoka System Co., Ltd. non-contact surface/layer cross-section shape measurement system VertScan R5500GL-M100-AC)
Objective lens: 20 times Measurement area: 640×480 pixels (field of view: approximately 237 μm×178 μm field of view)
Measurement mode: phase
Wavelength filter: 520nm
CCD: 1/3 lens Noise removal filter: Smoothing 3×3
Surface correction: Corrected by the second-order polynomial approximation surface Measurement software: VS-Measure Version5.5.2
Analysis software: VS-viewer Version5.5.5
![]()
The average value of the arithmetic average roughness S a (nm) automatically calculated from the surface profile obtained at each position is defined as the surface roughness R b (nm) of the back surface.
(磁気テープの長手方向のヤング率)
磁気テープMTの長手方向のヤング率は、好ましくは8.0GPa以下、より好ましくは7.9GPa以下、さらにより好ましくは7.5GPa以下、特に好ましくは7.1GPa以下である。磁気テープMTの長手方向のヤング率が8.0GPa以下であると、外力による磁気テープMTの伸縮性がさらに高くなるため、テンション調整による磁気テープMTの幅の調整がさらに容易となる。したがって、オフトラックをさらに適切に抑制することができ、磁気テープMTに記録されたデータをさらに正確に再生することが可能となる。
(Young's modulus in the longitudinal direction of the magnetic tape)
The Young's modulus in the longitudinal direction of the magnetic tape MT is preferably 8.0 GPa or less, more preferably 7.9 GPa or less, even more preferably 7.5 GPa or less, and particularly preferably 7.1 GPa or less. When the Young's modulus in the longitudinal direction of the magnetic tape MT is 8.0 GPa or less, the elasticity of the magnetic tape MT is further enhanced by an external force, and thus the width of the magnetic tape MT can be adjusted more easily by adjusting the tension. Therefore, the off-track can be suppressed more appropriately, and the data recorded on the magnetic tape MT can be reproduced more accurately.
磁気テープMTの長手方向のヤング率は、外力による磁気テープMTの長手方向における伸縮のし難さを示す値であり、この値が大きいほど外力により磁気テープMTは長手方向に伸縮し難く、この値が小さいほど外力により磁気テープMTは長手方向に伸縮しやすい。 The Young's modulus in the longitudinal direction of the magnetic tape MT is a value indicating the difficulty of expansion/contraction in the longitudinal direction of the magnetic tape MT due to an external force. The larger this value is, the more difficult it is for the magnetic tape MT to expand/contract in the longitudinal direction. The smaller the value, the easier the magnetic tape MT expands and contracts in the longitudinal direction due to the external force.
なお、磁気テープMTの長手方向のヤング率は、磁気テープMTの長手方向に関する値であるが、磁気テープMTの幅方向の伸縮のし難さとも相関がある。つまり、この値が大きいほど磁気テープMTは外力により幅方向に伸縮し難く、この値が小さいほど磁気テープMTは外力により幅方向に伸縮しやすい。したがって、テンション調整の観点から、磁気テープMTの長手方向のヤング率は、小さい方が有利である。 Although the Young's modulus in the longitudinal direction of the magnetic tape MT is a value in the longitudinal direction of the magnetic tape MT, it also correlates with the difficulty of expansion and contraction in the width direction of the magnetic tape MT. That is, the larger this value is, the harder the magnetic tape MT expands and contracts in the width direction by the external force, and the smaller this value, the easier the magnetic tape MT expands and contracts in the width direction by the external force. Therefore, from the viewpoint of tension adjustment, it is advantageous that the Young's modulus of the magnetic tape MT in the longitudinal direction is small.
ヤング率の測定には引っ張り試験機(島津製作所製、AG-100D)を用いる。テープ長手方向のヤング率を測定したい場合は、テープを180mmの長さにカットして測定サンプルを準備する。上記引っ張り試験機にテープの幅(1/2インチ)を固定できる冶具を取り付け、テープ幅の上下を固定する。距離(チャック間のテープの長さ)は100mmにする。テープサンプルをチャック後、サンプルを引っ張る方向に応力を徐々にかけていく。引っ張り速度は0.1mm/minとする。この時の応力の変化と伸び量から、以下の式を用いてヤング率を計算する。
E(N/m2)=((ΔN/S)/(Δx/L))×106
ΔN:応力の変化(N)
S:試験片の断面積(mm2)
Δx:伸び量(mm)
L:つかみ治具間距離(mm)
応力の範囲としては0.5Nから1.0Nとし、この時の応力変化(ΔN)と伸び量(Δx)を計算に使用する。
A tensile tester (AG-100D, manufactured by Shimadzu Corp.) is used to measure the Young's modulus. When it is desired to measure the Young's modulus in the tape longitudinal direction, the tape is cut into a length of 180 mm to prepare a measurement sample. A jig capable of fixing the width (1/2 inch) of the tape is attached to the tensile tester and the upper and lower sides of the tape width are fixed. The distance (length of tape between chucks) is 100 mm. After chucking the tape sample, stress is gradually applied in the direction of pulling the sample. The pulling speed is 0.1 mm/min. The Young's modulus is calculated from the change in stress and the amount of elongation at this time using the following formula.
E(N/m 2 )=((ΔN/S)/(Δx/L))×10 6
ΔN: Change in stress (N)
S: Cross-sectional area of test piece (mm 2 )
Δx: Elongation (mm)
L: Distance between gripping jigs (mm)
The stress range is 0.5 N to 1.0 N, and the stress change (ΔN) and the elongation amount (Δx) at this time are used for the calculation.
(基体の長手方向のヤング率)
基体41の長手方向のヤング率は、好ましくは7.5GPa以下、より好ましくは7.4GPa以下、さらにより好ましくは7.0GPa以下、特に好ましくは6.6GPa以下である。基体41の長手方向のヤング率が7.5GPa以下であると、外力による磁気テープMTの伸縮性がさらに高くなるため、テンション調整による磁気テープMTの幅の調整がさらに容易となる。したがって、オフトラックをさらに適切に抑制することができ、磁気テープMTに記録されたデータをさらに正確に再生することが可能となる。
(Young's modulus in the longitudinal direction of the substrate)
The Young's modulus in the longitudinal direction of the
上記の基体41の長手方向のヤング率は、次のようにして求められる。まず、磁気テープMTから下地層42、磁性層43およびバック層44を除去し、基体41を得る。この基体41を用いて、上記の磁気テープMTの長手方向のヤング率と同様の手順で基体41の長手方向のヤング率を求める。
The Young's modulus of the
基体41の厚さは、磁気テープMTの全体の厚さの半分以上を占めている。したがって、基体41の長手方向のヤング率は、外力による磁気テープMTの伸縮し難さと相関があり、この値が大きいほど磁気テープMTは外力により幅方向に伸縮し難く、この値が小さいほど磁気テープMTは外力により幅方向に伸縮しやすい。
The thickness of the
なお、基体41の長手方向のヤング率は、磁気テープMTの長手方向に関する値であるが、磁気テープMTの幅方向の伸縮のし難さとも相関がある。つまり、この値が大きいほど磁気テープMTは外力により幅方向に伸縮し難く、この値が小さいほど磁気テープMTは外力により幅方向に伸縮しやすい。したがって、テンション調整の観点から、基体41の長手方向のヤング率は、小さい方が有利である。
Although the Young's modulus in the longitudinal direction of the
(動摩擦係数)
磁気テープMTに加わる張力が1.2Nであるときの磁性層43の表面と磁気ヘッド56の間の動摩擦係数μAと、磁気テープMTに加わる張力が0.4Nであるときの磁性層43の表面と磁気ヘッド56の間の動摩擦係数μBとの摩擦係数比(μB/μA)が、好ましくは1.0以上2.0以下、より好ましくは1.0以上1.5以下である。摩擦係数比(μB/μA)が1.0以上で2.0以下であると、走行時の張力変動による動摩擦係数の変化を小さくできるため、磁気テープMTの走行時に磁気テープMTのテンション調整を行った場合にも、優れた走行安定性を得ることができる。
(Dynamic friction coefficient)
The dynamic friction coefficient μ A between the surface of the
摩擦係数比(μB/μA)を算出するための動摩擦係数μAおよび動摩擦係数μBは以下の通りにして求められる。先ず、図10Aに示すように、1/2インチ幅の磁気テープMTを、互いに離間して平行に配置された1インチ径の円柱状の2本のガイドロール73Aおよび73Bに磁性面が接触するように載せる。2本のガイドロール73Aおよび73Bは、硬い板状部材76に固定されており、これにより互いの位置関係が固定されている。
The dynamic friction coefficient μ A and the dynamic friction coefficient μ B for calculating the friction coefficient ratio (μ B /μ A ) are calculated as follows. First, as shown in FIG. 10A, a magnetic surface of a magnetic tape MT having a width of 1/2 inch comes into contact with two cylindrical guide rolls 73A and 73B having a diameter of 1 inch and spaced apart from each other and arranged in parallel. To put. The two guide rolls 73A and 73B are fixed to a hard plate-shaped
次いで、LTO5ドライブに搭載されているヘッドブロック(記録再生用)74に対し、磁気テープMTを、磁性面が接触するように且つ抱き角θ1(°)=5.6°となるように接触させる。ヘッドブロック74は、ガイドロール73Aおよび73Bの略中心に配置される。ヘッドブロック74は、抱き角θ1を変更することができるように、板状部材76に移動可能に取り付けられているが、抱き角θ1(°)が5.6°となったらその位置が板状部材76に対して固定され、これにより、ガイドロール73Aおよび73Bとヘッドブロック74との位置関係も固定される。
Next, the magnetic tape MT is brought into contact with the head block (for recording/playback) 74 mounted on the LTO5 drive so that the magnetic surface comes into contact and the holding angle θ 1 (°)=5.6°. Let The
磁気テープMTの一端を、ジグ72を介して可動式ストレインゲージ71と繋ぐ。磁気テープMTは、図10Bに示されるとおりにジグ72に固定される。磁気テープMTの他端に錘75を繋ぐ。錘75によって、0.4Nのテンション(T0[N])が磁気テープMTの長手方向に付与される。可動式ストレインゲージ71は、台77上に固定されている。台77と板状部材76の位置関係も固定されており、これにより、ガイドロール73Aおよび73B、ヘッドブロック74、および可動式ストレインゲージ71の位置関係が固定されている。
One end of the magnetic tape MT is connected to the
可動式ストレインゲージ71によって、磁気テープMTが10mm/sにて可動式ストレインゲージ71へ向かうように、磁気テープMTをヘッドブロック74上を60mm摺動させる。当該摺動時の可動式ストレインゲージ71の出力値(電圧)を、事前に取得されている出力値と荷重との直線関係(後述する)に基づき、T[N]に変換する。上記60mmの摺動の摺動開始から摺動停止までの間に、13回T[N]を取得し、最初と最後の計2回を除いた11個のT[N]を単純平均することによって、Tave[N]が得られる。
By the
その後、以下の式より動摩擦係数μAを求める。
上記直線関係は以下の通りに得られる。すなわち、可動式ストレインゲージ71に0.4Nの荷重をかけた場合と1.5Nの荷重をかけた場合のそれぞれについて、可動式ストレインゲージ71の出力値(電圧)を得る。得られた2つの出力値と上記2つの荷重とから、出力値と荷重との直線関係が得られる。当該直線関係を用いて、上記のとおり、摺動時の可動式ストレインゲージ71による出力値(電圧)がT[N]に変換される。
The above linear relationship is obtained as follows. That is, the output value (voltage) of the
動摩擦係数μBは、上記他端に付与されるテンションT0[N]を1.2Nとすること以外は動摩擦係数μAの測定方法と同じ方法で測定される。 The dynamic friction coefficient μ B is measured by the same method as the method of measuring the dynamic friction coefficient μ A , except that the tension T 0 [N] applied to the other end is 1.2N.
以上のとおりにして測定された動摩擦係数μAおよび動摩擦係数μBから、摩擦係数比(μB/μA)が算出される。 The friction coefficient ratio (μ B /μ A ) is calculated from the dynamic friction coefficient μ A and the dynamic friction coefficient μ B measured as described above.
磁気テープMTに加わる張力が0.6Nであるときの磁性層43の表面と磁気ヘッド56の間の動摩擦係数をμCとした場合、走行5回目の動摩擦係数μC(5)と走行1000回目の動摩擦係数μC(1000)との摩擦係数比(μC(1000)/μC(5))が、好ましくは1.0以上2.0以下、より好ましくは1.0以上1.5以下である。摩擦係数比(μC(1000)/μC(5))が1.0以上で2.0以下であると、1000回走行後による動摩擦係数の変化を小さくできるため、1000回走行後においても、優れた走行安定性を得ることができる。ここで、磁気ヘッド56としては磁気テープMTに対応したドライブのものを用いるものとする。
Assuming that the dynamic friction coefficient between the surface of the
摩擦係数比(μC(1000)/μC(5))を算出するための動摩擦係数μC(5)および動摩擦係数μC(1000)は以下の通りにして求められる。磁気テープMTの上記他端に付与されるテンションT0[N]を0.6Nとすること以外は動摩擦係数μAの測定方法と同じようにして、磁気テープMTを可動式ストレインゲージ71と繋ぐ。そして、磁気テープMTを、ヘッドブロック74に対して10mm/sにて可動式ストレインゲージへ向かって60mm摺動させ(往路)および可動式ストレインゲージから離れるように60mm摺動させる(復路)。この往復動作を1000回繰り返す。この1000回の往復動作のうち、5回目の往路の60mmの摺動の摺動開始から摺動停止までの間に、ストレインゲージの出力値(電圧)を13回取得し、動摩擦係数μAで求めた出力値と荷重との直線関係(後述する)に基づき、T[N]に変換する。最初と最後の計2回を除いた11個を単純平均することによりTave[N]を求める。以下の式により、動摩擦係数μC(5)を求める。
さらに、動摩擦係数μC(1000)は、1000回目の往路の測定をすること以外は動摩擦係数μC(5)と同様にして求める。 Further, the dynamic friction coefficient μ C (1000) is obtained in the same manner as the dynamic friction coefficient μ C (5) except that the 1000th forward trip is measured.
以上のとおりにして測定された動摩擦係数μC(5)および動摩擦係数μC(1000)から、摩擦係数比μC(1000)/μC(5)が算出される。 A friction coefficient ratio μ C (1000)/μ C (5) is calculated from the dynamic friction coefficient μ C (5) and the dynamic friction coefficient μ C (1000) measured as described above.
[サーボライタの構成]
次に、図11、図12A、図12Bを参照して、上述のサーボパターンの書き込みに用いるサーボライタ210の構成の一例について説明する。
[Configuration of servo writer]
Next, an example of the configuration of the
サーボライタ210は、サーボ信号書込ヘッド219以外は、国際公開第2019/093469号公報に記載されるサーボライタ(特には同文献の図1を参照して説明されたサーボライタ)と同様の構成を有する。サーボ信号書込ヘッド219としては、特開2006−127730号公報に記載されたサーボ信号書込ヘッド(特には同文献の図26を参照して説明されたサーボ信号書込ヘッド)が用いられる。
The
サーボトラックライタ210は、図11に示すように、送出リール211と、巻取リール212と、キャプスタン213A、214Aと、ピンチローラ213B、214Bと、ガイドローラ215A、215Bと、研磨部216と、ダスティング部217と、テンション調整部218と、サーボ信号書込ヘッド219と、サーボ信号読取ヘッド220と、プリアンプ221と、制御装置222と、パルス発生回路223と、駆動装置224とを備える。このサーボトラックライタ210は、長尺の磁気テープMTのサーボバンドにサーボ信号を書き込むための装置である。テンション調整部218は、テンションアーム218Aと、一対の支持部218Bとを備える。
As shown in FIG. 11, the
サーボ信号書込ヘッド219は、図12Aに示すように、ヘッドチップ232を有し、このヘッドチップ232の上面に、リニア型磁気テープ(図示せず)に対する摺動面234を有し、この摺動面234内に、少なくとも、一部がサーボ信号記録用とされた記録用素子からなる磁気ヘッド部235と、周囲が閉じられた有底キャビティ236とが形成される。
As shown in FIG. 12A, the servo
サーボ信号書込ヘッド219の摺動面234は、図12Bに示すように、少なくとも一部がフラット面とされ、この摺動面234に対向配置されるリニア型磁気テープ(図示せず)は、走行時には、磁気ヘッド摺動面234のエッジ部によって近傍の空気をかき取られ、更に有底キャビティ236において減圧されることにより、摺動面234とのスペーシングがより小とされる。
As shown in FIG. 12B, at least a part of the sliding
サーボトラックライタ210に搭載されているキャビティを有するサーボ信号書込ヘッド219と同ヘッドに隣接するガイドローラ215Aおよび215Bの距離を調整し、且つ、サーボ信号書込ヘッド219へのテープ侵入角度を調整することによって、サーボパターンを記録する際のサーボ信号書込ヘッド219と磁気テープMTとの間の摩擦を調整することが可能である。このように摩擦を調整することで、磁気テープMTのσswを調整することが可能である。サーボパターンを記録する際のサーボ信号書込ヘッド219と磁気テープMTとの間の摩擦を低くするほど、σSWは低下する傾向にある。
The servo
[磁気テープの製造方法]
次に、上述の構成を有する磁気テープMTの製造方法の一例について説明する。
[Magnetic tape manufacturing method]
Next, an example of a method of manufacturing the magnetic tape MT having the above configuration will be described.
(塗料の調製工程)
まず、非磁性粉および結着剤等を溶剤に混練、分散させることにより、下地層形成用塗料を調製する。次に、磁性粉および結着剤等を溶剤に混練、分散させることにより、磁性層形成用塗料を調製する。磁性層形成用塗料および下地層形成用塗料の調製には、例えば、以下の溶剤、分散装置および混練装置を用いることができる。
(Paint preparation process)
First, a non-magnetic powder, a binder and the like are kneaded and dispersed in a solvent to prepare a base layer forming coating material. Next, the magnetic powder, the binder and the like are kneaded and dispersed in a solvent to prepare a magnetic layer forming coating material. For the preparation of the magnetic layer-forming coating material and the underlayer-forming coating material, for example, the following solvent, dispersing device and kneading device can be used.
上述の塗料調製に用いられる溶剤としては、例えば、アセトン、メチルエチルケトン、メチルイソブチルケトン、シクロヘキサノン等のケトン系溶媒、メタノール、エタノール、プロパノール等のアルコール系溶媒、酢酸メチル、酢酸エチル、酢酸ブチル、酢酸プロピル、乳酸エチル、エチレングリコールアセテート等のエステル系溶媒、ジエチレングリコールジメチルエーテル、2−エトキシエタノール、テトラヒドロフラン、ジオキサン等のエーテル系溶媒、ベンゼン、トルエン、キシレン等の芳香族炭化水素系溶媒、メチレンクロライド、エチレンクロライド、四塩化炭素、クロロホルム、クロロベンゼン等のハロゲン化炭化水素系溶媒等が挙げられる。これらは単独で用いてもよく、適宜混合して用いてもよい。 Examples of the solvent used for preparing the above-mentioned paint include acetone, methyl ethyl ketone, methyl isobutyl ketone, ketone solvents such as cyclohexanone, alcohol solvents such as methanol, ethanol and propanol, methyl acetate, ethyl acetate, butyl acetate, propyl acetate. , Ethyl lactate, ester solvents such as ethylene glycol acetate, diethylene glycol dimethyl ether, 2-ethoxyethanol, tetrahydrofuran, ether solvents such as dioxane, benzene, toluene, aromatic hydrocarbon solvents such as xylene, methylene chloride, ethylene chloride, Examples thereof include halogenated hydrocarbon solvents such as carbon tetrachloride, chloroform and chlorobenzene. These may be used alone or in an appropriate mixture.
上述の塗料調製に用いられる混練装置としては、例えば、連続二軸混練機、多段階で希釈可能な連続二軸混練機、ニーダー、加圧ニーダー、ロールニーダー等の混練装置を用いることができるが、特にこれらの装置に限定されるものではない。また、上述の塗料調製に用いられる分散装置としては、例えば、ロールミル、ボールミル、横型サンドミル、縦型サンドミル、スパイクミル、ピンミル、タワーミル、パールミル(例えばアイリッヒ社製「DCPミル」等)、ホモジナイザー、超音波分散機等の分散装置を用いることができるが、特にこれらの装置に限定されるものではない。 As the kneading device used for the above-mentioned paint preparation, for example, a kneading device such as a continuous biaxial kneading machine, a continuous biaxial kneading machine capable of diluting in multiple stages, a kneader, a pressure kneader, or a roll kneader can be used. However, it is not particularly limited to these devices. Further, as the dispersing device used for the above-mentioned coating preparation, for example, a roll mill, a ball mill, a horizontal sand mill, a vertical sand mill, a spike mill, a pin mill, a tower mill, a pearl mill (for example, "DCP mill" manufactured by Erich Co., Ltd.), a homogenizer, and A dispersion device such as a sonic disperser can be used, but the device is not particularly limited to these devices.
(塗布工程)
次に、下地層形成用塗料を基体41の一方の主面に塗布して乾燥させることにより、下地層42を形成する。続いて、この下地層42上に磁性層形成用塗料を塗布して乾燥させることにより、磁性層43を下地層42上に形成する。なお、乾燥の際に、例えばソレノイドコイルにより、磁性粉を基体41の厚み方向に磁場配向させる。また、乾燥の際に、例えばソレノイドコイルにより、磁性粉を基体41の走行方向(長手方向)に磁場配向させたのちに、基体41の厚み方向に磁場配向させるようにしてもよい。このように長手方向に磁性粉を一旦配向させる処理を施すことで、磁性粉の垂直配向度(すなわち角形比S1)をさらに向上することができる。磁性層43の形成後、基体41の他方の主面にバック層44を形成する。これにより、磁気テープMTが得られる。
(Coating process)
Next, the underlayer-forming coating material is applied to one main surface of the
角形比S1、S2は、例えば、磁性層形成用塗料の塗膜に印加される磁場の強度、磁性層形成用塗料中における固形分の濃度、磁性層形成用塗料の塗膜の乾燥条件(乾燥温度および乾燥時間)を調整することにより所望の値に設定される。塗膜に印加される磁場の強度は、磁性粉の保磁力の2倍以上3倍以下であることが好ましい。角形比S1をさらに高めるためには(すなわち角形比S2をさらに低めるためには)、磁性層形成用塗料中における磁性粉の分散状態を向上させることが好ましい。また、角形比S1をさらに高めるためには、磁性粉を磁場配向させるための配向装置に磁性層形成用塗料が入る前の段階で、磁性粉を磁化させておくことも有効である。なお、上記の角形比S1、S2の調整方法は単独で使用されてもよいし、2以上組み合わされて使用されてもよい。 The squareness ratios S1 and S2 are, for example, the strength of the magnetic field applied to the coating film of the magnetic layer-forming coating material, the concentration of solids in the magnetic layer-forming coating material, and the drying conditions (drying conditions) of the magnetic layer-forming coating material. It is set to a desired value by adjusting the temperature and the drying time). The strength of the magnetic field applied to the coating film is preferably 2 times or more and 3 times or less the coercive force of the magnetic powder. In order to further increase the squareness ratio S1 (that is, to further reduce the squareness ratio S2), it is preferable to improve the dispersion state of the magnetic powder in the magnetic layer-forming coating material. In order to further increase the squareness S1, it is effective to magnetize the magnetic powder before the magnetic layer-forming coating material enters the orienting device for orienting the magnetic powder in the magnetic field. The methods for adjusting the squareness ratios S1 and S2 may be used alone or in combination of two or more.
(カレンダー工程、転写工程)
その後、得られた磁気テープMTにカレンダー処理を行い、磁性層43の表面を平滑化する。次に、カレンダー処理が施された磁気テープMTをロール状に巻き取ったのち、この状態で磁気テープMTに加熱処理を行うことにより、バック層44の表面の多数の突部44Aを磁性層43の表面に転写する。これにより、磁性層43の表面に多数の孔部43Aが形成される。
(Calendar process, transfer process)
Then, the obtained magnetic tape MT is calendered to smooth the surface of the
加熱処理の温度は、55℃以上75℃以下であることが好ましい。加熱処理の温度が55℃以上であると、良好な転写性を得ることができる。一方、加熱処理の温度が75℃を超えると、細孔量が多くなりすぎ、磁性層43の表面の潤滑剤が過多になってしまう虞がある。ここで、加熱処理の温度は、磁気テープMTを保持する雰囲気の温度である。
The temperature of the heat treatment is preferably 55° C. or higher and 75° C. or lower. When the temperature of the heat treatment is 55° C. or higher, good transferability can be obtained. On the other hand, if the temperature of the heat treatment exceeds 75° C., the amount of pores becomes too large, and the lubricant on the surface of the
加熱処理の時間は、15時間以上40時間以下であることが好ましい。加熱処理の時間が15時間以上であると、良好な転写性を得ることができる。一方、加熱処理の時間が40時間以下であると、生産性の低下を抑制することができる。 The heat treatment time is preferably 15 hours or more and 40 hours or less. When the heat treatment time is 15 hours or more, good transferability can be obtained. On the other hand, when the heat treatment time is 40 hours or less, a decrease in productivity can be suppressed.
(裁断工程)
最後に、磁気テープMTを所定の幅(例えば1/2インチ幅)に裁断する。以上により、磁気テープMTが得られる。
(Cutting process)
Finally, the magnetic tape MT is cut into a predetermined width (for example, 1/2 inch width). From the above, the magnetic tape MT is obtained.
(サーボパターンの書き込み工程)
上述のサーボライタ210によって、磁気テープMTにサーボパターンを書き込む。この際、上述のようにして、サーボパターンを書き込む際のサーボ信号書込ヘッド119と磁気テープMTとの間の摩擦を調整することにより、磁気テープMTの統計値σswを24nm以下に調整することが可能である。
(Servo pattern writing process)
The
[記録再生装置の構成]
記録再生装置50は、上述の構成を有する磁気テープMTの記録および再生を行う。記録再生装置50は、磁気テープMTの長手方向に加わるテンションを調整可能な構成を有している。また、記録再生装置50は、カートリッジ10を装填可能な構成を有している。ここでは、説明を容易とするために、記録再生装置50が、1つのカートリッジ10を装填可能な構成を有している場合について説明するが、記録再生装置50が、複数のカートリッジ10を装填可能な構成を有していてもよい。
[Structure of recording/reproducing apparatus]
The recording/reproducing
記録再生装置50は、ネットワーク60を介してサーバ61およびパーソナルコンピュータ(以下「PC」という。)62等の情報処理装置に接続されており、これらの情報処理装置から供給されたデータをカートリッジ10に記録可能に構成されている。また、これらの情報処理装置からの要求に応じて、カートリッジ10からデータを再生し、これらの情報処理装置に供給可能に構成されている。記録再生装置50の最短記録波長は、好ましくは96nm以下、より好ましくは88nm以下、さらにより好ましくは80nm以下である。
The recording/reproducing
記録再生装置50は、図1に示すように、スピンドル51と、記録再生装置50側のリール52と、スピンドル駆動装置53と、リール駆動装置54と、複数のガイドローラ55と、磁気ヘッド(ヘッドユニット)56と、通信部としてのリーダライタ57と、通信インターフェース(以下、I/F)58と、制御装置59とを備えている。
As shown in FIG. 1, the recording/reproducing
スピンドル51は、カートリッジ10を装着可能に構成されている。磁気テープMTには、サーボ信号としてハの字状のサーボパターンが予め記録されている。リール52は、テープローディング機構(図示せず)を介してカートリッジ10から引き出された磁気テープMTの先端(リーダーピン20)を固定可能に構成される。
The
スピンドル駆動装置53は、制御装置59からの命令に応じて、スピンドル51を回転させる。リール駆動装置54は、制御装置59からの命令に応じて、リール52を回転させる。複数のガイドローラ55は、カートリッジ10とリール52との間に形成されるテープパスが磁気ヘッド56に対して所定の相対位置関係となるように磁気テープMTの走行をガイドする。
The
磁気テープMTに対してデータの記録が行われる際、または磁気テープMTからデータの再生が行われる際には、スピンドル駆動装置53およびリール駆動装置54により、スピンドル51およびリール52が回転駆動され、磁気テープMTが走行する。磁気テープMTの走行方向は、順方向(カートリッジ10側からリール52側に流れる方向)および逆方向(リール52側からカートリッジ10側へ流れる方向)での往復が可能とされている。
When data is recorded on the magnetic tape MT, or when data is reproduced from the magnetic tape MT, the
本実施形態では、スピンドル駆動装置53によるスピンドル51の回転の制御、およびリール駆動装置54によるリール52の回転の制御により、データ記録時またはデータ再生時における磁気テープMTの長手方向のテンションが調整可能とされる。なお、磁気テープMTのテンション調整は、スピンドル51およびリール52の回転の制御に代えて、またはこの制御に加えて、ガイドローラ55の移動の制御により行われてもよい。
In this embodiment, by controlling the rotation of the
リーダライタ57は、制御装置59からの命令に応じて、カートリッジメモリ11に対して第1の情報および第2の情報を書き込むことが可能に構成されている。また、リーダライタ57は、制御装置59からの命令に応じて、カートリッジメモリ11から第1の情報および第2の情報を読み出すことが可能に構成されている。リーダライタ57とカートリッジメモリ11との間の通信方式としては、例えば、ISO14443方式が採用される。第2の情報は、テンション調整情報を含む。テンション調整情報は、データ記録時情報の一例である。
The reader/
制御装置59は、例えば、制御部、記憶部、通信部等を含む。制御部は、例えば、CPU(Central Processing Unit)等により構成されており、記憶部に記憶されたプログラムに従い、記録再生装置50の各部を制御する。例えば、制御装置59は、サーバ61およびPC62等の情報処理装置の要求に応じて、情報処理装置から供給されるデータ信号を磁気ヘッド56により磁気テープMTに記録する。また、制御装置59は、サーバ61およびPC62等の情報処理装置の要求に応じて、磁気ヘッド56により、磁気テープMTに記録されたデータ信号を再生し、情報処理装置に供給する。
The
記憶部は、各種のデータや各種のプログラムが記録される不揮発性のメモリと、制御部の作業領域として用いられる揮発性のメモリとを含む。上記各種のプログラムは、光ディスク等の可搬性の記録媒体または半導体メモリ等の可搬性の記憶装置から読み取られてもよいし、ネットワーク上のサーバ装置からダウンロードされてもよい。 The storage unit includes a non-volatile memory in which various data and various programs are recorded, and a volatile memory used as a work area of the control unit. The various programs may be read from a portable recording medium such as an optical disk or a portable storage device such as a semiconductor memory, or may be downloaded from a server device on the network.
制御装置59は、磁気テープMTに対するデータの記録時または磁気テープMTからデータの再生時に、磁気ヘッド56により、隣接する2本のサーボバンドSBに記録されたサーボ信号を読み取る。制御装置59は、2本のサーボバンドSBから読み取られるサーボ信号を用いて、磁気ヘッド56がサーボパターンを追従するように、磁気ヘッド56の位置を制御する。
The
制御装置59は、磁気テープMTに対するデータの記録時に、隣接する2本のサーボバンドSBから読み取られるサーボ信号の再生波形から、隣接する2本のサーボバンドSB間の距離(磁気テープMTの幅方向における距離)d1を求める。そして、求めた距離をリーダライタ57によりメモリ36に書き込む。
When recording data on the magnetic tape MT, the
制御装置59は、磁気テープMTからのデータの再生時に、隣接する2本のサーボバンドSBから読み取られるサーボ信号の再生波形から、隣接する2本のサーボバンドSB間の距離(磁気テープMTの幅方向における距離)d2を求める。それと共に、制御装置59は、リーダライタ57によりメモリ36から、磁気テープMTに対するデータの記録時に求めた、隣接する2本のサーボバンドSB間の距離d1を読み出す。制御装置59は、磁気テープMTに対するデータの記録時に求めたサーボバンドSB間の距離d1と、磁気テープMTからのデータの再生時に求めたサーボバンドSB間の距離d2との差分Δdが規定の範囲内になるように、スピンドル駆動装置53およびリール駆動装置54の回転を制御し、磁気テープMTの長手方向にかかるテンションを調整する。このテンション調整の制御は、例えばフィードバック制御により行われる。
At the time of reproducing the data from the magnetic tape MT, the
磁気ヘッド56は、制御装置59からの指令に応じて、磁気テープMTに対してデータを記録することが可能に構成されている。また、磁気ヘッド56は、制御装置59からの指令に応じて、磁気テープMTに記録されたデータを再生することが可能に構成されている。磁気ヘッド56は、例えば、2つのサーボリードヘッド56A、56Bおよび複数のデータライト/リードヘッド等を有している。
The
サーボリードヘッド56A、56Bは、磁気テープMTに記録されたサーボ信号から発生する磁界をMR素子(MR:Magneto Resistive)等により読み取ることで、サーボ信号を再生可能に構成されている。2つのサーボリードヘッド56A、56Bの幅方向の間隔は、隣接する2本のサーボバンドSB間の距離と略同じとされている。
The servo read
データライト/リードヘッドは、2つのサーボリードヘッド56A、56Bに挟み込まれる位置に、一方のサーボリードヘッド56A、56Bから他方のサーボリードヘッド56A、56Bに向かう方向に沿って等間隔に配置されている。データライト/リードヘッドは、磁気ギャップから発生する磁界によって、磁気テープMTに対してデータを記録することが可能に構成されている。また、データライト/リードヘッドは、磁気テープMTに記録されたデータから発生する磁界をMR素子等により読み取ることで、データを再生可能に構成されている。
The data write/read heads are arranged at positions sandwiched by the two servo read heads 56A and 56B at equal intervals along the direction from one
通信I/F58は、サーバ61およびPC62等の情報処理装置と通信するためのものであり、ネットワーク60に対して接続される。
The communication I/
[データ記録時における記録再生装置の動作]
以下、図13を参照して、データ記録時における記録再生装置50の動作の一例について説明する。
[Operation of recording/reproducing apparatus during data recording]
An example of the operation of the recording/reproducing
まず、制御装置59は、記録再生装置50にカートリッジ10をローディングする(ステップS11)。次に、制御装置59は、スピンドル51およびリール52の回転を制御し、磁気テープMTの長手方向に規定のテンションをかけながら磁気テープMTを走行させる。そして、制御装置59は、磁気ヘッド56のサーボリードヘッド56A、56Bによりサーボ信号を読み取ると共に、磁気ヘッド56のデータライト/リードヘッドにより磁気テープMTに対してデータを記録する(ステップS12)。
First, the
このとき、磁気ヘッド56は、磁気ヘッド56の2つのサーボリードヘッド56A、56Bにより隣接する2本のサーボバンドSBをトレースしながら、磁気ヘッド56のデータライト/リードヘッドによりデータバンドDBに対してデータを記録する。
At this time, the
次に、制御装置59は、磁気ヘッド56のサーボリードヘッド56A、56Bにより読み取られたサーボ信号の再生波形から、データ記録時における、隣接する2本のサーボバンドSB間の距離d1を求める(ステップS13)。次に、制御装置59は、リーダライタ57により、データ記録時のサーボバンドSB間の距離d1をカートリッジメモリ11に書き込む(ステップS14)。制御装置59は、サーボバンドSB間の距離d1を連続的に計測し、カートリッジメモリ11に書き込んでもよいし、サーボバンド間の距離d1を一定間隔で計測し、カートリッジメモリ11に書き込んでもよい。サーボバンドSB間の距離d1を一定間隔で計測し、カートリッジメモリ11に書き込む場合には、メモリ36に書き込まれる情報量を低減することができる。
Next, the
[データ再生時における記録再生装置の動作]
以下、図14を参照して、データ再生時における記録再生装置50の動作の一例について説明する。
[Operation of recording/reproducing apparatus during data reproduction]
An example of the operation of the recording/reproducing
まず、制御装置59は、記録再生装置50にカートリッジ10をローディングする(ステップS21)。次に、制御装置59は、リーダライタ57によりカートリッジメモリ11から記録時のサーボバンド間の距離d1を読み出す(ステップS22)。
First, the
次に、制御装置59は、スピンドル51およびリール52の回転を制御し、磁気テープMTの長手方向に規定のテンションをかけながら磁気テープMTを走行させる。そして、制御装置59は、磁気ヘッド56のサーボリードヘッド56A、56Bによりサーボ信号を読み取ると共に、磁気ヘッド56のデータライト/リードヘッドにより磁気テープMTからデータを再生する(ステップS23)。
Next, the
次に、制御装置59は、磁気ヘッド56のサーボリードヘッド56A、56Bにより読み取られたサーボ信号の再生波形から、データ再生時における、隣接する2本のサーボバンドSB間の距離d2を算出する(ステップS24)。
Next, the
次に、制御装置59は、ステップS22において読み出したサーボバンド間の距離d1と、ステップS24において算出したサーボバンドSB間の距離d2との差分Δdが規定値以内であるか否かを判断する(ステップS25)。
Next, the
ステップS25にて差分Δdが規定値以内であると判断された場合には、制御装置59は、規定のテンションが維持されるように、スピンドル51およびリール52の回転を制御する(ステップS26)。
When it is determined in step S25 that the difference Δd is within the specified value, the
一方、ステップS25にて差分Δdが規定値以内でないと判断された場合には、制御装置59は、差分Δdが小さくなるように、スピンドル51およびリール52の回転の制御し、走行する磁気テープMTにかかるテンションを調整し、処理をステップS24に戻す(ステップS27)。
On the other hand, when it is determined in step S25 that the difference Δd is not within the specified value, the
[効果]
以上説明したように、第1の実施形態に係る磁気テープMTでは、磁気テープMTが洗浄、乾燥された状態において測定された、磁気テープMTの全体のBET比表面積が3.5m2/g以上7.0m2/g以下であり、サーボパターンの非直線性を示す統計値σSWが24nmであるため、磁気テープMTの全厚が薄い場合であっても、優れた走行安定性を得ることができる。また、磁性層43の表面の算術平均粗さRaが2.5nm以下であり、磁性層43の垂直方向における角形比が65%であり、磁性層43の平均厚みが80nmであるため、優れた電磁変換特性を得ることができる。したがって、優れた走行安定性と電磁変換特性を両立することができる。
[effect]
As described above, in the magnetic tape MT according to the first embodiment, the entire BET specific surface area of the magnetic tape MT measured in the washed and dried state of the magnetic tape MT is 3.5 m 2 /g or more. Since it is 7.0 m 2 /g or less and the statistical value σ SW indicating the nonlinearity of the servo pattern is 24 nm, excellent running stability can be obtained even when the total thickness of the magnetic tape MT is thin. You can Further, the arithmetic average roughness Ra of the surface of the
さらに、第1の実施形態に係る磁気テープMTでは、基体41は、ポリエステルを含む。これにより、上記データトラック幅でデータを記録した磁気テープMT(カートリッジ10)の周囲の環境温度や湿度の変化に伴い、磁気テープMTの幅が変化した場合には、走行時に磁気テープMTの長手方向のテンションを記録再生装置50により調整することで、磁気テープMTの幅を一定またはほぼ一定に保つことができる。したがって、環境温度や湿度の変化に起因するオフトラックを抑制することができる。
Furthermore, in the magnetic tape MT according to the first embodiment, the
<2 第2の実施形態>
[記録再生装置の構成]
図15は、本開示の第2の実施形態に係る記録再生システム100Aの構成の一例を示す概略図である。記録再生システム100Aは、カートリッジ10と、記録再生装置50Aとを備える。
<2 Second Embodiment>
[Structure of recording/reproducing apparatus]
FIG. 15 is a schematic diagram showing an example of the configuration of a recording/reproducing
記録再生装置50Aは、温度計63と、湿度計64とをさらに備える。温度計63は、磁気テープMT(カートリッジ10)の周囲の温度を測定し、制御装置59へ出力する。また、湿度計64は、磁気テープMT(カートリッジ10)の周囲の湿度を測定し、制御装置59へ出力する。
The recording/reproducing
制御装置59は、磁気テープMTに対するデータの記録時に、温度計63および湿度計64により、磁気テープMT(カートリッジ10)の周囲の温度Tm1および湿度H1を測定し、リーダライタ57を介してカートリッジメモリ11に書き込む。温度Tm1および湿度H1は、磁気テープMTの周囲の環境情報の一例である。
The
制御装置59は、磁気テープMTに対するデータの記録時に、スピンドル51およびリール52の駆動データに基づいて、磁気テープMTの長手方向にかけられていたテンションTn1を求め、リーダライタ57を介してカートリッジメモリ11に書き込む。
At the time of recording data on the magnetic tape MT, the
制御装置59は、磁気テープMTに対するデータの記録時に、隣接する2本のサーボバンドSBから読み取られるサーボ信号の再生波形から、隣接する2本のサーボバンドSB間の距離d1を求める。そして、この距離d1に基づいて、データ記録時の磁気テープMTの幅W1を算出し、リーダライタ57によりメモリ36に書き込む。
The
制御装置59は、磁気テープMTからのデータの再生時に、温度計63および湿度計64により、磁気テープMT(カートリッジ10)の周囲の温度Tm2および湿度H2を測定する。
The
制御装置59は、磁気テープMTからのデータの再生時に、スピンドル51およびリール52の駆動データに基づいて、磁気テープMTの長手方向にかけられていたテンションTn2を求める。
The
制御装置59は、磁気テープMTからのデータの再生時に、隣接する2本のサーボバンドSBから読み取られるサーボ信号の再生波形から、隣接する2本のサーボバンドSB間の距離d2を求める。そして、この距離d2に基づいて、データ再生時の磁気テープMTの幅W2を算出する。
The
制御装置59は、磁気テープMTからのデータの再生時に、リーダライタ57を介してカートリッジメモリ11から、データ記録時に書き込んだ温度Tm1、湿度H1、テンションTn1および幅W1を読み出す。そして、制御装置59は、データの記録時における温度Tm1、湿度H1、テンションTn1および幅W1と、データの再生時における温度Tm2、湿度H2、テンションTn2および幅W2を用いて、データ再生時における磁気テープMTの幅W2がデータ記録時における磁気テープの幅W1に等しくまたはほぼ等しくなるように、磁気テープMTにかけるテンションを制御する。
The
カートリッジメモリ11のコントローラ35は、アンテナコイル31を介して記録再生装置50Aから受信した温度Tm1、湿度H1、テンションTn1および幅W1をメモリ36の第2の記憶領域36Bに記憶する。カートリッジメモリ11のコントローラ35は、記録再生装置50Aからの要求に応じて、メモリ36から温度Tm1、湿度H1、テンションTn1および幅W1を読み出し、アンテナコイル31を介して記録再生装置50Aに送信する。
The
[データ記録時における記録再生装置の動作]
以下、図16を参照して、データ記録時における記録再生装置50Aの動作の一例について説明する。
[Operation of recording/reproducing apparatus during data recording]
Hereinafter, an example of the operation of the recording/reproducing
まず、制御装置59は、記録再生装置50Aにカートリッジ10をローディングする(ステップS101)。次に、制御装置59は、スピンドル51およびリール52の回転を制御し、磁気テープMTの長手方向に規定のテンションをかけながら磁気テープMTを走行させる。そして、制御装置59は、磁気ヘッド56により磁気テープMTに対してデータを記録する(ステップS102)。
First, the
次に、制御装置59は、温度計63および湿度計64から、データ記録時における磁気テープMTの周囲の温度Tm1および湿度H1(環境情報)を取得する(ステップS103)。
Next, the
次に、制御装置59は、データ記録時におけるスピンドル51およびリール52の駆動データに基づいて、データ記録時において磁気テープMTの長手方向にかけられていたテンションTn1を算出する(ステップS104)。
Next, the
次に、制御装置59は、磁気ヘッド56のサーボリードヘッド56A、56Bにより読み取られたサーボ信号の再生波形から、隣接する2本のサーボバンドSBの距離d1を求める。次に、制御装置59は、この距離d1に基づいて、データ記録時の磁気テープMTの幅W1を算出する(ステップS105)。
Next, the
次に、制御装置59は、リーダライタ57により、温度Tm1、湿度H1、テンションTn1および磁気テープMTの幅W1をデータ記録時情報としてカートリッジメモリ11に書き込む(ステップS106)。
Next, the
[データ再生時における記録再生装置の動作]
以下、図17を参照して、データ再生時における記録再生装置50Aの動作の一例について説明する。
[Operation of recording/reproducing apparatus during data reproduction]
An example of the operation of the recording/reproducing
まず、制御装置59は、記録再生装置50Aにカートリッジ10をローディングする(ステップS111)。次に、制御装置59は、カートリッジメモリ11に書き込まれたデータ記録時情報(温度Tm1、湿度H1、テンションTn1および磁気テープMTの幅W1)を、リーダライタ57によりカートリッジメモリ11から読み出して取得する(ステップS112)。次に、制御装置59は、温度計63および湿度計64により、データ再生時における現在の磁気テープMTの周囲の温度Tm2の情報および湿度H2の情報を取得する(ステップS113)。
First, the
次に、制御装置59は、データ記録時における温度Tm1と、データ再生時における温度Tm2との温度差TmD(TmD=Tm2−Tm1)を算出する(ステップS114)。また、制御装置59は、データ記録時における湿度H1と、データ再生時における湿度H2との湿度差HD(HD=H2−H1)を算出する(ステップS115)。
Next, the
次に、制御装置59は、温度差TmDに係数αを乗算し(TmD×α)、湿度差HDに係数βを乗算する(HD×β)(ステップS116)。係数αは、温度差1℃当たり、磁気テープMTのテンションをデータ記録時のテンションTn1と比べてどの程度変更すればよいかを示す値である。係数βは、湿度差1%あたり、磁気テープMTのテンションをデータ記録時のテンションTn1と比べてどの程度変更すればよいかを示す値である。
Next, the
次に、制御装置59は、データ記録時におけるテンションTn1に対して、TmD×αの値と、HD×βの値とを加算することで、データ再生時(現在)において、磁気テープMTの長手方向にかけるべきテンションTn2を算出する(ステップS117)。
Tn2=Tn1+TmD×α+HD×β
Next, the
Tn2=Tn1+TmD×α+HD×β
データ再生時における磁気テープMTのテンションTn2を決定した後、制御装置59は、スピンドル51およびリール52の回転を制御し、そのテンションTn2で磁気テープMTが走行するように磁気テープMTの走行を制御する。そして、制御装置59は、磁気ヘッド56のサーボリードヘッド56A、56BによりサーボバンドSBのサーボ信号を読み取りながら、磁気ヘッド56のデータライト/リードヘッドにより、データトラックTkに記録されたデータの再生を行う(ステップS118)。
After determining the tension Tn2 of the magnetic tape MT at the time of data reproduction, the
このとき、磁気テープMTのテンションの調整により、磁気テープMTの幅がデータ記録時の幅に合わせられているので、磁気ヘッド56のデータライト/リードヘッドは、データトラックTkに対して正確に位置合わせすることができる。これにより、何らかの原因(例えば、温度、湿度の変動)で、磁気テープMTの幅が変動したような場合でも、磁気テープMTに記録されたデータを正確に再生することができる。
At this time, since the width of the magnetic tape MT is adjusted to the width at the time of data recording by adjusting the tension of the magnetic tape MT, the data write/read head of the
なお、データ再生時(現在)において、磁気テープMTにかけるべきテンションTn2の値は、データ再生時の温度の方がデータ記録時の温度よりも高ければ高くなる。このため、温度が高くなり、データ記録時よりも磁気テープMTの幅が広くなってしまった場合には、磁気テープMTの幅を狭めてデータ再生時と同じ幅を再現することができる。 The value of the tension Tn2 to be applied to the magnetic tape MT at the time of data reproduction (current) is higher if the temperature at the time of data reproduction is higher than the temperature at the time of data recording. Therefore, when the temperature rises and the width of the magnetic tape MT becomes wider than that during data recording, the width of the magnetic tape MT can be narrowed to reproduce the same width as during data reproduction.
逆に、データ再生時(現在)において、磁気テープMTにかけるべきテンションTn2の値は、データ再生時の温度の方がデータ記録時の温度よりも低ければ低くなる。このため、温度が低くなり、データ記録時よりも磁気テープMTの幅が狭くなってしまった場合には、磁気テープMTの幅を広げてデータ再生時と同じ幅を再現することができる。 On the contrary, at the time of data reproduction (current), the value of the tension Tn2 to be applied to the magnetic tape MT becomes lower if the temperature at the time of data reproduction is lower than the temperature at the time of data recording. Therefore, when the temperature becomes lower and the width of the magnetic tape MT becomes narrower than that at the time of data recording, the width of the magnetic tape MT can be widened to reproduce the same width as at the time of data reproduction.
また、データ再生時(現在)において、磁気テープMTにかけるべきテンションTn2の値は、データ再生時の湿度の方がデータ記録時の湿度よりも高ければ高くなる。このため、湿度が高くなり、データ記録時よりも磁気テープMTの幅が広くなってしまった場合には、磁気テープMTの幅を狭めてデータ再生時と同じ幅を再現することができる。 The value of the tension Tn2 to be applied to the magnetic tape MT at the time of data reproduction (current) becomes higher if the humidity at the time of data reproduction is higher than the humidity at the time of data recording. Therefore, when the humidity becomes high and the width of the magnetic tape MT becomes wider than that at the time of data recording, the width of the magnetic tape MT can be narrowed to reproduce the same width as at the time of data reproduction.
逆に、データ再生時(現在)において、磁気テープMTにかけるべきテンションTn2の値は、データ再生時の湿度の方がデータ記録時の湿度よりも低ければ低くなる。このため、湿度が低くなり、データ記録時よりも磁気テープMTの幅が狭くなってしまった場合には、磁気テープMTの幅を広げてデータ再生時と同じ幅を再現することができる。 On the contrary, at the time of data reproduction (current), the value of the tension Tn2 to be applied to the magnetic tape MT becomes lower if the humidity at the time of data reproduction is lower than the humidity at the time of data recording. Therefore, when the humidity becomes low and the width of the magnetic tape MT becomes narrower than that at the time of data recording, the width of the magnetic tape MT can be widened to reproduce the same width as at the time of data reproduction.
ここで、データ再生時において、磁気テープMTにかけるべきテンションTn2を求めるために、データ記録時の温度Tm1、湿度H1、磁気テープMTのテンションTn1に加えて(あるいは、テンションTn1に代えて)、さらに、データ記録時における磁気テープMTの幅W1の情報が用いられてもよい。 Here, in order to obtain the tension Tn2 to be applied to the magnetic tape MT during data reproduction, in addition to the temperature Tm1 during recording of data, the humidity H1, and the tension Tn1 of the magnetic tape MT (or instead of the tension Tn1), Further, information on the width W1 of the magnetic tape MT at the time of recording data may be used.
この場合も、同様に、制御装置59は、温度差TmD(TmD=Tm2−Tm1)と、湿度差HD(HD=H2−H1)とを算出する。そして、制御装置59は、温度差TmDに係数γを乗算し(TmD×γ)、湿度差HDに係数δを乗算する(HD×δ)(ステップS116)。
In this case as well, the
ここで、係数γは、温度差1℃当たり磁気テープMTの幅がどの程度変動するかを示す値(温度に基づく単位長さ(幅方向)当たりの膨張率を示す値)である。また、係数δは、湿度差1%あたり、磁気テープMTの幅がどの程度変動するかを示す値(湿度に基づく単位長さ(幅方向)当たりの膨張率を示す値)である。 Here, the coefficient γ is a value (a value indicating an expansion coefficient per unit length (width direction) based on temperature) indicating how much the width of the magnetic tape MT varies per 1° C. of temperature difference. Further, the coefficient δ is a value (a value indicating an expansion coefficient per unit length (width direction) based on humidity) indicating how much the width of the magnetic tape MT fluctuates per humidity difference of 1%.
次に、制御装置59は、以下の式により、データ記録時における過去の磁気テープMTの幅W1に基づいて、データ再生時における現在の磁気テープMTの幅w2を予測する。
W2=W1(1+TmD×γ+HD2×δ)
Next, the
W2=W1 (1+TmD×γ+HD2×δ)
次に、制御装置59は、データ再生時における現在の磁気テープMTの幅w2と、データ記録時における過去の磁気テープMTの幅W1との差WDを算出する(WD=W2−W1=W1(TmD×γ+HD2×δ))。
Next, the
そして、制御装置59は、幅の差WDに係数εを乗算した値を、データ記録時における磁気テープMTのテンションTn1に加算して、データ再生時における磁気テープMTのテンションTn2を算出する
Tn2=Tn1+WD×ε
Then, the
ここで、係数εは、磁気テープMTの幅を単位距離分変化させるために必要な磁気テープMTの長手方向でのテンションを表す値である。 Here, the coefficient ε is a value representing the tension in the longitudinal direction of the magnetic tape MT, which is necessary to change the width of the magnetic tape MT by a unit distance.
データ再生時における磁気テープMTのテンションTn2を決定した後、制御装置59は、スピンドル51およびリール52の回転を制御し、そのテンションTn2で磁気テープMTが走行するように磁気テープMTの走行を制御する。そして、制御装置59は、磁気ヘッド56のサーボリードヘッド56A、56BによりサーボバンドSBのサーボ信号を読み取りながら、磁気ヘッド56のデータライト/リードヘッドにより、データトラックTkに記録されたデータの再生を行う。
After determining the tension Tn2 of the magnetic tape MT at the time of data reproduction, the
このような方法でテンションTn2が決定された場合においても、何らかの原因(例えば、温度、湿度の変動)で、磁気テープMTの幅が変動したような場合に、磁気テープMTに記録されたデータを正確に再生することができる。 Even when the tension Tn2 is determined by such a method, if the width of the magnetic tape MT changes due to some cause (for example, changes in temperature and humidity), the data recorded on the magnetic tape MT is changed. Can be reproduced accurately.
[効果]
以上説明したように、第2の実施形態では、磁気テープMTのデータ記録時情報がカートリッジメモリ11に記憶されているので、この情報をデータ再生時に利用することで、磁気テープMTの幅を適切に調整することができる。したがって、磁気テープMTの幅が何らかの理由で変動したような場合でも、磁気テープMTに記録されたデータを正確に再生することができる。
[effect]
As described above, in the second embodiment, the data recording information of the magnetic tape MT is stored in the
また、本実施形態では、データ記録時情報として、データ記録時における磁気テープMTの周囲の温度Tm1および湿度H1(環境情報)が書き込まれる。したがって、温度および湿度の変動による、磁気テープMTの幅およびデータトラックTkの幅の変動に適切に対応することができる。 Further, in the present embodiment, the temperature Tm1 and the humidity H1 (environmental information) around the magnetic tape MT at the time of data recording are written as the data recording information. Therefore, variations in the width of the magnetic tape MT and the width of the data track Tk due to variations in temperature and humidity can be appropriately dealt with.
<3 変形例>
(変形例1)
上述の第1、第2の実施形態では、テンション調整情報がカートリッジメモリ11に記憶される場合について説明したが、テンション調整情報が記録再生装置50、50Aの制御装置59に記憶されていてもよい。この場合、制御装置59は、当該制御装置59が記憶しているテンション調整情報により、スピンドル駆動装置53およびリール駆動装置54の回転を制御し、磁気テープMTの長手方向にかかるテンションを調整する。
<3 modification>
(Modification 1)
In the first and second embodiments described above, the case where the tension adjustment information is stored in the
(変形例2)
磁気テープMTをライブラリ装置に用いるようにしてもよい。この場合、ライブラリ装置は、磁気テープMTの長手方向に加わるテンションを調整可能な構成を有しており、第1の実施形態における記録再生装置50または第2の実施形態における記録再生装置50Aを複数備えるものであってもよい。
(Modification 2)
The magnetic tape MT may be used in the library device. In this case, the library device has a configuration in which the tension applied in the longitudinal direction of the magnetic tape MT can be adjusted, and a plurality of recording/reproducing
(変形例3)
サーボライタが、サーボ信号の記録時等に磁気テープMTの長手方向のテンションを調整することで、磁気テープMTの幅を一定またはほぼ一定に保つようにしてもよい。この場合、サーボライタが、磁気テープMTの幅を検出する検出装置を備え、この検出装置の検出結果に基づき、磁気テープMTの長手方向のテンションを調整するようにしてもよい。
(Modification 3)
The servo writer may keep the width of the magnetic tape MT constant or almost constant by adjusting the tension in the longitudinal direction of the magnetic tape MT when recording a servo signal or the like. In this case, the servo writer may include a detection device that detects the width of the magnetic tape MT, and the tension in the longitudinal direction of the magnetic tape MT may be adjusted based on the detection result of this detection device.
(変形例4)
磁気テープMTは、垂直記録型の磁気テープに限定されるものであなく、水平記録型の磁気テープであってもよい。この場合、磁性粉としてはメタル磁性粉等の針状磁性粉を用いてもよい。
(Modification 4)
The magnetic tape MT is not limited to the perpendicular recording type magnetic tape, but may be a horizontal recording type magnetic tape. In this case, acicular magnetic powder such as metal magnetic powder may be used as the magnetic powder.
(変形例5)
上述の第1の実施形態では、データ記録時における磁気テープに関連する幅関連情報として、サーボバンドSB間の距離を用いる場合について説明したが、磁気テープMTの幅を用いるようにしてもよい。
(Modification 5)
In the above-described first embodiment, the case where the distance between the servo bands SB is used as the width-related information related to the magnetic tape at the time of data recording has been described, but the width of the magnetic tape MT may be used.
この場合、制御装置59は、データ記録時に、サーボバンドSB間の距離d1から磁気テープMTの幅W1を算出し、この幅W1をリーダライタ57によりカートリッジメモリ11に書き込む。
In this case, the
制御装置59は、データ再生時に、カートリッジメモリ11からデータ記録時の磁気テープMTの幅W1をカートリッジメモリ11から読み出すと共に、データ再生時のサーボバンドSB間の距離d2からデータ再生時の磁気テープMTの幅W2を算出する。そして、制御装置59は、データ記録時の磁気テープMTの幅W1と、データ再生時の磁気テープMTの幅W2との差分ΔWを算出し、差分ΔWが規定値以内であるか否かを判断する。
The
差分Δdが規定値以内である場合には、制御装置59は、規定のテンションが維持されるように、スピンドル51およびリール52の回転駆動を制御する。一方、差分Δdが規定値以内でない場合には、差分Δdが規定値以内に収まるように、スピンドル51およびリール52の回転駆動の制御し、走行する磁気テープMTにかかるテンションを調整する。
When the difference Δd is within the specified value, the
(変形例6)
上述の第2の実施形態では、データ記録時情報として、温度Tm1、Tm2、湿度H1、H2、テンションTn1、Tn2、幅W1、W2の全てが用いられる場合について説明したが、データ記録時情報は、温度Tm1、Tm2、湿度H1、H2、テンションTn1、Tn2、および幅W1、W2のうちいずれか1つであってもよいし、任意の2つ、3つの組合せであってもよい。
(Modification 6)
In the above-described second embodiment, the case where all of the temperatures Tm1, Tm2, the humidity H1, H2, the tensions Tn1, Tn2, and the widths W1, W2 are used as the data recording time information has been described. , Temperature Tm1, Tm2, humidity H1, H2, tensions Tn1, Tn2, and widths W1, W2, or a combination of any two or three.
カートリッジメモリ11に対して、データ記録時の情報(温度Tm1、湿度H1、テンションTn1、幅W1)だけでなく、データ再生時の情報(温度Tm2、湿度H2、テンションTn2、幅W2)が記憶されてもよい。例えば、このデータ再生時の情報は、データが再生された後、さらに別の機会に磁気テープMT内のデータが再生されるときに使用される。
Information (temperature Tm2, humidity H2, tension Tn2, width W2) at the time of data reproduction is stored in the
(変形例7)
上述の第1、第2の実施形態では、バック層44の表面に設けられた多数の突部44Aを、磁性層43の表面に転写することにより、磁性層43の表面に多数の孔部43Aを形成する場合について説明したが、多数の孔部43Aの形成方法はこれに限定されるものではない。例えば、磁性層形成用塗料に含まれる溶剤の種類および磁性層形成用塗料の乾燥条件等を調整することで、磁性層43の表面に多数の孔部43Aを形成するようにしてもよい。
(Modification 7)
In the first and second embodiments described above, by transferring the large number of
以下、実施例により本開示を具体的に説明するが、本開示はこれらの実施例のみに限定されるものではない。 Hereinafter, the present disclosure will be specifically described with reference to examples, but the present disclosure is not limited to these examples.
以下の実施例および比較例において、磁気テープの平均厚み、磁性層の表面の算術平均粗さRa、垂直方向における角形比、磁性層の平均厚み、BET比表面積、細孔分布(脱着時最大細孔容積の細孔直径)、およびサーボパターンの非直線性を示す統計値σSWは、上述の第1の実施形態にて説明した測定方法により求められた値である。 In the following examples and comparative examples, the average thickness of the magnetic tape, the arithmetic average roughness Ra of the surface of the magnetic layer, the squareness ratio in the vertical direction, the average thickness of the magnetic layer, the BET specific surface area, the pore distribution (the maximum fineness during desorption). The pore diameter of the pore volume) and the statistical value σ SW indicating the non-linearity of the servo pattern are values obtained by the measuring method described in the first embodiment.
[実施例1]
(磁性層形成用塗料の調製工程)
磁性層形成用塗料を以下のようにして調製した。まず、下記配合の第1組成物をエクストルーダで混練した。次に、ディスパーを備えた攪拌タンクに、混練した第1組成物と、下記配合の第2組成物を加えて予備混合を行った。続いて、さらにサンドミル混合を行い、フィルター処理を行い、磁性層形成用塗料を調製した。
[Example 1]
(Preparation process of paint for forming magnetic layer)
A magnetic layer-forming coating material was prepared as follows. First, the first composition having the following composition was kneaded with an extruder. Then, the kneaded first composition and the second composition having the following composition were added to a stirring tank equipped with a disper, and premixed. Subsequently, sand mill mixing was further performed and filter treatment was performed to prepare a magnetic layer-forming coating material.
(第1組成物)
バリウムフェライト(BaFe12O19)粒子の粉末(六角板状、平均アスペクト比
2.8、平均粒子体積1600nm3):100質量部
塩化ビニル系樹脂(樹脂溶液:樹脂分30質量%、シクロヘキサノン70質量%):42質量部(溶剤含む)
(重合度300、Mn=10000、極性基としてOSO3K=0.07mmol/g、2級OH=0.3mmol/gを含有する。)
酸化アルミニウム粉末:5質量部
(α−Al2O3、平均粒径0.1μm)
カーボンブラック:2質量部
(東海カーボン社製、商品名:シーストTA)
(First composition)
Powder of barium ferrite (BaFe 12 O 19 ) particles (hexagonal plate shape, average aspect ratio 2.8, average particle volume 1600 nm 3 ): 100 parts by mass Vinyl chloride resin (resin solution: resin content 30% by mass, cyclohexanone 70% by mass) %): 42 parts by mass (including solvent)
(The degree of polymerization is 300, Mn=10000, and OSO 3 K=0.07 mmol/g as a polar group, and secondary OH=0.3 mmol/g is contained.)
Aluminum oxide powder: 5 parts by mass (α-Al 2 O 3 , average particle size 0.1 μm)
Carbon black: 2 parts by mass (manufactured by Tokai Carbon Co., Ltd., product name: Seast TA)
(第2組成物)
塩化ビニル系樹脂:3質量部(溶剤含む)
(樹脂溶液:樹脂分30質量%、シクロヘキサノン70質量%)
n−ブチルステアレート:2質量部
メチルエチルケトン:121.3質量部
トルエン:121.3質量部
シクロヘキサノン:60.7質量部
(Second composition)
Vinyl chloride resin: 3 parts by mass (including solvent)
(Resin solution: resin content 30% by mass, cyclohexanone 70% by mass)
n-Butyl stearate: 2 parts by mass Methyl ethyl ketone: 121.3 parts by mass Toluene: 121.3 parts by mass Cyclohexanone: 60.7 parts by mass
最後に、上述のようにして調製した磁性層形成用塗料に、硬化剤としてポリイソシアネート(商品名:コロネートL、東ソー株式会社):4質量部と、潤滑剤としてステアリン酸:2質量部とを添加した。 Finally, in the magnetic layer-forming coating material prepared as described above, 4 parts by mass of polyisocyanate (trade name: Coronate L, Tosoh Corporation) as a curing agent and 2 parts by mass of stearic acid as a lubricant are added. Was added.
(下地層形成用塗料の調製工程)
下地層形成用塗料を以下のようにして調製した。まず、下記配合の第3組成物をエクストルーダで混練した。次に、ディスパーを備えた攪拌タンクに、混練した第3組成物と、下記配合の第4組成物を加えて予備混合を行った。続いて、さらにサンドミル混合を行い、フィルター処理を行い、下地層形成用塗料を調製した。
(Preparation process of paint for forming underlayer)
A base layer-forming coating material was prepared as follows. First, the third composition having the following composition was kneaded with an extruder. Next, the kneaded third composition and the fourth composition having the following composition were added to a stirring tank equipped with a disper and premixed. Subsequently, sand mill mixing was further performed and filter treatment was performed to prepare a coating material for forming an underlayer.
(第3組成物)
針状酸化鉄粉末:100質量部
(α−Fe2O3、平均長軸長0.15μm)
塩化ビニル系樹脂:60.6質量部(溶剤含む)
(樹脂溶液:樹脂分30質量%、シクロヘキサノン70質量%)
カーボンブラック:10質量部
(平均粒径20nm)
(Third composition)
Needle-shaped iron oxide powder: 100 parts by mass (α-Fe 2 O 3 , average major axis length 0.15 μm)
Vinyl chloride resin: 60.6 parts by mass (including solvent)
(Resin solution: resin content 30% by mass, cyclohexanone 70% by mass)
Carbon black: 10 parts by mass (
(第4組成物)
ポリウレタン系樹脂UR8200(東洋紡績製):18.5質量部
n−ブチルステアレート:2質量部
メチルエチルケトン:108.2質量部
トルエン:108.2質量部
シクロヘキサノン:18.5質量部
(Fourth composition)
Polyurethane resin UR8200 (manufactured by Toyobo): 18.5 parts by mass n-butyl stearate: 2 parts by mass Methyl ethyl ketone: 108.2 parts by mass Toluene: 108.2 parts by mass Cyclohexanone: 18.5 parts by mass
最後に、上述のようにして調製した下地層形成用塗料に、硬化剤としてポリイソシアネート(商品名:コロネートL、東ソー株式会社):4質量部と、潤滑剤としてステアリン酸:2質量部とを添加した。 Finally, in the undercoat-forming coating material prepared as described above, 4 parts by mass of polyisocyanate (trade name: Coronate L, Tosoh Corporation) as a curing agent and 2 parts by mass of stearic acid as a lubricant are added. Was added.
(バック層形成用塗料の調製工程)
バック層形成用塗料を以下のようにして調製した。下記原料を、ディスパーを備えた攪拌タンクで混合を行い、フィルター処理を行うことで、バック層形成用塗料を調製した。
小粒径のカーボンブラックの粉末(平均粒径(D50)20nm):90質量部
大粒径のカーボンブラックの粉末(平均粒径(D50)270nm):10質量部
ポリエステルポリウレタン:100質量部
(東ソー株式会社、商品名:N−2304)
メチルエチルケトン:500質量部
トルエン:400質量部
シクロヘキサノン:100質量部
(Preparation process of back layer paint)
The back layer forming coating material was prepared as follows. The following raw materials were mixed in a stirring tank equipped with a disper and filtered to prepare a back layer-forming coating material.
Small particle size carbon black powder (average particle size (D50) 20 nm): 90 parts by mass Large particle size carbon black powder (average particle size (D50) 270 nm): 10 parts by mass Polyester polyurethane: 100 parts by mass (Tosoh Corporation Co., Ltd., product name: N-2304)
Methyl ethyl ketone: 500 parts by mass Toluene: 400 parts by mass Cyclohexanone: 100 parts by mass
(塗布工程)
上述のようにして調製した磁性層形成用塗料および下地層形成用塗料を用いて、非磁性支持体である、平均厚み4.2μm、長尺のポレエチレンナフタレートフィルム(以下「PENフィルム」という。)の一方の主面上に下地層および磁性層を以下のように形成した。まず、PENフィルムの一方の主面上に下地層形成用塗料を塗布、乾燥させることにより、カレンダー後に平均厚みが0.9μmとなるように下地層を形成した。次に、下地層上に磁性層形成用塗料を塗布、乾燥させることにより、カレンダー後に平均厚みが80nmとなるように磁性層を形成した。なお、磁性層形成用塗料の乾燥の際に、ソレノイドコイルにより、磁性粉をフィルムの厚み方向に磁場配向させた。また、磁性層形成用塗料の乾燥条件(乾燥温度および乾燥時間)を調整し、磁気テープの厚み方向(垂直方向)における角形比S1を65%に設定した。続いて、PENフィルムの他方の主面上にバック層形成用塗料を塗布、乾燥させることにより、カレンダー後に平均厚みが0.4μmになるようにバック層を形成した。これにより、磁気テープが得られた。
(Coating process)
Using the magnetic layer-forming coating material and the underlayer-forming coating material prepared as described above, a non-magnetic support having an average thickness of 4.2 μm and a long polyethylene naphthalate film (hereinafter referred to as “PEN film”) An underlayer and a magnetic layer were formed on one of the main surfaces as follows. First, a base layer-forming coating material was applied onto one main surface of a PEN film and dried to form a base layer having an average thickness of 0.9 μm after calendaring. Next, a magnetic layer-forming coating material was applied onto the underlayer and dried to form a magnetic layer having an average thickness of 80 nm after calendering. When the coating material for forming the magnetic layer was dried, the magnetic powder was magnetically oriented in the thickness direction of the film with a solenoid coil. Further, the drying conditions (drying temperature and drying time) of the magnetic layer-forming coating material were adjusted, and the squareness ratio S1 in the thickness direction (vertical direction) of the magnetic tape was set to 65%. Subsequently, the back layer-forming coating material was applied onto the other main surface of the PEN film and dried to form a back layer having an average thickness of 0.4 μm after calendering. Thereby, a magnetic tape was obtained.
(カレンダー工程、転写工程)
まず、カレンダー処理を行い、磁性層の表面を平滑化した。この際、カレンダー処理の条件を調整して、磁性層の表面の算術平均粗さRaを2.5nmに設定した。次に、得られた磁気テープをロール状に巻き取ったのち、この状態で磁気テープに60℃、10時間の第1の加熱処理を行った。そして、内周側に位置している端部が反対に外周側に位置するように、磁気テープをロール状に巻き直したのち、この状態で磁気テープに60℃、10時間の第2の加熱処理を行った。これにより、バック層の表面の多数の突部が磁性層の表面に転写され、磁性層の表面に多数の孔部が形成された。磁気テープの全体のBET比表面積は、4.5m2/gであった。また、磁気テープMTの全体の平均細孔直径は、8.0nmであった。
(Calendar process, transfer process)
First, calendering was performed to smooth the surface of the magnetic layer. At this time, the calendering conditions were adjusted to set the arithmetic average roughness Ra of the surface of the magnetic layer to 2.5 nm. Next, the obtained magnetic tape was wound into a roll, and in this state, the magnetic tape was subjected to the first heat treatment at 60° C. for 10 hours. Then, the magnetic tape is rewound in a roll shape so that the end portion located on the inner peripheral side is located opposite to the outer peripheral side, and in this state, the magnetic tape is subjected to the second heating at 60° C. for 10 hours. Processed. As a result, many protrusions on the surface of the back layer were transferred to the surface of the magnetic layer, and many holes were formed on the surface of the magnetic layer. The BET specific surface area of the entire magnetic tape was 4.5 m 2 /g. The average pore diameter of the entire magnetic tape MT was 8.0 nm.
(裁断工程)
上述のようにして得られた磁気テープを1/2インチ(12.65mm)幅に裁断した。これにより、平均厚み5.6μmの長尺状の磁気テープが得られた。
(Cutting process)
The magnetic tape obtained as described above was cut into ½ inch (12.65 mm) widths. As a result, a long magnetic tape having an average thickness of 5.6 μm was obtained.
(サーボパターンの書き込み工程)
上述のようにして得られた磁気テープに、サーボライタを用いてサーボパターンを書き込むことにより、5本のサーボバンドを形成した。サーボパターンは、LTO−8規格に準拠するものとされた。サーボライタとしては、第1の実施形態にて説明した構成を有するものが用いられた(図11、図12A、図12B参照)。
(Servo pattern writing process)
Five servo bands were formed by writing a servo pattern on the magnetic tape obtained as described above using a servo writer. The servo pattern was made to comply with the LTO-8 standard. As the servo writer, the one having the configuration described in the first embodiment was used (see FIGS. 11, 12A, and 12B).
サーボ信号書込ヘッドとガイドローラの距離を調整し、且つ、サーボ信号書込ヘッドへのテープ侵入角度を調整することにより、サーボパターンを記録する際のサーボ信号書込ヘッドと磁気テープとの間の摩擦係数を調整した。これにより、磁気テープのσswが23nmへと調整された。以上により、サーボパターンが書き込まれた磁気テープが得られた。 By adjusting the distance between the servo signal writing head and the guide roller, and adjusting the tape penetration angle into the servo signal writing head, between the servo signal writing head and the magnetic tape when recording the servo pattern. The friction coefficient of was adjusted. As a result, the σ sw of the magnetic tape was adjusted to 23 nm. As described above, the magnetic tape on which the servo pattern was written was obtained.
[実施例2]
塗布工程において、PENフィルムの平均厚みを4.0μm、下地層の平均厚みを0.6μmとしたこと以外は実施例1と同様にして、サーボパターンが書き込まれた、平均厚み5.1μmの磁気テープを得た。
[Example 2]
In the coating step, a magnetic pattern having an average thickness of 5.1 μm in which a servo pattern was written was formed in the same manner as in Example 1 except that the PEN film had an average thickness of 4.0 μm and the underlayer had an average thickness of 0.6 μm. Got the tape.
[実施例3]
カレンダー工程において、カレンダー処理の条件を調整して、磁性層の表面の算術平均粗さRaを2.2nmに設定したこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 3]
In the calendering step, a magnetic tape on which a servo pattern was written was prepared in the same manner as in Example 1 except that the calendering conditions were adjusted to set the arithmetic average roughness Ra of the surface of the magnetic layer to 2.2 nm. Obtained.
[実施例4]
磁性層形成用塗料の乾燥条件(乾燥温度および乾燥時間)を調整し、磁気テープの厚み方向(垂直方向)における角形比を70%に設定したこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 4]
A servo pattern was obtained in the same manner as in Example 1 except that the drying conditions (drying temperature and drying time) of the magnetic layer-forming coating material were adjusted and the squareness ratio in the thickness direction (vertical direction) of the magnetic tape was set to 70%. A magnetic tape on which is written is obtained.
[実施例5]
塗布工程において、PENフィルムの平均厚みを4.2μm、カレンダー後の下地層の平均厚みを0.9μm、カレンダー後の磁性層の平均厚みを70nmとしたこと以外は実施例1と同様にして、サーボパターンが書き込まれた、平均厚み5.6μmの磁気テープを得た。
[Example 5]
In the coating step, in the same manner as in Example 1 except that the average thickness of the PEN film was 4.2 μm, the average thickness of the underlayer after calendering was 0.9 μm, and the average thickness of the magnetic layer after calendering was 70 nm. A magnetic tape having an average thickness of 5.6 μm, on which a servo pattern was written, was obtained.
[実施例6]
塗布工程において、PENフィルムの平均厚みを4.2μm、カレンダー後の下地層の平均厚みを0.9μm、カレンダー後の磁性層の平均厚みを50nmとしたこと以外は実施例1と同様にして、サーボパターンが書き込まれた、平均厚み5.6μmの磁気テープを得た。
[Example 6]
In the coating step, the same procedure as in Example 1 was repeated except that the average thickness of the PEN film was 4.2 μm, the average thickness of the underlayer after calendaring was 0.9 μm, and the average thickness of the magnetic layer after calendaring was 50 nm. A magnetic tape having an average thickness of 5.6 μm, on which a servo pattern was written, was obtained.
[実施例7]
転写工程において、第1、第2の加熱処理の温度を55℃とし、第1、第2の加熱処理の時間を10時間とすることにより、BET比表面積を3.5m2/gとしたこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 7]
In the transfer step, the BET specific surface area was set to 3.5 m 2 /g by setting the temperature of the first and second heat treatments to 55° C. and the time of the first and second heat treatments to 10 hours. A magnetic tape on which a servo pattern was written was obtained in the same manner as in Example 1 except for the above.
[実施例8]
転写工程において、第1、第2の加熱処理の温度を70℃とし、第1、第2の加熱処理の時間を10時間とすることにより、BET比表面積を7.0m2/g、平均細孔直径を6.0nmとしたこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 8]
In the transfer step, the BET specific surface area is 7.0 m 2 /g and the average fineness is set by setting the temperature of the first and second heat treatments to 70° C. and setting the time of the first and second heat treatments to 10 hours. A magnetic tape on which a servo pattern was written was obtained in the same manner as in Example 1 except that the hole diameter was 6.0 nm.
[実施例9]
サーボパターンの書き込み工程において、サーボ信号書込ヘッドと磁気テープとの間の摩擦係数を実施例1に比べて減らすことにより、サーボパターンの非直線性を示す統計値σSWを20nmに設定したこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 9]
In the step of writing the servo pattern, the coefficient of friction between the servo signal writing head and the magnetic tape is reduced as compared with the first embodiment, and thus the statistical value σ SW indicating the nonlinearity of the servo pattern is set to 20 nm. A magnetic tape on which a servo pattern was written was obtained in the same manner as in Example 1 except for the above.
[実施例10]
サーボパターンの書き込み工程において、サーボ信号書込ヘッドと磁気テープとの間の摩擦係数を実施例9に比べて減らすことにより、サーボパターンの非直線性を示す統計値σSWを15nmに設定したこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 10]
In the step of writing the servo pattern, the coefficient of friction between the servo signal writing head and the magnetic tape was reduced as compared with that in Example 9 to set the statistical value σ SW indicating the nonlinearity of the servo pattern to 15 nm. A magnetic tape on which a servo pattern was written was obtained in the same manner as in Example 1 except for the above.
[実施例11]
磁性層形成用塗料の調製工程において、磁性粉としてストロンチウムフェライト粒子の粉末(六角板状、アスペクト比2.9、粒子体積1600nm3)を用いたこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 11]
A servo pattern was obtained in the same manner as in Example 1 except that powder of strontium ferrite particles (hexagonal plate shape, aspect ratio 2.9, particle volume 1600 nm 3 ) was used as the magnetic powder in the step of preparing the coating material for forming the magnetic layer. A magnetic tape on which is written is obtained.
[実施例12]
磁性層形成用塗料の調製工程において、磁性粉としてε酸化鉄粒子の粉末(球状、アスペクト比1.1、粒子体積1800nm3)を用いたこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 12]
A servo pattern was obtained in the same manner as in Example 1 except that ε iron oxide particle powder (spherical shape, aspect ratio 1.1, particle volume 1800 nm 3 ) was used as the magnetic powder in the process of preparing the coating for forming the magnetic layer. A written magnetic tape was obtained.
[実施例13]
磁性層形成用塗料の調製工程において、磁性粉としてコバルトフェライトの粉末(立方体状、アスペクト比1.7、粒子体積2000nm3)を用いたこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 13]
A servo pattern was written in the same manner as in Example 1 except that cobalt ferrite powder (cubic shape, aspect ratio 1.7, particle volume 2000 nm 3 ) was used as the magnetic powder in the process of preparing the magnetic layer-forming coating material. Obtained magnetic tape.
[実施例14]
磁性層形成用塗料の乾燥条件(乾燥温度および乾燥時間)を調整し、磁気テープの厚み方向(垂直方向)における角形比を70%に設定したこと、および転写工程において、第1、第2の加熱処理の温度を55℃とし、第1、第2の加熱処理の時間を10時間とすることにより、BET比表面積を3.5m2/g、平均細孔直径を8.0nmとしたこと以外は実施例3と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 14]
The drying conditions (drying temperature and drying time) of the magnetic layer-forming coating material were adjusted to set the squareness ratio in the thickness direction (vertical direction) of the magnetic tape to 70%, and in the transfer step, the first and second Except that the BET specific surface area was 3.5 m 2 /g and the average pore diameter was 8.0 nm by setting the temperature of the heat treatment to 55° C. and the time of the first and second heat treatments to 10 hours. In the same manner as in Example 3, a magnetic tape having a servo pattern written therein was obtained.
[実施例15]
転写工程において、第1、第2の加熱処理の温度を70℃とし、第1、第2の加熱処理の時間を10時間とすることにより、BET比表面積を7.0m2/g、平均細孔直径を6.0nmとしたこと以外は実施例14と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Example 15]
In the transfer step, the BET specific surface area is 7.0 m 2 /g and the average fineness is set by setting the temperature of the first and second heat treatments to 70° C. and setting the time of the first and second heat treatments to 10 hours. A magnetic tape on which a servo pattern was written was obtained in the same manner as in Example 14 except that the hole diameter was 6.0 nm.
[比較例1]
サーボパターンの書き込み工程において、磁気テープの張力を実施例1に比べて高くし、サーボ信号書込ヘッドと磁気テープとの間の摩擦係数を上げることにより、サーボパターンの非直線性を示す統計値σSWを25nmに設定したこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Comparative Example 1]
In the servo pattern writing process, the tension of the magnetic tape is made higher than that in the first embodiment, and the coefficient of friction between the servo signal writing head and the magnetic tape is increased to show a statistical value indicating the non-linearity of the servo pattern. A magnetic tape on which a servo pattern was written was obtained in the same manner as in Example 1 except that σ SW was set to 25 nm.
[比較例2]
カレンダー工程において、カレンダー処理の条件を調整して、磁性層の表面の算術平均粗さRaを3.0nmに設定したこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Comparative example 2]
In the calendering step, a magnetic tape on which a servo pattern was written was prepared in the same manner as in Example 1 except that the calendering conditions were adjusted to set the arithmetic average roughness Ra of the surface of the magnetic layer to 3.0 nm. Obtained.
[比較例3]
磁性層形成用塗料の乾燥条件(乾燥温度および乾燥時間)を調整し、磁気テープの厚み方向(垂直方向)における角形比を60%に設定したこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Comparative Example 3]
A servo pattern was obtained in the same manner as in Example 1 except that the drying conditions (drying temperature and drying time) of the magnetic layer-forming coating material were adjusted and the squareness ratio in the thickness direction (vertical direction) of the magnetic tape was set to 60%. A magnetic tape on which is written is obtained.
[比較例4]
塗布工程において、PENフィルムの平均厚みを4.2μm、カレンダー後の下地層の平均厚みを0.9μm、カレンダー後の磁性層の平均厚みを90nmとしたこと以外は実施例1と同様にして、サーボパターンが書き込まれた、平均厚み5.6μmの磁気テープを得た。
[Comparative Example 4]
In the coating step, in the same manner as in Example 1 except that the average thickness of the PEN film was 4.2 μm, the average thickness of the underlayer after calendaring was 0.9 μm, and the average thickness of the magnetic layer after calendaring was 90 nm. A magnetic tape having an average thickness of 5.6 μm, on which a servo pattern was written, was obtained.
[比較例5]
転写工程において、第1、第2の加熱処理の温度を55℃とし、第1、第2の加熱処理の時間を10時間とすることにより、BET比表面積を3.2m2/g、平均細孔直径を9.0nmとしたこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Comparative Example 5]
In the transfer step, the temperature of the first and second heat treatments was set to 55° C., and the time of the first and second heat treatments was set to 10 hours, so that the BET specific surface area was 3.2 m 2 /g and the average fineness. A magnetic tape on which a servo pattern was written was obtained in the same manner as in Example 1 except that the hole diameter was 9.0 nm.
[比較例6]
転写工程において、第1、第2の加熱処理の温度を70℃とし、第1、第2の加熱処理の時間を20時間としたことにより、BET比表面積を8.0m2/g、平均細孔直径を6.0nmとしたこと以外は実施例1と同様にして、サーボパターンが書き込まれた磁気テープを得た。
[Comparative Example 6]
In the transfer step, first, the temperature of the second heat treatment and 70 ° C., first, by which the time of the second heat treatment is 20 hours, the BET specific surface area of 8.0 m 2 / g, an average pore A magnetic tape on which a servo pattern was written was obtained in the same manner as in Example 1 except that the hole diameter was 6.0 nm.
[評価]
(SNR)
実施例1〜15、比較例1〜6の磁気テープ(サーボパターンが書き込み後の磁気テープ)のSNRを以下のようにして評価した。記録/再生ヘッドおよび記録/再生アンプを取り付けた1/2インチテープ走行装置(Mountain Engineering II社製、MTS Transport)を用いて、25℃環境における磁気テープのSNR(電磁変換特性)を測定した。記録ヘッドにはギャップ長0.2μmのリングヘッドを用い、再生ヘッドにはシールド間距離0.1μmのGMRヘッドを用いた。相対速度は6m/s、記録クロック周波数は160MHz、記録トラック幅は2.0μmとした。また、SNRは、下記の文献に記載の方法に基づき算出した。その結果を、実施例1のSNRを0dBとする相対値で表2に示した。
Y.Okazaki:“An Error Rate Emulation System.”,IEEE Trans. Man., 31,pp.3093-3095(1995)
[Evaluation]
(SNR)
The SNRs of the magnetic tapes of Examples 1 to 15 and Comparative Examples 1 to 6 (magnetic tape after writing the servo pattern) were evaluated as follows. The SNR (electromagnetic conversion characteristics) of the magnetic tape in a 25° C. environment was measured using a 1/2 inch tape running device (MTS Transport, manufactured by Mountain Engineering II) equipped with a recording/reproducing head and a recording/reproducing amplifier. A ring head having a gap length of 0.2 μm was used as the recording head, and a GMR head having a shield distance of 0.1 μm was used as the reproducing head. The relative speed was 6 m/s, the recording clock frequency was 160 MHz, and the recording track width was 2.0 μm. The SNR was calculated based on the method described in the following document. The results are shown in Table 2 as relative values with the SNR of Example 1 being 0 dB.
Y.Okazaki: “An Error Rate Emulation System.”, IEEE Trans. Man., 31, pp.3093-3095 (1995)
(摩擦係数比)
実施例1〜15、比較例1〜6の磁気テープの摩擦係数比(μB/μA)および摩擦係数比(μC(1000)/μC(5))を、上述の第1の実施形態にて説明した評価方法により評価した。
(Friction coefficient ratio)
The friction coefficient ratios (μ B /μ A ) and the friction coefficient ratios (μ C (1000)/μ C (5)) of the magnetic tapes of Examples 1 to 15 and Comparative Examples 1 to 6 were determined by the above-mentioned first embodiment. It evaluated by the evaluation method demonstrated in the form.
(走行安定性(1))
実施例1〜15、比較例1〜6の磁気テープ(サーボパターンが書き込み後の磁気テープ)の走行安定性を以下のようにして評価した。磁気テープをLTOカートリッジに組み込んだ。当該LTOカートリッジに対して、SCSIおよびファイバーチャネルを介してサーバおよびPCと接続されたLTOドライブを用いて磁気テープ全面にデータを記録し、再生する、いわゆるフルボリュームテストを実施した。当該フルボリュームテストでは、データの記録状態が逐次監視されており、問題が発生した場合は当該問題に関する情報が記録された。
(Running stability (1))
The running stability of the magnetic tapes of Examples 1 to 15 and Comparative Examples 1 to 6 (magnetic tape after writing the servo pattern) was evaluated as follows. The magnetic tape was incorporated into the LTO cartridge. A so-called full volume test was performed on the LTO cartridge, in which data was recorded and reproduced on the entire surface of the magnetic tape by using an LTO drive connected to a server and a PC via SCSI and fiber channel. In the full volume test, the recording state of data was sequentially monitored, and when a problem occurred, information on the problem was recorded.
当該フルボリュームテストにおいて、磁気テープの走行状態が不安定であると、ドライブは自動的に記録を一時停止する、いわゆるストップライトを行う。当該ストップライトが行われると、データの転送レートが落ちる。また、当該フルボリュームテストにおいて、磁気テープの走行状態がさらに不安定になると、ドライブは自動的に記録を完全に停止し、いわゆるフェイル状態になる。 In the full volume test, if the running state of the magnetic tape is unstable, the drive automatically performs a so-called stop light to temporarily stop recording. When the stop write is performed, the data transfer rate drops. Further, in the full volume test, when the running state of the magnetic tape becomes further unstable, the drive automatically stops recording completely and becomes a so-called fail state.
実施例1〜15および比較例1〜6の磁気テープそれぞれについて、当該フルボリュームテストを連続で5回繰り返し実施し、「フルボリュームテスト5回目の転送レートの相対値」および「フェイルの有無」が記録された。フルボリュームテストにおける転送レートの相対値は、評価に使用したドライブの最高性能が発揮された場合の転送レートに対する、フルボリュームテスト1回あたりの平均転送レートの割合である。当該ドライブの最高性能が発揮された場合を100%とする。例えば、LTO8ドライブを使用してファイバーチャネルを介してサーバに接続し、LTO8フォーマットで記録を行った場合において、当該LTO8ドライブが最高性能を発揮した時の転送レートは350MB/secである。「フェイルの有無」は、上記のとおりのフェイル状態になったか否かである。 For each of the magnetic tapes of Examples 1 to 15 and Comparative Examples 1 to 6, the full volume test was repeated 5 times in succession, and the "relative value of the transfer rate at the 5th full volume test" and "presence/absence of fail" were Was recorded. The relative value of the transfer rate in the full volume test is the ratio of the average transfer rate per full volume test to the transfer rate when the drive used for evaluation exhibited the maximum performance. The case where the maximum performance of the drive is demonstrated is 100%. For example, when the LTO8 drive is connected to the server via a fiber channel and recording is performed in the LTO8 format, the transfer rate when the LTO8 drive exhibits the maximum performance is 350 MB/sec. The “presence/absence of fail” is whether or not the above-mentioned fail state has occurred.
以下の表2に示される4段階の評価基準に従い、各磁気テープを評価した。表2に示されるとおり、レベル4が最良の走行安定性を有することを意味し、レベル1が最悪の走行安定性を有することを意味する。例えば、磁気テープの転送レートの相対値が5回目のフルボリュームテスト全てにおいて95%以上100%以下であり且つフェイルが無い場合に、当該磁気テープはレベル4であると評価される。レベル4または3の評価(すなわち、フルボリュームテスト5回目における磁気テープの転送レートが80%以上であること)が、磁気テープの良好な走行安定性の観点から望ましい。
各磁気テープの走行安定性の評価結果は、表3の「走行安定性(1)」の列に示されている。
Each magnetic tape was evaluated according to the four-step evaluation criteria shown in Table 2 below. As shown in Table 2, level 4 means that it has the best driving stability and level 1 means that it has the worst driving stability. For example, when the relative value of the transfer rate of the magnetic tape is 95% or more and 100% or less in all of the fifth full volume tests and there is no failure, the magnetic tape is evaluated as level 4. Evaluation of Level 4 or 3 (that is, the transfer rate of the magnetic tape at the fifth time of the full volume test is 80% or more) is desirable from the viewpoint of good running stability of the magnetic tape.
The evaluation results of the running stability of each magnetic tape are shown in the column of "Running stability (1)" in Table 3.
表2に、上記の4段階の走行安定性の判定基準の詳細を示す。
(走行安定性(2))
実施例1〜15、比較例1〜6の磁気テープ(サーボパターンが書き込み後の磁気テープ)の走行安定性を以下のようにして評価した。まず、カートリッジとして、テンション調整情報を書き込む記憶領域をメモリに有し、上記領域に対するテンション調整情報の書き込み、および上記領域からのテンション調整情報の読み出しをコントローラにより行うことが可能なカートリッジメモリを備えるものを準備した。このカートリッジのサイズは、上記の走行安定性(1)の評価で用いたカートリッジと同様のサイズ(102mm×105mm×22mm)とした。
(Running stability (2))
The running stability of the magnetic tapes of Examples 1 to 15 and Comparative Examples 1 to 6 (magnetic tape after writing the servo pattern) was evaluated as follows. First, as a cartridge, a cartridge memory is provided which has a memory area for writing tension adjustment information in a memory, and which is capable of writing tension adjustment information to the area and reading tension adjustment information from the area by a controller. Prepared. The size of this cartridge was the same size (102 mm×105 mm×22 mm) as the cartridge used in the evaluation of running stability (1).
次に、磁気テープ全面にデータを記録および再生するときに磁気テープの長手方向のテンションを調整すること以外は、上記の“走行安定性(1)”と同様にしてフルボリュームテストを行った。次に、上記の“走行安定性(1)”と同様にして走行安定性をレベル1〜4の4段階で評価した。
各磁気テープの走行安定性の評価結果は、表3の「走行安定性(2)」の列に示されている。
Next, a full volume test was performed in the same manner as in "Running stability (1)" above, except that the tension in the longitudinal direction of the magnetic tape was adjusted when recording and reproducing data on the entire surface of the magnetic tape. Next, the running stability was evaluated in four levels of Levels 1 to 4 in the same manner as in the above "Running stability (1)".
The evaluation results of the running stability of each magnetic tape are shown in the column of "Running stability (2)" in Table 3.
磁気テープの長手方向のテンション調整は以下のようにして行った。すなわち、記録再生装置により磁気テープを往復走行ながら、2列以上のサーボバンド(サーボトラック)を同時に再生し、それらのサーボバンドのハの字のサーボパターン列(サーボ信号)それぞれの再生波形の形状から、走行時のサーボパターン列の間隔を連続的(サーボの位置情報があるポイント毎(具体的には約6mm毎))に計測した。そして、この計測されたサーボパターン列の間隔情報に基づき、スピンドル駆動装置とリール駆動装置の回転駆動を制御し、サーボパターン列の間隔が規定の幅に近づくように、磁気テープの長手方向のテンションを自動で調整するようにした。ここで、“規定の幅”とは、記録再生装置が有する2つのサーボリードヘッド間の距離を意味する。なお、磁気テープの走行時には、2つのサーボリードヘッドはそれぞれ、データバンドの上下に位置する2つのサーボバンドに位置される。 The tension adjustment in the longitudinal direction of the magnetic tape was performed as follows. That is, while reciprocating the magnetic tape by the recording/reproducing apparatus, two or more rows of servo bands (servo tracks) are reproduced at the same time, and the reproduced waveform shape of each C-shaped servo pattern row (servo signal) of those servo bands is reproduced. From this, the intervals of the servo pattern trains during running were continuously measured (at each point having servo position information (specifically, about every 6 mm)). Then, the rotational drive of the spindle drive device and the reel drive device is controlled based on the measured distance information of the servo pattern train, and the tension in the longitudinal direction of the magnetic tape is adjusted so that the space between the servo pattern trains approaches the specified width. Was adjusted automatically. Here, the “specified width” means a distance between two servo read heads included in the recording/reproducing apparatus. When the magnetic tape is running, the two servo read heads are respectively located in the two servo bands located above and below the data band.
(ヤング率)
実施例1〜15、比較例1〜6の磁気テープのヤング率を、上述の第1の実施形態にて説明したヤング率の測定方法により測定した。
(Young's modulus)
The Young's modulus of the magnetic tapes of Examples 1 to 15 and Comparative Examples 1 to 6 were measured by the Young's modulus measuring method described in the first embodiment.
表3は、実施例1〜15、比較例1〜6の磁気テープの構成および評価結果を示す。
TC:Tension control
Table 3 shows the configurations and evaluation results of the magnetic tapes of Examples 1 to 15 and Comparative Examples 1 to 6.
上記評価の結果から以下のことがわかる。
磁気テープが洗浄、乾燥された状態において測定された、磁気テープの全体のBET比表面積が3.5m2/g以上7.0m2/g以下の範囲を外れると、走行安定性が低下する(実施例1、7、8、比較例5、6)。
サーボパターン列(サーボバンド)の非直線性を示す統計値σSWが24nmを超えると、走行安定性が低下する(実施例1、9、10、比較例1)。
磁性層の表面の算術平均粗さRaが2.5nmを超えると、電磁変換特性(SNR)が悪化する(実施例1、3、比較例2)。
磁性層の垂直方向における角形比が65%未満であると、電磁変換特性(SNR)が悪化する(実施例1、4、比較例3)。
磁性層の平均厚みが80nmを超えると、電磁変換特性(SNR)が悪化する(実施例1、5、6、比較例4)。
The results of the above evaluation reveal the following.
When the total BET specific surface area of the magnetic tape measured in a state where the magnetic tape is washed and dried is out of the range of 3.5 m 2 /g or more and 7.0 m 2 /g or less, running stability decreases ( Examples 1, 7, 8 and Comparative Examples 5, 6).
When the statistical value σ SW indicating the non-linearity of the servo pattern string (servo band) exceeds 24 nm, the running stability decreases (Examples 1, 9, 10 and Comparative Example 1).
When the arithmetic average roughness Ra of the surface of the magnetic layer exceeds 2.5 nm, the electromagnetic conversion characteristics (SNR) deteriorate (Examples 1, 3 and Comparative Example 2).
If the squareness ratio of the magnetic layer in the vertical direction is less than 65%, the electromagnetic conversion characteristics (SNR) deteriorate (Examples 1, 4 and Comparative Example 3).
When the average thickness of the magnetic layer exceeds 80 nm, the electromagnetic conversion characteristics (SNR) deteriorate (Examples 1, 5, 6 and Comparative Example 4).
したがって、平均厚みが5.6μm以下である磁気テープにおいて、優れた走行安定性と電磁変換特性を両立するためには、磁気テープの全体のBET比表面積が3.5m2/g以上7.0m2/g以下であり、サーボパターンの非直線性を示す統計値σSWが24nm以下であり、磁性層の表面の算術平均粗さRaが2.5nm以下であり、磁性層の垂直方向における角形比が65%以上であり、磁性層の平均厚みが80nm以下である。 Therefore, in order to achieve both excellent running stability and electromagnetic conversion characteristics in a magnetic tape having an average thickness of 5.6 μm or less, the entire BET specific surface area of the magnetic tape is 3.5 m 2 /g or more and 7.0 m or less. 2 /g or less, the statistic value σ SW indicating the non-linearity of the servo pattern is 24 nm or less, the arithmetic average roughness Ra of the surface of the magnetic layer is 2.5 nm or less, and the rectangular shape of the magnetic layer in the vertical direction. The ratio is 65% or more, and the average thickness of the magnetic layer is 80 nm or less.
磁性粉としてバリウムフェライト粒子粉に代えてストロンチウムフェライト粒子粉を用いても、BET比表面積、統計値σSW、算術平均粗さRa、角形比および磁性層の平均厚みが上記の数値範囲を満たすことで、平均厚みが5.6μm以下である磁気テープにおいて、優れた走行安定性と電磁変換特性を両立することができる(実施例1、11)。 Even if strontium ferrite particle powder is used instead of barium ferrite particle powder as the magnetic powder, the BET specific surface area, statistical value σ SW, arithmetic mean roughness Ra, squareness ratio and average thickness of the magnetic layer satisfy the above numerical range. In a magnetic tape having an average thickness of 5.6 μm or less, excellent running stability and electromagnetic conversion characteristics can both be achieved (Examples 1 and 11).
磁性粉として六方晶フェライト粒子粉(バリウムフェライト粒子粉、ストロンチウムフェライト粒子粉)に代えて、ε酸化鉄粒子粉またはコバルトフェライト粒子粉を用いた場合にも、BET比表面積、統計値σSW、算術平均粗さRa、角形比および磁性層の平均厚みが上記の数値範囲を満たすことで、平均厚みが5.6μm以下である磁気テープにおいて、優れた走行安定性と電磁変換特性を両立することができる(実施例1、12、13)。 Even when ε iron oxide particle powder or cobalt ferrite particle powder is used instead of hexagonal ferrite particle powder (barium ferrite particle powder, strontium ferrite particle powder) as magnetic powder, BET specific surface area, statistical value σ SW, arithmetic When the average roughness Ra, the squareness ratio, and the average thickness of the magnetic layer satisfy the above numerical ranges, the magnetic tape having an average thickness of 5.6 μm or less can have both excellent running stability and electromagnetic conversion characteristics. Yes (Examples 1, 12, 13).
BET比表面積、統計値σSW、算術平均粗さRa、角形比および磁性層の平均厚みが上記の数値範囲を満たすことで、磁気テープのテンションを調整した場合にも、平均厚みが5.6μm以下であり磁気テープにおいて、優れた走行安定性と電磁変換特性を両立することができる(実施例1)。 When the BET specific surface area, the statistical value σ SW, the arithmetic average roughness Ra, the squareness ratio and the average thickness of the magnetic layer satisfy the above numerical ranges, the average thickness is 5.6 μm even when the tension of the magnetic tape is adjusted. It is the following, and it is possible to achieve both excellent running stability and electromagnetic conversion characteristics in the magnetic tape (Example 1).
平均厚みが5.6μm以下である磁気テープにおいて、より優れた走行安定性を得るためには、サーボパターン列(サーボバンド)の非直線性を示す統計値σSWが20nm以下であることが好ましい(実施例1、9、10)。
より優れた電磁変換特性を得るためには、磁性層の表面の算術平均粗さRaが2.2nm以下であることが好ましい(実施例1、3)。
より優れた電磁変換特性を得るためには、磁性層の垂直方向における角形比が70%以上であることが好ましい(実施例1、4)。
In order to obtain more excellent running stability in a magnetic tape having an average thickness of 5.6 μm or less, it is preferable that the statistical value σ SW indicating the nonlinearity of the servo pattern string (servo band) is 20 nm or less. (Examples 1, 9, 10).
In order to obtain more excellent electromagnetic conversion characteristics, it is preferable that the arithmetic average roughness Ra of the surface of the magnetic layer is 2.2 nm or less (Examples 1 and 3).
In order to obtain more excellent electromagnetic conversion characteristics, it is preferable that the squareness ratio of the magnetic layer in the vertical direction is 70% or more (Examples 1 and 4).
摩擦係数比(μB/μA)が1.0以上2.0以下の範囲であると、平均厚みが5.6μm以下である磁気テープをテンションコントロールしても、優れた走行安定性が得られる(実施例1、8、14、15、比較例5、6)。
摩擦係数比(μC(1000)/μC(5)が1.0以上2.0以下の範囲であると、平均厚みが5.6μm以下の磁気テープに対して5回のフルボリュームテストを行った後にも(すなわち平均厚みが5.6μm以下の磁気テープを1000回を超えてパスした後にも)、優れた走行安定性が得られる(実施例1、3、7、14、15、比較例5、6)。
When the friction coefficient ratio (μ B /μ A ) is in the range of 1.0 or more and 2.0 or less, excellent running stability can be obtained even when tension control is applied to a magnetic tape having an average thickness of 5.6 μm or less. (Examples 1, 8, 14, 15 and Comparative Examples 5, 6).
When the friction coefficient ratio (μ C (1000)/μ C (5) is in the range of 1.0 or more and 2.0 or less, a full volume test is performed 5 times on a magnetic tape having an average thickness of 5.6 μm or less. After running (that is, even after passing a magnetic tape having an average thickness of 5.6 μm or less more than 1000 times), excellent running stability is obtained (Examples 1, 3, 7, 14, 15 and comparison). Examples 5, 6).
以上、本開示の実施形態および変形例について具体的に説明したが、本開示は、上述の実施形態および変形例に限定されるものではなく、本開示の技術的思想に基づく各種の変形が可能である。例えば、上述の実施形態および変形例において挙げた構成、方法、工程、形状、材料および数値等はあくまでも例に過ぎず、必要に応じてこれと異なる構成、方法、工程、形状、材料および数値等を用いてもよい。上述の実施形態および変形例の構成、方法、工程、形状、材料および数値等は、本開示の主旨を逸脱しない限り、互いに組み合わせることが可能である。 Although the embodiment and the modified example of the present disclosure have been specifically described above, the present disclosure is not limited to the above-described embodiment and the modified example, and various modifications based on the technical idea of the present disclosure are possible. Is. For example, the configurations, methods, steps, shapes, materials, numerical values, and the like described in the above-described embodiments and modifications are merely examples, and configurations, methods, steps, shapes, materials, numerical values, etc. different from these may be used as necessary. May be used. The configurations, methods, steps, shapes, materials, numerical values, and the like of the above-described embodiments and modified examples can be combined with each other without departing from the gist of the present disclosure.
上述の実施形態および変形例にて例示した化合物等の化学式は代表的なものであって、同じ化合物の一般名称であれば、記載された価数等に限定されない。上述の実施形態および変形例で段階的に記載されている数値範囲において、ある段階の数値範囲の上限値または下限値は、他の段階の数値範囲の上限値または下限値に置き換えてもよい。上述の実施形態および変形例で例示した材料は、特に断らない限り、1種を単独でまたは2種以上を組み合わせて用いることができる。 The chemical formulas of the compounds and the like exemplified in the above-described embodiments and modified examples are representative ones, and the valences and the like described are not limited as long as they are common names of the same compounds. In the numerical ranges described stepwise in the above-described embodiments and modifications, the upper limit value or the lower limit value of the numerical range of a certain stage may be replaced with the upper limit value or the lower limit value of the numerical range of another stage. The materials exemplified in the above-described embodiments and modifications can be used alone or in combination of two or more unless otherwise specified.
また、本開示は以下の構成を採用することもできる。
(1)
テープ状の磁気記録媒体であって、
基体と、
前記基体上に設けられた下地層と、
前記下地層上に設けられた磁性層と
を備え、
前記基体は、ポリエステルを含み、
前記下地層および前記磁性層は、潤滑剤を含み、
前記磁性層は、多数の孔部が設けられた表面を有し、
前記表面の算術平均粗さRaは、2.5nm以下であり、
前記磁気記録媒体が洗浄、乾燥された状態において測定された、前記磁気記録媒体の全体のBET比表面積は、3.5m2/g以上7.0m2/g以下であり、
前記磁性層の垂直方向における角形比は、65%以上であり、
前記磁性層の平均厚みは、80nm以下であり、
前記磁気記録媒体の平均厚みは、5.6μm以下であり、
前記磁性層にはサーボパターンが記録され、前記サーボパターンの非直線性を示す統計値σSWは、24nm以下である磁気記録媒体。
(2)
前記統計値σSWは、23nm以下である(1)に記載の磁気記録媒体。
(3)
前記統計値σSWは、20nm以下である(1)に記載の磁気記録媒体。
(4)
前記角形比は、70%以上である(1)から(3)のいずれかに記載の磁気記録媒体。
(5)
前記算術平均粗さRaは、2.2nm以下である(1)から(4)のいずれかに記載の磁気記録媒体。
(6)
前記磁気記録媒体に加わる張力が1.2Nであるときの前記磁性層の表面と磁気ヘッドの間の動摩擦係数μAと、前記磁気記録媒体に加わる張力が0.4Nであるときの前記磁性層の表面と前記磁気ヘッドの間の動摩擦係数μBとの摩擦係数比(μB/μA)は、1.0以上2.0以下である(1)から(5)のいずれかに記載の磁気記録媒体。
(7)
前記磁気記録媒体に加わる張力が0.6Nであるときの前記磁性層の表面と磁気ヘッドの間の動摩擦係数μCに関して、走行5回目の動摩擦係数μC(5)と走行1000回目の動摩擦係数μC(1000)との摩擦係数比(μC(1000)/μC(5))は、1.0以上2.0以下である(1)から(6)のいずれかに記載の磁気記録媒体。
(8)
前記磁気記録媒体が洗浄、乾燥された状態において測定された、前記磁気記録媒体の全体の平均細孔直径は、6nm以上11nm以下である(1)から(7)のいずれかに記載の磁気記録媒体。
(9)
長手方向における前記磁性層の保磁力Hcは、2000Oe以下である(1)から(8)のいずれかに記載の磁気記録媒体。
(10)
前記磁性層は、5以上のサーボバンドを有する(1)から(9)のいずれかに記載の磁気記録媒体。
(11)
前記表面の面積に対する前記サーボバンドの総面積の割合は、4.0%以下である(10)に記載の磁気記録媒体。
(12)
前記サーボバンドの幅は、95μm以下である(10)または(11)に記載の磁気記録媒体。
(13)
前記磁性層は、複数のデータトラックを形成可能に構成され、
前記データトラックの幅は、2.0μm以下である(1)から(12)のいずれかに記載の磁気記録媒体。
(14)
前記磁性層は、磁化反転間距離Lの最小値が48nm以下となるようにデータを記録可能に構成されている(1)から(13)のいずれかに記載の磁気記録媒体。
(15)
前記基体の平均厚みは、4.2μm以下である(1)から(14)のいずれかに記載の磁気記録媒体。
(16)
前記潤滑剤が、脂肪酸および脂肪酸エステルから選ばれる少なくとも1種を含み、
前記脂肪酸が下記一般式(1)または(2)で示される化合物を含み、且つ、前記脂肪酸エステルが下記一般式(3)または(4)で示される化合物を含む(1)から(15)のいずれかに記載の磁気記録媒体。
CH3(CH2)kCOOH ・・・(1)
(但し、前記一般式(1)において、kは14以上22以下の範囲から選ばれる整数である。)
CH3(CH2)nCH=CH(CH2)mCOOH ・・・(2)
(但し、前記一般式(2)において、nとmとの和は12以上20以下の範囲から選ばれる整数である。)
CH3(CH2)pCOO(CH2)qCH3 ・・・(3)
(但し、前記一般式(3)において、pは14以上22以下の範囲から選ばれる整数であり、qは2以上5以下の範囲から選ばれる整数である。)
CH3(CH2)rCOO−(CH2)sCH(CH3)2 ・・・(4)
(但し、前記一般式(4)において、rは14以上22以下の範囲から選ばれる整数であり、sは1以上3以下の範囲から選ばれる整数である。)
(17)
前記磁性層は、磁性粉を含み、
前記磁性粉は、六方晶フェライト、ε酸化鉄またはCo含有スピネルフェライトを含む(1)から(16)のいずれかに記載の磁気記録媒体。
(18)
前記六方晶フェライトは、BaおよびSrのうちの少なくとも1種を含み、
前記ε酸化鉄は、AlおよびGaのうちの少なくとも1種を含む(17)に記載の磁気記録媒体。
(19)
(1)から(18)のいずれかに記載された前記磁気記録媒体と、
前記磁気記録媒体の長手方向にかかるテンションを調整するための調整情報を書き込む領域を有する記憶部と
を備えるカートリッジ。
(20)
記録再生装置と通信を行う通信部と、
前記通信部を介して前記記録再生装置から受信した前記調整情報を前記領域に記憶し、かつ、前記記録再生装置の要求に応じて、前記領域から前記調整情報を読み出し、前記通信部を介して前記記録再生装置に送信する制御部と
をさらに備える(19)に記載のカートリッジ。
Further, the present disclosure may also adopt the following configurations.
(1)
A tape-shaped magnetic recording medium,
A substrate,
A base layer provided on the base,
A magnetic layer provided on the underlayer,
The substrate comprises polyester,
The underlayer and the magnetic layer include a lubricant,
The magnetic layer has a surface provided with a large number of holes,
The arithmetic average roughness Ra of the surface is 2.5 nm or less,
The BET specific surface area of the entire magnetic recording medium measured in a state where the magnetic recording medium is washed and dried is 3.5 m 2 /g or more and 7.0 m 2 /g or less,
The squareness ratio of the magnetic layer in the vertical direction is 65% or more,
The average thickness of the magnetic layer is 80 nm or less,
The average thickness of the magnetic recording medium is 5.6 μm or less,
A magnetic recording medium in which a servo pattern is recorded on the magnetic layer, and a statistical value σ SW indicating the nonlinearity of the servo pattern is 24 nm or less.
(2)
The magnetic recording medium according to (1), wherein the statistical value σ SW is 23 nm or less.
(3)
The magnetic recording medium according to (1), wherein the statistical value σ SW is 20 nm or less.
(4)
The magnetic recording medium according to any one of (1) to (3), wherein the squareness ratio is 70% or more.
(5)
The magnetic recording medium according to any one of (1) to (4), wherein the arithmetic average roughness Ra is 2.2 nm or less.
(6)
Coefficient of dynamic friction μ A between the surface of the magnetic layer and the magnetic head when the tension applied to the magnetic recording medium is 1.2 N, and the magnetic layer when the tension applied to the magnetic recording medium is 0.4 N The friction coefficient ratio (μ B /μ A ) between the surface of the magnetic head and the dynamic friction coefficient μ B between the magnetic head and the magnetic head is 1.0 or more and 2.0 or less. (1) to (5) Magnetic recording medium.
(7)
Regarding the dynamic friction coefficient μ C between the surface of the magnetic layer and the magnetic head when the tension applied to the magnetic recording medium is 0.6 N, the dynamic friction coefficient μ C (5) at the fifth running time and the dynamic friction coefficient at the 1,000th running time mu C (1000) and the friction coefficient ratio (μ C (1000) / μ C (5)) , the magnetic recording according to any one of 1.0 to 2.0 (1) (6) Medium.
(8)
The magnetic recording medium according to any one of (1) to (7), wherein the entire average pore diameter of the magnetic recording medium measured in a state where the magnetic recording medium is washed and dried is 6 nm or more and 11 nm or less. Medium.
(9)
The magnetic recording medium according to any one of (1) to (8), wherein the coercive force Hc of the magnetic layer in the longitudinal direction is 2000 Oe or less.
(10)
The magnetic recording medium according to any one of (1) to (9), wherein the magnetic layer has five or more servo bands.
(11)
The magnetic recording medium according to (10), wherein the ratio of the total area of the servo band to the area of the surface is 4.0% or less.
(12)
The width of the servo band is the magnetic recording medium according to (10) or (11), which is 95 μm or less.
(13)
The magnetic layer is configured to form a plurality of data tracks,
The magnetic recording medium according to any one of (1) to (12), wherein the width of the data track is 2.0 μm or less.
(14)
The magnetic recording medium according to any one of (1) to (13), wherein the magnetic layer is capable of recording data such that the minimum value of the inter-reversal distance L is 48 nm or less.
(15)
The magnetic recording medium according to any one of (1) to (14), wherein the average thickness of the substrate is 4.2 μm or less.
(16)
The lubricant contains at least one selected from fatty acids and fatty acid esters,
(1) to (15), wherein the fatty acid contains a compound represented by the following general formula (1) or (2), and the fatty acid ester contains a compound represented by the following general formula (3) or (4) The magnetic recording medium according to any one of the above.
CH 3 (CH 2 ) k COOH (1)
(However, in the general formula (1), k is an integer selected from the range of 14 or more and 22 or less.)
CH 3 (CH 2) n CH = CH (CH 2) m COOH ··· (2)
(However, in the general formula (2), the sum of n and m is an integer selected from the range of 12 or more and 20 or less.)
CH 3 (CH 2) p COO (CH 2) q CH 3 ··· (3)
(However, in the general formula (3), p is an integer selected from the range of 14 to 22 and q is an integer selected from the range of 2 to 5).
CH 3 (CH 2) r COO- (CH 2) s CH (CH 3) 2 ··· (4)
(However, in the general formula (4), r is an integer selected from the range of 14 to 22 and s is an integer selected from the range of 1 to 3).
(17)
The magnetic layer contains magnetic powder,
The magnetic recording medium according to any one of (1) to (16), wherein the magnetic powder contains hexagonal ferrite, ε iron oxide, or Co-containing spinel ferrite.
(18)
The hexagonal ferrite contains at least one of Ba and Sr,
The magnetic recording medium according to (17), wherein the ε iron oxide contains at least one of Al and Ga.
(19)
The magnetic recording medium according to any one of (1) to (18),
A storage unit having an area for writing adjustment information for adjusting the tension applied in the longitudinal direction of the magnetic recording medium.
(20)
A communication unit that communicates with the recording/reproducing device,
The adjustment information received from the recording/reproducing apparatus via the communication unit is stored in the area, and the adjustment information is read from the area in response to a request from the recording/reproducing apparatus, and is transmitted via the communication unit. The cartridge according to (19), further comprising: a control unit for transmitting to the recording/reproducing apparatus.
10 カートリッジ
11 カートリッジメモリ
31 アンテナコイル
32 整流・電源回路
33 クロック回路
34 検波・変調回路
35 コントローラ
36 メモリ
36A 第1の記憶領域
36B 第2の記憶領域
41 基体
42 下地層
43 磁性層
44 バック層
50、50A 記録再生装置
51 スピンドル51
52 リール52
53 スピンドル駆動装置
54 リール駆動装置
55 ガイドローラ
56 磁気ヘッド
57 リーダライタ
58 通信インターフェース
59 制御装置
60 ネットワーク
61 湿度計61
62 PC
63 温度計
64 湿度計
100、100A 記録再生システム
110 サーボフレーム
111 サーボサブフレーム1
111A Aバースト
111B Bバースト
112 サーボサブフレーム2
112C Cバースト
112C Cバースト
113 サーボストライプ
MT 磁気テープ
SB サーボバンド
DB データバインド
10
52
53 spindle drive
62 PC
63
111A A burst 111B B burst 112 Servo subframe 2
112C C burst 112C C burst 113 Servo stripe MT Magnetic tape SB Servo band DB Data bind
Claims (36)
基体と、
前記基体上に設けられた下地層と、
前記下地層上に設けられた磁性層と、
前記基体の前記下地層とは反対側の面に設けられたバック層と
を備え、
前記基体は、ポリエステルを含み、前記基体の平均厚みが4.2μm以下であり、
前記下地層および前記磁性層は、潤滑剤を含み、
前記磁性層表面の算術平均粗さRaは、2.5nm以下であり、
前記磁気記録媒体が洗浄、乾燥された状態において測定された、前記磁気記録媒体の全体のBET比表面積は、3.5m2/g以上7.0m2/g以下であり、
前記磁性層の垂直方向における角形比は、65%以上であり、
前記磁性層の平均厚みは、80nm以下であり、
前記磁気記録媒体の平均厚みは、5.6μm以下であり、
前記磁性層にはサーボパターンが記録され、前記サーボパターンの非直線性を示す統計値σSWは、24nm以下である磁気記録媒体。 A tape-shaped magnetic recording medium,
A substrate,
A base layer provided on the base,
A magnetic layer provided on the underlayer ,
A back layer provided on the surface of the base opposite to the base layer ,
The substrate contains polyester, and the average thickness of the substrate is 4.2 μm or less,
The underlayer and the magnetic layer include a lubricant,
Arithmetic average roughness Ra of the magnetic layer table surface is at 2.5nm or less,
The BET specific surface area of the entire magnetic recording medium measured in a state where the magnetic recording medium is washed and dried is 3.5 m 2 /g or more and 7.0 m 2 /g or less,
The squareness ratio of the magnetic layer in the vertical direction is 65% or more,
The average thickness of the magnetic layer is 80 nm or less,
The average thickness of the magnetic recording medium is 5.6 μm or less,
A magnetic recording medium in which a servo pattern is recorded on the magnetic layer, and a statistical value σ SW indicating the nonlinearity of the servo pattern is 24 nm or less.
基体と、
前記基体上に設けられた下地層と、
前記下地層上に設けられた磁性層と、
前記基体の前記下地層とは反対側の面に設けられたバック層と
を備え、
前記基体は、ポリエステルを含み、
前記下地層および前記磁性層は、潤滑剤を含み、
前記磁性層表面の算術平均粗さRaは、2.5nm以下であり、
前記磁気記録媒体が洗浄、乾燥された状態において測定された、前記磁気記録媒体の全体のBET比表面積は、4.5m2/g以上7.0m2/g以下であり、
前記磁性層の垂直方向における角形比は、65%以上であり、
前記磁性層の平均厚みは、80nm以下であり、
前記磁気記録媒体の平均厚みは、5.6μm以下であり、
前記磁性層にはサーボパターンが記録され、前記サーボパターンの非直線性を示す統計値σSWは、24nm以下である磁気記録媒体。 A tape-shaped magnetic recording medium,
A substrate,
A base layer provided on the base,
A magnetic layer provided on the underlayer ,
A back layer provided on the surface of the base opposite to the base layer ,
The substrate comprises polyester,
The underlayer and the magnetic layer include a lubricant,
Arithmetic average roughness Ra of the magnetic layer table surface is at 2.5nm or less,
The BET specific surface area of the entire magnetic recording medium measured in a state where the magnetic recording medium is washed and dried is 4.5 m 2 /g or more and 7.0 m 2 /g or less,
The squareness ratio of the magnetic layer in the vertical direction is 65% or more,
The average thickness of the magnetic layer is 80 nm or less,
The average thickness of the magnetic recording medium is 5.6 μm or less,
A magnetic recording medium in which a servo pattern is recorded on the magnetic layer, and a statistical value σ SW indicating the nonlinearity of the servo pattern is 24 nm or less.
前記データトラックの幅は、2000nm以下である請求項1または2に記載の磁気記録媒体。 The magnetic layer is configured to form a plurality of data tracks,
The width of the data track, magnetic recording medium according to claim 1 or 2 is 2000nm or less.
前記脂肪酸が下記一般式(1)または(2)で示される化合物を含み、且つ、前記脂肪酸エステルが下記一般式(3)または(4)で示される化合物を含む請求項1または2に記載の磁気記録媒体。
CH3(CH2)kCOOH ・・・(1)
(但し、前記一般式(1)において、kは14以上22以下の範囲から選ばれる整数である。)
CH3(CH2)nCH=CH(CH2)mCOOH ・・・(2)
(但し、前記一般式(2)において、nとmとの和は12以上20以下の範囲から選ばれる整数である。)
CH3(CH2)pCOO(CH2)qCH3 ・・・(3)
(但し、前記一般式(3)において、pは14以上22以下の範囲から選ばれる整数であり、qは2以上5以下の範囲から選ばれる整数である。)
CH3(CH2)rCOO−(CH2)sCH(CH3)2 ・・・(4)
(但し、前記一般式(4)において、rは14以上22以下の範囲から選ばれる整数であり、sは1以上3以下の範囲から選ばれる整数である。) The lubricant contains at least one selected from fatty acids and fatty acid esters,
It includes compounds wherein the fatty acid is represented by the following general formula (1) or (2), and, wherein the fatty acid ester according to claim 1 or 2 comprising a compound represented by the following general formula (3) or (4) Magnetic recording medium.
CH 3 (CH 2 ) k COOH (1)
(However, in the general formula (1), k is an integer selected from the range of 14 or more and 22 or less.)
CH 3 (CH 2) n CH = CH (CH 2) m COOH ··· (2)
(However, in the general formula (2), the sum of n and m is an integer selected from the range of 12 or more and 20 or less.)
CH 3 (CH 2) p COO (CH 2) q CH 3 ··· (3)
(However, in the general formula (3), p is an integer selected from the range of 14 to 22 and q is an integer selected from the range of 2 to 5).
CH 3 (CH 2) r COO- (CH 2) s CH (CH 3) 2 ··· (4)
(However, in the general formula (4), r is an integer selected from the range of 14 to 22 and s is an integer selected from the range of 1 to 3).
前記磁性粉は、六方晶フェライト、ε酸化鉄またはCo含有スピネルフェライトを含む請求項1または2に記載の磁気記録媒体。 The magnetic layer contains magnetic powder,
The magnetic powder, the magnetic recording medium according to claim 1 or 2 comprising a hexagonal ferrite, epsilon iron oxide or Co-containing spinel ferrite.
前記ε酸化鉄は、AlおよびGaのうちの少なくとも1種を含む請求項18に記載の磁気記録媒体。 The hexagonal ferrite contains at least one of Ba and Sr,
The magnetic recording medium according to claim 18 , wherein the ε iron oxide contains at least one of Al and Ga.
前記磁性粉の平均粒子サイズは、12nm以上25nm以下である請求項1または2に記載の磁気記録媒体。The magnetic recording medium according to claim 1, wherein the average particle size of the magnetic powder is 12 nm or more and 25 nm or less.
前記磁気記録媒体の長手方向にかかるテンションを調整するための調整情報を書き込む領域を有する記憶部と
を備えるカートリッジ。 The magnetic recording medium according to any one of claims 1 to 34 ,
A storage unit having an area for writing adjustment information for adjusting the tension applied in the longitudinal direction of the magnetic recording medium.
前記通信部を介して前記記録再生装置から受信した前記調整情報を前記領域に記憶し、かつ、前記記録再生装置の要求に応じて、前記領域から前記調整情報を読み出し、前記通信部を介して前記記録再生装置に送信する制御部と
をさらに備える請求項35に記載のカートリッジ。 A communication unit that communicates with the recording/reproducing device,
The adjustment information received from the recording/reproducing apparatus via the communication unit is stored in the area, and the adjustment information is read from the area in response to a request from the recording/reproducing apparatus, and is transmitted via the communication unit. 36. The cartridge according to claim 35 , further comprising: a control unit for transmitting to the recording/reproducing apparatus.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019212632A JP6729780B1 (en) | 2019-11-25 | 2019-11-25 | Magnetic recording medium and cartridge |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019212632A JP6729780B1 (en) | 2019-11-25 | 2019-11-25 | Magnetic recording medium and cartridge |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019151589A Division JP6624332B1 (en) | 2019-08-21 | 2019-08-21 | Magnetic recording medium and cartridge |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6729780B1 true JP6729780B1 (en) | 2020-07-22 |
| JP2021034097A JP2021034097A (en) | 2021-03-01 |
Family
ID=71663934
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019212632A Active JP6729780B1 (en) | 2019-11-25 | 2019-11-25 | Magnetic recording medium and cartridge |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6729780B1 (en) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3564707B2 (en) * | 1993-02-18 | 2004-09-15 | 株式会社日立製作所 | Magnetic recording media |
| JP4278001B2 (en) * | 2004-09-30 | 2009-06-10 | 日立マクセル株式会社 | Magnetic tape recording / reproducing method and recording / reproducing apparatus |
| JP2007273036A (en) * | 2006-03-31 | 2007-10-18 | Fujifilm Corp | Magnetic recording medium |
| US7910234B2 (en) * | 2006-04-28 | 2011-03-22 | Imation Corp. | Magnetic recording medium having improved durability for high density applications |
| JP6556101B2 (en) * | 2016-06-23 | 2019-08-07 | 富士フイルム株式会社 | Magnetic tape and magnetic tape device |
| WO2019159466A1 (en) * | 2018-02-16 | 2019-08-22 | ソニー株式会社 | Magnetic recording medium |
-
2019
- 2019-11-25 JP JP2019212632A patent/JP6729780B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021034097A (en) | 2021-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6590105B1 (en) | Magnetic recording medium and cartridge | |
| JP6590106B1 (en) | Magnetic recording medium and cartridge | |
| JP6624332B1 (en) | Magnetic recording medium and cartridge | |
| WO2020027331A1 (en) | Cartridge memory, tape cartridge, and data management system | |
| JP6635220B1 (en) | Magnetic recording medium, cartridge and recording / reproducing device | |
| JP6747570B1 (en) | Magnetic recording medium, cartridge and recording/reproducing apparatus | |
| JP6888718B2 (en) | Magnetic recording media and cartridges | |
| JP7056635B2 (en) | Magnetic recording media and cartridges | |
| JP6992928B2 (en) | Magnetic recording media and cartridges | |
| JP7342932B2 (en) | Magnetic recording media, cartridges and recording/playback devices | |
| WO2022014644A1 (en) | Magnetic recording medium and cartridge | |
| JP6729780B1 (en) | Magnetic recording medium and cartridge | |
| JP7327561B2 (en) | Magnetic recording media and cartridges | |
| JP6743991B1 (en) | Cartridge and recording/reproducing device | |
| JP6743960B1 (en) | Magnetic recording medium, cartridge and recording/reproducing apparatus | |
| JP6733792B1 (en) | Magnetic recording medium and cartridge | |
| JP6733793B1 (en) | Magnetic recording medium and cartridge | |
| JP7243690B2 (en) | Magnetic recording media and cartridges | |
| WO2023190541A1 (en) | Magnetic recording medium and cartridge | |
| JP6690769B1 (en) | Magnetic recording medium and cartridge | |
| WO2022211065A1 (en) | Magnetic recording medium and cartridge |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191125 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200521 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200521 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200615 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6729780 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |