JP5192669B2 - Projector, position adjusting device, and position adjusting method - Google Patents
Projector, position adjusting device, and position adjusting method Download PDFInfo
- Publication number
- JP5192669B2 JP5192669B2 JP2006208162A JP2006208162A JP5192669B2 JP 5192669 B2 JP5192669 B2 JP 5192669B2 JP 2006208162 A JP2006208162 A JP 2006208162A JP 2006208162 A JP2006208162 A JP 2006208162A JP 5192669 B2 JP5192669 B2 JP 5192669B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- projection
- angle
- rotation
- projector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Projection Apparatus (AREA)
Description
本発明は、プロジェクタと、プロジェクタや映写機などの画像投射装置の位置を調整するための位置調整装置および位置調整方法とに関する。 The present invention relates to a projector, and a position adjusting device and a position adjusting method for adjusting the position of an image projection apparatus such as a projector or a projector.
従来のプロジェクタは、使用する際に投射画像のピント調整および投射画像の歪みの修正を手動で行う必要があった。ただし、ピント調整については、オートフォーカス機能を用いて自動的に行うことが可能なプロジェクタもある。オートフォーカス機能に必要な動作の一つに、対象物までの距離を測定するということがある。距離を測定するための測距装置については、様々な工夫がなされている。 When using a conventional projector, it is necessary to manually adjust the focus of the projection image and correct the distortion of the projection image. However, there is a projector that can automatically perform focus adjustment using an autofocus function. One of the operations required for the autofocus function is to measure the distance to the object. Various devices have been devised for the distance measuring device for measuring the distance.
例えば、対象物までの距離を複数回測定し、平均値を計算し、バラツキを判定し、バラツキに対応して装置の構成の一つである発光手段の発光出力を制御する測距装置が開示されている(特許文献1参照)。 For example, a distance measuring device that measures the distance to an object multiple times, calculates an average value, determines variation, and controls the light emission output of light emitting means, which is one of the device configurations, corresponding to the variation is disclosed. (See Patent Document 1).
一方、プロジェクタには、投射レンズの代わりにミラーから画像を投射し、壁やスクリーンなどの投射面までの距離が短い場所での使用に適している超短焦点プロジェクタがある。超短焦点プロジェクタはミラー投射方式を用いて画像を投射面に投射する。 On the other hand, as a projector, there is an ultra-short focus projector that projects an image from a mirror instead of a projection lens and is suitable for use in a place where a distance to a projection surface such as a wall or a screen is short. An ultra-short focus projector projects an image on a projection surface using a mirror projection method.
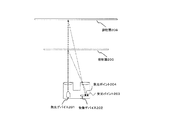
図12は、短焦点プロジェクタで用いられているミラー投射方式を説明するための模式図である。 FIG. 12 is a schematic diagram for explaining a mirror projection method used in a short focus projector.
図12に示すように、超短焦点プロジェクタは、画像表示素子のDMD(Digital Micromirror Device) 100から照射した画像をミラー101〜104に順に反射させて拡大し、ミラー104で反射させた画像を最終的に投射面に投射する。
上述したように、投写画像のピント調整にオートフォーカス機能を用いれば、操作者はピント合わせを自分で行う必要はない。しかし、プロジェクタと投射面とが水平方向(鉛直方向に垂直な方向)に関して正対していない場合に起こる投写画像の歪みに対しては、操作者自身がプロジェクタの位置を変えて、プロジェクタを投射面に正対させなければならない。 As described above, if the autofocus function is used for adjusting the focus of the projected image, the operator does not need to perform the focusing himself. However, for distortions in the projected image that occur when the projector and the projection surface are not facing each other in the horizontal direction (perpendicular to the vertical direction), the operator himself changes the position of the projector and moves the projector to the projection surface. Must be directly facing.
図13から15はプロジェクタを投射面に正対させて画像を投射させた場合を示す図である。図13は投射面とプロジェクタを横から見た図であり、図14は上から見た図である。図15は投射画像を示す図である。超短焦点プロジェクタが投射面と正対していると、図15に示すように投射画像は、それぞれの辺が直線の長方形となる。 13 to 15 are diagrams showing a case where an image is projected with the projector facing the projection surface. FIG. 13 is a view of the projection surface and the projector as viewed from the side, and FIG. 14 is a view as viewed from above. FIG. 15 is a diagram showing a projected image. When the ultra-short focus projector faces the projection surface, the projection image becomes a rectangle with straight sides as shown in FIG.
続いて、プロジェクタが投射面と正対していない場合について説明する。図16は投射面とプロジェクタを上から見た図であり、図17は投射画像を示す図である。図17に示す投射画像では、左端は直線になっているが、上端、下端および右端は線が歪んでいる。図には画像の内容を示していないが、画像そのものも右側にいくほど歪むことになる。画像の歪みは、プロジェクタから投射面までの距離がプロジェクタの左側と右側とで異なることで起こる。図16に示す場合、その距離がプロジェクタの左側よりも右側の方が長くなっている。この距離の差が大きいほど画像の歪みが大きくなる。また、この距離の差が同じ場合、プロジェクタと正対する投射面までの距離が短いほど、画像の歪みが大きくなる。 Next, a case where the projector is not directly facing the projection surface will be described. FIG. 16 is a view of the projection surface and the projector as seen from above, and FIG. 17 is a view showing a projection image. In the projection image shown in FIG. 17, the left end is a straight line, but the upper end, the lower end, and the right end are distorted. Although the contents of the image are not shown in the figure, the image itself is distorted as it goes to the right side. Image distortion occurs when the distance from the projector to the projection surface differs between the left side and the right side of the projector. In the case shown in FIG. 16, the distance is longer on the right side than on the left side of the projector. The greater the difference in distance, the greater the image distortion. When the difference in distance is the same, the shorter the distance to the projection surface facing the projector, the greater the image distortion.
プロジェクタの左側および右側のそれぞれから投射面までの距離を同じにするには、微調整を必要とし、手動だと困難であるという問題がある。特に、投射面までの距離が短い場所で使用する場合、調整がさらに困難になるという問題がある。 In order to make the distance from the left and right sides of the projector to the projection surface the same, fine adjustment is required, and there is a problem that it is difficult if it is manual. In particular, when used in a place where the distance to the projection surface is short, there is a problem that adjustment becomes more difficult.
本発明は、上述したような問題を解決するためになされたものであり、手動で調整しなくても投射面と正対することが可能なプロジェクタ、位置調整装置および位置調整方法を提供することを目的とする。 The present invention has been made to solve the above-described problems, and provides a projector, a position adjusting device, and a position adjusting method that can face the projection surface without manual adjustment. Objective.
上記目的を達成するため、本発明の一態様によれば、
本体と台座を備えるプロジェクタにおいて、
前記本体に設けられ、投射面に画像を投射する投射機構と、
前記本体に設けられ、さらに、該投射機構を挟んで左右方向に設けられ、前記投射面までの距離をそれぞれ測定するための第1および第2の測距センサと、
前記本体を前記台座の回転軸を中心に前記左右方向に回転させる回転機構部と、
前記第1および第2の測距センサの検出内容に基づいて、前記第1および第2の測距センサから前記投射面までのそれぞれの距離である第1の距離と第2の距離を算出し、該算出された第1の距離と第2の距離との差が最小になるように前記回転機構部を制御する制御部と、を有し、前記第1の測距センサの測定方向と前記投射機構の投射軸とのなす第1の角度は前記左右方向に所定の広がり角度を持ち、前記第2の測距センサの測定方向と前記投射機構の投射軸とのなす第2の角度は、前記投射機構の投射軸に対して、前記第1の角度と前記左右方向に対称となる角度を持つ、プロジェクタが提供される。
In order to achieve the above object, according to one aspect of the present invention,
In a projector having a main body and a pedestal,
A projection mechanism provided in the main body and projecting an image on a projection surface;
A first and a second distance measuring sensors provided in the main body, further provided in the left-right direction across the projection mechanism, for measuring the distance to the projection surface;
A rotation mechanism that rotates the main body in the left-right direction around the rotation axis of the pedestal;
Based on the detection contents of the first and second distance measuring sensors, a first distance and a second distance that are distances from the first and second distance measuring sensors to the projection surface are calculated. , possess a control unit for the difference between the first and second distances issued the calculated controls the rotation mechanism so as to minimize, and the the measurement direction of the first distance measuring sensor The first angle formed by the projection axis of the projection mechanism has a predetermined spread angle in the left-right direction, and the second angle formed by the measurement direction of the second distance measuring sensor and the projection axis of the projection mechanism is: A projector is provided that has an angle that is symmetrical to the first angle and the left-right direction with respect to a projection axis of the projection mechanism .
この場合、前記第1および第2の測距センサは、前記投射機構の光軸に対称に配置されるとともにこれらを結ぶ線が底面部と平行とされることとしてもよい。 In this case, the first and second distance measuring sensors may be arranged symmetrically with respect to the optical axis of the projection mechanism and a line connecting them may be parallel to the bottom surface portion.
また、前記回転機構部は、入力される第1の制御信号により前記本体を所定のステップ角で回転させて、前記投射面への画像投射角度を変化させることにより、前記第1および第2の距離を変化させ、
前記制御部は、前記第1の制御信号を前記回転機構部に送信し、前記回転機構部が前記本体を前記ステップ角だけ回転させる度に前記第1および第2の測距センサの検出内容に基づいて前記第1の距離と前記第2の距離を算出し、これらの距離の差が最小になる回転角に前記本体を回転させることとしてもよい。
In addition, the rotation mechanism unit rotates the main body at a predetermined step angle in accordance with the input first control signal, and changes the image projection angle on the projection surface, whereby the first and second Change the distance,
The control unit transmits the first control signal to the rotation mechanism unit, and each time the rotation mechanism unit rotates the main body by the step angle, the detection contents of the first and second ranging sensors are detected. Based on this, the first distance and the second distance may be calculated, and the main body may be rotated to a rotation angle at which a difference between these distances is minimized .
また、記憶部を備え、前記制御部は、
前記回転機構部が前記本体を回転させる度に、前記回転機構部の回転角と、該回転角における前記第1および第2の距離を示すデータを前記記憶部に格納し、これらのデータに示される距離の差が最小になる回転角を前記データから検索することとしてもよい。
In addition, a storage unit, the control unit,
Each time the rotation mechanism unit rotates the main body , data indicating the rotation angle of the rotation mechanism unit and the first and second distances at the rotation angle are stored in the storage unit, and are shown in these data. The rotation angle that minimizes the difference in the distance to be detected may be retrieved from the data.
また、前記本体は、入力される第2の制御信号により前記投射機構を駆動させて画像のピントを合わせるフォーカス調整部を備え、
前記制御部は、
前記第1および第2の距離の差が最小になる回転角に前記本体を回転させた後、該回転角における前記第1の距離、または第2の距離に基づいて画像のピントを合わせる対象となる距離を算出し、該距離に基づく前記第2の制御信号を前記フォーカス調整部に送信することとしてもよい。
In addition, the main body includes a focus adjustment unit that drives the projection mechanism by an input second control signal to adjust the focus of the image,
The controller is
An object to which an image is focused based on the first distance or the second distance at the rotation angle after the main body is rotated to a rotation angle at which the difference between the first and second distances is minimized. May be calculated, and the second control signal based on the distance may be transmitted to the focus adjustment unit.
本発明の別の態様によれば、画像投射装置を搭載できる位置調整台と、前記位置調整台を回転させるための回転軸と、を備える位置調整装置において、
前記位置調整台に設けられ、さらに、前記回転軸を挟んで左右方向に設けられ、前記画像投射装置から画像が投射される投射面までの距離をそれぞれ測定するための第1および第2の測距センサと、
前記位置調整台を前記回転軸を中心に前記左右方向に回転させる回転機構部と、
前記第1および第2の測距センサの検出内容に基づいて、前記第1および第2の測距センサから前記投射面までのそれぞれの距離である第1の距離と第2の距離を算出し、該算出された第1の距離と第2の距離との差が最小になるように前記回転機構部を制御する制御部と、を有し、前記第1の測距センサの測定方向と前記画像投射装置の投射軸とのなす第1の角度は、前記左右方向に所定の広がり角度を持ち、前記第2の測距センサの測定方向と前記画像投射装置の投射軸とのなす第2の角度は、前記画像投射装置の投射軸に対して、前記第1の角度と前記左右方向に対称となる角度を持つように、前記第1および第2の測距センサが配置されている、位置調整装置が提供される。
According to another aspect of the present invention, in a position adjusting device comprising a position adjusting table on which an image projection device can be mounted, and a rotating shaft for rotating the position adjusting table,
First and second measurements are provided on the position adjustment table, and are provided in the left-right direction across the rotation axis to measure the distance from the image projection device to the projection surface on which the image is projected. A distance sensor;
A rotation mechanism that rotates the position adjustment table in the left-right direction around the rotation axis;
Based on the detection contents of the first and second distance measuring sensors, a first distance and a second distance that are distances from the first and second distance measuring sensors to the projection surface are calculated. , possess a control unit for the difference between the first and second distances issued the calculated controls the rotation mechanism so as to minimize, and the the measurement direction of the first distance measuring sensor The first angle formed by the projection axis of the image projection apparatus has a predetermined spread angle in the left-right direction, and the second angle formed by the measurement direction of the second distance measuring sensor and the projection axis of the image projection apparatus. The position at which the first and second distance measuring sensors are arranged so that the angle is symmetrical with respect to the projection axis of the image projection apparatus in the left-right direction with respect to the first angle. An adjustment device is provided.
この場合、前記第1および第2の測距センサは、前記回転軸に対称に配置されるとともにこれらを結ぶ線が前記画像投射装置の底面部と平行とされることとしてもよい。
また、前記回転機構部は、入力される第1の制御信号により前記位置調整台を所定のステップ角で回転させて、前記投射面への画像投射角度を変化させることにより、前記第1および第2の距離を変化させ、
前記制御部は、前記第1の制御信号を前記回転機構部に送信し、前記回転機構部が前記位置調整台を前記ステップ角だけ回転させる度に前記第1および第2の測距センサの検出内容に基づいて前記第1の距離と前記第2の距離を算出し、これらの距離の差が最小になる回転角に前記位置調整台を回転させることとしてもよい。
In this case, the first and second distance measuring sensors may be arranged symmetrically with respect to the rotation axis , and a line connecting them may be parallel to the bottom surface of the image projection apparatus.
In addition, the rotation mechanism unit rotates the position adjustment table at a predetermined step angle in response to the input first control signal, thereby changing the image projection angle on the projection surface, whereby the first and first Change the distance of 2,
The control unit transmits the first control signal to the rotation mechanism unit, and each time the rotation mechanism unit rotates the position adjustment table by the step angle, the detection of the first and second ranging sensors. The first distance and the second distance may be calculated based on the contents, and the position adjustment table may be rotated to a rotation angle that minimizes the difference between these distances.
また、記憶部を備え、前記制御部は、
前記回転機構部が前記位置調整台を回転させる度に、前記回転機構部の回転角と、該回転角における前記第1および第2の距離を示すデータを前記記憶部に格納し、これらのデータに示される距離の差が最小になる回転角を前記データから検索することとしてもよい。
In addition, a storage unit, the control unit,
Each time the rotation mechanism unit rotates the position adjustment table, the storage unit stores data indicating the rotation angle of the rotation mechanism unit and the first and second distances at the rotation angle. the rotational angle difference becomes a minimum distance may be retrieved from the data shown in.
本発明のさらに別の態様によれば、本体と台座を備えるプロジェクタの位置調整方法であって、
前記本体に、投射面に画像を投射する投射機構を設け、さらに、前記投射面までの距離をそれぞれ測定するための第1および第2の測距センサを、該投射機構を挟んで左右方向に設け、
前記本体を前記台座の回転軸を中心に前記左右方向に回転させる回転機構部を設け、
前記第1の測距センサの測定方向と前記投射機構の投射軸とのなす第1の角度は、前記左右方向に所定の広がり角度を持ち、前記第2の測距センサの測定方向と前記投射機構の投射軸とのなす第2の角度は、前記投射機構の投射軸に対して、前記第1の角度と前記左右方向に対称となる角度を持つように、前記第1および第2の測距センサを配置し、
前記第1および第2の測距センサの検出内容に基づいて、前記第1および第2の測距センサから前記投射面までのそれぞれの距離である第1の距離と第2の距離を算出し、該算出された第1の距離と第2の距離との差が最小になるように前記回転機構部を制御する位置調整方法が提供される。
According to still another aspect of the present invention, there is provided a projector position adjustment method including a main body and a pedestal,
The main body is provided with a projection mechanism for projecting an image on the projection surface, and further, first and second distance measuring sensors for measuring the distance to the projection surface are arranged in the left-right direction across the projection mechanism. Provided,
A rotation mechanism for rotating the main body in the left-right direction around the rotation axis of the pedestal;
The first angle formed by the measurement direction of the first distance sensor and the projection axis of the projection mechanism has a predetermined spread angle in the left-right direction, and the measurement direction of the second distance sensor and the projection The second angle formed by the projection axis of the mechanism is symmetric with respect to the projection axis of the projection mechanism in the left-right direction with respect to the first angle. Place the distance sensor,
Based on the detection contents of the first and second distance measuring sensors, a first distance and a second distance that are distances from the first and second distance measuring sensors to the projection surface are calculated. There is provided a position adjustment method for controlling the rotation mechanism so that the difference between the calculated first distance and the second distance is minimized.
この場合、前記第1および第2の測距センサは、前記投射機構の光軸に対称に配置されるとともにこれらを結ぶ線が前記プロジェクタの底面部と平行とされることとしてもよい。 In this case, the first and second distance measuring sensors may be arranged symmetrically with respect to the optical axis of the projection mechanism, and a line connecting them may be parallel to the bottom surface of the projector .
また、前記回転機構部は、入力される第1の制御信号により前記本体を所定のステップ角で回転させて、前記投射面への画像投射角度を変化させることにより、前記第1および第2の距離を変化させ、
前記第1の制御信号を前記回転機構部に送信し、前記回転機構部が前記本体を前記ステップ角だけ回転させる度に前記第1および第2の測距センサの検出内容に基づいて前記第1の距離と前記第2の距離を算出し、これらの距離の差が最小になる回転角に前記本体を回転させることとしてもよい。
In addition, the rotation mechanism unit rotates the main body at a predetermined step angle in accordance with the input first control signal, and changes the image projection angle on the projection surface, whereby the first and second Change the distance,
The first control signal is transmitted to the rotation mechanism unit, and the rotation mechanism unit rotates the main body by the step angle, based on the detection contents of the first and second ranging sensors. And the second distance may be calculated, and the main body may be rotated to a rotation angle at which the difference between these distances is minimized .
また、前記本体が回転する度に、前記回転角と、該回転角における前記第1および第2の距離を示すデータを保存し、これらのデータに示される距離の差が最小になる回転角を前記データから検索することとしてもよい。 Further, every time the body is rotated, a front Kikai rotation angle, the data indicating the first and second distance in the rotation angle stored, the rotation difference of the distances shown in these data is minimized The corner may be searched from the data.
本発明によれば、2つの測距センサを、これらを結ぶ線が底面部と平行とし(装置本体の底面部からの高さを同じとする)、各測距センサを投射画像の光軸に対して対称となる位置に設けた場合、水平方向を上端または下端とする一般的な画像投射が行われているときには、各測距センサ12、13の投射面側における測定位置を結ぶ線は投射画像の上端や下端と平行となる。また、測距値がほぼ等しいと見なされる所定範囲内の投射画像は、歪みが小さく、水平方向に関して正対しているときの投射画像とほぼ同じ形になる。
According to the present invention, two distance measuring sensors are arranged such that the line connecting them is parallel to the bottom surface (the height from the bottom surface of the apparatus main body is the same), and each distance measuring sensor is placed on the optical axis of the projected image. When provided at a position that is symmetrical with respect to the horizontal direction, when general image projection is performed with the horizontal direction as the upper end or the lower end, a line connecting the measurement positions on the projection surface side of the
本発明では、投射機構の光軸に対称に配置された2つの測距センサから投射面までのそれぞれの距離が同じになる位置に投射機構を回転させるため、手動で調整しなくてもプロジェクタを投射面と正対させることが可能である。また、手動では困難であった、プロジェクタの左側および右側の両方を投射面と同じ距離にするための微調整がプロジェクタ自身で行われるため、操作者の労力が軽減する。 In the present invention, since the projection mechanism is rotated to a position where the distances from the two distance measuring sensors arranged symmetrically with respect to the optical axis of the projection mechanism to the projection surface are the same, the projector is not adjusted manually. It is possible to face the projection surface. Further, since the projector itself performs fine adjustment to make both the left side and the right side of the projector the same distance as the projection surface, which is difficult manually, the labor of the operator is reduced.
本発明のプロジェクタは、投射面までの距離を測定するための2つの測距センサと、測定された距離の差が所定の範囲内の位置に投射機構を回転させる回転機構とを設けたことを特徴とする。 The projector of the present invention includes two distance measuring sensors for measuring the distance to the projection surface, and a rotation mechanism for rotating the projection mechanism to a position where the difference between the measured distances is within a predetermined range. Features.
本実施例のプロジェクタの構成を説明する。 The configuration of the projector of this embodiment will be described.
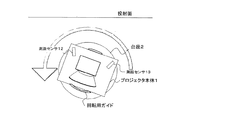
図1は、本実施例のプロジェクタの一構成例を示すブロック図である。 FIG. 1 is a block diagram illustrating a configuration example of a projector according to the present embodiment.
図1に示すように、本実施例のプロジェクタは、プロジェクタ本体1とプロジェクタ本体1を垂直軸を中心にプロジェクタ本体1を回転させるための台座2とを有する構成である。
As shown in FIG. 1, the projector according to the present embodiment has a configuration including a projector main body 1 and a
プロジェクタ本体1は、プロジェクタ本体1を動作させるための複数のボタンが設けられた操作部11と、投射面までの距離を測定するための測距センタ12、13と、プロジェクタ本体1が回転した角度および測距センサ12、13のそれぞれの検出内容に基づいて算出される距離のデータを格納するための記憶部14と、プロジェクタ本体1を回転させる動作およびフォーカス動作を制御する制御部15と、ミラー投射方式で投射する投射機構21と、制御部15からの制御信号に応じて投射機構21を動かしてフォーカス位置を調整するフォーカス調整部22と、垂直軸を中心にプロジェクタ本体1を回転させるための回転機構部とを有する。
The projector main body 1 includes an
回転機構部は、制御部15との間でプロジェクタ本体1の回転角度に関する信号を送受信し、プロジェクタ本体1の回転角度を調整するモータ制御部18と、モータ制御部18の制御に応じて回転するモータ19と、モータ19の回転数に応じて台座2上を回転しながら円運動する歯車20とを有する。
The rotation mechanism unit transmits and receives a signal related to the rotation angle of the projector main body 1 to and from the control unit 15, and rotates according to the control of the
操作部11に設けられた複数のボタンの中には、投射面と正対する機能を動作させるための正対調整ボタンが含まれる。
The plurality of buttons provided on the
測距センサ12および測距センサ13について説明する。
The
図1に示すように、プロジェクタ本体1から投射面に向かって、左側に測距センサ12が設けられ、右側に測距センサ13が設けられている。測距センサ12、13は、配置されている位置が異なるだけでその構成および動作は同じである。図2は、測距センサ12、13の一例を示す模式図である。
As shown in FIG. 1, a
図2に示すように測距センサ12、13は、発光デバイス201と、受像デバイス202とを有する。発光デバイス201は、LED(Light Emitting Diode)またはレーザを発光素子とする構成である。一方、受像デバイス202は、撮像素子であるCCD(Charge Coupled Device)イメージセンサおよびCMOS(Complementary Metal Oxide Semiconductor)イメージセンサ、ならびに位置検出素子であるPSD(Position Sensitive Detector)のうちいずれか一つの素子を含む構成である。
As shown in FIG. 2, the
測距センサ12、13の動作を説明する。制御部15が発光デバイス201を発光させると、発光デバイス201から出力された光が投射面で反射され、受像デバイス202に検出される。このとき、投射面との距離に応じて、受像デバイス202の受光する位置が異なる。図2に示すように投射面205の場合、受光ポイント203に検出される。一方、投射面206の場合、受光ポイント204に検出される。また、受像デバイス202は、受光したポイントに対応して出力電圧が決定される。そして、その出力電圧を示す電気信号を制御部15に送信する。受像デバイス202の受光した位置に応じて出力電圧が決まる特性を利用して、測距センサ12、13から出力される電気信号に基づいて、プロジェクタから投射面までの距離を測定することが可能となる。
The operation of the
続いて、測距センサ12、13の配置条件について説明する。
Subsequently, the arrangement conditions of the
図3は、測距センサ12、13のそれぞれを配置する位置を示した模式図である。なお、投射光301の投射光軸302に対する水平方向への広がりの角度θ0は、予め光学的に設計され、決められている。測距センサ12と測距センサ13とは、図3に示すように、投射光軸302に対して左右対称となるように配置されている。さらに、測距センサ12の発光デバイスから出力される発光路303および測距センサ13の発光デバイスから出力される発光路304のそれぞれの投射光軸302に対する角度が角度θ0になるように、測距センサ12、13が配置されている。
FIG. 3 is a schematic diagram showing positions where the
測距センサ12、13が投射面までの距離を測定する際の投射面側の位置について説明する。
The position on the projection surface side when the
図4は、測距センサ12、13それぞれが距離を測定する際の投射面側の位置を示したものである。図4に示すように、投射画像401は、左端および右端を鉛直方向に平行かつ同じ長さで、上端および下端を水平方向にかつ同じ長さの長方形になる場合とする。この場合、測距センサ12の測定位置のポイント402は、投射画像401の左辺と右辺のそれぞれの中点を通る中心線405上で、かつ投射画像401の左側で、かつ投射画像401の外側になる。一方、測距センサ13の測定位置のポイント403は、中心線405上で、かつ投射画像401の右側で、かつ投射画像401の外側になる。これにより、測距センサ12、13の測距値が同じとき、プロジェクタ本体1は投射面と正対する。また、測距値がほぼ等しいと見なせる所定範囲内の投射画像は、歪みが小さく、正対しているときの投射画像とほぼ同じ形になる。
FIG. 4 shows the position on the projection surface side when the
なお、投射画像の鉛直方向および水平方向のサイズは、予め光学的に設計され、決められている。 Note that the vertical and horizontal sizes of the projected image are optically designed and determined in advance.
制御部15は、プログラムにしたがって所定の処理を行うCPU(Central Processing Unit)16と、プログラムを格納するためのメモリ17とを有する。
The control unit 15 includes a CPU (Central Processing Unit) 16 that performs predetermined processing according to a program, and a
CPU16は操作部11の正対調整ボタンが押されると、測距センサ12、13のそれぞれの発光デバイスを発光させる。そして、測距センサ12、13のそれぞれの受像デバイスの検出内容に基づいて測距センサ12、13のそれぞれの投射面までの距離を算出する。そして、算出した距離とその距離に対応するプロジェクタ本体1が回転する角度である回転角とを記憶部14に格納する。このとき、回転角は本実施例のプロジェクタが最初に設置された場所における投射光軸の投射面方向の角度を0度とし、0度に対して左回りの角を負の角度とし、右回り(時計回り)の角度を正の角度とする。
When the facing adjustment button of the
また、回転角の測定範囲である測定範囲角および測定範囲角内で測距センサ12、13が段階的に測距する所定の角度であるステップ角は、予め設定されている。ステップ角は、10度未満で任意の値に設定する。ステップ角が小さいほど、距離のデータを多く取得できるが、測定が終了するまでの時間が長くなる。
In addition, a measurement range angle that is a measurement range of the rotation angle and a step angle that is a predetermined angle that the
続いてCPU16は、回転角を示す制御信号をモータ制御部18に送信する。その後、モータ制御部18からプロジェクタ本体1を指定された回転角に回転させたことを示す信号を受信すると、再び測距センサ12、13のそれぞれの発光デバイスを発光させる。測距が終了すると、測距センサ12、13の投射面までのそれぞれの距離が同じになる、または、ほぼ等しいと見なされる所定範囲内の角度を記憶部14の中から検索する。そして、プロジェクタ本体1がその角度に回転するようにモータ制御部18に制御信号を送信する。
Subsequently, the
記憶部14には、測距センサ12、13の検出内容に基づいて算出されるそれぞれの距離のデータと、これらの距離が測定されたときの回転角のデータが格納される。
The
また、CPU16は、プロジェクタ本体1が測距センサ12、13の投射面までのそれぞれの距離が同じ、またはほぼ等しいとみなせる所定範囲内の位置になる角度に回転すると、フォーカスの対象となる距離を算出し、その距離に基づく制御信号をフォーカス調整部22へ送信する。
In addition, when the projector body 1 is rotated to an angle at which the projector body 1 is positioned within a predetermined range in which the distances to the projection surfaces of the
投射機構21は、従来の短焦点プロジェクタと同様に図12に示したDMD100と、ミラー101〜104とを有する。DMD100から順に光線を反射し、画像を拡大し、最終的にミラー104が投射面に投射する。また、本実施例では、ミラー103は、光軸に対して前後に移動可能な機構を有する。この機構を用いて、ミラー104から投射される投射画像のフォーカス位置を調整する。
The
フォーカス調整部22は、ミラー103の移動を行うためのモータ(不図示)を有し、CPU16からの制御信号に応じてモータを駆動する。
The
なお、投射機構21は、一般的な投射レンズを用いてもよい。この場合、フォーカス調整部22は、投射レンズ内のフォーカスレンズを移動させるためのモータを有し、CPU16からの制御信号に応じてモータを駆動する。
The
図5は、プロジェクタ本体1と台座2との接続の一例を示す模式図である。また図6は、プロジェクタ本体1の回転動作を説明するための模式図である。
FIG. 5 is a schematic diagram illustrating an example of connection between the projector main body 1 and the
台座2は、図5に示すように、その中心と垂直軸を介してプロジェクタ本体1と接続されている。また、図6に示すように、歯車20の回転経路になる回転用ガイドが、台座2の上部に垂直軸を中心とする円形で設けられている。垂直軸は、台座2およびプロジェクタ本体1それぞれの中心に位置し、プロジェクタ本体1が回転するときの回転軸となる。なお、回転方向は、図6に左回りで示しているが、右回りでもよい。
As shown in FIG. 5, the
次に、本実施例のプロジェクタの動作について説明する。 Next, the operation of the projector of this embodiment will be described.
図7は、本実施例のプロジェクタの動作手順を示すフローチャートである。ここでは、測定範囲角を−40度と+40度との間にする。 FIG. 7 is a flowchart showing an operation procedure of the projector according to the present embodiment. Here, the measurement range angle is between −40 degrees and +40 degrees.
本実施形態のプロジェクタが任意の台上に配置され、操作部11の正対調整ボタンが押されると、CPU16は、回転角度が初期状態の0度において投射面までの距離を測定するために、測距センサ12および測距センサ13のそれぞれの発光デバイスを発光させる。そして、測距センサ12および測距センサ13それぞれの受像デバイスから検出した内容に基づき投射面までの距離をそれぞれ算出する(ステップ1001)。投射面側の測定する位置は、図3で説明したように、投射画像に対して予め設定されており、測距センサ12はポイント402を測定し、測距センサ13はポイント403を測定する。
When the projector according to the present embodiment is placed on an arbitrary table and the facing adjustment button of the
2つのセンサのそれぞれの投射面までの距離を算出すると、プロジェクタ本体1の回転角およびその回転角における測距センサ12、13のそれぞれの投射面までの距離を示すデータを記憶部14に格納する(ステップ1002)。
When the distances to the respective projection surfaces of the two sensors are calculated, data indicating the rotation angle of the projector body 1 and the distances to the respective projection surfaces of the
CPU16は、所定のステップ角でプロジェクタ本体1を回転させるようにモータ制御部18に制御信号を送信する。モータ制御部18は、制御信号に応じてモータ19の動作制御を行う。モータ19が回転すると、歯車20が台座2の回転用ガイド上を移動し、プロジェクタ本体1は所定のステップ角だけ回転する。
The
ステップ1001およびステップ1002の動作を、測定範囲角でプロジェクタ本体1を所定のステップ角だけ回転させるたびに行う(ステップ1003)。上記測定範囲角において距離の測定が全て終了すると、ステップ1004に進む。
図8は、ステップ1003で測定が全て終了したときに記憶部に格納されたデータをグラフ化したものである。図8に示すように、横軸をプロジェクタ本体1の回転角とし、縦軸を測距センサ12、13の投射面までのそれぞれの距離とする。縦軸の距離は、横軸との接点に近いほど大きい値となり、反対に接点から離れるほど小さい値となる。CPU16は、測距が終了すると、図8に示す測距センサ12、13の投射面までのそれぞれの距離が同じになる正対ポイント801、またはほぼ等しいと見なされる所定範囲内の位置を検索して特定する(ステップ1004)。なお、ここでは測定範囲角を−40度から40度までに限定しているが、−180度から180度までの範囲で任意に設定できるものとする。
FIG. 8 is a graph of the data stored in the storage unit when all the measurements are completed in
位置が特定されると、回転機構部がプロジェクタ本体1をその位置に回転させる(ステップ1005)。なお、ステップ1004の動作は、プロジェクタ本体1がステップ角に回転するたびに行ってもよい。この場合、回転の途中で正対ポイント801になれば直ちにステップ1005に進み、測定範囲角における全てのステップ角について測距する必要がなく、プロジェクタを投射面に正対させるのにかかる時間を短縮できる。
When the position is specified, the rotation mechanism unit rotates the projector body 1 to that position (step 1005). The operation of
プロジェクタ本体1はステップ1005の位置に回転すると、オートフォーカス動作を実施する(ステップ1006)。
When the projector body 1 rotates to the position of
次に、フォーカス調整の動作について説明する。ここでは、プロジェクタ本体1は、正対ポイント801の回転角に位置している場合とする。 Next, the focus adjustment operation will be described. Here, it is assumed that the projector body 1 is located at the rotation angle of the directly facing point 801.
図9はフォーカス動作を説明するための図である。図9に示すように、正対ポイント801における測距センサ12または測距センサ13から投射面までの距離は、投射機構21の光軸に対し角度θ0傾いており、角度θ0を有する直角三角形の斜辺の長さがその距離に相当する。この距離は、測距センサ12、13の検出内容に基づいて算出された距離であることから、以下では、測定距離と称する。
FIG. 9 is a diagram for explaining the focus operation. As shown in FIG. 9, the distance from the
図9に示すように、プロジェクタ本体1を投射面に正対ポイント801に回転させたときのプロジェクタ本体1から投射面までの距離を、投射面の画像のピントを合わせるためのフォーカス調整対象距離とする。フォーカス調整対象距離は、ステップ1003の検索により特定した正対ポイント801における測定距離と、角度θ0をとを用いて以下の式で算出される。
As shown in FIG. 9, the distance from the projector main body 1 to the projection plane when the projector main body 1 is rotated to the point 801 facing the projection plane is the focus adjustment target distance for focusing the image on the projection plane. To do. The focus adjustment target distance is calculated by the following expression using the measurement distance at the directly facing point 801 identified by the search in
フォーカス調整対象距離=測定距離×Cosθ0・・・・・(1)
Cosθ0の値は、CPU16が実行するためのプログラムに予め定数として記述されている。また、そのプログラムには、フォーカス調整対象距離の任意の値に対して投射面の画像のピントを合わせるために、フォーカス調整対象距離に対応してミラー103の位置を算出するための式が記述されている。
Focus adjustment target distance = measurement distance x Cosθ 0 (1)
The value of Cosθ 0 is described as a constant in advance in a program to be executed by the
制御部15は、プロジェクタ本体1が投射面に正対すると、上式(1)からフォーカス調整対象距離を算出する。続いて、算出したフォーカス調整対象距離からミラー103の最適な位置の情報を求め、ミラー103の位置の情報を含む制御信号をフォーカス調整部22に送信する。フォーカス調整部22は、ミラー103の位置の情報を含む制御信号を制御部15から受信すると、制御信号に応じてミラー103を移動させるためのモータ(不図示)を駆動させる。ミラー103は光軸に対して前または後に移動する。これにより、投射面の画像のピントが合うように調整される。
When the projector body 1 faces the projection surface, the control unit 15 calculates the focus adjustment target distance from the above equation (1). Subsequently, information on the optimal position of the mirror 103 is obtained from the calculated focus adjustment target distance, and a control signal including information on the position of the mirror 103 is transmitted to the
なお、プロジェクタ本体1の位置が正対ポイント801でないが、測距センサ12および測距センサ13のそれぞれの投射面までの距離がほぼ等しいと見なせる所定範囲内にある場合、上式(1)の測定距離は、その位置におけるどちらか一方から投射面までの距離としてもよい。
If the position of the projector main body 1 is not the directly facing point 801 but the distances to the projection surfaces of the
なお、本実施例のプロジェクタでは、制御部15、操作部11および記憶部14などを含むプロジェクタ本体1を回転させたが、投射機構21、測距センサ12、13およびフォーカス調整部22を含む構成を画像投射部とし、少なくとも画像投射部を回転機構部で回転させるようにしてもよい。制御部15、操作部11および記憶部14を回転させなくてもよい。
In the projector of this embodiment, the projector main body 1 including the control unit 15, the
本実施例のプロジェクタは、上述したように、プロジェクタ本体1を測定範囲角において所定のステップ角で回転させて、2つの測距センサの投射面までのそれぞれの距離が同じになる、または、ほぼ等しいと見なされる所定範囲内の位置を検索し、該当する位置を特定する。距離が同じになる場合、その位置まで画像投射部を回転させることで、プロジェクタが投射面と正対する。その結果、プロジェクタを投射面と正対させる調整を手動で行う必要がなくなる。 As described above, the projector according to the present embodiment rotates the projector main body 1 at a predetermined step angle in the measurement range angle so that the distances to the projection surfaces of the two distance measuring sensors are the same or almost the same. A position within a predetermined range that is considered to be equal is searched to identify the corresponding position. When the distances are the same, the projector faces the projection surface by rotating the image projection unit to that position. As a result, there is no need to manually adjust the projector to face the projection surface.
また、手動では困難であった、プロジェクタの左側および右側の両方を投射面と同じ距離にするための微調整がプロジェクタ自身で行われるため、操作者の労力が軽減する。特に、超短焦点プロジェクタのように、投射面との距離が短い場合、調整がさらに困難になるが、操作者自身が微調整を行う必要がない。 Further, since the projector itself performs fine adjustment to make both the left side and the right side of the projector the same distance as the projection surface, which is difficult manually, the labor of the operator is reduced. In particular, when the distance from the projection surface is short like an ultra-short focus projector, the adjustment becomes more difficult, but the operator does not need to make a fine adjustment.
また、プロジェクタが投射面と正対すると、投射画像までの最短距離を算出し、その距離に基づく投射画像のピント調整を行うことが可能となる。 Further, when the projector faces the projection surface, it is possible to calculate the shortest distance to the projection image and adjust the focus of the projection image based on the distance.
本実施例は、従来のプロジェクタを、人の手を介さずに投射面に対して正対させる位置調整装置に関するものであり、実施例1で説明したプロジェクタから投射機構21およびフォーカス調整部22を取り除いて投射面と正対する調整を行う装置である。
The present embodiment relates to a position adjustment device that causes a conventional projector to face the projection surface without a human hand. The
図10は、本実施例の位置調整装置の一構成例を示すブロック図である。実施例1のプロジェクタと同様な構成については、同一の記号を付し、その詳細な説明を省略する。 FIG. 10 is a block diagram showing an example of the configuration of the position adjustment apparatus of the present embodiment. The same components as those in the projector according to the first embodiment are denoted by the same reference numerals, and detailed description thereof is omitted.
本実施例の位置調整装置は、装置本体110と、装置本体110を垂直軸を中心に回転させるための台座2とを有する構成である。図10に示すように、装置本体110は、操作部11、測距センサ12、測距センサ13、記憶部14、制御部15、モータ制御部18、モータ19および歯車20を有する。
The position adjusting device of the present embodiment is configured to include a device main body 110 and a
本実施例では、測距センサ12、13は、装置本体110の底面部からの高さが同じとされている。これにより、水平方向を上端または下端とする一般的な画像投射が行われているときには、各測距センサ12、13の投射面側における測定位置を結ぶ線は投射画像の上端や下端と平行となり、2つの測距センサの測距値が同じ位置ではプロジェクタが投射面と正対することになる。また、測距値がほぼ等しいと見なされる所定範囲内の投射画像は、歪みが小さく正対しているときの投射画像とほぼ同じ形になる。
In the present embodiment, the
次に、本実施例の位置調整装置の動作について説明する。ここでは、装置本体110の上に従来のプロジェクタを設置した場合とする。 Next, the operation of the position adjustment apparatus of this embodiment will be described. Here, it is assumed that a conventional projector is installed on the apparatus main body 110.
図11は、従来のプロジェクタを装置本体110の上に設置したことを示す模式図である。装置本体110の上にプロジェクタが設置されると、装置本体110は、図7に示したステップ1001からステップ1005までの動作を実行する。
FIG. 11 is a schematic diagram showing that a conventional projector is installed on the apparatus main body 110. When the projector is installed on the apparatus main body 110, the apparatus main body 110 executes the operations from
本実施例の位置調整装置は、操作者自らが調整しなくても従来のプロジェクタを投射面と正対させることが可能となる。また、プロジェクタに限らず、例えば、映写機を装置本体110の上に設置すれば、操作者が調整しなくても、映写機を投射面に対して正対させることが可能となる。 The position adjustment apparatus of the present embodiment can make a conventional projector face the projection surface without adjustment by the operator himself. For example, if a projector is installed on the apparatus main body 110, the projector can be directly opposed to the projection surface without adjustment by the operator.
なお、実施例2において、回転させる部分を装置本体110とはせず、プロジェクタや映写機を搭載するための位置調整台だけにしてもよい。 In the second embodiment, the rotating part may not be the apparatus main body 110, but only the position adjustment base for mounting a projector or a projector.
また、実施例2において、歯車20は、その周縁に歯を設ける代わりにタイヤのようなゴム製の輪を用いてもよい。この場合、回転経路を装置110に設けて、装置の設置面が平坦で、ゴムが滑らない充分な摩擦係数を有していれば、台座2は不要となる。実施例1についても、同様に、歯車20の代わりにゴム製の輪を用いてもよい。
In the second embodiment, the
なお、以上説明した実施例においては、底面部が水平方向とされ、2つの測距センサを、これらを結ぶ線が底面部と平行とし(装置本体の底面部からの高さを同じとする)、各測距センサを投射画像の光軸に対して対称となる位置に設けた場合について説明したが、このような条件を満たさない形状の場合であっても、プロジェクタの形状の条件を加味することで、本発明を実施することは当然可能であり、上記の条件は特に限定されるものではない。 In the embodiment described above, the bottom surface portion is in the horizontal direction, and the two distance measuring sensors have a line connecting them parallel to the bottom surface portion (the height from the bottom surface portion of the apparatus main body is the same). The case where each distance measuring sensor is provided at a position that is symmetric with respect to the optical axis of the projected image has been described. However, even if the shape does not satisfy such a condition, the condition of the projector shape is taken into account. Thus, it is naturally possible to carry out the present invention, and the above conditions are not particularly limited.
1 プロジェクタ本体
2 台座
11 操作部
12、13 測距センサ
14 記憶部
15 制御部
18 モータ制御部
21 投射機構
22 フォーカス調整部
201発光デバイス
202受像デバイス
DESCRIPTION OF SYMBOLS 1
Claims (13)
前記本体に設けられ、投射面に画像を投射する投射機構と、
前記本体に設けられ、さらに、該投射機構を挟んで左右方向に設けられ、前記投射面までの距離をそれぞれ測定するための第1および第2の測距センサと、
前記本体を前記台座の回転軸を中心に前記左右方向に回転させる回転機構部と、
前記第1および第2の測距センサの検出内容に基づいて、前記第1および第2の測距センサから前記投射面までのそれぞれの距離である第1の距離と第2の距離を算出し、該算出された第1の距離と第2の距離との差が最小になるように前記回転機構部を制御する制御部と、を有し、
前記第1の測距センサの測定方向と前記投射機構の投射軸とのなす第1の角度は前記左右方向に所定の広がり角度を持ち、前記第2の測距センサの測定方向と前記投射機構の投射軸とのなす第2の角度は、前記投射機構の投射軸に対して、前記第1の角度と前記左右方向に対称となる角度を持つ、プロジェクタ。 In a projector having a main body and a pedestal,
A projection mechanism provided in the main body and projecting an image on a projection surface;
A first and a second distance measuring sensors provided in the main body, further provided in the left-right direction across the projection mechanism, for measuring the distance to the projection surface;
A rotation mechanism that rotates the main body in the left-right direction around the rotation axis of the pedestal;
Based on the detection contents of the first and second distance measuring sensors, a first distance and a second distance that are distances from the first and second distance measuring sensors to the projection surface are calculated. , possess a control unit for the difference between the first and second distances issued the calculated controls the rotation mechanism so as to minimize, and
The first angle formed by the measurement direction of the first distance measurement sensor and the projection axis of the projection mechanism has a predetermined spread angle in the left-right direction, and the measurement direction of the second distance measurement sensor and the projection mechanism The second angle formed by the projection axis of the projector is symmetric with respect to the projection angle of the projection mechanism in the left-right direction with respect to the first angle .
前記第1および第2の測距センサは、前記投射機構の光軸に対称に配置されるとともにこれらを結ぶ線が底面部と平行とされることを特徴とするプロジェクタ。 The projector according to claim 1, wherein
The projector according to claim 1, wherein the first and second ranging sensors are arranged symmetrically with respect to the optical axis of the projection mechanism, and a line connecting them is parallel to the bottom surface.
前記回転機構部は、入力される第1の制御信号により前記本体を所定のステップ角で回転させて、前記投射面への画像投射角度を変化させることにより、前記第1および第2の距離を変化させ、
前記制御部は、前記第1の制御信号を前記回転機構部に送信し、前記回転機構部が前記本体を前記ステップ角だけ回転させる度に前記第1および第2の測距センサの検出内容に基づいて前記第1の距離と前記第2の距離を算出し、これらの距離の差が最小になる回転角に前記本体を回転させることを特徴とするプロジェクタ。 The projector according to claim 1 or 2,
The rotation mechanism unit rotates the main body at a predetermined step angle in response to an input first control signal, and changes the image projection angle on the projection surface, thereby changing the first and second distances. Change
The control unit transmits the first control signal to the rotation mechanism unit, and each time the rotation mechanism unit rotates the main body by the step angle, the detection contents of the first and second ranging sensors are detected. The projector calculates the first distance and the second distance based on the rotation distance, and rotates the main body at a rotation angle at which a difference between these distances is minimized.
記憶部を備え、前記制御部は、
前記回転機構部が前記本体を回転させる度に、前記回転機構部の回転角と、該回転角における前記第1および第2の距離を示すデータを前記記憶部に格納し、これらのデータに示される距離の差が最小になる回転角を前記データから検索することを特徴とするプロジェクタ。 The projector according to any one of claims 1 to 3,
A storage unit, and the control unit includes:
Each time the rotation mechanism unit rotates the main body, data indicating the rotation angle of the rotation mechanism unit and the first and second distances at the rotation angle are stored in the storage unit, and are shown in these data. A projector that searches for a rotation angle that minimizes a difference in distance from the data.
前記本体は、入力される第2の制御信号により前記投射機構を駆動させて画像のピントを合わせるフォーカス調整部を備え、
前記制御部は、
前記第1および第2の距離の差が最小になる回転角に前記本体を回転させた後、該回転角における前記第1の距離、または第2の距離に基づいて画像のピントを合わせる対象となる距離を算出し、該距離に基づく前記第2の制御信号を前記フォーカス調整部に送信することを特徴とするプロジェクタ。 The projector according to any one of claims 1 to 4,
The main body includes a focus adjustment unit that drives the projection mechanism according to an input second control signal to focus an image,
The controller is
An object to which an image is focused based on the first distance or the second distance at the rotation angle after the main body is rotated to a rotation angle at which the difference between the first and second distances is minimized. And a second control signal based on the distance is transmitted to the focus adjustment unit.
前記位置調整台に設けられ、さらに、前記回転軸を挟んで左右方向に設けられ、前記画像投射装置から画像が投射される投射面までの距離をそれぞれ測定するための第1および第2の測距センサと、
前記位置調整台を前記回転軸を中心に前記左右方向に回転させる回転機構部と、
前記第1および第2の測距センサの検出内容に基づいて、前記第1および第2の測距センサから前記投射面までのそれぞれの距離である第1の距離と第2の距離を算出し、該算出された第1の距離と第2の距離との差が最小になるように前記回転機構部を制御する制御部と、を有し、
前記第1の測距センサの測定方向と前記画像投射装置の投射軸とのなす第1の角度は、前記左右方向に所定の広がり角度を持ち、前記第2の測距センサの測定方向と前記画像投射装置の投射軸とのなす第2の角度は、前記画像投射装置の投射軸に対して、前記第1の角度と前記左右方向に対称となる角度を持つように、前記第1および第2の測距センサが配置されている、位置調整装置。 In a position adjustment device comprising a position adjustment table on which an image projection device can be mounted, and a rotation shaft for rotating the position adjustment table,
First and second measurements are provided on the position adjustment table, and are provided in the left-right direction across the rotation axis to measure the distance from the image projection device to the projection surface on which the image is projected. A distance sensor;
A rotation mechanism that rotates the position adjustment table in the left-right direction around the rotation axis;
Based on the detection contents of the first and second distance measuring sensors, a first distance and a second distance that are distances from the first and second distance measuring sensors to the projection surface are calculated. , possess a control unit for the difference between the first and second distances issued the calculated controls the rotation mechanism so as to minimize, and
The first angle formed by the measurement direction of the first distance measurement sensor and the projection axis of the image projection device has a predetermined spread angle in the left-right direction, and the measurement direction of the second distance measurement sensor and the The first angle and the second angle formed by the projection axis of the image projection apparatus are symmetric with respect to the projection axis of the image projection apparatus. A position adjusting device in which two distance measuring sensors are arranged .
前記第1および第2の測距センサは、前記回転軸に対称に配置されるとともにこれらを結ぶ線が前記画像投射装置の底面部と平行とされることを特徴とする位置調整装置。 The position adjusting device according to claim 6, wherein
The first and second distance measuring sensors are arranged symmetrically with respect to the rotation axis, and a line connecting them is parallel to the bottom surface of the image projection apparatus.
前記回転機構部は、入力される第1の制御信号により前記位置調整台を所定のステップ角で回転させて、前記投射面への画像投射角度を変化させることにより、前記第1および第2の距離を変化させ、
前記制御部は、前記第1の制御信号を前記回転機構部に送信し、前記回転機構部が前記位置調整台を前記ステップ角だけ回転させる度に前記第1および第2の測距センサの検出内容に基づいて前記第1の距離と前記第2の距離を算出し、これらの距離の差が最小になる回転角に前記位置調整台を回転させることを特徴とする位置調整装置。 The position adjusting device according to claim 6 or 7,
The rotation mechanism unit rotates the position adjusting table at a predetermined step angle in accordance with the input first control signal, and changes the image projection angle onto the projection surface, whereby the first and second Change the distance,
The control unit transmits the first control signal to the rotation mechanism unit, and each time the rotation mechanism unit rotates the position adjustment table by the step angle, the detection of the first and second ranging sensors. A position adjustment device that calculates the first distance and the second distance based on content and rotates the position adjustment table to a rotation angle at which a difference between these distances is minimized.
記憶部を備え、前記制御部は、
前記回転機構部が前記位置調整台を回転させる度に、前記回転機構部の回転角と、該回転角における前記第1および第2の距離を示すデータを前記記憶部に格納し、これらのデータに示される距離の差が最小になる回転角を前記データから検索することを特徴とする位置調整装置。 The position adjusting device according to any one of claims 6 to 8,
A storage unit, and the control unit includes:
Each time the rotation mechanism unit rotates the position adjustment table, the storage unit stores data indicating the rotation angle of the rotation mechanism unit and the first and second distances at the rotation angle. A position adjustment device that searches the data for a rotation angle that minimizes the difference in distance shown in FIG.
前記本体に、投射面に画像を投射する投射機構を設け、さらに、前記投射面までの距離をそれぞれ測定するための第1および第2の測距センサを、該投射機構を挟んで左右方向に設け、
前記本体を前記台座の回転軸を中心に前記左右方向に回転させる回転機構部を設け、
前記第1の測距センサの測定方向と前記投射機構の投射軸とのなす第1の角度は、前記左右方向に所定の広がり角度を持ち、前記第2の測距センサの測定方向と前記投射機構の投射軸とのなす第2の角度は、前記投射機構の投射軸に対して、前記第1の角度と前記左右方向に対称となる角度を持つように、前記第1および第2の測距センサを配置し、
前記第1および第2の測距センサの検出内容に基づいて、前記第1および第2の測距センサから前記投射面までのそれぞれの距離である第1の距離と第2の距離を算出し、該算出された第1の距離と第2の距離との差が最小になるように前記回転機構部を制御する位置調整方法。 A method for adjusting a position of a projector including a main body and a pedestal,
The main body is provided with a projection mechanism for projecting an image on the projection surface, and further, first and second distance measuring sensors for measuring the distance to the projection surface are arranged in the left-right direction across the projection mechanism. Provided,
A rotation mechanism for rotating the main body in the left-right direction around the rotation axis of the pedestal;
The first angle formed by the measurement direction of the first distance sensor and the projection axis of the projection mechanism has a predetermined spread angle in the left-right direction, and the measurement direction of the second distance sensor and the projection The second angle formed by the projection axis of the mechanism is symmetric with respect to the projection axis of the projection mechanism in the left-right direction with respect to the first angle. Place the distance sensor,
Based on the detection contents of the first and second distance measuring sensors, a first distance and a second distance that are distances from the first and second distance measuring sensors to the projection surface are calculated. A position adjustment method for controlling the rotation mechanism so that a difference between the calculated first distance and the second distance is minimized.
前記第1および第2の測距センサは、前記投射機構の光軸に対称に配置されるとともにこれらを結ぶ線が前記プロジェクタの底面部と平行とされることを特徴とする位置調整方法。 The position adjustment method according to claim 10,
The position adjusting method, wherein the first and second distance measuring sensors are arranged symmetrically with respect to the optical axis of the projection mechanism, and a line connecting them is parallel to the bottom surface of the projector.
前記回転機構部は、入力される第1の制御信号により前記本体を所定のステップ角で回転させて、前記投射面への画像投射角度を変化させることにより、前記第1および第2の距離を変化させ、
前記第1の制御信号を前記回転機構部に送信し、前記回転機構部が前記本体を前記ステップ角だけ回転させる度に前記第1および第2の測距センサの検出内容に基づいて前記第1の距離と前記第2の距離を算出し、これらの距離の差が最小になる回転角に前記本体を回転させることを特徴とする位置調整方法。 The position adjustment method according to claim 10 or 11,
The rotation mechanism unit rotates the main body at a predetermined step angle in response to an input first control signal, and changes the image projection angle on the projection surface, thereby changing the first and second distances. Change
The first control signal is transmitted to the rotation mechanism unit, and the rotation mechanism unit rotates the main body by the step angle, based on the detection contents of the first and second ranging sensors. And the second distance, and the main body is rotated to a rotation angle at which the difference between these distances is minimized.
前記本体が回転する度に、前記回転角と、該回転角における前記第1および第2の距離を示すデータを保存し、これらのデータに示される距離の差が最小になる回転角を前記データから検索することを特徴とする位置調整方法。 The position adjustment method according to any one of claims 10 to 12,
Each time the main body rotates, the rotation angle and data indicating the first and second distances at the rotation angle are stored, and the rotation angle at which the difference between the distances indicated by these data is minimized is stored in the data. The position adjustment method characterized by searching from.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006208162A JP5192669B2 (en) | 2006-07-31 | 2006-07-31 | Projector, position adjusting device, and position adjusting method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006208162A JP5192669B2 (en) | 2006-07-31 | 2006-07-31 | Projector, position adjusting device, and position adjusting method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008033116A JP2008033116A (en) | 2008-02-14 |
| JP5192669B2 true JP5192669B2 (en) | 2013-05-08 |
Family
ID=39122593
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006208162A Expired - Fee Related JP5192669B2 (en) | 2006-07-31 | 2006-07-31 | Projector, position adjusting device, and position adjusting method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5192669B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101801654B1 (en) * | 2016-07-05 | 2017-11-27 | 주식회사 글로벌샘 | Advertisement apparatus for subway train |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010243921A (en) * | 2009-04-08 | 2010-10-28 | Sanyo Electric Co Ltd | Projection video display apparatus |
| WO2012085990A1 (en) * | 2010-12-20 | 2012-06-28 | Necディスプレイソリューションズ株式会社 | Projection display device and method for instructing installation attitude |
| JP2015132747A (en) * | 2014-01-15 | 2015-07-23 | セイコーエプソン株式会社 | Projector |
| CN108732913A (en) * | 2018-08-14 | 2018-11-02 | 广东小天才科技有限公司 | Intelligent watch with rotatable projection device and use method thereof |
| CN113031384B (en) * | 2021-03-15 | 2022-05-17 | 黄淮学院 | Portable projection arrangement of marketing training teaching |
| JP2023023791A (en) * | 2021-08-06 | 2023-02-16 | セイコーエプソン株式会社 | Display method |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000019638A (en) * | 1998-07-06 | 2000-01-21 | Nec Corp | Projector |
| JP2000122617A (en) * | 1998-10-12 | 2000-04-28 | Toshiba Corp | Trapezoidal distortion correction device |
| JP2004102010A (en) * | 2002-09-11 | 2004-04-02 | Canon Inc | Projector apparatus |
| JP4427247B2 (en) * | 2002-12-17 | 2010-03-03 | リコーエレメックス株式会社 | Presentation device |
| JP4090386B2 (en) * | 2003-05-13 | 2008-05-28 | シャープ株式会社 | projector |
| JP3834818B2 (en) * | 2003-06-18 | 2006-10-18 | 船井電機株式会社 | Image display projector |
| JP2005122384A (en) * | 2003-10-15 | 2005-05-12 | Seiko Epson Corp | Screen system |
| JP2006135675A (en) * | 2004-11-05 | 2006-05-25 | Sanyo Electric Co Ltd | Projection type video display device |
-
2006
- 2006-07-31 JP JP2006208162A patent/JP5192669B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101801654B1 (en) * | 2016-07-05 | 2017-11-27 | 주식회사 글로벌샘 | Advertisement apparatus for subway train |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008033116A (en) | 2008-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5192669B2 (en) | Projector, position adjusting device, and position adjusting method | |
| US10104351B2 (en) | Projection system and calibration apparatus | |
| TWI703400B (en) | Focal length calibration method and projection device | |
| JP4429026B2 (en) | Projector having left and right projection direction automatic adjustment device | |
| JP2006313116A (en) | Distance tilt angle detection device, and projector with detection device | |
| JP2007193203A (en) | Projection apparatus, distance measurement elevation angle control method and program for projection apparatus | |
| JP4169026B2 (en) | Ranging device and ranging method | |
| JP2003204495A (en) | Image projection device | |
| JP3742085B2 (en) | Projector having tilt angle measuring device | |
| JP4169027B2 (en) | Ranging device and ranging method | |
| JP3926311B2 (en) | Projector having tilt angle measuring device | |
| JP2006215518A (en) | Projector | |
| JP2005331585A (en) | Projector having device for measuring distance and tilt angle | |
| JP2005017336A (en) | Projector having projection surface distance measuring device | |
| JP2017169195A (en) | Projection system and calibration device | |
| JP2005017350A (en) | Projector | |
| US11320725B2 (en) | Projection type display apparatus, projection type display system, control method of projection type display apparatus, and storage medium | |
| JP4803972B2 (en) | Image projection device | |
| JP3709406B2 (en) | Projector having automatic trapezoidal distortion correction means | |
| JP2005159426A (en) | Projector with automatic trapezoidal distortion correcting means | |
| JP2005070412A (en) | Image projector and its focus adjustment method | |
| JP2005150818A (en) | Projector system provided with computer including distortion correction means | |
| JP5150986B2 (en) | projector | |
| CN110908224B (en) | Projection apparatus and control method thereof | |
| JP3772885B2 (en) | Projector with trapezoidal distortion correction means |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090615 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120104 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120301 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120717 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120913 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130201 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160208 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |