JP6285398B2 - Small flight system - Google Patents
Small flight system Download PDFInfo
- Publication number
- JP6285398B2 JP6285398B2 JP2015156459A JP2015156459A JP6285398B2 JP 6285398 B2 JP6285398 B2 JP 6285398B2 JP 2015156459 A JP2015156459 A JP 2015156459A JP 2015156459 A JP2015156459 A JP 2015156459A JP 6285398 B2 JP6285398 B2 JP 6285398B2
- Authority
- JP
- Japan
- Prior art keywords
- small
- unit
- flying object
- landing
- flight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 claims description 30
- 238000012544 monitoring process Methods 0.000 claims description 29
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical group C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 claims description 10
- 230000001960 triggered effect Effects 0.000 claims description 4
- 238000012876 topography Methods 0.000 claims 1
- 238000004891 communication Methods 0.000 description 38
- 238000010586 diagram Methods 0.000 description 38
- 238000000034 method Methods 0.000 description 26
- 230000006870 function Effects 0.000 description 18
- 238000001514 detection method Methods 0.000 description 10
- 238000007599 discharging Methods 0.000 description 10
- 238000012790 confirmation Methods 0.000 description 6
- 238000007726 management method Methods 0.000 description 5
- 238000010248 power generation Methods 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 5
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 4
- 229910052782 aluminium Inorganic materials 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000001681 protective effect Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 3
- 238000004873 anchoring Methods 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000009877 rendering Methods 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000009429 distress Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000012905 input function Methods 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000000575 pesticide Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images






















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D17/00—Parachutes
- B64D17/80—Parachutes in association with aircraft, e.g. for braking thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D25/00—Emergency apparatus or devices, not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
- B64D45/04—Landing aids; Safety measures to prevent collision with earth's surface
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/02—Automatic approach or landing aids, i.e. systems in which flight data of incoming planes are processed to provide landing data
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
本発明は、小型飛行システムに関するものである。 The present invention relates to a small flight system.
近年、小型飛行体の普及が著しい。このため、小型飛行体の飛行制御に関する技術研究が活発に行われている(例えば特許文献1乃至3参照)。
In recent years, the spread of small aircraft has been remarkable. For this reason, the technical research regarding the flight control of a small air vehicle is actively performed (for example, refer
しかしながら、近年、小型飛行体の飛行数が飛躍的に増えており、安全面の見地等から、飛行中の小型飛行体の夫々を的確に監視して管理する技術の確立が要求されているところ、特許文献1乃至3を含む従来の技術では当該要求に十分に応えることができない状況である。
However, in recent years, the number of small aircraft has increased dramatically, and from the standpoint of safety, the establishment of technology to accurately monitor and manage each of the small aircraft in flight is required. However, the conventional techniques including
本発明は、このような状況に鑑みてなされたものであり、飛行中の小型飛行体を的確に監視し管理する技術を確立することを目的とする。 The present invention has been made in view of such circumstances, and an object thereof is to establish a technique for accurately monitoring and managing a small flying object in flight.
上記目的を達成するため、本発明の一実施形態である小型飛行システムは、
N台の小型飛行体と、前記N台の小型飛行装置を管理する管理装置とを有する小型飛行システムにおいて、
前記N台の小型飛行体の夫々は、
自己を一意に特定するものとして予め登録されている識別子を、飛行体IDとして記憶する飛行体ID記憶部と、
前記飛行体IDの送信を制御する送信制御部と、
を備え、
前記管理装置は、
飛行物体から送信される情報を取得する取得部と、
前記取得部に取得された前記情報に識別子が含まれている場合、前記N台の小型飛行体毎の前記飛行体IDが記憶された所定のDBにアクセスして、当該識別子と一致している飛行体IDを検索し、前記飛行物体を、当該識別子と一致する飛行体IDから特定される小型飛行体であるとして認証する認証部と、
前記認証部の認証結果に基づいて、前記N台の小型飛行体の夫々の飛行状況を監視する監視部と、
を備える。
In order to achieve the above object, a small flight system according to an embodiment of the present invention includes:
In a small flight system having N small aircrafts and a management device for managing the N small flight devices,
Each of the N small vehicles is
A vehicle ID storage unit for storing an identifier registered in advance as a vehicle ID to uniquely identify itself;
A transmission control unit for controlling transmission of the flying object ID;
With
The management device
An acquisition unit for acquiring information transmitted from the flying object;
When an identifier is included in the information acquired by the acquisition unit, a predetermined DB in which the flying body ID is stored for each of the N small flying bodies is accessed and matches the identifier. An authentication unit that searches for a flying object ID and authenticates the flying object as a small flying object identified from a flying object ID that matches the identifier;
Based on the authentication result of the authentication unit, a monitoring unit that monitors the flight status of each of the N small aircrafts;
Is provided.
前記N台の小型飛行体の夫々において、
現在位置を示す位置情報を取得する位置情報取得部をさらに備え、
前記送信制御部は、前記飛行体IDと共に、さらに前記位置情報を送信する制御を実行し、
前記管理装置の前記監視部は、
前記認証部により所定の前記小型飛行体であると認証された前記飛行物体の現在位置を、当該飛行物体から送信される前記情報に含まれる前記位置情報に基づいて特定することで、当該飛行物体の飛行状況を監視する、
ようにすることができる。
In each of the N small vehicles,
It further includes a position information acquisition unit that acquires position information indicating the current position,
The transmission control unit executes control for transmitting the position information together with the flying object ID,
The monitoring unit of the management device includes:
By identifying the current position of the flying object that is authenticated by the authentication unit as the predetermined small flying object based on the position information included in the information transmitted from the flying object, the flying object To monitor the flight status of
Can be.
前記監視部は、さらに、
前記認証部により所定の前記小型飛行体であると認証された前記飛行物体の前記現在位置が、予め決められた空路に入っているか否かを判断することで、当該飛行物体の飛行状況を監視する、
ようにすることができる。
The monitoring unit further includes:
The flight status of the flying object is monitored by determining whether or not the current position of the flying object that has been authenticated as the predetermined small aircraft by the authentication unit is in a predetermined air route. To
Can be.
前記管理装置は、
前記N台の小型飛行体のうち、前記監視部により前記空路から外れた小型飛行体が存在すると監視された場合、当該小型飛行体に対する警告を発する警告部をさらに備える、
ようにすることができる。
The management device
A warning unit that issues a warning to the small flying object when the monitoring unit monitors that there is a small flying object out of the air path among the N small flying objects;
Can be.
前記N台の小型飛行体の夫々において、
飛行用の駆動を開始したか否かを監視する飛行駆動監視部をさらに備え、
前記送信制御部は、前記飛行駆動監視部により前記飛行用の駆動の開始が監視されたことをトリガとして、前記飛行体IDの送信を開始する制御を実行する、
ことができる。
In each of the N small vehicles,
A flight drive monitoring unit for monitoring whether or not driving for flight has started;
The transmission control unit executes control to start transmission of the flying object ID triggered by the start of the flight drive being monitored by the flight drive monitoring unit.
be able to.
前記N台の小型飛行体の夫々において、
緊急時における着陸を制御する緊急着陸制御部をさらに備える、
ことができる。
In each of the N small vehicles,
An emergency landing control unit for controlling landing in an emergency;
be able to.
本発明によれば、飛行中の小型飛行体を的確に監視し管理する技術を確立することができる。 According to the present invention, it is possible to establish a technique for accurately monitoring and managing a small flying object in flight.
図1は、本発明の一実施形態の小型飛行システムの全体構成を示している。
図1に示す小型飛行システムは、N台(Nは1以上の任意の整数値)の小型飛行体1−1乃至1−Nと、M台(MはNとは独立した1以上の任意の整数値)の着陸誘導ポート装置2−1乃至2−Mと、サーバ3と、ポートID登録者所持装置4乃至6とが、インターネット等の所定のネットワークNを介して相互に接続されることによって構成されている。
FIG. 1 shows the overall configuration of a small flight system according to an embodiment of the present invention.
The small flight system shown in FIG. 1 includes N (N is an arbitrary integer value of 1 or more) small aircrafts 1-1 to 1-N and M (M is one or more arbitrary independent of N). (Integer value) landing guide port devices 2-1 to 2-M,
なお、以下、小型飛行体1−1乃至1−Nの夫々を個々に区別する必要がない場合、これらをまとめて「小型飛行体1」と呼ぶ。また、着陸誘導ポート装置2−1乃至2−Mの夫々を個々に区別する必要がない場合、これらをまとめて「着陸誘導ポート装置2」と呼ぶ。
Hereinafter, when it is not necessary to individually distinguish each of the small aircrafts 1-1 to 1-N, these are collectively referred to as “
小型飛行体1は、航空法上の航空機に該当しない航空機のうち、人が搭乗することができない小型の航空機(小型無人機)であって、例えば模型航空機等で構成される。
The
着陸誘導ポート装置2は、小型飛行体1の着陸の可能性がある場所に配置され、当該小型飛行体1を誘導して着陸させるための装置である。
The landing
具体的には、着陸誘導ポート装置2は、自己を一意に特定するものとして予め登録されている識別子(以下、「ポートID」と呼ぶ)を記憶しており、当該ポートIDを重畳した所定の電波を、小型飛行体1を誘導して着陸させるための誘導電波として送信する。
小型飛行体1は、飛行前におけるユーザ等の入力に基づいて、着陸ポート装置2−1乃至2−Mのうち行き先となる着陸誘導ポート装置2のポートIDを、行先ポートIDとして登録している。そこで、小型飛行体1は、飛行中に誘導電波を受信すると、当該誘導電波からポートIDを描出する。
小型飛行体1は、当該ポートIDが行先ポートIDと一致するか否かを確認し、一致すると確認した場合、当該誘導電波に従って、当該誘導電波の送信位置(即ち、当該誘導電波を送信している着陸ポート装置2)に着陸する。
Specifically, the landing
The
The
なお、着陸誘導ポート装置2と小型飛行体1との間で実行されるその他の各種処理については、図6等を参照して後述する。
Various other processes executed between the landing
サーバ3は、小型飛行体1と着陸誘導ポート装置2の各動作を監視したり管理すべく、各種処理を実行する。
The
具体的には例えば、サーバ3は、次のようにして、小型飛行体1−1乃至1−Nの夫々の飛行状況を監視する。
即ち、本実施形態では、小型飛行体1−1乃至1−Nの夫々には、他の小型飛行体1と区別して自己を一意に特定する識別子(以下、飛行体IDと呼ぶ)が夫々予め付されている。
所定の小型飛行体1の飛行体IDは、当該所定の小型飛行体1自身に記憶されていると共に、所定のDBにも登録されている。なお、所定のDBの存在場所は、特に限定されず、サーバ3とは別の場所であってもよいが、本実施形態ではサーバ3内とされている(後述の図5と図6の小型飛行DB321参照)。
そこで、飛行中の小型飛行体1−K(Kは、1乃至Nのうち任意の整数値)は、自機の飛行体IDを送信するようにする。
サーバ3は、とある飛行物体の当該飛行体IDを受信すると(この時点では、小型飛行体1−Kのものであることをサーバ3は認識できていないので)、当該飛行体IDは登録されているものか否かを判定する。いまの場合、当該飛行体IDは、小型飛行体1−Kのものとして登録されていると判定されることになる。つまり、飛行物体は、小型飛行体1−Kであると認証される。そこで、サーバ3は、認証した小型飛行体1−Kの飛行状況、例えば予め定められた空路から外れていないか等の飛行状況を監視する。
Specifically, for example, the
That is, in the present embodiment, each of the small aircrafts 1-1 to 1-N has an identifier (hereinafter referred to as an aircraft ID) that uniquely identifies itself in distinction from the other
The air vehicle ID of the predetermined
Therefore, the small flying object 1-K in flight (K is an arbitrary integer value from 1 to N) transmits its own flying object ID.
When the
なお、サーバ3のその他の各種処理については、図5等を参照して後述する。
Various other processes of the
ポートID登録者所持装置4乃至6は、特定の着陸誘導ポート装置2の使用者として、当該特定の着陸誘導ポート装置2のポートIDを事前に登録している者(以下、「ポートID登録者」と呼ぶ)に所持される装置であり、例えば、パーソナルコンピュータ、スマートフォン、タブレット等で構成される。
The port ID registrant possessing devices 4 to 6 are persons who have previously registered the port ID of the specific landing
例えば図1の例では、ポートID登録者所持装置4のポートID登録者は、着陸誘導ポート装置2−1のポートIDを事前に登録している者である。ポートID登録者所持装置5,6のポートID登録者は、着陸誘導ポート装置2−MのポートIDを事前に登録している者である。
For example, in the example of FIG. 1, the port ID registrant of the port ID registrant possessing device 4 is a person who has registered in advance the port ID of the landing guide port device 2-1. The port ID registrants of the port ID
図2は、図1の小型飛行システムのうち、小型飛行体1のハードウェアの構成を示すブロック図である。
FIG. 2 is a block diagram showing a hardware configuration of the
小型飛行体1は、CPU(Central Processing Unit)11と、ROM(Read Only Memory)12と、RAM(Random Access Memory)13と、バス14と、入出力インターフェース15と、飛行制御部16と、GPS部17と、通常着陸制御部18と、記憶部19と、飛行体ID制御部20と、カメラ部21と、運搬物収容部22と、緊急着陸制御部23と、充電部24と、ドライブ25とを備えている。
The
CPU11は、ROM12に記録されているプログラム、又は、記憶部19からRAM13にロードされたプログラムに従って各種の処理を実行する。
RAM13には、CPU11が各種の処理を実行する上において必要なデータ等も適宜記憶される。
The
The
CPU11、ROM12及びRAM13は、バス14を介して相互に接続されている。このバス14にはまた、入出力インターフェース15も接続されている。入出力インターフェース15には、飛行制御部16と、GPS部17と、通常着陸制御部18と、記憶部19と、飛行体ID制御部20と、カメラ部21と、運搬物収容部22と、緊急着陸制御部23と、充電部24と、ドライブ25とが接続されている。
The
飛行制御部16は、CPU11やGPS部17から得られる情報に基づき、小型飛行体1の飛行動作、例えば離陸、上昇、下降、旋回、着陸等を制御する。
The
GPS部17は、アンテナを含み複数のGPS(Global Positioning System)用衛星からのGPS信号を受信して、当該GPS信号から小型飛行体1の現在位置(緯度、経度)を示す位置情報を取得する。
The
通常着陸制御部18は、入力部181と、通信部182とを備え、小型飛行体1の通常の着陸動作、本実施形態では着陸誘導ポート装置2への着陸動作を制御する。
入力部181は、ユーザ等の操作により、小型飛行体1の行先となる着陸誘導ポート装置2のポートIDを入力する。
通信部182は、着陸誘導ポート装置2と通信をし、各種情報を送受信する。
例えば通信部182は、着陸誘導ポート装置2から送信されてきた誘導電波を受信する。この場合、通信部182に受信された誘導電波には、上述した様に、当該誘導電波を送信した着陸誘導ポート装置2のポートIDが含まれている。通信部182に受信された誘導電波に含まれているポートIDと、入力部181により入力されたポートIDとが一致する場合、誘導電波を送信した着陸誘導ポート装置2が行先であることが特定される。この場合、小型飛行隊1は、当該誘導電波に従って、行先である着陸誘導ポート装置2に着陸する。ついては、図5を参照して後述する。
The normal
The
The
For example, the
記憶部19は、ハードディスクやDRAM(Dynamic Random Access Memory)等で構成され、各種データを記憶する。
The
飛行体ID制御部20は、小型飛行体1における飛行体IDの取り扱いを制御すべく、飛行体ID記憶部201と、通信部202とを備えている。
飛行体ID記憶部201は、自機の小型飛行体1に付された飛行体IDを記憶する。
通信部202は、飛行体ID記憶部201に記憶されている飛行体IDを、所定の無線通信規格に従って無線送信する。無線送信された飛行体IDは、上述したように、サーバ3に受信されると、自機の小型飛行体1の認証に用いられる。
The flying object
The flying object
The
カメラ部21は、例えば小型飛行体1の下方の様子を撮影し、その結果得られる画像データをCPU11に提供する。CPU11は、当該画像データに対して各種画像処理を施し、当該画像処理の結果を、現在位置の認識等をするための支援となる情報として適宜用いる。
The
運搬物収容部22は、運搬物を施錠して収容し、所定の要件を満たした場合に施錠を解除する。ここで、所定の条件は特に限定されず、本実施形態では、小型飛行体1の着陸の検出という要件を少なくとも含んでいる。その他例えば、暗証番号の入力を受付け、当該暗証番号が正しいことという要件を含めることができる。
The transported
緊急着陸制御部23は、小型飛行体1が何らかの要因により継続飛行できない場合に、小型飛行体1が安全な場所に緊急着陸するための動作を制御する。
充電部24は、小型飛行体1の駆動に必要な電力を放電するバッテリ(図示せず)に対して、後述する着陸誘導ポート装置2の充放電部61から供給されてくる電力を用いて充電する。
The emergency
The charging
ドライブ25には、必要に応じて、リムーバブルメディア31が適宜装着される。ドライブ25によってリムーバブルメディア31から読み出されたプログラムは、必要に応じて記憶部19にインストールされる。また、リムーバブルメディア31は、記憶部19に記憶されている各種データも、記憶部19と同様に記憶することができる。
A
図3は、図1の小型飛行システムのうち、サーバ3のハードウェアの構成を示すブロック図である。
FIG. 3 is a block diagram showing a hardware configuration of the
サーバ3は、CPU81と、ROM82と、RAM83と、バス84と、入出力インターフェース85と、出力部86と、入力部87と、記憶部88と、通信部89と、ドライブ90とを備えている。
The
CPU81は、ROM82に記録されているプログラム、又は、記憶部88からRAM83にロードされたプログラムに従って各種の処理を実行する。
RAM83には、CPU81が各種の処理を実行する上において必要なデータ等も適宜記憶される。
The
The
CPU81、ROM82及びRAM83は、バス84を介して相互に接続されている。このバス84にはまた、入出力インターフェース85も接続されている。入出力インターフェース85には、出力部86と、入力部87と、記憶部88と、通信部89と、ドライブ90が接続されている。
The
出力部86は、ディスプレイやスピーカ等で構成され、画像や音声等の各種情報を出力する。
入力部87は、マウスやキーボード等で構成され、各種情報を入力する。
記憶部88は、ハードディスクやDRAM等で構成され、飛行体ID、各種データを記憶する。
通信部89は、ネットワークNを介して別装置(本実施形態では主に図1に記載の各小型飛行体1−1乃至1−N)との間で行う通信を制御する。例えば、飛行状況に関する情報の送受信の制御を実行する。
The
The
The
The
ドライブ90には、必要に応じて、リムーバブルメディア101が適宜装着される。ドライブ90によってリムーバブルメディア101から読み出されたプログラムは、必要に応じて記憶部88にインストールされる。また、リムーバブルメディア101は、記憶部88に記憶されている各種データも、記憶部88と同様に記憶することができる。
A
図4は、図1の小型飛行システムのうち、着陸誘導ポート装置2のハードウェアの構成を示すブロック図である。
FIG. 4 is a block diagram showing a hardware configuration of the landing
着陸誘導ポート装置2は、CPU51と、ROM52と、RAM53と、バス54と、入出力インターフェース55と、入力部56と、出力部57と、記憶部58と、ネットワーク通信部59と、近距離無線通信部60と、充放電部61と、発光部62と、着陸検出部63と、GPS部64と、ドライブ65とを備えている。
The landing
CPU51は、ROM52に記録されているプログラム、又は、記憶部58からRAM53にロードされたプログラムに従って各種の処理を実行する。
RAM53には、CPU51が各種の処理を実行する上において必要なデータ等も適宜記憶される。
The
The
CPU51、ROM52及びRAM53は、バス54を介して相互に接続されている。このバス54にはまた、入出力インターフェース55も接続されている。入出力インターフェース55には、入力部56と、出力部57と、記憶部58と、ネットワーク通信部59と、近距離無線通信部60と、充放電部61と、発光部62と、着陸検出部63と、GPS部64と、ドライブ65が接続されている。
The
入力部56は、キーボード等により構成され、各種情報を入力する。
出力部57は、ディスプレイやスピーカ等で構成され、画像や音声等の各種情報を出力する。
記憶部58は、ハードディスクやDRAM等で構成され、各種データを記憶する。
ネットワーク通信部59は、ネットワークNを介して別装置(本実施形態では主に図1に記載のポートID登録者所持装置4乃至6)との間で行う通信を制御する。
The
The
The
The
近距離無線通信部60は、近距離を飛行している小型飛行体1と無線通信をする。
The short-range
充放電部61は、着陸誘導ポート装置2及び小型飛行体1の駆動に必要な電力を放電するバッテリ(図示せず)に対して、所定の電源から供給されてくる電力を用いて充電をすると共に、小型飛行体1が着陸誘導ポート装置2に着陸した時に、小型飛行体1の充電部24(図2)に対し放電をする。
The charging / discharging
発光部62は、LEDランプ等で構成され、通常着陸を試みる小型飛行体1に対して、着陸誘導ポート装置2の場所を示す様に発光する。
め
The
Me
着陸検出部63は、小型飛行体1が着陸誘導ポート装置2に着陸したことを検出する。
GPS部64は、アンテナを含み複数のGPS用衛星からのGPS信号を受信して、当該GPS信号から着陸誘導ポート装置2の現在位置(緯度、経度)を示す位置情報を取得する。
The
The
ドライブ65には、必要に応じて、リムーバブルメディア71が適宜装着される。ドライブ65によってリムーバブルメディア71から読み出されたプログラムは、必要に応じて記憶部58にインストールされる。また、リムーバブルメディア71は、記憶部58に記憶されている各種データも、記憶部58と同様に記憶することができる。
A
図5は、図1の小型飛行システムのうち、サーバ2が小型飛行体1を管理する管理装置として機能する場合における、小型飛行体1とサーバ3との機能的構成を示す機能ブロック図である。
FIG. 5 is a functional block diagram illustrating a functional configuration of the
小型飛行体1のCPU11(図2)においては、図5に示すように、送信制御部211と、位置情報取得部212と、飛行駆動監視部213とが機能する。
In the CPU 11 (FIG. 2) of the
サーバ3のCPU81(図3)においては、図5に示すように、取得部311と、認証部312と、監視部313と、警告部314とが機能する。
記憶部88の一領域には、飛行体DB321と、空路DB322とが設けられている。
In the CPU 81 (FIG. 3) of the
A flying
小型飛行体1において、飛行体ID記憶部201には、上述した様に、小型飛行体1に付された飛行体IDが記憶されている。
送信制御部211は、小型飛行体1の飛行中等に、飛行体ID記憶部201に記憶された飛行体IDを抽出して、当該飛行体IDを通信部202から無線送信することを制御する。
In the
The
サーバ3において、取得部311は、飛行物体から送信された情報を、通信部89を介して取得する。
ここで、飛行体DB321には、小型飛行体1−1乃至1−Nの夫々の飛行体IDが記憶されている。
そこで、認証部312は、取得部311に取得された情報に飛行体IDが含まれている場合、飛行体DB321にアクセスして、当該飛行体IDと一致しているものを検索し、取得部311に取得された情報を送信した飛行物体を、当該飛行体IDから特定される小型飛行体1であるとして認証する。
監視部313は、このような認証部312の認証結果に基づいて、小型飛行体1−1乃至1−Nの夫々の飛行状況を監視する。
In the
Here, the flying
Therefore, if the information acquired by the
The
さらに本実施形態の小型飛行体1においては、位置情報取得部212は、当該小型飛行体1の現在位置を示す位置情報をGPS部17から取得する。
そこで、本実施形態の送信制御部211は、小型飛行体1の飛行体IDと共に、さらに当該小型飛行体1の位置情報を送信する制御を実行する。
Furthermore, in the
Therefore, the
この場合、サーバ3の監視部は、認証部312により認証された当該小型飛行体1の現在位置を、当該小型飛行体1から送信される位置情報に基づいて特定することで、当該小型飛行体1の飛行状況を監視することができる。
In this case, the monitoring unit of the
詳細については図9及び図10を参照して後述するが、小型飛行体1−1乃至1−Nの夫々が飛行可能な空路が予め決まっており、当該空路の情報が空路DB322に記憶されている。
Although details will be described later with reference to FIGS. 9 and 10, air routes on which the small aircrafts 1-1 to 1-N can fly are determined in advance, and information on the air routes is stored in the
そこで、監視部313は、さらに、認証部312により認証された当該小型飛行体1の現在位置が、予め決められた空路に入っているか否かを判断することで、当該飛行物体1の飛行状況を監視する。
Therefore, the
ここで、小型飛行体1−1乃至1−Nのうち、監視部313により空路から外れた小型飛行体1が存在すると監視された場合、警告部314は、当該小型飛行体1に対する警告を発する。
Here, when it is monitored by the
警告を発する手法は、特に限定されず、例えば、警告音等をサーバ3の出力部86から出力する手法を採用してもよいし、警告メッセージ等を通信部89を介して、空路から外れた小型飛行体1に対して直接無線送信する手法を採用してもよいし、これらの手法を組合せてもよい。
The method of issuing a warning is not particularly limited. For example, a method of outputting a warning sound or the like from the
小型飛行体1において、飛行駆動監視部213は、例えばモータの回転駆動の状態を監視することで、小型飛行体1の飛行用の駆動を開始したか否かを監視する。
送信制御部211は、飛行駆動監視部213により飛行用の駆動の開始が監視されたことをトリガとして、飛行体IDや位置情報の送信を開始する制御を実行する。
In the
The
図6は、図1の小型飛行システムの機能のうち、着陸誘導ポート装置2の誘導に従って小型飛行体1を着陸させる機能を発揮する場合における、着陸誘導ポート装置2と小型飛行体1との機能的構成を示す機能ブロック図である。
FIG. 6 shows the functions of the landing
着陸誘導ポート装置2のCPU51(図4)においては、図6に示すように、飛行体認証部411と、誘導電波送信制御部412と、報知制御部413と、発光制御部414とが機能する。
記憶部58の一領域には、飛行体DB321と、ポートDB422とが設けられている。
In the CPU 51 (FIG. 4) of the landing
In one area of the
小型飛行体1のCPU11(図2)においては、図6に示すように、飛行体ID送信制御部211と、ポートID登録部214と、行先ポート認証部215と、ポートID描出部216と、ポートID確認部217と、行先設定部218とが機能する。
通信部182(図2)においては、着陸信号受信部191と、誘導電波受信部192とが機能する。
In the CPU 11 (FIG. 2) of the
In the communication unit 182 (FIG. 2), a landing
着陸誘導ポート装置2において、ポートIDDB422は、自己を一意に特定するものとして予め登録されている識別子を、ポートIDとして記憶する。
なお、図示はしないが、サーバ3においても、着陸誘導ポート装置2毎に、ポートIDと、設置位置を示す位置情報とが対応付けられて管理されている。
In the landing
Although not shown, the
誘導電波送信制御部412は、所定の電波(搬送波)に対して、ポートIDDB422に記憶されているポートIDを重畳する。そして、誘導電波送信制御部412は、ポートIDを重畳した所定の電波を、小型飛行体1を誘導して着陸させるための誘導電波として、誘導電波送信部162から送信させる制御を実行する。
The guided radio wave
一方で、小型飛行体1において、着陸誘導ポート装置2−1乃至2−Mのうち行先の着陸誘導ポート装置2のポートIDは、上述した様に、ユーザ等の操作により入力部181に入力される。ポートID登録部214は、行先の着陸誘導ポート装置2のポートIDを、行先ポートIDとして登録する。
On the other hand, in the
ここで、小型飛行体1の飛行中に着陸誘導ポート装置2からとの通信圏内に入った場合、誘導電波受信部192は、当該着陸誘導ポート装置2からの誘導電波を受信する。
ポートID抽出部216は、このようにして誘導電波受信部192において誘導電波が受信された場合、当該誘導電波からポートIDを描出する。
Here, when entering the communication area with the landing
When the induced radio
ポートID確認部217は、ポートID抽出部216により抽出されたポートIDが、ポートID登録部214により登録された行先ポートIDと一致するか否かを確認する。
The port
行先設定部218は、ポートID確認部217によりポートIDが行先ポートIDと一致することが確認された場合、当該ポートIDが重畳されていた誘導電波の送信位置、即ち当該誘導電波を送信している着陸誘導ポート装置2を行先に設定する。
飛行制御部16は、行先として設定された着陸ポート装置2(誘導電波の送信位置)に着陸させるように、小型飛行体1の飛行を制御する。
When the port
The
小型飛行体1は、上述のように、行先の着陸誘導ポート装置2との通信圏内に入ると、当該着陸誘導ポート装置2からの誘導電波に従って着陸するように飛行する。
As described above, when the small flying
一方、小型飛行体1は、行先の着陸誘導ポート装置2との通信圏外で飛行中の場合、誘導電波を受信することができないため、GPS部17からの位置情報と、行先の着陸誘導ポート装置2の位置情報とに基づいて、飛行する。
On the other hand, the
具体的には、行先設定部218は、ポートID確認部217によりポートIDが行先ポートIDと一致することが確認されるまでの間、GPS部17からの位置情報が示す現在位置と、行先ポートIDから特定される着陸誘導ポート装置2の位置との差分に基づいて、行先を設定する。飛行制御部16は、行先設定部218により設定された行先に向けて小型飛行体1を飛行させるように制御する。
Specifically, the
なお、本実施形態では、上述した様に各着陸ポート装置2毎に行先ポートIDと設置の位置とがサーバ3において管理されている。そこで、行先ポートIDから特定される着陸誘導ポート装置2の位置については、サーバ3から取得するものとする。
In the present embodiment, the destination port ID and the installation position are managed in the
ここで、着陸誘導ポート装置2は、誘導電波を常に送信していてもよいが、この場合、誘導電波を送信するための電力が常に必要になると共に、予期せぬ小型飛行体1も誘導電波に従って着陸してしまうおそれがある。
Here, the landing
そこで、本実施形態では、着陸誘導ポート装置2−1乃至2−M毎に、小型飛行体1−1乃至1−Nのうち着陸を許可するものを事前登録している。即ち、小型飛行体1−1乃至1−Nのうち着陸を許可するものの飛行体IDは、飛行体DB321に事前登録されている。
Therefore, in the present embodiment, for each of the landing guide port devices 2-1 to 2-M, the small aircrafts 1-1 to 1-N that permit landing are pre-registered. That is, the flying object ID of the small flying object 1-1 to 1-N that permits landing is pre-registered in the flying
一方、小体飛行体1は、飛行中には、上述した様に、自身の飛行体IDを送信している。即ち、送信制御部211は、飛行体ID記憶部201に記憶された飛行体IDを、通信部202を介して送信する制御を実行する。
On the other hand, the small flying
従って、飛行中に飛行体IDを送信している小型飛行体1が所定の着陸誘導ポート装置2の通信圏内に入ると、当該着陸誘導ポート装置2の飛行体ID受信部163は、当該小型飛行体1の飛行体IDを受信して、飛行体認証部411に供給する。
Therefore, when the small flying
飛行体認証部411は、このようにして飛行体ID受信部163に飛行体IDが受信された場合、当該飛行体IDが飛行体DB321により事前登録(管理)されているものか否かを確認する。そして、飛行体認証部411は、管理されていると確認したとき、当該飛行体IDを送信する小型飛行体1を着陸対象として認証する。
When the flying object
導電波送信制御部412は、飛行体認証部411により着陸対象として小型飛行体1が認証されたことをトリガとして、誘導電波の送信の制御を開始する。
The conductive wave
つまり、着陸対象として着陸誘導ポート装置2に許可された小型飛行体1が通信圏内に飛行してきた場合にのみ、誘導電波は送信され、それ以外の場合には誘導電波の送信は停止される。これにより、着陸誘導ポート装置2の小電力が図れると共に、許可されていない飛行物体の予期せぬ着陸を防止することができる。
That is, the induced radio wave is transmitted only when the small flying
着陸誘導ポート装置2の報知制御部413は、飛行体認証部411により着陸対象として小型飛行体1が認証された場合、当該小型飛行体が着陸圏内に入った旨を報知する制御を実行する。
When the flying
ここで、報知の制御は、特に限定されず、例えば、小型飛行体1が間もなく到着する旨を音声等で出力部57から出力するような制御を採用してもよいし、その旨をネットワーク通信部59を介して、ポートID登録者所持装置4乃至6等に送信する制御、換言すると別装置と通信の制御をして当該別装置から報知内容を出力するような制御を採用してもよいし、これらの手法を組合せてもよい。
Here, the control of the notification is not particularly limited. For example, control that outputs from the
ここで、着陸誘導ポート装置2の着陸検出部63は、上述した様に、着陸対象の小型飛行体1が着陸誘導ポート装置2に着陸したことを検出する。
そこで、報知制御部43は、さらに、着陸検出部63により小型飛行体1の着陸が検出された場合、当該小型飛行体の着陸を報知する制御を実行する。
Here, the
Therefore, when the
着陸検出部63の検出信号、即ち、着陸対象の小型飛行体1が着陸誘導ポート装置2に着陸したことを示す信号(以下、「着陸信号」と呼ぶ)は、着陸誘導ポート装置2の着陸検出部63から着陸信号送信部161から送信されて、当該小型飛行体1の着陸信号受信部191に受信される。
The detection signal of the
小型飛行体1の運搬物収容部22は、上述した様に、運搬物を施錠して収容し、着陸誘導ポート装置2の着陸の検出という要件を少なくとも含む1以上の要件を満たした場合、施錠を解除する。即ち、着陸信号が着陸信号受信部191に受信されて運搬物収容部22に供給された場合、「着陸誘導ポート装置2の着陸の検出という要件」は満たされたことになるので、その他の要件を満たすこと(例えば正確な暗号キーが入力される等)を条件として、運搬物の施錠が解除される。
As described above, the transport
ここで、着陸誘導ポート装置2の充放電制御部は、所定の電源(図示せぬ)から充放電部61に充電をする制御を実行すると共に、着陸した小型飛行体1に対して電力を供給するために充放電部61を放電させる制御を実行する。
Here, the charging / discharging control unit of the landing
図7は、図1の小型飛行システムのうち、小型飛行体1の飛行体ID制御部20の外観の例を示す模式図である。
FIG. 7 is a schematic diagram showing an example of the appearance of the flying object
図7に示すとおり、飛行体ID制御部20は、小型飛行体1に着脱可能であり、装着方法は、特に限定されることはなく、例えば、紐等による巻き付け、接着剤を用いた貼付、ネジを用いた取り付け等の方法がある。
As shown in FIG. 7, the flying object
上述したように、飛行体ID制御部20は、付与された飛行体IDを記憶し、また送信する機能を有するため、あらゆる飛行物体に装着させることにより、当該飛行物体を小型飛行体1としてサーバ3の管理下に置くことができる。
As described above, since the flying object
この技術の適用例として、公道を走る自動車にナンバー登録が義務付けられていることで陸路の交通安全が担保されているのと同様に、空路を飛行する小型飛行体1に飛行体IDの付与を義務付け、空路の交通安全を担保することも実現可能となる。
As an application example of this technology, the vehicle ID on the public road is required to register the number of vehicles, so that the land vehicle traffic safety is ensured in the same way that the vehicle ID is assigned to the
また、自動車の登録ナンバーと同様に、目視による飛行体IDの識別を可能とするため、飛行体ID制御部20には、飛行体IDが印字されたプレート203を取り付けることもできる。
Further, like the vehicle registration number, in order to enable visual identification of the flying object ID, the flying object
さらに、自動車のナンバー登録と同様に、小型飛行体1の使用目的、大きさ、搭載機能、飛行能力等により飛行体IDに種別を設け、必要に応じて免許制を設けて、サーバ3で個別管理することもできる。
Furthermore, as with the registration of automobile numbers, the aircraft ID is classified according to the purpose of use, size, installed function, flight capability, etc. of the
図8は、図1の小型飛行システムのうち、小型飛行体1と、サーバ3との間における接続関係を示す模式図である。
FIG. 8 is a schematic diagram showing a connection relationship between the
図8に示すとおり、飛行体ID制御部20を備える小型飛行体1は、飛行体IDをサーバ3に送信する。
このとき、小型飛行体1は、モータの駆動の開始に合わせて飛行体IDを送信することとするため、常に飛行体IDを送信し続けるとした場合に比して電力の消費を抑えることができる。
As shown in FIG. 8, the
At this time, since the
サーバ3は、小型飛行体1から受信した情報に基づき小型飛行体1を監視して管理する。
小型飛行体1とサーバ3との間で使用される電波の周波数は、携帯電話の周波数と同じにすることができる。これにより、全国に網羅された携帯電話の基地局を利用することができることになり、サーバ3は、全国規模での小型飛行体1の管理を行うことができる。
The
The frequency of the radio wave used between the
図9は、図1の小型飛行システムのうち、小型飛行体1が予め決められた空路9を飛行していることを示す模式図である。
FIG. 9 is a schematic diagram showing that, in the small flight system of FIG. 1, the
図9に示すとおり、小型飛行体1は、GPS用衛星8からのGPS信号を受信して、当該GPS信号から小型飛行体1の現在位置(緯度、経度)を示す位置情報を取得し、予め決められた空路9を逸脱しないように飛行する。
As shown in FIG. 9, the
このとき、サーバ3は、小型飛行体1が予め決められた空路9に入っているか否かを監視し、小型飛行体1が予め決められた空路9を外れた場合、小型飛行体1に対し警告を発する。
At this time, the
サーバ3からの警告を受けた小型飛行体1は、当該警告の内容に従って飛行制御を行い、必要に応じて緊急着陸に向けた動作を行う。
The
サーバ3は、空路9に関する情報と、小型飛行体1に関する情報を有機的に管理しているため、小型飛行体1に事故や故障が生じた場合に、当該小型飛行体1の特定と、事故等の発生場所の特定とを、素早く行うことができる。
Since the
図10は、図9に示す空路9の具体例を示す模式図である。
FIG. 10 is a schematic diagram showing a specific example of the
図10(A)乃至(C)に示すとおり、空路9は、任意の位置に設定することができる。また、空路9は、小型飛行体1同士が衝突や接触せずに飛行できるようにするため、自動車が走る公道と同様に、第1方向に飛行するための空路9Rと、第1方向とは逆方向の第2方向に飛行するための空路9Lとが、水平方向に並行するように配置することもできる。
As shown in FIGS. 10A to 10C, the
また、空路9は、図10(D)に示すとおり、空路9Rと空路9Lとが垂直方向に並行するように配置することもできる。
これにより、スペース的な制限で左右に空路9を確保できない場合においても、小型飛行体1が衝突や接触しないような空路9を設定することができる。
Moreover, the
Thereby, even when the
図11は、図1の小型飛行システムのうち、小型飛行体1が緊急着陸制御部23の制御に基づいて緊急着陸する際、その衝撃を緩和するために動作する保護部材の一例としてのパラシュート112aを示す模式図である。
即ち、緊急着陸制御部23は、小型飛行体1が緊急着陸に際し、パラシュート112aを開く制御を実行することができる。
なお、落下や緊急着陸時における危害を防ぐために、小型飛行体1の緩衝材113を巻き付けることもできる。
11 shows a
That is, the emergency
In addition, in order to prevent the danger at the time of a fall or emergency landing, the
図12は、図1の小型飛行システムのうち、小型飛行体1が緊急着陸制御部23の制御に基づいて緊急着陸する際、その衝撃を緩和するために動作する保護部材の一例であって図11とは異なる例のエアバッグ112bを示す模式図である。
即ち、緊急着陸制御部23は、小型飛行体1が緊急着陸に際し、図11のパラシュート112aの代わりに、エアバッグ112bを開く制御を実行することができる。
FIG. 12 is an example of a protective member that operates to mitigate the impact when the
That is, the emergency
このように、緊急着陸制御部23が、図11のパラシュート112a図12のエアバッグ112b等を動作させる制御を実行することで、小型飛行体1の落下時等における自機の損傷を緩和するだけでなく、当該落下等に伴い生じ得る二次被害(歩行者や建物への衝突等)を防止することもできる。
In this way, the emergency
図13は、図1の小型飛行システムにおいて、小型飛行体1が、離れて存在する地点Aと地点Bとの間を行き来することができることを示す模式図である。
地点Aには、所定のポートIDが付された着陸誘導ポート装置2(特に「着陸誘導ポート装置2−A」と呼ぶ)が配置されている。地点Bには、誘導ポート装置2−Aのものとは別のポートIDが付された着陸誘導ポート装置2(特に「着陸誘導ポート装置2−B」と呼ぶ)が配置されている。
そこで、小型飛行体1が地点Aに存在するときに着陸誘導ポート装置2−BのポートIDを行先ポートIDとして登録し、小型飛行体1が地点Aに存在するときに着陸誘導ポート装置2−BのポートIDを行先ポートIDとして登録することで、地点Aと地点Bとの間の小型飛行体1の行き来が可能になる。
ここで、GPSに基づく位置情報のみでは、着陸制御にメートル単位での誤差を伴うことから、誘導電波を用いる着陸誘導ポート装置2−Aと着陸誘導ポート装置2−Bとを採用することで、地点Aと地点Bとのの間に存在する障害物の影響を受けることなく、精度良く地点Aと地点Bとの間を行き来することができる。
FIG. 13 is a schematic diagram showing that in the small flight system of FIG. 1, the
At point A, a landing guide port device 2 (particularly referred to as “landing guide port device 2-A”) with a predetermined port ID is arranged. At point B, a landing guide port device 2 (particularly referred to as “landing guide port device 2-B”) to which a port ID different from that of the guide port device 2-A is assigned is arranged.
Therefore, the port ID of the landing guide port device 2-B is registered as the destination port ID when the small flying
Here, only the position information based on GPS involves an error in units of meters in landing control, so by adopting the landing guide port device 2-A and the landing guide port device 2-B that use a guide radio wave, It is possible to move back and forth between the point A and the point B with high accuracy without being affected by an obstacle existing between the point A and the point B.
図14は、図13に示した模式図の具体例を示した図である。
なお、図14の例では、小型飛行体1の着陸予定点として、地点Aと地点Bに加え、地点Cも設けられている。
地点Cには、誘導ポート装置2−A,2−Bの何れのものとは別の所定のポートIDが付された着陸誘導ポート装置2(特に「着陸誘導ポート装置2−C」と呼ぶ)が配置されている。
具体的には図14の例では、着陸誘導ポート装置2−AのポートID114としては、「0123」が付されている。着陸誘導ポート装置2−BのポートID114としては、「0124」が付されている。着陸誘導ポート装置2−CのポートID114としては、「0125」が付されている。
一方、小型飛行体1は、行先の着陸誘導ポート装置2のポートID114を、行先ポートID115として登録して、飛行している。図4の例では、行先ポートID115として「0123」が登録されている。即ち、図4の例では、小型飛行体1の行先は着陸ポート装置2−Aである。
従って、小型飛行体1は、着陸誘導ポート装置2−A乃至2−Cのうち行先の着陸誘導ポート装置2の通信圏内まで飛行すると、当該着陸誘導ポート装置2から送信された誘導電波に重畳されたポートID114と、行先ポートID115が「0123」で一致することを確認する。すると、小型飛行体1は、誘導電波に従って、行先の当該着陸誘導ポート装置2−Aに着陸する。
FIG. 14 is a diagram showing a specific example of the schematic diagram shown in FIG.
In addition, in the example of FIG. 14, in addition to the point A and the point B, the point C is also provided as a scheduled landing point of the
At the point C, the landing
Specifically, in the example of FIG. 14, “0123” is assigned as the
On the other hand, the small flying
Therefore, when the small flying
図15は、図14に示した具体例において、小型飛行体1の通常着陸制御部18の入力部181に、行先ポートID115を入力できることを示す模式図である。
図15の例では、入力部181はテンキーで構成されている。ユーザ等は、このテンキーを押下操作することで、行先ポートID115として「0123」を入力することができる。
このとき、行先ポートID115として入力された「0123」は表示部183に表示される。
なお、通常着陸制御部18の入力部181は、行先ポートID115の入力機能の他に、運搬物収容部22の施錠及び解錠をさせるための暗証番号を入力する機能を備えるようにしてもよい。
また、小型飛行体1に行先ポートID115を登録する手法は、入力部18(テンキー)から直接入力する手法に限られず、ポートID登録者所持装置4乃至6からの間接的に入力する手法を採用することも可能である。
FIG. 15 is a schematic diagram showing that the
In the example of FIG. 15, the
At this time, “0123” input as the
In addition, the
Further, the method of registering the
図16は、図14に示した具体例において、小型飛行体1が自動的に飛び交う地点A乃至Cの夫々を模式的に示した図である。
FIG. 16 is a diagram schematically showing each of the points A to C where the
小型飛行体1は、上述したように、地点A乃至Cの夫々の間を自動的に飛び交うことができる。
具体的には例えば、小型飛行体1が、ポートID114が「0123」である着陸誘導ポート装置2−Aの着陸圏内に入ると、着陸誘導ポート装置2−Aは、ポートID登録者所持装置5及び6に対して到着の報知を行う。これによりポートID登録者所持装置5及び6を所持するユーザ等は、小型飛行体1の到着を事前に知ることができる。
その後、小型飛行体1が誘導電波に従って着陸誘導ポート装置2−Aに着陸した場合、ユーザ等は、次の行先の行先ポートIDとして例えば「0124」を小型飛行体1に登録する。
ここで、着陸誘導ポート装置2−Aの充放電部61は、太陽光パネル500からの電力を用いて、充電する。そこで、必要に応じて、小型飛行体1は、着陸誘導ポート装置2−Aの充放電部61からの放電を受けて、自機の充電部24に充電することができる。
充電完了後、小型飛行体1は、ポートIDとして「0124」を持つ着陸誘導ポート装置2−Bの位置情報を取得して、GPS信号から得られる自機の現在の位置情報に基づいて、着陸誘導ポート装置2−Bに向かって飛行する。
小型飛行体1が、着陸誘導ポート装置2−Bの通信圏内まで飛行すると、当該着陸誘導ポート装置2からの誘導電波に重畳されたポートIDの「0124」と、行先ポートIDの「0124」が一致することを確認する。すると、小型飛行体1は、誘導電波に従って、行先の当該着陸誘導ポート装置2−Bに着陸する。
As described above, the
Specifically, for example, when the
Thereafter, when the
Here, the charging / discharging
After the completion of charging, the
When the small flying
このような一連の処理が各地点A乃至Cにおいて実行されることで、小型飛行体1は、地点A乃至Cの夫々の間を効率的に飛び交うことができる。
By executing such a series of processes at the points A to C, the
ここで、小型飛行体1の各地点A乃至Cへの着陸については、小型飛行体1の着陸誘導ポート装置2−A乃至2−Cの誘導電波を用いることで、精度良い着陸が可能になる。
さらに本実施形態では小型飛行体1がカメラ部21を備えているので、カメラ部21により撮影された着陸地点A乃至Cの撮像画像を用いることで、各地点A乃至Cの着陸をより一段と精度良く行うことができる。
ただし、夜間や悪天候の場合、撮像画像に各地点A乃至Cが写り込まないため、各地点A乃至Cの指標としての発光部62が配置されている。
Here, with respect to landing of the
Furthermore, in this embodiment, since the
However, in the case of nighttime or bad weather, since the points A to C are not reflected in the captured image, the
図17は、各地点A乃至Cの指標の具体例としての、LEDランプ62aとアルミ反射板62bとを示した図である。
LEDランプ62aは、発光制御部414(図6)の制御により自主的に発光する。アルミ反射板62bは、外部からの光(例えば小型飛行体1からの光)を反射することで発光する。
FIG. 17 is a diagram showing an
The
なお、発光部62は、各地点A乃至Cの着陸地点としての指標だけでなく、各地点A乃至Cの領域内で小型飛行体1が飛行する場合における、領域の指標として採用することができる。
図18は、各地点A乃至Cの領域内で小型飛行体1が飛行する場合における、領域の指標の配置例を示した図である。
図18(A)に示すように、着陸誘導ポート装置2が配置された地点の領域のエッジに発光部62を配置し、小型飛行体1がカメラ部21で当該領域を撮像した結果得られる撮像画像に基づいて、図18(B)に示すように、小型飛行体1が、発光部62が囲む領域から逸脱することなく飛行することができる。
例えばこの領域が畑ならば、発光部62を、畑を囲むように配置すれば、小型飛行体1が、この畑内を逸脱しないように飛行して、種や農薬等を自動的に撒いて戻ってくるということもできる。
The
FIG. 18 is a diagram illustrating an example of the arrangement of the region indices when the small flying
As shown in FIG. 18A, an image obtained as a result of the
For example, if this region is a field, if the
このように、本発明に係る小型飛行体1と着陸誘導ポート装置2とを含む飛行システムは、荷物の運搬のみならず、各種各様の用途で用いることができる。
例えば、人間が行くことができない場所や行きにくい場所に着陸誘導ポート装置2や発光部62等を配置しておくことで、小型飛行体1を警備やパトロール等にも利用することができる。具体的には例えば、原始力発電所、重要施設、ビル周辺、建設現場、監視カメラのない地域、遭難時の捜索等に、本発明が適用される飛行システムを適用することができる。
また例えば、カメラ、音声収集機、マイク等を装着した小型飛行体1を利用することにより、監視カメラや警備員による巡回の代わりに、小型飛行体1から送信される監視映像等を確認することにより、効率的な警備やパトロールを行うことができる。
さらに、空路9上に、着陸誘導ポート装置2を、小型飛行体1の航続可能距離に合わせて配置することにより、より広範囲な飛行が可能となる。これにより、各種各様な用途に、本発明が適用される飛行システムを容易に適用することができる。
Thus, the flight system including the
For example, the small flying
In addition, for example, by using the
Furthermore, by placing the landing
以上、本発明の一実施形態について説明したが、本発明は、上述の実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。 Although one embodiment of the present invention has been described above, the present invention is not limited to the above-described embodiment, and modifications, improvements, and the like within the scope that can achieve the object of the present invention are included in the present invention. It is.
例えば図5及び6の機能的構成は例示に過ぎず、特に限定されない。即ち、上述した一連の処理を全体として実行できる機能が情報処理システムに備えられていれば足り、この機能を実現するためにどのような機能ブロックを用いるのかは、特に図5及び6の例に限定されない。 For example, the functional configurations of FIGS. 5 and 6 are merely examples, and are not particularly limited. That is, it is sufficient that the information processing system has a function capable of executing the above-described series of processes as a whole. What functional blocks are used to realize this function are particularly shown in the examples of FIGS. It is not limited.
また、機能ブロックの存在場所も、図5及び6に限定されず、任意でよい。
また、1つの機能ブロックは、ハードウェア単体で構成してもよいし、ソフトウェア単体で構成してもよいし、それらの組み合わせで構成してもよい。
Further, the location of the functional block is not limited to that shown in FIGS. 5 and 6 and may be arbitrary.
In addition, one functional block may be constituted by hardware alone, software alone, or a combination thereof.
各機能ブロックの処理をソフトウェアにより実行させる場合には、そのソフトウェアを構成するプログラムが、コンピュータ等にネットワークや記録媒体からインストールされる。
コンピュータは、専用のハードウェアに組み込まれているコンピュータであってもよい。また、コンピュータは、各種のプログラムをインストールすることで、各種の機能を実行することが可能なコンピュータ、例えばサーバの他汎用のスマートフォンやパーソナルコンピュータであってもよい。
When the processing of each functional block is executed by software, a program constituting the software is installed on a computer or the like from a network or a recording medium.
The computer may be a computer incorporated in dedicated hardware. The computer may be a computer capable of executing various functions by installing various programs, for example, a general-purpose smartphone or personal computer other than a server.
このようなプログラムを含む記録媒体は、ポートID登録者にプログラムを提供するために装置本体とは別に配布される、図示せぬリムーバブルメディアにより構成されるだけではなく、装置本体に予め組み込まれた状態でポートID登録者に提供される記録媒体等で構成される。 The recording medium including such a program is not only constituted by a removable medium (not shown), which is distributed separately from the apparatus main body in order to provide the program to the port ID registrant, but is preinstalled in the apparatus main body. It consists of a recording medium provided to the port ID registrant in the state.
なお、本明細書において、記録媒体に記録されるプログラムを記述するステップは、その順序に添って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的或いは個別に実行される処理をも含むものである。 In the present specification, the steps for describing the program recorded on the recording medium are not limited to the processing performed in time series according to the order, but may be performed in parallel or individually even if not necessarily performed in time series. The process to be executed is also included.
また、本明細書において、システムの用語は、複数の装置や複数の手段等より構成される全体的な装置を意味するものである。 Further, in the present specification, the term “system” means an overall apparatus composed of a plurality of devices, a plurality of means, and the like.
以上まとめると、本発明が適用される小型飛行システムは、次のような技術を実現することが可能になる。 In summary, the small flight system to which the present invention is applied can realize the following technology.
例えば、小型飛行体1は、着陸誘導ポート装置2に着陸後、着陸誘導ポート装置2の充放電部61を充電部24に自動的に接続して充電を行い、その後、次の行先(新たに登録したポートIDに対応する着陸誘導ポート装置2)に向かって自動的に出発することができる。
これにより、複数の到着誘導ポート装置2の夫々を小型飛行体1の充電のための各中継地点として用いることができる。
その結果、小型飛行体1が最初に離陸した着陸誘導ポート装置2に戻ることなく再充電を重ね、長距離飛行をすることができる。つまり、複数の着陸誘導ポート装置2を各中継地点に夫々配置することにより、小型飛行体1の飛行距離を自在に延長することができる。この場合、小型飛行体1の予備バッテリーを大量に用意する必要がなくなる。
For example, after landing on the landing
Accordingly, each of the plurality of arrival
As a result, it is possible to carry out a long-distance flight by repeating recharging without returning to the landing
ここで、各中継地点となり得る着陸誘導ポート装置2は、陸上と海上とを問わずに任意の場所に設置をすることができる。海上に設置する場合には、例えば、船舶に着陸誘導ポート装置2と太陽光パネルとを設置し、当該太陽光パネルにより着陸誘導ポート装置2を充電することができる。
この場合、小型飛行体1は、上述した様に着陸誘導ポート装置2の充放電部61を充電部24に自動的に接続して充電を行うことができる。このとき、着陸誘導ポート装置2が設置された船舶が転覆しないように、当該船舶に浮標を取り付けてもよい。
さらに、着陸誘導ポート装置2は、GPS機能を備えることができるため、当該船舶を海上で停泊させるための錨の長さが足りない場合であっても、当該船舶の停泊位置を、修正しながら一定の範囲内に保つことができる。
また、着陸誘導ポート装置2には、小型飛行体1を格納するための格納庫を取り付けてもよい。当該格納庫は、センサによる自動開閉扉を設けることもできる。これにより、着陸誘導ポート装置2を設置した船舶を、小型飛行体1の航空母艦のように用いることができる。
このように、船舶と到着誘導ポート装置2とを組み合わせて、小型飛行体1の航空母艦のように用いることにより、漁業、密漁監視、離島への物資輸送、海難事故の捜索、海上における気象情報や水温の調査等について、本発明が適用される小型飛行システムを有効に活用することができる。
Here, the landing
In this case, the
Furthermore, since the landing
In addition, a hangar for storing the small flying
In this way, by combining the ship and the arrival
また例えば、小型飛行体1の消費電力は、風向きや風力等の飛行環境の影響を受ける。そこで、小型飛行体1に風力センサを取り付けてもよい。これにより、小型飛行体1は、一定の風力以上に達したことを風力センサが検出した場合には緊急着陸し、その後一定の風力以下になったことを風力センサが検出した場合は再出発することができる。このようにして、小型飛行体1の消費電力を抑制することができる。
Further, for example, the power consumption of the
また例えば、小型飛行体1は、何らかの事情によりGPSを使用することができない場合に備えて、超音波センサを取り付けてもよい。これにより、小型飛行体1は、他の飛行物体や建物等への衝突を回避することができる。
Further, for example, the
また例えば、小型飛行体1に、カメラ部21に加えてさらに、集音マイクロフォンを取り付けるようにしてもよい。例えば、災害時において、小型飛行体1のカメラ部21による映像のみでは把握しきれいない状況を、小型飛行体1の集音マイクロフォンが集音した音声で補完することができる。
さらに、小型飛行体1にスピーカをさらに取り付けるようにしてもよい。これにより、カメラ部21により上空から撮影された映像と、集音マイクロフォンにより集音された音声との各データに基づいて、上空に存在する小型飛行体1は、スピーカから避難誘導の呼びかけを行うことができる。
さらにまた、小型飛行体1に発光体を取り付けるようにしてもよい。これにより、夜間における避難誘導時も、当該発光体をサーチライトとして使用することができる。
For example, in addition to the
Further, a speaker may be further attached to the
Furthermore, a light emitter may be attached to the
また例えば、着陸誘導ポート装置2は、何らかの事情によりGPSや誘導電波を使用することができない場合に備えて、超音波センサや、小型飛行体1を誘導するためのレーザー出力装置を取り付けるようにしてもよい。これにより、GPS、誘導電波、超音波センサ、及びレーザー出力装置が相互に補完し合うことができるので、小型飛行体1を着陸誘導ポート装置2により確実に着陸させることができる。
In addition, for example, the landing
また例えば、着陸誘導ポート装置2や空路9に隣接する任意の場所にICタグを一定間隔で配置し、小型飛行体1にICタグリーダを取り付けるようにしてもよい。これにより、小型飛行体1は、一定間隔で配置されたICタグの情報を読み取りながら、空路9や着陸誘導ポート装置2に従って正確な経路で飛行することがより確実にできる。
Further, for example, IC tags may be arranged at predetermined intervals in any place adjacent to the landing
また例えば、サーバ3は、携帯電話の基地局を利用することにより、世界中の都市や郊外で自由に行き来する小型飛行体1の飛行体IDを、携帯電話の基地局及びインターネット経由で即時かつ容易に取得することができるので、これらの小型飛行体1をリアルタイムで容易に管理することができる。
これにより、サーバ3は、携帯電話の回線数と同様に、数百万の小型飛行体1を管理することができる。
In addition, for example, the
As a result, the
また、サーバ3は、小型飛行体1の発生音を集音マイクロフォンで集音し、その集音した音声データを、当該小型飛行体1の飛行体ID毎にデータベース上に記憶させ、蓄積することができる。
そして、サーバ3は、飛行物体の発生音を解析し、解析した発生音と、予め蓄積されたN台の小型飛行体1−1乃至1−Nの各音の夫々とを照合する。これにより、サーバ3は、飛行物体が、照合した飛行体IDを有する小型飛行体1であると特定することができる。その結果、サーバ3は、当該飛行物体が行先に到着する前に、当該行先の近傍等において、当該飛行物体の接近を報知することもできる。
なお、報知の手法は、特に限定されず、例えば、メールやSNS等によりポートID登録者所持装置4乃至6に報知する手法を採用してもよい。
このような報知の例としては、例えば、小型飛行体1を利用したデリバリーの到着の報知を想定することができる。
また、盗難された小型飛行体1の捜索のための手段の1つとして報知することもできる。
ここで、小型飛行体1の発生音を飛行体IDと対応付けて登録することにより、盗難された小型飛行体1の飛行体IDの再登録を防止することもできる。
The
Then, the
The notification method is not particularly limited, and for example, a method of notifying the port ID registrant possessing devices 4 to 6 by e-mail or SNS may be employed.
As an example of such notification, for example, notification of arrival of delivery using the
Moreover, it can also alert | report as one of the means for the search of the stolen
Here, by registering the sound generated by the
また例えば、地図を方眼紙のように区分けし、夫々の升目毎に任意のコード番号を付与したデジタルマップを作成し、当該デジタルマップを、小型飛行体1やポートID登録者所持装置4乃至6に記憶させてもよい。これにより、当該升目毎に付与されたコード番号を行先として小型飛行体1に記憶させるだけで、小型飛行体1の行先を設定することができる。
つまり、行先として、着陸誘導ポート装置2のポートIDのみならず、任意の場所を設定することができる。
Further, for example, the map is divided like a graph paper, a digital map is created with an arbitrary code number assigned to each square, and the digital map is stored in the
That is, as a destination, not only the port ID of the landing
さらに、小型飛行体1は、升目毎に付与されたコード番号を行先として設定しているのみならず、飛行中の現在位置確認に用いることもできる。
この場合、当該デジタルマップの各升目には、升目内の最も高い建物、地形の高さ、空間の幅等を数値で表示するようにしてもよい。これにより、小型飛行体1は、当該数値を読み取ることで、高度や空間幅を維持しながら飛行することができる。その結果、小型飛行体1は、GPSが使用できない地域、原子力発電所、工場、市中の限られた区域等であっても、当該デジタルマップを読み取りながら飛行することができる。
Furthermore, the
In this case, in each grid of the digital map, the tallest building in the grid, the height of the terrain, the width of the space, and the like may be displayed numerically. Thereby, the
図19は、小型飛行体1が用いるデジタルマップの一例を示す図である。
FIG. 19 is a diagram illustrating an example of a digital map used by the
図19の例のデジタルマップは、平面地図上に疑似的に被せられた状態で、用いられる。これにより、当該平面地図は、升目で区切られ、升目毎にコード番号が付されることになる。さらに、升目内の最も高い建物や地形の高さや幅などが数値で表示されることになる。
例えば、1列目A行の升目は、01乃至25に区分けされ、01の区分けには、高さ50メートルの建物等が存在することがわかる。
The digital map in the example of FIG. 19 is used in a state where it is put on a planar map in a pseudo manner. Thereby, the said plane map is divided | segmented by a square, and a code number is attached | subjected for every square. In addition, the tallest building in the grid and the height and width of the terrain are displayed numerically.
For example, the grid in the first column and the A row is divided into 01 to 25, and it can be seen that a building having a height of 50 meters exists in the division of 01.
また、デジタルマップの各升目の大きさは、任意に拡大又は縮小することができる。
例えば、小型飛行体1の出発時の升目の大きさは、GPSの誤差内である50m×50mとし、小型飛行体1が到着誘導ポート装置2の誘導電波の圏内に入った後は、升目の大きさを1m×1mに縮小してもよい。これにより、小型飛行体1は、建物、樹木、地形の高さや幅等の数値を読みながら飛行することができる。
Further, the size of each square of the digital map can be arbitrarily enlarged or reduced.
For example, the size of the cell at the time of departure of the
また、デジタルマップにおいて、航路9を事前に細かく設定することもできる。
これにより、小型飛行体1は、原子力発電所や工場等の施設の上空だけではなく、低空飛行による細かな見回り、確認作業、警備活動等を行うことができる。
In the digital map, the
Thereby, the
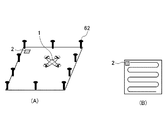
図20は、図1の小型飛行システムのうち、着陸誘導ポート装置2に複数の小型飛行体1を格納できる格納庫71を取り付けた場合の一例を示す図である。
FIG. 20 is a diagram illustrating an example of a case where a
図20の例の着陸誘導ポート装置2は、格納庫71の中に小型飛行体1を格納した状態で、小型飛行体1に対する充電を自動的に行うことができる。これにより、小型飛行体1は、充電後にいつでも出発することが可能になる。
The landing
また、格納庫71の表面には、太陽光発電のための太陽光パネル500を張り付けることができる。これにより、商用電源等が存在しない場所であっても小型飛行体1を着陸させ、着陸誘導ポート装置2のバッテリーを充電することができる。
このとき、図示しないバッテリーは、格納庫71の床下に格納することができる。
A
At this time, a battery (not shown) can be stored under the floor of the
また、格納庫71には、自動又は手動で開閉するドア72を取り付けることができる。当該ドア72は、開いた状態で着陸誘導ポート装置2を設置することができる。これにより、着陸誘導ポート装置2を複数設置するスペースに余裕を持たせることができる。なお、格納庫71に小型飛行体1を格納中に、他の複数の小型飛行体1が当該着陸誘導ポート装置2に着陸して来たとしても、小型飛行体1夫々は、サーバ3に一括管理されているため、他の小型飛行体1の影響を受けることなく飛行することができる。
In addition, a
また、着陸誘導ポート装置2には、小型飛行体1が着陸誘導ポート装置2に着陸する場合に、風の影響等を受けて小型飛行体1が動くことを防ぐストッパー73を取り付けることができる。
The landing
また、格納庫71には、クレーン74を備えることができる。これにより、小型飛行体1を任意の位置に移動させることができる。
In addition, the
図21は、図1の小型飛行システムのうち、着陸誘導ポート装置2に、脚を有する着陸ボード90を取り付けた場合の一例を示す図である。
FIG. 21 is a diagram showing an example of a
図21の例の着陸誘導ポート装置2は、着陸ボード90の脚を固定することにより、地上、自動車の屋根や荷台、小型船上等に用いることができる。なお、バッテリー等を当該着陸ボード90の下部に格納することができる。
The landing
図22は、図1の小型飛行システムのうち、船舶に着陸誘導ポート装置2を設置することにより、当該船舶を小型飛行体1の航空母艦の様に使用する場合の例を示す図である。
FIG. 22 is a diagram illustrating an example in which the ship is used like an aircraft carrier of the
図22の例の着陸誘導ポート装置2は、太陽光発電のための太陽光パネル500を複数連結させ、その上に、格納庫71を取り付けた着陸誘導ポート装置2を設置する。これにより、着陸誘導ポート装置2は、太陽光パネル500から多くの電力の供給を受けることができる。また、敷き詰められた太陽光パネル500の端部には、太陽光パネル500を保護するためのネット91を取り付けることができる。
The landing
図23は、図1の小型飛行システムのうち、船舶を使用せずに着陸誘導ポート装置2を水面に設置する例を示した図である。
FIG. 23 is a diagram illustrating an example in which the landing
図23は、図1の小型飛行システムのうち、太陽光発電のための太陽光パネルを複数連結させ、連結された太陽光パネルの端部には、連結させた太陽光パネルが水に浮かぶようフロートを複数取り付け、連結された太陽光パネルの上に、格納庫を取り付けた着陸誘導ポート装置を設置した場合の一例を示した図である。これにより、船舶を使用しなくとも水上に着陸誘導ポート装置2を設置することができる。さらに太陽光発電による電力の供給を受けることができる。
23, a plurality of solar panels for photovoltaic power generation are connected in the small flight system of FIG. 1, and the connected solar panels float on the water at the ends of the connected solar panels. It is the figure which showed an example at the time of installing the landing guide port apparatus which attached the hangar on the solar panel which attached multiple floats and was connected. Accordingly, the landing
1、1−1、1−N・・・ 小型飛行体
2、2−1、2−A、2−B、2−C、2−M・・・ 着陸誘導ポート装置
3・・・ サーバ
4、5、6・・・ ポートID登録者所持装置
8・・・ GPS用衛星
9、9R、9L・・・ 空路
11、51、81・・・ CPU
12、52、82・・・ ROM
13、53、83・・・ RAM
14、54、84・・・ バス
15、55、85・・・ 入出力インターフェイス
16・・・ 飛行制御部
17・・・ GPS部
18・・・ 通常着陸制御部
19・・・ 記憶部
20・・・ 飛行体ID制御部
21・・・ カメラ部
22・・・ 運搬物収容部
23・・・ 緊急着陸制御部
24・・・ 充電部
25、65、90・・・ ドライブ
31、71、101・・・ リムーバブルメディア
56、87、181・・・ 入力部
57、86・・・ 出力部
58、88・・・ 記憶部
59・・・ ネットワーク通信部
60・・・ 近距離無線通信部
61・・・ 充放電部
62・・・ 指標
62a・・・ LEDランプ
62b・・・ アルミ反射板
63・・・ 着陸検出部
64・・・ GPS部
89、182、202・・・ 通信部
112a・・・ パラシュート
112b・・・ エアバッグ
113・・・ 緩衝材
114・・・ ポートID
115・・・ 行先ポートID
161・・・ 着陸信号送信部
162・・・ 誘導電波送信部
163・・・ 飛行体ID受信部
183・・・ 表示部
191・・・ 着陸信号受信部
192・・・ 誘導電波受信部
201・・・ 飛行体ID記憶部
203・・・ プレート
211・・・ 送信制御部
212・・・ 位置情報取得部
213・・・ 飛行駆動監視部
214・・・ ポートID登録部
215・・・ 行先認識部
216・・・ ポートID描出部
217・・・ ポートID確認部
218・・・ 行先設定部
311・・・ 取得部
312・・・ 認証部
313・・・ 監視部
314・・・ 警告部
321・・・ 飛行体DB
322・・・ 空路DB
411・・・ 飛行体認証部
412・・・ 誘導電波送信制御部
413・・・ 報知制御部
414・・・ 発光制御部
422・・・ ポートIDDB
500・・・ 太陽光パネル
N・・・ ネットワーク
71・・・ 格納庫
72・・・ ドア
73・・・ ストッパー
74・・・ クレーン
90・・・ 着陸ボード
91・・・ ネット
92・・・ フロート
DESCRIPTION OF
12, 52, 82 ... ROM
13, 53, 83 ... RAM
14, 54, 84 ...
115 ... Destination port ID
161 ...
322 ... Air DB
411 ...
500 ... Solar panel N ...
Claims (6)
前記N台の小型飛行体の夫々は、
自己を一意に特定するものとして予め登録されている識別子を、飛行体IDとして記憶する飛行体ID記憶部と、
前記飛行体IDの送信を制御する送信制御部と、
自己の飛行動作を制御する飛行制御部と、
を備え、
前記飛行制御部は、さらに、
自機の出発時と着陸誘導電波受信時とでサイズ変更可能な複数の升目によって区分けされた平面地図の前記升目毎に表示される、前記升目の範囲内で最も高い建物の高さと幅、地形の高さと幅、及び空間の幅を示す数値を読み取って自機の高度及び空間幅を維持することにより、前記建物及び前記地形を回避しながら飛行する制御を実行し、
前記管理装置は、
とある飛行物体から送信される情報を取得する取得部と、
前記取得部により取得された前記情報に何らかの識別子が含まれている場合、前記N台の小型飛行体毎の前記飛行体IDが記憶された所定のDBにアクセスして、当該識別子と一致している飛行体IDを検索し、前記飛行物体を、当該識別子と一致する飛行体IDから特定される小型飛行体であるとして認証する認証部と、
前記認証部の認証結果に基づいて、前記N台の小型飛行体の夫々の飛行状況を監視する監視部と、
を備える、
小型飛行システム。 In a small flight system having N small flying vehicles and a management device for managing the N small flying vehicles,
Each of the N small vehicles is
A vehicle ID storage unit for storing an identifier registered in advance as a vehicle ID to uniquely identify itself;
A transmission control unit for controlling transmission of the flying object ID;
A flight control unit that controls its own flight movement;
With
The flight control unit further includes:
The height and width of the tallest building within the range of the square and the topography displayed for each square on the plane map divided by multiple squares that can be resized at the time of departure of the aircraft and at the time of landing guidance reception height and width, and by maintaining a high degree and spatial width of its own I reading a number value indicating the width of the space, and executes a control to fly while avoiding the building and the terrain,
The management device
An acquisition unit for acquiring information transmitted from a certain flying object;
If any identifier is included in the information acquired by the acquisition unit, the predetermined ID in which the flying object ID is stored for each of the N small flying objects is accessed and matched with the identifier. An authentication unit that searches for a flying object ID and authenticates the flying object as a small flying object identified from a flying object ID that matches the identifier;
Based on the authentication result of the authentication unit, a monitoring unit that monitors the flight status of each of the N small aircrafts;
Comprising
Small flight system.
現在位置を示す位置情報を取得する位置情報取得部をさらに備え、
前記送信制御部は、前記飛行体IDと共に、さらに前記位置情報を送信する制御を実行し、
前記管理装置の前記監視部は、
前記認証部により所定の前記小型飛行体であると認証された前記飛行物体の現在位置を、当該飛行物体から送信される前記情報に含まれる前記位置情報に基づいて特定することで、当該飛行物体の飛行状況を監視する、
請求項1に記載の小型飛行システム。 In each of the N small vehicles,
It further includes a position information acquisition unit that acquires position information indicating the current position,
The transmission control unit executes control for transmitting the position information together with the flying object ID,
The monitoring unit of the management device includes:
By identifying the current position of the flying object that is authenticated by the authentication unit as the predetermined small flying object based on the position information included in the information transmitted from the flying object, the flying object To monitor the flight status of
The small flight system according to claim 1.
前記認証部により所定の前記小型飛行体であると認証された前記飛行物体の前記現在位置が、予め決められた空路に入っているか否かを判断することで、当該飛行物体の飛行状況を監視する、
請求項2に記載の小型飛行システム。 The monitoring unit further includes:
The flight status of the flying object is monitored by determining whether or not the current position of the flying object that has been authenticated as the predetermined small aircraft by the authentication unit is in a predetermined air route. To
The small flight system according to claim 2.
前記N台の小型飛行体のうち、前記監視部により前記空路から外れた小型飛行体が存在すると監視された場合、当該小型飛行体に対する警告を発する警告部をさらに備える、
請求項3に記載の小型飛行システム。 The management device
A warning unit that issues a warning to the small flying object when the monitoring unit monitors that there is a small flying object out of the air path among the N small flying objects;
The small flight system according to claim 3.
飛行用の駆動を開始したか否かを監視する飛行駆動監視部をさらに備え、
前記送信制御部は、前記飛行駆動監視部により前記飛行用の駆動の開始が監視されたことをトリガとして、前記飛行体IDの送信を開始する制御を実行する、
請求項1乃至4のうちいずれか1項に記載の小型飛行システム。 In each of the N small vehicles,
A flight drive monitoring unit for monitoring whether or not driving for flight has started;
The transmission control unit executes control to start transmission of the flying object ID triggered by the start of the flight drive being monitored by the flight drive monitoring unit.
The small flight system according to any one of claims 1 to 4.
緊急時における着陸を制御する緊急着陸制御部をさらに備える、
請求項1乃至5のうちいずれか1項に記載の小型飛行システム。 In each of the N small vehicles,
An emergency landing control unit for controlling landing in an emergency;
The small flight system according to any one of claims 1 to 5.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015156459A JP6285398B2 (en) | 2015-08-06 | 2015-08-06 | Small flight system |
| PCT/JP2016/072840 WO2017022805A1 (en) | 2015-08-06 | 2016-08-03 | Small aircraft flight system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015156459A JP6285398B2 (en) | 2015-08-06 | 2015-08-06 | Small flight system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017037368A JP2017037368A (en) | 2017-02-16 |
| JP6285398B2 true JP6285398B2 (en) | 2018-02-28 |
Family
ID=57944033
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015156459A Active JP6285398B2 (en) | 2015-08-06 | 2015-08-06 | Small flight system |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6285398B2 (en) |
| WO (1) | WO2017022805A1 (en) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SG11201807307VA (en) * | 2016-03-17 | 2018-09-27 | Airspace Systems Inc | System and method for aerial system discrimination and action |
| US10338609B2 (en) | 2017-03-31 | 2019-07-02 | T-Mobile Usa, Inc. | Authorizing drone access to fulfillment centers |
| CN110832276A (en) * | 2017-07-04 | 2020-02-21 | 三菱电机株式会社 | Flight control device, flight control system, and flight control method |
| JP6885894B2 (en) * | 2018-03-28 | 2021-06-16 | Kddi株式会社 | Containment equipment management equipment |
| JP7119652B2 (en) * | 2018-07-02 | 2022-08-17 | 株式会社リコー | flight system |
| JP7215706B6 (en) * | 2018-07-11 | 2023-02-14 | メトロウェザー株式会社 | Flight path calculation system, flight path calculation program, and unmanned aircraft path control method |
| JP2021000941A (en) * | 2019-06-24 | 2021-01-07 | 株式会社エアロジーラボ | Landing system of multi-copter |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001283400A (en) * | 2000-04-03 | 2001-10-12 | Nec Corp | Unmanned aircraft control system |
| JP3962403B2 (en) * | 2004-11-11 | 2007-08-22 | 川崎重工業株式会社 | Advanced computing device and method |
| US7603207B2 (en) * | 2005-05-03 | 2009-10-13 | The Boeing Company | Surrogate air processor |
| US8374776B2 (en) * | 2010-03-31 | 2013-02-12 | The Boeing Company | Methods and apparatus for indicating a relative altitude in one or more directions |
| IL218327A (en) * | 2012-02-26 | 2013-05-30 | Elbit Systems Ltd | Safe emergency landing of a uav |
-
2015
- 2015-08-06 JP JP2015156459A patent/JP6285398B2/en active Active
-
2016
- 2016-08-03 WO PCT/JP2016/072840 patent/WO2017022805A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017037368A (en) | 2017-02-16 |
| WO2017022805A1 (en) | 2017-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6203789B2 (en) | Small flight system | |
| JP6285398B2 (en) | Small flight system | |
| US11370541B2 (en) | Accident monitoring using remotely operated or autonomous aerial vehicles | |
| US20230186776A1 (en) | Unmanned aerial vehicle management | |
| US10950118B2 (en) | Modular sensing systems and methods | |
| KR102350058B1 (en) | rotorcraft landing gear | |
| US9973737B1 (en) | Unmanned aerial vehicle assistant for monitoring of user activity | |
| US20160196751A1 (en) | Unmanned aerial vehicle communication, monitoring, and traffic management | |
| EP3776108B1 (en) | Tracking stolen robotic vehicles | |
| CN105416584A (en) | Post-disaster life tracking unmanned aerial vehicle system | |
| JPH03502142A (en) | Guidance methods and devices for preventing major disasters and protecting the environment | |
| ES2327938T3 (en) | ERROR CONTROL IN AN AIR TRAFFIC MANAGEMENT SYSTEM. | |
| KR20170130934A (en) | Drone sky-highway building system and method of drone flight using the same | |
| US11260985B2 (en) | Detecting when a robotic vehicle is stolen | |
| CN115380316B (en) | Method and system for monitoring an object in the environment of an aircraft | |
| JP2006087035A (en) | Vehicle management system and vehicle management method | |
| RU2260209C1 (en) | Alarm signaling method including use of video surveillance | |
| Supria et al. | Early Warning System Integrated with Automatic Identification System for Ship Safety | |
| CN118486138A (en) | Mountain-based tourist attraction safety monitoring management system | |
| Kosmas | Secure tracking system for next generation CIT products |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170731 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180201 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6285398 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |