JP5587683B2 - motor - Google Patents
motor Download PDFInfo
- Publication number
- JP5587683B2 JP5587683B2 JP2010148916A JP2010148916A JP5587683B2 JP 5587683 B2 JP5587683 B2 JP 5587683B2 JP 2010148916 A JP2010148916 A JP 2010148916A JP 2010148916 A JP2010148916 A JP 2010148916A JP 5587683 B2 JP5587683 B2 JP 5587683B2
- Authority
- JP
- Japan
- Prior art keywords
- angle
- salient pole
- rotor
- boundary
- salient
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004804 winding Methods 0.000 claims description 18
- 230000002093 peripheral effect Effects 0.000 claims description 5
- 239000004020 conductor Substances 0.000 description 5
- 230000004907 flux Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
Images









Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Description
本発明は、コンシクエントポール型構造を採用したロータを有するモータに関するものである。 The present invention relates to a motor having a rotor adopting a continuous pole type structure.
従来、モータにおいて、例えば特許文献1にて示されているように、ロータコアの周方向に一方の磁極のマグネットが複数配置され、該コアに一体形成された突極が各マグネット間に配置され、該突極を他方の磁極として機能させる所謂コンシクエントポール型構造のロータを有するものが知られている。このようなモータでは、性能の低下を小さく抑えつつもロータのマグネットを半数に減らすことが可能となるため、省資源や低コスト等の点で有利である。
Conventionally, in a motor, for example, as shown in
ところで、特許文献1のようなコンシクエントポール型構造のロータは、磁束の強制力(誘導)のあるマグネットと、磁束の強制力のない突極とが混在する磁極にて構成されているため、磁気的にアンバランスが生じ易く、このことが例えばコギングトルクの発生による振動増加等の回転性能の悪化に繋がっている。
By the way, a rotor having a consequent pole type structure as in
本発明は、上記課題を解決するためになされたものであって、その目的は、低振動化を図り、回転性能を向上することができるモータを提供することにある。 The present invention has been made to solve the above problems, and an object of the present invention is to provide a motor capable of reducing vibration and improving rotational performance.
上記課題を解決するために、請求項1に記載の発明は、ロータコアの周方向に一方の磁極のマグネットが等間隔に複数配置されるとともに、前記ロータコアに一体形成された突極が各マグネット間に空隙を以て配置され、前記突極を他方の磁極として機能するように構成されたロータと、前記ロータの外周側に配置され、径方向に延び周方向に等間隔に設けられるティースを有するコアと前記ティースに装着された多相の巻線とを有するステータとを備えたモータであって、複数の前記突極は、周方向においてその中心部が等間隔にそれぞれ配置されるものであり、前記ロータの軸線を中心とする外側面の開角度が互いに異なる第1突極部と第2突極部とを含んで構成されており、前記マグネットは、前記第1突極部及び前記第2突極部よりも周方向長さが大きいことを特徴とする。
In order to solve the above-mentioned problem, the invention according to
この発明では、ロータの第1突極部及び第2突極部の外側面の開角度が互いに異なるため、第1突極部と第2突極部でのコギングトルクが生じるタイミングにずれが生じる。そのため、突極の開角度が均一な構成と比較してモータ全体で生じるコギングトルクの低減が可能となり、ロータの回転性能を向上させることができる。 In this invention, since the open angles of the outer surface of the first salient pole part and the second salient pole part of the rotor are different from each other, the timing at which the cogging torque is generated at the first salient pole part and the second salient pole part is shifted. . For this reason, it is possible to reduce the cogging torque generated in the entire motor as compared with a configuration in which the salient poles have a uniform opening angle, and the rotational performance of the rotor can be improved.
請求項2に記載の発明は、請求項1に記載のモータにおいて、前記突極の外側面の開角度を変化させていったときにその突極で生じるコギングトルクが正位相から逆位相に位相反転する境界角度を「α」とするとともに、前記コギングトルクが前記逆位相から前記正位相に位相反転する境界角度を「β」(但し、α<β)として、前記第1及び第2突極部のいずれか一方の外側面の開角度が、前記境界角度α未満又は前記境界角度βよりも大きく設定されるとともに、他方の外側面の開角度が、前記境界角度α以上、且つ前記境界角度β以下に設定されたことを特徴とする。 According to a second aspect of the present invention, in the motor of the first aspect, when the open angle of the outer surface of the salient pole is changed, the cogging torque generated at the salient pole is shifted from the positive phase to the opposite phase. The boundary angle at which the cogging torque is inverted is “α”, and the boundary angle at which the cogging torque is phase-inverted from the opposite phase to the positive phase is “β” (where α <β). The opening angle of any one of the outer surfaces is set to be less than the boundary angle α or larger than the boundary angle β, and the opening angle of the other outer surface is not less than the boundary angle α and the boundary angle It is characterized by being set to β or less.
この発明では、第1及び第2突極部の外側面の開角度が、その第1及び第2突極部で生じるコギングトルクが互いに位相反転するように設定される。このため、第1突極部で生じるコギングトルクが第2突極部で生じるコギングトルクにて抑えられるため、コギングトルクをより確実に低減することが可能となる。 In the present invention, the open angle of the outer surface of the first and second salient pole portions is set so that the cogging torques generated at the first and second salient pole portions are mutually phase-inverted. For this reason, since the cogging torque generated at the first salient pole portion is suppressed by the cogging torque generated at the second salient pole portion, the cogging torque can be more reliably reduced.
請求項3に記載の発明は、請求項2に記載のモータにおいて、前記第1及び第2突極部のいずれか一方の外側面の開角度が、前記境界角度α未満に設定されるとともに、他方の外側面の開角度が、前記境界角度α以上、且つ{(α+β)/2}以下に設定されたことを特徴とする。 According to a third aspect of the present invention, in the motor according to the second aspect, an open angle of either one of the first salient pole portion and the second salient pole portion is set to be less than the boundary angle α. The opening angle of the other outer surface is set to be not less than the boundary angle α and not more than {(α + β) / 2}.
この発明では、第1及び第2突極部のいずれか一方の外側面の開角度が、境界角度α未満に設定され、他方の開角度が境界角度α以上且つ境界角度β以下の範囲の中でも境界角度α,βの真ん中の角度よりも境界角度αよりの角度に設定される。これにより、第1及び第2突極部で生じるコギングトルクの位相を互いに反転させつつも、第1及び第2突極部とマグネットとの周方向の間隔を大きく構成することが可能となるため、第1及び第2突極部とマグネットとの周方向の間隔が狭いことに起因する漏れ磁束を小さく抑えることが可能となる。 In this invention, the open angle of the outer surface of one of the first and second salient pole portions is set to be less than the boundary angle α, and the other open angle is within the range of the boundary angle α and the boundary angle β. It is set to an angle from the boundary angle α rather than the middle angle of the boundary angles α and β. Accordingly, it is possible to increase the circumferential interval between the first and second salient pole portions and the magnet while reversing the phases of the cogging torque generated at the first and second salient pole portions. Thus, it is possible to reduce the leakage magnetic flux caused by the narrow circumferential interval between the first and second salient pole portions and the magnet.
請求項4に記載の発明は、請求項2に記載のモータにおいて、前記第1及び第2突極部のいずれか一方の外側面の開角度が、前記境界角度βより大きな値に設定されるとともに、他方の外側面の開角度が、{(α+β)/2}以上、且つ前記境界角度β以下に設定されたことを特徴とする。 According to a fourth aspect of the present invention, in the motor according to the second aspect, an open angle of one of the first and second salient pole portions is set to a value larger than the boundary angle β. In addition, the opening angle of the other outer surface is set to be not less than {(α + β) / 2} and not more than the boundary angle β.
この発明では、第1及び第2突極部のいずれか一方の外側面の開角度が、境界角度βより大きな値に設定され、他方の開角度が境界角度α以上且つ境界角度β以下の範囲の中でも境界角度α,βの真ん中の角度よりも境界角度βよりの角度に設定される。これにより、第1及び第2突極部で生じるコギングトルクの位相を互いに反転させつつも、第1及び第2突極部とマグネットとの周方向の間隔を小さく構成することが可能となるため、第1及び第2突極部とマグネットとの周方向の間隔が広いことに起因するトルクの低減を抑えることが可能となる。 In this invention, the open angle of the outer surface of one of the first and second salient pole portions is set to a value larger than the boundary angle β, and the other open angle is in the range of the boundary angle α and the boundary angle β. Among these, the angle is set to be an angle from the boundary angle β rather than the middle angle between the boundary angles α and β. As a result, it is possible to reduce the circumferential interval between the first and second salient pole portions and the magnet while reversing the phases of the cogging torque generated at the first and second salient pole portions. Further, it is possible to suppress a reduction in torque due to the wide circumferential interval between the first and second salient pole portions and the magnet.
請求項5に記載の発明は、請求項1に記載のモータにおいて、前記ステータの巻線が分布巻で構成されていることを特徴とする。
この発明では、コイルが分布巻で構成されたステータを有するモータにおいてコギングトルクの低減が可能となり、ロータの回転性能を向上させることができる。
According to a fifth aspect of the present invention, in the motor according to the first aspect, the stator winding is constituted by distributed winding.
According to the present invention, it is possible to reduce cogging torque in a motor having a stator in which a coil is composed of distributed windings, and it is possible to improve the rotational performance of the rotor.
従って、上記記載の発明によれば、低振動化を図り、回転性能を向上することができる。 Therefore, according to the above described invention, it is possible to reduce the vibration and improve the rotation performance.
以下、本発明を具体化した一実施形態を図面に従って説明する。
図1(a)に示すように、本実施形態のインナロータ型のモータ1は、略円環状のステータ2の内側にロータ3が配置されて構成されている。
DESCRIPTION OF EXEMPLARY EMBODIMENTS Hereinafter, an embodiment of the invention will be described with reference to the drawings.
As shown in FIG. 1A, the inner
ステータ2は、図1(a)(b)に示すように、円筒部11と円筒部11から径方向内側に延びて周方向に複数(本実施形態では60個)設けられるティース12とを有するステータコア4を備える。ステータコア4の各ティース12間には、ロータ3を回転させる磁界を発生させるためのセグメント巻線13が挿入されるスロットSが形成されている。即ち、スロットSの個数は、ティース12の個数と同数(本実施形態では60個)となっている。尚、ティース12とセグメント巻線13との間には、図示しないインシュレータが介在されている。
As shown in FIGS. 1A and 1B, the
ステータ2のセグメント巻線13は、多相(本実施の形態では3相)の分布巻とされている。セグメント巻線13は、ティース12間のスロットSを軸方向(紙面直交方向)に貫通するようにスロットS内に配置されるスロット挿入部14aと、スロットSから軸方向に突出するスロット突出部(図示略)とを有する複数のセグメント導体14を相毎に有している。そして、その相毎のセグメント導体14同士が、前記スロット突出部同士にて周方向に電気的に接続されて構成される。尚、各セグメント導体14は、導体板が折り曲げ加工されてなり、略U字状に形成されており、U字の平行直線部に相当する一対のスロット挿入部14aは、周方向に6個のティース12を跨いで離間した2つのスロットS内にそれぞれ配置されるようになっている。
The segment winding 13 of the
ロータ3は、回転軸21の外周面に磁性金属材料よりなる略円環状のロータコア22が固着されており、該ロータコア22の外周部の周方向等間隔にN極のマグネット23が4個配置されている。また、各マグネット23間には、ロータコア22の外周部に一体形成された第1突極31及び第2突極32が1つずつ周方向交互に配置されている。つまり、各マグネット23と突極31,32とは、等角度間隔に交互に配置(この場合、45°間隔に配置)され、ロータ3は、N極のマグネット23に対して第1及び第2突極31,32をS極として機能させる8磁極の所謂コンシクエントポール型にて構成されている。尚、ロータ3の極対数はマグネット23と同数であり、本実施形態では極対数は「4」となっている。尚、セグメント導体14がティース12を跨ぐ本数は、(スロット数/磁極数)により決定されるようになっている。
In the
ロータ3のマグネット23は、第1及び第2突極31,32よりも周方向長さが若干大きく、湾曲形状をなす外側面23aと平坦な内側面23bとを有する略四角柱状に形成されている。マグネット23の外側面23aは、軸線Cを中心とする円弧状をなし、ティース12の先端部12aと径方向に対向している。マグネット23は、その内側面23bがロータコア22の隣接する突極31,32間に設けた固着面22aに固着され、隣接の突極31,32との間には周方向の空隙が設けられている。尚、マグネット23は、そのそれぞれの外側面23aが同一円周上に位置するように構成されている。
The
第1及び第2突極31,32は、略扇状に径方向外側に突出する形状をなしており、湾曲形状をなす外側面31a,32aをそれぞれ有している。そして、第1及び第2突極31,32は、周方向においてその中央部が等間隔となるように配置されるとともに、それらの外側面31a,32aのロータ3の軸線Cを中心とする開角度Ykθ1,Ykθ2が互いに異なるように形成されている。尚、第1及び第2突極31,32の外側面31a,32aの開角度Ykθ1,Ykθ2は、軸方向において一定となっている。また、第1及び第2突極31,32の外側面31a,32aは、同一円周上に位置するように構成されるとともに、マグネット23の外側面23aよりも相対的に径方向内側に位置するように構成されている。
The first and second
ここで、ロータ3の第1突極31の開角度Ykθ1(又は第2突極32の開角度Ykθ2)を変化させていったときにその突極31(又は突極32)で生じるコギングトルクが正位相から逆位相に位相反転する境界角度を「α」とするとともに、コギングトルクが前記逆位相から前記正位相に位相反転する境界角度を「β」(但し、α<β)として、第1及び第2突極31,32の開角度Ykθ1,Ykθ2のいずれか一方が境界角度α未満、又は境界角度βより大きい値に設定されるとともに、他方がα以上、且つβ以下に設定されている。つまり、第1及び第2突極31,32の外側面31a,32aの開角度Ykθ1,Ykθ2は、その第1及び第2突極31,32で生じるコギングトルクが互いに位相反転するように設定されている。これにより、第1突極31で生じるコギングトルクが第2突極32で生じるコギングトルクにて抑えられるため、コギングトルクをより確実に低減することが可能となり、ロータ3の回転性能を向上させることができる。
Here, when the open angle Ykθ1 of the first
尚、本実施形態では、ティース12の先端部12aの周方向両端間の軸線Cを中心とする開角度を「Tθ(°)」、ティース12の個数を「L(個)」として、境界角度αは、「α=Tθ+(a−1)×360(°)/L」(但し「a」は自然数)、境界角度βは、「β=α+360(°)/L」となっている。これらの数式中の「360(°)/L」は、隣り合うティース12の先端部12aの周方向中央間の軸線Cを中心とする角度(換言すると、ティース12間の隙間の周方向中央間の軸線Cを中心とする角度)を示している。つまり、上記数式「α=Tθ+(a−1)×360(°)/L」の右辺は、周方向に連続する「a」個のティース12の周方向両端の軸線Cを中心とする角度を表している。即ち、境界角度αは、周方向に連続する「a」個のティース12の軸線Cを中心とする角度と等しく、境界角度βは、周方向に連続する「a+1」個のティース12の軸線Cを中心とする角度と等しくなっている。
In the present embodiment, the opening angle around the axis C between the circumferential ends of the
ここで、図4は「a=4」の場合を示しており、この場合、境界角度αは周方向に連続する4個のティース12の周方向両端の角度であり、境界角度βは周方向に連続する5個のティース12の周方向両端の角度となっている。そして、本実施形態では、第2突極32の外側面32aの開角度Ykθ2は境界角度α以下に設定され、第1突極31の外側面31aの開角度Ykθ1は境界角度α以上且つ境界角度β以下に設定される。これにより、第1及び第2突極31,32の外側面31a,32aの開角度Ykθ1,Ykθ2は、その第1及び第2突極31,32で生じるコギングトルクが互いに位相反転するように設定されている。
Here, FIG. 4 shows the case of “a = 4”. In this case, the boundary angle α is an angle at both ends in the circumferential direction of the four
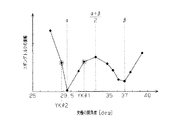
尚、本実施形態のステータ2では、ロータ3のマグネット23の個数(極対数)を「p」(但しpは2以上の整数)、セグメント巻線13の相数を「m」として、ティース12の個数「L」が、「L=2×p×m×n(個)」(但し「n」は自然数)となるように構成されている。そして、本実施形態では、この数式に基づいて、ティース12の個数「L」は、L=2×4(マグネット23の個数)×3(相数)×2=48(個)に設定されている。また、ティース12の開角度Tθは7(°)に設定されている。つまり、本実施形態では、境界角度αは29.5(°)、境界角度βは37(°)となっており(図2参照)、第2突極32の外側面32aの開角度Ykθ2は29.5(°)未満、第1突極31の外側面31aの開角度Ykθ1は29.5(°)以上且つ37(°)以下にそれぞれ設定される。
In the
また、第1及び第2突極31,32の開角度Ykθ1,Ykθ2は、第1及び第2突極31,32で生じるコギングトルクの振幅が互いに近い値となるように設定されることが望ましい。例えば図2及び図3に示すように、第1突極31の開角度Ykθ1は約31.7(°)、第2突極32の開角度Ykθ2は約28.8(°)にそれぞれ設定すれば、第1及び第2突極31,32で生じるコギングトルクは、位相が互いに反転、且つ振幅が略等しくなる。この場合、第1及び第2突極31,32で生じるコギングトルクが略打ち消し合うこととなり、モータ1全体のコギングトルク(第1及び第2突極31,32で生じるコギングトルクを合成したものであって、図3において実線の波形)が小さく抑えられるようになっている。
Further, it is desirable that the opening angles Ykθ1 and Ykθ2 of the first and second
更に、本実施形態では、第2突極32の外側面32aの開角度Ykθ2は境界角度α未満に設定されるとともに、第1突極31の外側面31aの開角度Ykθ1は、境界角度α以上、且つ{(α+β)/2}以下に設定されている。つまり、第1突極31の開角度Ykθ1は、境界角度α以上且つ境界角度β以下の範囲の中でも境界角度α,βの真ん中の角度よりも境界角度αよりに設定される。これにより、第1及び第2突極31,32で生じるコギングトルクの位相を互いに反転させつつも、第1及び第2突極31,32とマグネット23との周方向の間隔を大きく構成することが可能となるため、第1及び第2突極31,32とマグネット23との周方向の間隔が狭いことに起因する漏れ磁束を小さく抑えることが可能となっている。
Furthermore, in the present embodiment, the open angle Ykθ2 of the
次に、本実施形態の特徴的な作用効果を記載する。
(1)ロータ3の複数の突極は、周方向においてその中心部が等間隔にそれぞれ配置されるものであり、ロータ3の軸線Cを中心とする外側面31a,32aの開角度Ykθ1,Ykθ2が互いに異なる第1突極31(第1突極部)と第2突極32(第2突極部)とを含む。これにより、第1及び第2突極31,32でのコギングトルクが生じるタイミングにずれが生じるため、突極の開角度が均一な構成と比較してモータ1全体で生じるコギングトルクの低減が可能となり、ロータ3の回転性能を向上させることができる。
Next, characteristic effects of the present embodiment will be described.
(1) The center portions of the plurality of salient poles of the
(2)第1及び第2突極31,32の外側面31a,32aの開角度Ykθ1,Ykθ2のいずれか一方が境界角度α未満又は境界角度βよりも大きく設定されるとともに、他方が境界角度α以上、且つ境界角度β以下に設定される。これにより、第1及び第2突極31,32の外側面31a,32aの開角度が、その第1及び第2突極31,32で生じるコギングトルクが互いに位相反転するように設定される。従って、第1突極31で生じるコギングトルクが第2突極32で生じるコギングトルクにて抑えられるため、コギングトルクをより確実に低減することが可能となる。
(2) One of the open angles Ykθ1 and Ykθ2 of the
(3)第1及び第2突極31,32の外側面31a,32aの開角度Ykθ1,Ykθ2のいずれか一方が、境界角度α未満に設定されるとともに、他方が境界角度α以上、且つ{(α+β)/2}以下に設定される。即ち、開角度Ykθ1,Ykθ2のいずれか一方が境界角度α未満に設定され、他方が境界角度α以上且つ境界角度β以下の範囲の中でも境界角度α,βの真ん中の角度よりも境界角度αよりの角度に設定される。これにより、第1及び第2突極31,32で生じるコギングトルクの位相を互いに反転させつつも、第1及び第2突極31,32とマグネット23との周方向の間隔を大きく構成することが可能となるため、第1及び第2突極31,32とマグネット23との周方向の間隔が狭いことに起因する漏れ磁束を小さく抑えることが可能となる。
(3) One of the open angles Ykθ1 and Ykθ2 of the
尚、本発明の実施形態は、以下のように変更してもよい。
・上記実施形態では、第2突極32の開角度Ykθ2を境界角度α未満に設定し、第1突極31の開角度Ykθ1をα以上且つ{(α+β)/2}以下に設定したが、これに特に限定されるものではない。例えば、第1及び第2突極31,32の開角度Ykθ1,Ykθ2を互いに異なるように上記範囲外の角度に適宜変更してもよい。
In addition, you may change embodiment of this invention as follows.
In the above embodiment, the opening angle Ykθ2 of the second
また例えば、第2突極32の開角度Ykθ2を境界角度βよりも大きく設定しても、第1及び第2突極31,32で生じるコギングトルクの位相を互いに反転させることができる。この第2突極32の開角度Ykθ2を境界角度βよりも大きく設定した構成において、第1突極31の開角度Ykθ1を{(α+β)/2}以上、且つ境界角度β以下に設定すれば、第1及び第2突極31,32で生じるコギングトルクの位相を互いに反転させつつも、第1及び第2突極31,32とマグネット23との周方向の間隔を小さく構成することが可能となる。このため、第1及び第2突極31,32とマグネット23との周方向の間隔が広いことに起因するトルクの低減を抑えることが可能となる。
Further, for example, even if the opening angle Ykθ2 of the second
・上記実施形態では、数式「α=Tθ+(a−1)×360(°)/L」において「a=4」としたが、「a」を4以外の自然数に適宜変更してもよい。つまり、周方向に連続する例えば3個のティース12の周方向両端の角度を境界角度αとするとともに、周方向に連続する4個のティース12の周方向両端の角度を境界角度βとしてもよい。このように「a」が4以外の場合においても、上記実施形態と同様の効果を得ることができる。
In the above embodiment, “a = 4” is used in the formula “α = Tθ + (a−1) × 360 (°) / L”, but “a” may be appropriately changed to a natural number other than 4. That is, for example, the angles at the circumferential ends of the three
・上記実施形態では、ティース12の個数「L」は、数式「L=2×p×m×n(個)」(但し「n」は自然数)に基づき、60(個)に設定されたが、この数式におけるマグネット23の個数「p」、セグメント巻線13の相数「m」、自然数「n」を適宜変更してティース12の個数Lを変更してもよい。
In the above embodiment, the number “L” of the
上記実施形態では、第1突極31(第1突極部)と第2突極32(第2突極部)とを周方向に並設したが、これに特に限定されるものではない。
例えば、図5(a)(b)(c)に示すように、開角度Ykθ1の外側面41aを有する第1突極41が各マグネット23間に周方向等間隔に形成された第1ロータコアR1と、開角度Ykθ2の外側面42aを有する第2突極42が各マグネット23間に周方向等間隔に形成された第2ロータコアR2とを軸方向に積層してロータ3を構成してもよい(タンデム構造)。このような構成においても、上記実施形態と同様の効果を得ることができる。尚、図5に示す例では、ロータ3を第1ロータコアR1と第2ロータコアR2とからなる2段構成としたが、2段以上の構成としてもよい。例えば、図6に示すロータ3では3段構成となっており、軸方向両端のロータコアがそれぞれ第1ロータコアR1で構成され、軸方向中央のロータコアが第2ロータコアR2で構成されている。また、図5及び図6に示す多段構成の場合は、10磁極や14磁極等の奇数極対数(つまり、マグネット23の個数が奇数個)で構成してもよい。
In the said embodiment, although the 1st salient pole 31 (1st salient pole part) and the 2nd salient pole 32 (2nd salient pole part) were arranged in the circumferential direction, it is not specifically limited to this.
For example, as shown in FIGS. 5A, 5 </ b> B, and 5 </ b> C, the first rotor core R <b> 1 in which the first
また、突極の開角度を軸方向において一定とせずに、開角度が軸方向位置で異なる突極を設けてもよい。例えば、図7(a)(b)(c)(d)に示すロータ3では、各マグネット23間の突極51は、軸方向に先細りするような形状をなしており、その外側面51aの開角度はロータ3の軸方向一端3a側で開角度Ykθ1となっている。そして、ロータ3の軸方向他端3bに向かうにつれて開角度は小さくなっていき、ロータ3の軸方向他端3b側で開角度Ykθ2となっている。即ち、各突極51は、軸方向において開角度が互いに異なる第1突極部及び第2突極部を有している。このような構成によっても、上記実施形態と同様の作用効果を得ることができる。
Further, salient poles having different open angles at the axial positions may be provided without making the salient pole open angle constant in the axial direction. For example, in the
尚、図7に示す例では、突極51の開角度は、軸方向一端3aで最大、軸方向他端で最小となるように構成されているが、これ以外に例えば、図8(a)に示すように軸方向中央で最小、軸方向両端で最大となるように構成してもよい。また反対に、図8(b)に示すように、軸方向中央で最大、軸方向両端で最小となるように構成してもよい。また、図9に示すように、ロータコア22を多段構成として、段毎に開角度が変化する構成としてもよい。
In the example shown in FIG. 7, the opening angle of the
・上記実施形態では、ステータ2の巻線をセグメント巻線13としたが、特にこれに限定されるものではない。例えば、図10に示すモータ1aでは、ティース12の個数Lは、「L=p×m(個)」となるように構成され、同図では、L=4(マグネット23の個数)×3(相数)=12(個)に設定されている。そして、各ティース12には、導線(連続線)よりなる巻線Mが巻回されている。このようなモータ1aでは、ロータ3の磁極(8磁極)は、ティース12の数(12個)に対して2/3倍であり、ロータ3の磁極とティース12の数との比は2:3の関係になっている。
In the above embodiment, the winding of the
1,1a…モータ、2…ステータ、3…ロータ、12…ティース、22…ロータコア、23…マグネット、31,41…第1突極(第1突極部)、31a,32a,41a,42a,51a…外側面、32,42…第2突極(第2突極部)、51…突極、M…巻線、S…スロット、C…軸線、Ykθ1,Ykθ2…開角度、α,β…境界角度。
DESCRIPTION OF
Claims (5)
前記ロータの外周側に配置され、径方向に延び周方向に等間隔に設けられるティースを有するコアと前記ティースに装着された多相の巻線とを有するステータと
を備えたモータであって、
複数の前記突極は、周方向においてその中心部が等間隔にそれぞれ配置されるものであり、前記ロータの軸線を中心とする外側面の開角度が互いに異なる第1突極部と第2突極部とを含んで構成されており、
前記マグネットは、前記第1突極部及び前記第2突極部よりも周方向長さが大きいことを特徴とするモータ。 A plurality of magnets of one magnetic pole are arranged at equal intervals in the circumferential direction of the rotor core, and salient poles integrally formed with the rotor core are arranged with gaps between the magnets so that the salient pole functions as the other magnetic pole. A rotor configured to
A motor including a core that is disposed on an outer peripheral side of the rotor, extends in a radial direction, and has a core having teeth provided at equal intervals in a circumferential direction and a multiphase winding attached to the teeth,
The plurality of salient poles are arranged such that their central portions are arranged at equal intervals in the circumferential direction, and the first salient pole portion and the second salient pole are different from each other in the open angle of the outer surface centering on the axis of the rotor. and a pole portion is configured Nde including,
The motor has a circumferential length larger than that of the first salient pole part and the second salient pole part .
前記突極の外側面の開角度を変化させていったときにその突極で生じるコギングトルクが正位相から逆位相に位相反転する境界角度を「α」とするとともに、前記コギングトルクが前記逆位相から前記正位相に位相反転する境界角度を「β」(但し、α<β)として、
前記第1及び第2突極部のいずれか一方の外側面の開角度が、前記境界角度α未満又は前記境界角度βよりも大きく設定されるとともに、他方の外側面の開角度が、前記境界角度α以上、且つ前記境界角度β以下に設定されたことを特徴とするモータ。 The motor according to claim 1,
When the open angle of the outer surface of the salient pole is changed, the boundary angle at which the cogging torque generated at the salient pole reverses from the positive phase to the opposite phase is defined as “α”, and the cogging torque is The boundary angle at which the phase is inverted from the phase to the positive phase is “β” (where α <β),
The open angle of one of the first and second salient pole portions is set to be less than the boundary angle α or larger than the boundary angle β, and the open angle of the other outer surface is set to the boundary A motor characterized by being set to an angle α or more and the boundary angle β or less.
前記第1及び第2突極部のいずれか一方の外側面の開角度が、前記境界角度α未満に設定されるとともに、他方の外側面の開角度が、前記境界角度α以上、且つ{(α+β)/2}以下に設定されたことを特徴とするモータ。 The motor according to claim 2,
The opening angle of the outer surface of one of the first and second salient pole portions is set to be less than the boundary angle α, and the opening angle of the other outer surface is equal to or greater than the boundary angle α and {( [alpha] + [beta]) / 2} or less.
前記第1及び第2突極部のいずれか一方の外側面の開角度が、前記境界角度βより大きな値に設定されるとともに、他方の外側面の開角度が、{(α+β)/2}以上、且つ前記境界角度β以下に設定されたことを特徴とするモータ。 The motor according to claim 2,
The opening angle of one of the first and second salient pole portions is set to a value larger than the boundary angle β, and the opening angle of the other outer surface is {(α + β) / 2}. The motor is characterized by being set above and below the boundary angle β.
前記ステータの巻線が分布巻で構成されていることを特徴とするモータ。 The motor according to claim 1,
A motor, wherein the stator windings are distributed windings.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010148916A JP5587683B2 (en) | 2010-06-30 | 2010-06-30 | motor |
| CN201110170489.3A CN102290947B (en) | 2010-06-17 | 2011-06-14 | Motor |
| DE102011104118A DE102011104118A1 (en) | 2010-06-17 | 2011-06-14 | engine |
| US13/160,026 US9041269B2 (en) | 2010-06-17 | 2011-06-14 | Motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010148916A JP5587683B2 (en) | 2010-06-30 | 2010-06-30 | motor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012016128A JP2012016128A (en) | 2012-01-19 |
| JP5587683B2 true JP5587683B2 (en) | 2014-09-10 |
Family
ID=45601914
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010148916A Expired - Fee Related JP5587683B2 (en) | 2010-06-17 | 2010-06-30 | motor |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5587683B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5897939B2 (en) * | 2012-03-13 | 2016-04-06 | アスモ株式会社 | Rotor and motor |
| DE102012020895A1 (en) | 2011-10-28 | 2013-05-02 | Asmo Co., Ltd. | Rotor and motor |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH033622A (en) * | 1989-05-29 | 1991-01-09 | Sankyo Seiki Mfg Co Ltd | Armature of rotary electric machine |
| JP3804343B2 (en) * | 1999-06-29 | 2006-08-02 | 松下電器産業株式会社 | Motor core and motor using the same |
| JP2008178165A (en) * | 2007-01-16 | 2008-07-31 | Tokyo Univ Of Science | Bearingless motor |
-
2010
- 2010-06-30 JP JP2010148916A patent/JP5587683B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012016128A (en) | 2012-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9041269B2 (en) | Motor | |
| JP4626405B2 (en) | Brushless motor | |
| US8319386B2 (en) | Motor | |
| US8796897B2 (en) | Consequent pole permanent magnet motor | |
| JP6161707B2 (en) | Synchronous motor | |
| JP7302186B2 (en) | Rotating electric machine | |
| US8643239B2 (en) | Motor | |
| JP2014124092A (en) | Motor | |
| JP5601903B2 (en) | motor | |
| JP6388066B2 (en) | Brushless motor | |
| JP2012110213A (en) | Motor | |
| EP1244195A1 (en) | Winding scheme for a permanent magnet type three-phase ac rotary electric machine | |
| JP5483582B2 (en) | motor | |
| JP2014180193A (en) | Synchronous motor with high responsiveness | |
| JP5587683B2 (en) | motor | |
| JP2012016129A (en) | Rotor and motor | |
| JP2012080697A (en) | Motor | |
| JP2013207857A (en) | Brushless motor | |
| JP2011087382A (en) | Motor | |
| JP5491344B2 (en) | motor | |
| JPH08256461A (en) | Permanent magnet motor | |
| JP2013128378A (en) | Permanent magnet type rotary electric machine | |
| JP2012016127A (en) | Motor | |
| JP5394890B2 (en) | motor | |
| JP6100538B2 (en) | motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140722 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140724 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5587683 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |