JP6413111B2 - Magnetic detection device - Google Patents
Magnetic detection device Download PDFInfo
- Publication number
- JP6413111B2 JP6413111B2 JP2013193458A JP2013193458A JP6413111B2 JP 6413111 B2 JP6413111 B2 JP 6413111B2 JP 2013193458 A JP2013193458 A JP 2013193458A JP 2013193458 A JP2013193458 A JP 2013193458A JP 6413111 B2 JP6413111 B2 JP 6413111B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- sensor
- sensors
- magnetic body
- gradio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 177
- 230000008878 coupling Effects 0.000 claims description 59
- 238000010168 coupling process Methods 0.000 claims description 59
- 238000005859 coupling reaction Methods 0.000 claims description 59
- 239000000696 magnetic material Substances 0.000 claims description 26
- 230000008859 change Effects 0.000 claims description 22
- 239000000126 substance Substances 0.000 claims description 14
- 230000035699 permeability Effects 0.000 claims description 7
- 238000010586 diagram Methods 0.000 description 13
- 239000002184 metal Substances 0.000 description 9
- 229910052751 metal Inorganic materials 0.000 description 9
- 238000000034 method Methods 0.000 description 7
- 239000004020 conductor Substances 0.000 description 6
- 230000004907 flux Effects 0.000 description 6
- 230000003321 amplification Effects 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 238000004088 simulation Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000013598 vector Substances 0.000 description 1
Images














Landscapes
- Geophysics And Detection Of Objects (AREA)
- Measuring Magnetic Variables (AREA)
Description
本発明は、磁性体の存在を検出するための磁性体検出装置に関するものであり、特に磁気センサとして一対または複数対の磁気センサを用いるものに関する。 The present invention relates to a magnetic body detection device for detecting the presence of a magnetic body, and more particularly to one using a pair of or multiple pairs of magnetic sensors as magnetic sensors.
磁性体を検出するための磁性体検出装置が広く用いられている。この磁性体検出装置は具体的には例えば、金属探知機として、例えば特許文献1などに記載されている。特許文献1には、1つの磁気発生源と磁気センサとして一対の検出コイルとを備え、1つの磁気発生源が発生する交番磁界、および、該金属探知機の近傍に金属などの検出対象物が存在する場合にはその交番磁界による金属の電磁的反応とを前記一対の検出コイルのそれぞれにより受信し、両者の出力を比較することにより前記検出対象物の存在の有無を検出するものである。 2. Description of the Related Art Magnetic body detection devices for detecting a magnetic body are widely used. Specifically, this magnetic substance detection device is described, for example, in Patent Document 1 as a metal detector. Patent Document 1 includes one magnetic generation source and a pair of detection coils as a magnetic sensor, and an alternating magnetic field generated by one magnetic generation source and a detection object such as a metal in the vicinity of the metal detector. If present, the electromagnetic response of the metal by the alternating magnetic field is received by each of the pair of detection coils, and the presence or absence of the detection object is detected by comparing the outputs of both.
特許文献1に記載のような金属探知機の手法においては、磁気センサを構成する一対の検出コイルの出力を比較することにより検出対象物の存在を検出することから、前記一対の検出コイルの磁気検出における分解能が金属探知機の検知能力を左右することとなる。そのため、特許文献1においては、金属を含む被検査体(検出対象物)が一方の検出コイルを通過し出力信号が立ち上がった場合、タイマにより被検査体が一対の検出コイル間を移動する時間だけ経過した後にマルチバイブレータがパルスを発する構成を有し、該パルスと前記被検査体が他方の検出コイルを通過することによるその出力信号とをAND回路で処理することにより、より低いしきい値により金属検出を行う発明が開示されている。 In the technique of the metal detector as described in Patent Document 1, since the presence of the detection target is detected by comparing the outputs of the pair of detection coils constituting the magnetic sensor, the magnetism of the pair of detection coils is detected. The resolution in detection affects the detection ability of the metal detector. Therefore, in Patent Document 1, when an object to be inspected (detection target) including a metal passes through one detection coil and an output signal rises, only the time required for the object to be inspected to move between the pair of detection coils by a timer. After the elapse of time, the multivibrator emits a pulse, and the pulse and the output signal of the inspected object passing through the other detection coil are processed by an AND circuit, thereby lowering the threshold value. An invention for performing metal detection is disclosed.
一方、特許文献2は、ゲート型の磁性体検出システムを開示している。具体的には特許文献2においては、高感度な磁気インピーダンスセンサ(MIセンサ)を用いた磁性体検出装置が開示されている。これは、磁性体が自然着磁されていることを前提に、その磁性体が持ち運ばれるなどして移動することに伴う磁場の変動を前記磁気インピーダンスセンサにより検出することにより、磁性体がそのゲートを通過したことを検出するものである。特許文献2に開示に技術においては、所望の信号、すなわち磁性体を所持する人が通過したことに伴う磁場変動信号が所望の大きさ以上になるように、磁気インピーダンスセンサからの信号から地球磁場などの周囲磁場成分を除去するために、帯域通過濾波器が設けられている。 On the other hand, Patent Document 2 discloses a gate-type magnetic substance detection system. Specifically, Patent Document 2 discloses a magnetic body detection device using a highly sensitive magnetic impedance sensor (MI sensor). This is based on the premise that the magnetic body is naturally magnetized, and the magnetic body detects the fluctuation of the magnetic field that accompanies the movement of the magnetic body by being carried, for example. It detects that it has passed through the gate. In the technique disclosed in Patent Document 2, a desired signal, that is, a magnetic field fluctuation signal associated with the passage of a person who has a magnetic material passes a desired magnitude or more from the signal from the magnetic impedance sensor. In order to remove ambient magnetic field components such as, a band-pass filter is provided.
しかしながら、特許文献1の金属探知機は、例えばベルトコンベヤで被検査体が移動させられるなど、一対の検出コイル間を被検査体が一定速度で移動することが前提となっており、それ以外の場合に応用することは困難が生ずる。また、特許文献2の磁性体検出システムにおいては、予め定められた周波数成分以外の成分を除去できず、周囲磁場成分を十分に除去できない場合が想定される。検出すべき磁性体からの信号と同じ周波数帯域で周囲磁場成分が変動する場合は、磁性体からの信号の大きさが周囲磁場成分の変動に対して十分に大きい必要があるため、微小な磁性体の検出が困難である。 However, the metal detector of Patent Document 1 is based on the assumption that the object to be inspected moves at a constant speed between a pair of detection coils, for example, the object to be inspected is moved by a belt conveyor. Difficult to apply in some cases. Moreover, in the magnetic body detection system of patent document 2, the case where components other than a predetermined frequency component cannot be removed and an ambient magnetic field component cannot be removed sufficiently is assumed. When the ambient magnetic field component fluctuates in the same frequency band as the signal from the magnetic material to be detected, the magnitude of the signal from the magnetic material must be sufficiently large with respect to the fluctuation of the ambient magnetic field component. The body is difficult to detect.
本発明は以上の事情を背景として為されたもので、その目的とするところは、周囲磁場成分の影響をより低減することにより精度のよい検出が可能な磁性体検出装置を提供することにある。 The present invention has been made against the background of the above circumstances, and an object of the present invention is to provide a magnetic substance detection device capable of performing accurate detection by further reducing the influence of surrounding magnetic field components. .
かかる目的を達成するための第1の発明は、(a)複数の磁気結合型グラジオセンサを含んで構成される磁性体検出装置であって、(b)該磁気結合型グラジオセンサのそれぞれは、一対の磁気センサと、該一対の磁気センサを磁気的に結合する比透磁率が100以上の結合部材とを含んで長手状に構成され、(c)前記磁気結合型グラジオセンサのそれぞれは、長手方向の向きが直線上になるように配置され、(d)該磁性体検出装置は、前記磁気結合型グラジオセンサのそれぞれの長手方向において該磁気結合型グラジオセンサのそれぞれの両端から該長手方向かつ該磁気結合型グラジオセンサのそれぞれの中心から離れる向きにそれぞれ150mm以内、および、前記磁気結合型グラジオセンサのそれぞれの径方向において、前記一対の磁気センサの間隔Lとした場合において前記磁気結合型グラジオセンサのそれぞれを中心とした半径3L以内の範囲を検出範囲とし、(e)該検出範囲における検出対象の有無を検出すること、を特徴とする。
A first invention for achieving such an object is (a) a magnetic body detection device including a plurality of magnetically coupled gradiosensors, wherein (b) each of the magnetically coupled gradiosensors is: a pair of magnetic sensors, relative permeability which the pair of the magnetic sensor magnetically coupled is composed of 100 or more binding members in a longitudinal shape Nde contains, each of (c) the magnetic coupling gradiometer sensors, longitudinal (D) the magnetic body detection device is arranged in the longitudinal direction from the both ends of the magnetic coupling type gradio sensor in the longitudinal direction of the magnetic coupling type gradio sensor ; within each direction 150mm away from the respective centers of the magnetic coupling gradiometer sensors, and, in each of the radial direction of the magnetic coupling gradiometer sensors, the pair In case of the distance L of the magnetic sensor as a detection range the range within a radius 3L centered on each of the magnetic coupling gradiometer sensor, and wherein, to detect the presence or absence of a detection target range the detectable (e) To do.
第1の発明に係る磁性体検出装置によれば、複数の磁気結合型グラジオセンサを含んで構成され、該磁気結合型グラジオセンサのそれぞれは、一対の磁気センサと、該一対の磁気センサを磁気的に結合する比透磁率が100以上の結合部材とを含んで長手状に構成され、前記磁気結合型グラジオセンサのそれぞれは、長手方向の向きが直線上になるように配置され、該磁性体検出装置は、前記磁気結合型グラジオセンサのそれぞれの長手方向において該磁気結合型グラジオセンサのそれぞれの両端から該長手方向かつ該磁気結合型グラジオセンサのそれぞれの中心から離れる向きにそれぞれ150mm以内、および、前記磁気結合型グラジオセンサのそれぞれの径方向において、前記一対の磁気センサの間隔Lとした場合において前記磁気結合型グラジオセンサのそれぞれを中心とした半径3L以内の範囲を検出範囲として、前記磁気結合型グラジオセンサにおける信号レベル比を考慮して該検出範囲における検出対象の有無を判断することができるとともに、前記複数の磁気結合型グラジオセンサを用いることで、それらの検出範囲を効率的に補完され、磁性体検出装置における検出範囲を広げることができる。
According to the magnetic detection device according to the first invention, the magnetic is structured to include a plurality of magnetic coupling gradiometer sensors, each of the magnetic coupling gradiometer sensor, a pair of magnetic sensors, the pair of magnetic sensors to be configured and a coupling member relative magnetic permeability is 100 or more that bind to elongated Nde including, each of the magnetic coupling gradiometer sensors, the longitudinal orientation is arranged to be on a straight line, said magnetic body detector means within each respective 150mm from both ends in a direction away from the longitudinal and the respective centers of the magnetic coupling gradiometer sensor of the magnetic coupling gradiometer sensor in the longitudinal direction of the magnetic coupling gradiometer sensor, and , in each of the radial direction of the magnetic coupling gradiometer sensors, the magnetic binding in case of the distance L of the pair of magnetic sensors As the detection range of the range within a radius 3L around the respective mold grayed radio sensors, it is possible to determine the presence or absence of the detection target in range said detectable considering the signal level ratio of the magnetic coupling gradiometer sensors, the by using a plurality of magnetic coupling gradiometer sensors, it is complemented their detection range efficiently, it is possible to widen the detection range in the magnetic body detection device.
好適には、前記磁性体検出装置において、前記磁気結合型グラジオセンサは、地磁気の垂直方向の磁界成分の変化を検出するように設けられた磁気結合型グラジオセンサを少なくとも1つ含むこと、を特徴とする。このようにすれば、前記磁気結合型グラジオセンサにおける結合部材に地磁気の垂直方向の磁束成分が流れ、前記一対の磁気センサにより該地磁気の垂直方向の磁束成分の変化が検出されるので、磁性体検出のための磁気形成コイルのような磁場発生源を必要としない構成が可能となる。 Preferably, in the magnetic substance detection device, the magnetic coupling type gradio sensor includes at least one magnetic coupling type gradio sensor provided to detect a change in a magnetic field component in a vertical direction of geomagnetism. And By doing so, the magnetic flux component in the vertical direction of geomagnetism flows through the coupling member in the magnetically coupled gradio sensor, and the change in the magnetic flux component in the vertical direction of the geomagnetism is detected by the pair of magnetic sensors. A configuration that does not require a magnetic field generation source such as a magnetic forming coil for detection is possible.
好適には、前記磁性体検出装置において、前記磁気結合型グラジオセンサは、地磁気の水平方向の磁界成分の変化を検出するように設けられた磁気結合型グラジオセンサを少なくとも1つ含むこと、を特徴とする。このようにすれば、前記磁気結合型グラジオセンサにおける結合部材に地磁気の水平方向の磁束成分が流れ、前記一対の磁気センサにより該地磁気の垂直方向の水平成分の変化が検出されるので、磁性体検出のための磁場発生源を必要としない構成が可能となる。 Preferably, in the magnetic substance detection device, the magnetic coupling type gradio sensor includes at least one magnetic coupling type gradio sensor provided to detect a change in a horizontal magnetic field component of geomagnetism. And By doing so, the magnetic flux component in the horizontal direction of geomagnetism flows through the coupling member in the magnetic coupling type gradio sensor, and the change in the horizontal component in the vertical direction of the geomagnetism is detected by the pair of magnetic sensors. A configuration that does not require a magnetic field generation source for detection is possible.
好適には、前記磁性体検出装置は、前記磁気結合型グラジオセンサを複数有し、該複数の磁気結合型グラジオセンサの出力信号に基づいて磁性体を検出する磁性体判別部を有することを特徴とする。このようにすれば、前記磁気結合型グラジオセンサが複数設けられるので、磁性体検出装置が磁性体を検出することのできる検出対象範囲を大きくすることができる。 Preferably, the magnetic body detection device includes a plurality of magnetic coupling type gradio sensors, and includes a magnetic body determination unit that detects a magnetic body based on output signals of the plurality of magnetic coupling type gradio sensors. And In this way, since a plurality of the magnetic coupling type gradio sensors are provided, the detection target range in which the magnetic body detection device can detect the magnetic body can be increased.
また、好適には、前記磁性体検出装置は、前記磁気結合型グラジオセンサを複数有し、前記磁性体判別部は、該複数の磁気結合型グラジオセンサの出力信号に基づいて、磁性体の位置および該磁性体の磁力の強さ、磁性体の大きさの少なくとも1つを推定することを特徴とする。このようにすれば、複数の磁気結合型グラジオセンサの出力信号に基づいて磁性体の有無のみならずその位置、磁気の強さ、あるいは、磁性体の大きさについての情報が得られる。 Preferably, the magnetic body detection device includes a plurality of the magnetically coupled gradiosensors, and the magnetic body discriminating unit determines the position of the magnetic body based on output signals of the plurality of magnetically coupled gradiosensors. And estimating at least one of the strength of the magnetic force of the magnetic body and the size of the magnetic body. In this way, information on not only the presence / absence of the magnetic material but also its position, magnetic strength, or size of the magnetic material can be obtained based on the output signals of the plurality of magnetically coupled gradio sensors.
以下、本発明の一実施例について、図面を参照しつつ詳細に説明する。 Hereinafter, an embodiment of the present invention will be described in detail with reference to the drawings.
図1は、本発明の一実施例である磁性体検出装置10の構成の概要を説明する図である。図1に示すように、磁性体検出装置10は磁界を検出するためのセンサ部11と、そのセンサ部11を駆動するための電流を供給するとともにセンサ部11から出力される電気信号を処理するための回路部21とを有して構成されている。このうちセンサ部11は、一対の磁気センサである第1センサ12aおよび第2センサ12b(以下、これらを区別しない場合には「磁気センサ12」という。)を含んで構成される。
FIG. 1 is a diagram for explaining the outline of the configuration of a magnetic body detection device 10 according to an embodiment of the present invention. As shown in FIG. 1, the magnetic body detection device 10 supplies a
地磁気などの外部磁界は、第1センサ12aおよび第2センサ12bの両者において共通して検出される。この外部磁界は磁性体50の通過以外によって生ずる磁界である。一方、磁性体50の通過によって生ずる磁界は、その位置に応じて第1センサ12aおよび第2センサ12bのそれぞれにおいて異なる大きさとなって検出される。なお、後述するように、一対の磁気センサ12aおよび12bの出力は差動させられるので、両センサ12aおよび12bの出力の差において検出可能な程度であることが望ましい。
An external magnetic field such as geomagnetism is detected in common in both the
本実施例においては、これら磁気センサ12は磁気インピーダンスセンサ(MIセンサ)であり、それぞれ、感磁部の磁束変化を検出する検出コイル13(後述する検出コイル13aと13bとを区別しない場合、「検出コイル13」という。)と、後述する結合部材としてのアモルファスワイヤ14を含んで構成されている。なお、検出コイル13aおよび13bはそれぞれ磁気センサ12aおよび12bに対応する。検出コイル13はそれぞれ、中空のコイル状に設けられており、コイルの両端の電圧を後述する電気回路を用いて検出することができるようにされており、本実施例においてはその一方が接地されている。これら第1センサ12aに設けられた検出コイル13aと第2センサ12bに設けられた検出コイル13bとは同一形状で、例えば、線径60μm、内径0.2mm、巻数500、長さ10mmのコイルである。このように本実施例のセンサ部11は、2つのセンサ12aおよび12bが結合部材14によって磁気的に直列に結合され、また、後述するように、第1センサ12aおよび第2センサ12bの出力は差動させられるので、本実施例のセンサ部11は磁界強度の勾配を計測することが可能な磁気結合型グラジオセンサである。
In the present embodiment, these magnetic sensors 12 are magnetic impedance sensors (MI sensors), and each of the detection coils 13 (
センサ部11は後述する回路部21に接続されており、その回路部21において検出コイル13の両端の電位差が検出可能とされている。具体的には、第1センサ12aに設けられた検出コイル13aの両端の電位差vout_aおよび第2センサ12bに設けられた検出コイル13bの両端の電位差vout_bが検出可能とされている。また、後述するようにセンサ部11を駆動するための電流は回路部21から供給されるようになっている。
The
また、検出コイル13の中空部分には、アモルファスワイヤ14が通されている。本実施例においては、図1に示す様にアモルファスワイヤ14は長手方向に延びる棒状の形状を有しており、一本のアモルファスワイヤ14が検出コイル13aの中空部分と検出コイル13bの中空部分とを通る(貫く)様に配設されている。すなわち、本実施例のアモルファスワイヤ14は、両磁気センサ12を磁気回路上で結合する結合部材としても機能している。
An amorphous wire 14 is passed through the hollow portion of the detection coil 13. In the present embodiment, as shown in FIG. 1, the amorphous wire 14 has a rod-like shape extending in the longitudinal direction, and one amorphous wire 14 includes a hollow portion of the detection coil 13a and a hollow portion of the
かかる構成によれば、結合部材としてのアモルファスワイヤ14における外部磁界は、そのアモルファスワイヤ14の長手方向に関して対称に分布することが発明者らの知見により分かっている。そのため、一対のセンサ12a、12bに対応する検出コイル13a、13bをそれぞれアモルファスワイヤ14の長手方向に対して対称な位置に設けることにより、検出コイル13a、13bはそれぞれアモルファスワイヤ14における磁界、すなわち、両者に共通して印可される外部磁界を等しい値として検出することができる。
According to such a configuration, the inventors know that the external magnetic field in the amorphous wire 14 serving as the coupling member is distributed symmetrically with respect to the longitudinal direction of the amorphous wire 14. Therefore, by providing the detection coils 13a and 13b corresponding to the pair of
なお、本実施例においては、結合部材としてアモルファスワイヤ14が用いられているが、結合部材が両磁気センサ12を磁気的に直列に結合するためには、結合部材としては、比透磁率が100以上の磁性材料、感磁部を構成する材料の比透磁率の1/100以上の比透磁率を有する磁性材料、又は感磁部と同一の磁性材料により構成されることが望ましい。 In this embodiment, the amorphous wire 14 is used as the coupling member. However, in order for the coupling member to magnetically couple both magnetic sensors 12 in series, the coupling member has a relative permeability of 100. It is desirable that the magnetic material is made of the same magnetic material as the magnetic material having the relative magnetic permeability of 1/100 or more of the relative magnetic permeability of the material constituting the magnetic sensitive part.
アモルファスワイヤ14の両端には、そのアモルファスワイヤ14に電流iinを印加することができるように配線が設けられている。図1の例においては、アモルファスワイヤ14の一端に後述する発振器22からの電流iinが印加されるようになっており、他端は接地されている。この電流iinは前述の通り回路部21から供給される。すなわち、本実施例においてアモルファスワイヤ14のうち、磁気センサ12の検出コイル13内に位置する部分は感磁部として機能している。
Wiring is provided at both ends of the amorphous wire 14 so that a current i in can be applied to the amorphous wire 14. In the example of FIG. 1, a current i in from an
また本実施例においては、アモルファスワイヤ14のうち、両検出コイル13によって挟まれる内側において、電気伝導体からなる並列伝導体18が、アモルファスワイヤ14と電気的に並列になる様に接続されている。このようにすれば、その並列伝導体18を含むアモルファスワイヤ14の両端の抵抗が、アモルファスワイヤ14単体の場合よりも、すなわち並列伝導体18がない場合よりも減少することからより多くの電流を流すことができる。すなわち、本実施例のように、磁気センサ12として磁気インピーダンスセンサが用いられる場合、アモルファスワイヤ14により大電流を流すことができれば、磁気センサ12の分解能(検出性能)の向上が可能となる。具体的には例えば、前記並列伝導体18としては、線径0.7mm、長さ45mmの銅線が用いられる。ここで、並列伝導体18は非磁性であるので、磁気センサ12による検出に影響を与えない。
In the present embodiment, the
図2は、図1に示す本実施例の磁性体検出装置10のうち、センサ部11と、回路部21の構成の一部であってセンサ部11との入出力を行なう部分とを説明する図である。回路部21は、前記センサ部11を駆動するための電気信号iinを入力するとともに、センサ部11からの出力信号Vout_a、Vout_bを処理し、センサ部11において検出された磁界強度に関する情報を算出する。また、本実施例においては、回路部21には、回路部において処理された電気的信号に基づいて検出対象物50の検出制御を行う制御装置(制御部)90が接続されている。
FIG. 2 illustrates the
図2に示す回路部21のうち、発振器22からは、アモルファスワイヤ14に通電される電流iinなどの元となるパルス信号、すなわち矩形波が生成される。この矩形波は、アンプ24によって所定の増幅が行なわれ、アモルファスワイヤ14に印加される。本実施例においては例えば、パルス信号の振幅が2〜3Vとなるように増幅が行なわれる。アモルファスワイヤに印可されるパルス信号の繰り返し周波数は、予め実験的に得られた繰り返し周波数とセンサの感度との関係に基づき、センサの感度が良好となる繰り返し周波数が例えば10kHzのように選択される。パルス幅は、磁気インピーダンスセンサが高感度化するように、予め実験的にあるいはシミュレーションにより得られた値とされる。具体的には例えば、アモルファスワイヤ14のインピーダンス変化が最も顕著な周波数が10MHzである場合には、パルス幅が50nsとなり、デューティー比は0.0005となる。
In the
サンプルホールド回路26、30はそれぞれ、検出コイル13a、13bの両端電位差、すなわち両端における電圧の差(起電力)が入力される。このサンプルホールド回路26、30においては、アモルファスワイヤ14に印加するパルス信号の立ち上がり(通電開始)によりコイルに発生する誘導電圧について、その立ち上がりからピークを含む時間範囲において積分して出力を行なう。具体的には例えば前記時間範囲は10ns〜50nsのように設定される。このため、サンプルホールド回路26、30には前述の発振器22によって出力されるパルス信号が入力されており、サンプルホールド回路26、30はこのパルス信号の立ち上がりをスイッチとして作動を行なう。また、バッファアンプ28、32はそれぞれ、サンプルホールド回路26、30の出力を差動アンプ34へ流す。
The sample hold
なお、検出コイル13においては、アモルファスワイヤ14に印加されるパルス信号における立ち上がり(通電開始)によって検出コイル13に発生する誘導電圧の波形と、パルス信号における立ち下がり(通電遮断)によって検出コイル13に発生する誘導電圧との変動とが連続して発生するよう、すなわち、パルス信号における立ち上がり(通電開始)によって検出コイル13に発生する誘導電圧の波形とパルス信号における立ち下がり(通電遮断)によって検出コイル13に発生する誘導電圧との波形との間に誘導電圧が例えば0に留まる時間がないようにされている。前述の検出コイル13の形状として例示した、線径60μm、内径0.2mm、巻数500、長さ10mmのコイルは、本実施例においてこの条件を満たすものである。 In the detection coil 13, the waveform of the induced voltage generated in the detection coil 13 due to the rise (start of energization) in the pulse signal applied to the amorphous wire 14 and the detection coil 13 due to the fall (energization interruption) in the pulse signal. The detection coil is caused to continuously generate fluctuations with the induced voltage generated, that is, due to the waveform of the induced voltage generated in the detection coil 13 by the rise (start of energization) in the pulse signal and the fall (energization interruption) in the pulse signal. There is no time for the induced voltage to remain at 0, for example, between the waveform of the induced voltage generated at 13 and the waveform. A coil having a wire diameter of 60 μm, an inner diameter of 0.2 mm, a winding number of 500, and a length of 10 mm exemplified as the shape of the above-described detection coil 13 satisfies this condition in this embodiment.
図2に戻って、差動アンプ34は、これらバッファアンプ28、32を介して出力されたサンプルホールド回路26、30のそれぞれの出力の差分を増幅してvoutとして出力する。具体的には、第1センサ12aの検出コイル13aに関連するバッファアンプ28を介したサンプルホールド回路26の出力と、第2センサ12bの検出コイル13bに関連するバッファアンプ32を介したサンプルホールド回路30の出力との差が算出されて出力される。
Returning to FIG. 2, the
上述のように、本実施例のセンサ部11においては、検出コイル13a、13bがアモルファスワイヤ14に対してその長手方向に対称な位置に設けられており、これらの検出コイル検出コイル13a、13bは外部磁界を等しく検知することができる。そのため、外部磁界のみが印加されている場合には理論的には両者の差動出力は零であり、実際にはノイズのみが出力されることとなる。これは後述する図7の(a)に対応する。一方、検出対象である磁性体50が磁性体検出装置10の検出対象範囲に存在あるいは通過した場合には、局所的に外部磁界が影響を受けるため、一対の検出コイル13a、13bのうちのいずれか一方がより大きい影響を受けることとなる。そのため、両者の差動出力に変動が生ずることとなる。
As described above, in the
図3は、本実施例の磁性体検出装置10における回路部21の構成の別の要部を説明する図である。具体的には、図2の差動アンプ34の出力voutの更なる処理が行なわれる部分を説明する図である。すなわち、回路部21は、図2に示された回路と図3に示された回路とを含んで構成される。なお、差動アンプ34は図2および図3の両方に重複して描かれている。
FIG. 3 is a diagram for explaining another main part of the configuration of the
具体的には、差動アンプ34の出力voutは、ハイパスフィルタ36によって所定の周波数、例えば0.3Hzより低い周波数成分は遮断される。また、アンプ38によって所定の増幅が行なわれる。続いてローパスフィルタによって、所定の周波数、例えば30Hzより高い周波数成分が遮断される。さらにノッチフィルタ42によって特定の周波数、例えば60Hzの周波数成分が遮断された後、アンプ44による所定の増幅が行なわれ、更にノッチフィルタ46により別の特定の周波数、例えば180Hzの周波数成分が遮断され、出力Eout(V)が出力される。この出力Eout(V)を予め得られている換算方法によって磁界強度に変換することにより、検出対象物50が通過あるいは存在することによる磁界強度の変化を得ることができる。
Specifically, the output v out of the
図4は、本実施例の磁性体検出装置10における制御装置90の機能の要部を説明する機能ブロック図である。すなわち、本実施例の磁性体検出装置10は制御装置90を有しており、前記センサ部11で検出され、回路部21で処理のされた信号が制御装置90に入力され、かかる信号に基づいて磁性体検出の有無が判断される。上記電子制御装置90は、CPU、ROM、RAM、入出力インターフェースなどから成る所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行う。
FIG. 4 is a functional block diagram illustrating a main part of the function of the
制御装置90は磁性体判別部52および出力制御部54を機能的に有している。磁性体判別部52は、前記回路部21から得られた信号であるVoutに基づいてセンサ部11の近傍に検出対象である磁性体50が存在するか(磁性体50を検出したか)否かを判別する。具体的には、本実施例のようにセンサ部11として一対の磁気センサ12が設けられる場合は、前記Voutの変化量ΔVoutが予め定められたしきい値ΔVthを上回った場合に、磁性体の影響による外部磁界とは異なる磁界の影響を受けているとして、磁性体50が存在しているもしくは通過したと判断する。
The
以下、しきい値Vthの設定方法について説明する。図5は、本発明の発明者らが行ったシミュレーションの概要を説明する図である。図5(a)に示すように、床面が一辺5mの正方形形状の遮蔽された空間の中心位置にセンサ部11を設け、そのセンサ部11の上下それぞれに2m離間して電磁ポテンシャル70をそれぞれ設け、地磁気の鉛直成分に対応する磁界を外部磁界として印可した。このときのセンサ部11と検出対象物50との関係を図5(b)に示す。検出対象物50としては、一辺3mmの正方形形状の鉄片を用いた。検出対象物50の大きさが大きいほど、その存在や通過などによる外部磁界の乱れが大きくなる。そのため、本シミュレーションにおいてはより小さい磁性体を想定することで本発明の磁性体検出装置10の検出限界を検討することができる。かかる場合に、センサ部11からの距離dyを変動させつつセンサ部11の出力における信号レベル比を、センサ部11のアモルファスワイヤ14の長さ(ワイヤ長)Lの複数の値について測定した結果を図6に示す。ここで距離dyはセンサ部11(アモルファスワイヤ14)と検出対象物50との距離であって、アモルファスワイヤ14の長手方向に垂直な方向の距離である。
Hereinafter, a method for setting the threshold value Vth will be described. FIG. 5 is a diagram for explaining the outline of the simulation performed by the inventors of the present invention. As shown in FIG. 5 (a), the
図6はアモルファスワイヤ14の長さLが100mm、200mmおよび300mmのそれぞれの場合における、アモルファスワイヤ14と磁性体50との距離dy(mm)に対する信号レベル比(%)の関係を示した図である。このとき、検出コイル12はそれぞれアモルファスワイヤ14の両端から2mm乃至5mmの位置に設けられており、検出コイルの出力はそのアモルファスワイヤ14の端部から2mmの位置から5mmの位置までの磁界のx成分(アモルファスワイヤ14の長手方向成分)の積算値に対応する。
FIG. 6 is a diagram showing the relationship of the signal level ratio (%) to the distance dy (mm) between the amorphous wire 14 and the
一方、2つのセンサ12aおよび12bはその出力が差動させられることから、センサ部11は磁界の勾配を検出するグラジオセンサとして機能することができる。ここで、グラジオセンサ(2つの磁気センサを直列に接続し、差動させる場合)の信号レベル比を次式(1)のように定義される。
信号レベル比=(検出用センサ12aの出力−参照用センサ12bの出力)/検出用センサ12aの出力×100 ・・・(1)
On the other hand, since the outputs of the two
Signal level ratio = (output of
この図6からわかるように、アモルファスワイヤ14と磁性体50との距離dyがアモルファスワイヤ14の長さLの3倍程度までの場合、概ね0.1%程度の信号レベル比の範囲で振動し、それよりも離れると収束する傾向がわかる。このように、前記しきい値Vthの設定に際しては、アモルファスワイヤ14の長さLと、検出しようとする磁性体50の大きさや磁性体50とアモルファスワイヤ14との距離などといった、磁性体検出装置の仕様を決定し、その仕様に応じてその場合に必要な信号レベル比が求められ、その信号レベル比に対応する電圧に換算することでしきい値Vthが決定される。より具体的には例えば、磁性体50がアモルファスワイヤ14の長さLの3倍までの距離までアモルファスワイヤ14に近接した場合の測定を行なうのであれば、信号レベル比0.1%の出力以上の場合に磁性体が存在もしくは通過したこととするので、その信号レベル比0.1%に対応するセンサ電圧がVthとなる。
As can be seen from FIG. 6, when the distance dy between the amorphous wire 14 and the
ところで、一対のセンサ12aおよび12bが鉛直方向に設置される場合(図5(b)のアモルファスワイヤ14の長手方向が鉛直方向である場合)を例として地磁気を考慮したしきい値Vthの設定について説明する。地磁気は地表における水平成分(水平分力)と鉛直成分(鉛直分力)との各ベクトルの和からなっている。一対のセンサ12aおよび12bが鉛直方向に設置される場合には、結合部材としてのアモルファスワイヤ14も鉛直方向とされることから、地磁気の鉛直成分が2つのセンサ12aおよび12bに共通して測定されることとなる。ところで、国土地理院が公表する磁気図によれば、鉛直分力の大きさは緯度および経度を用いた近似式得ることができる。2010.0年値におけるこの近似式(2)によれば、鉛直分力の値Z2010.0は、
Z2010.0=37056.760nT+1067.432nTΔφ−275.374nTΔλ−10.225nT(Δφ)2−9.609nTΔφΔλ+9.642nT(Δλ)2 ・・・(2)
である。ここでΔφ=φ−37°、Δλ=λ−138°、φおよびλはそれぞれ度単位で表された緯度および経度である。
By the way, setting the threshold value Vth in consideration of geomagnetism taking as an example the case where the pair of
Z 2010.0 = 37056.760 nT +1067.432 nT Δφ−275.374 nT Δλ−10.225 nT (Δφ) 2 −9.609 nT ΔφΔλ + 9.642 nT (Δλ) 2 (2)
It is. Here, Δφ = φ−37 °, Δλ = λ−138 °, φ and λ are latitude and longitude expressed in degrees, respectively.
前記(1)式のように定義される信号レベル比が0.1%とすると、例えば鉛直成分が10μTである場合において、センサ部11は10nTの出力ができればよいこととなる。すなわち、センサ12において10nTに対応する電圧がしきい値Vthとなる。なお、本実施例12におけるセンサ12は磁気インピーダンスセンサであり、100pT程度の分解能を有するので、このような要件を満たすことは十分可能である。
If the signal level ratio defined as in the equation (1) is 0.1%, for example, when the vertical component is 10 μT, the
また、上記(2)式で示したように、地磁気の鉛直成分が10μTに相当するのは概ね緯度15度程度であり、地磁気の鉛直成分は緯度が高くなるほど大きくなるので、鉛直成分が10μTである場合に所定の信号レベル比を満たすものであれば、赤道付近を除く地球上の多くの範囲で信号レベル比を満たすこととなる。 Further, as shown in the above equation (2), the vertical component of geomagnetism corresponds to 10 μT at about 15 degrees latitude, and the vertical component of geomagnetism increases as the latitude increases, so the vertical component is 10 μT. If a predetermined signal level ratio is satisfied in some cases, the signal level ratio is satisfied in many ranges on the earth except near the equator.
図7は、本実施例の磁気検出装置10において、アモルファスワイヤ14の長さLを200mmとした場合に、アモルファスワイヤ14の近傍を、検出対象物50として磁気を完全に消した(消磁した)長さ40mm程度のヘアピンを往復させた場合の1対のセンサ12a、12bの差動出力を表した図である。横軸が時間、縦軸が差動出力(電圧[V])を示している。このうち、図7(a)は、ヘアピンのない場合、すなわち外部磁界のみ存在する場合のものであり、本実施例の磁気検出装置10のノイズレベルを表したものとなる。図7(b)、(c)、および(d)はそれぞれアモルファスワイヤと検出対象物50としてのヘアピンとの距離dyをそれぞれ250、300、350mmとした場合の差動出力を表している。これらの図から分かるように、距離dyが300mm程度迄であれば、検出対象物50の動きに伴って差動出力が変化している。逆に言えば、差動出力に基づいて検出対象物50の動きを捉えることができる。
FIG. 7 shows that in the magnetic detection device 10 of the present embodiment, when the length L of the amorphous wire 14 is 200 mm, the magnetism is completely erased (demagnetized) using the vicinity of the amorphous wire 14 as the
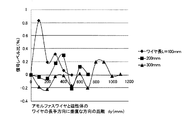
一方、図8はアモルファスワイヤ14と検出対象物50との距離と信号レベル比との関係について、アモルファスワイヤ14の長手方向に検出対象物50が離れる場合を説明する図である。図8の例においては図8(a)に示すように、検出対象物50がアモルファスワイヤ14の長手方向の延長線上に位置させられる。アモルファスワイヤ14の長手方向の端部のうち検出対象物50に近い側の端部から検出対象物50までのアモルファスワイヤ14の長手方向の距離をdxと定義する。ここで、アモルファスワイヤ14の長さLが100mm、および300mmの場合のそれぞれについて、アモルファスワイヤ14の端部から検出対象物50までの距離をdxに対するセンサ部11の信号レベル比の関係を示したのが図8(b)である。
On the other hand, FIG. 8 is a diagram for explaining the relationship between the distance between the amorphous wire 14 and the
図6に示したアモルファスワイヤ14と検出対象物50との長手方向と垂直な距離dyの場合と比べて、図8(b)に示すようにアモルファスワイヤ14と検出対象物50との長手方向の距離dxが大きくなるにつれて信号レベル比の減衰が大きい。すなわち、アモルファスワイヤ14の長手方向に置かれた検出対象物50の検出感度は低くなる。具体的には例えば、図6の場合で説明したような、信号レベル比が0.1%以上を磁性体の存在あるいは通過を検出するのに必要な値とする場合には、図8(b)からは、アモルファスワイヤ14の長さLとの関係は明確ではないが、アモルファスワイヤ14と検出対象物50とのアモルファスワイヤ14の長手方向の距離dxは、概ね150mm程度であればよいことがわかる。
Compared to the case of a distance dy perpendicular to the longitudinal direction between the amorphous wire 14 and the
以上を踏まえ、本実施例の磁性体検出装置10においてセンサの出力比が0.1%以上となった場合に磁性体が存在あるいは通過したと判断するとすれば、その磁性体の検出可能範囲は、センサ12を含む一平面上において図9で示すようなものとなる。すなわちセンサ部11の長手方向においてはアモルファスワイヤ14の両端部からそれぞれ150mmの範囲であり、また、センサ部11の長手方向に垂直な方向においては、一対のセンサ12aおよび12bの間の距離Lの3倍範囲となる。実際には、図9で示した図形を図9におけるセンサの長手方向、すなわちアモルファスワイヤ14の軸方向を中心に一回転させて得られる3次元の領域が、磁性体検出装置10における磁性体の検出可能範囲となる。なお、上述のように、本実施例においてはアモルファスワイヤ14両端部からそれぞれ2mmだけ内側の位置にセンサ12a、12bの端部が位置するようにセンサ12a,12bが設けられている。ここで、ワイヤ長Lに対してこの2mmの影響を無視できる場合には、ワイヤ長Lと一対のセンサ12aおよび12bとの距離とを同義と解することが可能である。
Based on the above, if it is determined that the magnetic material is present or passed when the output ratio of the sensor is 0.1% or more in the magnetic material detection device 10 of the present embodiment, the detectable range of the magnetic material is 9 on one plane including the sensor 12 as shown in FIG. That is, in the longitudinal direction of the
図4に戻って、出力制御部54は、前記磁性体判別部52が磁性体50が存在すると判断した場合に、出力装置にその旨を出力させる。この出力装置94は例えば図1に例示したように画像表示装置であってもよいし、ブザーなどの音声出力装置であってもよい。
Returning to FIG. 4, when the magnetic
図10は本実施例の磁性体検出装置10におけるセンサ部11の配置の一例を説明する図である。図10においては、一対のセンサ12の距離(あるいはワイヤ長)L=300mmのアモルファスワイヤ14が、その長手方向が鉛直方向となるようにセンサ部11が設置されている。そして、センサ部11(アモルファスワイヤ14)の中心が地上から750mmの高さとなるように設けられている。前述のように信号レベル比が0.1%以上において磁性体50を検出したと判断するようにしきい値が定められている場合には、磁性体50がアモルファスワイヤ14の長さの3倍程度までアモルファスワイヤ14に近接した場合に検出可能であるので、図9について説明した磁性体の検出可能範囲は、図10の例においては、その直径の最大がアモルファスワイヤ14を中心とする位置において1800mmのである。また、センサ11の長手方向の位置、すなわち高さ方向においては、地上から450mm乃至1050mmの範囲内に磁性体50が存在する場合にそれを検出することができる。
FIG. 10 is a diagram illustrating an example of the arrangement of the
前述の実施例によれば、磁性体検出装置10は、磁気結合型グラジオセンサであるセンサ部11を含んで構成され、センサ部11は一対の磁気センサ12a、12bと、一対の磁気センサ12a、12bを磁気的に結合する比透磁率が100以上の結合部材14とを含み、それら一対の磁気センサ12a、12bの距離及び結合部材の長さLは、それぞれ、一対のセンサ12a、12bの中心から検出対象となる磁性体位置までの距離dの1/3以上であるので、センサ部11における信号レベル比を考慮して検出対象物50の有無を判断することができる。
According to the above-described embodiment, the magnetic body detection device 10 includes the
また、前述の実施例によれば、磁性体検出装置10において、センサ部11は、地磁気の垂直方向の磁界成分の変化を検出するように設けられた少なくとも1つのセンサ部11を有するように構成されたので、センサ部11における結合部材14に地磁気の垂直方向の磁束成分が流れ、一対の磁気センサ12a、12bにより地磁気の垂直方向の磁束成分の変化が検出されるので、磁性体検出のための磁場発生源を必要としない構成が可能となる。
Further, according to the above-described embodiment, in the magnetic body detection device 10, the
続いて、本発明の別の実施例について説明する。以下の説明において、実施例相互に共通する部分については、同一の符号を付して説明を省略する。 Subsequently, another embodiment of the present invention will be described. In the following description, portions common to the embodiments are denoted by the same reference numerals and description thereof is omitted.
図11は、本発明の磁性体検出装置10において2つのセンサ部11Aおよび11Bが設けられる場合の設置態様を説明する図であって、前述の実施例の図10に対応する図である。図11においては、長さL=200mmのアモルファスセンサを有するセンサ部11Aおよび11Bが、それぞれ長手方向が鉛直方向となるように設けられている。そして、センサ部11Aおよび11Bの中心が地上からそれぞれ700mm、1100mmの高さとなるように設けられている。前述のように信号レベル比が0.1%以上において磁性体50を検出したと判断するようにしきい値が定められている場合には、磁性体50がアモルファスワイヤの長さの3倍程度までアモルファスワイヤに近接した場合に検出可能であるので、図9について説明した磁性体の検出可能範囲は、図11の例においては、その直径の最大がアモルファスワイヤ14を中心とする位置において1200mmの内である。また、センサ11の長手方向の位置、すなわち高さ方向においては、地上から450mm乃至1350mmの範囲内に磁性体50が存在する場合にそれを検出することができる。
FIG. 11 is a diagram for explaining an installation mode in the case where two
前述の実施例と同様、センサ部11Aおよび11Bはそれぞれ一対の磁気センサ12Aa、12Ab、および、12Ba、12Bbを有している。以下、これらを区別せず総称する場合には、磁気センサ12という。
As in the previous embodiment, the
本実施例においては、特に図示しないが2つのセンサ部11Aおよび11Bのそれぞれについて前述の実施例1の回路部21と同様の回路部21Aおよび21Bが設けられる。なお、本実施例においては2つのセンサ部11Aおよび11Bが設けられる例を説明するが、センサ部の数は2つに限定されない。また回路部21についてはセンサ部の数と同じだけ設けられればよい。
In the present embodiment, although not particularly illustrated, circuit portions 21A and 21B similar to the
なお、本実施例の回路部21A、21Bにおいては、前述の実施例における回路部21と同様に差動アンプ34の出力を増幅等して出力するのに加え、バッファアンプ28、32の出力をもそれぞれ同様に増幅等して出力するものとされている。ここでバッファアンプ28、32の出力はそれぞれ、検出コイル13a、13bの出力電圧に対応するものであり、それぞれのセンサ12a、12bが検出する磁界の強度に対応するものである。
In addition, in the circuit units 21A and 21B of the present embodiment, the outputs of the
図12は、本実施例の磁性体検出装置10における磁性体判別部52の制御作動の一例を説明するフローチャートである。このフローチャートは、磁性体検出装置10の作動中において、たとえば数ms(ミリ秒)乃至数十ms(ミリ秒)などの周期で繰り返し実行される。まず、ステップS(以下、「ステップ」を省略する。)1においては、磁性体検出装置10に含まれる複数のセンサ部11A、11Bのそれぞれから、対応する回路部21A、21Bの各差動アンプ34などを介して出力される差動出力が取得される。
FIG. 12 is a flowchart for explaining an example of the control operation of the magnetic
続くS2においては、S1で取得された複数のセンサ部11A、11Bのそれぞれからの差動出力のうち、予め設定された閾値を超えたものがあるか否かが判断される。ここで前記閾値Vthは、たとえば前述の実施例1において説明したように、信号レベル比がたとえば0.1%以上となる場合に磁性体が存在すると判断する場合には、その信号レベル比が0.1%に対応する差動出力Vout(電圧)となるように設定される。前記差動出力のうち1つでも前記閾値を上回ったものがある場合には本ステップの判断が肯定され、S3が実行される。前記さ同出力のうち1つも前記閾値を上回ったものがない場合は、本ステップの判断が否定され、本フローチャートが終了させられる。
In subsequent S2, it is determined whether or not there is a differential output from each of the plurality of
S2の判断が肯定された場合に実行されるS3においては、磁性体検出装置10の予め設定された検出範囲内に磁性体が存在もしくは通過したと判断される。 In S3, which is executed when the determination in S2 is affirmed, it is determined that the magnetic material is present or has passed within the preset detection range of the magnetic material detection device 10.
S3で磁性体が存在もしくは通過したと判断された場合には、S4が続いて実行される。このS4においては存在もしくは通過したと判断された磁性体の位置、大きさ、あるいはその磁性体の磁力の強さの少なくとも1つが推定される。この推定は、前述した複数のセンサ部11Aおよび11Bのそれぞれのセンサ12が検出する磁界の強度に対応するバッファアンプ28、32の出力を用いて行われる。このバッファアンプ28、32からの出力は、たとえばS1において差動出力が取り込まれる際に行われてもよいし、本ステップS4において行われてもよい。
If it is determined in S3 that the magnetic material is present or passed, S4 is subsequently executed. In S4, at least one of the position and size of the magnetic body determined to be present or passed or the strength of the magnetic force of the magnetic body is estimated. This estimation is performed using the outputs of the
S4における磁性体の位置の推定作動について説明する。前記複数のセンサ部11Aおよび11Bのそれぞれのセンサ12の出力の値を、その位置の順に並べる。そして並べた値に極値、すなわち極大値および極小値がいくつ存在するかが判断される。判断された極値の数を予め設定された判定条件に適用することにより磁性体の位置が推定される。
The operation of estimating the position of the magnetic body in S4 will be described. The output values of the sensors 12 of the plurality of
図13はこの判定条件の一例を説明する図である。図13に示すように、極値がない場合には、検出対象物50である磁性体は本実施例の磁性体検出装置10の検出対象範囲(推定対象範囲)の外にあって、かつ、信号強度の変化量が大きい方向にあると推定する。具体的には例えば、複数のセンサ部11をそれぞれ構成するセンサ12のうち、最も上端側にあるたとえば2つのセンサ12において検出される信号強度の変化割合、たとえば単位距離に対する変化量と、最も下端側にある2つのセンサ12における信号強度の変化割合とが比較される。そして、検出範囲外であって、信号強度の変化割合が大きい側に検出対象物50が存在すると推定される。また、極値の数が1個である場合には、その極値を検出したセンサ12の近傍に検出対象物50があると推定する。ここで、極値を検出したセンサ12の近傍とは、例えば、磁性体検出装置10の検出対象範囲のうち、全てのセンサ12のうちで極値を検出したセンサ12に最も近い位置の集合からなる領域を意味している。また、極値の数が2個以上である場合には、その極値のうち極大値を検出したセンサの位置と極小値を検出したセンサの位置との重心位置に検出対象物50が位置していると推定する。ここで好適には、前記重心位置の算出の際に、極大値および極小値であるそれぞれのセンサの信号強度に応じて重み付けを行なった上で重心位置を算出してもよい。
FIG. 13 is a diagram for explaining an example of this determination condition. As shown in FIG. 13, when there is no extreme value, the magnetic body that is the
続いて、S4において行なわれる、磁性体の磁力の強さの推定作動について説明する。磁性体の磁力の強さの推定は、センサ12のそれぞれにおいて測定された信号強度のうち、最大値と最小値との差の大きさに基づいて推定される。すなわち、磁性体の磁力の強さとは、存在もしくは通過した磁性体により外部磁界がどの程度影響を受けたかを示す指標であり、その単位は[T](テスラ)で表される。具体的には、信号強度の最大値と最小値との差と、検出対象物50である磁性体の磁力の強さとの関係を予め実験などにより求めておき、実際に検出された信号の最大値と最小値との差をこの関係に適用することにより、検出対象物50である磁性体の磁力の強さが得られる。図14はこの関係の一例を示した図である。図14に示されるように、信号強度の最大値と最小値との差が大きくなるほど、検出対象物50である磁性体の磁力の強さは強い関係である。
Next, the operation for estimating the strength of the magnetic force performed in S4 will be described. The strength of the magnetic force of the magnetic body is estimated based on the magnitude of the difference between the maximum value and the minimum value among the signal intensities measured in each of the sensors 12. In other words, the strength of the magnetic force of the magnetic material is an index indicating how much the external magnetic field is affected by the existing or passed magnetic material, and its unit is represented by [T] (Tesla). Specifically, the relationship between the difference between the maximum value and the minimum value of the signal intensity and the strength of the magnetic force of the magnetic body that is the
さらに、S4において行なわれる、磁性体の大きさの推定作動について説明する。磁性体の大きさの推定は、センサ12のそれぞれにおいて測定された信号強度のうち、極大値を検出したセンサの位置と極小値を検出したセンサの位置との距離に基づいて推定される。具体的には、極大値を検出したセンサの位置と極小値を検出したセンサの位置との距離と、検出対象物50である磁性体の大きさとの関係を予め実験などにより求めておき、実際に信号強度が検出された場合の極大値を検出したセンサの位置と極小値を検出したセンサの位置との距離をこの関係に適用することにより、検出対象物50である磁性体の大きさが得られる。図15はこの関係の一例を示した図である。図14に示されるように、極大値を検出したセンサの位置と極小値を検出したセンサの位置との距離が大きくなるほど、検出対象物50である磁性体の大きさは大きい関係である。なお、極大値や極小値がそれぞれ複数ある場合には、隣り合う極大値と極小値のうち、極大値と極小値の差が最も大きい組を選択して判断を行なうことができる。
Further, the operation of estimating the size of the magnetic material performed in S4 will be described. The size of the magnetic body is estimated based on the distance between the position of the sensor that detects the maximum value and the position of the sensor that detects the minimum value among the signal intensities measured in each of the sensors 12. Specifically, the relationship between the distance between the position of the sensor that has detected the maximum value and the position of the sensor that has detected the minimum value and the size of the magnetic body that is the
前述の実施例の磁性体検出装置10によれば、センサ部11(11A、11B)を複数有し、それら複数のセンサ部11の出力信号に基づいて磁性体50を検出する磁性体判別部52を有するので、磁性体検出装置10が磁性体50を検出することのできる検出対象範囲を大きくすることができる。
According to the magnetic body detection device 10 of the above-described embodiment, a plurality of sensor units 11 (11A, 11B) are provided, and a magnetic
また、前述の実施例の磁性体検出装置10によれば、センサ部11(11A、11B)を複数有し、それら複数のセンサ部11の出力信号に基づいて、複数のセンサ部11の出力信号に基づいて、磁性体の有無のみならず磁性体50の位置および磁性体の磁力の強さ、磁性体の大きさの少なくとも1つを推定することができる。
Moreover, according to the magnetic substance detection apparatus 10 of the above-mentioned Example, it has multiple sensor part 11 (11A, 11B), and based on the output signal of these
その他、一々例示はしないが、本発明はその趣旨を逸脱しない範囲内において種々の変更が加えられて実施されるものである。 In addition, although not illustrated one by one, the present invention is implemented with various modifications within a range not departing from the gist thereof.
例えば、前述の実施例においては、センサ部11が1つ乃至2つ設けられる実施例が説明されたが、これに限定されるものではなく、例えば3以上のセンサ部11が同時に設けられてもよい。また、センサ部11が複数設けられる場合には、それらのセンサ部11の間隔は磁性体検出装置10の磁性体の検出可能領域が一様となるように適宜調節しうるものである。すなわち、前述の通り磁性体検出装置10の磁性体検出可能領域は図9に示した図形を横軸方向を中心に回転させたものであるので、横方向にみるとその位置に応じて検出可能な径方向の大きさが異なっている。これを複数のセンサ部11により補完し、磁性体の検出可能な領域が例えば径方向にばらつきが少なくなるような配置を行なうことが可能である。この際、複数のセンサ部11は前述の実施例2のように複数のセンサ部11が長手方向に間隔をおいて設けられてもよいし、あるいは重なるように設けられてもよい。
For example, in the above-described embodiment, the embodiment in which one or two
また、前述の実施例においては、結合部材であるアモルファスワイヤ14は一対のセンサ12を貫くように設けられていたが、このような態様に限られない。すなわち、一対のセンサ12を磁気的に結合するものであればよく、例えば直線上に配設された一対のセンサ12に対して、その直線上において該一対のセンサ12に対して中央に位置するように該一対のセンサ12の間隔よりも短い結合部材が設けられてもよい。言い換えれば、前述の実施例において結合部材14が一対のセンサ12を貫かない程度の長さであってもよい。 Further, in the above-described embodiment, the amorphous wire 14 as the coupling member is provided so as to penetrate the pair of sensors 12, but is not limited to such a mode. That is, any sensor that couples the pair of sensors 12 magnetically can be used. For example, the pair of sensors 12 arranged on a straight line is positioned at the center of the pair of sensors 12 on the straight line. Thus, a coupling member shorter than the distance between the pair of sensors 12 may be provided. In other words, the length may be such that the coupling member 14 does not penetrate the pair of sensors 12 in the above-described embodiment.
また、前述の実施例2においては、複数のセンサ部11の各センサ12の極値に基づいて検出対象物50の位置を推定したが、かかる態様に限られず、例えば、差動出力や信号レベル比の値が最も大きいセンサ部11の近傍に検出対象物50が存在すると推定することも可能である。
In the above-described second embodiment, the position of the
また、前述の実施例においてはセンサ部11は鉛直方向に配設され、地磁気の垂直成分の変化を一対のセンサ12により検出するようにされたが、このような態様に限られない。すなわち、水平方向に配設されたセンサ部11を少なくとも1つ含むことにより地磁気の水平成分の変化を一対のセンサ12により検出する構成とすることも可能である。これは、地磁気の水平成分が一定以上含まれる地域においては有効であり、特に地磁気の垂直成分が小さい地域においてはさらに有効であると考えられる。このようにすれば、前記磁気結合型グラジオセンサにおける結合部材に地磁気の水平方向の磁束成分が流れ、前記一対の磁気センサにより該地磁気の垂直方向の水平成分の変化が検出されるので、磁性体検出のための磁場発生源を必要としない構成が可能となる。また、センサ部11が水平面に設置されることができるので、例えばマット状の形態とすることができる。
In the above-described embodiment, the
さらに、センサ部11が複数設けられる場合に、それら複数のセンサ部11の少なくとも1つは他に対して角度を有するように設けられるようにすることも可能である。このようにすれば、前記複数のセンサ部11により、地磁気の垂直方向および水平成分の磁界成分の変化が検出されるので、地磁気の垂直成分、あるいは水平成分のいずれか一方が磁性体検出に用いることができない場合であっても好適に磁性体の検出を行うことができる。
Furthermore, when a plurality of
さらに、前述の実施例においては、結合部材としてのアモルファスワイヤは一部材として設けられたが、かかる態様に限られず、一対のセンサ12を磁気的に結合し、それら一対の磁気センサ12に外部磁界の影響を等しく与えるものであれば様々な態様が可能である。例えば、アモルファスワイヤ14に間隙が設けられても良いし、アモルファスワイヤ14の一部がその他の部分と異なる素材から構成されていてもよい。 Furthermore, in the above-described embodiment, the amorphous wire as the coupling member is provided as one member. However, the present invention is not limited to such an embodiment, and the pair of sensors 12 are magnetically coupled, and an external magnetic field is coupled to the pair of magnetic sensors 12. Various aspects are possible as long as they have the same effect. For example, a gap may be provided in the amorphous wire 14, or a part of the amorphous wire 14 may be made of a material different from other parts.
10:磁性体検出装置
11:センサ部(磁気結合型グラジオセンサ)
12、12a、12b:磁気センサ
14:結合部材(アモルファスワイヤ)
50:検出対象物(磁性体)
10: Magnetic body detection device 11: Sensor part (magnetic coupling type gradio sensor)
12, 12a, 12b: Magnetic sensor 14: Coupling member (amorphous wire)
50: Object to be detected (magnetic material)
Claims (5)
該磁気結合型グラジオセンサのそれぞれは、一対の磁気センサと、該一対の磁気センサを磁気的に結合する比透磁率が100以上の結合部材とを含んで長手状に構成され、
前記磁気結合型グラジオセンサのそれぞれは、長手方向の向きが直線上になるように配置され、
該磁性体検出装置は、前記磁気結合型グラジオセンサのそれぞれの長手方向において該磁気結合型グラジオセンサのそれぞれの両端から該長手方向かつ該磁気結合型グラジオセンサのそれぞれの中心から離れる向きにそれぞれ150mm以内、および、前記磁気結合型グラジオセンサのそれぞれの径方向において、前記一対の磁気センサの間隔Lとした場合において前記磁気結合型グラジオセンサのそれぞれを中心とした半径3L以内の範囲を検出範囲とし、該検出範囲における検出対象の有無を検出すること、
を特徴とする磁性体検出装置。
A magnetic body detection device including a plurality of magnetically coupled gradio sensors,
Each of the magnetic coupling type gradio sensors includes a pair of magnetic sensors and a coupling member having a relative permeability of 100 or more for magnetically coupling the pair of magnetic sensors.
Each of the magnetically coupled gradio sensors is arranged so that the longitudinal direction is on a straight line,
Magnetic body detection device, each 150mm in each longitudinally from both ends of the magnetic coupling gradiometer sensor in a direction away from the longitudinal and the respective centers of the magnetic coupling gradiometer sensor of the magnetic coupling gradiometer sensor And a range within a radius of 3L centered on each of the magnetic coupling type gradio sensors when the distance L between the pair of magnetic sensors is set to be a distance L in each radial direction of the magnetic coupling type gradio sensor. Detecting the presence or absence of a detection target in the detection range;
A magnetic substance detection device characterized by the above.
を特徴とする請求項1に記載の磁性体検出装置。 2. The magnetic body detection device according to claim 1, wherein the magnetic coupling type gradio sensor includes at least one magnetic coupling type gradio sensor provided so as to detect a change in a magnetic field component in a vertical direction of geomagnetism. .
を特徴とする請求項1または2に記載の磁性体検出装置。 3. The magnetic body according to claim 1, wherein the magnetic coupling type gradio sensor includes at least one magnetic coupling type gradio sensor provided so as to detect a change in a horizontal magnetic field component of geomagnetism. 4. Detection device.
該複数の磁気結合型グラジオセンサの出力信号に基づいて磁性体を検出する磁性体判別部を有すること
を特徴とする請求項1乃至3のいずれか1に記載の磁性体検出装置。 A plurality of the magnetically coupled gradio sensors;
The magnetic body detection device according to claim 1, further comprising a magnetic body determination unit that detects a magnetic body based on output signals of the plurality of magnetically coupled gradio sensors.
前記磁性体判別部は、該複数の磁気結合型グラジオセンサの出力信号に基づいて、磁性体の位置および該磁性体の磁力の強さ、磁性体の大きさの少なくとも1つを推定すること
を特徴とする請求項4のいずれか1に記載の磁性体検出装置。
A plurality of the magnetically coupled gradio sensors;
The magnetic body discriminating unit estimates at least one of the position of the magnetic body, the strength of the magnetic force of the magnetic body, and the size of the magnetic body based on output signals of the plurality of magnetically coupled gradio sensors. The magnetic body detection device according to claim 4, wherein the magnetic body detection device is a magnetic material detection device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013193458A JP6413111B2 (en) | 2013-09-18 | 2013-09-18 | Magnetic detection device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013193458A JP6413111B2 (en) | 2013-09-18 | 2013-09-18 | Magnetic detection device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015059823A JP2015059823A (en) | 2015-03-30 |
| JP6413111B2 true JP6413111B2 (en) | 2018-10-31 |
Family
ID=52817472
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013193458A Active JP6413111B2 (en) | 2013-09-18 | 2013-09-18 | Magnetic detection device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6413111B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017062122A (en) * | 2015-09-23 | 2017-03-30 | 国立大学法人名古屋大学 | Magnetic field detector |
| JP6021238B1 (en) | 2015-10-11 | 2016-11-09 | マグネデザイン株式会社 | Gradio sensor element and gradio sensor |
| CN108469593A (en) * | 2018-04-02 | 2018-08-31 | 南京麦科尼传感技术有限公司 | A kind of comprehensive magnetic field gradient sensor of high-resolution orthogonal fluxgate based on amorphous wire orthogonal array |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4814275U (en) * | 1971-06-26 | 1973-02-17 | ||
| JP2003004831A (en) * | 2001-04-17 | 2003-01-08 | Hitachi Metals Ltd | Orthogonal flux gate type magnetic sensor |
| JP3691015B2 (en) * | 2001-12-17 | 2005-08-31 | アイチ・マイクロ・インテリジェント株式会社 | Magnetic detection gate system |
| JP2005147728A (en) * | 2003-11-12 | 2005-06-09 | Fuji Electric Holdings Co Ltd | Magnetic field/current sensor |
| JP2009535616A (en) * | 2006-04-28 | 2009-10-01 | マイクロゲート インコーポレイテッド | Thin film type triaxial fluxgate and manufacturing method thereof |
| JP5110142B2 (en) * | 2010-10-01 | 2012-12-26 | 愛知製鋼株式会社 | Magnetoimpedance sensor element and manufacturing method thereof |
| JP5429717B2 (en) * | 2011-03-07 | 2014-02-26 | 国立大学法人名古屋大学 | Magnetic detector |
-
2013
- 2013-09-18 JP JP2013193458A patent/JP6413111B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015059823A (en) | 2015-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2821800B1 (en) | Current detection device | |
| JP6172237B2 (en) | Magnetic marker detection method and magnetic marker detection apparatus | |
| JP5429717B2 (en) | Magnetic detector | |
| US20130300401A1 (en) | Sensor Apparatus, in Particular Metal Sensor, with a Field-Compensated Magnetic Field Sensor | |
| US8610429B2 (en) | Magnetic field sensor device | |
| EP2615422A1 (en) | Active mechanical force and axial load sensor | |
| US8581593B2 (en) | Underground electromagnetic exploration method | |
| CN109416545B (en) | Magnetic mark detection system and magnetic mark detection method | |
| JP6413111B2 (en) | Magnetic detection device | |
| EP2878945A1 (en) | Conductive foreign material detecting apparatus | |
| JP2017062122A (en) | Magnetic field detector | |
| JP6296851B2 (en) | Defect depth estimation method and defect depth estimation apparatus | |
| CN106959119B (en) | Method and device for monitoring moving object | |
| JP6843430B2 (en) | Reinforcing bar diameter and fog measuring device for reinforced concrete | |
| CN103454339B (en) | A kind of autoexcitation shields full magnetic information induction sniffer | |
| RU2634366C2 (en) | Method for magnetic flaw detection and device for its implementation | |
| JP7549617B2 (en) | Device for detecting wheels on a rail track | |
| JP2017194353A (en) | Polarity measurement method and polarity measuring device of magnetic marker | |
| JP5076970B2 (en) | Electric charge type electric circuit accident investigation device and accident investigation method | |
| US20140172353A1 (en) | Method and Apparatus for Estimating Position of a Ferromagnetic Object | |
| Barbashova et al. | DETERMINATION OF ELECTROMAGNETIC PARAMETERS OF METAL CAR BODY AS A THIN-WALLED SHEET METALS AT MAGNETIC PULSE TREATMENT | |
| JPWO2020170637A1 (en) | probe | |
| JP6292998B2 (en) | Pipe locating method | |
| BG1065U1 (en) | Appliance with an induction magnetometer transducer for detection of deep lying metal objects | |
| JP2015219121A (en) | Method for detecting metallic foreign matter in insulator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160916 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170728 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171205 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180403 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180807 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180905 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6413111 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |