JP5224048B2 - Suspension control device - Google Patents
Suspension control device Download PDFInfo
- Publication number
- JP5224048B2 JP5224048B2 JP2008254753A JP2008254753A JP5224048B2 JP 5224048 B2 JP5224048 B2 JP 5224048B2 JP 2008254753 A JP2008254753 A JP 2008254753A JP 2008254753 A JP2008254753 A JP 2008254753A JP 5224048 B2 JP5224048 B2 JP 5224048B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- motion
- vehicle body
- wheel
- vertical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000725 suspension Substances 0.000 title claims description 50
- 230000001133 acceleration Effects 0.000 claims description 372
- 230000033001 locomotion Effects 0.000 claims description 171
- 238000004364 calculation method Methods 0.000 claims description 100
- 238000013016 damping Methods 0.000 claims description 62
- 239000006096 absorbing agent Substances 0.000 claims description 42
- 230000035939 shock Effects 0.000 claims description 42
- 230000008859 change Effects 0.000 claims description 33
- 238000001514 detection method Methods 0.000 claims description 17
- 230000010354 integration Effects 0.000 claims description 14
- 230000007246 mechanism Effects 0.000 claims description 9
- 238000010586 diagram Methods 0.000 description 24
- 230000009467 reduction Effects 0.000 description 18
- 238000000034 method Methods 0.000 description 14
- 230000001629 suppression Effects 0.000 description 14
- 230000005540 biological transmission Effects 0.000 description 13
- 238000006073 displacement reaction Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 9
- 238000006243 chemical reaction Methods 0.000 description 7
- 230000004069 differentiation Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 6
- 238000004088 simulation Methods 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 239000013256 coordination polymer Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images
























Landscapes
- Vehicle Body Suspensions (AREA)
Description
本発明は、車両に用いられるサスペンション制御装置に関する。 The present invention relates to a suspension control device used in a vehicle.
車体の振動制御を行なうためには、車体の上下動や姿勢(ピッチ、ロールなど)、各車輪と車体との上下相対速度など、多くの情報が必要となる。各情報を得るためにそれぞれ専用のセンサを搭載すると、センサのコストが増大してしまうため、センサの数をできるだけ少なくすることが望ましい。
センサの数を少なくするには、例えば、振動制御以外の用途に用いられるセンサにより検出した値(例えば車輪の角速度)に基づき計算などにより他の値(例えば車輪と車体との相対速度)を推定する方法がある。このようにすれば、車両全体としてはセンサの数を少なくすることができる。具体的な例としては、特許文献1に示されるサスペンション制御装置が挙げられる。
In order to reduce the number of sensors, for example, other values (for example, relative speed between the wheel and the vehicle body) are estimated by calculation based on a value (for example, angular velocity of the wheel) detected by a sensor used for applications other than vibration control. There is a way to do it. In this way, the number of sensors can be reduced as a whole vehicle. As a specific example, there is a suspension control device disclosed in
特許文献1に記載のサスペンション制御装置においても、センサの数を減らすことはできているが、センサの数を少なくするというニーズは依然として存在する。
Even in the suspension control device described in
本発明は、上記事情に鑑みてなされたものであり、本発明の目的は、センサの数を少なくしたサスペンション制御装置を提供することである。 The present invention has been made in view of the above circumstances, and an object of the present invention is to provide a suspension control device with a reduced number of sensors.
本発明は、車両の車体と車輪との間に介装されて外部からの指令により減衰特性が変化する減衰力調整式緩衝器と、その減衰特性を制御する制御装置とからなるサスペンション制御装置であって、前記制御装置は、前記車体の任意の位置に設定される第1点の上下運動を算出する第1の上下運動算出手段と、前記車体のロール運動を推定するロール運動推定手段と、前記車体のピッチ運動を推定するピッチ運動推定手段と、前記上下運動、前記ロール運動および前記ピッチ運動から前記車体の各部の上下運動を算出する各部上下運動算出手段と、前記各部の上下運動に応じて指令を算出し、前記指令を前記減衰力調整式緩衝器に送るコントローラとからなり、前記ピッチ運動推定手段は、前記車輪の回転を検出し、当該検出結果から車輪速時間変化率を算出する車輪速時間変化率算出手段と、前記車輪の回転を用いずに前記車体の前後加速度を検出または推定する前後加速度取得手段と、
前記車輪速時間変化率算出手段で算出した車輪速度時間変化率と前後加速度取得手段で取得した前後加速度との差からピッチレートを算出する減算手段とからなることを特徴とする。
The present invention is a suspension control device that includes a damping force adjusting type shock absorber that is interposed between a vehicle body and wheels of a vehicle and whose damping characteristics change according to an external command, and a control device that controls the damping characteristics. The control device includes: first vertical motion calculation means for calculating the vertical motion of the first point set at an arbitrary position of the vehicle body; roll motion estimation means for estimating the roll motion of the vehicle body; According to the pitch motion estimation means for estimating the pitch motion of the vehicle body, the vertical motion calculation means for calculating the vertical motion of each part of the vehicle body from the vertical motion, the roll motion and the pitch motion, and the vertical motion of the respective parts and calculates a command Te, consists of a controller sending the command to the damping force adjustable shock absorber, said pitch motion estimating means detects the rotation of the wheel, when the wheel speed from the detection result A wheel speed time rate of change calculating means for calculating a change rate, and the longitudinal acceleration acquisition means for detecting or estimating the longitudinal acceleration of the vehicle body without using the rotation of the wheel,
It is characterized by comprising subtracting means for calculating the pitch rate from the difference between the wheel speed time change rate calculated by the wheel speed time change rate calculating means and the longitudinal acceleration acquired by the longitudinal acceleration acquiring means .
本発明によれば、センサの数を少なくしたサスペンション制御装置を提供することができる。 According to the present invention, it is possible to provide a suspension control device with a reduced number of sensors.
次に、本発明の実施形態について説明する。
<第1実施形態>
まず、第1の実施形態のサスペンション制御装置は、車体と車輪との間に介装されて外部からの指令により減衰特性が変化する減衰力調整式緩衝器と、その減衰特性を制御する制御装置とからなるサスペンション制御装置であって、前記制御装置は、前記車体の任意の位置に設定される第1点の上下運動を算出する第1の上下運動算出手段と、前記車体のロール運動を推定するロール運動推定手段と、前記車体のピッチ運動を推定するピッチ運動推定手段と、前記上下運動、前記ロール運動および前記ピッチ運動から前記車体の各部の上下運動を算出する各部上下運動算出手段と、前記各部の上下運動に応じて指令を算出し、前記指令を前記減衰力調整式緩衝器に送るコントローラとからなり、前記ピッチ運動推定手段は、前記車輪の回転を算出する車輪回転算出手段と、前記車体の前後運動を算出する前後運動算出手段と、前記車輪回転と前記前後運動との差からピッチレートを算出する減算手段とからなることを特徴とする。
ここで、「上下運動」、「ロール運動」、「ピッチ運動」とは、それぞれ上下方向、ピッチ方向、ロール方向の運動に関する物理量をいい、上下変位、ロール角速度(ロールレート)、ピッチ角加速度などを含む。「車輪の回転」とは、車輪の回転運動に関わる物理量をいい、角速度、車輪速(角速度に車輪の有効半径を乗じたもの)、角加速度などを含む。「車輪回転算出手段」とは、車輪の回転を算出する機構をいい、車輪速センサ、角度センサなどを含む。「車体の前後運動」とは、車体の前後運動に関わる物理量をいい、車体速度、車体加速度などを含む。「前後運動算出手段」とは、車体の前後運動を算出する機構をいい、速度センサ、加速度センサなどを含む。
本実施形態のサスペンション制御装置は、車輪回転の次元と前後運動の次元が異なっている場合、次元を同一に変換する次元変換手段を有してもよい。両者の差を求める前に次元を同一に変換することで推定精度が向上する。このような次元変換手段としては、微分器、積分器などがある。ここで、「次元」とは、任意の物理量を時間(T)、長さ(L)、質量(M)の積として表現したものをいい、例えば加速度は「L・M-2」と表す。
本実施形態のサスペンション制御装置は、車輪回転、車体運動およびこれらの差のうち少なくとも1つに所定の係数を乗じる換算手段を有してもよい。例えば、車輪速と車体速度との差からピッチレートを求める場合、この差は、ピッチレートに比例する値であって、ピッチレートそのものの値ではない。したがって、この差に所定の係数を乗じてピッチレートに換算すれば、その後の計算を簡単にすることができる。
また、本実施形態のサスペンション制御装置は、車両が車体の左右に一対の車輪を有する場合、これら一対の車輪の車輪回転の平均値を車輪回転として用いてもよい。右または左の車輪のみの車輪回転を用いる場合よりも、ピッチ運動(例えばピッチレート)の推定精度を向上することができる。
さらに、本実施形態のサスペンション制御装置は、車両が車体の左右に一対の車輪を有する場合、これら一対の車輪の車輪回転が逆位相のときは、ピッチ運動を算出しないようにすることができる。逆位相のときは、走行している路面が荒れており、ピッチ運動の推定精度が低下することがあるため、精度の低い推定の実行を避けることができる。
また、本実施形態のサスペンション制御装置は、車両がその駆動力が作用する駆動輪と駆動力が作用しない従動輪とからなる場合に、車輪回転を従動輪の回転から算出するように構成することができる。従動輪は、車輪速の変動分が駆動力による影響を受けにくいため、駆動輪の回転から算出する構成と比較して、ピッチ運動の推定精度を向上させることができる。
本実施形態のサスペンション制御装置は、前後運動を前後加速度センサの出力から求めることができる。直接検出された前後加速度から前後運動を算出するため、推定精度を向上することができる。この前後加速度センサを、スリップ制御など他の用途と共用すれば、コストを削減できる。
本実施形態のサスペンション制御装置は、車両が原動機のトルクを検出する原動機トルク検出手段を有している場合は、この出力から前後運動を求めてもよい。ここで、「原動機」は一般的なガソリンエンジンのほか、ディーゼルエンジン、電気モーターなど、車両を駆動するものをいう。
原動機と車輪との間に各種のトランスミッション(MT、AT、CVTなど)が介在する場合は、原動機トルク検出手段の出力と原動機から車輪までの総減速比との積から前後運動を求めてもよい。
車両がトルクコンバータを有する場合、前後運動は、トルクコンバータのロックアップおよびすべりに応じた係数を乗じて求めてもよい。このように構成すれば、ピッチ運動の推定精度を向上させることができる。
前後運動は、前記車体に作用する外力(例えば、空気抵抗)を考慮してもよい。
また、本実施形態のサスペンション制御装置は、車両が制動機構を有する場合、前後運動は、制動機構が発生する制動力から求めてもよい。
制動機構が液圧式ディスクブレーキである場合は、前後運動は、液圧式ディスクブレーキの液圧から求めることができる。
前後運動には、算出する際の上限値を設定してもよい。これは、制動により車輪がロックした場合、液圧による推定加速度が実際の加速度よりも大きくなることによるものである。したがって、上限値としては、制動ロックが生じた場合の加速度に基づいて定めるとよい。
制動機構が回生ブレーキである場合は、前後運動は、制動時に回生ブレーキが発生する電力から求めることができる。
また、本実施形態のサスペンション制御装置は、前後運動は、GPSによる前記車両の位置情報から求めてもよい。例えば、所定の時間間隔における移動距離から車両の速度が求められる。
本実施形態のサスペンション制御装置は、前記制御装置が積分手段を有していてもよい。そして、前記上下運動算出手段は前記車体の点の上下加速度を算出し、前記ロール運動推定手段は前記車体のロール加速度を推定し、前記ピッチ運動推定手段は前記車体のピッチ加速度を推定し、前記各部上下運動算出手段は前記上下加速度、前記ロール加速度および前記ピッチ加速度から前記車体の各部の上下加速度を算出し、前記積分手段は前記各部の上下加速度を積分して前記各部の上下速度を算出し、前記コントローラは前記各部の上下速度に応じて指令を算出し、前記指令を前記減衰力調整式緩衝器に送る構成とすることができる。このようにすると、例えば、上下運動算出手段として上下加速度センサを用いた場合は、上下速度を用いて車体の各部の上下速度を算出する構成と比較して、推定精度の向上が期待できる。なぜなら、上下加速度センサの出力を微分器を通すことなく、そのまま利用して算出できるから、微分器を通すことによる誤差を回避できるからである。
また、本実施形態のサスペンション制御装置は、前記車体のピッチ方向と異なる方向であるワープ方向に前記第1点から離れた位置に設定される第2点の上下運動を算出する第2の上下運動算出手段と、前記第1点の上下運動および第2点の上下運動からワープ運動を算出するワープ運動算出手段とを有し、前記ロール運動推定手段は、前記ワープ運動と前記ピッチ運動の差から前記車体のロール運動を推定するように構成してもよい。このような構成とすると、例えば、ヘッドライトの照射する軸を推定するために搭載される後輪付近に搭載される車高センサからの出力を流用できるので、車両のセンサ数を少なくすることができる。
同様に、本実施形態のサスペンション制御装置は、前記車体のロール方向と異なる方向であるワープ方向に前記第1点から離れた位置に設定される第2点の上下運動を算出する第2の上下運動算出手段と、前記第1点の上下運動および第2点の上下運動からワープ運動を算出するワープ運動算出手段とを有し、前記ピッチ運動推定手段は、前記ワープ運動と前記ロール運動の差から前記車体のピッチ運動を推定するように構成してもよい。このような構成とすると、例えば、ヘッドライトの照射する軸を推定するために搭載される後輪付近に搭載される車高センサからの出力を流用できるので、車両のセンサ数を少なくすることができる。
<第2実施形態>
次に、より具体的に、本発明に係る第2実施形態のサスペンション制御装置を、図1〜図6に基づいて説明する。
図1は、本発明の第2実施形態のサスペンション制御装置を備えた車両の部品レイアウトを模式的に示す斜視図である。図2は、図1のコントローラの制御機能を説明するためのブロック図である。図3は、図2の前後加速度推定手段を示すブロック図である。図4は、図3のエンジンによる前後加速度推定部の制御機能を説明するためのブロック図である。図5は、図3のブレーキ液圧による前後加速度推定部の制御機能を説明するためのブロック図である。図6は、図3の空気抵抗による前後加速度推定部の制御機能を説明するためのブロック図である。
Next, an embodiment of the present invention will be described.
<First Embodiment>
First, a suspension control device according to a first embodiment includes a damping force adjustment type shock absorber that is interposed between a vehicle body and a wheel and changes a damping characteristic according to a command from the outside, and a control device that controls the damping characteristic. The suspension control device comprises: a first vertical motion calculation means for calculating a vertical motion of a first point set at an arbitrary position of the vehicle body; and a roll motion of the vehicle body is estimated. Roll motion estimating means, pitch motion estimating means for estimating the pitch motion of the vehicle body, each part vertical motion calculating means for calculating the vertical motion of each part of the vehicle body from the vertical motion, the roll motion and the pitch motion, A controller that calculates a command according to the vertical motion of each part and sends the command to the damping force adjustment type shock absorber; and the pitch motion estimation means is configured to rotate the wheel. A wheel rotation calculating means for output, characterized in that it consists of a longitudinal motion calculating means, and subtraction means for calculating a pitch rate from a difference between the before and after exercise and the wheel rotation to calculate the longitudinal movement of the vehicle body.
Here, “vertical motion”, “roll motion”, and “pitch motion” refer to physical quantities relating to motion in the vertical direction, pitch direction, and roll direction, respectively, vertical displacement, roll angular velocity (roll rate), pitch angular acceleration, etc. including. “Rotation of wheel” refers to a physical quantity related to the rotational motion of the wheel, and includes angular velocity, wheel speed (angular velocity multiplied by effective wheel radius), angular acceleration, and the like. “Wheel rotation calculating means” refers to a mechanism for calculating wheel rotation, and includes a wheel speed sensor, an angle sensor, and the like. The “front-rear motion of the vehicle body” refers to a physical quantity related to the front-rear motion of the vehicle body, and includes vehicle body speed, vehicle body acceleration, and the like. “Longitudinal motion calculation means” refers to a mechanism that calculates the longitudinal motion of the vehicle body, and includes a speed sensor, an acceleration sensor, and the like.
The suspension control device according to the present embodiment may include dimension conversion means for converting the dimensions to the same when the dimension of the wheel rotation and the dimension of the longitudinal motion are different. The estimation accuracy is improved by converting the dimensions to the same before obtaining the difference between the two. Examples of such dimension conversion means include a differentiator and an integrator. Here, “dimension” means an arbitrary physical quantity expressed as a product of time (T), length (L), and mass (M). For example, acceleration is expressed as “L · M −2 ”.
The suspension control device according to the present embodiment may include a conversion unit that multiplies at least one of wheel rotation, body movement, and a difference between them by a predetermined coefficient. For example, when the pitch rate is obtained from the difference between the wheel speed and the vehicle body speed, this difference is a value proportional to the pitch rate and not the value of the pitch rate itself. Therefore, if this difference is multiplied by a predetermined coefficient and converted into a pitch rate, the subsequent calculation can be simplified.
Moreover, when the vehicle has a pair of wheels on the left and right sides of the vehicle body, the suspension control device of the present embodiment may use an average value of the wheel rotations of the pair of wheels as the wheel rotation. The estimation accuracy of pitch motion (for example, pitch rate) can be improved as compared with the case of using wheel rotation of only the right or left wheel.
Furthermore, when the vehicle has a pair of wheels on the left and right sides of the vehicle body, the suspension control device of the present embodiment can prevent the pitch motion from being calculated when the wheel rotations of the pair of wheels are in opposite phases. When the phase is opposite, the running road surface is rough and the estimation accuracy of the pitch motion may be reduced, so that it is possible to avoid the estimation with low accuracy.
In addition, the suspension control device of the present embodiment is configured to calculate the wheel rotation from the rotation of the driven wheel when the vehicle includes a driving wheel on which the driving force acts and a driven wheel on which the driving force does not act. Can do. Since the follower wheel is less affected by the driving force due to the fluctuation of the wheel speed, it is possible to improve the estimation accuracy of the pitch motion as compared with the configuration calculated from the rotation of the drive wheel.
The suspension control device according to the present embodiment can determine the longitudinal motion from the output of the longitudinal acceleration sensor. Since the longitudinal motion is calculated from the directly detected longitudinal acceleration, the estimation accuracy can be improved. If this longitudinal acceleration sensor is shared with other applications such as slip control, the cost can be reduced.
When the vehicle has a motor torque detecting means for detecting the torque of the prime mover, the suspension control device of the present embodiment may determine the longitudinal motion from this output. Here, the “motor” refers to a general gasoline engine, a diesel engine, an electric motor, or the like that drives a vehicle.
When various transmissions (MT, AT, CVT, etc.) are interposed between the prime mover and the wheels, the longitudinal motion may be obtained from the product of the output of the prime mover torque detection means and the total reduction ratio from the prime mover to the wheels. .
When the vehicle has a torque converter, the longitudinal motion may be obtained by multiplying a coefficient corresponding to the lock-up and slip of the torque converter. If comprised in this way, the estimation precision of a pitch motion can be improved.
The back-and-forth motion may take into account an external force (for example, air resistance) acting on the vehicle body.
In the suspension control device of the present embodiment, when the vehicle has a braking mechanism, the longitudinal motion may be obtained from the braking force generated by the braking mechanism.
When the braking mechanism is a hydraulic disc brake, the longitudinal motion can be obtained from the hydraulic pressure of the hydraulic disc brake.
An upper limit value for calculation may be set for the back-and-forth motion. This is because when the wheel is locked by braking, the estimated acceleration due to the hydraulic pressure becomes larger than the actual acceleration. Therefore, the upper limit value may be determined based on the acceleration when the braking lock occurs.
When the braking mechanism is a regenerative brake, the back-and-forth motion can be obtained from the electric power generated by the regenerative brake during braking.
Moreover, the suspension control apparatus of this embodiment may obtain | require a back-and-forth motion from the positional information on the said vehicle by GPS. For example, the speed of the vehicle is obtained from the moving distance at a predetermined time interval.
In the suspension control device according to the present embodiment, the control device may include integration means. The vertical motion calculation means calculates vertical acceleration of the point of the vehicle body, the roll motion estimation means estimates roll acceleration of the vehicle body, the pitch motion estimation means estimates pitch acceleration of the vehicle body, Each part vertical motion calculation means calculates the vertical acceleration of each part of the vehicle body from the vertical acceleration, the roll acceleration and the pitch acceleration, and the integration means calculates the vertical speed of each part by integrating the vertical acceleration of each part. The controller may be configured to calculate a command according to the vertical speed of each unit and to send the command to the damping force adjusting shock absorber. In this way, for example, when a vertical acceleration sensor is used as the vertical motion calculation means, an improvement in estimation accuracy can be expected as compared with a configuration in which the vertical speed of each part of the vehicle body is calculated using the vertical speed. This is because the output of the vertical acceleration sensor can be calculated by using it as it is without passing through a differentiator, so that an error caused by passing through the differentiator can be avoided.
In addition, the suspension control device of the present embodiment calculates a second vertical motion that calculates a vertical motion of a second point set at a position away from the first point in a warp direction that is different from the pitch direction of the vehicle body. Calculating means, and warp motion calculating means for calculating a warp motion from the vertical motion of the first point and the vertical motion of the second point, and the roll motion estimating means is based on a difference between the warp motion and the pitch motion. You may comprise so that the roll motion of the said vehicle body may be estimated. With such a configuration, for example, since the output from the vehicle height sensor mounted near the rear wheel mounted for estimating the axis irradiated by the headlight can be diverted, the number of sensors of the vehicle can be reduced. it can.
Similarly, the suspension control apparatus according to the present embodiment calculates the second up-and-down motion of the second point that is set at a position away from the first point in the warp direction that is different from the roll direction of the vehicle body. Motion calculating means, and warp motion calculating means for calculating a warp motion from the vertical motion of the first point and the vertical motion of the second point, and the pitch motion estimating means is a difference between the warp motion and the roll motion. From this, the pitch motion of the vehicle body may be estimated. With such a configuration, for example, since the output from the vehicle height sensor mounted near the rear wheel mounted for estimating the axis irradiated by the headlight can be diverted, the number of sensors of the vehicle can be reduced. it can.
Second Embodiment
Next, the suspension control device according to the second embodiment of the present invention will be described more specifically with reference to FIGS.
FIG. 1 is a perspective view schematically showing a component layout of a vehicle including a suspension control device according to a second embodiment of the present invention. FIG. 2 is a block diagram for explaining a control function of the controller of FIG. FIG. 3 is a block diagram showing the longitudinal acceleration estimation means of FIG. FIG. 4 is a block diagram for explaining a control function of the longitudinal acceleration estimation unit by the engine of FIG. FIG. 5 is a block diagram for explaining a control function of the longitudinal acceleration estimation unit based on the brake fluid pressure in FIG. FIG. 6 is a block diagram for explaining a control function of the longitudinal acceleration estimation unit based on the air resistance of FIG.
図1及び図2において、第1実施形態のサスペンション制御装置1は、駆動方式が後輪駆動〔フロントエンジン・リアドライブ(FR)〕で、トランスミッションがAT(オートマチック・トランスミッション)とされた車両2に用いられる。車両2の各車輪〔前左右輪3FL,3FR、後左右輪3RL,3RR〕には、減衰力調整式緩衝器(以下、適宜、ショックアブソーバともいう。)4FL,4FR、4RL,4RRが取り付けられている。本実施形態の車両2は後輪駆動とされており、前左右輪3FL,3FRが従動輪となっている。そして、前左右輪3FL,3FR(従動輪)には、パワートレインとつながっている後輪と比べて、ピッチ運動に伴う車輪速の変化が現れやすい。本実施形態では、ショックアブソーバ4FL,4FR、4RL,4RR(以下、適宜、ショックアブソーバ4と総称する。)がサスペンション機構を構成している。
ショックアブソーバ4の外周にはスプリング5が取付けられている。前記各車輪(前左右輪3FL,3FR、後左右輪3RL,3RR)を以下、適宜、車輪(適宜、タイヤともいう。)3と総称する。
スプリング5は、車体6と各車輪3との間に設けられ、車体6を支持している。
1 and 2, the
A
The
車両2には、CAN(Controller Area Network、車両2ネットワーク)が備えられており、車両2に既存のものとして備えられている前2輪(前左右輪3FL,3FR)に対する車輪速センサ7FL,7FR及び図示しない各種検出手段〔車速検出手段、エンジントルク検出手段、ギア位置検出手段、液圧検出手段〕からの夫々の信号がCANを経由して制御装置8に入力される。
前記各種検出手段からの夫々の信号(又は情報)は、前記各種検出手段から出力される前左右輪3FL,3FRの車輪速vcFL,vcFR、車速ν、エンジントルクTe、ギア位置Pg、ブレーキマスタシリンダ液圧Pmを示す信号(又は情報)である。この信号(又は情報)については、適宜、その内容を示す符号で示す。例えば車速信号ν(又は車速情報ν)、エンジントルク信号Te(エンジントルク情報Te)のように表示する。車輪速vcFL,vcFRを示す信号(又は情報)を含み、後述する他の信号(又は情報)についても同様に表示する。
The
Each of the signals from the various detection means (or information), the various pre-output from the detection means the left and right wheels 3FL, wheel speeds vc FL of 3FR, vc FR, the vehicle speed [nu, engine torque T e, the gear position P g a signal indicating a brake master cylinder pressure P m (or information). About this signal (or information), it shows with the code | symbol which shows the content suitably. For example, a vehicle speed signal ν (or vehicle speed information ν) and an engine torque signal Te (engine torque information Te ) are displayed. Including the signals (or information) indicating the wheel speeds vc FL and vc FR , other signals (or information) described later are displayed in the same manner.
制御装置8は、予め定められた制御プログラムに基づいて後述する演算処理を実行し、この演算処理において前記入力を受けたデータを用いることにより得られる制御指令値を出力し、ショックアブソーバ4の減衰力特性を制御する。
この実施形態では、後述するように、車体6の前後方向の加速度を、CANから取得可能な信号を用いて前後加速度を推定するようにしている。そのため、専用のセンサを搭載する必要がなく、コストを低減できている。
The
In this embodiment, as will be described later, the longitudinal acceleration of the vehicle body 6 is estimated using a signal that can be acquired from CAN. Therefore, it is not necessary to install a dedicated sensor, and the cost can be reduced.
次に、制御装置8の構成及び前記演算処理内容を、図2〜図6に基づいて説明する。
制御装置8は、図2に示すように、前後運動算出手段の一例である前後加速度推定手段20(前後加速度取得手段)と、ピッチレート推定手段21と、ピッチレート推定手段21からのピッチレートに基づいて前記制御指令値を発生し、当該制御指令値をショックアブソーバ4に出力する制御指令算出手段22と、から構成されている。
前後加速度推定手段20に代えて、前後加速度を検出する前後加速度センサを用いてもよい。車両2に前後加速度センサが搭載されている場合は、CANを通じてその出力値を利用することができる。
Next, the configuration of the
As shown in FIG. 2, the
Instead of the longitudinal acceleration estimation means 20, a longitudinal acceleration sensor that detects longitudinal acceleration may be used. When the longitudinal acceleration sensor is mounted on the
前後加速度推定手段20は、図2、図3に示すように、エンジンによる前後加速度推定部(以下、エンジン起因前後加速度推定部という。)25と、ブレーキマスタシリンダ液圧Pmによる前後加速度推定部(以下、液圧起因前後加速度推定部という。)26と、空気抵抗による前後加速度推定部(以下、空気抵抗起因前後加速度推定部という。)27と、第1、第2加算部28,29と、推定前後加速度切替部30と、を備えており、後述するようにして車速ν、エンジントルクTe、ギア位置Pg、及びブレーキマスタシリンダ液圧Pmに基づいて車体6の前後加速度を推定する。この推定により得られた前後加速度を、以下、便宜上、推定前後加速度aesという。推定前後加速度aesは、ピッチレート推定手段21に入力される。
As shown in FIGS. 2 and 3, the longitudinal acceleration estimation means 20 includes an engine longitudinal acceleration estimation unit (hereinafter referred to as an engine-derived longitudinal acceleration estimation unit) 25 and a longitudinal acceleration estimation unit based on the brake master cylinder hydraulic pressure P m. (Hereinafter referred to as hydraulic pressure-induced longitudinal acceleration estimation unit) 26, longitudinal resistance estimation unit based on air resistance (hereinafter referred to as air resistance-induced longitudinal acceleration estimation unit) 27, and first and
ピッチレート推定手段21は、車輪速時間変化率算出手段31と、演算手段32と、を備えている。車輪速時間変化率算出手段31は、前左右輪3FL,3FR(従動輪)の車輪速センサ7FL,7FRから車輪速の入力を受け、前左右輪3FL,3FRの車輪速センサ7FL,7FRの車輪速vcFL,vcFRの平均値〔(vcFL+vcFR)/2〕を求め、この平均値の時間変化率〔以下、車輪速時間変化率という。〕を算出(推定)する。車輪速時間変化率算出手段31は、微分器であり、車輪速センサ7FL,7FRの車輪速に対して微分処理を行なうことにより時間変化率を求める。車輪速時間変化率算出手段31は、本発明における次元変換手段を構成している。
なお、車輪速時間変化率の算出(推定)に際し、車輪速vcFL,vcFRの時間変化率を夫々算出し、その平均値を車輪速時間変化率として求めるようにしてもよい。また、車輪速時間変化率は1つの車輪のみから求めてもよい。この場合、計算の負荷が軽減される。
The pitch rate estimating means 21 includes a wheel speed time change rate calculating means 31 and a calculating means 32. The wheel speed time change rate calculating means 31 receives wheel speed input from the wheel speed sensors 7FL, 7FR of the front left and right wheels 3FL, 3FR (driven wheels), and the wheel speed sensors 7FL, 7FR of the front left and right wheels 3FL, 3FR. An average value [(vc FL + vc FR ) / 2] of the speeds vc FL and vc FR is obtained, and a time change rate of the average value (hereinafter referred to as a wheel speed time change rate). ] Is calculated (estimated). The wheel speed time change rate calculating means 31 is a differentiator, and obtains the time change rate by performing a differentiation process on the wheel speeds of the wheel speed sensors 7FL and 7FR. The wheel speed time change rate calculating means 31 constitutes a dimension converting means in the present invention.
In calculating (estimating) the wheel speed time change rate, the time change rates of the wheel speeds vc FL and vc FR may be calculated, and the average value may be obtained as the wheel speed time change rate. The wheel speed time change rate may be obtained from only one wheel. In this case, the calculation load is reduced.
演算手段32は、車輪速時間変化率から前後加速度推定手段20が出力する推定前後加速度aesを減算〔車輪速時間変化率−推定前後加速度aes〕し、この減算により得られたデータを積分してピッチレートを得、これを制御指令算出手段22に出力する。
前記「車輪速時間変化率−推定前後加速度aes」の減算処理を行うことによりエンジンやブレーキによる車体6の加減速の影響がキャンセルされるので、エンジンやブレーキによる車体6の加減速影響に関わらず、常に車両2のピッチ運動を推定することができ、良好な振動抑制制御を行なうことができる。
The calculation means 32 subtracts the estimated longitudinal acceleration a es output from the longitudinal acceleration estimation means 20 from the wheel speed time change rate [wheel speed time change rate−estimated longitudinal acceleration a es ], and integrates the data obtained by this subtraction. The pitch rate is obtained, and this is output to the control command calculation means 22.
Since the effect of acceleration / deceleration of the vehicle body 6 by the engine or brake is canceled by performing the subtraction process of “wheel speed time change rate−estimated longitudinal acceleration a es ”, Therefore, the pitch motion of the
また、急激な車体6の加減速に関わらず、常に車両2のピッチ運動を推定することができるため、ピッチ運動に応じてショックアブソーバ4の減衰係数を制御することで、車両2のピッチを効果的に抑制できる。
また、ピッチレート推定手段21は、車体6の加減速の影響がキャンセルされるので、ピッチレートの推定精度を向上できることになる。
また、CAN(車両ネットワーク)から前後加速度が得られない場合、別システムのECUからCANを通じて得られる各種信号を用いて前後加速度を推定し、車輪加速度から前後加速度を減算することで、コストアップせずに、エンジンやブレーキによる車体6の加減速影響に関わらず、車両2のピッチ運動を推定することができる。
In addition, since the pitch motion of the
In addition, since the influence of the acceleration / deceleration of the vehicle body 6 is canceled, the pitch rate estimation means 21 can improve the estimation accuracy of the pitch rate.
If longitudinal acceleration cannot be obtained from the CAN (vehicle network), the longitudinal acceleration is estimated using various signals obtained from the ECU of another system through CAN, and the cost is increased by subtracting the longitudinal acceleration from the wheel acceleration. In addition, the pitch motion of the
また、ピッチレート推定手段21は、前左右輪3FL,3FRの車輪速センサ7FL,7FR、すなわち従動輪の車輪速を用いてピッチレートを算出している。このため、パワートレインとつながっている後輪(駆動輪)の車輪速を用いる場合と異なり、ピッチ運動に伴う車輪速の変化をより顕著に把握することができ、算出精度が向上し、これに伴い振動抑制の制御精度の向上を図ることができる。 The pitch rate estimating means 21 calculates the pitch rate using the wheel speed sensors 7FL and 7FR of the front left and right wheels 3FL and 3FR, that is, the wheel speeds of the driven wheels. For this reason, unlike the case of using the wheel speed of the rear wheel (drive wheel) connected to the power train, the change in the wheel speed accompanying the pitch motion can be grasped more significantly, and the calculation accuracy is improved. Accordingly, it is possible to improve the control accuracy of vibration suppression.
エンジン起因前後加速度推定部25では、CANを経由して得られるエンジントルクTeとギア位置Pgにより、エンジンによる前後加速度(以下、エンジン起因前後加速度という。)aegを算出する。
液圧起因前後加速度推定部26では、CANを経由して得られるブレーキマスタシリンダ圧力Pmにより、ブレーキによる前後加速度(以下、ブレーキ起因前後加速度という。)abkを算出する。
空気抵抗起因前後加速度推定部27では、CANを経由して得られる車速νより、空気抵抗による前後加速度(以下、空気抵抗起因前後加速度という。)aarを算出する。
In the engine due longitudinal
The hydraulic pressure-induced
The air resistance-induced longitudinal
第1加算部28は、空気抵抗起因前後加速度aar及びブレーキ起因前後加速度abkを加算して第2加算部29に出力する。第2加算部29は、第1加算部28の出力データ(aar+abk)及びエンジン起因前後加速度aegを加算し、この加算により得られたデータ(aar+abk+aeg)を合計前後加速度atoとして推定前後加速度切替部30に出力する。
推定前後加速度切替部30は、車速νが0km/hであるか、又は0km/hより大であるかの判定を行い、車速νが0km/hであると判定すれば、推定前後加速度aesを0〔m/s2〕に設定して、これをピッチレート推定手段21に出力する。また、車速νが0km/hより大であると判定すれば、推定前後加速度aesとして第2加算部29からの合計前後加速度atoを設定し、これを、ピッチレート推定手段21に出力する。
The
The estimated longitudinal
エンジン起因前後加速度推定部25は、図4に示すように、AT減速比算出手段34、最終減速比積算部35、タイヤ半径割算部36、動力伝達効率乗算部37、及び車体質量割算部38を備えている。そして、エンジン起因前後加速度推定部25は、エンジンの回転が駆動輪に伝えられた場合、駆動輪外周での駆動力は、一般的に次式(1)で表され、さらに車体質量を考慮することにより、エンジン駆動の影響に起因して生じる前後加速度、すなわちエンジン起因前後加速度は、式(2)で表されることを利用し、エンジン起因前後加速度aegを算出する。
このエンジン起因前後加速度aegの算出方法を以下に説明する。
すなわち、駆動輪外周での駆動力P〔N〕は、一般的に次式(1)で表される。
As shown in FIG. 4, the engine-induced longitudinal
A method of calculating the engine-derived longitudinal acceleration a eg will be described below.
That is, the driving force P [N] on the outer periphery of the driving wheel is generally expressed by the following equation (1).
P=i×nt×Te/Rt〔N〕 … (1)
i:総減速比
nt:動力伝達効率
Te:エンジントルク〔Nm〕
Rt:タイヤ(車輪3)の半径〔m〕
P = i * nt * Te / Rt [N] (1)
i: Total reduction ratio nt : Power transmission efficiency Te : Engine torque [Nm]
R t : radius of tire (wheel 3) [m]
よって上記式(1)より駆動力Pを算出し、車体質量m〔Kg〕を考慮すれば、次式(2)により、エンジン起因前後加速度aeg〔m/s2〕を求めることができる。 Therefore, if the driving force P is calculated from the above equation (1) and the vehicle body mass m [Kg] is taken into consideration, the engine-induced longitudinal acceleration a eg [m / s 2 ] can be obtained from the following equation (2).
aeg=P/m〔m/s2〕 (2) a eg = P / m [m / s 2 ] (2)
エンジン起因前後加速度aegが上記式(2)により求められることを利用して、エンジン起因前後加速度推定部25は、図4に示すようにして、エンジン起因前後加速度aegを算出する。
すなわち、エンジン起因前後加速度推定部25は、まず、AT減速比算出手段34がCANからのギア位置信号Pgに応じて、減速比をエンジントルク信号Teに乗算し、これらの積を最終減速比積算部35に出力する。
最終減速比乗算部35は、エンジン起因前後加速度推定部25の出力データに最終減速比ifを乗算し、タイヤ半径割算部36に出力する。
タイヤ半径割算部36は、最終減速比積算部35の出力データをタイヤ半径Rt〔m〕で割って(換言すれば、1/Rtを乗算して)、駆動力(駆動力〔N〕=トルク〔Nm〕/タイヤ半径〔m〕)を算出し、これを動力伝達効率乗算部37に出力する。
動力伝達効率乗算部37は、駆動力に動力伝達効率ntを乗じ、これを車体質量割算部38に出力する。
車体質量割算部38は、タイヤ半径割算部36の出力データを車体質量m〔Kg〕で割る(換言すれば、1/mを乗算する)ことにより、エンジン起因前後加速度aegを求める。
Using the fact that the engine-derived longitudinal acceleration a eg is obtained by the above equation (2), the engine-derived longitudinal
That is, the engine due longitudinal
The final reduction
The tire
The power transmission
The vehicle body
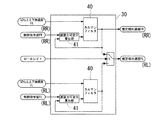
前記液圧起因前後加速度推定部26は、図5に示すように、加速度/液圧変換ゲイン乗算部40と、MAX制限部41と、を備えている。
そして、液圧起因前後加速度推定部26は、ディスクブレーキを備えた車両2のブレーキ力Bが一般的に次式(3)で表され、さらに、マスタシリンダ液圧Pmが検出可能であるとすると、式(4)により、計算を省略化できることを利用し、ブレーキ起因前後加速度abkを算出する。
このブレーキ起因前後加速度abkの算出方法を以下に説明する。
すなわち、ディスクブレーキを備えた車両2のブレーキ力Bは一般的に次式(3)で表される。
The hydraulic pressure-induced longitudinal
Then, the hydraulic pressure-induced longitudinal
A method for calculating the brake-induced longitudinal acceleration a bk will be described below.
That is, the braking force B of the
B=(2μ×Aw×F×K×r)/(Rt×Am) (3)
B:ブレーキ力〔N〕
μ:ディスクロータとパッドの摩擦係数
Aw:ホイールシリンダの断面積〔m2〕
F:踏力〔N〕
K:ブレーキペダル比
r:ディスクロータの有効半径〔m〕
Rt:タイヤの有効半径〔m〕
Am:マスタシリンダ断面積〔m2〕
B = (2 μ × A w × F × K × r) / (R t × A m ) (3)
B: Brake force [N]
μ: Coefficient of friction between disk rotor and pad A w : Cross-sectional area of wheel cylinder [m 2 ]
F: pedaling force [N]
K: Brake pedal ratio r: Effective radius of disk rotor [m]
R t : Effective radius of tire [m]
A m : Master cylinder cross-sectional area [m 2 ]
上記式(3)により、ブレーキ力が算出可能であるが、ここでマスタシリンダ液圧Pmが検出可能であるとすると、以下の式(4)により、計算を省略化できる。
B=Pm×C (4)
B:ブレーキ力〔N〕
Pm:マスタシリンダ液圧Pm〔Pa〕
C :定数〔N/Pa〕
Although the braking force can be calculated by the above equation (3), if the master cylinder hydraulic pressure P m can be detected here, the calculation can be omitted by the following equation (4).
B = P m × C (4)
B: Brake force [N]
P m : Master cylinder hydraulic pressure P m [Pa]
C: Constant [N / Pa]
よって上記式(4)よりブレーキ力を算出し、車体質量を考慮すれば、ブレーキ力影響における前後加速度abk〔m/s2〕は次式(5)により求めることができる。
abk=B/m〔m/s2〕 (5)
Therefore, when the braking force is calculated from the above equation (4) and the vehicle body mass is taken into consideration, the longitudinal acceleration a bk [m / s 2 ] in the influence of the braking force can be obtained by the following equation (5).
a bk = B / m [m / s 2 ] (5)
ブレーキ力影響における前後加速度abkが上記式(5)に示すように求められることを利用して、液圧起因前後加速度推定部26は、図5に示すようにして、ブレーキ力影響における前後加速度abkを算出する。
すなわち、液圧起因前後加速度推定部26は、図5に示すようにして、まず、加速度/液圧変換ゲイン乗算部40がCANからのマスタシリンダブレーキ液圧信号Pmに加速度/液圧変換ゲインを乗算し、この乗算により得られたデータをMAX制限部41に出力する。MAX制限部41は、車輪ロックのような場合では実加速度<推定加速度となることを考慮し、現実的に発生しうる1.2Gを最大値とした上限値を設定している。そして、MAX制限部41は、加速度/液圧変換ゲイン乗算部40の出力データについて、上記上限値で制限するようにして、ブレーキ起因前後加速度abkを求める。
Using the fact that the longitudinal acceleration a bk in the influence of the braking force is obtained as shown in the above formula (5), the hydraulic pressure-induced longitudinal
That is, as shown in FIG. 5, the hydraulic pressure-induced longitudinal
前記空気抵抗起因前後加速度推定部27は、図6に示すように、乗算回路43と、ゲイン乗算部44、空気密度乗算部45、正面投影面積乗算部46、空気抗力係数乗算部47、質量除算部48を備えている。
そして、空気抵抗起因前後加速度推定部27は、空気力および同モーメントは、車体6の正面投影面積と速度の2乗に比例し、車体6の形状の違いによって大きさが異なり、空気抵抗による抗力は式(6)により表され、さらに、車体質量を考慮すれば、空気抵抗による抗力影響における前後加速度aarを次式(7)により求めることができることを利用して、空気抵抗起因前後加速度aarを算出する。
この空気抵抗起因前後加速度aarの算出方法を以下に説明する。
すなわち、空気抵抗による抗力は次式(6)で表される。
As shown in FIG. 6, the air resistance-induced longitudinal
The air resistance-induced
A method for calculating the air resistance-induced longitudinal acceleration a ar will be described below.
That is, the drag due to air resistance is expressed by the following equation (6).
Fx=Cx・(1/2)・dAν2 S (6)
Fx:空気抵抗による抗力〔N〕
S:正面投影面積〔m2〕
ν:車速ν(大気相対速度) 〔m/s〕
dA:空気密度〔Kg/m3〕
Cx:抗力係数(空気抵抗係数)
F x = C x · (1/2) · d A ν 2 S (6)
Fx: Drag due to air resistance [N]
S: Projection area [m 2 ]
ν: Vehicle speed ν (atmospheric relative speed) [m / s]
d A : Air density [Kg / m 3 ]
C x : drag coefficient (air resistance coefficient)
よって上記より空気抵抗による抗力Fx〔N〕を算出し、車体質量m〔Kg〕を考慮すれば、空気抵抗による抗力影響における前後加速度(空気抵抗起因前後加速度aar〔m/s2〕)を次式(7)により求めることができる。
aar=Fx /m〔m/s2〕 (7)
Therefore, if the drag Fx [N] due to air resistance is calculated from the above and the vehicle body mass m [Kg] is taken into account, the longitudinal acceleration due to the drag effect due to the air resistance (air resistance-induced longitudinal acceleration a ar [m / s 2 ]) It can obtain | require by following Formula (7).
a ar = Fx / m [m / s 2 ] (7)
空気抵抗起因前後加速度aarが上記式(7)に示すように求められることを利用して、空気抵抗起因前後加速度推定部27は、図6に示すようにして、まず、乗算回路43がCANからの車速信号νのデータvを2乗して、この2乗処理により得たデータをゲイン乗算部44に出力する。ゲイン乗算部44は、乗算回路43の出力データにゲイン(1/2)を乗算して、この乗算により得たデータを空気密度乗算部45に出力する。空気密度乗算部45は、ゲイン乗算部44の出力データに空気密度dAを乗算し、この乗算により得たデータを正面投影面積乗算部46に出力する。正面投影面積乗算部46は、空気密度乗算部45の出力データに正面投影面積Sを乗算し、この乗算により得たデータを空気抗力係数乗算部47に出力する。空気抗力係数乗算部47は、正面投影面積乗算部46の出力データに抗力係数Cxを乗算し、この乗算により得たデータを質量除算部48に出力する。データを質量除算部48は、空気抗力係数乗算部47の出力データを質量mで除算することにより、空気抵抗起因前後加速度aarを算出する。
By utilizing the fact that the air resistance-induced longitudinal acceleration a ar is obtained as shown in the above equation (7), the air resistance-induced longitudinal
上記実施形態では、ピッチレート推定手段21を用いてピッチレートを算出し、この算出されたピッチレートを用いて、車両2の振動を抑制する。そして、ピッチレート推定手段21が、加減速を考慮して、制御指令値を生成するためのピッチレートを推定することから、上述したように精度よくピッチレートを推定することができ、これに伴い、当該サスペンション制御装置1では車両2の振動抑制を精度よく制御することができる。
さらに、ピッチレート推定手段21のピッチレート推定には、従動輪(前左右輪3FL,3FR)の車輪速を用いて行うため、駆動輪の車輪速を用いる場合と比べ、ピッチ運動に伴う車輪速の変化をより顕著に把握することができて、算出精度が向上する。これにより、サスペンション制御装置1では、振動抑制の制御精度の向上を図ることができる。
さらに、演算手段32は、車輪速時間変化率から推定前後加速度aesを減算する処理を行うことにより、エンジンやブレーキによる車体6の加減速の影響をキャンセルする。これにより、エンジンやブレーキによる車体6の加減速影響に関わらず、常に車両2のピッチ運動を推定することができ、良好な振動抑制制御を行なうことができる。
また、減算処理の対象を加速度としているが、別の次元の運動、例えば車輪速と車体の前後速度を対象とすることができる。
In the above embodiment, the pitch rate estimation means 21 is used to calculate the pitch rate, and the vibration of the
Furthermore, since the pitch rate estimation by the pitch rate estimation means 21 is performed using the wheel speeds of the driven wheels (front left and right wheels 3FL, 3FR), the wheel speed associated with the pitch motion is compared with the case where the wheel speed of the driving wheel is used. Can be recognized more remarkably, and calculation accuracy is improved. Thereby, the
Furthermore, the calculating means 32 cancels the influence of the acceleration / deceleration of the vehicle body 6 by the engine or the brake by performing a process of subtracting the estimated longitudinal acceleration a es from the wheel speed time change rate. As a result, regardless of the acceleration / deceleration effect of the vehicle body 6 caused by the engine or the brake, the pitch motion of the
Further, although the target of the subtraction processing is acceleration, it is possible to target another dimension of motion, for example, wheel speed and vehicle body longitudinal speed.
上記実施形態では、サスペンション制御装置1をトランスミッションがATとされた車両2に用い、これに対応してAT減速比算出手段34が減速比を算出する場合を例にしたが、これに限らず、トランスミッションがMT(マニュアル・トランスミッション)とされた車両2に用い、AT減速比算出手段34に代えて、MTに対応した減速比算出手段を設けるようにしてもよい。また、トランスミッションがCVT(無段変速機、Continuously Variable Transmission)とされた車両2に用い、AT減速比算出手段34に代えて、CVTに対応した減速比算出手段を設けるようにしてもよい。
また、トルクコンバータなどの効率(滑り)を考慮して、減速比を算出するようにしても良い。この場合、減速比の算出精度を向上することができる。
また、ハイブリッド車や電気自動車の場合には、エンジントルクではなく、それぞれエンジンとモータトルクとの和やモータトルクを用いることで同様に前後加速度が推定できる。
In the above embodiment, the
Further, the reduction ratio may be calculated in consideration of the efficiency (slip) of the torque converter or the like. In this case, the calculation accuracy of the reduction ratio can be improved.
In the case of a hybrid vehicle or an electric vehicle, the longitudinal acceleration can be similarly estimated by using the sum of the engine and motor torque or the motor torque instead of the engine torque.
上記実施の形態において、左側、右側車輪3の車輪速の時間変化率が逆位相のときは、走行路が悪路であると判定して前記車輪速時間変化率算出手段31の算出処理を中止するように構成してもよい。この構成によれば、不要な制御を抑制できる。
In the above embodiment, when the time change rate of the wheel speed of the left and
上記実施形態において、前後加速度推定手段20が推定前後加速度aesを推定するのに際し、トルクコンバータのすべりとロックアップに係る情報を用いるようにしてもよい。この構成によれば、推定精度がより向上できる。
上記実施形態では、CANを経由して入手される車速ν、エンジントルクTe、ギア位置Pg、マスタシリンダ液圧Pmの各情報を用いて、前後加速度推定手段20(前後加速度算出手段)が前後加速度を算出するようにしているが、上記各情報に代えて、GPSによる位置変化に基づいて前後運動を算出するようにしてもよい。例えば、走行中、所定の時間間隔をおいて車両の位置を測定すれば、平均速度が算出できる。これを車輪速から減算することで車輪速の変動分、すなわちピッチレートが算出できることとなる。
In the above embodiment, when the longitudinal acceleration estimating means 20 estimates the estimated longitudinal acceleration a es , information related to slip and lockup of the torque converter may be used. According to this configuration, the estimation accuracy can be further improved.
In the above embodiment, the longitudinal acceleration estimating means 20 (longitudinal acceleration calculating means) is obtained by using the vehicle speed ν, engine torque Te , gear position P g , and master cylinder hydraulic pressure P m information obtained via CAN. However, instead of the above information, the longitudinal motion may be calculated based on a positional change by GPS. For example, the average speed can be calculated by measuring the position of the vehicle at a predetermined time interval during traveling. By subtracting this from the wheel speed, the fluctuation of the wheel speed, that is, the pitch rate can be calculated.
上記実施形態では、CANを経由して得られる車速ν、エンジントルクTe、ギア位置Pg、及びブレーキマスタシリンダ液圧Pmに基づいて車体6の前後加速度を推定する前後加速度推定手段20を設けた場合を例にしたが、この前後加速度推定手段20に代えて、半導体加速度センサ、歪ゲージ式加速度センサ、圧電式加速度センサのように、車体6に作用する前後加速度を直接的に検出する加速度センサを用いるようにしてもよい。この構成によれば、前後加速度を直接測定するのでピッチレートの推定精度をより向上できる。 In the above embodiment, the longitudinal acceleration estimating means 20 that estimates the longitudinal acceleration of the vehicle body 6 based on the vehicle speed ν obtained via the CAN, the engine torque Te , the gear position P g , and the brake master cylinder hydraulic pressure P m is provided. Although the case where it is provided is taken as an example, the longitudinal acceleration acting on the vehicle body 6 is directly detected, such as a semiconductor acceleration sensor, a strain gauge acceleration sensor, or a piezoelectric acceleration sensor, instead of the longitudinal acceleration estimating means 20. An acceleration sensor may be used. According to this configuration, since the longitudinal acceleration is directly measured, the pitch rate estimation accuracy can be further improved.
上記実施形態において、前記前後加速度推定手段20が行う前後加速度の算出処理において、当該算出処理を、車両2に作用する風圧、車体6の傾斜、走行路の勾配などによる外力の影響を考慮して行うように構成してもよい。このように構成することにより、走行状態を反映した状態で前後加速度の算出を行え、ひいては実使用状態により近い形態で車両2の振動抑制を行なうことができ、振動抑制制御の精度を向上することができる。
In the above embodiment, in the longitudinal acceleration calculation process performed by the longitudinal acceleration estimation means 20, the calculation process is performed in consideration of the influence of external force due to the wind pressure acting on the
<第3実施形態>
上記実施形態の制御装置8に代えて、図7に示すように、上記実施形態のピッチレート推定手段21を備えると共に、車体6の上下加速度を推定する上下加速度推定手段(第1の上下運動算出手段)51と、車体6のロールレートを算出(推定)するロールレート算出手段(ロール運動推定手段)52と、上下加速度とロールレートとピッチレートから車体6の各部位の上下動を演算する上下動演算手段53と、演算された上下動から所定の指令をショックアブソーバ4に送るコントローラ54と、を備えて、制御装置8Aを構成してもよい。
<Third Embodiment>
As shown in FIG. 7, instead of the
この第3実施形態によれば、ピッチレート算出手段21が、第2実施形態で述べたようにピッチレートを精度よく算出し、さらに、上下動演算手段53が、ピッチレート算出手段21が得たピッチレートと、上下加速度推定手段51からの上下加速度と、ロールレート算出手段52からのロールレートとから、車体6の各部位の上下動を演算して上下動信号を得、この上下動信号をコントローラ54に出力し、コントローラ54が前記上下動信号に応じた制御指令値を生成し、これをショックアブソーバ4に入力して減衰力、ひいては振動抑制の制御を行なう。
According to the third embodiment, the pitch rate calculating means 21 calculates the pitch rate with high accuracy as described in the second embodiment, and the vertical motion calculating means 53 is obtained by the pitch
上述したように、振動抑制制御に用いる指令生成に用いられるピッチレートが精度よく算出されることから、車両2の振動抑制の制御精度を向上できる。さらに、指令生成に用いられるピッチレートに対して、上下加速度と、ロールレートとを含めて前記制御指令値を算出するので、前記制御指令値の算出が、車両2に作用する上下加速度及びロールレートの影響が考慮されて行われる分、算出精度が向上し、ひいては車両2の振動抑制の制御精度をより向上できることになる。
As described above, since the pitch rate used for command generation used for vibration suppression control is calculated with high accuracy, the control accuracy of vibration suppression of the
<第4実施形態>
上記第2実施形態で用いた上下加速度推定手段51と、車体6のロールレートを算出(推定)するロールレート算出手段52と、に代えて、図8に示すように、車体6の第1点の上下加速度を算出する第1の上下加速度算出手段61と、車体6の第2点の上下加速度を算出する第2の上下加速度算出手段62と、を設け、上下加速度とロールレートとピッチレートから車体6の各部位の上下動を演算する上下動演算手段53に代えて、第1、第2点の上下加速度とピッチレートから車体6の各部位の上下動を演算する上下動演算手段53Aを設けて、制御装置8Bを構成してもよい。
<Fourth embodiment>
Instead of the vertical acceleration estimating means 51 and the roll rate calculating means 52 for calculating (estimating) the roll rate of the vehicle body 6 used in the second embodiment, as shown in FIG. The first vertical acceleration calculating means 61 for calculating the vertical acceleration of the vehicle body and the second vertical acceleration calculating means 62 for calculating the vertical acceleration of the second point of the vehicle body 6 are provided. Instead of the vertical motion calculating means 53 for calculating the vertical motion of each part of the vehicle body 6, a vertical motion calculating means 53A for calculating the vertical motion of each part of the vehicle body 6 from the vertical acceleration and pitch rate of the first and second points. It may be provided to constitute the
この第4実施形態によれば、ピッチレート算出手段21が、上述したようにピッチレートを精度よく算出し、さらに、上下動演算手段53Aが、第1の上下加速度算出手段61が得た車体6の第1点の上下加速度と、第2の上下加速度算出手段62が得た車体6の第2点の上下加速度とから、車体6の各部位の上下動を演算して上下動信号を得、この上下動信号をコントローラ54に出力し、コントローラ54が前記上下動信号に応じた制御指令値を生成し、これをショックアブソーバ4に入力して減衰力、ひいては振動抑制の制御を行なう。
According to the fourth embodiment, the pitch rate calculating means 21 calculates the pitch rate with high accuracy as described above, and the vertical motion calculating means 53A is obtained by the vehicle body 6 obtained by the first vertical acceleration calculating means 61. The vertical motion of each part of the vehicle body 6 is calculated from the vertical acceleration of the first point of the vehicle and the vertical acceleration of the second point of the vehicle body 6 obtained by the second vertical acceleration calculation means 62 to obtain a vertical motion signal, The vertical movement signal is output to the
上述したように、振動抑制制御に用いる指令生成に用いられるピッチレートが精度よく算出されることから、車両2の振動抑制の制御精度を向上できる。さらに、指令生成に用いられるピッチレートに対して第1および第2点の上下加速度を含めて前記制御指令値を算出するので、前記制御指令値の算出が、車両2に作用する第1および第2点の上下加速度の影響が考慮されて行われる分、算出精度が向上し、ひいては車両2の振動抑制の制御精度をより向上できることになる。
As described above, since the pitch rate used for command generation used for vibration suppression control is calculated with high accuracy, the control accuracy of vibration suppression of the
以下、本発明の第4実施形態を図9〜図18に基づいてより詳細に説明する。
図9は、第4実施形態に係るサスペンション制御装置が採用された自動車101を模式的に示す図である。図9において、自動車101の各車輪102(右前輪102FR、右後輪102RRのみ図示している。)に対応して、減衰力可変式ショックアブソーバ(以下、ショックアブソーバという。)103が設けられている。ショックアブソーバ103については、適宜、各車輪に対応して、便宜的に、右前輪、右後輪、左前輪、左後輪のショックアブソーバ103FR、103RR、103FL、103RLともいう。なお、ばね上速度及びばね上相対速度などの信号や各種部材についても、以下、適宜、各車輪102に対応してショックアブソーバ103の場合と同様の記載をする。
ショックアブソーバ103の外周にはスプリング104が取付けられている。これらショックアブソーバ103及びスプリング104は、車体105と各車輪102の間に介在され、各車輪102の上下動を減衰させる働きを持つ。車体105には、右前輪102FRに対応して車体105に作用する上下方向の加速度(ばね上上下運動)を検出するばね上加速度センサ107(ばね上運動検出手段)が取付けられている。また、車体105には、車体105に作用する前後方向の加速度を検出する前後加速度センサ108が取付けられている。さらに、車体105の左後輪102RL(図示しない)に対応した部分(以下、車体左後輪部という。)には、自動車101の車高レベルを検出する車高センサ110が取付けられている。また、自動車101には、左右前輪102FL、102FR(右前輪102FRのみ図示している。)の回転速度を検出する車輪速センサ111(以下、左右前輪102FL、102FRに対応して車輪速センサ111FR、111FLともいう。)が設けられている。
なお、車高センサ110は、後述のばね上速度推定回路115と組み合わされ本発明のばね上運動検出手段を構成する。
Hereinafter, the fourth embodiment of the present invention will be described in more detail with reference to FIGS.
FIG. 9 is a diagram schematically illustrating an automobile 101 in which the suspension control device according to the fourth embodiment is employed. In FIG. 9, a damping force variable shock absorber (hereinafter referred to as a shock absorber) 103 is provided corresponding to each wheel 102 (only the right front wheel 102FR and the right rear wheel 102RR are shown) of the automobile 101. Yes. The shock absorber 103 is also referred to as a shock absorber 103FR, 103RR, 103FL, 103RL for the right front wheel, the right rear wheel, the left front wheel, and the left rear wheel for convenience, corresponding to each wheel. Signals such as the sprung speed and the sprung relative speed and various members will be described below as appropriate for the shock absorber 103 corresponding to each wheel 102 as appropriate.
A spring 104 is attached to the outer periphery of the shock absorber 103. The shock absorber 103 and the spring 104 are interposed between the vehicle body 105 and each wheel 102 and have a function of damping the vertical movement of each wheel 102. A sprung acceleration sensor 107 (sprung motion detection means) that detects vertical acceleration (sprung vertical motion) acting on the vehicle body 105 corresponding to the right front wheel 102FR is attached to the vehicle body 105. A longitudinal acceleration sensor 108 that detects longitudinal acceleration acting on the vehicle body 105 is attached to the vehicle body 105. Further, a vehicle height sensor 110 that detects the vehicle height level of the automobile 101 is attached to a portion corresponding to the left rear wheel 102RL (not shown) of the vehicle body 105 (hereinafter referred to as a vehicle body left rear wheel portion). Further, the automobile 101 includes a wheel speed sensor 111 that detects the rotational speed of the left and right front wheels 102FL and 102FR (only the right front wheel 102FR is shown) (hereinafter, the wheel speed sensor 111FR corresponding to the left and right front wheels 102FL and 102FR, 111FL) is also provided.
The vehicle height sensor 110 is combined with a sprung speed estimation circuit 115, which will be described later, and constitutes a sprung motion detection means of the present invention.
ばね上加速度センサ107、前後加速度センサ108、車高センサ110及び車輪速センサ111には、コントローラ(制御手段)112が接続されている。コントローラ112は、各接続部材からの情報の入力を受けて、後述する演算処理に基づいて、車体105のピッチ運動、ワープ運動、ロール運動、バウンス運動、各車輪位置での上下速度(以下、本発明のばね上運動に該当し、ばね上速度vといい、適宜、車体右前輪部、車体右後輪部、車体左前輪部、車体左後輪部のばね上速度vFR、vRR、vFL、vRLということもある。)、及び各車輪102と車体105との相対速度vs〔以下、車輪(右前輪、右後輪、左前輪、左後輪)の相対速度vsFR、vsRR、vsFL、vsRLと便宜的にいうこともある。〕を算出し、これらの演算結果に基づいて、スカイフック制御理論に基づく制御指令値(減衰力指令値)を算出し、ショックアブソーバ103を制御する。 A controller (control means) 112 is connected to the sprung acceleration sensor 107, the longitudinal acceleration sensor 108, the vehicle height sensor 110, and the wheel speed sensor 111. The controller 112 receives input of information from each connection member, and based on the arithmetic processing described later, the pitch motion, warp motion, roll motion, bounce motion of the vehicle body 105, and the vertical speed at each wheel position (hereinafter referred to as this speed). Corresponds to the sprung motion of the invention and is called the sprung speed v. The sprung speeds vFR, vRR, vFL, vRL of the right front wheel part, right rear wheel part, left front wheel part, left rear wheel part of the vehicle body And relative speeds vs. each wheel 102 and the vehicle body 105 (hereinafter referred to as relative speeds vsFR, vsRR, vsFL, vsRL of the wheels (right front wheel, right rear wheel, left front wheel, left rear wheel)) Sometimes it is true. ], A control command value (damping force command value) based on the skyhook control theory is calculated based on these calculation results, and the shock absorber 103 is controlled.
コントローラ112は、図10に示すように、積分回路114、オブザーバで構成されるばね上速度推定回路115、ワープ算出部116、ピッチ推定部117、ロール算出部118、バウンス推定部119、オブザーバで構成される前輪相対速度推定部120、微分回路121、オブザーバで構成される後輪相対速度推定部122、及びスカイフック制御部123を備えている。
積分回路114は、ばね上加速度センサ107が検出する車体右前輪部の加速度(ばね上加速度)αFRを積分して車体右前輪部の上下絶対速度(ばね上速度)vFRを算出し、算出データをバウンス推定部119及びワープ算出部116に入力する。なお、ばね上加速度センサ107が検出した車体右前輪部の加速度(ばね上加速度)αFRは前輪相対速度推定部120に入力される。
As shown in FIG. 10, the controller 112 includes an integration circuit 114, a sprung speed estimation circuit 115 including an observer, a warp calculation unit 116, a pitch estimation unit 117, a roll calculation unit 118, a bounce estimation unit 119, and an observer. A front wheel relative speed estimation unit 120, a differentiation circuit 121, a rear wheel relative speed estimation unit 122 composed of an observer, and a skyhook control unit 123.
The integration circuit 114 integrates the acceleration (sprung acceleration) αFR of the right front wheel portion of the vehicle body detected by the sprung acceleration sensor 107 to calculate the absolute vertical speed (sprung velocity) vFR of the right front wheel portion of the vehicle body. The data is input to the bounce estimation unit 119 and the warp calculation unit 116. Note that the acceleration (sprung acceleration) αFR of the vehicle body right front wheel detected by the sprung acceleration sensor 107 is input to the front wheel relative speed estimation unit 120.
ばね上速度推定回路115は、車高センサ110が検出した車体左後輪部の車高の入力を受け、予め定めたモデルを用いてシミュレーションを行って、車体左後輪部の上下絶対速度(ばね上速度)vRLを推定し、推定データをワープ算出部116及びバウンス推定部119に入力する。なお、車高センサ110には前記微分回路121が接続されており、車高センサ110の検出データを微分して、左後輪の相対速度vsRLを算出し、算出データを後輪相対速度推定部122に入力する。 The sprung speed estimation circuit 115 receives the vehicle height of the left rear wheel portion detected by the vehicle height sensor 110, performs a simulation using a predetermined model, and calculates the absolute vertical speed ( The sprung speed) vRL is estimated, and the estimated data is input to the warp calculating unit 116 and the bounce estimating unit 119. The differentiation circuit 121 is connected to the vehicle height sensor 110, the detection data of the vehicle height sensor 110 is differentiated to calculate the relative speed vsRL of the left rear wheel, and the calculated data is used as the rear wheel relative speed estimation unit. Input to 122.
ワープ算出部116は、積分回路114からの車体右前輪部のばね上速度vFR及びばね上速度推定回路115からの車体左後輪部のばね上速度vRLの差をとってワープwpを算出し、算出データ(ワープwp)をロール算出部118に入力する。
ピッチ推定部117は、車輪速センサ111FR、111FLが検出する左右前輪102FL、102FRの車輪速及び前後加速度センサ108が検出する前後加速度を用いてピッチレートptを推定し、推定データ(ピッチレイトpt)をロール算出部118及びスカイフック制御部123に入力する。
ロール算出部118は、ワープ算出部116及びピッチ推定部117の演算結果からこれらの差をとってロールレートrolを算出し、算出データ(ロールレイトrol)をバウンス推定部119、前輪相対速度推定部120、後輪相対速度推定部122、及びスカイフック制御部123に入力する。
バウンス推定部119は、積分回路114が得た車体右前輪部のばね上速度vFR、ばね上速度推定回路115が得た車体左後輪部のばね上速度vRL、ロール算出部118が得たロールレートrolから、各車輪位置でのばね上速度(vFR,vRL,vFL,vRR)を求め、求めたデータを前輪相対速度推定部120、後輪相対速度推定部122、及びスカイフック制御部123に入力する。
The warp calculation unit 116 calculates the warp wp by taking the difference between the sprung speed vFR of the right front wheel of the vehicle body from the integration circuit 114 and the sprung speed vRL of the left rear wheel of the vehicle body from the sprung speed estimation circuit 115, Calculation data (warp wp) is input to the roll calculation unit 118.
The pitch estimation unit 117 estimates the pitch rate pt using the wheel speeds of the left and right front wheels 102FL and 102FR detected by the wheel speed sensors 111FR and 111FL and the longitudinal acceleration detected by the longitudinal acceleration sensor 108, and estimates data (pitch rate pt). Is input to the roll calculator 118 and the skyhook controller 123.
The roll calculation unit 118 calculates the roll rate rol by taking these differences from the calculation results of the warp calculation unit 116 and the pitch estimation unit 117, and calculates the calculated data (roll rate rol) as the bounce estimation unit 119 and the front wheel relative speed estimation unit. 120, the rear wheel relative speed estimation unit 122, and the skyhook control unit 123.
The bounce estimation unit 119 includes the sprung speed vFR of the right front wheel of the vehicle body obtained by the integration circuit 114, the sprung speed vRL of the left rear wheel of the vehicle obtained by the sprung speed estimation circuit 115, and the roll obtained by the roll calculation unit 118. From the rate rol, the sprung speed (vFR, vRL, vFL, vRR) at each wheel position is obtained, and the obtained data is sent to the front wheel relative speed estimation unit 120, the rear wheel relative speed estimation unit 122, and the skyhook control unit 123. input.
前輪相対速度推定部120は、ばね上加速度センサ107が検出する車体右前輪部のばね上加速度αFR、バウンス推定部119が得た各車輪位置でのばね上速度(vFR,vRL,vFL,vRR)、前記入力データ(車体右前輪部の加速度、ロール算出部118が算出したロールレートrol、及びスカイフック制御部123が出力する減衰力指令値の入力を受け、予め定めたモデルを用いてシミュレーションを行うことによって、車体右前輪部のばね上加速度αFRを用いて左右前輪102FL、102FRの夫々と車体105との相対速度(車体左右前輪102FL、102FRの相対速度)vsFL、vsFRを推定し、推定データをスカイフック制御部123に入力する。
後輪相対速度推定部122は、微分回路121が算出した左後輪の相対速度vsRL、ロール算出部118が算出したロールレートrol、バウンス推定部119が得た各車輪位置でのばね上速度(vFR,vRL,vFL,vRR)、及びスカイフック制御部123が出力する減衰力指令値の入力を受け、予め定めたモデルを用いてシミュレーションを行うことによって、微分回路121からの左後輪の相対速度vsRLを用いて左右後輪102RL、102RRの夫々と車体105との相対速度(車体左右後輪102RL、102RRの相対速度)vsRL、vsRRを推定し、推定データをスカイフック制御部123に入力する。
The front wheel relative speed estimation unit 120 detects the sprung acceleration αFR of the right front wheel of the vehicle body detected by the sprung acceleration sensor 107, and the sprung speeds (vFR, vRL, vFL, vRR) at the respective wheel positions obtained by the bounce estimation unit 119. The input data (the acceleration of the right front wheel of the vehicle body, the roll rate rol calculated by the roll calculation unit 118, and the damping force command value output by the skyhook control unit 123 are input, and a simulation is performed using a predetermined model. To estimate the relative speed between the left and right front wheels 102FL, 102FR and the vehicle body 105 (relative speed of the left and right front wheels 102FL, 102FR) vsFL, vsFR, using the sprung acceleration αFR of the right front wheel of the vehicle body, and the estimated data Is input to the skyhook control unit 123.
The rear wheel relative speed estimation unit 122 calculates the relative speed vsRL of the left rear wheel calculated by the differentiation circuit 121, the roll rate rol calculated by the roll calculation unit 118, and the sprung speed at each wheel position obtained by the bounce estimation unit 119 ( vFR, vRL, vFL, vRR) and a damping force command value output from the skyhook control unit 123, and by performing a simulation using a predetermined model, the relative of the left rear wheel from the differentiation circuit 121 is obtained. Using the speed vsRL, the relative speed between the left and right rear wheels 102RL and 102RR and the vehicle body 105 (the relative speed of the left and right rear wheels 102RL and 102RR) vsRL and vsRR is estimated, and the estimated data is input to the skyhook control unit 123. .
スカイフック制御部123は、予め定められるスカイフック制御理論に基づいて各輪位置でのばね上速度及び各車輪102と車体105との相対速度を用いて各車輪102に対応したショックアブソーバ103に対する減衰力指令値を発生してショックアブソーバ103を制御する。なお、減衰力指令値は、前輪相対速度推定部120及び後輪相対速度推定部122にフィードバックされ、シミュレーションに用いられる。 The skyhook control unit 123 uses the sprung speed at each wheel position and the relative speed between each wheel 102 and the vehicle body 105 based on a predetermined skyhook control theory to attenuate the shock absorber 103 corresponding to each wheel 102. A force command value is generated to control the shock absorber 103. The damping force command value is fed back to the front wheel relative speed estimation unit 120 and the rear wheel relative speed estimation unit 122 and used for simulation.
次に、コントローラ112の上記構成要素についてさらに説明する。
ばね上速度推定回路115は、図11に示すように、減衰力可変分算出部130及び現代制御理論を適用したカルマンフィルタ131(オブザーバ)を含んで構成され、上述したように車高センサ110が検出した車体左後輪部の車高の入力を受け、予め定めたモデルを用いてシミュレーションを行って、車体左後輪部の上下絶対速度(ばね上の絶対速度)を推定する。減衰力可変分算出部130は、右後輪のショックアブソーバ103RRへの制御指令値及びカルマンフィルタ131の算出データ(左後輪部の相対速度vsRL)の入力を受けて減衰力可変分を算出し、カルマンフィルタ131に入力する。ここで,相対速度としてカルマンフィルタの算出値を用いたが,車高センサ検出値を微分して求めてもよい。
また、カルマンフィルタ131は、以下のように設計されている。
すなわち、まず、図12に示すように、車体105の上下運動をモデル化する。図12には、その一例として、車体105の上下振動を1自由度でモデル化した1/4車体モデルを示す。図12のモデルにおいて、車体105の絶対上下変位をZb、ばね下の絶対上下変位をZ0、ばね定数をk、減衰係数をc、車体105に働く外力をf、車体105の質量をmとしている。
Next, the above components of the controller 112 will be further described.
As shown in FIG. 11, the sprung speed estimation circuit 115 includes a variable damping force calculation unit 130 and a Kalman filter 131 (observer) to which modern control theory is applied, and is detected by the vehicle height sensor 110 as described above. The vehicle height is input to the left rear wheel portion of the vehicle body, and a simulation is performed using a predetermined model to estimate the absolute vertical speed (absolute speed on the spring) of the left rear wheel portion of the vehicle body. The damping force variable amount calculation unit 130 receives the control command value to the right rear wheel shock absorber 103RR and the calculation data of the Kalman filter 131 (relative speed vsRL of the left rear wheel portion), calculates the damping force variable amount, Input to the Kalman filter 131. Here, the calculated value of the Kalman filter is used as the relative speed, but the vehicle height sensor detection value may be differentiated.
The Kalman filter 131 is designed as follows.
That is, first, as shown in FIG. 12, the vertical movement of the vehicle body 105 is modeled. FIG. 12 shows, as an example, a ¼ vehicle body model in which the vertical vibration of the vehicle body 105 is modeled with one degree of freedom. 12, the absolute vertical displacement of the vehicle body 105 is Z b , the unsprung absolute vertical displacement is Z 0 , the spring constant is k, the damping coefficient is c, the external force acting on the vehicle body 105 is f, and the mass of the vehicle body 105 is m. It is said.
これにより、この系の運動方程式は式(1)に示されるようになる。

z20=zb-z0 …(2)
As a result, the equation of motion of this system is as shown in Equation (1).
z 20 = z b -z 0 (2)
ここで、状態変数は、
また、式(5)であるとしている。
よって、相対変位が測定可能であると考えると、式(3)よりオブザーバは、式(6)に示すように構成される。
ここで、Lは、オブザーバゲインである。このオブザーバゲインLは、カルマンによって解かれ、式(7)で示されるRiccati方程式
AP+PAT-PCTR-1CP+Q=0…(7)の正定対称な解Pより、式(8)に示されるように決定される。
L=PCTR-1 … (8)
Here, L is an observer gain. This observer gain L is solved by Kalman, and is shown in Expression (8) from a positive definite solution P of the Riccati equation AP + PA T −PC TR −1 CP + Q = 0 (7) shown in Expression (7). To be determined.
L = PC T R −1 (8)
また、本第4実施形態のようにショックアブソーバを用いた系に適用する場合、式(5)の減衰定数cが可変となるため、この点を考慮する必要がある。
この第3実施形態では、推定した相対変位を微分して得た相対速度とコントローラ112の制御指令値から、減衰力可変分算出部130を用いて実際にショックアブソーバ103が発生している減衰力を推定し、その推定値を車体105に働く外力をfとしてオブザーバに入力する外乱オブザーバを構成して、この減衰力可変による相対速度の変動を打ち消す構造としている。
なお、この第4実施形態では、ばね上速度推定回路115をカルマンフィルタで構成した場合を例にしたが、他のタイプのオブザーバを用いてもよい。
Further, when applied to a system using a shock absorber as in the fourth embodiment, the damping constant c in the equation (5) becomes variable, and this point needs to be taken into consideration.
In the third embodiment, the damping force actually generated by the shock absorber 103 using the damping force variable calculation unit 130 from the relative speed obtained by differentiating the estimated relative displacement and the control command value of the controller 112. The disturbance observer is configured to input the estimated value as an external force acting on the vehicle body 105 to the observer as f, and the fluctuation of the relative speed due to the variable damping force is cancelled.
In the fourth embodiment, the sprung speed estimation circuit 115 is configured by a Kalman filter. However, other types of observers may be used.
ワープ算出部116は、図13に示すように、積分回路114からの車体右前輪部のばね上速度vFR及びばね上速度推定回路115からの車体左後輪部のばね上速度vRLの差(vFR-vRL)をとり、これらの距離〔車体右前輪部・車体左後輪部間の距離〕で割ることによりワープwpを算出する。
ピッチ推定部117は、図14に示すように、車輪速センサ111FR、111FLが検出する左右前輪102FL、102FRの車輪速の平均値を演算し、得られた平均値を微分処理して車輪加速度を算出する。この車輪加速度と前後加速度センサ108が検出する前後加速度の差をとり、得られた信号を積分し、フィルタ処理及び増幅処理を行なってピッチレートptを推定する。車体左右前輪部の車輪速の平均値を演算することにより、加減速による車速変動をキャンセルするようにしている。
ロール算出部118は、図15に示すように、ワープ算出部116で算出したワープwpからピッチ推定部117で推定されたピッチ成分ptを引くことでロール成分であるロールレートrolを算出する。
As shown in FIG. 13, the warp calculation unit 116 calculates the difference between the sprung speed vFR of the right front wheel of the vehicle body from the integration circuit 114 and the sprung speed vRL of the left rear wheel of the vehicle body from the sprung speed estimation circuit 115 (vFR -vRL), and the warp wp is calculated by dividing by these distances [distance between the right front wheel portion of the vehicle body and the left rear wheel portion of the vehicle body].
As shown in FIG. 14, the pitch estimation unit 117 calculates an average value of the wheel speeds of the left and right front wheels 102FL and 102FR detected by the wheel speed sensors 111FR and 111FL, and differentiates the obtained average value to obtain a wheel acceleration. calculate. The difference between the wheel acceleration and the longitudinal acceleration detected by the longitudinal acceleration sensor 108 is taken, the obtained signal is integrated, the filter processing and the amplification processing are performed, and the pitch rate pt is estimated. By calculating the average value of the wheel speeds of the left and right front wheel parts of the vehicle body, vehicle speed fluctuations due to acceleration / deceleration are canceled.
As illustrated in FIG. 15, the roll calculation unit 118 calculates a roll rate rol that is a roll component by subtracting the pitch component pt estimated by the pitch estimation unit 117 from the warp wp calculated by the warp calculation unit 116.
バウンス推定部119は、図16に示すように、車体右前輪部、車体左後輪部のばね上速度vFR,vRLの入力を受け、さらに、これらデータを用いて、次のように車体左前輪部、車体右後輪部のばね上速度vFL,vRRを算出し、車体右前輪部、車体左後輪部のばね上速度vFR,vRLと合わせて、各車輪位置でのばね上速度vFL,vRR,vFR,vRL、ひいては車体105のバウンス運動を推定する。
車体左前輪部のばね上速度vFLは、積分回路114が得た車体右前輪部のばね上速度vFR、ロール算出部118が得たロールレートrol、及び左右前輪のショックアブソーバ103FL、103FRの距離を用いて算出する。
車体右後輪部のばね上速度vRRは、ばね上速度推定回路115が得た車体左後輪部のばね上速度vRL、ロール算出部118が得たロールレートrol、及び左右後輪のショックアブソーバ103RL、103RRの距離を用いて算出する。
As shown in FIG. 16, the bounce estimation unit 119 receives the sprung speeds vFR and vRL of the right front wheel portion and the left rear wheel portion of the vehicle body, and further uses these data to And spring right speed vFL, vRR of the right rear wheel part of the vehicle body and the sprung speeds vFL, vRR at each wheel position together with the sprung speeds vFR, vRL of the right front wheel part and left rear wheel part of the vehicle body. , VFR, vRL, and thus the bounce motion of the vehicle body 105 is estimated.
The sprung speed vFL of the left front wheel part of the vehicle body is the distance between the sprung speed vFR of the right front wheel part of the vehicle body obtained by the integrating circuit 114, the roll rate rol obtained by the roll calculating unit 118, and the shock absorbers 103FL and 103FR of the left and right front wheels. Use to calculate.
The sprung speed vRR of the right rear wheel portion of the vehicle body includes the sprung speed vRL of the left rear wheel portion of the vehicle body obtained by the sprung speed estimation circuit 115, the roll rate rol obtained by the roll calculating unit 118, and the shock absorbers of the left and right rear wheels. Calculation is performed using the distance of 103RL and 103RR.
前輪相対速度推定部120は、図17に示すように、減衰力可変分算出部(2つ設けられており、以下、適宜、第1、第2減衰力可変分算出部130A、130Bという。)及び現代制御理論を適用したカルマンフィルタ(2つ設けられており、以下、適宜、第1、第2カルマンフィルタ131A、131Bという。)を含んで構成され、ばね上加速度センサ107の検出値(右前輪部のばね上加速度αFR)、ロール算出部118のロールレートrol、バウンス推定部119のばね上速度vFR、vRR、vFL、vRLの入力を受け、右前輪の相対速度vsFR及び左前輪の相対速度vsFLを推定する。なお、ロール算出部118のロールレートrolの絶対値が予め定めた閾値より小さい場合は、左右速度が同じ、つまり相対速度FR=相対速度FLとして出力し、また、閾値より大きい場合は、バウンス推定部119の推定したばね上速度(vFR、vRR、vFL、vRL)から第1、第2カルマンフィルタ131A、131Bを用いて相対速度を算出した値(右前輪、左前輪の相対速度vsFR,vsFL)を選択し、出力する。 As shown in FIG. 17, the front wheel relative speed estimation unit 120 is provided with a variable damping force calculation unit (two are provided, and hereinafter referred to as first and second variable damping force calculation units 130A and 130B as appropriate). And a Kalman filter to which modern control theory is applied (two are provided, hereinafter referred to as first and second Kalman filters 131A and 131B as appropriate), and is detected by the sprung acceleration sensor 107 (right front wheel part). ), The roll rate rol of the roll calculation unit 118, and the sprung speeds vFR, vRR, vFL, and vRL of the bounce estimation unit 119, and the relative speed vsFR of the right front wheel and the relative speed vsFL of the left front wheel. presume. When the absolute value of the roll rate rol of the roll calculation unit 118 is smaller than a predetermined threshold value, the left and right speeds are the same, that is, the relative speed FR = relative speed FL is output. The values (relative speed vsFR, vsFL of the front right wheel and the front left wheel) calculated from the sprung speed (vFR, vRR, vFL, vRL) estimated by the unit 119 using the first and second Kalman filters 131A, 131B are calculated. Select and output.
ここで、前輪相対速度推定部120で用いるカルマンフィルタ(131A、131B)についてさらに説明する。なお、ばね上速度推定回路115で用いるカルマンフィルタと同等部分については、その説明を省略する。
カルマンフィルタ(オブザーバ)は、ばね上速度推定回路115のカルマンフィルタ131と同等のモデル(図12参照)を用いて設計し、状態変数は、
The Kalman filter (observer) is designed using a model equivalent to the Kalman filter 131 of the sprung speed estimation circuit 115 (see FIG. 12).
ここで、式(9)に示すようにされている。
よって、ばね上の絶対加速度が測定可能であると考えると、式(7)よりカルマンフィルタ(オブザーバ)は、式(10)に示すように構成される。
オブザーバゲインLは、ばね上速度推定回路115のカルマンフィルタ131と同様のもの〔式(8)参照〕を用いる。減衰力可変分を考慮するため、ばね上速度推定回路115と同様に第1,第2減衰力可変分算出部130A,130Bでは、第1、第2カルマンフィルタ131A,131Bが得る相対速度推定値とスカイフック制御部123が演算した制御指令値とを用いて減衰力変化を算出し、第1、第2カルマンフィルタ131A,131Bにフィードバックしている。 The observer gain L is the same as that of the Kalman filter 131 of the sprung speed estimation circuit 115 [see Expression (8)]. In order to take into account the damping force variable, the first and second damping force variable calculation units 130A and 130B, like the sprung speed estimation circuit 115, calculate the relative velocity estimation values obtained by the first and second Kalman filters 131A and 131B. The damping force change is calculated using the control command value calculated by the skyhook control unit 123 and fed back to the first and second Kalman filters 131A and 131B.
次に、後輪相対速度推定部122について説明する。後輪相対速度推定部122は、図18に示すように、左後輪に対応して設けられる車高センサ110の検出値を微分して得られる左後輪の相対速度vsRL、ロール算出部118が算出したロールレートrol、バウンス推定部119のばね上速度(推定値)〔(vFR,vRL,vFL,vRR〕の入力を受ける。ここで、ロール算出部118の算出値(ロールレイトrol)の絶対値が閾値より小さい場合、左右で相対速度が同じ、つまり相対速度vsFR=相対速度vsFLとして出力し、また、閾値より大きい場合は、バウンス推定部119の推定したばね上速度からカルマンフィルタ131Cを用いて相対速度を算出した値(右前輪部、左前輪部の相対速度FR,FL)を選択し、出力する。
このカルマンフィルタ131Cは前輪の相対速度推定部120で用いたものと同様である。
Next, the rear wheel relative speed estimation unit 122 will be described. As shown in FIG. 18, the rear wheel relative speed estimation unit 122 differentiates the detection value of the vehicle height sensor 110 provided corresponding to the left rear wheel, the left rear wheel relative speed vsRL, and the roll calculation unit 118. Is input of the roll rate rol calculated by the above-mentioned, and the sprung speed (estimated value) [(vFR, vRL, vFL, vRR]] of the bounce estimating unit 119. Here, the calculated value (roll rate rol) of the roll calculating unit 118 When the absolute value is smaller than the threshold value, the left and right relative speeds are the same, that is, relative speed vsFR = relative speed vsFL is output. When the absolute value is larger than the threshold value, the Kalman filter 131C is used from the sprung speed estimated by the bounce estimating unit 119. Then, the values (relative speeds FR and FL of the right front wheel part and the left front wheel part) calculated relative speed are selected and output.
The Kalman filter 131C is the same as that used in the front wheel relative speed estimation unit 120.
上述したようにして、車体105のピッチレートpt、ロールレートrol、各輪のばね上速度、及び相対速度を算出し、算出された信号を用いて、スカイフック制御部123が制御指令値を生成し、各ショックアブソーバ103に出力する。 As described above, the pitch rate pt, the roll rate rol, the sprung speed of each wheel, and the relative speed are calculated, and the skyhook control unit 123 generates a control command value using the calculated signals. And output to each shock absorber 103.
本実施形態によれば、各車輪102及び車体105の相対速度を算出してこれを用いてスカイフック制御のための制御指令値を算出するようにしている。このため、各輪に対応したショックアブソーバ103に対して個別に制御指令値を生成でき、ひいては各輪に対応したショックアブソーバ103の減衰力発生制御を精度高く行うことができる。 According to the present embodiment, the relative speeds of the wheels 102 and the vehicle body 105 are calculated and used to calculate the control command value for skyhook control. For this reason, a control command value can be individually generated for the shock absorber 103 corresponding to each wheel, and hence the damping force generation control of the shock absorber 103 corresponding to each wheel can be performed with high accuracy.
また、本実施形態では、車体105の2箇所の対角部のばね上速度から車体105のワープwpを求め、車輪速から得られるピッチレートptを前記ワープwpから減算することによりロールレートrolを算出し、前記2箇所の対角部のうち一方の箇所のばね上速度及びロールレートrolから車体105の4輪に対応した部分のばね上速度並びに各車輪102及び車体105の相対速度を得ており、スカイフック制御のための制御指令値の生成に用いることができる。車体105の2箇所の対角部のばね上速度検出のために、加速度センサや車高センサ等の対応するセンサとしては、2個用意すればよいため、装置構成を簡素化でき、ひいてはコストダウンを図ることができる。 Further, in this embodiment, the warp wp of the vehicle body 105 is obtained from the sprung speeds of the two diagonal portions of the vehicle body 105, and the roll rate rol is obtained by subtracting the pitch rate pt obtained from the wheel speed from the warp wp. Calculate and obtain the sprung speed of the part corresponding to the four wheels of the vehicle body 105 and the relative speed of each wheel 102 and the vehicle body 105 from the sprung speed and roll rate rol of one of the two diagonal parts. And can be used to generate a control command value for skyhook control. In order to detect the sprung speed at the two diagonal parts of the vehicle body 105, two corresponding sensors, such as an acceleration sensor and a vehicle height sensor, need only be prepared, so that the device configuration can be simplified and the cost can be reduced. Can be achieved.
上記第4実施形態では、ばね上加速度センサ107及び車高センサ110を車体105の対角に設けた場合を例にしたが、2つのばね上加速度センサを設けてもよいし、2つの車高センサを設けてもよい。また、2つのセンサの配置については、ピッチ方向に平行に配置されるのでなければ様々な位置に配置することができる。少しでもロール方向(左右方向)に位置がずれていれば、検出されるワープ運動にはロール成分が含まれるからピッチ運動を減算することでロールを算出できるからである。
また、第4実施形態では、車高センサ110を用いているが、光軸自動調整システム車両のように既にリヤに車高センサを搭載している車両に対しては、その車高センサを第3実施形態の車高センサ110として流用し、追加センサの数を抑えるようにし、構成の複雑化及びコストアップを避けるようにしてもよい。
In the fourth embodiment, the case where the sprung acceleration sensor 107 and the vehicle height sensor 110 are provided diagonally to the vehicle body 105 is exemplified. However, two sprung acceleration sensors may be provided or two vehicle heights may be provided. A sensor may be provided. The two sensors can be arranged at various positions unless they are arranged in parallel to the pitch direction. This is because if the position is slightly shifted in the roll direction (left-right direction), the detected warp motion includes a roll component, and thus the roll can be calculated by subtracting the pitch motion.
Further, although the vehicle height sensor 110 is used in the fourth embodiment, the vehicle height sensor is used for a vehicle that already has a vehicle height sensor mounted on the rear, such as an optical axis automatic adjustment system vehicle. It may be used as the vehicle height sensor 110 of the third embodiment so as to suppress the number of additional sensors and to avoid complication of configuration and cost increase.
第4実施形態では、上述したようにワープwpからピッチレートptを減算してロールレートrolを求め、このようにして得たロールレートrolを用いてバウンスひいては4輪対応部のばね上速度を得ると共に、この検出結果を利用して各車輪・車体の相対速度を得、ひいてはスカイフック制御の制御指令値を得るようにしている。これに対して、ワープwpからロールレートrolを減算してピッチレートptを求め、このようにして得たピッチレートptを用いてバウンスひいては4輪のばね上速度を得ると共に、この検出結果を利用して各車輪・車体の相対速度を得、ひいてはスカイフック制御の制御指令値を得るようにしてもよい。
また,第4実施形態では,ピッチレート,ロールレートをそれぞれ推定して求めたが,ジャイロセンサを取付けてもよい。勿論,カーナビなどの他システムが有するピッチレート,ロールレート信号を車体ネットワーク(CANなど)経由で取得して用いてもよい。
この第4実施形態で明らかなように、車体5の2箇所の対角におけるばね上速度を用いることにより4輪対応部のばね上速度及び各車輪・車体の相対速度を得て、4輪夫々に対応したショックアブソーバ3に対するスカイフック制御の制御指令値を算出するので、制御精度の向上を図ることができる。
なお、上記実施の形態のスカイフック制御では、減衰力反転型(伸び側と縮み側の減衰力の変化の大小が反転している)のショックアブソーバを用いた場合は、相対速度のデータは不要である。
なお、上記実施の形態では、スカイフック制御をベースに説明したが、四輪のばね上の運動(変位、速度、加速度)のデータから制御理論を用いて、ショックアブソーバの減衰力を決められればよく、例えば、H∞制御や、現代制御理論を用いた制御にもちいてもよい。
In the fourth embodiment, the roll rate rol is obtained by subtracting the pitch rate pt from the warp wp as described above, and the bounce and thus the sprung speed of the corresponding part of the four wheels is obtained using the roll rate rol thus obtained. At the same time, the detection results are used to obtain the relative speeds of the wheels and the vehicle body, thereby obtaining the control command value for the skyhook control. On the other hand, the pitch rate pt is obtained by subtracting the roll rate rol from the warp wp, and the bounce and the sprung speed of the four wheels are obtained by using the pitch rate pt thus obtained, and this detection result is used. Thus, the relative speeds of the wheels and the vehicle body may be obtained, and thus the control command value for skyhook control may be obtained.
In the fourth embodiment, the pitch rate and roll rate are estimated and obtained, but a gyro sensor may be attached. Of course, the pitch rate and roll rate signals of other systems such as a car navigation system may be acquired and used via a vehicle body network (such as CAN).
As is apparent from the fourth embodiment, the sprung speeds at the two diagonals of the
Note that the skyhook control of the above embodiment does not require relative velocity data when using a damping force reversal type shock absorber (in which the magnitude of the change in damping force on the expansion side and the contraction side is reversed). It is.
Although the above embodiment has been described based on the skyhook control, if the damping force of the shock absorber can be determined from the data (movement, displacement, speed, acceleration) on the four-wheel spring using the control theory. For example, it may be used for H∞ control or control using modern control theory.
<第5実施形態>
以下、本発明の第5実施形態を図19〜図25に基づき、説明する。
図19において、自動車(車両)を構成する車体と4個の車輪211(図は1輪分のみ記載している。)との間には、スプリング212と減衰特性を調整可能な減衰力可変ダンパ213とが並列に介装されており、これらが車体214を支持している。ダンパ213及びスプリング212は、4個の車輪に対応して夫々4個設けられているが、便宜上、そのうち一つのみを図示している。
車体214の一箇所には当該箇所における上下方向の加速度(ばね上上下加速度。以下、適宜、ばね上加速度という。)を検出するばね上加速度センサ201が設けられている。
ダンパ213は、図示しない減衰力発生部と、この減衰力発生部を駆動するアクチュエータ215とを備えている。
<Fifth Embodiment>
Hereinafter, a fifth embodiment of the present invention will be described with reference to FIGS.
In FIG. 19, a spring 212 and a damping force variable damper capable of adjusting damping characteristics are provided between a vehicle body constituting an automobile (vehicle) and four wheels 211 (only one wheel is shown in the figure). 213 are interposed in parallel, and these support the vehicle body 214. Four dampers 213 and four springs 212 are provided corresponding to the four wheels, but only one of them is shown for convenience.
A sprung acceleration sensor 201 is provided at one location of the vehicle body 214 to detect vertical acceleration (sprung vertical acceleration, hereinafter referred to as sprung acceleration as appropriate) at that location.
The damper 213 includes a damping force generation unit (not shown) and an actuator 215 that drives the damping force generation unit.
また、自動車には、図20に示すように、操舵角センサ216、車速センサ217、横加速度センサ218及び四輪に対応して配置される車輪速センサ205が設けられている。
ばね上加速度センサ201及びアクチュエータ215、操舵角センサ216、車速センサ217、横加速度センサ218及び車輪速センサ205にコントローラ220が接続されている。
コントローラ220は、図20に示すように、微分処理部221、B.P.F処理部(以下、ピッチ加速度B.P.F処理部という。)222、係数乗算部(以下、第1係数乗算部という。)223、推定横加速度算出部224、路面入力影響の横加速度算出部225、B.P.F処理部(以下、ロール加速度B.P.F処理部という。)226、係数乗算部(以下、第2係数乗算部という。)227、四輪ばね上加速度演算部228、積分処理部(以下、四輪対応積分処理部という。)229、四輪相対速度演算部230、及びスカイフック演算部231を備えている。
Further, as shown in FIG. 20, the vehicle is provided with a steering angle sensor 216, a vehicle speed sensor 217, a lateral acceleration sensor 218, and a wheel speed sensor 205 arranged corresponding to the four wheels.
A
As shown in FIG. 20, the
微分処理部221は、車輪速センサ205が得た車輪速情報から車輪加速度を求める。
ピッチ加速度B.P.F処理部222は、微分処理部221からの車輪加速度信号をB.P.F(バンドパスフィルタ)処理してピッチ加速度成分を抜き出す。
第1係数乗算部223は、ピッチ加速度B.P.F処理部222で抜き出されたピッチ加速度成分に所定の係数を乗算してピッチ加速度を算出する。
The differential processing unit 221 obtains wheel acceleration from the wheel speed information obtained by the wheel speed sensor 205.
The pitch acceleration BPF processing unit 222 performs a BPF (band pass filter) process on the wheel acceleration signal from the differentiation processing unit 221 to extract a pitch acceleration component.
The first coefficient multiplication unit 223 calculates the pitch acceleration by multiplying the pitch acceleration component extracted by the pitch acceleration BPF processing unit 222 by a predetermined coefficient.
推定横加速度算出部224は、操舵角センサ216が得た操舵角情報と、車速センサ217が得た車速情報とから、操舵により発生する「旋回影響の横加速度」(推定横加速度)を求める。
路面入力影響の横加速度算出部225は、推定横加速度算出部224が得た「旋回影響の横加速度」と、横加速度センサ218が得た横加速度情報とから「路面入力影響の横加速度」を求める。
ロール加速度B.P.F処理部226は、「路面入力影響の横加速度」をB.P.F処理してロール加速度成分を抜き出す。
第2係数乗算部227は、ロール加速度B.P.F処理部226で抜き出されたロール加速度成分に所定の係数を乗算してロール加速度を算出する。
The estimated lateral acceleration calculation unit 224 obtains “lateral acceleration due to turning” (estimated lateral acceleration) generated by steering from the steering angle information obtained by the steering angle sensor 216 and the vehicle speed information obtained by the vehicle speed sensor 217.
The road surface input influence lateral acceleration calculation unit 225 calculates the “road surface input influence lateral acceleration” from the “turning influence lateral acceleration” obtained by the estimated lateral acceleration calculation section 224 and the lateral acceleration information obtained by the lateral acceleration sensor 218. Ask.
The roll acceleration BPF processing unit 226 performs BPF processing on “lateral acceleration due to road surface input influence” to extract a roll acceleration component.
The second coefficient multiplication unit 227 multiplies the roll acceleration component extracted by the roll acceleration BPF processing unit 226 by a predetermined coefficient to calculate the roll acceleration.
四輪ばね上加速度演算部228は、ばね上加速度センサ1で得られたばね上加速度(ばね上上下加速度)情報と、第1係数乗算部223からのピッチ加速度と、第2係数乗算部227からのロール加速度とから、車体214における四輪夫々の対応部分の上下加速度に相当する四輪ばね上上下加速度(以下、適宜、四輪ばね上加速度という。)を求める。
四輪対応積分処理部229は、四輪ばね上加速度演算部228が求めた四輪ばね上上下加速度から四輪ばね上上下速度(以下、適宜、四輪ばね上速度という。)を求める。
四輪相対速度演算部230は、図24に示すようにカルマンフィルタ240(オブザーバ)及び減衰力可変分算出部241を含んで構成されており、四輪ばね上加速度演算部228が求めた四輪ばね上加速度から、四輪の夫々と車体214における四輪対応部分との相対速度(ばね上/ばね下相対速度。以下、適宜、四輪相対速度という。)を求める。
スカイフック演算部231は、四輪対応積分処理部229が求めた四輪ばね上速度と、四輪相対速度演算部230が求めた四輪相対速度から各アクチュエータ215に対するスカイフック制御のための指令電流(減衰力指令値。制御指令値)を生成し、これを対応するアクチュエータ215に入力することにより、各ダンパ213を制御する。
The four-wheel sprung acceleration calculation unit 228 includes sprung acceleration (sprung vertical acceleration) information obtained by the sprung
The four-wheel integration processing unit 229 obtains a four-wheel spring up-down speed (hereinafter, referred to as a four-wheel spring up-speed as appropriate) from the four-wheel spring up-down acceleration obtained by the four-wheel spring up-acceleration calculation unit 228.
As shown in FIG. 24, the four-wheel relative speed calculation unit 230 includes a Kalman filter 240 (observer) and a damping force variable calculation unit 241, and the four-wheel spring acceleration calculation unit 228 calculates the four-wheel spring. From the upper acceleration, the relative speed between each of the four wheels and the corresponding portion of the four wheels in the vehicle body 214 (sprung / unsprung relative speed, hereinafter referred to as the four-wheel relative speed as appropriate) is obtained.
The skyhook calculation unit 231 is a command for skyhook control for each actuator 215 from the four-wheel sprung speed obtained by the four-wheel integration processing unit 229 and the four-wheel relative speed obtained by the four-wheel relative speed calculation unit 230. Each damper 213 is controlled by generating a current (damping force command value; control command value) and inputting the current to the corresponding actuator 215.
この実施形態では、車輪速センサ205からの車輪速に対して微分処理(微分処理部221)を行って得られるピッチ加速度を利用して四輪ばね上速度及び四輪相対速度を求めるようにしている。この実施形態によれば、車輪速センサ205が検出した車輪速から得たピッチ加速度を用いて算出するようにしているので、上記車体加減速による影響を最小限に抑えることができる。 In this embodiment, the four-wheel sprung speed and the four-wheel relative speed are obtained using the pitch acceleration obtained by performing differential processing (differential processing unit 221) on the wheel speed from the wheel speed sensor 205. Yes. According to this embodiment, since the calculation is made using the pitch acceleration obtained from the wheel speed detected by the wheel speed sensor 205, the influence of the vehicle body acceleration / deceleration can be minimized.
本実施形態では、ばね上上下加速度とピッチ加速度によるリアばね上上下加速度の推定により、ばね上上下加速度についてはばね上加速度センサ201の検出値をそのまま使用することで誤差を生じることはない。
車輪加速度推定に関しては、車輪速度推定のように、ある狭い周波数成分(例えばばね上共振)に限定することなく、極低周波数領域(例えば0.05Hz)以下と極高周波数領域(例えば15Hz)以上の周波数領域を抜き出すことで推定可能であり、周波数を限定された推定にはならない。このことより、車輪加速度によるピッチ加速度推定、ばね上上下加速度とピッチ加速度によるリアばね上上下加速度の方が精度よく推定可能である。
In this embodiment, by estimating the rear sprung vertical acceleration based on the sprung vertical acceleration and the pitch acceleration, no error is caused by using the detected value of the sprung acceleration sensor 201 as it is for the sprung vertical acceleration.
Regarding wheel acceleration estimation, it is not limited to a certain narrow frequency component (for example, sprung resonance), as in the case of wheel speed estimation, and is extremely low frequency region (for example, 0.05 Hz) or less and extremely high frequency region (for example, 15 Hz) or more. It can be estimated by extracting the frequency domain, and the frequency is not limited. Thus, it is possible to accurately estimate the pitch acceleration estimation based on the wheel acceleration, and the sprung vertical acceleration and the rear sprung vertical acceleration based on the pitch acceleration.
また、この実施形態では、四輪ばね上上下加速度を入力データとして受けるカルマンフィルタ240(オブザーバ)による推定により、推定可能な状態量が、ばね上/ばね下間相対速度となる。このため、この実施の形態では、演算処理を短縮でき、さらに、微分処理とフィルタ処理を行うことで生じる演算誤差も除去することができ、減衰力指示値を精度高く生成でき、良好にサスペンション制御を行うことができる。
また、この実施形態では、操舵角、車速、横加速度から推定したロール加速度により、ロール変化分を補正することで、四輪全てのばね上上下加速度、ばね上上下速度及びばね上/ばね下間相対速度を算出し、これにより推定精度と制振性能を向上したものになっている。このため、この実施形態では、優れた制振性能を確保できる。
In this embodiment, the state quantity that can be estimated by the estimation by the Kalman filter 240 (observer) that receives the four-wheel sprung vertical acceleration as input data is the sprung / unsprung relative speed. Therefore, in this embodiment, calculation processing can be shortened, calculation errors caused by differential processing and filter processing can be eliminated, damping force instruction values can be generated with high accuracy, and suspension control can be performed satisfactorily. It can be performed.
Further, in this embodiment, by correcting the roll change based on the roll acceleration estimated from the steering angle, the vehicle speed, and the lateral acceleration, the sprung vertical acceleration, the sprung vertical speed, and the sprung / unsprung distance of all four wheels are corrected. Relative speed is calculated, which improves the estimation accuracy and vibration control performance. For this reason, in this embodiment, excellent vibration damping performance can be ensured.
ここで、図21のフローチャートを用いてコントローラ220の処理内容を説明し、本実施形態の作用をさらに詳しく説明する。
図21において、コントローラ220に電力が供給され、制御ソフトウェアの実行が始まる(ステップS1)。そして、まず、コントローラ220の初期設定を行う(ステップS2)。次に、所定の制御周期に達したか否かの判定を行う(ステップS3)。ステップS3で、いまだ制御周期に達していないと判定したときは、上流へ戻り、再度、制御周期に達しているか否かの判定を行う。ステップS3で制御周期に達した(YES)と判定すると、前制御周期にて演算された制御量をアクチュエータ215に出力する(ステップS4)。その後、各センサ情報を読込む(ステップS5)。
次に、センサ情報を対応する部分に入力し(ステップS6)、この入力されたセンサ情報に基づいて、ステップS7の制御演算実行部(制御演算実行サブルーチン)で、ばね上速度、ばね上/ばね下間相対速度の推定演算を行うと共に、アクチュエータ指令値(アクチュエータ指令電流。減衰力指令値)の演算を行う。
Here, the processing content of the
In FIG. 21, power is supplied to the
Next, sensor information is input to the corresponding part (step S6). Based on the input sensor information, the control calculation execution unit (control calculation execution subroutine) of step S7 sets the sprung speed, sprung / spring. The lower relative speed is estimated and calculated, and the actuator command value (actuator command current, damping force command value) is calculated.
制御演算実行部の処理内容を図22(フローチャート)及び図23(ばね上上下加速度、ピッチ加速度、ロール加速度の対応関係図)に基づいて説明する。
図22において、まず、フロント車輪速度信号を微分処理して車輪加速度を算出する(ステップS11)。次に、車輪加速度信号をバンドパスフィルタ処理して所定の周波数成分を有するピッチ加速度成分を抽出する(ステップS12)。
次に、操舵角及び車速から旋回運動によって発生している推定横加速度を算出する(ステップS13)。車両の線形モデルを仮定し、動特性を無視すると、推定横加速度ayは次式で表すことができる。
The processing content of the control calculation execution unit will be described with reference to FIG. 22 (flow chart) and FIG. 23 (corresponding relationship diagram of sprung vertical acceleration, pitch acceleration, roll acceleration).
In FIG. 22, first, the wheel acceleration is calculated by differentiating the front wheel speed signal (step S11). Next, the wheel acceleration signal is subjected to bandpass filter processing to extract a pitch acceleration component having a predetermined frequency component (step S12).
Next, the estimated lateral acceleration generated by the turning motion is calculated from the steering angle and the vehicle speed (step S13). If a linear model of the vehicle is assumed and dynamic characteristics are ignored, the estimated lateral acceleration ay can be expressed by the following equation.
ay=[1/(1+AV2)]・[V2/(Lh)]δf
Vは、車速〔m/s〕、Aはスタビリティファクタ〔s2/m2〕、δfは前輪舵角〔rad〕、Lhはホイールベース〔m〕である。
ay = [1 / (1 + AV2)]. [V2 / (Lh)] δf
V is the vehicle speed [m / s], A is the stability factor [
一方、横加速度センサ218により検出した横加速度は、操舵により発生する旋回横加速度と、路面入力の影響による車体ロール運動に伴って発生する横加速度(「路面入力影響の横加速度」)との両方の横加速度を含んでいる。そこで、操舵角と車速より推定した推定横加速度を、センサにより検出した横加速度(実横加速度)から減算することで、「路面入力影響による横加速度」〔=(実横加速度)-(推定横加速度)〕を算出する(ステップS14)。 On the other hand, the lateral acceleration detected by the lateral acceleration sensor 218 includes both the turning lateral acceleration generated by steering and the lateral acceleration generated by the vehicle body roll motion due to the influence of the road surface input (“lateral acceleration due to the road surface input effect”). The lateral acceleration is included. Therefore, by subtracting the estimated lateral acceleration estimated from the steering angle and vehicle speed from the lateral acceleration detected by the sensor (actual lateral acceleration), the “lateral acceleration due to road surface input” [= (actual lateral acceleration)-(estimated lateral acceleration) Acceleration)] is calculated (step S14).
「路面入力影響による横加速度」(路面入力の影響による車体ロール運動により発生する横加速度)は、ロール加速度の接線方向加速度であるので、横加速度をバンドパスフィルタ処理して、所定の周波数成分を有するロール加速度成分を抽出する(ステップS15)。 “Lateral acceleration due to road surface input” (lateral acceleration generated by vehicle body roll motion due to road surface input) is a tangential acceleration of roll acceleration, and therefore, the lateral acceleration is subjected to bandpass filter processing to obtain a predetermined frequency component. The roll acceleration component is extracted (step S15).
次に、四輪のばね上加速度の算出を行う(ステップS16)。ここで、車体214の任意の位置での上下加速度は、図23(a)に示すように、車体214を剛体として考えると、車体214とある1点のばね上上下速度とピッチレート、ロールレートが判ると幾何学的に決定される。ばね上加速度センサ(ばね上上下加速度センサ)201が図23(b)に示すように配置されているときの同軸上のばね上上下加速度の算出方法を以下に説明する。
後述する式でG sensorは、ばね上加速度センサ201取付位置でのばね上上下加速度〔m/s2〕、G FRはフロントばね上上下加速度〔m/s2〕、G RRはリアばね上上下加速度〔m/s2〕、 L1はばね上加速度センサ201取付位置から観測したいフロントばね上上下加速度までの距離、L2はばね上加速度センサ201取付位置から観測したリアばね上上下加速度までの距離、AGyはピッチ加速度〔rad/s2〕をそれぞれ示す。
Next, the sprung acceleration of the four wheels is calculated (step S16). Here, as shown in FIG. 23 (a), the vertical acceleration at an arbitrary position of the vehicle body 214 is determined by assuming that the vehicle body 214 is a rigid body. Is determined geometrically. A method for calculating the on-spring sprung vertical acceleration when the sprung acceleration sensor (sprung vertical acceleration sensor) 201 is arranged as shown in FIG. 23B will be described below.
G sensor is the vertical acceleration [m / s 2 ] on the spring at the mounting position of the spring acceleration sensor 201, G FR is the vertical acceleration on the front spring [m / s 2 ], and G RR is the vertical on the rear spring. Acceleration [m / s 2 ], L1 is the distance from the mounting position on the sprung acceleration sensor 201 to the front spring vertical acceleration to be observed, L2 is the distance from the mounting position on the spring acceleration sensor 201 to the vertical acceleration on the rear spring, AGy represents pitch acceleration [rad / s 2 ].
フロントばね上上下加速度G FRは次式で求めることができる。
G FR=G sensor+AGy×L1
また、リアばね上上下加速度G RRは次式で求めることができる。
G RR =G sensor-AGy× L2
The front sprung vertical acceleration G FR can be obtained by the following equation.
G FR = G sensor + AGy × L1
Further, the vertical acceleration G RR on the rear spring can be obtained by the following equation.
G RR = G sensor-AGy × L2
このようにばね上加速度センサ201の配置位置から観測したい位置までの距離と、回転速度が分かれば、観測したい位置のばね上上下加速度を求めることができる。
ロール加速度による左右軸上に配置された位置でのばね上上下加速度もピッチ加速度による推定と同様に求めることができる。
Thus, if the distance from the position where the sprung acceleration sensor 201 is located to the position to be observed and the rotational speed are known, the sprung vertical acceleration at the position to be observed can be obtained.
The sprung vertical acceleration at the position arranged on the left and right axis by the roll acceleration can also be obtained in the same manner as the estimation by the pitch acceleration.
次に、図23(c)に示すように、ばね上加速度センサ201が配置された車両において、各輪のダンパ213位置のばね上上下加速度の算出方法を以下に示す。
G sensorをばね上加速度センサ1取付位置でのばね上上下加速度〔m/s2〕、G FRをフロント右のばね上上下加速度〔m/s2〕、G FLをフロント右のばね上上下加速度〔m/s2〕、G RRを右のリアばね上上下加速度〔m/s2〕、G RLを左のリアばね上上下加速度〔m/s2〕とする。また、 L1はばね上加速度センサ201取付位置から観測したいフロントばね上上下加速度までのy軸上の距離、L2はばね上加速度センサ201取付位置から観測したリアばね上上下加速度までのy軸上の距離、Wf1はばね上加速度センサ201取付位置から観測したいフロント右のばね上上下加速度までのx軸上の距離、Wf2はばね上加速度センサ201取付位置から観測したいフロント左のばね上上下加速度までのx軸上の距離、Wr1はばね上加速度センサ201取付位置から観測したいリア右のばね上上下加速度までのx軸上の距離、Wf2はばね上加速度センサ201取付位置から観測したいリア左のばね上上下加速度までのx軸上の距離、AGyはピッチ加速度〔rad/s2〕、AGxはロール加速度〔rad/s2〕、をそれぞれ示す。
Next, as shown in FIG. 23 (c), in the vehicle in which the sprung acceleration sensor 201 is arranged, a method for calculating the sprung vertical acceleration at the position of the damper 213 of each wheel will be described below.
G sensor is the sprung vertical acceleration [m / s 2 ], G FR is the front right sprung vertical acceleration [m / s 2 ], and G FL is the front right sprung vertical acceleration. [M / s 2 ], G RR is the right rear sprung vertical acceleration [m / s 2 ], and G RL is the left rear sprung vertical acceleration [m / s 2 ]. L1 is the distance on the y-axis from the mounting position on the sprung acceleration sensor 201 to the vertical acceleration on the front spring to be observed, and L2 is on the y-axis from the mounting position on the spring acceleration sensor 201 to the vertical acceleration on the rear spring. The distance, Wf1 is the distance on the x-axis from the mounting position of the sprung acceleration sensor 201 to the front right spring up-and-down acceleration, and Wf2 is the distance from the mounting position of the sprung acceleration sensor 201 to the front spring-upper vertical acceleration to be observed. The distance on the x-axis, Wr1 is the distance on the x-axis from the mounting position on the sprung acceleration sensor 201 to the rear right sprung vertical acceleration to be observed, and Wf2 is the spring on the left rear to be observed from the mounting position on the sprung acceleration sensor 201 Distance on the x-axis to vertical acceleration, AGy indicates pitch acceleration [rad / s 2 ], and AGx indicates roll acceleration [rad / s 2 ].
これから、フロント右のばね上上下加速度G FRは次式で求めることができる。
G FR=G sensor+AGy×L1- AGx×Wf2
また、フロント左のばね上上下加速度G FL は次式で求めることができる。
G FL=G sensor+AGy×L1+AGx×Wf1
また、リア右のばね上上下加速度G RRは次式で求めることができる。
G RR =G sensor-AGy× L2- AGx×Wf2
また、リア左のばね上上下加速度G RLは次式で求めることができる。
G RL =G sensor-AGy× L2+AGx×Wf1
このようにして求めた四輪のばね上上下加速度を求めることができ、また、四輪のばね上上下加速度を夫々、カルマンフィルタ240に入力し四輪の相対速度を算出する(ステップS17)。
From this, the front right sprung vertical acceleration GFR can be obtained by the following equation.
G FR = G sensor + AGy × L1-AGx × Wf2
The front left sprung vertical acceleration G FL can be obtained by the following equation.
G FL = G sensor + AGy × L1 + AGx × Wf1
Further, the rear right sprung vertical acceleration G RR can be obtained by the following equation.
G RR = G sensor-AGy x L2- AGx x Wf2
Further, the rear left sprung vertical acceleration G RL can be obtained by the following equation.
G RL = G sensor-AGy × L2 + AGx × Wf1
The four-wheel sprung vertical acceleration thus obtained can be obtained, and the four-wheel sprung vertical acceleration is input to the Kalman filter 240 to calculate the relative speed of the four wheels (step S17).
ここで、四輪相対速度演算部230についてさらに説明する。四輪相対速度演算部230は、図24に示すように、減衰力可変分算出部241(四輪に対応して4つ設けられている。そのうち、左右前輪に対応して2つのみ記載している。)及び現代制御理論を適用した前記カルマンフィルタ240(四輪に対応して4つ設けられている。そのうち、左右前輪に対応して2つのみ記載している。)を含んで構成されている。そして、四輪相対速度演算部230は、四輪ばね上加速度演算部228の算出値(四輪ばね上上下加速度)と、第2係数乗算部227が算出し四輪ばね上加速度演算部228を通して得られるロール加速度(推定値)と、第1係数乗算部223が算出し四輪ばね上加速度演算部228を通して得られるピッチ加速度(推定値)とを入力する。ここで、ロール加速度(推定値)の絶対値が予め定めた閾値より小さい場合は、左右速度が同じ、つまり相対速度FR=相対速度FL、相対速度RR=相対速度RLとして出力し、また、閾値より大きい場合は、四輪ばね上加速度推定部の推定した四輪ばね上加速度からカルマンフィルタ240を用いて相対速度を算出した値を選択し、出力する。 Here, the four-wheel relative speed calculation unit 230 will be further described. As shown in FIG. 24, the four-wheel relative speed calculation unit 230 is provided with four damping force variable calculation units 241 (four corresponding to the four wheels. Of these, only two are described corresponding to the left and right front wheels. And the Kalman filter 240 to which modern control theory is applied (four are provided corresponding to the four wheels, of which only two are shown corresponding to the left and right front wheels). ing. Then, the four-wheel relative speed calculation unit 230 calculates the four-wheel spring acceleration acceleration unit 228 (four-wheel spring vertical acceleration) and the second coefficient multiplication unit 227 to calculate the four-wheel spring acceleration calculation unit 228. The roll acceleration (estimated value) obtained and the pitch acceleration (estimated value) calculated by the first coefficient multiplication unit 223 and obtained through the four-wheel sprung acceleration calculation unit 228 are input. Here, when the absolute value of the roll acceleration (estimated value) is smaller than a predetermined threshold value, the left and right speeds are the same, that is, output as relative speed FR = relative speed FL and relative speed RR = relative speed RL. If larger, a value obtained by calculating the relative speed using the Kalman filter 240 from the four-wheel spring acceleration estimated by the four-wheel spring acceleration estimation unit is selected and output.
以下に、ばね上加速度から相対速度を推定するオブザーバについて説明する。オブザーバは、図25に示す車体214の上下振動を1自由度でモデル化した1/4車体モデル〔Zb:車体214の絶対上下変位、Z0:ばね下の絶対上下変位、k:ばね定数、c:減衰係数、f:車体214に働く外力、m:車体214の質量〕を用いて設計し、状態変数は、
出力を上下加速度
入力を車体214に働く外力u=f、外乱をばね下加速度
Output vertical acceleration
External force u = f acting on the vehicle body 214 as input, disturbance under unsprung acceleration
ここで、式(9)に示すようにされている。 Here, it is as shown in Formula (9).
よって、ばね上の絶対加速度が測定可能であると考えると、式(9)よりカルマンフィルタ(オブザーバ)は、式(10)に示すように構成される。 Therefore, considering that the absolute acceleration on the spring can be measured, the Kalman filter (observer) is configured as shown in Expression (10) from Expression (9).
オブザーバゲインLは、カルマンフィルタ240を用いる。減衰力可変分を考慮するため、減衰力可変分算出部241では、カルマンフィルタ240の相対速度推定値とスカイフック演算部231が演算した制御指令値とを用いて減衰力変化を算出し、カルマンフィルタ240にフィードバックしている。
本実施形態によれば、ばね上加速度からの推定により、相対速度と相対変位をカルマンフィルタから直接推定できる。
For the observer gain L, the Kalman filter 240 is used. In order to take the damping force variable into consideration, the damping force variable calculating unit 241 calculates the damping force change using the estimated relative velocity of the Kalman filter 240 and the control command value calculated by the Skyhook calculating unit 231, and the Kalman filter 240. Have feedback.
According to this embodiment, the relative velocity and the relative displacement can be directly estimated from the Kalman filter by estimation from the sprung acceleration.
上述したようにして算出された四輪のばね上上下加速度を積分した四輪のばね上上下速度と、四輪の相対速度に基づいて四輪の目標減衰力が決定され(ステップS18)、その決定された目標減衰力によりアクチュエータ215に指示を与えることで四輪のダンパ213(四輪のサスペンション)の減衰力を制御する(ステップS19)。
なお、上記実施の形態では、スカイフック制御を行うため、各車輪のばね上上下速度と相対速度を求めて制御しているが、減衰力が伸縮反転するタイプの減衰力調整式油圧緩衝器を用いた場合は、相対速度は、必要としない。
また、上記実施の形態では、スカイフック演算部231を用いスカイフック制御を行った例を示したが、その他にも、H∞制御や各種現代制御理論を用いた制御に本発明を用いてもよい。この場合、四輪ばね上加速度演算部228で求めた各車輪のばね上加速度から絶対速度や相対速度など必要なデータを演算することが可能なので、そのデータを用いれば、各種制御理論に対応可能である。
The target damping force of the four wheels is determined based on the four-wheel sprung vertical speed obtained by integrating the four-wheel sprung vertical acceleration calculated as described above and the relative speed of the four wheels (step S18). By giving an instruction to the actuator 215 with the determined target damping force, the damping force of the four-wheel damper 213 (four-wheel suspension) is controlled (step S19).
In the above embodiment, in order to perform skyhook control, control is performed by determining the sprung vertical speed and relative speed of each wheel, but a damping force adjusting type hydraulic shock absorber of a type in which the damping force expands and contracts is reversed. When used, relative speed is not required.
In the above embodiment, an example in which the skyhook control unit 231 is used to perform the skyhook control is shown. However, the present invention can also be used for control using H∞ control or various modern control theories. Good. In this case, since necessary data such as absolute speed and relative speed can be calculated from the sprung acceleration of each wheel obtained by the four-wheel sprung acceleration calculation unit 228, the data can be used to support various control theories. It is.
1…サスペンション制御装置、4…減衰力可変式ショックアブソーバ(減衰力調整式緩衝器)、8…制御装置、20…前後加速度推定手段(前後加速度算出手段、ピッチレート推定装置)、21…ピッチレート推定手段(ピッチレート推定装置)、31…車輪速時間変化率算出手段(ピッチレート推定装置)、32…演算手段(ピッチレート推定装置)、52…ロールレート算出手段(ロールレート推定手段)、53…上下動演算手段、53A…上下動演算手段、54…コントロールユニット、61…第1の上下加速度算出手段、62…第2の上下加速度算出手段。
DESCRIPTION OF
Claims (9)
前記車体の任意の位置に設定される第1点の上下運動を算出する第1の上下運動算出手段と、
前記車体のロール運動を推定するロール運動推定手段と、
前記車体のピッチ運動を推定するピッチ運動推定手段と、
前記上下運動、前記ロール運動および前記ピッチ運動から前記車体の各部の上下運動を算出する各部上下運動算出手段と、
前記各部の上下運動に応じて指令を算出し、前記指令を前記減衰力調整式緩衝器に送るコントローラとからなり、
前記ピッチ運動推定手段は、
前記車輪の回転を検出し、当該検出結果から車輪速時間変化率を算出する車輪速時間変化率算出手段と、
前記車輪の回転を用いずに前記車体の前後加速度を検出または推定する前後加速度取得手段と、
前記車輪速時間変化率算出手段で算出した車輪速度時間変化率と前後加速度取得手段で取得した前後加速度との差からピッチレートを算出する減算手段とからなることを特徴とするサスペンション制御装置。 A suspension control device comprising a damping force adjustment type shock absorber that is interposed between a vehicle body and wheels of a vehicle and changes a damping characteristic according to an external command, and a control device that controls the damping characteristic, The control device
First vertical motion calculation means for calculating vertical motion of a first point set at an arbitrary position of the vehicle body;
Roll motion estimation means for estimating the roll motion of the vehicle body;
Pitch motion estimating means for estimating the pitch motion of the vehicle body;
Each part vertical motion calculating means for calculating vertical motion of each part of the vehicle body from the vertical motion, the roll motion and the pitch motion;
A command is calculated according to the vertical movement of each part, and the command is sent to the damping force adjusting shock absorber.
The pitch motion estimation means includes
A wheel speed time change rate calculating means for detecting rotation of the wheel and calculating a wheel speed time change rate from the detection result;
Longitudinal acceleration acquisition means for detecting or estimating the longitudinal acceleration of the vehicle body without using the rotation of the wheel;
A suspension control apparatus comprising: a subtracting means for calculating a pitch rate from a difference between a wheel speed time change rate calculated by the wheel speed time change rate calculating means and a longitudinal acceleration acquired by the longitudinal acceleration acquiring means .
前記制御装置は、積分手段を有し、
前記上下運動算出手段は前記車体の点の上下加速度を算出し、
前記ロール運動推定手段は前記車体のロール加速度を推定し、
前記ピッチ運動推定手段は前記車体のピッチ加速度を推定し、
前記各部上下運動算出手段は前記上下加速度、前記ロール加速度および前記ピッチ加速度から前記車体の各部の上下加速度を算出し、
前記積分手段は前記各部の上下加速度を積分して前記各部の上下速度を算出し、
前記コントローラは前記各部の上下速度に応じて指令を算出し、前記指令を前記減衰力調整式緩衝器に送ることを特徴とするサスペンション制御装置。 The suspension control apparatus according to claim 1, wherein
The control device has integration means,
The vertical motion calculating means calculates vertical acceleration of the point of the vehicle body,
The roll motion estimation means estimates the roll acceleration of the vehicle body,
The pitch motion estimation means estimates the pitch acceleration of the vehicle body,
Each part vertical motion calculation means calculates the vertical acceleration of each part of the vehicle body from the vertical acceleration, the roll acceleration and the pitch acceleration,
The integrating means calculates the vertical speed of each part by integrating the vertical acceleration of each part,
The controller calculates a command according to the vertical speed of each part and sends the command to the damping force adjustment type shock absorber.
前記車体のピッチ方向と異なる方向に前記第1点から離れた位置に設定される第2点の上下運動を算出する第2の上下運動算出手段と、
前記第1点の上下運動および第2点の上下運動からワープ運動を算出するワープ運動算出手段とを有し、
前記ロール運動推定手段は、前記ワープ運動と前記ピッチ運動の差から前記車体のロール運動を推定することを特徴とするサスペンション制御装置。 The suspension control apparatus according to claim 1, wherein
Second vertical motion calculating means for calculating vertical motion of a second point set at a position away from the first point in a direction different from the pitch direction of the vehicle body;
Warp motion calculating means for calculating a warp motion from the vertical motion of the first point and the vertical motion of the second point;
The suspension control device, wherein the roll motion estimation means estimates a roll motion of the vehicle body from a difference between the warp motion and the pitch motion.
前記車体のロール方向と異なる方向に前記第1点から離れた位置に設定される第2点の上下運動を算出する第2の上下運動算出手段と、
前記第1点の上下運動および第2点の上下運動からワープ運動を算出するワープ運動算出手段とを有し、
前記ピッチ運動推定手段は、前記ワープ運動と前記ロール運動の差から前記車体のピッチ運動を推定することを特徴とするサスペンション制御装置。 The suspension control apparatus according to claim 1, wherein
Second vertical motion calculating means for calculating vertical motion of a second point set at a position away from the first point in a direction different from the roll direction of the vehicle body;
Warp motion calculating means for calculating a warp motion from the vertical motion of the first point and the vertical motion of the second point;
The suspension controller according to claim 1, wherein the pitch motion estimation means estimates the pitch motion of the vehicle body from a difference between the warp motion and the roll motion.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008254753A JP5224048B2 (en) | 2008-09-30 | 2008-09-30 | Suspension control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008254753A JP5224048B2 (en) | 2008-09-30 | 2008-09-30 | Suspension control device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010083329A JP2010083329A (en) | 2010-04-15 |
| JP2010083329A5 JP2010083329A5 (en) | 2011-05-26 |
| JP5224048B2 true JP5224048B2 (en) | 2013-07-03 |
Family
ID=42247712
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008254753A Active JP5224048B2 (en) | 2008-09-30 | 2008-09-30 | Suspension control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5224048B2 (en) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101836490B1 (en) * | 2010-07-29 | 2018-03-08 | 히다치 오토모티브 시스템즈 가부시키가이샤 | Vehicle body posture control apparatus |
| JP5934470B2 (en) | 2011-03-30 | 2016-06-15 | 日立オートモティブシステムズ株式会社 | Suspension device |
| KR101257048B1 (en) * | 2011-06-09 | 2013-04-19 | 김영렬 | Apparatus of improving ride comfort for electric vehicles with in-wheel motor |
| JP5776374B2 (en) * | 2011-06-29 | 2015-09-09 | 日産自動車株式会社 | Suspension control device |
| JP5776375B2 (en) * | 2011-06-29 | 2015-09-09 | 日産自動車株式会社 | Suspension control device |
| JP5668872B2 (en) * | 2011-12-28 | 2015-02-12 | 日産自動車株式会社 | Vehicle control device |
| JP5783270B2 (en) * | 2012-01-25 | 2015-09-24 | 日産自動車株式会社 | Vehicle control apparatus and vehicle control method |
| WO2013111734A1 (en) * | 2012-01-25 | 2013-08-01 | 日産自動車株式会社 | Vehicle control system and vehicle control method |
| JP5970831B2 (en) * | 2012-01-26 | 2016-08-17 | 日産自動車株式会社 | Pitch rate estimation device |
| JP5807684B2 (en) * | 2012-01-26 | 2015-11-10 | 日産自動車株式会社 | Vehicle control apparatus and vehicle control method |
| JP6078950B2 (en) * | 2012-01-31 | 2017-02-15 | 日産自動車株式会社 | Vehicle control device |
| WO2013115006A1 (en) * | 2012-01-31 | 2013-08-08 | 日産自動車株式会社 | Vehicle control device |
| JP6003120B2 (en) * | 2012-03-15 | 2016-10-05 | 日産自動車株式会社 | Vehicle control apparatus and control method |
| JPWO2013161537A1 (en) * | 2012-04-26 | 2015-12-24 | 日産自動車株式会社 | Vehicle control apparatus and vehicle control method |
| WO2014192122A1 (en) * | 2013-05-30 | 2014-12-04 | トヨタ自動車株式会社 | Suspension system for vehicle |
| WO2019123848A1 (en) * | 2017-12-20 | 2019-06-27 | 三菱自動車工業株式会社 | Active suspension device for vehicle |
| CN109109601A (en) * | 2018-09-10 | 2019-01-01 | 燕山大学 | Inertia regulation Active Suspensions control system and control method based on vehicle pose deviation |
| KR102587419B1 (en) * | 2019-03-27 | 2023-10-10 | 히다치 아스테모 가부시키가이샤 | suspension control unit |
| KR20220161462A (en) * | 2020-07-08 | 2022-12-06 | 히다치 아스테모 가부시키가이샤 | Vehicle controls and suspension systems |
| JPWO2023189731A1 (en) * | 2022-03-30 | 2023-10-05 | ||
| WO2024195365A1 (en) * | 2023-03-22 | 2024-09-26 | 三菱自動車工業株式会社 | Attitude control device for vehicle |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3209030B2 (en) * | 1995-03-10 | 2001-09-17 | 日産自動車株式会社 | Vehicle suspension control device |
| JPH09226336A (en) * | 1996-02-22 | 1997-09-02 | Unisia Jecs Corp | Vehicle suspension device |
| JP2000283758A (en) * | 1999-03-30 | 2000-10-13 | Unisia Jecs Corp | Device for detecting attitude of vehicle |
| JP4905050B2 (en) * | 2006-10-18 | 2012-03-28 | トヨタ自動車株式会社 | Vehicle height control device |
-
2008
- 2008-09-30 JP JP2008254753A patent/JP5224048B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010083329A (en) | 2010-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5224048B2 (en) | Suspension control device | |
| KR101434678B1 (en) | Suspension control device | |
| JP5158333B2 (en) | Suspension control device | |
| JP5224039B2 (en) | Suspension control device | |
| JP5445532B2 (en) | Vehicle control device, vehicle control program, and vehicle control method | |
| US10118609B2 (en) | Driving force control device for a vehicle | |
| JP2009508751A (en) | SUSPENSION CONTROL DEVICE, VEHICLE EQUIPPED WITH SAME DEVICE, IMPLEMENTATION METHOD AND PROGRAM | |
| WO2019138617A1 (en) | Vehicle, vehicle motion status estimation device and vehicle motion status estimation method | |
| JP6810779B1 (en) | State quantity calculation device, control device and vehicle | |
| US20230347747A1 (en) | Method for controlling regenerative braking of vehicle | |
| KR102533560B1 (en) | Vehicle motion state estimation device, vehicle motion state estimation method, and vehicle | |
| JP5067620B2 (en) | Suspension control device | |
| JP2020117196A (en) | Vehicle motion state estimation device | |
| CN109203904B (en) | Travel control system for vehicle | |
| US20230302914A1 (en) | Method for controlling regenerative braking of vehicle | |
| CN116803797A (en) | Method for controlling driving force of vehicle | |
| CN116803796A (en) | Method for controlling driving force of vehicle | |
| JP2022065602A (en) | Vehicle attitude control device and vehicle | |
| JP7501491B2 (en) | Vehicle suspension control device and vehicle suspension control method | |
| JP2009226985A (en) | Vehicle body attitude control device | |
| US20220297703A1 (en) | Tire force estimator, four-wheeled vehicle, and tire force estimation method | |
| CN117246326A (en) | Method for controlling braking of a vehicle | |
| JP2023079384A (en) | Vibration information estimation device and suspension device | |
| KR20230122136A (en) | Slip state detection device and suspension control device | |
| JP2020185940A (en) | Vehicle motion state estimation device, and vehicle motion state estimation method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110411 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110411 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5224048 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160322 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |