JP6618445B2 - Hydraulic control device for work vehicle - Google Patents
Hydraulic control device for work vehicle Download PDFInfo
- Publication number
- JP6618445B2 JP6618445B2 JP2016191356A JP2016191356A JP6618445B2 JP 6618445 B2 JP6618445 B2 JP 6618445B2 JP 2016191356 A JP2016191356 A JP 2016191356A JP 2016191356 A JP2016191356 A JP 2016191356A JP 6618445 B2 JP6618445 B2 JP 6618445B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- pilot
- valve
- pilot pressure
- hydraulic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Fluid-Pressure Circuits (AREA)
- Operation Control Of Excavators (AREA)
Description
本発明は、例えば油圧ショベル、油圧クレーン、ホイールローダ等に用いられる作業車両用油圧制御装置に関し、特に、スプール弁からなる方向制御弁を電子制御するようにした作業車両用油圧制御装置に関する。 The present invention relates to a work vehicle hydraulic control device used in, for example, a hydraulic excavator, a hydraulic crane, a wheel loader, and the like, and more particularly to a work vehicle hydraulic control device that electronically controls a directional control valve including a spool valve.
一般に、油圧ショベルに代表される作業車両には、油圧アクチュエータへの圧油の給排を制御する方向制御弁が設けられている。この方向制御弁は、バルブ本体に摺動可能に挿嵌されたスプール弁体を移動して圧油の流れを切換えるスプール弁により構成されている。スプール弁体の軸方向両端側には、一対の受圧室が設けられ、各受圧室にパイロット圧油を供給して前記スプール弁体の移動を制御する。 In general, a work vehicle represented by a hydraulic excavator is provided with a direction control valve that controls supply and discharge of pressure oil to and from a hydraulic actuator. This directional control valve is constituted by a spool valve that switches a flow of pressure oil by moving a spool valve body that is slidably fitted to the valve body. A pair of pressure receiving chambers are provided at both axial ends of the spool valve body, and pilot pressure oil is supplied to each pressure receiving chamber to control the movement of the spool valve body.
特に、近年では作業車両の電子制御化の技術が進み、操作系においても従来のパイロット圧油方式から電磁比例減圧弁を用いて方向制御弁の移動を制御する技術が普及している。方向制御弁の軸方向両端側の各受圧室には、電磁比例減圧弁がそれぞれ設けられ、該各電磁比例減圧弁には、オペレータのレバー操作に応じた電気信号が出力される。各電磁比例減圧弁は、前記電気信号に応じたパイロット圧力を方向制御弁の各受圧室に発生させ、このパイロット圧力によりスプール弁体の移動を制御する。 In particular, in recent years, technology for electronic control of work vehicles has progressed, and technology for controlling the movement of a directional control valve using an electromagnetic proportional pressure reducing valve from a conventional pilot pressure oil system has also become widespread in an operation system. Each pressure receiving chamber at both axial ends of the direction control valve is provided with an electromagnetic proportional pressure reducing valve, and an electric signal corresponding to the operator's lever operation is output to each electromagnetic proportional pressure reducing valve. Each electromagnetic proportional pressure reducing valve generates a pilot pressure corresponding to the electric signal in each pressure receiving chamber of the direction control valve, and controls the movement of the spool valve body by the pilot pressure.
ところで、従来技術の場合は、1つの方向制御弁に対して2つの電磁比例減圧弁を設ける構成としているために、油圧制御装置全体が大型化してしまい、装置の小型、軽量化を図るのが難しいという問題がある。また、例えばエンジンの駆動と同時にパイロットポンプが作動したときに、方向制御弁の両端側の受圧室に異なるパイロット圧力が供給される可能性があり、これによって方向制御弁が中立位置から切換わると、油圧アクチュエータが誤作動を起こす虞れがある。 By the way, in the case of the prior art, since two electromagnetic proportional pressure reducing valves are provided for one directional control valve, the entire hydraulic control device is increased in size, and the device can be reduced in size and weight. There is a problem that it is difficult. Further, for example, when the pilot pump is operated simultaneously with the driving of the engine, there is a possibility that different pilot pressures are supplied to the pressure receiving chambers on both ends of the directional control valve, so that the directional control valve is switched from the neutral position. The hydraulic actuator may malfunction.
本発明は上述した従来技術の問題に鑑みなされたもので、本発明の目的は、出力ポートが1つの電磁比例減圧弁を用いて方向制御弁の両方向の移動を制御することができ、かつ起動時の作業車両の誤作動を抑止することができる作業車両用油圧制御装置を提供することにある。 The present invention has been made in view of the above-mentioned problems of the prior art, and an object of the present invention is to control the movement of the directional control valve in both directions by using an electromagnetic proportional pressure reducing valve with one output port, and to start it. An object of the present invention is to provide a hydraulic control device for a work vehicle that can prevent malfunction of the work vehicle at the time.
上述した課題を解決するために、本発明は、作業車両の動力源によって駆動されるメインの油圧ポンプおよびパイロットポンプと、前記作業車両に設けられ、前記油圧ポンプから供給される圧油により駆動される油圧アクチュエータと、前記油圧ポンプと前記油圧アクチュエータとの間に設けられ、前記パイロットポンプからのパイロット圧が一対の受圧室に供給されることにより前記油圧アクチュエータへの圧油の供給,排出を制御する方向制御弁と、前記方向制御弁を切換え操作して前記油圧アクチュエータの作動,停止を制御するため外部からの操作に従って電気信号を出力する電気式操作装置と、前記電気式操作装置からの前記電気信号に従って前記方向制御弁の各受圧室に供給するパイロット圧を可変に制御するパイロット圧制御装置と、を備えた作業車両用油圧制御装置に適用される。 In order to solve the above-described problems, the present invention provides a main hydraulic pump and a pilot pump that are driven by a power source of a work vehicle, and a hydraulic oil that is provided in the work vehicle and is supplied from the hydraulic pump. The hydraulic actuator is provided between the hydraulic pump and the hydraulic actuator, and the pilot pressure from the pilot pump is supplied to a pair of pressure receiving chambers to control the supply and discharge of the pressure oil to the hydraulic actuator. A directional control valve that performs switching operation of the directional control valve to control operation and stop of the hydraulic actuator, and an electric operation device that outputs an electric signal according to an operation from the outside, and the electric operation device from the electric operation device Pilot pressure control for variably controlling the pilot pressure supplied to each pressure receiving chamber of the directional control valve according to an electric signal It is applied to a hydraulic control device for a work vehicle having a location, a.
そして、本発明が採用する構成の特徴は、前記パイロット圧制御装置は、前記パイロットポンプの吐出側に設けられたパイロット圧吐出管路と、前記方向制御弁の各受圧室のうち一方の受圧室と前記パイロット圧吐出管路との間に設けられ、前記一方の受圧室に対して前記パイロットポンプからの圧油を第1パイロット圧として供給するための第1パイロット圧供給管路と、前記方向制御弁の各受圧室のうち他方の受圧室と前記パイロット圧吐出管路との間に設けられ、前記他方の受圧室に対して前記パイロットポンプからの圧油を第2パイロット圧として供給するための第2パイロット圧供給管路と、前記第1パイロット圧供給管路に設けられ、前記パイロットポンプから前記第1パイロット圧供給管路を介して前記方向制御弁の一方の受圧室に供給される前記第1パイロット圧を前記電気信号に応じた圧力に制御する電磁比例減圧弁と、前記第2パイロット圧供給管路に設けられ、前記パイロットポンプから前記第2パイロット圧供給管路を介して前記方向制御弁の他方の受圧室に供給される前記第2パイロット圧を所定の圧力に減圧する減圧弁と、該減圧弁と並列に前記第2パイロット圧供給管路に接続して設けられ、前記他方の受圧室から前記第2パイロット圧供給管路に向けて圧油が流れるのを許容し逆向きの流れを遮断するチェック弁と、前記パイロット圧吐出管路に設けられ、前記第1,第2パイロット圧供給管路を前記パイロット圧吐出管路とタンクとのいずれか一方に選択的に接続するように切換えられる電磁切換弁と、前記動力源の駆動情報と前記電気式操作装置からの電気信号に従って前記電磁比例減圧弁と前記電磁切換弁とを制御するコントローラと、を含んで構成され、前記コントローラは、前記動力源の起動を判定する判定手段を備え、該判定手段が前記動力源の起動と判断したときに、前記方向制御弁を中立位置とするように前記電磁比例減圧弁を制御し、前記電磁切換弁を、前記第1,第2パイロット圧供給管路を前記タンクから前記パイロット圧吐出管路側に切換えて接続するように制御することにある。 A feature of the configuration adopted by the present invention is that the pilot pressure control device includes a pilot pressure discharge pipe provided on the discharge side of the pilot pump and one pressure receiving chamber among the pressure receiving chambers of the directional control valve. A first pilot pressure supply line for supplying pressure oil from the pilot pump as a first pilot pressure to the one pressure receiving chamber, and the direction Among the pressure receiving chambers of the control valve, provided between the other pressure receiving chamber and the pilot pressure discharge conduit, and for supplying the pressure oil from the pilot pump as the second pilot pressure to the other pressure receiving chamber The second pilot pressure supply line and the first pilot pressure supply line are provided to receive one of the directional control valves from the pilot pump via the first pilot pressure supply line. An electromagnetic proportional pressure reducing valve for controlling the first pilot pressure supplied to the chamber to a pressure corresponding to the electrical signal; and a second pilot pressure supply pipe provided from the pilot pump to the second pilot pressure supply pipe. A pressure reducing valve for reducing the second pilot pressure supplied to the other pressure receiving chamber of the directional control valve through a passage to a predetermined pressure, and a second pilot pressure supply line connected in parallel with the pressure reducing valve. A check valve that allows pressure oil to flow from the other pressure receiving chamber toward the second pilot pressure supply line and blocks a reverse flow; and is provided in the pilot pressure discharge line, An electromagnetic switching valve that is switched to selectively connect the first and second pilot pressure supply lines to one of the pilot pressure discharge line and the tank; drive information of the power source; and the electric type operation A controller for controlling the electromagnetic switching valve and the solenoid proportional pressure reducing valve according to put these electrical signals, is configured to include a, the controller includes a determination means for determining activation of the power source, is the determination means When it is determined that the power source is activated, the electromagnetic proportional pressure reducing valve is controlled so that the directional control valve is in a neutral position, and the electromagnetic switching valve is connected to the first and second pilot pressure supply lines. in Rukoto be controlled so as to be connected is switched to the pilot圧吐extraction tube roadside from the tank.
上述の如く、本発明によれば、例えば出力ポートが1つの電磁比例減圧弁を用いるだけで、方向制御弁を両方向に移動して制御することができ、油圧制御装置全体の小型、軽量化を図ることができる。また、動力源の起動時においては、方向制御弁の両端側の各受圧室に供給するパイロット圧に圧力差が生じるのを抑えることができる。このため、起動時における方向制御弁および油圧アクチュエータの誤作動を抑止でき、装置の信頼性、安全性を高めることができる。 As described above, according to the present invention, for example, the directional control valve can be controlled by moving in both directions only by using an electromagnetic proportional pressure reducing valve with one output port, thereby reducing the size and weight of the entire hydraulic control device. Can be planned. Further, when the power source is activated, it is possible to suppress the occurrence of a pressure difference in the pilot pressure supplied to the pressure receiving chambers on both ends of the directional control valve. For this reason, malfunction of the direction control valve and the hydraulic actuator at the time of starting can be suppressed, and the reliability and safety of the apparatus can be improved.
以下、本発明の実施の形態による作業車両用油圧制御装置として、作業車両の代表例である油圧ショベルの油圧制御装置を例に挙げ、添付図面に従って詳細に説明する。 Hereinafter, as a work vehicle hydraulic control apparatus according to an embodiment of the present invention, a hydraulic control apparatus for a hydraulic excavator, which is a representative example of a work vehicle, will be described as an example and described in detail with reference to the accompanying drawings.
図において、エンジン1は、油圧ショベルの動力源を構成している。このエンジン1は、例えば油圧ショベルの上部旋回体(図示せず)に搭載され、メインの油圧ポンプ2をパイロットポンプ4と一緒に回転駆動する。ここで、油圧ポンプ2は、例えば可変容量型または固定容量型のラジアルピストン式油圧ポンプからなり、タンク3と共にメインの油圧源を構成している。
In the figure, the
油圧ポンプ2は、他の油圧ポンプであるパイロットポンプ4と共にエンジン1により駆動され、パイロットポンプ4は、タンク3と共にパイロット油圧源を構成している。吐出管路5はメインの油圧ポンプ2の吐出側に接続され、吐出管路5の先端側は、圧油の供給管路6とセンタバイパス管路7とに並列に接続されている。油圧ポンプ2から吐出された圧油は、吐出管路5から供給管路6およびセンタバイパス管路7に向けて供給される。
The
センタバイパス管路7の途中位置には、夫々スプール弁からなる複数の方向制御弁8〜11が間隔をもって互いに並行となるように配設されている。供給管路6は、これらの方向制御弁8〜10をそれぞれ個別に迂回してセンタバイパス管路7と連通するようにパラレル回路を構成している。センタバイパス管路7を流通する圧油は、全ての方向制御弁8〜11が中立位置(I)にあるときに、タンク3内へと還流される。なお、方向制御弁8〜11のうち最下流側に位置する方向制御弁11が、中立位置(I)から切換位置(II)または(III)のいずれかに完全に切換えられたときには、センタバイパス管路7を介したタンク3への圧油の還流が方向制御弁11によって遮断される。
A plurality of
方向制御弁8〜11は、例えば6ポート3位置のスプール弁からなる油圧パイロット式方向制御弁により構成され、センタバイパス管路7の途中位置にそれぞれ並べて配置されている。このうち、最上流側に位置する方向制御弁8は、その左,右両側に油圧パイロット部としての受圧室8A,8Bと、弱ばねからなる中立位置付勢ばね8C,8Dとが設けられている。他の方向制御弁9〜11についても同様に、油圧パイロット部としての受圧室9A〜11A,9B〜11Bと、弱ばねからなる中立位置付勢ばね9C〜11C,9D〜11Dとが設けられている。
The
方向制御弁8〜11のうち方向制御弁8は、例えばブーム用制御弁を構成し、油圧アクチュエータとしてのブームシリンダ12に対する圧油の供給、停止を制御してブーム(図示せず)を俯仰動(作動)または停止させる。また、方向制御弁9は、例えばアーム用制御弁を構成し、油圧アクチュエータとしてのアームシリンダ13に対する圧油の供給、停止を制御してアーム(図示せず)を上,下に回動(作動)または停止させる。
Of the
方向制御弁10は、例えばバケット用制御弁を構成し、油圧アクチュエータとしてのバケットシリンダ14(即ち、作業具シリンダ)に対する圧油の供給、停止を制御してバケット等の作業具(図示せず)を上,下に回動(作動)または停止させる。さらに、方向制御弁11は、例えば予備の制御弁を構成し、油圧アクチュエータとしての予備のシリンダ15に対する圧油の供給、停止を制御して予備機器(図示せず)を作動または停止させる。
The
なお、油圧ショベルには、ブームシリンダ12、アームシリンダ13、バケットシリンダ14および予備のシリンダ15の他に、旋回用および走行用の油圧モータ(いずれも図示せず)等が油圧アクチュエータとして一般的に設けられている。しかし、図1に示す油圧回路では、その説明を簡略化するために作業系の油圧アクチュエータの代表例として前記シリンダ12〜15を示したものである。
In addition to the
電気レバー装置16〜19は、方向制御弁8〜11を切換え操作して前記油圧アクチュエータ(例えば、ブームシリンダ12、アームシリンダ13、バケットシリンダ14、予備のシリンダ15)の作動,停止を制御するため電気式操作装置である。電気レバー装置16〜19は、夫々のレバー操作を個別に検出する操作検出器(いずれも図示せず)を備え、夫々の検出信号を後述のコントローラ34に出力する。例えば、油圧ショベルのオペレータがレバー操作を行うことにより、電気レバー装置16〜19は、外部からのレバー操作に対応して増減する電気信号をコントローラ34に出力する。
The
ここで、電気レバー装置16は、ブーム用の方向制御弁8を切換え操作し、これによって、ブームシリンダ12の作動,停止を制御する。電気レバー装置17は、アーム用の方向制御弁9を切換え操作し、これにより、アームシリンダ13の作動,停止を制御する。電気レバー装置18は、バケット用の方向制御弁10を切換え操作し、これにより、バケットシリンダ14の作動,停止を制御する。電気レバー装置19は、予備の方向制御弁11を切換え操作し、これによって、予備のシリンダ15の作動,停止を制御する。
Here, the
パイロット圧制御装置20は、パイロットポンプ4からパイロット圧吐出管路21を介して供給されるパイロット圧油の圧力(即ち、パイロット圧)を制御する。換言すると、パイロット圧制御装置20は、エンジン1の起動の有無と、電気レバー装置16〜19から出力される電気信号(即ち、レバー操作量の検出信号)とに従って方向制御弁8〜11の各受圧室8A〜11A,8B〜11Bに供給されるパイロット圧Pa,Pbを制御するものである。
The pilot
ここで、パイロット圧制御装置20は、パイロット圧吐出管路21、第1,第2パイロット圧供給管路22A,22B、電磁比例減圧弁27〜30、減圧弁31、チェック弁32、電磁切換弁33およびコントローラ34を含んで構成されている。パイロット圧吐出管路21は、パイロットポンプ4の吐出側に接続して設けられ、パイロットポンプ4から吐出されるパイロット圧油を第1,第2パイロット圧供給管路22A,22Bに流通させる。
Here, the pilot
第1パイロット圧供給管路22Aは、後述の電磁切換弁33を介してタンク3とパイロット圧吐出管路21との何れか一方に切換え接続される共通管路22Cと、該共通管路22Cを介して第1パイロット圧Paが導かれる複数の第1パイロット管路23A〜26Aとを含んで構成されている。第2パイロット圧供給管路22Bは、第1パイロット圧供給管路22Aと共通な前記共通管路22Cと、共通管路22Cを介して第2パイロット圧Pbが導かれる複数の第2パイロット管路23B〜26Bとを含んで構成されている。
The first pilot
第1,第2パイロット圧供給管路22A,22Bのうち、第1,第2パイロット管路23A,23Bは、パイロットポンプ4から共通管路22Cを介して導かれるパイロット圧油を、ブーム用のスプール弁(方向制御弁8)の受圧室8A,8Bに対し第1,第2パイロット圧Pa,Pbとして供給する管路である。また、第1,第2パイロット管路24A,24Bは、同じくパイロットポンプ4から共通管路22Cを介して導かれるパイロット圧油を、アーム用のスプール弁(方向制御弁9)の受圧室9A,9Bに対し第1,第2パイロット圧Pa,Pbとして供給するパイロット管路である。
Of the first and second pilot
他の第1,第2パイロット管路25A,25Bは、同じく共通管路22Cを介して導かれる前記パイロット圧油をバケット用のスプール弁(方向制御弁10)の受圧室10A,10Bに対し第1,第2パイロット圧Pa,Pbとして供給する管路である。さらに、別の第1,第2パイロット管路26A,26Bは、同じく共通管路22Cを介して導かれる前記パイロット圧油を予備のスプール弁(方向制御弁11)の受圧室11A,11Bに対し第1,第2パイロット圧Pa,Pbとして供給する管路である。
The other first and
第1パイロット圧供給管路22Aには、共通管路22Cと第1パイロット管路23A〜26Aとの間にそれぞれ電磁比例減圧弁27〜30が設けられている。電磁比例減圧弁27は、1つの出力ポート27A、ポンプポート27Pおよびタンクポート27Tを有する3ポート2位置の電磁比例制御弁により構成されている。同じく図2に示すように、電磁比例減圧弁28〜30も、1つの出力ポート28A〜30T、ポンプポート28P〜30Pおよびタンクポート28T〜30Tを有する3ポート2位置の電磁比例制御弁により構成されている。
In the first pilot
電磁比例減圧弁27〜30は、コントローラ34からの指令信号(電気信号)に応じて、電流値が最小(零を含む)のときに低圧位置(a)となり、電流値が最大のときには昇圧位置(b)となるように切換わる。これにより、電磁比例減圧弁27〜30は、コントローラ34からの指令信号(電気信号の電流値)に応じて低圧位置(a)と昇圧位置(b)との間で電磁比例制御されるように切換えられる。
In response to a command signal (electrical signal) from the
電磁比例減圧弁27〜30は、方向制御弁8〜11の弁本体を構成する弁ハウジング(図示せず)内に、例えば受圧室8A〜11Aの近傍に位置してそれぞれ設けられている。複数の方向制御弁8〜11は、例えば多連弁装置として構成される。このような多連弁装置の弁ハウジング(図示せず)のうち、各方向制御弁8〜11のスプール弁体の左,右両側には、油圧パイロット部としての受圧室8A〜11A,8B〜11Bが設けられる。このような場合、電磁比例減圧弁27〜30は、例えば受圧室8A〜11Aの近傍に位置して前記弁ハウジング内にそれぞれ設けられる。これにより、方向制御弁8〜11の弁ハウジングには、例えば受圧室8A〜11Aの近傍に位置して電磁比例減圧弁27〜30をコンパクトに収容することができる。
The electromagnetic proportional
電磁比例減圧弁27〜30のうち電磁比例減圧弁27は、パイロットポンプ4から第1パイロット圧供給管路22Aの共通管路22C、第1パイロット管路23Aを介してブーム用の方向制御弁8の受圧室8Aに供給される第1パイロット圧Paを、電気レバー装置16(コントローラ34)からの前記電気信号(指令信号)に応じた圧力に可変に制御する。即ち、電磁比例減圧弁27が低圧位置(a)にある間は、第1パイロット圧Paがタンク圧と同等の圧力まで低下する。しかし、電磁比例減圧弁27が低圧位置(a)から昇圧位置(b)に切換わり始めると、このときのストローク量に比例して第1パイロット圧Paが上昇する。電磁比例減圧弁27が昇圧位置(b)に完全に切換わったときには、ストローク量が最大となって第1パイロット圧Paが最大の圧力まで昇圧される。
Among the electromagnetic proportional
また、電磁比例減圧弁28は、同じく共通管路22Cから第1パイロット管路24Aを介してアーム用の方向制御弁9の受圧室9Aに供給される第1パイロット圧Paを、電気レバー装置17からの前記電気信号(指令信号)に応じた圧力に可変に制御する。電磁比例減圧弁28も、低圧位置(a)から昇圧位置(b)に切換わるときのストローク量に比例して第1パイロット圧Paが昇圧される。
Similarly, the electromagnetic proportional
電磁比例減圧弁29は、同じく共通管路22Cから第1パイロット管路25Aを介してバケット用の方向制御弁10の受圧室10Aに供給される第1パイロット圧Paを、電気レバー装置18からの前記電気信号(指令信号)に応じた圧力に可変に制御する。電磁比例減圧弁30は、同じく共通管路22Cから第1パイロット管路26Aを介して予備の方向制御弁11の受圧室11Aに供給される第1パイロット圧Paを、電気レバー装置19からの前記電気信号(指令信号)に応じた圧力に可変に制御するものである。
Similarly, the electromagnetic proportional
電磁比例減圧弁29,30についても、低圧位置(a)から昇圧位置(b)に切換わり始めると、このときのストローク量に比例して第1パイロット圧Paが上昇する。電磁比例減圧弁29,30が昇圧位置(b)に完全に切換わったときには、ストローク量が最大となって第1パイロット圧Paが最大の圧力まで昇圧される。
When the electromagnetic proportional
一方、第2パイロット圧供給管路22Bには、共通管路22Cと第2パイロット管路23B〜26Bとの間に単一の減圧弁31が設けられている。この減圧弁31は、パイロットポンプ4から第2パイロット圧供給管路22B(共通管路22C、第2パイロット管路23B〜26B)を介して方向制御弁8〜11の受圧室8B〜11Bに供給されるパイロット圧油を所定の圧力(即ち、減圧弁31の設定圧である第2パイロット圧Pb)に減圧する。
On the other hand, in the second pilot pressure supply line 22B, a single
この場合、減圧弁31は、複数の方向制御弁8〜11に対し共通した第2パイロット圧Pbを供給する単一の弁として設けられている。これにより、方向制御弁8〜11の受圧室8B〜11Bには、第2パイロット管路23B〜26Bから減圧弁31を介して共通に減圧された圧油の圧力(即ち、第2パイロット圧Pb)が供給される。
In this case, the
また、第2パイロット圧供給管路22Bには、減圧弁31と並列にチェック弁32が接続して設けられている。このチェック弁32は、他方の受圧室8B〜11B、第2パイロット管路23B〜26Bから共通管路22Cに向けて圧油が流れるのを許容し、逆向きの流れ(即ち、共通管路22Cから第2パイロット管路23B〜26B側に向けて圧油が流通するの)を遮断する。このため、エンジン1の起動後において、第2パイロット管路23B〜26B内の圧力は、減圧弁31とチェック弁32とによって所定の圧力(即ち、第2パイロット圧Pb)に保持されることになる。
A
電磁切換弁33は、パイロットポンプ4のパイロット圧吐出管路21と第1,第2パイロット圧供給管路22A,22Bの共通管路22Cとの間に設けられている。この電磁切換弁33は、前記共通管路22Cをパイロットポンプ4のパイロット圧吐出管路21とタンク3とのいずれか一方に選択的に接続するようにコントローラ34からの指令信号(電気信号)に応じて切換えられる。電磁切換弁33は、例えば3ポート2位置の電磁式切換弁により構成され、非励磁状態(電気信号が無いとき)では初期位置(c)となって、共通管路22Cをパイロット圧吐出管路21から遮断し、共通管路22Cをタンク3に接続する。一方、コントローラ34から指令(電気)信号が入力されて励磁状態になると、電磁切換弁33は初期位置(c)から作動位置(d)に切換わり、パイロット圧吐出管路21からの圧油を共通管路22Cに向けて流通させる。
The
コントローラ34は、パイロット圧制御装置20の一部を構成する制御手段であり、その入力側には、エンジン1および電気レバー装置16〜19等が接続されている。コントローラ34の出力側には、エンジン1、電磁比例減圧弁27〜30および電磁切換弁33等が接続されている。コントローラ34は、動力源となるエンジン1からの駆動情報と各電気レバー装置16〜19からの電気信号とに従って、これに対応した指令信号(電気信号)を電磁比例減圧弁27〜30と電磁切換弁33とに出力し、電磁比例減圧弁27〜30と電磁切換弁33とを切換え制御する。
The
ここで、コントローラ34は、例えばROM,RAMおよび/または不揮発性メモリ等からなるメモリ34Aを有している。このメモリ34Aには、例えば図5に示す制御処理を実行するためのプログラムと、図6〜図9に示す特性線35〜39に対応した制御マップ等とが格納されている。コントローラ34は、図5中のステップ2で示すように判定手段を備え、この判定手段は、エンジン1からの駆動情報に基づいてエンジン1が起動されているか否かを判定する。
Here, the
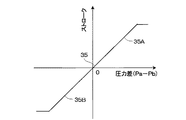
図6に示す特性線35は、例えば方向制御弁8の受圧室8A,8Bに供給されるパイロット圧Pa,Pb間の圧力差(Pa−Pb)と、方向制御弁8のストローク位置との関係を表している。方向制御弁8は、受圧室8Aのパイロット圧Paと受圧室8Bのパイロット圧Pbとが等しいときに、圧力差(Pa−Pb)が零となるので、方向制御弁8はストロークが零となって、図2に示す中立位置(I)に保持される。
The
受圧室8Aのパイロット圧Paが受圧室8Bのパイロット圧Pbよりも大きくなると、特性線部35A(図6中の第1象限)のように、方向制御弁8は正方向にストロークして中立位置(I)から切換位置(II)へと切換わる。逆に、受圧室8Aのパイロット圧Paが受圧室8Bのパイロット圧Pbよりも小さくなると、特性線部35B(図6中の第3象限)のように、方向制御弁8は負方向にストロークして中立位置(I)から切換位置(III)へと切換わる。
When the pilot pressure Pa in the
他の方向制御弁9〜11についても、前記方向制御弁8と同様に特性線35の如く切換え操作され、方向制御弁9〜11のストローク位置は、受圧室9A〜11A,9B〜11Bに供給されるパイロット圧Pa,Pb間の圧力差(Pa−Pb)によって決められる。図6に示す特性線35は、このような特性を表している。
The other
図7に示す特性線36は、コントローラ34からの指令信号に対する第1パイロット圧Paの変化特性を表している。例えば電磁比例減圧弁27の出力ポートに発生する第1パイロット圧Pa(即ち、受圧室8Aの圧力)は、コントローラ34からの指令信号(電流)に比例して変化し、指令信号を電流値Icとしたときに、第1パイロット圧Paは第2パイロット圧Pb(固定値)と同じ圧力になる。指令信号を電流値Icよりも大きくすると、第1パイロット圧Paは第2パイロット圧Pb(固定値)よりも大きい圧力に増大される。逆に、指令信号を電流値Icよりも小さくしたときには、第1パイロット圧Paは第2パイロット圧Pb(固定値)よりも小さい圧力に減少される。
A
図8に示す特性線37は、コントローラ34からの指令信号(電流)と方向制御弁8のストローク位置との関係を表している。特性線37は、図6に示す特性線35と図7に示す特性線36とを合成することにより求められる。図8に示すように、特性線37は、コントローラ34から例えば電磁比例減圧弁27に出力される指令信号(電流)に対し、方向制御弁8がどのように移動してストローク(切換位置)が変わるかを表している。
A
電磁比例減圧弁27に出力される指令信号(電流)が電流値Icよりも小さいときには、方向制御弁8が切換位置(III)側に向け図8中の負方向に移動してストロークする。指令信号(電流)が電流値Icに保持される間、方向制御弁8は中立位置(I)となってストロークが零となる。指令信号(電流)が電流値Icよりも大きいときには、方向制御弁8が切換位置(II)側に向け図8中の正方向に移動してストロークする。他の方向制御弁9〜11についても、前記方向制御弁8と同様に特性線37の如く切換え操作され、方向制御弁9〜11のストローク位置は、コントローラ34から電磁比例減圧弁28〜30に出力される夫々の指令信号(電流)によって決められる。
When the command signal (current) output to the electromagnetic proportional
図9に示す特性線38は、エンジン1の起動時にコントローラ34から電磁切換弁33に出力される指令信号の特性を表している。同じく特性線39は、エンジン1の起動時にコントローラ34から電磁比例減圧弁27〜30に夫々出力される指令信号の特性を表している。この場合、電磁比例減圧弁27〜30は、指令信号が電流値Icとなったときに出力ポート27A〜30Aに発生する第1パイロット圧Paが第2パイロット圧Pbと同じ圧力となる(図7参照)。エンジン1の起動時には、特性線39(電磁比例減圧弁27〜30)において電流値Icに到達してから時間差Δt(図9参照)だけ僅かに遅れて、特性線38のように電磁切換弁33に指令信号(電流)が出力される。なお、この場合の時間差Δtは、電磁切換弁33の起動のタイミングに遅れによる違和感が出ないよう、例えば0.1〜0.2secの範囲で設定されるのが望ましい。
A
本実施の形態による油圧ショベルの油圧制御装置は、上述の如き構成を有するもので、次に、その作動について図5を参照して説明する。 The hydraulic control device for a hydraulic excavator according to the present embodiment has the above-described configuration. Next, the operation thereof will be described with reference to FIG.
図5に示す処理動作がスタートすると、コントローラ34は、ステップ1でエンジン1の駆動情報を読込む。次のステップ2では、動力源としてのエンジン1が駆動(起動)されているか否かを判定する。エンジン1が駆動されるまではステップ2で「NO」と判定し、ステップ1以降の処理を繰返す。ステップ2で「YES」と判定したときには、エンジン1が起動されることにより、メインの油圧ポンプ2およびパイロットポンプ4が回転駆動される。このため、油圧ポンプ2からは吐出管路5に圧油が吐出され、この圧油は、供給管路6およびセンタバイパス管路7に向けて供給される。パイロットポンプ4からはパイロット圧吐出管路21にパイロット圧油が吐出される。
When the processing operation shown in FIG. 5 starts, the
この状態で、次のステップ3では、図9の特性線39のように指令信号を電磁比例減圧弁27〜30に夫々出力する。このとき、指令信号は電流値Icに制御されることにより、図2に示す如く、全ての方向制御弁8〜11を初期の中立位置(I)に保持できるように、全ての電磁比例減圧弁27〜30を低圧位置(a)と昇圧位置(b)との間で切換制御してスタンバイ状態とする。
In this state, in the
次のステップ4では、図9の特性線38のように指令信号を電磁切換弁33に出力する。このため、電磁切換弁33は、初期位置(c)から作動位置(d)に切換わり、パイロット圧吐出管路21からのパイロット圧油を共通管路22Cに向けて流通させる。これにより、第2パイロット圧供給管路22Bには、共通管路22Cと第2パイロット管路23B〜26Bとの間に設けられた単一の減圧弁31を介して第2パイロット圧Pb(減圧弁31の設定圧)が発生する。
In the
一方、第1パイロット圧供給管路22Aには、共通管路22Cと第1パイロット管路23A〜26Aとの間に設けられた電磁比例減圧弁27〜30を介して第1パイロット圧Paが発生し、このときの第1パイロット圧Paは、減圧弁31の設定圧である第2パイロット圧Pb(固定値)と等しくなるように、前記指令信号の電流値Icにより予め制御されている。
On the other hand, the first pilot pressure Pa is generated in the first pilot
このため、全ての方向制御弁8〜11は、一方の受圧室8A〜11Aに供給される第1パイロット圧Paと、他方の受圧室8B〜11Bに供給される第2パイロット圧Pbとが等しい圧力となって中立位置(I)に保持される。即ち、全ての方向制御弁8〜11は、予め付勢ばね8C〜11C,8D〜11Dにより中立位置(I)に置かれた状態で、エンジン1の起動後に電磁切換弁33が作動位置(d)に切換わって、一方の受圧室8A〜11Aと他方の受圧室8B〜11Bとには、第1パイロット圧Paと第2パイロット圧Pbとが実質的に等しい圧力で供給されるため、中立位置(I)に保持された状態に留まるようになる。
For this reason, as for all the direction control valves 8-11, the 1st pilot pressure Pa supplied to one
このように、電磁切換弁33に対する指令信号(特性線38)を、電磁比例減圧弁27〜30に対する指令信号(特性線39)が電流値Icに到達してから時間差Δt(図9参照)だけ僅かに遅らせて出力することにより、エンジン1の起動時において、方向制御弁8〜11の受圧室8A〜11A,8B〜11Bに供給する第1,第2パイロット圧Pa,Pbに圧力差が生じるのを抑えることができる。このため、エンジン1の起動時に方向制御弁8〜11を中立位置(I)に安定して保持することができ、電気レバー装置16〜19の操作前に油圧アクチュエータ(シリンダ12〜15)が誤作動するのを防ぐことができる。
In this way, the command signal (characteristic line 38) for the
次に、前述の如く、エンジン1により油圧ポンプ2およびパイロットポンプ4を駆動しているスタンバイ状態では、油圧ショベルのオペレータが電気レバー装置16〜19のいずれかを傾転操作したかをステップ5で読込む。次のステップ6では、電気レバー装置16〜19のいずれかが傾転操作された場合に、そのレバー操作量に応じてコントローラ34から対応の電磁比例減圧弁27,28,29または30に指令信号を出力し、該当する電磁比例減圧弁を低圧位置(a)と昇圧位置(b)との間で切換制御する。
Next, in the standby state in which the
例えば、図3に示すように、電気レバー装置16が矢示B方向に傾転操作された場合、コントローラ34は、電気レバー装置16からの電気信号に基づいた指令信号を電磁比例減圧弁27に出力する。このときの指令信号は、電気レバー装置16の矢示B方向への傾転操作により、電流値Icよりも小さくなるので、図7中に示す特性線36の如く、第1パイロット管路23Aに発生する第1パイロット圧Paは、第2パイロット管路23Bの第2パイロット圧Pb(減圧弁31の設定圧)よりも低い圧力となる。
For example, as shown in FIG. 3, when the
このため、方向制御弁8は、一方の受圧室8Aに供給される第1パイロット圧Paが他方の受圧室8Bに供給される第2パイロット圧Pbよりも低くなって、図3に示す如く中立位置(I)から切換位置(III)に切換わる。これにより、油圧ポンプ2から吐出された圧油は、方向制御弁8を介してブームシリンダ12のボトム側に供給され、ブームシリンダ12はロッド伸長方向に駆動される。
For this reason, the
一方、図4に示すように、電気レバー装置16が矢示A方向に傾転操作された場合、コントローラ34から電磁比例減圧弁27へと出力される指令信号は、電気レバー装置16の矢示A方向への傾転操作により、電流値Icよりも大きくなる。これにより、図7中に示す特性線36の如く、第1パイロット管路23Aに発生する第1パイロット圧Paは、第2パイロット管路23Bの第2パイロット圧Pb(減圧弁31の設定圧)よりも高い圧力となる。
On the other hand, as shown in FIG. 4, when the
このため、方向制御弁8は、一方の受圧室8Aに供給される第1パイロット圧Paが他方の受圧室8Bに供給される第2パイロット圧Pbよりも高くなって、図4に示す如く中立位置(I)から切換位置(II)に切換わる。これにより、油圧ポンプ2から吐出された圧油は、方向制御弁8を介してブームシリンダ12のロッド側に供給され、ボトム側からはタンク3へと圧油が排出される。この結果ブームシリンダ12はロッド縮小方向に駆動される。
For this reason, the
このように、電気レバー装置16を矢示A方向またはB方向に傾転操作することにより、コントローラ34は、電気レバー装置16からの電気信号に基づいた指令信号を電磁比例減圧弁27に出力できる。このときの指令信号は、電気レバー装置16の傾転操作(矢示A,B方向)により、電流値Icよりも大きくしたり、小さくしたりすることができる。このため、図7中に示す特性線36の如く、第1パイロット管路23Aに発生する第1パイロット圧Paを、第2パイロット管路23Bの第2パイロット圧Pb(減圧弁31の設定圧)よりも高くしたり、低くしたりすることができる。
Thus, by tilting the
即ち、図6に示す特性線35のように、方向制御弁8は、受圧室8A,8Bの圧力差(Pa−Pb)に応じて零の中立位置(I)から特性線部35A側の切換位置(II)または特性線部35B側の切換位置(III)に切換わる。この結果、方向制御弁8を電気レバー装置16の傾転操作に従って中立位置(I)から切換位置(II),(III)のいずれかに切換え制御でき、ブームシリンダ12を伸縮動作させるによって、前記ブームを上,下方向に俯仰動することができる。
That is, as indicated by the
また、電気レバー装置17を矢示A,B方向に傾転操作したときには、前述の場合と同様に、方向制御弁9を電気レバー装置17の傾転操作に従って中立位置(I)から切換位置(II),(III)のいずれかに切換え制御できる。これによって、アームシリンダ13を伸縮動作させることができ、前記アームを上,下方向に回動(俯仰動)することができる。
When the
また、電気レバー装置18または19を傾転操作したときには、前述の場合と同様に、方向制御弁10,11を電気レバー装置18,19の傾転操作に従って中立位置(I)から切換位置(II),(III)のいずれかに切換え制御できる。これにより、バケットシリンダ14(作業具シリンダ)または予備のシリンダ15を伸縮動作させることができ、前記バケット(作業具)または予備機器の作動を制御することができる。
When the
次に、図5中のステップ7では、油圧ショベルのオペレータがエンジン1を停止させたか否かを判定する。ステップ7で「NO」と判定する間は、エンジン1が稼働中であるので、ステップ5以降の処理を前述の如く繰返す。一方、ステップ7で「YES」と判定したときには、エンジン1の停止に伴ってコントローラ34による制御処理を終了させる。
Next, in
エンジン1の稼働を停止して油圧ショベル(作業車両)を停車させた場合、エンジン1の回転停止によりメインの油圧ポンプ2およびパイロットポンプ4の出力がなくなる。また、電磁比例減圧弁27〜30は、図1に示すように低圧位置(a)に自動復帰し、電磁切換弁33も初期位置(c)に自動復帰し、共通管路22Cはタンク3に接続される。
When the operation of the
このため、方向制御弁8〜11の受圧室8A〜11Aは、第1パイロット圧供給管路22Aおよび電磁比例減圧弁27〜30介してタンク3に接続される。受圧室8B〜11Bについても、第2パイロット圧供給管路22B、減圧弁31およびチェック弁32等を介してタンク3に接続される。この結果、方向制御弁8〜11は、一方の受圧室8A〜11Aと他方の受圧室8B〜11Bとの間の圧力差がなくなり、弱ばね(付勢ばね8C〜11C,8D〜11D)により中立位置(I)に保持される。
For this reason, the
かくして、本実施の形態によれば、電気レバー装置16〜19からの電気信号に従って方向制御弁8〜11の受圧室8A〜11Aと受圧室8B〜11Bとに供給するパイロット圧を制御するパイロット圧制御装置20を備えている。このパイロット圧制御装置20は、パイロット圧吐出管路21と、方向制御弁8〜11の一方の受圧室8A〜11Aとパイロット圧吐出管路21との間に設けられ当該一方の受圧室8A〜11Aに対してパイロットポンプ4からの圧油を第1パイロット圧Paとして供給するための第1パイロット圧供給管路22Aと、方向制御弁8〜11の他方の受圧室8B〜11Bとパイロット圧吐出管路21との間に設けられ当該他方の受圧室8B〜11Bに対してパイロットポンプ4からの圧油を第2パイロット圧Pbとして供給するための第2パイロット圧供給管路22Bとを含んでいる。
Thus, according to the present embodiment, the pilot pressure for controlling the pilot pressure supplied to the
さらに、前記パイロット圧制御装置20は、第1パイロット圧供給管路22Aに設けられパイロットポンプ21から第1パイロット圧供給管路22Aを介して一方の受圧室8A〜11Aに供給される第1パイロット圧Paを前記電気信号に応じた圧力に可変に制御する電磁比例減圧弁27〜30と、第2パイロット圧供給管路22Bに設けられパイロットポンプ21から第2パイロット圧供給管路22Bを介して他方の受圧室8B〜11Bに供給される第2パイロット圧Pbを所定の圧力に減圧する減圧弁31と、該減圧弁31と並列に第2パイロット圧供給管路22bに接続して設けられ他方の受圧室8B〜11Bから第2パイロット圧供給管路22Bに向けて圧油が流れるのを許容し逆向きの流れを遮断するチェック弁32と、パイロット圧吐出管路21と第1,第2パイロット圧供給管路22A,22Bとの間に設けられ第1,第2パイロット圧供給管路22A,22Bをパイロット圧吐出管路21とタンク3とのいずれか一方に選択的に接続するように切換えられる電磁切換弁33と、エンジン1の駆動情報と電気レバー装置16〜19からの電気信号に従って電磁比例減圧弁27〜30と電磁切換弁33とを制御するコントローラ34とを含んで構成されている。
Further, the pilot
即ち、本実施の形態によれば、パイロット圧制御装置20の第1パイロット圧供給管路22Aに設けられた電磁比例減圧弁27〜30を、1つの出力ポート27A〜30Aとポンプポート27P〜30Pとタンクポート27T〜30Tとを有する電磁比例制御弁により構成している。これにより、電磁比例減圧弁27〜30は、パイロット圧吐出管路21から第1パイロット圧供給管路22Aを介して一方の受圧室8A〜11Aに供給される第1パイロット圧Paを電気レバー装置16〜19からの電気信号に応じた圧力に可変に制御することができる。
That is, according to the present embodiment, the electromagnetic proportional
また、パイロット圧制御装置20の第2パイロット圧供給管路22Bに設けられた減圧弁31とチェック弁32とは、複数の方向制御弁8〜11に共通した第2パイロット圧Pbを供給する共通な単一の弁として設けられ、方向制御弁8〜11の他方の受圧室8B〜11Bには、第2パイロット圧供給管路22Bから減圧弁31を介して共通に減圧された圧油の圧力が第2パイロット圧Pbとして供給される。
Further, the
これにより、複数の油圧アクチュエータ(シリンダ12〜15)を作動、停止させる制御弁装置(多連弁装置)を複数の方向制御弁8〜11で構成する場合でも、複数の方向制御弁8〜11(スプール弁)に対して減圧弁31とチェック弁32とは、共通する単一の弁として構成することができ、減圧弁31とチェック弁32の個数を低減することができる。そして、方向制御弁8〜11の他方の受圧室8B〜11Bには、第2パイロット圧供給管路22Bから減圧弁31を介して共通に減圧された圧油の圧力を第2パイロット圧Pb(固定値)として供給することができる。
Thus, even when the control valve device (multiple valve device) for operating and stopping the plurality of hydraulic actuators (
従って、本実施の形態によれば、出力ポート27A〜30Aが1つの電磁比例減圧弁27〜30を用いるだけで、方向制御弁8〜11を中立位置(I)から切換位置(II),(III)の両方向に移動して制御することができる。これによって、油圧制御装置の構成を簡素化することができ、装置全体の小型、軽量化を図ることができる。
Therefore, according to the present embodiment, the
また、エンジン1の起動時においては、方向制御弁8〜11の両端側の受圧室8A〜11A,8B〜11Bに供給する第1,第2パイロット圧Pa,Pbに圧力差が生じるのを抑えることができる。このため、エンジン1の起動時に方向制御弁8〜11を中立位置(I)に安定して保持することができ、電気レバー装置16〜19の操作前に油圧アクチュエータ(シリンダ12〜15)が誤作動するのを防ぐことができる。これにより、油圧制御装置の信頼性、安全性を高めることができる。
Further, when the
特に、パイロット圧制御装置20のコントローラ34は、動力源であるエンジン1の起動を判定する判定手段(図5中のステップ2参照)を備え、この判定手段がエンジン1の起動と判断したときに、方向制御弁8〜11を中立位置(I)とする指令信号(電気信号)を電磁比例減圧弁27〜30に対して出力し、電磁切換弁33に対しては第1,第2パイロット圧供給管路22A,22Bをタンク3からパイロット圧吐出管路21側に切換えて接続する指令信号(電気信号)を出力する。
In particular, the
この場合、エンジン1の起動時において、コントローラ34から電磁切換弁33に出力する指令信号(特性線38)を、電磁比例減圧弁27〜30に出力する指令信号(特性線39)が電流値Icに到達してから時間差Δtだけ僅かに遅らせて出力することにより、方向制御弁8〜11の受圧室8A〜11A,8B〜11Bに供給する第1,第2パイロット圧Pa,Pbに圧力差が生じにくくなる。このため、エンジン1の起動時には方向制御弁8〜11を中立位置(I)に安定して保持することができ、油圧アクチュエータ(シリンダ12〜15)の誤作動を抑止することができる。
In this case, when the
なお、前記実施の形態では、電磁切換弁33を3ポート2位置の電磁式切換弁により構成する場合を例に挙げて説明した。しかし、本発明はこれに限るものではなく、例えば電磁比例減圧弁27〜30とほぼ同様な電磁比例制御弁を用いて電磁切換弁33を構成してもよい。このような電磁比例制御弁からなる電磁切換弁33は、指令信号の電流値が徐々に高くなるに応じて、初期位置(c)から作動位置(d)に徐々に切換わるので、パイロット圧吐出管路21からの圧油を共通管路22C(第1,第2パイロット圧供給管路22A,22B)に徐々に圧力を上げるように供給することができる。
In the above-described embodiment, the case where the
このため、方向制御弁8〜11の受圧室8A〜11Aには電磁比例減圧弁27〜30を介してパイロット圧吐出管路21からの圧力が徐々に加えられ、他方の受圧室8B〜11Bには、減圧弁31を介してパイロット圧吐出管路21からの圧力が徐々に加えられる。その結果、方向制御弁8〜11の受圧室8A〜11A,8B〜11B間には圧力差を生じにくくなり、エンジン1の起動時に方向制御弁8〜11を中立位置(I)に安定させて保持することができる。
For this reason, the pressure from the pilot
また、前記実施の形態では、方向制御弁8〜11の弁本体を構成する弁ハウジング内に、例えば受圧室8A〜11Aの近傍に位置して電磁比例減圧弁27〜30を設ける場合を例に挙げて説明した。しかし、本発明はこれに限るものではなく、例えば受圧室8A〜11Aから離間した別の位置に電磁比例減圧弁27〜30を設ける構成としてもよい。
Moreover, in the said embodiment, the case where the electromagnetic proportional pressure reducing valves 27-30 are provided in the valve housing which comprises the valve main body of the direction control valves 8-11 in the vicinity of the
一方、前記実施の形態では、電気式操作装置として電気レバー装置16〜19を用いる場合を例に挙げて説明した。しかし、本発明はこれに限るものではなく、例えば油圧ショベルのオペレータが足踏み操作する電気式操作ペダル等を用いて電気式操作装置を構成してもよい。 On the other hand, in the said embodiment, the case where the electric lever apparatus 16-19 was used as an electric operation apparatus was mentioned as an example, and was demonstrated. However, the present invention is not limited to this, and the electric operation device may be configured using, for example, an electric operation pedal that is operated by a hydraulic shovel operator.
さらに、前記実施の形態では、作業車両(建設機械)の代表例として油圧ショベルを例に挙げて説明した。しかし、本発明はこれに限ものではなく、油圧ポンプ、パイロットポンプ、油圧アクチュエータ、方向制御弁等を備えた各種の作業車両、例えば油圧クレーン、ダンプトラック、ホイールローダまたはブルドーザ等の種々の建設機械にも適用することができるものである。 Further, in the above embodiment, a hydraulic excavator has been described as a representative example of a work vehicle (construction machine). However, the present invention is not limited to this, and various construction vehicles such as a hydraulic crane, a dump truck, a wheel loader or a bulldozer equipped with a hydraulic pump, a pilot pump, a hydraulic actuator, a directional control valve, etc. It can also be applied to.
図1〜図4に示す複数の方向制御弁8〜11の配置(順番)は、図示の順番に限るものではなく、レイアウト設計等の必要に応じて変更可能である。また、ブームシリンダ12、アームシリンダ13、バケットシリンダ14および予備のシリンダ15は、あくまでも複数の油圧アクチュエータの一例として挙げたものであり、各油圧アクチュエータの配置、用途等は変更可能である。
The arrangement (order) of the plurality of
1 エンジン(動力源)
2 油圧ポンプ
3 タンク
4 パイロットポンプ
5 吐出管路
6 供給管路
7 センタバイパス管路
8〜11 方向制御弁
8A〜11A 一方の受圧室
8B〜11B 他方の受圧室
12 ブームシリンダ(油圧アクチュエータ)
13 アームシリンダ(油圧アクチュエータ)
14 バケットシリンダ(油圧アクチュエータ)
15 予備のシリンダ(油圧アクチュエータ)
16〜19 電気レバー装置(電気式操作装置)
20 パイロット圧制御装置
21 パイロット圧吐出管路
22A 第1パイロット圧供給管路
22B 第2パイロット圧供給管路
22C 共通管路
23A〜26A 第1パイロット管路
23B〜26B 第2パイロット管路
27〜30 電磁比例減圧弁
27A〜30A 出力ポート
27P〜30P ポンプポート
27T〜30T タンクポート
31 減圧弁
32 チェック弁
33 電磁切換弁
34 コントローラ
1 Engine (Power source)
2
13 Arm cylinder (hydraulic actuator)
14 Bucket cylinder (hydraulic actuator)
15 Spare cylinder (hydraulic actuator)
16-19 Electric lever device (electric operation device)
20 pilot
Claims (3)
前記作業車両に設けられ、前記油圧ポンプから供給される圧油により駆動される油圧アクチュエータと、
前記油圧ポンプと前記油圧アクチュエータとの間に設けられ、前記パイロットポンプからのパイロット圧が一対の受圧室に供給されることにより前記油圧アクチュエータへの圧油の供給,排出を制御する方向制御弁と、
前記方向制御弁を切換え操作して前記油圧アクチュエータの作動,停止を制御するため外部からの操作に従って電気信号を出力する電気式操作装置と、
前記電気式操作装置からの前記電気信号に従って前記方向制御弁の各受圧室に供給するパイロット圧を可変に制御するパイロット圧制御装置と、
を備えた作業車両用油圧制御装置において、
前記パイロット圧制御装置は、
前記パイロットポンプの吐出側に設けられたパイロット圧吐出管路と、
前記方向制御弁の各受圧室のうち一方の受圧室と前記パイロット圧吐出管路との間に設けられ、前記一方の受圧室に対して前記パイロットポンプからの圧油を第1パイロット圧として供給するための第1パイロット圧供給管路と、
前記方向制御弁の各受圧室のうち他方の受圧室と前記パイロット圧吐出管路との間に設けられ、前記他方の受圧室に対して前記パイロットポンプからの圧油を第2パイロット圧として供給するための第2パイロット圧供給管路と、
前記第1パイロット圧供給管路に設けられ、前記パイロットポンプから前記第1パイロット圧供給管路を介して前記方向制御弁の一方の受圧室に供給される前記第1パイロット圧を前記電気信号に応じた圧力に制御する電磁比例減圧弁と、
前記第2パイロット圧供給管路に設けられ、前記パイロットポンプから前記第2パイロット圧供給管路を介して前記方向制御弁の他方の受圧室に供給される前記第2パイロット圧を所定の圧力に減圧する減圧弁と、
該減圧弁と並列に前記第2パイロット圧供給管路に接続して設けられ、前記他方の受圧室から前記第2パイロット圧供給管路に向けて圧油が流れるのを許容し逆向きの流れを遮断するチェック弁と、
前記パイロット圧吐出管路に設けられ、前記第1,第2パイロット圧供給管路を前記パイロット圧吐出管路とタンクとのいずれか一方に選択的に接続するように切換えられる電磁切換弁と、
前記動力源の駆動情報と前記電気式操作装置からの電気信号に従って前記電磁比例減圧弁と前記電磁切換弁とを制御するコントローラと、
を含んで構成され、
前記コントローラは、前記動力源の起動を判定する判定手段を備え、該判定手段が前記動力源の起動と判断したときに、前記方向制御弁を中立位置とするように前記電磁比例減圧弁を制御し、前記電磁切換弁を、前記第1,第2パイロット圧供給管路を前記タンクから前記パイロット圧吐出管路側に切換えて接続するように制御することを特徴とした作業車両用油圧制御装置。 A main hydraulic pump and a pilot pump driven by a power source of the work vehicle;
A hydraulic actuator provided in the work vehicle and driven by pressure oil supplied from the hydraulic pump;
A directional control valve that is provided between the hydraulic pump and the hydraulic actuator, and that controls supply and discharge of pressure oil to the hydraulic actuator by supplying pilot pressure from the pilot pump to a pair of pressure receiving chambers; ,
An electric operation device that outputs an electric signal in accordance with an operation from the outside in order to control the operation and stop of the hydraulic actuator by switching the direction control valve;
A pilot pressure control device that variably controls a pilot pressure supplied to each pressure receiving chamber of the directional control valve in accordance with the electrical signal from the electric operation device;
Oite the working hydraulic control system for a vehicle having a,
The pilot pressure control device
A pilot pressure discharge line provided on the discharge side of the pilot pump;
One of the pressure receiving chambers of the directional control valve is provided between one pressure receiving chamber and the pilot pressure discharge pipe, and pressure oil from the pilot pump is supplied as a first pilot pressure to the one pressure receiving chamber. A first pilot pressure supply line for
Among the pressure receiving chambers of the directional control valve, provided between the other pressure receiving chamber and the pilot pressure discharge pipe, pressure oil from the pilot pump is supplied to the other pressure receiving chamber as a second pilot pressure. A second pilot pressure supply line for
The first pilot pressure that is provided in the first pilot pressure supply line and is supplied from the pilot pump to the one pressure receiving chamber of the directional control valve via the first pilot pressure supply line is used as the electric signal. An electromagnetic proportional pressure reducing valve that controls the pressure according to
The second pilot pressure provided in the second pilot pressure supply line and supplied from the pilot pump to the other pressure receiving chamber of the directional control valve via the second pilot pressure supply line is set to a predetermined pressure. A pressure reducing valve for reducing pressure;
A flow that is provided in parallel with the pressure reducing valve and connected to the second pilot pressure supply line and allows the pressure oil to flow from the other pressure receiving chamber toward the second pilot pressure supply line. A check valve to shut off,
An electromagnetic switching valve provided in the pilot pressure discharge line and switched to selectively connect the first and second pilot pressure supply lines to one of the pilot pressure discharge line and the tank;
A controller that controls the electromagnetic proportional pressure reducing valve and the electromagnetic switching valve according to drive information of the power source and an electric signal from the electric operation device;
Is configured to include a,
The controller includes a determination unit that determines activation of the power source, and controls the electromagnetic proportional pressure reducing valve so that the direction control valve is set to a neutral position when the determination unit determines that the power source is activated. and the electromagnetic switching valve, said first, second pilot pressure supply conduit to the pilot圧吐extraction tube roadside in switching the control to a work vehicle hydraulic control apparatus characterized by Rukoto to connect from the tank .
前記減圧弁と前記チェック弁とは、前記複数の方向制御弁に対して共通する単一の弁としてそれぞれ設けられ、
前記各方向制御弁のそれぞれの受圧室のうち前記他方の受圧室には、前記第2パイロット圧供給管路から前記減圧弁を介して共通に減圧された圧油の圧力が前記第2パイロット圧として供給されることを特徴とする請求項1に記載の作業車両用油圧制御装置。 Each of the hydraulic actuator, the directional control valve, and the electromagnetic proportional pressure reducing valve is provided in plurality.
The pressure reducing valve and the check valve are each provided as a single valve common to the plurality of directional control valves,
Among the pressure receiving chambers of the directional control valves, the other pressure receiving chamber receives the pressure of the pressure oil commonly reduced from the second pilot pressure supply line through the pressure reducing valve. The hydraulic control device for a work vehicle according to claim 1, wherein the hydraulic control device is supplied as
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016191356A JP6618445B2 (en) | 2016-09-29 | 2016-09-29 | Hydraulic control device for work vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016191356A JP6618445B2 (en) | 2016-09-29 | 2016-09-29 | Hydraulic control device for work vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018054031A JP2018054031A (en) | 2018-04-05 |
| JP6618445B2 true JP6618445B2 (en) | 2019-12-11 |
Family
ID=61835544
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016191356A Active JP6618445B2 (en) | 2016-09-29 | 2016-09-29 | Hydraulic control device for work vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6618445B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7002351B2 (en) * | 2018-01-25 | 2022-01-20 | 川崎重工業株式会社 | Hydraulic system |
| CN110397109A (en) * | 2019-07-29 | 2019-11-01 | 上海三一重机股份有限公司 | Method of controlling security, device, system and the excavator of complete automatically controlled excavator |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3016004B2 (en) * | 1995-10-23 | 2000-03-06 | 内田油圧機器工業株式会社 | Work machine interference prevention control circuit device |
| JP2006308073A (en) * | 2005-03-30 | 2006-11-09 | Hitachi Constr Mach Co Ltd | Hydraulic drive system for construction machine |
| DE102006007935A1 (en) * | 2006-02-21 | 2007-10-25 | Liebherr France Sas | Control device and hydraulic pilot control |
-
2016
- 2016-09-29 JP JP2016191356A patent/JP6618445B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018054031A (en) | 2018-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3106677B1 (en) | Hydraulic drive appraratus for construction machine | |
| EP3305994B1 (en) | Control system for construction machinery and control method for construction machinery | |
| JP6467515B2 (en) | Construction machinery | |
| EP2514881A1 (en) | Hydraulic driving device for working machine | |
| JP5771332B2 (en) | Hydraulic control system for construction machinery | |
| JP2006097899A (en) | Electronically operated and hydraulically operated drain valve | |
| JP6914206B2 (en) | Hydraulic circuit | |
| EP3859168B1 (en) | Fluid circuit | |
| US20110088785A1 (en) | Safety feature for stuck valve | |
| WO2019220954A1 (en) | Hydraulic shovel drive system | |
| EP3492662B1 (en) | System and method for controlling a construction machine | |
| CN109563695B (en) | Control valve for excavator and excavator | |
| JP2003004003A (en) | Hydraulic control circuit of hydraulic shovel | |
| JP6618445B2 (en) | Hydraulic control device for work vehicle | |
| JP7210553B2 (en) | hydraulic circuit | |
| JP6257879B2 (en) | Excavator | |
| EP3587674B1 (en) | System for controlling construction machine and method for controlling construction machine | |
| US20200340211A1 (en) | Pivoting work machine | |
| WO2015040800A1 (en) | Fluid-pressure drive device | |
| JP2010242774A (en) | Cylinder control device and working machine | |
| JPH0941427A (en) | Hydraulic working machine | |
| JP2007120004A (en) | Hydraulic control device of work machine | |
| JP2005140153A (en) | Hydraulic control device for construction machine | |
| WO2023162884A1 (en) | Fluid pressure circuit | |
| JP2014190514A (en) | Pump control device for construction machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180628 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20180628 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190423 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191029 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191112 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6618445 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |