JP5719170B2 - 物体の位置及び運動検出システム、及び方法 - Google Patents
物体の位置及び運動検出システム、及び方法 Download PDFInfo
- Publication number
- JP5719170B2 JP5719170B2 JP2010525999A JP2010525999A JP5719170B2 JP 5719170 B2 JP5719170 B2 JP 5719170B2 JP 2010525999 A JP2010525999 A JP 2010525999A JP 2010525999 A JP2010525999 A JP 2010525999A JP 5719170 B2 JP5719170 B2 JP 5719170B2
- Authority
- JP
- Japan
- Prior art keywords
- ball
- camera
- image
- spin
- images
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 39
- 238000001514 detection method Methods 0.000 title description 2
- 238000005286 illumination Methods 0.000 claims description 14
- 238000005259 measurement Methods 0.000 description 28
- 240000007320 Pinus strobus Species 0.000 description 23
- 238000013459 approach Methods 0.000 description 23
- 238000004458 analytical method Methods 0.000 description 17
- 238000013461 design Methods 0.000 description 13
- 238000004364 calculation method Methods 0.000 description 11
- 238000002372 labelling Methods 0.000 description 10
- 230000000694 effects Effects 0.000 description 8
- 238000004422 calculation algorithm Methods 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 7
- 239000000463 material Substances 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000004088 simulation Methods 0.000 description 6
- 238000010561 standard procedure Methods 0.000 description 6
- 238000012544 monitoring process Methods 0.000 description 5
- 238000009826 distribution Methods 0.000 description 4
- 239000000284 extract Substances 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 238000000605 extraction Methods 0.000 description 3
- 238000010191 image analysis Methods 0.000 description 3
- 230000002452 interceptive effect Effects 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 238000007405 data analysis Methods 0.000 description 2
- 238000010304 firing Methods 0.000 description 2
- 238000003672 processing method Methods 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 238000009987 spinning Methods 0.000 description 2
- 108010014173 Factor X Proteins 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 150000001336 alkenes Chemical class 0.000 description 1
- 238000010835 comparative analysis Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 238000013523 data management Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- JRZJOMJEPLMPRA-UHFFFAOYSA-N olefin Natural products CCCCCCCC=C JRZJOMJEPLMPRA-UHFFFAOYSA-N 0.000 description 1
- 210000004197 pelvis Anatomy 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 238000012887 quadratic function Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000012384 transportation and delivery Methods 0.000 description 1
- 238000001429 visible spectrum Methods 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/36—Training appliances or apparatus for special sports for golf
- A63B69/3658—Means associated with the ball for indicating or measuring, e.g. speed, direction
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
- A63B24/0006—Computerised comparison for qualitative assessment of motion sequences or the course of a movement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0021—Tracking a path or terminating locations
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
- A63B24/0006—Computerised comparison for qualitative assessment of motion sequences or the course of a movement
- A63B2024/0012—Comparing movements or motion sequences with a registered reference
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0021—Tracking a path or terminating locations
- A63B2024/0028—Tracking the path of an object, e.g. a ball inside a soccer pitch
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0021—Tracking a path or terminating locations
- A63B2024/0028—Tracking the path of an object, e.g. a ball inside a soccer pitch
- A63B2024/0034—Tracking the path of an object, e.g. a ball inside a soccer pitch during flight
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/05—Image processing for measuring physical parameters
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/30—Speed
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/30—Speed
- A63B2220/34—Angular speed
- A63B2220/35—Spin
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/806—Video cameras
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/74—Miscellaneous features of sport apparatus, devices or equipment with powered illuminating means, e.g. lights
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B37/00—Solid balls; Rigid hollow balls; Marbles
- A63B37/0003—Golf balls
- A63B37/0022—Coatings, e.g. paint films; Markings
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B45/00—Apparatus or methods for manufacturing balls
- A63B45/02—Marking of balls
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/0002—Training appliances or apparatus for special sports for baseball
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biophysics (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
マーキングされたボールの運動を、較正された(calibrated)カメラで追跡する。ボールのマークは既定の関係を有していなければならず、また、飛行中のボールの画像は、既知の時間的関係を有するものでなければならない。カーブを基本とするマーキングを用いることが可能であって、またデータを3次元表面座標へとマッピングすることが可能である。既知の関係を有する複数の画像が、比較分析のために同一領域にて記録されている場合は、マーキングされていないボールを追跡することも可能である。
2つのカメラを用いて、ゴルフクラブの3Dエッジを取得する。軌道に沿ったゴルフボールの開始位置及びクラブフェイスの向きが記録される。打撃の瞬間が軌道から決定され、クラブがボールを打つ位置の計算値と、その打つ位置におけるクラブフェイスの向きが与えられる。クラブフェイスからの鏡面反射は、必要なデータ測定における好ましい一形式である。可視光又は赤外光を用いることができるのであって、また6軸軌道を決定するために、カメラによりクラブフェイス特徴のシルエットを記録するか、直接照射を記録することができる。
ゴルファーのスイング分析においては、モデルスイングと比較されるデータを記録するためにシルエットと複数のカメラとが用いられる。シルエットは、捕捉されたゴルファーのシルエットからのずれが最小であるようなモデルから生成される。ゴルファーのスイングのモデルが作成され、検討中であるスイングとマッチングされる。
クラブ、ゴルファー、及びボールの位置をパッティングシーケンスの全体に亘って捕捉することによってパタープロファイルを分析することも可能である。
幾つかの好ましい実施形態のうち第1の実施形態において、本発明は、以下に説明するようなマーキングされたボールの打ち上げ装置を提供する。ここにおいて「ボール」という用語は、運動するような興味ある物体のうち任意のものを表すために用いられるのであって、これに対して、本発明に従うシステム及び方法により位置及び運動のデータが生成される。
−システムの説明−
打ち上げモニタは、ボールに対する打ち上げデータを探し出すためのシステムである。それは、ボールの初期位置、ボールの初期3D軌道、及びボールのスピン軸とスピンレートからなる。
システムは、ボールの潜在的飛行経路の画像を作成するカメラのセット(全てのカメラデバイスは、共通の時間基準上におかれる)、カメラのための3Dキャリブレーションデータ、及び最終結果を作成するプロセッサと、選択的に、関連するタイミング情報を有する照射デバイスとからなる。全てのデバイスは接続されており、情報を共有することができる。
システムは、任意の照射デバイスのタイミングに沿ってタイムスタンプされた一連の画像を作成する。
一連の画像は分析され、ボールがカメラ視野の中にあるかどうかが決定される。ボールが運動している場合、照射デバイスはボールの画像を複数生じさせるということが起こりうる。画像の分析は、以下のとおり進む。
画像中に、何らかのボールが存在するか?
それらの、画像座標における中心及び直径はどうなっているか?
ボール画像中に、内部特徴あるいはマークが存在するか?存在する場合、そのピクセル座標はどうなっているか?
ストロボ照射は存在するか?存在する場合、そこには複数の画像が存在するか?そして、それらはどのようにストロボのタイミングと対応しているか?
画像分析ステップの結果、ボールの飛行について一連の明確な観察がなされる。観察とは、
使用されたカメラ
像空間におけるボール中心位置
ボール中心位置に対するタイムスタンプ
ボールの画像から抽出された一連の特徴
目標画像のピクセルのセット
に係るものである。
一連の観察結果が分析され、ボールが運動したかどうか、そしてボールが飛行モデルと整合して運動したかどうかが決定される。一連の観察結果は3D位置へと変換され、その3D位置とタイムスタンプは整合性のチェックを受ける。一連の観察結果がボールの正当な飛行であるならば、その後、一連の特徴が分析され、それらを用いてボールの回転のオフセットが決定される。このステップにおいて、併せてボールの画像情報を有するべき領域を位置決めすることも可能ではあるが、ある理由により、それには抽出のための特別な処理が要求される。
その後、観察結果を用いて、初期打ち上げ位置、打ち上げ軌道、及びスピン軸とスピンレートが計算される。観察結果基準とは、
max rotation < PIであるような観察結果間の、最小時間
エイリアシングにより回転の情報が除去されないような、個別の時間間隔
Field of view size > max_vel * acq_time * 3であるような、少なくとも2つの観察結果
物体の中心付近の内部特徴を得ることだけができるか
である。
最も短い2msの間隔を得るための、60%−40%の時間オフセット、及び、異なるタイミングのショット間のバイアスからスピンを計算するための、2つの間隔。
−タイムスタンプ観察−
全ての観察結果を用いて、不正確性あるいは180度を過ぎるような急速なスピンによりもたらされるあいまいさを除去することを可能とする。
各々の取得に対する、一定の光、日光、あるいはカメラにより発せられるストロボの照射。
依然として、スピン、速度、及び3D軌道の計算を可能とするような、ボールの正確な3D位置のために、ボールの3D位置がさらに必要である。
あるカメラからの2ショット、及びもうひとつのカメラからの1ショットである3ショットのみを用いてボールの3D位置を探し出すために、以下のことを行う。第1のカメラからの単独のショットに対する2つの画像の間の時間的関係を用いて、そのショットがその上になければならないようなラインの3Dスロープを探し出す。各々のカメラからの2つの画像を用いてボールの3D位置を探し出すために、各々のカメラにより、各々のカメラにおけるボールの、画像座標内の中心があるような3D平面を探し出す。それから、そのボールにより作られた3Dラインを探し出すために、その2つの平面を交差させる。より多くの点を用いることで、カーブをそれらの点に合わせることが可能であって、最も良く適合するカーブを計算できるということに留意すべきである。ここで、各々のボール画像の中心を、見出されたボールの3D軌道に交差させて、世界座標におけるボールの中心を探し出す。ボールの3D軌道をボールのプレースメント平面に交差させることにより、ボールの起点の計算を可能とすることができる。観察結果の全てのペア間における速度のペアワイズ計算を最大限行うことにより、速度が見出される。最終結果として、正しいタイミング関係を有するショットが得られる。
カメラのタイミング関係が分かっており、共通の3D座標系へと較正されている限り、より広い領域をカバーするためにカメラの数を増やすことが可能である。
発火パターンを最大1000Hzまで制御可能なストロボ光を用いれば、たった2つのスローカメラ(60fps、あるいはそれ以下)を使用して、全ての起こりうるゴルフショットから打ち上げデータの捕捉を可能とするデータを得ることができる。捕捉可能なショットの範囲は、スピンが18,000rpm未満であるとして、100m/sから10m/sである。50m/sから5m/sまでの、ショットの第2範囲を用いることができる。5m/sより下の場合、ボールの飛行に対してスピンは小さな影響しか及ぼさない。ショット速度を予め知らずにストロボを使うことには、個別のショットを捕捉することが望まれるという問題がある。十分遅いスピードにおいて、画像は互いに重なり合う。十分速いスピードにおいては、一切の画像が存在しない。カメラの取得レート及び露光の関係、及びストロボタイミングによって、個別の観察結果としてとりうるものの数が決定される。これは、とりうる速度及びスピン速度の範囲と互いに影響しあう。正しいタイミング関係の下での、少なくとも3つの個別の観察結果が目標である。
2つのカメラは、各々のカメラのフレーム開始時において特定のストロボパターンが発せられるよう、ストロボに同期される。カメラを同時に始動するよう同期してもよいし、あるいはそうしなくともよい。各々のフレーム開始について、時間オフセットが知られているということが要求されるのみである。設定と可能なショット範囲との間の相互影響を与えて、少なくとも3つの個別の観察結果を常にもたらすようなストロボパターンが選択される。
画像分析における最初のステップは、個別の画像を探し出すということである。これは、正しい領域と奇抜なものとが結合された要素がないかをチェックする、ブロブ分析によって行われる。これらは、後に整合性と内部特徴についての処理を行うための候補となる。重なり合っていない領域を決定するために用いることのできるようなカーブの部分を有する、部分的に重なり合っている画像について、更に分析をすることが可能である。その後、最小の円を、内部で個別の領域と重なり合っている領域とに分割されるような各々の円へとフィッティングすることが可能である。結果として得られる中心と領域とが、候補を定める。ここで、個別の領域に対してマーキングのための処理がなされる。これは、画像のエッジにおけるボール画像に対しても言えることである。同様の処理により、追加的な観察結果を作り出すことができる。上記3D観察結果と軌道によって、その結果としてもたらされる画像観察を進めることができる。
フレーム開始よりも1ms後にストロボを発火し、少なくとも4msが経過するまでは別のストロボを発火しない。そして、フレームの終わりよりも1ms前にストロボを発火する前に、少なくとも4msは待つ。2msの時間オフセットを有する、2つの別個の画像(前のフレームの終わり、現在のフレームにおける最初のもの)が得られる。これらペアの1つは、60fpsにおいて、16msごとに得られる。16ms間隔(分解能1ms)に対する基本パターンは、1000 0110 0110 0001である。各々の7msサブセットが、少なくとも2つの画像を含むということに留意すべきである。各々の17msサブセットは、少なくとも4msのギャップを有する2つのフレームに亘って取得される1ms間隔の画像の少なくとも1つのペアを含む。ショット速度が、その画像が次の又は前の画像と同化するに十分なほど遅い場合、そのショットは破棄される。短い時間的関係を有し、しかしながら同化しないことが保証されているような2つのショットが、特別なショット(special shots)の値である。我々は、各々のカメラから少なくとも2つ、好ましくは3つ以上の観察結果を必要とする。
利用可能なタイミング関係を有する必要な数の観察結果の捕捉を可能とする、飛行中の物体に適した一連の画像取得作業である。多くのカメラに対して、画像捕捉レートは捕捉されるラインの数に比例する。また、ハードウェアビニング又は他の技法を用いることにより同じ領域をカバーすることができるものの、ラインの数は減る。カバーされる領域はビニングによっては同一のままであるが、ラインの数が2の倍数で減るのであり、またしかしながら、分解能も同じ倍数で低下する。捕捉レートは、同じ倍数で上昇する。幾つかのカメラにおいては取得の最中に取得パラメータを変更することが可能であるが、通常、その変化の効力は幾らかの遅延を伴って発生する。物体が有することのできるスピードの範囲は、常に限られている。典型的に、高速の物体は、単独のフレーム時間内においてカメラの視界を通り過ぎるであろう。したがって、フレームレート全体において2回取得することにより、物体の2つの写真が捕捉されるということは保証されない。
取得される第1の領域はビニングされており、最大スピードにおいてボールを確実に見ることができるために十分なラインのみである。
ピクセル値の初期値からの変化をチェックすることにより、第1のラインからのピクセルは、物体が存在するかどうかチェックされる。第1のラインのヒストグラムにおける変化を調べて、最初に物体を検出することも可能である。
物体が見つかった場合、最大スピードで運動するその物体を捕捉するであろう、起こりうる最も早い取得に対して、取得パラメータがセットされる。第1の最大分解能捕捉のサイズと配置は、第1の領域において物体がどこで見つけられるか、及び起こりうる最大スピードに関連するであろう。
第2の取得は、第1の領域について行われる。
第1及び第2の初期取得値間における物体の位置の変化を用いて、画像を横切るボールの方向とスピードとが見積もられる。その後、この情報は、センサを横切る物体の位置を予測するために用いられる。取得されるラインを、その物体を捕捉するであろうラインへと制限するような、一連の取得値が見出される。決定における誤差を許すための幾つかの追加ラインを伴うような、取得すべきラインの数が、物体のサイズを用いて決定される。この時点で、既に次の取得をセットアップしてもよいということに留意する。
物体のサイズ、速度、及び位置が、ラインのタイミングと共に用いられ、物体がもはや視野に存在しなくなるまでに取得されるべきラインの数及び開始が決定される。
高速物体の場合は、このことにより、最大分解能において丁度1回の、残りの画像センサにおけるさらなる取得が必要となるかもしれない。
センサの視野内に物体が存在する時間の総計は、その速度を導くような最初の2つの見積もりから見出される。
より遅い物体に対しては、非常に多くのショットを捕捉するための時間が存在するであろう。
物体の位置は、この位置を考慮して更新される次の取得領域を用いて計算される。
画像センサを横切るボールの経路が上述のアプローチを用いて予測され、そして、全部のフレームを用いるよりも高いレートにおいて物体を捕捉するための低減された数のラインを用いて物体が追跡される。およそのスピードアップは、物体の占めるラインの数により全体の画像フレームレートを割った比率である。2つの連続したフレームにおいてボール位置を追跡し我々にとって興味のある特徴を抽出するよう、高速画像をここで処理すれば、あるいは、既知の3D関係を有する2つの配向特徴を抽出するか、既知の3D関係を有する3つの特徴を抽出すれば、我々は物体のスピンレートを見積もることができる。スピンのレート及び軸は、自由飛行する物体に対しては大体一定であり、いまや我々は、画像センサの視野内のどこに、そしていつ、さらなる特徴が存在するかということ、及び、どうやってそれらを捕捉するためのウインドウを配置するか、ということを予測できる。我々は、ボールの特徴についての選択された高分解能画像を捕捉し、それらにタイムスタンプをする。
物体の質量中心に対する位置を用いて、タイムスタンプされた特徴のセットを探し出す。
第1の特徴をとり、3Dモデルを回転し、射影して、その画像位置へのマッチングを行う。
第2の特徴をとり、3Dモデルを回転させ、各々のモデル特徴を順々に射影して、画像位置へのマッチングを行う。これにより、nの回転が作成されるであろう。
追加的特徴の全てをとり、3Dモデルを回転させ、各々のモデル特徴を順々に射影して、画像位置へのマッチングを行う。これにより、各々の追加的特徴に対してnの回転が作成されるであろう。
各々の回転をタイムスタンプによって分割し、各々の特徴選択によって暗示されるような回転レートを得る。
一定の回転レートからのずれを最小化するような3Dモデルラベリングに対する特徴を選択する。
不規則で広い間隔によるあいまいさを最小化するよう、特徴の位置を選ぶことができる。
ラベル付けされた特徴のセットを用いて、お互いについてタイムスタンプされた3D位置を作成し、最も適合するスピン軸を見つけ出す。
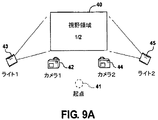
−カメラのセットアップ−
カメラは、ティーの上方に、部分的に視界と重なるよう取り付けられる。視界と重なるような如何なる位置にカメラを取り付けてもよいことに留意する。カメラ位置は各々の次元における正確性に影響を与えるであろうし、また導入、及び衝突からの保護の容易さにも影響するであろう。我々のカメラは較正されているので、カメラが衝突を受けることは可能な限り少ないことが望ましい。ライトは頭上にあり、カメラの外側、かつカメラ同士の間に配置される。カメラは、平面較正目標を用いて較正される。各々のカメラに対する露光のタイミングは、各々の繰り返し処理に対して既知である。このタイミングが固定されている必要はない。
高速カメラを用い、フレームあたり1つのボール画像とし、フレームごとに複数回の露光をする。フレームあたり複数回の露光を可能とするようなストロボシステムあるいはカメラを用いて、これを行うことができる。以下の画像サーチにおいては、1つのボールあるいは複数回の露光を探しているのかを知ることが必要である。画像サーチは候補のボールを識別するものであって、候補のボールはタイミング情報とペアをなすということ、そしてそれらの妥当性が決定される時が、候補の観察結果の作成に含まれるということを除いて、処理は等しい。システムへの入力は、「false」要因に対する多くの考えられる原因をもっては制御されない、ということに留意する。
ゴルフボール画像の探索の用意がされると、システムは各々の画像をくまなくサーチする。見つかった場合、妥当なゴルフボールが取得されたということを確認する、処理の第1のステップが行われる。失われる画像がないように、必要に応じて画像は記憶される。ボールが画像中で静止している場合、その位置が見出され、そしてシステムはそれを無視する。これにより、システムに対して死角が作られる。初期画像を見つけ出す目的で、画像における無視された領域についてマスクが作成される。加えて、一旦視界の中から出発したボールは、カメラの視野から外へ移動するにしたがって無視されるであろう。
各々の画像において、ゴルフボール画像があると見込まれる位置がサーチされる。候補が見つかった場合、各カメラは、位置調整により修正された最小包含円アルゴリズムによって、ボールブロブを抽出する。各々の円に対して、適合性の質の程度が計算される。その画像からの最高の質を有する円が、ボールに対して用いられる。画像空間中の各カメララインが見出され、このラインは世界座標内の3D平面へと渡される。画像を横断するボールの進行が追跡され、ボールが画像を横切ったとき、それ以上の画像が処理されることはない。処理の開始時においてボールの画像がそれ以上現れない場合、開始に誤りがあったものとみなされ、その画像は取り去られ、開始のサーチが続けられる。
2つのラインが両方とも存在する場合、3D軌道ラインを探し出すために、その2つのラインは交差される。ラインからの誤差が見出され、可能であれば異常値が除去される。ひとつのカメラからは1地点のみであって、もうひとつのカメラからは1ラインである場合には、3D軌道ラインを探し出すために別個のアルゴリズムが用いられる。ラインに対するボール画像の適合性の程度が計算される。
ボールの位置と直径とを用いて、ボールの画像が抽出される。この画像は規格化され、暗いストライプが抽出される。
隣り合った地点の任意のペア間の二乗距離を、ブロブの中心からその地点がどれだけ離れているかに基づいてあらかじめ計算された値と比較することにより、ストライプ情報はストライプへと結び付けられる。
結び付けられたストライプは、以下の方法で間引かれる(thinned)。
それらは、球体表面に置かれているものと仮定する。
1つの半球体のみが、視認できる。
ストライプは球体中心について秩序付けられ、θは一端から他端へと移りゆく。
デルタ角度について、重み付けられた質量中心を探し出し、単一の地点を取り出す。
間引かれたストライプにはラベルが付され、捕捉された全てのボール画像に対する名目上の位置からのボールの6軸3Dオフセットを探し出すために、モデルとマッチングされる。
最初の見積もりは、リングの順序付けを用いてなされる。
各々の考えられる組み合わせに対して、候補のラベリングを作成する。
側面の制約を用いて、リングを平面フィッティングする。
各々のラベリング候補に対して、誤差を見つけ出す。
最も適合するラベリングを用いる。
ボールの直径、中心の評価値、及びカメラからの3Dレイを用いて、3Dへと射影する。
フィッティングの質に基づいて、リングにウエイトを割り当てる。
リングにおいて見つかった、2つの最も強い標準(normals)を用いることにより、3D回転行列を探し出す。
使われていない地点を再び組み合わせて、必要であればフィッティングを繰り返す。
平面における移動距離を用いて、中心誤差を見積もる。
必要であれば、修正された中心誤差を用いて計算をやりなおす。
−システム説明−
−マーキングされていないボール−
−偏位法−
−飛行モデル−
所定の初期速度、所定の打ち上げ角度、ボールのレイノルズ数関数(温度、湿度、風速)に対する妥当なボール飛行モデルによってマークされてないボールを用いるときは、ボールの質量により、所定のボールスピンに対するボール軌道を計算することができる。
センサによって、ボールの軌道の第1のセグメントが得られる。典型的には、最も適合する軌道二次関数を決定することを可能とするような、一連の測定が用いられる(例えば、ボールの飛行における最初の1mで、位置が10回測定される)。初期速度及び打ち上げベクトルが決定される。
見出された、ボールの軌道に最も適合するような打ち上げベクトルと速度は、ボール飛行モデルにおいて、ボールの飛行を当該ボール飛行の第2のセグメント(例えば、2m〜3mのうちの1mの距離)に亘って射影するために用いられる。
この飛行モデルを用いて、さまざまなスピンレート及びスピン軸を有する一連の軌道が探し出される。
第2のセンサが、アークにおける第2のセグメント内の軌道を決定するような一連の位置を捕捉する(例えば、2m〜3mより3D位置を10回測定する)。これらの位置は、第1のセグメントの位置を含むような最良のカーブにフィッティングされる。
第1のカーブに適合し、さまざまなスピン値を表すようなボールの飛行モデルカーブは、第2のカーブと比較される。2つのカーブの間の領域を最小化する「スピンカーブ」が見出される。あるいは、所定の時刻における、ゼロスピンボール飛行モデルからの、第2のカーブにおける最大のずれを見つけ出すことができる。これはスピンレートを指示するものであり、またマグナス力の影響によるものである。
ずれが最大となる方向は、正しい方向を指していたところから離れるようなスピン軸の運動を指示する。これは、マグナス力が作用した方向を指示している。測定システムの精度においてマグナス力の影響が測定できるように、このアプローチにおいては十分大きな領域に亘ってのデータが必要とされる。画像は、軌道についての単独のカメラにおけるビューであってよいし、あるいは2以上のカメラにおける、軌道の複数のセグメントに亘るビューであってもよい。異なるスピン値を有するショットが同様のカーブを有するということがありうる。このような場合、ショットについての他の情報を用いて最良の値を選択する。クラブデータ、ロゴスピンデータ、及び有望なショットタイプがあり、またそれら全ては、最も有望な解を選択するために用いることが可能である。ボールの飛行モデルは、所定の測定システムについて十分な精度で軌道を決定することができるものでなければならない。モデルパラメータは典型的に、全てのショットタイプをカバーできるように挿入される複数の代表的ショットから実験的に決定される。このデータは用いられる各々のボールタイプに対して取得されなければならないものであって、わずかに異なるパラメータを有するであろう。
上述の標準的技法を用いて白いボールを照らすことにより個別のボール画像を探し出すことに加えて、他のアプローチを採用することも可能である。軌道カーブを探し出す際に、重なり合う画像を処理して、それらが描く軌道を見つけ出すことが可能である。
カメラの視界は、連続的に画像を露出するような一定の照明により照らされる。結果的に得られるスミアはボールの飛行を表し、ボール上のマーキングの移動は、スピン軸とスピンレートとを表す。画像中に明るいタイミングマークを作り出して正確なタイミング情報を可能とするために、ストロボを一定のレートで発火する必要がある。あるいは、通常はオンであって、タイミングの計算を可能にするような短いオフ間隔を伴うストロボ光を用いることも可能である。ここで、ボール上のマークは、ボールの回転によってスミアが付けられる際に特徴的なパターンを作り出すものでなければならない。スミアパターンからスピンを決定するためのアルゴリズムには、幾つかの種類がある。
既知のスピンについての人工的画像からテーブルを作成し、パターンマッチング及び内挿を行う。
さまざまなサーチラインを用いて、周期的パターンを探す。
スクリーンが、ティー領域の前、横、あるいは後ろに亘って広げられ、可視光又は赤外線で照らされると、ボールのシルエットを処理することにより、ボール又はクラブの通り道を測定することが可能となる。シルエットは、目標の運動を止めるために十分な、短い露出からのものであってよい。あるいはそれよりも長いならば、スミアが作られる。ブロブ分析、それに伴うエッジ、あるいは他の標準的技法により画像からシルエットを抽出することが可能である。
カメラと照射源とが適当な関係を有していれば、オブジェクトは背景に影を作ることもできる。ライトの位置、方向、及び特性がわかれば、影を用いて目標の3D位置を見つけ出すことができる。影は、目標の運動を止めるために十分な、短い露出からのものであってよい。あるいはそれよりも長いならば、スミアが作られる。ブロブ分析、それに伴うエッジ、あるいは他の標準的技法により画像から影を抽出することが可能である。
ボールの画像を用いて、マーキングされていないボールについてスピンを見つけ出すためのセットアップ及び処理方法であるようなアプローチが、KiralyによるUS2004/0032970A1にて説明されている。我々は、このアプローチが「マークアップされた(marked up)」マーキングされていないボール以外の如何なるものに対しても作用するものである、ということには納得していない。この特許出願においては、このアプローチについての制限への対処がなされていないのであるが、しかしながら我々は、そのような制限が重要であって、実現性のある打ち上げモニタ製品であるために十分な精度と信頼性とを備えた製品が得られることはないであろうと考える。
Kiralyの基本的方法は、以下のとおりである。
工場で、単独のカメラを較正する。
カメラが指示する方向を補償する。
画像のボールの直径、及び既知の直径を用いて、ボールの3D位置を見つけ出す。
画像が3Dにマッピングされ、グリント(輝き)が除去される。
ボールを回転させ、画像を再作成する。
ディンプルの中心を見つけ出す。
その後、前の画像に対する、その画像のディンプル中心の2D相関を見出す。
繰り返し処理を行い、最小誤差を見出す。
カメラのペアを3Dで較正する。
ボールに対する3D打ち上げデータを見出す。
1以上のカメラに対して、画像の一部(ディンプル)を選び出す。
所定の量、ボールを回転させる。
(個々のディンプルあるいはマークの)サブ画像から、ボールの画像を再作成する。
ディンプル上における光の角度の変化の、モデル効果。
結果として得られる再作成画像、又は個々のサブ画像に相関する。
両方の画像に対し、ディンプルの位置決めを行い、「バンプス(突出部)」で置換する。その後、何らかの空間と相関付ける(恐らくは、2D/パノラマ射影)。
−マーキングアプローチ−
本発明は、如何なるビューからの方向付けをも可能とし、また如何なるビューからのラベル付けをも可能とするような、マーキングシステムを提供する。
ラインセグメントアプローチ − 図1−4を参照。
円アプローチ − 図5−6を参照。
アークアプローチ − ユニークな任意の3つのアークの距離−ユニークな任意の3つのアークの法線(normal) − 図7−8を参照。
我々が取っている、マーキングされたボールのスピン測定アプローチは、新規であると思われる。私が見てきたあらゆるアプローチは、ボール上であって、通常はボール中のたった1つの領域における目標点のセットを当てにするものであるように思われる。我々のデザインの全ては、いまのところ、任意の単独のボール画像からそのボールの3D配向を発見することができるような何らかの処理方法が存在する、ということを目標にしている。このような特性を有するデザインは、多く存在する。そのボールデザインによれば、ボールを如何なる場所においてティーアップすることも許容されるのであり、任意の時に、あるいはその軌道に沿った任意の位置で、ボールの画像を捕捉することが許容される。それにより、ボールにおけるどのビューが見えているのか、ということを識別することが可能となるのであり、その後その地点においてスピンを計算することが可能となる。これら2つのステップは、ボールが任意の位置にあってよいということを許容するために、そして、任意の2つの画像を用いてスピンを見出すために、不可欠である。不確定の間隔を減らし、測定の精度を高めるためには、さらなる画像及び取得される画像の入念な計時が必要となるかもしれない。
このデザインは、異なる直径と法線とを有する5つの円形マークを備える。法線は全て異なる方向を指しており、また、全ての直径を極力異なるものとする。マークは幾らかの幅を有しており、その幅は隣り合う円の間の最小距離よりも小さい。円は、頂点から底まで配列される。用いられるこのパターンにおいて、如何なる円にも断線は存在しない。デザインを修正して、円内に断線を有しうるものとすることが可能である。円を復元するための処理は、上記マーキングされたボールの打ち上げモニタセクションにて詳述されている。
1つが頂上から赤道への時計回りの向きを有し、第2のものが底部から赤道への反時計回りの向きを有するような、2つのらせんである。極と赤道との間で、1.5−2回の巻きが存在する。らせんを復元するための処理は、円に対する処理と似ている。所定の抽出された3Dセグメントについて、そのセグメントがらせん上のどこからのものであるかを決定するアルゴリズムが要求される。
短いアーク(例えば、長さ6mm、幅3mm)が、以下の制約に従いボール表面について一見ランダムに分布している。
容易にプリントできるよう、円周の周りの領域はマークしないままに残されている。
マーキングされた「湿った」ボールがグリッパーの上に載ることを可能とするような、4つのマーキングされていない領域を有する1つの極付近の領域が残されている。
互いに隣接するマークは、可能な限り異なる向きを有している。
互いに隣接するマークは、可能な限り異なる中心位置を有している。
マークを可能な限り少なくするが、一方でどのビューにおいても少なくとも3つは見えるようにする。
可能な限り、マークによってボールの外周があいまいになることがないようにする。
1つのビューにおいて、幾らかのマークがボールの外周をあいまいにしている場合、その外周について反対側からのビューにおける他のマークは、外周をあいまいにしないような向きを有する。
アルゴリズムは、ラベル付けのステップまでは同一である。マーク間の距離、及びマークの向きの両方を用いて、ラベル付けが行われる。これによりユニークなパターンが形成されるのであり、全ての可能なラベル付けをチェックすることにより最良のラベル付けが計算される。一旦ラベル付けが見つかれば、デザインに対するモデルより、観察結果の回転が決定される。
観察結果の1つは、タイムスタンプ及び当該画像の撮影に用いられたカメラの較正データを有するような、ボールの画像である。それは、ボールの向きを表す6軸オフセット、ボールの位置、抽出されたデータとともに作成された信頼値とともにボールより抽出されたさまざまなサブ画像の位置又は分布、のような以前の入力を用いて抽出された、結果として得られるデータからなるものであってよい。
ボールの観察値のセットを用いて、スピン軸とスピンレートを計算する。観察結果の1つは、カメラ及び関連するタイムスタンプと共にあるような3Dオフセット行列である。3D軸についての、或る大きさの運動として、ねじれが定義される。観察結果の各々のペアリング間の、明らかなねじれを見つけ出す。このねじれ値は、ねじれ値の間の角度のsin/2によって重み付けられる。これらのねじれの重み付け平均は、スピン軸を与える。全体に亘る信頼値を用いてスピン値が計算されるのであり、計算されたスピン軸及びスピンレートからの個々のずれが見出される。その後、これらを用いて異常値が取り除かれ、スピンが再計算される。結果として得られるスピン軸ベクトル及びスピンオフセットが図解的に3Dで示されるのであり、これにより作業者は、値が正しいことを検証することが可能となる。スピン軸を有するボールの飛行のアニメーションが示され、また実際に取得されたデータに対する関係が表される。任意の中間位置におけるボールの画像が作成され、中間位置において任意の角度からボールを視認することが可能となる。
以下、最初の3つの場合においては、球状の物体上で観察されるマークから整合性のある3D座標を計算するための方法が既に存在するものとする。
2つの観察結果に対する直接的な方法は、現在の基準セット(潜在的にボールの中心を含む)に基づいて座標フレームFc1及びFc2を計算し、その後、対応するモデルの基準と共に同一のアルゴリズムを用いてモデルフレームFm1及びFm2を計算することである。同次座標を用いて行列として座標フレームを表すことにより、我々は、以下のようにモデルを観察位置へと動かすオフセット行列を計算することができる。
O1=Fc1*Fm1 -1,O2=Fc2*Fm2 -1
O1をO2へと回転するような所望のオフセット行列Rが、以下のように見出される。
R*O1=O2,R=O2*O1 -1
R=Fc2*Fm2 -1*Fm1*Fc1 -1
四元形式;(cos(Θ/2),ηxsin(Θ/2),ηysin(Θ/2),ηzsin(Θ/2),
あるいは(角度,ベクトル)形式;(Θ,ηx,ηy,ηz)
スピンレート=(Θ +/− N*2π)/(To2−To1)
任意の観察結果のペアにより、ケース1にて概説した手続きを用いて角度/ベクトルの見積もりが出されるであろう。ベクトルの見積もりは2πの間隔に依存するものではなく、見積もりの重み付け平均を直接計算することができる。平均回転レートの計算は、仮定している物理的制約や、観察結果に亘って整合するような個々の2π間隔を見つけるということに依存するであろう。「最もよく適合する」角度/ベクトルを見つけ出すための代わりのアプローチは、問題を3変数における非線形誤差最小化問題として設定し、未知数について解くための標準的技法を用いることである。複数の時間間隔によりあいまいさが低減されるのであり、πよりも大きい観察結果間での回転についてさえ、解を得ることが可能となる。
ボールの反対側に同一のマークを有する既知のボールに対して、スピンレート及び軸を明確な一連の可能性へと制限することができる。マークの積極的な識別に加えて、マークがないということをもって可能性を制限できるということにも注目すべきである。この計算からの結果は常に単独の値であるとは限らず、むしろ可能性のある範囲のセットとして得られるものである。最良の可能性を決定するために、しばしば他の情報が用いられるであろう。
この技法においては、複数の観察結果に亘って視認できるようなボールへの共通のマーキングが要求される。マーキングの回転はボールの回転軸に直交し、マークの移動を用いて回転レートを計算できるであろう。
未知のボールに対して、観察結果のセットを用いて典型的なボールのマーキングと整合するようなボールの記述の構築を試みることができる。見出された観察結果を用いて、既知のゴルフボールマーキングシステムに対する整合性のチェックが行われ、可能であればモデルが作成されるであろう。しかしながら、1つのあるいは複数の視認できるマークを捕捉する観察結果が複数存在する場合、上記のとおりこれを直接用いて、ボールのモデルを構築することなく、回転軸とレートとを見出すことができる。
マークの向きがわかれば、そしてそれが両方の観察結果におけるものであれば、上記のとおり向きの変化を直接計算することが可能である。そうでない場合、回転のサイズの下限を除けば何もわからない。これは、ロゴマークを有する典型的なボールに対する例である。
スピン減衰測定システムは、以下により構成される。
空間の測定体積をカバーすることができ、見出された全てのショットにタイムスタンプをすることができるスピン測定システム。
著しい数のボールがショットの終わりにおいて測定体積を通過するように、設定されたスピン、角度、速度で反復可能にボールを打ち上げる、打ち上げデバイス。
初期スピンと打ち上げデータを捕捉する、スピン測定システム。
一連の特定打ち上げ条件に対してボールの着地スポットの中央に配置することのできる、持ち運び可能なスピン測定。
全ての情報及び計算結果を記録するための、データ収集システム。
所定のスピン、打ち上げ角度及び速度の設定に対して、ボールは20回打たれる。着地位置、及びそれらの分布には注意すべきである。少なくとも5つのボールが飛行により測定ゾーンを通過するような位置が見出され、持ち運び可能なスピン測定システムはそこに置かれる。この設定において20の測定結果が所望される場合、80回のショットがなされ、全てのショットに対して初期スピンデータが捕捉され、ショットの最終セグメントから捕捉された任意のスピンデータと組み合わせられる。これは、全てのスピン測定結果に対してタイムスタンプをマッチングすることにより行われる。
クラブヘッドスピードのある範囲に亘るクラブデータを捕捉するために、発火するストロボを備えた2つのカメラを用いることができる。クラブ上でのマーキングを必要としない、2つのアプローチとは、クラブフェイスを照射するか、あるいはクラブのシルエットを捕捉するものである。クラブのシルエットは、クラブが背景に対して移動するに従ってそのクラブの画像を取得するような高速カメラを用いて得ることができる。赤外線を用いる場合には、赤外光によって強く照らされるような、或る材料を用いることができる。しかしながら、クラブはボールに向かう予測可能な経路内を移動するのであって、したがって取得されなければならない領域は画像全体よりも大幅に小さい。ゆえに、取得領域を計算することが可能であり、クラブに対する効果的な取得レートは200fpsとすることが可能であって、これは前後における少なくとも3つの位置に対して十分な速さである。例えば何らかのCMOSセンサ等、幾つかの商用センサによって興味ある領域の捕捉が可能となるのであり、その取得スピードは取得されるピクセル領域に比例するということに注意すべきである。これにより、捕捉される領域を減らすことができるならば、大幅に高いフレームレートを得ることが可能となる。ボールが打たれるかもしれない潜在的領域を、例えば24”×12”のように大きくとる場合、ボールが実際にどこで打たれるかを知ることにより、捕捉する領域のサイズを1/4から1/16にすることが可能となるかもしれない。これによりフレームレートを4−16倍速くすることが可能となるのであり、クラブスイングの事象を捕捉するために従来の15−60fpsセンサを用いることが可能となる。多くの場合、センサの興味ある取得エリアをセットアップするためのセットアップ時間が存在するということに注意すべきである。しかしながら、この時間は、打つべきボールが静止していなければならないようなゴルフアプリケーションにおいても存在しうるものである。ベースボールに適用する際には、例えば視界をプレートの周りのヒッティングゾーンに制限することが可能である。シルエットアプローチにおいてストロボを用いる場合、各々のショットにおいてクラブヘッドを見分けることは困難である。
クラブ領域を光で照らすことができ、その光の鏡面反射を取得するようカメラが配置される。構造化された光を用い、クラブフェイスを3Dで決定することを可能とするようなパターンを作り出すことができる。クラブの材料及び形状には幅があり、ひとつの設定において全てのタイプのクラブからよいデータを取得することは困難である。
カメラの視界は、連続的に画像を露出するような一定の照明により照らされる。結果的に得られるスミアはボールの飛行を表し、ボール上のマーキングの移動は、スピン軸とスピンレートとを表す。画像中に明るいタイミングマークを作り出して正確なタイミング情報を可能とするために、ストロボを一定のレートで発火する必要がある。あるいは、通常はオンであって、タイミングの計算を可能にするような短いオフ間隔を伴うストロボ光を用いることも可能である。フレームレートが十分であれば、フレームの終わりよりも前に停止する露出により画像中にギャップが作り出され、これにより速度を見出すことが可能となるであろう。ここで、ボール上のマークは、ボールの回転によってスミアが付けられる際に特徴的なパターンを作り出すものでなければならない。同様に、クラブの運動を、クラブのはっきりした形、あるいはそのシルエットでスミアとして捕捉することが可能である。クラブフェイスとカメラの間の3D関係に依存して、幾つかのカメラにおけるエッジのシルエットによってクラブフェイスの3D運動を記述することが可能である。用いられるクラブの範囲に対して都合のよい、そしてカメラにおけるクラブの視認を妨げないような、セットアップが必要となるであろう。
スクリーンが、ティー領域の前、横、あるいは後ろに亘って広げられ、可視光又は赤外線で照らされると、ボール又はクラブによって画像センサ上に落とされる影を分析することにより、ボール又はクラブの通り道を測定することが可能となる。影は、目標の運動を止めるために十分な、短い露出からのものであってよい。あるいはそれよりも長いならば、スミアが作られる。ボール内部の特徴を決定することは不可能である。
使われているクラブの3Dモデルを用いて、それが作るシルエットを十分なカメラから得ることにより、クラブフェイスの経路を再構築することが可能となる。スイング中の幾つかのポイントにおいてクラブの臨界のエッジが視認できるよう、カメラを配置する必要があるであろう。シルエット中のさまざまなエッジから、クラブフェイスの6軸位置が再構築される。カメラにフィルタをかけて、照射波長における影響を最大化することが可能である。緑色(芝の色)の背景に対しては、緑色ノッチフィルタによって可視スペクトルにおける所望の影響が与えられるであろう。赤外線照射に対しては、可視光での色とは無関係に拡散照射を生み出すような材料が存在する。このような性質に関する例としては、オレフィンのカーペットがある。赤外光が照射されたときから拡散赤外光照射を生み出すように、芝の色をしたマットにはこの材料が「ドープ」される。これにより、ヒッティング領域は、クラブとボールとをシルエットで描くバックライトに当てられる。運動の軌道に対してカメラがなす角度によって長い露出におけるシルエット画像の強度が決定されるということに、留意すべきである。
クラブモデルとは、その幾何学構造、及び質量分布等、その他の性質である。これらの値を捕捉して取り出すために、3Dカメラと、恐らくは重量センサが用いられる。あるいは、カメラを用いて、使われるクラブ、及びクラブの性質についてのデータベースから得られるその性質を識別することが可能である。また、ユーザは必要な値を単に入力してもよい。シルエットアプローチにおいては、使われるクラブを決定するために、クラブの取得シーケンスに追加を行うことが必要となるであろう。これにより、その幾何学構造及び性質をデータベースから読み出すか、又はそれらをクラブパラメータ決定作業によって決定することが可能となる。クラブの幾何学構造を見出すプログラムが実行されているさまざまな方向へと、カメラの視界に亘ってクラブを動かすことにより、クラブパラメータが決定される。加えて、クラブの幾何学構造がわかったのであれば、クラブ質量分布プログラムを実行しつつ、幾つかの方向からクラブによって重量シフトセンサを打つことにより、クラブの質量分布を決定することが可能である。例えば、まず底面によってクラブに打撃が与えられなければならず、その後に先端、後端、そしてフェイスの反対側が続くというように、クラブにおいて重量シフトセンサ表面を打つ部分は既知でなければならないとすることができる。
カメラから見てクラブ背後の光景が暗く、何らかのオフセットを用いつつカメラについてさまざまな方向から照射が行われている場合、クラブはそのクラブの背後に影を落とすであろう。影は、目標の運動を止めるために十分な、短い露出からのものであってよい。あるいはそれよりも長いならば、スミアが作られる。このアプローチを、通常のボール画像の取得と合わせて用いることが可能である。ライトとカメラの位置が既知であるとすれば、影は内部的特徴を含まないがボールの位置についての情報を含んでいる。
上記システムは、ボールデータシステム、パッティングシステム、クラブシステム、スイングシステム、及び広角度カメラを備える。
さまざまな目標を照らして目立たせ、これと組み合わせて、2以上のカメラがシミュレータにおけるさまざまな領域から情報を取得する。
シミュレータ上部から広い領域を見渡すカメラが追加される。カメラはシミュレータ座標へと較正され、シミュレータ時間に同期される。このカメラから観察結果が抽出され、さまざまな目的のために使用される。
より分解能の高いカメラによって十分な観察結果が得られない場合、それらを用いて追加的観察結果を与えることができる。このようなことは、ショットが大きく外れたときに起こりうる。
ボールの初期位置、及び打撃の時刻を取得する。
水平打ち上げ角度、クラブ速度等のクラブデータを取得する。
視界中のいずれかより、パッティング情報を捕捉する。
シミュレータが作成される。そのシミュレータは、当該シミュレータにおける3D体積をシミュレーションするものである。それには、ボール飛行モデルと共に、ゴルファー、ゴルフスイング、カメラ、及びライトのモデルが含まれる。それにより、シミュレータのレイアウトの変化に伴うカメラ及びライトのセットアップ調整が可能となる。それは、シミュレーションの初期条件を保存する。サンプルのショットから、一連の画像が作成される。シミュレータにより、起こりうる衝突及び目標間の距離を見ることが可能となる。シミュレータは、画像を劣化させるさまざまなノイズ及びエラー条件の導入を可能とするようセットアップされる。カメラとライトとをセットアップし、特定のシミュレータ構成が与えられたときの最終的な位置を決定するために、それを用いることができる。その後、これらの位置は、カメラとライトの取り付けをするために用いることができる。シミュレータによって、期待される結果と見出された結果との分析を伴うボールマーキングシステムの自動的なテストが可能となる。
このシステムには幾つかの要素が存在する。
隆起を含む地形のモデル。
地形に基づいて局所的風速のモデル化を可能とするような、地形の拡張。
所定の位置に対して実際の空気流を見出すに際して地形を考慮に入れる、空気流モデル。
平均風速数又は気象条件を用いて、例えば丘、川、木がある丘、浜風等の地形的特徴周辺での空気流をモデル化する、空気流モデル。
季節、気象条件、及び日における時刻を考慮に入れる、空気流モデル。
数10メートル(10s of meters)のオーダーで空気流を再形成するようなテーブルを許容するモデル。
Claims (8)
- 打ち上げ角度、ボール速度、ボールスピン等のゴルフボール軌道に関連するデータを収集して分析するためのシステムであって、
視野におけるボールの飛行画像を記録するための少なくとも1つのカメラと、
前記視野の初期部分のみを観察して前記ボールの進入を検出し、前記カメラによって前記ボールの画像を得るための視野における別の部分を予測するための、前記カメラに接続された制御手段と、
を備え、
前記制御手段が、前記視野の初期部分に進入する前記ボールの画像を記録するよう前記カメラを制御し、
前記制御手段が、前記制御手段に接続された前記カメラ又は別のカメラによって前記ボールの画像を得るための前記視野における別の部分を予測するべく、前記視野の初期部分における前記ボールの前記画像に応答し、
前記ボールはマーキングされておらず、前記制御手段が、ボールの飛行モデルを用いて前記ボールの軌道を計算し、前記視野における前記ボールの画像からボールスピンが計算され、
前記制御手段は、
前記カメラから、前記ボールの飛行の最初の第1セグメントの間における、前記ボールの第1の複数画像を取得し、
前記第1の複数画像から、初期速度及び打ち上げベクトルを用いて最も良く適合する第1のカーブを決定し、
前記ボールの軌道を、前記ボールの飛行モデルにおける、前記最も良く適合する第1のカーブの初期速度及び打ち上げベクトルを用いて、前記ボールの飛行における第2セグメントに亘って射影し、
前記ボールの飛行モデルを用いて、さまざまなスピンレート及びスピン軸を有する一連のボール軌道カーブを生成し、
前記カメラ又は別のカメラから、前記ボールの飛行の第2セグメントの間における、前記ボールの第2の複数画像を取得し、
前記第1の複数画像と前記第2の複数画像とを用いて、最も良く適合する第2のカーブを取得し、
a)前記ボール軌道カーブを、前記最も良く適合する第2のカーブと比較し、前記ボール軌道カーブのうち、前記最も良く適合する第2のカーブと、比較された各ボール軌道カーブと、の間の領域を最小化する1つを選択することと、b)前記ボールのスピンレートを指示するものとして、前記最も良く適合する第2のカーブの、所定の時刻においてゼロスピンを有する前記飛行モデルのボール軌道カーブの1つからの最大のずれを決定することとのうちの1つを行うことによって前記軌道を計算する、システム。 - 画像を得るために、複数のカメラ又は高速カメラがストロボライトあるいは赤外線照射とともに用いられる、請求項1に記載のシステム。
- ゴルファーの動きのプロファイル、一連のスイングのプロファイル、及び骨格運動を分析して改善することが可能である、請求項1に記載のシステム。
- 前記制御手段は、前記視野の前記初期部分内の異なる位置における前記ボールの2つの画像を分析することにより、前記視野内の別の部分を予測する、請求項1に記載のシステム。
- 前記制御手段が、前記カメラからの複数のイメージを処理して、ボールの打ち上げ角度を含むボール軌道、ボール速度及びボールスピン、スイングモニタ、打ち上げモニタ、パットプロファイラ、ボールファインダ、及び自動化されたパフォーマンス改善に関するデータを取得する、請求項1に記載のシステム。
- 前記視野内での前記画像を取得するために、複数のカメラ又は高速カメラがストロボ光、あるいは赤外線照射とともに用いられる、請求項1に記載のシステム。
- 前記ボールはマーキングされておらず、前記制御手段は、前記ボールの飛行に亘る前記ボールの画像中の、個々のディンプルのサブ画像を位置決めして相関付けることにより、前記ボールのスピンを計算する、請求項1に記載のシステム。
- 打ち上げ角度、ボール速度、ボールスピン等の、飛行中のマーキングされていないボールの軌道に関連するデータを収集して分析するためのシステムであって、
視野における、前記マーキングされていないボールの飛行の画像を記録するための少なくとも1つのカメラと、
前記少なくとも1つのカメラに接続された制御手段と、
を備え、
前記制御手段が、視野の初期部分に進入する前記ボールの画像を記録するよう前記少なくとも1つのカメラを制御し、
前記制御手段が、前記制御手段に接続された前記少なくとも1つのカメラ又は別のカメラによって前記ボールの画像を得るための前記視野における別の部分を予測するべく、前記視野の初期部分における前記ボールの前記画像に応答し、
前記少なくとも1つのカメラから、前記ボールの飛行の最初の第1セグメントの間における、前記ボールの第1の複数画像を取得し、
前記第1の複数画像から、初期速度及び打ち上げベクトルを用いて最も良く適合する第1のカーブを決定し、
前記ボールの軌道を、ボールの飛行モデルにおける、前記最も良く適合する第1のカーブの初期速度及び打ち上げベクトルを用いて、前記ボールの飛行における第2セグメントに亘って射影し、
前記ボールの飛行モデルを用いて、さまざまなスピンレート及びスピン軸を有する一連のボール軌道カーブを生成し、
前記少なくとも1つのカメラ又は別のカメラから、前記ボールの飛行の第2セグメントの間における、前記ボールの第2の複数画像を取得し、
前記第1の複数画像と前記第2の複数画像とを用いて、最も良く適合する第2のカーブを取得し、
a)前記ボール軌道カーブを、前記最も良く適合する第2のカーブと比較し、前記ボール軌道カーブのうち、前記最も良く適合する第2のカーブと、比較された各ボール軌道カーブと、の間の領域を最小化する1つを選択することと、b)前記ボールのスピンレートを指示するものとして、前記最も良く適合する第2のカーブの、所定の時刻においてゼロスピンを有する前記飛行モデルのボール軌道カーブの1つからの最大のずれを決定することとのうちの1つを行うことによって、前記制御手段が、前記ボールの飛行モデルを用いて前記ボールの軌道を計算し、前記視野における前記ボールの画像からボールスピンが計算される、システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US97418507P | 2007-09-21 | 2007-09-21 | |
| US60/974,185 | 2007-09-21 | ||
| PCT/US2008/077010 WO2009039367A1 (en) | 2007-09-21 | 2008-09-19 | Object location and movement detection system and method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010540036A JP2010540036A (ja) | 2010-12-24 |
| JP5719170B2 true JP5719170B2 (ja) | 2015-05-13 |
Family
ID=40468375
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010525999A Active JP5719170B2 (ja) | 2007-09-21 | 2008-09-19 | 物体の位置及び運動検出システム、及び方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8328653B2 (ja) |
| EP (1) | EP2185255A4 (ja) |
| JP (1) | JP5719170B2 (ja) |
| KR (1) | KR101386793B1 (ja) |
| CN (2) | CN101918089A (ja) |
| WO (1) | WO2009039367A1 (ja) |
Families Citing this family (121)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010040219A1 (en) * | 2008-10-08 | 2010-04-15 | Interactive Sports Technologies Inc. | Sports simulation system |
| US9623284B2 (en) * | 2008-02-20 | 2017-04-18 | Karsten Manufacturing Corporation | Systems and methods for storing and analyzing golf data, including community and individual golf data collection and storage at a central hub |
| US20100328140A1 (en) * | 2008-11-06 | 2010-12-30 | Lang Hong | Video-Doppler-Radar Traffic Surveillance System |
| WO2010102037A2 (en) * | 2009-03-03 | 2010-09-10 | The Ohio State University | Gaze tracking measurement and training system and method |
| US20110077112A1 (en) * | 2009-09-30 | 2011-03-31 | Richard Erario | Electronics module support system for use with sports objects |
| US20110187536A1 (en) * | 2010-02-02 | 2011-08-04 | Michael Blair Hopper | Tracking Method and System |
| US8882606B2 (en) * | 2010-01-28 | 2014-11-11 | Nike, Inc. | Golf swing data gathering method and system |
| US9058670B2 (en) * | 2010-05-03 | 2015-06-16 | Stats Llc | Trajectory detection and analysis in sporting events |
| US20120002041A1 (en) * | 2010-07-02 | 2012-01-05 | Sunman Engineering, Inc. | Golf Ball Finder |
| US8935103B2 (en) * | 2010-07-15 | 2015-01-13 | Nike, Inc. | Method and system for golf ball fitting analysis |
| US8988508B2 (en) * | 2010-09-24 | 2015-03-24 | Microsoft Technology Licensing, Llc. | Wide angle field of view active illumination imaging system |
| KR101733116B1 (ko) * | 2010-12-10 | 2017-05-08 | 한국전자통신연구원 | 고속 스테레오 카메라를 이용한 구형 물체의 비행 정보 측정 시스템 및 방법 |
| KR101031432B1 (ko) * | 2010-12-31 | 2011-04-26 | (주) 골프존 | 비거리 감소율에 대한 보정을 제공하는 가상 골프 시뮬레이션 장치 및 방법 |
| US8708833B2 (en) * | 2011-02-18 | 2014-04-29 | Sri Sports Limited | Method for measuring behavior of golf club and ball |
| KR101078975B1 (ko) * | 2011-03-22 | 2011-11-01 | (주) 골프존 | 가상 골프 시뮬레이션 장치에 이용되는 센싱장치 및 센싱방법 |
| KR101048090B1 (ko) * | 2011-03-22 | 2011-07-08 | (주) 골프존 | 가상 골프 시뮬레이션 장치와, 이에 이용되는 센싱장치 및 센싱방법 |
| KR101078898B1 (ko) * | 2011-03-31 | 2011-11-01 | (주) 골프존 | 가상 골프연습장 시뮬레이션 장치 및 방법 |
| US20120316843A1 (en) * | 2011-06-08 | 2012-12-13 | Cobra Golf Incorporated | Systems and methods for communicating sports-related information |
| JP2013009771A (ja) * | 2011-06-28 | 2013-01-17 | Bridgestone Corp | ゴルフスイング時のヘッドの挙動の計測解析システム、計測解析方法、及びプログラム |
| US8950236B2 (en) | 2011-08-23 | 2015-02-10 | Nike, Inc. | Methods for providing a selection of a recommended golf ball |
| US9448067B2 (en) * | 2011-09-23 | 2016-09-20 | Creatz Inc. | System and method for photographing moving subject by means of multiple cameras, and acquiring actual movement trajectory of subject based on photographed images |
| WO2013067089A2 (en) * | 2011-11-01 | 2013-05-10 | Totus Solutions, Inc. | Networked modular security and lighting device grids and systems, methods and devices thereof |
| US10118078B2 (en) | 2011-11-02 | 2018-11-06 | Toca Football, Inc. | System, apparatus and method for ball throwing machine and intelligent goal |
| GB2496429B (en) * | 2011-11-11 | 2018-02-21 | Sony Corp | A method and apparatus and program |
| KR101706200B1 (ko) | 2011-11-25 | 2017-02-16 | 한국전자통신연구원 | 회전체의 회전 특성 측정 방법 및 장치 |
| CN104094595B (zh) * | 2011-12-29 | 2016-09-14 | 高尔纵株式会社 | 在立体视觉系统中供处理影像的方法及其装置 |
| US8517850B1 (en) | 2012-12-11 | 2013-08-27 | Cobra Golf Incorporated | Golf club grip with device housing |
| US9416959B2 (en) | 2012-05-17 | 2016-08-16 | Donald Spinner | Illuminated golf |
| JP5965293B2 (ja) * | 2012-11-07 | 2016-08-03 | 日本電信電話株式会社 | カメラポーズ推定装置、及びカメラポーズ推定プログラム |
| JP5843751B2 (ja) * | 2012-12-27 | 2016-01-13 | 株式会社ソニー・コンピュータエンタテインメント | 情報処理装置、情報処理システム、および情報処理方法 |
| KR101472274B1 (ko) * | 2013-01-08 | 2014-12-12 | (주) 골프존 | 운동하는 볼에 대한 센싱장치 및 센싱방법 |
| KR101394271B1 (ko) * | 2013-01-08 | 2014-05-13 | (주) 골프존 | 운동하는 볼에 대한 센싱장치 및 센싱방법 |
| KR101308369B1 (ko) | 2013-02-26 | 2013-09-13 | 박선의 | 실외 골프 장치 |
| KR101428922B1 (ko) * | 2013-04-19 | 2014-08-11 | 한밭대학교 산학협력단 | 퍼지 시스템을 이용한 골프 스윙 분류 장치 및 방법 |
| US10576344B1 (en) * | 2013-06-21 | 2020-03-03 | Matthew Glenn | Golfball rebounder |
| US11027193B2 (en) | 2013-07-01 | 2021-06-08 | Flyingtee Tech, Llc | Two-environment game play system |
| EP3016724A4 (en) * | 2013-07-01 | 2017-02-22 | Origin LLC | Two-environment game play system |
| US10126880B2 (en) | 2013-08-22 | 2018-11-13 | Hewlett-Packard Development Company, L.P. | Projective computing system |
| CN105288982B (zh) * | 2014-07-23 | 2018-02-23 | 黄详龙 | 高尔夫球的运动状态测定装置 |
| AT516137A1 (de) * | 2014-08-14 | 2016-02-15 | Natalis Mag Fh Ganzer | Freistoßabstandsanzeigevorrichtung |
| US9555284B2 (en) * | 2014-09-02 | 2017-01-31 | Origin, Llc | Multiple sensor tracking system and method |
| JP6554950B2 (ja) * | 2014-10-31 | 2019-08-07 | 横浜ゴム株式会社 | 移動体の挙動計測方法および挙動計測装置 |
| WO2016068227A1 (ja) * | 2014-10-31 | 2016-05-06 | 横浜ゴム株式会社 | 移動体の挙動計測方法および挙動計測装置 |
| US20160173739A1 (en) * | 2014-12-12 | 2016-06-16 | Acushnet Company | Portable launch monitor |
| CN104469326A (zh) * | 2014-12-25 | 2015-03-25 | 安徽寰智信息科技股份有限公司 | 一种用于板球教学与训练的视频采集与处理方法 |
| CN104486594A (zh) * | 2014-12-26 | 2015-04-01 | 安徽寰智信息科技股份有限公司 | 一种用于壁球教学与训练的视频采集与处理方法 |
| CN104486590A (zh) * | 2014-12-26 | 2015-04-01 | 安徽寰智信息科技股份有限公司 | 一种用于高尔夫球教学与训练的视频采集与处理方法 |
| CN104486592A (zh) * | 2014-12-26 | 2015-04-01 | 安徽寰智信息科技股份有限公司 | 一种用于标枪教学与训练的视频采集与处理方法 |
| CN104581065A (zh) * | 2014-12-29 | 2015-04-29 | 安徽寰智信息科技股份有限公司 | 一种用于曲棍球击球教学与训练的视频采集与处理方法 |
| KR101723432B1 (ko) * | 2015-06-12 | 2017-04-18 | 주식회사 골프존 | 운동하는 볼에 대한 센싱장치 및 센싱방법 |
| KR101892155B1 (ko) * | 2015-10-01 | 2018-08-28 | 라온피플 주식회사 | 캘리브레이션 시스템 및 방법 |
| US20170193140A1 (en) * | 2015-12-30 | 2017-07-06 | IAM Sports & Entertainment | Monitoring Performance and Generating Feedback with Sensor Environment |
| KR101744042B1 (ko) * | 2016-01-14 | 2017-06-07 | 주식회사 골프존뉴딘 | 야구 연습 장치에 이용되는 센싱장치 및 센싱방법과, 이를 이용한 야구 연습 장치 및 이의 제어방법 |
| US9999823B2 (en) * | 2016-01-15 | 2018-06-19 | Inxpar Inc. | System for analyzing golf swing process and method thereof |
| KR101865576B1 (ko) * | 2016-01-22 | 2018-06-08 | 주식회사 골프존뉴딘홀딩스 | 야구 연습 장치에 이용되는 센싱장치 및 센싱방법과, 이를 이용한 야구 연습 장치 및 이의 제어방법 |
| WO2017143341A1 (en) * | 2016-02-19 | 2017-08-24 | Pillar Vision, Inc. | Systems and methods for monitoring objects at sporting events |
| KR101920468B1 (ko) * | 2016-03-04 | 2018-11-20 | 한국전자통신연구원 | 이중 촬영 방식 저속카메라 기반 객체 자동 인식 장치 및 그 방법 |
| US10717001B2 (en) | 2016-03-25 | 2020-07-21 | Zero Latency PTY LTD | System and method for saving tracked data in the game server for replay, review and training |
| US10486061B2 (en) | 2016-03-25 | 2019-11-26 | Zero Latency Pty Ltd. | Interference damping for continuous game play |
| US9916496B2 (en) | 2016-03-25 | 2018-03-13 | Zero Latency PTY LTD | Systems and methods for operating a virtual reality environment using colored marker lights attached to game objects |
| US10071306B2 (en) | 2016-03-25 | 2018-09-11 | Zero Latency PTY LTD | System and method for determining orientation using tracking cameras and inertial measurements |
| US10421012B2 (en) | 2016-03-25 | 2019-09-24 | Zero Latency PTY LTD | System and method for tracking using multiple slave servers and a master server |
| KR101906847B1 (ko) * | 2016-06-29 | 2018-10-12 | 주식회사 크리에이츠 | 공 이미지 촬영을 위한 관심 영역을 결정하기 위한 방법, 시스템 및 비일시성의 컴퓨터 판독 가능한 기록 매체 |
| KR101826837B1 (ko) * | 2016-08-12 | 2018-02-08 | 주식회사 골프존 | 볼의 비행정보 연산장치, 볼의 비행정보 연산방법 및 이를 기록한 컴퓨팅장치에 의해 판독 가능한 기록매체 |
| US10751609B2 (en) | 2016-08-12 | 2020-08-25 | Zero Latency PTY LTD | Mapping arena movements into a 3-D virtual world |
| CN106643662B (zh) * | 2016-09-20 | 2019-03-19 | 深圳市衡泰信科技有限公司 | 球体及其高速旋转运动参数检测方法 |
| CN106422210B (zh) * | 2016-10-13 | 2018-07-20 | 北京昊翔信达科技有限公司 | 一种基于图像处理的人体运动状态检测方法及系统 |
| EP3539084A4 (en) * | 2016-11-10 | 2020-05-13 | Formalytics Holdings PTY Ltd | MEASURING THE PROPERTY OF A FLIGHT TRACK OF A BALL |
| US9737757B1 (en) * | 2016-11-16 | 2017-08-22 | Wawgd, Inc | Golf ball launch monitor target alignment method and system |
| KR101971060B1 (ko) * | 2016-11-18 | 2019-04-23 | 한국전자통신연구원 | 모듈형 고속 촬영 장치, 고속 영상 기반의 공 운동 인식 장치 및 방법 |
| EP3574490A1 (en) * | 2017-01-26 | 2019-12-04 | Telefonaktiebolaget LM Ericsson (publ) | Detection systems and methods |
| GB201703243D0 (en) * | 2017-02-28 | 2017-04-12 | Pro Sport Support Ltd | System, method, apparatus and marker for assessing athletic performance |
| KR101973607B1 (ko) * | 2017-03-03 | 2019-04-29 | 주식회사 엠엘코어 | Rfid를 이용한 볼 추적 장치 및 방법 |
| US10486032B2 (en) * | 2017-03-09 | 2019-11-26 | Sportsmedia Technology Corporation | Systems and methods for tracking sports balls configured with electronic components |
| US10810903B2 (en) | 2017-04-05 | 2020-10-20 | Flyingtee Tech, Llc | Computerized method of detecting and depicting a travel path of a golf ball |
| US20180353828A1 (en) * | 2017-06-09 | 2018-12-13 | Golftech, Llc | Method and apparatus for ball flight analysis |
| US10803598B2 (en) * | 2017-06-21 | 2020-10-13 | Pankaj Chaurasia | Ball detection and tracking device, system and method |
| US10489656B2 (en) * | 2017-09-21 | 2019-11-26 | NEX Team Inc. | Methods and systems for ball game analytics with a mobile device |
| USD842401S1 (en) | 2017-11-02 | 2019-03-05 | Daniel J. Mueller | Baseball |
| US10380409B2 (en) * | 2017-11-16 | 2019-08-13 | Blast Motion Inc. | Method for estimating a 3D trajectory of a projectile from 2D camera images |
| USD849166S1 (en) | 2017-12-07 | 2019-05-21 | Ssg International, Llc | Golf putter grip |
| US10099101B1 (en) | 2017-12-07 | 2018-10-16 | Ssg International, Llc | Golf club grip with sensor housing |
| CN110298864B (zh) * | 2018-03-23 | 2021-05-11 | 深圳市衡泰信科技有限公司 | 一种高尔夫推杆设备的视觉感测方法及装置 |
| US11077351B2 (en) * | 2018-05-02 | 2021-08-03 | Rapsodo Pte. Ltd. | Measurement and reconstruction of the golf launching scene in 3D |
| WO2019229748A1 (en) * | 2018-05-28 | 2019-12-05 | United Perfectum Ltd. | Golf game video analytic system |
| US11783707B2 (en) | 2018-10-09 | 2023-10-10 | Ford Global Technologies, Llc | Vehicle path planning |
| KR102024831B1 (ko) * | 2018-10-29 | 2019-09-25 | 주식회사 크리에이츠 | 공의 회전을 측정하기 위한 방법, 시스템 및 비일시성의 컴퓨터 판독 가능한 기록 매체 |
| KR102185322B1 (ko) * | 2018-11-28 | 2020-12-01 | 알바이오텍 주식회사 | 적외선 스테레오 카메라를 이용한 위치 검출 시스템 |
| JP2022521056A (ja) | 2019-02-22 | 2022-04-05 | トラックマン・アクティーゼルスカブ | ゴルフ練習場でのショットの移動経路特性のためのシステム及び方法 |
| GB2582273A (en) * | 2019-03-07 | 2020-09-23 | Gazapi Sport Ltd | Sports balls |
| US10835803B2 (en) * | 2019-03-18 | 2020-11-17 | Rapsodo Pte. Ltd. | Object trajectory simulation |
| US11030774B2 (en) | 2019-03-19 | 2021-06-08 | Ford Global Technologies, Llc | Vehicle object tracking |
| US11045705B2 (en) * | 2019-03-19 | 2021-06-29 | NEX Team Inc. | Methods and systems for 3D ball trajectory reconstruction |
| SE543273C2 (en) * | 2019-03-29 | 2020-11-10 | Tobii Ab | Training an eye tracking model |
| US11460851B2 (en) | 2019-05-24 | 2022-10-04 | Ford Global Technologies, Llc | Eccentricity image fusion |
| US11521494B2 (en) | 2019-06-11 | 2022-12-06 | Ford Global Technologies, Llc | Vehicle eccentricity mapping |
| US11662741B2 (en) | 2019-06-28 | 2023-05-30 | Ford Global Technologies, Llc | Vehicle visual odometry |
| EP4010090A4 (en) * | 2019-08-07 | 2023-11-22 | Triple Track, LLC | GOLF BALL WITH MARKER |
| CN110598570A (zh) * | 2019-08-20 | 2019-12-20 | 贵州民族大学 | 一种行人异常行为检测方法、系统、存储介质及计算机设备 |
| US10894198B1 (en) * | 2019-10-01 | 2021-01-19 | Strikezone Technologies, LLC | Systems and methods for dynamic and accurate pitch detection |
| JP6763559B1 (ja) | 2019-10-31 | 2020-09-30 | 株式会社Gpro | ボール追跡装置及びボール追跡方法 |
| CN110755835B (zh) * | 2019-11-01 | 2021-09-14 | 深圳市衡泰信科技有限公司 | 一种高尔夫防作弊系统 |
| US11207582B2 (en) | 2019-11-15 | 2021-12-28 | Toca Football, Inc. | System and method for a user adaptive training and gaming platform |
| EP4091681A4 (en) | 2020-01-16 | 2023-07-26 | Creatz Inc. | METHOD, SYSTEM AND COMPUTER READABLE NON-TRANSITORY RECORDING MEDIA FOR MEASURING BALL ROTATION |
| US10898757B1 (en) * | 2020-01-21 | 2021-01-26 | Topgolf Sweden Ab | Three dimensional object tracking using combination of radar speed data and two dimensional image data |
| CN212416889U (zh) * | 2020-03-13 | 2021-01-29 | 深圳市衡泰信科技有限公司 | 高尔夫高速摄像感应器专用mark球 |
| EP4139893A4 (en) * | 2020-04-24 | 2024-04-17 | Visionary Machines Pty Ltd | SYSTEMS AND METHODS FOR GENERATING AND/OR USING THREE-DIMENSIONAL INFORMATION WITH CAMERA ARRAYS |
| AU2020449439B2 (en) * | 2020-07-29 | 2023-04-20 | Shenzhen Greenjoy Technology Co., Ltd. | Mark ball special for golf high-speed camera sensor |
| US11710316B2 (en) | 2020-08-13 | 2023-07-25 | Toca Football, Inc. | System and method for object tracking and metric generation |
| US11514590B2 (en) | 2020-08-13 | 2022-11-29 | Toca Football, Inc. | System and method for object tracking |
| EP4172934B1 (en) * | 2020-08-14 | 2024-10-09 | Topgolf Sweden AB | Motion based pre-processing of two-dimensional image data prior to three-dimensional object tracking with virtual time synchronization |
| CN112801193B (zh) * | 2021-02-03 | 2023-04-07 | 拉扎斯网络科技(上海)有限公司 | 定位数据处理方法、装置、电子设备、介质 |
| KR102603088B1 (ko) * | 2021-03-30 | 2023-11-16 | 주식회사 골프존 | 타격되어 이동하는 골프공에 대한 스핀 산출 방법 및 이를 이용한 스핀 산출 장치 |
| DE102021202843A1 (de) * | 2021-03-23 | 2022-09-29 | ESN Deutsche Tischtennis Technologie GmbH | Tischtennisball mit Markierung zur Erfassbarmachung einer Ballrotation |
| US11615582B2 (en) * | 2021-06-08 | 2023-03-28 | Fyusion, Inc. | Enclosed multi-view visual media representation |
| CN113274733A (zh) * | 2021-07-12 | 2021-08-20 | 上海小白球体育文化发展有限公司 | 一种高尔夫球置顶式检测方法、系统及存储介质 |
| KR102612559B1 (ko) * | 2021-12-06 | 2023-12-13 | (주) 엑스골프 | 패턴이 인쇄된 골프공의 움직임을 추적하는 전자 장치, 이의 동작 방법 및 이를 저장하는 컴퓨터로 판독 가능한 기록 매체 |
| US12046047B2 (en) | 2021-12-07 | 2024-07-23 | Ford Global Technologies, Llc | Object detection |
| KR20230087231A (ko) * | 2021-12-09 | 2023-06-16 | (주)네오와인 | 인공지능 기반 이동 객체의 위치 측정 시스템 및 방법 |
| CN114677430B (zh) * | 2022-01-12 | 2024-04-16 | 深圳市路远智能装备有限公司 | 一种组合式的多相机视觉对位方法 |
| US20240244337A1 (en) * | 2023-01-13 | 2024-07-18 | Clarity.GolfInc. | Data collection by a dynamic area of interest camera technique |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4063259A (en) | 1975-10-29 | 1977-12-13 | Acushnet Company | Method of matching golfer with golf ball, golf club, or style of play |
| US4375887A (en) | 1975-10-29 | 1983-03-08 | Acushnet Company | Method of matching golfer with golf ball, golf club, or style of play |
| US4136387A (en) | 1977-09-12 | 1979-01-23 | Acushnet Company | Golf club impact and golf ball launching monitoring system |
| US4160942A (en) | 1977-09-12 | 1979-07-10 | Acushnet Company | Golf ball trajectory presentation system |
| US4158853A (en) | 1977-09-12 | 1979-06-19 | Acushnet Company | Monitoring system for measuring kinematic data of golf balls |
| JPH0777590B2 (ja) * | 1991-01-16 | 1995-08-23 | 美津濃株式会社 | ゴルフゲーム模擬装置 |
| US6758759B2 (en) * | 2001-02-14 | 2004-07-06 | Acushnet Company | Launch monitor system and a method for use thereof |
| US6241622B1 (en) | 1998-09-18 | 2001-06-05 | Acushnet Company | Method and apparatus to determine golf ball trajectory and flight |
| US5846086A (en) * | 1994-07-01 | 1998-12-08 | Massachusetts Institute Of Technology | System for human trajectory learning in virtual environments |
| JPH1144700A (ja) * | 1997-07-25 | 1999-02-16 | Sanyo Electric Co Ltd | 速度測定装置、該装置を用いた自動追尾システム及び予想到達位置表示システム |
| US6359647B1 (en) | 1998-08-07 | 2002-03-19 | Philips Electronics North America Corporation | Automated camera handoff system for figure tracking in a multiple camera system |
| US6514081B1 (en) * | 1999-08-06 | 2003-02-04 | Jeffrey L. Mengoli | Method and apparatus for automating motion analysis |
| US6697820B1 (en) | 2000-01-14 | 2004-02-24 | Martin B. Tarlie | System for and method of golf performance recordation and analysis |
| US7118498B2 (en) | 2000-06-16 | 2006-10-10 | Skyhawke Technologies, Llc | Personal golfing assistant and method and system for graphically displaying golf related information and for collection, processing and distribution of golf related data |
| JP2002024466A (ja) | 2000-07-05 | 2002-01-25 | Fujitsu Ltd | ゴルフデータ管理システム及びデータセンタ及びゴルフデータ管理方法 |
| US6585609B2 (en) | 2001-01-05 | 2003-07-01 | John Bays | Golf shot mapping and analysis system |
| JP3778427B2 (ja) * | 2001-04-26 | 2006-05-24 | 株式会社フォトロン | 打球診断システム |
| WO2003022369A2 (en) | 2001-09-12 | 2003-03-20 | Pillar Vision Corporation | Trajectory detection and feedback system |
| KR200265558Y1 (ko) | 2001-11-30 | 2002-02-21 | 김기수 | 체감형 골프 시뮬레이션 시스템 |
| AU2003274430A1 (en) * | 2002-06-06 | 2003-12-22 | Wintriss Engineering Corporation | Flight parameter measurement system |
| US7324663B2 (en) * | 2002-06-06 | 2008-01-29 | Wintriss Engineering Corporation | Flight parameter measurement system |
| JP4064248B2 (ja) | 2003-01-21 | 2008-03-19 | Sriスポーツ株式会社 | ボール弾道計測装置 |
| US20060025229A1 (en) * | 2003-12-19 | 2006-02-02 | Satayan Mahajan | Motion tracking and analysis apparatus and method and system implementations thereof |
| US7170592B2 (en) | 2004-03-10 | 2007-01-30 | Acushnet Company | Method of inspecting a sphere without orienting the sphere |
| US7095312B2 (en) | 2004-05-19 | 2006-08-22 | Accurate Technologies, Inc. | System and method for tracking identity movement and location of sports objects |
| KR100631035B1 (ko) * | 2004-06-03 | 2006-10-02 | 이기영 | 구기 스포츠의 스윙 폼 교정장치 |
| US7143639B2 (en) | 2004-06-07 | 2006-12-05 | Acushnet Company | Launch monitor |
| JP2006181014A (ja) * | 2004-12-27 | 2006-07-13 | Fuji Photo Film Co Ltd | 画像解析装置および動作修正システム |
| US7264554B2 (en) * | 2005-01-26 | 2007-09-04 | Bentley Kinetics, Inc. | Method and system for athletic motion analysis and instruction |
| JP4646209B2 (ja) * | 2005-02-23 | 2011-03-09 | 日本ナレッジ株式会社 | 実技分析システム及びプログラム |
| JP4609646B2 (ja) | 2005-03-29 | 2011-01-12 | ブリヂストンスポーツ株式会社 | ゴルフボールの弾道シミュレーション方法及び飛行シミュレーション方法 |
| US7217164B2 (en) | 2005-08-03 | 2007-05-15 | Andrew Liam Brendan Short | Visual sports training apparatus and method |
| US8016688B2 (en) | 2005-08-15 | 2011-09-13 | Acushnet Company | Method and apparatus for measuring ball launch conditions |
| US20070049393A1 (en) | 2005-08-26 | 2007-03-01 | Acushnet Company | Method for predicting ball launch conditions |
| JP2007167549A (ja) | 2005-12-26 | 2007-07-05 | Mizuno Corp | ゴルフクラブヘッド挙動解析装置およびゴルフクラブヘッド挙動解析方法、シート材 |
| EP1810721A1 (en) * | 2006-01-19 | 2007-07-25 | Friends-for-Golfers GmbH | Golf diagnosis apparatus, golf equipment device, golf diagnosis system, and method of mounting a golf diagnosis apparatus |
-
2008
- 2008-09-19 CN CN2008801170286A patent/CN101918089A/zh active Pending
- 2008-09-19 CN CN201410709580.1A patent/CN104524758B/zh not_active Expired - Fee Related
- 2008-09-19 WO PCT/US2008/077010 patent/WO2009039367A1/en active Application Filing
- 2008-09-19 JP JP2010525999A patent/JP5719170B2/ja active Active
- 2008-09-19 KR KR1020107008750A patent/KR101386793B1/ko active IP Right Grant
- 2008-09-19 EP EP08832556.8A patent/EP2185255A4/en not_active Ceased
- 2008-09-19 US US12/678,826 patent/US8328653B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2185255A1 (en) | 2010-05-19 |
| CN101918089A (zh) | 2010-12-15 |
| EP2185255A4 (en) | 2013-08-14 |
| US8328653B2 (en) | 2012-12-11 |
| CN104524758A (zh) | 2015-04-22 |
| KR20100102583A (ko) | 2010-09-24 |
| JP2010540036A (ja) | 2010-12-24 |
| US20100210377A1 (en) | 2010-08-19 |
| CN104524758B (zh) | 2017-10-03 |
| KR101386793B1 (ko) | 2014-04-21 |
| WO2009039367A1 (en) | 2009-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5719170B2 (ja) | 物体の位置及び運動検出システム、及び方法 | |
| US11291902B2 (en) | Systems and methods for illustrating the flight of a projectile | |
| US7300356B2 (en) | Apparatus and method of measuring the flying behavior of a flying body | |
| US20180345076A1 (en) | Sports simulator and simulation method | |
| US7744480B2 (en) | One camera club monitor | |
| US9132345B2 (en) | Methods and systems for sports simulation | |
| JP3235987B2 (ja) | ゴルフボールの回転運動測定方法 | |
| JP4628782B2 (ja) | 飛行パラメータ測定システム | |
| JP3778427B2 (ja) | 打球診断システム | |
| JP5584961B2 (ja) | ゴルフクラブの試打システムおよびゴルフクラブの試打方法 | |
| JP4109094B2 (ja) | 球体の回転特性と飛行特性の測定方法 | |
| US20180353828A1 (en) | Method and apparatus for ball flight analysis | |
| US7346194B2 (en) | Method and apparatus of measuring rotational and flight characteristics of sphere | |
| KR20020005580A (ko) | 골프 공 비행 감시 장치 | |
| KR20220136560A (ko) | 2대의 카메라에 의해 실측되는 볼의 회전정보를 이용한 골프 시뮬레이션 방법 및 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110901 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121129 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130228 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130307 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140226 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140526 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150218 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150320 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5719170 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |