JP4594785B2 - Navigation device - Google Patents
Navigation device Download PDFInfo
- Publication number
- JP4594785B2 JP4594785B2 JP2005112058A JP2005112058A JP4594785B2 JP 4594785 B2 JP4594785 B2 JP 4594785B2 JP 2005112058 A JP2005112058 A JP 2005112058A JP 2005112058 A JP2005112058 A JP 2005112058A JP 4594785 B2 JP4594785 B2 JP 4594785B2
- Authority
- JP
- Japan
- Prior art keywords
- candidate point
- current position
- reliability
- calculated
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
Description
本発明は、車両等の移動体に搭載され、当該移動体の現在位置を算出して表示する技術に関する。 The present invention relates to a technique that is mounted on a moving body such as a vehicle and calculates and displays the current position of the moving body.
特許文献1には、ジャイロ等の方位センサにより測定した車両の進行方向と、車速センサまたは距離センサにより測定した車両の進行距離とに基づいて、前回求めた車両の現在位置からの相対位置に従って車両の仮想現在位置を求め、当該仮想現在位置を地図データ内の道路位置に合わせることにより、車両の現在位置を地図データ内の道路上に推定する位置検出方式について開示されている。 Patent Document 1 discloses a vehicle according to the relative position from the current position of the vehicle obtained last time based on the traveling direction of the vehicle measured by an orientation sensor such as a gyro and the traveling distance of the vehicle measured by a vehicle speed sensor or a distance sensor. A position detection method is disclosed in which the current position of the vehicle is estimated on the road in the map data by obtaining the current virtual position and matching the virtual current position with the road position in the map data.
当該特許文献1に記載の技術は、進行方位の変化量および走行距離に基づき定まる車両の仮想現在位置を中心とする所定範囲内のすべての道路を抽出し、抽出された全ての道路のそれぞれと当該車両の仮想現在位置との相関係数を算出して、仮想現在位置に対する誤差が最も少ないことを示す相関係数に対応する道路を、車両が位置する道路として選択し、選択した道路上に車両の現在位置を推定する。 The technique described in Patent Document 1 extracts all roads within a predetermined range centered on the virtual current position of the vehicle determined based on the amount of change in travel direction and travel distance, and each of all the extracted roads Calculate the correlation coefficient with the virtual current position of the vehicle, select the road corresponding to the correlation coefficient indicating the least error relative to the virtual current position as the road where the vehicle is located, and place it on the selected road Estimate the current position of the vehicle.
相関係数は、例えば、抽出されたそれぞれの道路の方位と仮想現在位置の車両の方位との方位差、および仮想現在位置からそれぞれの道路までの距離等に基づいて算出される。 The correlation coefficient is calculated based on, for example, the difference in orientation between the extracted orientation of each road and the orientation of the vehicle at the virtual current position, the distance from the virtual current position to each road, and the like.
ところで、1本の道路が2本に分岐するいわゆるY字分岐路において、分岐した2本の道路のなす角が小さい場合、当該2本の道路の方位差やそれぞれの道路の位置までの距離の差が少ないため、仮想現在位置に対する当該2本の道路のそれぞれの相関係数の差が小さい場合がある。そのため、方位センサや距離センサの測定誤差等に起因する測定値のばらつきのために、一方の道路上に現在位置が推定されても、次の推定タイミングでは他方の道路上に車両の現在位置が推定される場合がある。これにより、車両は1本の道路を走行しているにもかかわらず、推定タイミング毎に異なる道路上に車両の現在位置が推定され、不自然な挙動を示す場合があった。 By the way, in a so-called Y-shaped branch where one road branches into two, if the angle between the two branched roads is small, the difference in direction between the two roads and the distance to the position of each road Since the difference is small, the difference between the correlation coefficients of the two roads with respect to the virtual current position may be small. For this reason, even if the current position is estimated on one road due to variations in measurement values due to measurement errors of direction sensors and distance sensors, the current position of the vehicle on the other road is estimated at the next estimation timing. May be estimated. Thereby, although the vehicle is traveling on one road, the current position of the vehicle is estimated on different roads at each estimation timing, and the vehicle may behave unnaturally.
本発明は上記事情を鑑みてなされたものであり、本発明の目的は、Y字分岐路を通過した後に、検出される車両の現在位置が、分岐した2本の道路間を飛び移る不自然な挙動を示すことを抑えることにある。 The present invention has been made in view of the above circumstances, and an object of the present invention is that the current position of the detected vehicle jumps between two branched roads after passing through a Y-shaped branch road. Is to suppress the behavior.
上記課題を解決するために、本発明では、車両の相対変位に基づいて算出された仮想現在位置から道路上に候補点を複数算出し、前記複数算出した候補点の中で最も信頼度が高い候補点を表示する際に、前記複数算出した候補点のうち、前回算出された車両の現在位置に基づき得られた候補点である第1の候補点の信頼度と、第1の候補点以外の候補点である第2の候補点の信頼度とを比較する場合において、第1の候補点が位置するリンクと第2の候補点が位置するリンクとの方位差が予め定められた角度以下ならば、第1の候補点の信頼度に予め定められた第1のバイアス値を加算した上で、第1の候補点の信頼度と第2の候補点の信頼度とを比較し、当該方位差が予め定められた角度よりも大きいならば、第1の候補点の信頼度に、第1のバイアス値よりも小さい第2のバイアス値を加算した上で、第1の候補点の信頼度と第2の候補点の信頼度とを比較する。 In order to solve the above problems, in the present invention, a plurality of candidate points are calculated on the road from the virtual current position calculated based on the relative displacement of the vehicle, and the reliability is highest among the plurality of calculated candidate points. When displaying candidate points, out of the plurality of calculated candidate points, the reliability of the first candidate point, which is a candidate point obtained based on the current position of the vehicle calculated last time, and other than the first candidate point When comparing the reliability of the second candidate point, which is a candidate point, the orientation difference between the link where the first candidate point is located and the link where the second candidate point is located is equal to or less than a predetermined angle. Then, after adding a predetermined first bias value to the reliability of the first candidate point, the reliability of the first candidate point is compared with the reliability of the second candidate point, If the heading difference is larger than a predetermined angle, the reliability of the first candidate point is Of on obtained by adding a second bias value smaller than the bias value, comparing the reliability of the first candidate point and the reliability of the second candidate points.
また、本発明は、例えば、車両に搭載され、車両の現在位置を算出して表示装置に表示するナビゲーション装置であって、地図上の道路を構成する各リンクのリンクデータを格納する地図格納手段と、前回算出された候補点毎に、当該候補点が算出されてからの車両の走行距離および進行方位の測定値に基づいて車両の仮想現在位置を算出する仮想現在位置算出手段と、算出された仮想現在位置毎に、当該仮想現在位置および地図格納手段に格納されている各リンクのリンクデータを用いて今回の候補点を算出する候補点算出手段と、今回の候補点毎に、当該候補点の現在位置としての確からしさを示す信頼度を算出する信頼度算出手段と、信頼度算出手段によって算出された信頼度に基づいて、今回の候補点の中で最も信頼度の高い候補点を、表示装置に表示する車両の現在位置である表示候補点として決定し、決定した表示候補点を表示装置に表示する現在位置決定手段とを備え、現在位置決定手段は、今回の候補点のうち、前回の表示候補点に基づき得られた候補点である第1の候補点どうしの信頼度を比較する場合において、第1の候補点どうしの信頼度を比較し、第1の候補点の信頼度と、第1の候補点以外の候補点である第2の候補点の信頼度とを比較する場合において、第1の候補点が位置するリンクと第2の候補点が位置するリンクとの方位差が予め定められた角度以下ならば、第1の候補点の信頼度に予め定められた第1のバイアス値を加算した上で、第1の候補点の信頼度と第2の候補点の信頼度とを比較し、方位差が予め定められた角度よりも大きいならば、第1の候補点の信頼度に、第1のバイアス値よりも小さい第2のバイアス値を加算した上で、第1の候補点の信頼度と前記第2の候補点の信頼度とを比較することを特徴とするナビゲーション装置を提供する。 In addition, the present invention is a navigation device that is mounted on a vehicle, for example, calculates the current position of the vehicle and displays it on a display device, and stores the link data of each link constituting the road on the map. Virtual current position calculation means for calculating the virtual current position of the vehicle based on measured values of the travel distance and traveling direction of the vehicle since the candidate point was calculated for each candidate point calculated last time. For each virtual current position, candidate point calculation means for calculating the current candidate point using the virtual current position and link data of each link stored in the map storage means, and the candidate for each current candidate point Based on the reliability calculation means for calculating the reliability indicating the certainty of the point as the current position and the reliability calculated by the reliability calculation means, the candidate point having the highest reliability among the current candidate points And a current position determining means for determining the display candidate point that is the current position of the vehicle to be displayed on the display device, and displaying the determined display candidate point on the display device. When comparing the reliability of the first candidate points that are candidate points obtained based on the previous display candidate points, the reliability of the first candidate points is compared and the reliability of the first candidate points is compared. And the reliability of the second candidate point that is a candidate point other than the first candidate point, the link where the first candidate point is located and the link where the second candidate point is located If the azimuth difference is equal to or smaller than a predetermined angle, the reliability of the first candidate point and the second candidate point are obtained by adding the predetermined first bias value to the reliability of the first candidate point. If the heading difference is greater than a predetermined angle After adding a second bias value smaller than the first bias value to the reliability of the first candidate point, the reliability of the first candidate point is compared with the reliability of the second candidate point A navigation device is provided.
本発明によれば、車両の現在位置として前回算出された位置と同一の道路上にある候補点が今回の車両の現在位置として算出される可能性を高くすることができる。従って、Y字分岐路を通過した後に検出される車両の現在位置が、分岐した2本の道路上を飛び移る挙動を示すことを抑えることができ、車両の現在位置を、実際の車両の挙動に沿って表示させることができる。 According to the present invention, it is possible to increase the possibility that a candidate point on the same road as the position previously calculated as the current position of the vehicle is calculated as the current position of the current vehicle. Accordingly, it is possible to suppress the current position of the vehicle detected after passing through the Y-shaped branch road from jumping on two branched roads, and the current position of the vehicle can be determined based on the actual behavior of the vehicle. Can be displayed.
以下に、本発明の第1の実施の形態について説明する。 The first embodiment of the present invention will be described below.
図1は、本発明の一実施形態に係るナビゲーションシステム10のシステム構成図である。ナビゲーションシステム10は、例えば車両に搭載され、センサ11、表示装置12、およびナビゲーション装置20を備える。
FIG. 1 is a system configuration diagram of a
センサ11は、GPS受信機や、加速度センサ、方位センサ、車速センサ等であり、測地衛星に対する車両の現在位置や、車両の進行方位、車両の移動距離等を測定する。
The
ナビゲーション装置20は、道路データを含む地図データを格納しており、センサ11からの測定信号に基づいて、車両の相対変位を算出し、地図データおよび算出した相対変位に基づいて、車両の現在位置を算出して表示装置12に表示する。
The
なお、表示装置12は、車両の現在位置を画像として表示するが、音声を再生する機能を有し、ナビゲーション装置20が車両の現在位置と共に生成した音声ガイダンス等を、当該車両の現在位置と共に再生してもよい。
The
次に、ナビゲーション装置20についてさらに詳しく説明する。ナビゲーション装置20は、分岐テーブル更新部200、分岐テーブル格納部201、仮想現在位置算出部202、候補点算出部203、信頼度算出部204、現在位置決定部205、および地図格納部206を有する。
Next, the
地図格納部206は、地図データおよび道路を複数のリンクと呼ばれる線分で近似したリンクデータを格納する。それぞれのリンクには、当該リンクの地図上の長さ、当該リンクの始点座標および終点座標等が対応付けられている。なお、ナビゲーション装置20は、地図格納部206内にリンクデータのみを格納し、当該リンクデータに基づいて車両の現在位置を算出し、算出した現在位置を、外部から取得した地図データと共に表示装置12に表示させてもよい。
The
分岐テーブル格納部201は、車両が道路の分岐点付近を通過した場合に、当該分岐点に接続する複数の道路のそれぞれに対応するリンク上に算出された候補点の識別情報を、当該分岐点に対応する地図上の座標に対応付けて格納する。また、分岐テーブル格納部201は、車両の走行距離に応じて減算される有効距離を、それぞれの分岐点の座標に対応付けて格納する。当該有効距離は、分岐点の座標が登録される際に設定される。
When the vehicle passes near a branch point of a road, the branch
仮想現在位置算出部202は、例えば、センサ11からの測定信号に基づいて、単位時間当たりに車両が進んだ走行距離を算出する。そして、仮想現在位置算出部202は、前回算出された候補点毎に、当該候補点からの車両の走行距離および進行方位の測定値に基づいて、車両の相対変位を算出し、前回算出された候補点から、算出した相対変位分、車両の位置を移動させることにより、車両の仮想現在位置を算出する。
For example, the virtual current
候補点算出部203は、地図格納部206を参照して、仮想現在位置算出部202が算出した仮想現在位置毎に、当該仮想現在位置から所定範囲内のリンクであって、かつ、当該仮想現在位置における車両の進行方位との方位差が所定角度以内のリンクを抽出し、抽出したリンク上に、今回の候補点を算出する。仮想現在位置から所定範囲内にリンクが存在しない場合、候補点算出部203は、当該仮想現在位置をフリー状態の今回の候補点として算出する。
The candidate
また、候補点算出部203は、1つの仮想現在位置から複数の候補点が算出された場合、すなわち、当該仮想現在位置の算出源となる前回の候補点が位置するリンクが分岐している場合、当該仮想現在位置から算出された複数の候補点の識別情報と共に、リンクの分岐点の座標を分岐テーブル更新部200に通知する。
In addition, the candidate
信頼度算出部204は、候補点算出部203が算出した今回の候補点のそれぞれの信頼度を算出する。具体的には、仮想現在位置算出部202が算出した仮想現在位置における車両の進行方位と、候補点算出部203が算出した今回の候補点が位置するリンクの方位との方位差θ、および当該仮想現在位置から当該今回の候補点が位置するリンクまでの距離Lに基づいて、信頼度算出部204は、例えば以下の関係式によってそれぞれの候補点のエラーコストecを算出する。
ec=αθ+βL
ここで、αおよびβは重み係数である。
The
ec = αθ + βL
Here, α and β are weighting factors.
上記関係式から明らかなように、方位差θおよび距離Lの値が大きくなると、エラーコストecは大きな値となる。また、仮想現在位置における車両の進行方位と、今回の候補点が位置するリンクの方位とが近くなり、かつ当該仮想現在位置が当該今回の候補点が位置するリンク上に位置する場合、エラーコストecは0に近づく。 As is clear from the above relational expression, the error cost ec increases as the values of the orientation difference θ and the distance L increase. In addition, when the traveling direction of the vehicle at the virtual current position is close to the direction of the link where the current candidate point is located and the virtual current position is located on the link where the current candidate point is located, the error cost ec approaches zero.
次に、信頼度算出部204は、例えば以下の関係式に基づいて、前回の候補点までに累積しているエラーコストecに今回の候補点のエラーコストecを加算して、今回の候補点の累積エラーコストec(n)を算出する。
ec(n)=(1−k)ec+kec(n−1)
ここで、ecは今回の候補点のエラーコストを示し、ec(n−1)は前回の候補点における累積エラーコストを示し、kは0より大きく1より小さい重み係数を示す。
Next, the
ec (n) = (1-k) ec + kec (n-1)
Here, ec represents the error cost of the current candidate point, ec (n−1) represents the accumulated error cost at the previous candidate point, and k represents a weighting coefficient greater than 0 and smaller than 1.
次に、信頼度算出部204は、例えば以下の関係式に基づいて、今回の候補点の累積エラーコストec(n)から今回の候補点の信頼度trustを算出する。
trust=100/(1+ec(n))
上記関係式から明らかなように、累算エラーコストec(n)が大きくなるのにしたがって、信頼度trustは減少し、0に近づく。一方、累算エラーコストec(n)が小さくなるのにしたがって、信頼度trustは増大し、100に近づく。
Next, the
trust = 100 / (1 + ec (n))
As is clear from the above relational expression, as the accumulated error cost ec (n) increases, the reliability trust decreases and approaches zero. On the other hand, as the accumulated error cost ec (n) decreases, the reliability trust increases and approaches 100.
なお、候補点算出部203が今回の候補点としてフリー状態の候補点を算出した場合、信頼度算出部204は、フリー状態の候補点に、エラーコストとして予め定められた値を付与し、付与したエラーコストに基づいて、当該フリーの候補点に対する信頼度を算出する。
When the candidate
分岐テーブル更新部200は、前回の候補点の一つから算出された複数の候補点の識別情報と共にリンクの分岐点の座標を、候補点算出部203から通知された場合に、当該複数の候補点の識別情報を、当該分岐点の座標に対応付けて分岐テーブル格納部201に格納する。このとき、分岐テーブル更新部200は、有効距離を、分岐点の座標に対応付けて格納する。
The branch
また、分岐テーブル更新部200は、仮想現在位置算出部202が仮想現在位置を算出するタイミング等の所定のタイミングで、分岐テーブル格納部201に格納されているそれぞれの有効距離を、前回減算してから車両が進んだ距離分減算する。そして、有効距離が0以下となった候補点および分岐点の座標を分岐テーブル格納部201から削除する。
In addition, the branch
現在位置決定部205は、信頼度算出部204によって算出された信頼度に基づいて、今回算出された候補点の中で最も信頼度の高い候補点を、表示装置12に表示させる車両の現在位置である表示候補点として決定し、決定した表示候補点を表示装置12に表示する。
Based on the reliability calculated by the
具体的には、今回算出された候補点の中で最も信頼度の高い候補点を選択し、選択した候補点が、前回の表示候補点から算出された候補点である場合には、選択した候補点を今回の表示候補点として決定して表示装置12に表示し、選択した候補点が、前回の表示候補点から算出された候補点でない場合には、以下のような処理を行う。
Specifically, the candidate point with the highest reliability among the candidate points calculated this time is selected, and the selected candidate point is selected if it is a candidate point calculated from the previous display candidate point. The candidate point is determined as the current display candidate point and displayed on the
分岐テーブル格納部201を参照して、分岐テーブル格納部201内にない、または分岐テーブル格納部201内の同一の分岐点の座標に対応付けられていない候補点どうしの信頼度を比較する場合、現在位置決定部205は、信頼度算出部204によって算出された信頼度を比較する。
When comparing the reliability of candidate points that are not in the branch
分岐テーブル格納部201内の同一の分岐点の座標に対応付けられており、前回の表示候補点に基づき得られた候補点である第1の候補点どうしの信頼度を比較する場合、現在位置決定部205は、第1の候補点どうしの信頼度を比較する。
When comparing the reliability of the first candidate points that are associated with the coordinates of the same branch point in the branch
分岐テーブル格納部201内の同一の分岐点の座標に対応付けられており、第1の候補点の信頼度と第1の候補点以外の候補点である第2の候補点の信頼度とを比較する場合であって、第1の候補点が位置するリンクと第2の候補点が位置するリンクとの方位差が予め定められた角度以下の場合、現在位置決定部205は、第1の候補点の信頼度に予め定められた第1のバイアス値を加算した上で、第1の候補点の信頼度と第2の候補点の信頼度とを比較する。
The reliability of the first candidate point and the reliability of the second candidate point that is a candidate point other than the first candidate point are associated with the coordinates of the same branch point in the branch
分岐テーブル格納部201内の同一の分岐点の座標に対応付けられており、第1の候補点の信頼度と第1の候補点以外の今回の候補点である第2の候補点の信頼度とを比較する場合であって、第1の候補点が位置するリンクと第2の候補点が位置するリンクとの方位差が予め定められた角度よりも大きい場合、現在位置決定部205は、第1の候補点の信頼度に、第1のバイアス値よりも小さい第2のバイアス値を加算した上で、第1の候補点の信頼度と第2の候補点の信頼度とを比較する。
Corresponding to the coordinates of the same branch point in the branch
このように今回算出されたそれぞれの候補点の信頼度を比較することによって、現在位置決定部205は、最も信頼度が高い候補点を今回の表示候補点として決定し、決定した表示候補点を表示装置12に表示する。
Thus, by comparing the reliability of each candidate point calculated this time, the current
図2は、候補点算出部203によって行われる処理を説明するための概念図である。まず、候補点算出部203は、仮想現在位置算出部202によって算出された仮想現在位置401から所定の範囲60内のリンクの中で、前回の候補点400が位置するリンク300と接続されているリンクを抽出する。図2に示す例では、リンク306および307が除かれ、リンク301、302、303、304、および305が候補点算出部203によって抽出される。
FIG. 2 is a conceptual diagram for explaining the processing performed by the candidate
そして、候補点算出部203は、抽出したリンクの中から、仮想現在位置401における車両の進行方位との方位差が所定角度以内のリンクをさらに抽出する。図2に示す例では、リンク303が除かれ、リンク301、302、304、および305が候補点算出部203によって抽出される。
Then, the candidate
次に、候補点算出部203は、前回の候補点400が算出されてからの車両の走行距離分、前回算出された候補点400から、抽出したリンク上を辿り、今回の候補点402および403を当該リンク上に配置する。図2に示す例では、候補点算出部203は、リンク300および304に沿って、前回の候補点400から走行距離Rだけ進めた位置に今回の候補点402を配置し、リンク300および301に沿って、前回の候補点400から走行距離Rだけ進めた位置に今回の候補点403を配置する。
Next, the candidate
なお、当該仮想現在位置から所定範囲内にリンクが存在しない、当該仮想現在位置における車両の進行方位との方位差が所定角度以内のリンクが存在しない、または、前回の候補点が位置するリンクに接続されているリンクが存在しない等の場合に、候補点算出部203は、仮想現在位置算出部202が算出した仮想現在位置401をフリー状態の今回の候補点として算出する。
In addition, there is no link within a predetermined range from the virtual current position, there is no link within a predetermined angle with the traveling direction of the vehicle at the virtual current position, or the link where the previous candidate point is located When there is no connected link, the candidate
図3は、分岐テーブル格納部201に格納されるデータの構造の一例を示す。分岐テーブル格納部201は、レコード2013を有する。各レコード2103は、車両の走行距離に応じて減算される有効距離2011、および、分岐点に接続する複数の道路のそれぞれに対応するリンク上に算出された今回の候補点の識別情報である分岐候補点ID2012を、分岐点座標2010に対応付けて格納する。
FIG. 3 shows an example of the structure of data stored in the branch
分岐テーブル格納部201を参照することにより、現在位置決定部205は、それぞれの候補点が、同一の分岐点座標に対応付けられているか否かを判定することができる。
By referring to the branch
なお、分岐テーブル更新部200は、分岐テーブル格納部201に分岐点座標に対応付けて有効距離を登録する際、候補点IDに対応する候補点が高速道路上にある場合と一般道路上にある場合とで、異なる有効距離を登録してもよい。例えば、分岐テーブル更新部200は、候補点IDに対応する候補点が高速道路上にある場合に有効距離として2kmを、一般道路上にある場合に有効距離として700mを、それぞれ分岐テーブル格納部201に登録する。
When the branch
また、本実施形態において、1つの前回の候補点から1つの今回の候補点が算出される場合、今回の候補点の識別情報は、前回の候補点の識別情報を引き継ぐ。一方、1つの前回の候補点から2つ以上の今回の候補点が算出される場合、いずれかの今回の候補点の識別情報は、前回の候補点の識別情報を引き継ぎ、他の今回の候補点の識別情報は、新たに生成される。また、それぞれの候補点には、少なくとも、前回算出されたものか、今回算出されたものかを区別するための情報が対応付けられている。 In this embodiment, when one current candidate point is calculated from one previous candidate point, the identification information of the current candidate point inherits the identification information of the previous candidate point. On the other hand, when two or more current candidate points are calculated from one previous candidate point, the identification information of one of the current candidate points inherits the identification information of the previous candidate point, and other current candidate points The point identification information is newly generated. Each candidate point is associated with at least information for distinguishing whether it was calculated last time or this time.
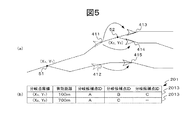
図4、図5、および図6は、分岐テーブル格納部201が更新される様子を説明するための概念図である。
4, FIG. 5, and FIG. 6 are conceptual diagrams for explaining how the branch
図4の(a)に示すようなリンク構成において、車両が道路の分岐点付近を通過すると、前回の候補点410に基づいて、当該道路の分岐点に対応するリンクデータ内の分岐点51に接続されているリンク上に、今回の候補点411および412がそれぞれ配置される。このとき、分岐テーブル更新部200は、分岐テーブル格納部201内に、図4の(b)に示すようなレコード2013を登録する。
In the link configuration as shown in FIG. 4A, when the vehicle passes near the branch point of the road, the
ここで、候補点410のIDをAとすると、候補点算出部203は、候補点410から候補点411および412を生成する際に、例えば、候補点411の分岐候補点IDを候補点410から引継ぎAとし、候補点412に新たな分岐候補点IDであるBを割り当てる。なお、本例において、分岐テーブル格納部201内に新たに分岐点の座標を登録する場合、分岐テーブル更新部200は、当該分岐点に対応付ける有効距離として700mを登録するものとする。
Here, when the
そして、分岐テーブル更新部200は、分岐テーブル格納部201内に格納されている全ての有効距離を、車両の走行距離に従って減算する。そして、図5の(a)に示すように、車両が分岐点52に対応する道路の分岐点付近を通過すると、候補点算出部203は、分岐点52に接続されるリンク上に、前回の候補点411から今回の候補点413および414を生成すると共に、前回の候補点412から今回の候補点415を生成する。
Then, the branch
このとき、候補点算出部203は、例えば、候補点413の分岐候補点IDを候補点411から引継ぎAとし、候補点415の分岐候補点IDを候補点412から引継ぎBとし、候補点414に新たな分岐候補点IDであるCを割り当てる。また、分岐テーブル更新部200は、分岐点52に対応付けて、当該分岐点52を介して分岐した候補点の分岐候補点IDを分岐テーブル格納部201に追加する。
At this time, for example, the candidate
そして、分岐テーブル更新部200は、他のレコード2013を参照して、新たに割り当てた分岐候補点IDと同一の分岐点座標に対応付けられている分岐候補点IDが、分岐テーブル格納部201の他の分岐点座標に対応付けて格納されている場合に、新たに割り当てた分岐候補点IDを、当該他の分岐点座標に対応付けて分岐テーブル格納部201に格納する。
Then, the branch
図5の(b)に示す例では、新たに割り当てた候補点IDであるCと同一の分岐点座標(X2,Y2)に対応付けられている候補点IDであるAが、他の分岐点座標(X1,Y1)に対応付けられているので、分岐テーブル更新部200は、新たに割り当てた候補点IDであるCを、他の分岐点座標(X1,Y1)に対応付けて、分岐テーブル格納部201に格納する。
In the example shown in FIG. 5B, the candidate point ID A that is associated with the same branch point coordinates (X 2 , Y 2 ) as the newly assigned candidate point ID C is another Since it is associated with the branch point coordinates (X 1 , Y 1 ), the branch
そして、図6の(a)に示すように車両がさらに進んだ場合、候補点算出部203は、前回の候補点413、414、および415から、今回の候補点416、417、および418をそれぞれ生成する。このとき、分岐テーブル更新部200は、分岐テーブル格納部201内に格納されている全ての有効距離を車両の走行距離に従って減算し、有効距離が0以下となった分岐点座標のレコード2013を分岐テーブル格納部201から削除する。
When the vehicle further advances as shown in FIG. 6A, the candidate
図6の(b)に示す例では、車両の走行距離に従って、分岐点座標(X1,Y1)に対応付けられている有効距離が0以下となったので、分岐テーブル更新部200は、分岐点座標(X1,Y1)に対応するレコード2013を分岐テーブル格納部201から削除した。
In the example shown in FIG. 6B, the effective distance associated with the branch point coordinates (X 1 , Y 1 ) is 0 or less according to the travel distance of the vehicle. The
図7は、ナビゲーション装置20の動作の一例を示すフローチャートである。例えば、車両のエンジン始動等の所定のタイミングで、ナビゲーション装置20は、本フローチャートに示す処理を開始する。
FIG. 7 is a flowchart showing an example of the operation of the
まず、ナビゲーション装置20は、仮想現在位置算出部202は、タイマの値を参照して、所定時間(例えば100ms)が経過したか否かを判定する(S100)。所定時間が経過していない場合(S100:No)、仮想現在位置算出部202は、所定時間が経過するまでステップ100を繰り返す。
First, in the
所定時間が経過した場合(S100:Yes)、仮想現在位置算出部202は、タイマをリセットスタートし、センサ11から測定信号を取得する(S101)。そして、仮想現在位置算出部202は、センサ11から取得した測定信号に基づいて、車両の相対変位を算出し、前回からの車両の走行距離が所定距離(例えば20m)以上となったか否かを判定する(S102)。前回からの走行距離が所定距離未満の場合(S102:No)、仮想現在位置算出部202は、再びステップ100に示した処理を行う。
When the predetermined time has elapsed (S100: Yes), the virtual current
前回からの走行距離が所定距離以上の場合(S102:Yes)、ナビゲーション装置20は、後述する現在位置算出処理を行い(S200)、仮想現在位置算出部202は、再びステップ100に示した処理を行う。
If the travel distance from the previous time is equal to or greater than the predetermined distance (S102: Yes), the
図8は、ステップ200の現在位置算出処理の一例を示すフローチャートである。まず、仮想現在位置算出部202は、前回算出された候補点の中の1つを選択し、選択した候補点から、図7のステップ102において算出した車両の相対変位分車両の位置を進めることにより、選択した候補点に対応する仮想現在位置を算出する(S201)。
FIG. 8 is a flowchart illustrating an example of the current position calculation process in
次に、候補点算出部203は、ステップ201において算出された仮想現在位置から所定の範囲内のリンク上に今回の候補点を配置する(S202)。そして、信頼度算出部204は、ステップ202において配置された候補点の信頼度を算出する(S203)。そして、仮想現在位置算出部202は、前回算出された候補点の全てに対して仮想現在位置を算出したか否かを判定する(S204)。前回算出された候補点の全てに対して仮想現在位置を算出していない場合(S204:No)、仮想現在位置算出部202は、再びステップ201に示した処理を行う。
Next, the candidate
前回算出された候補点の全てに対して仮想現在位置を算出した場合(S204:Yes)、分岐テーブル更新部200は、後述する分岐テーブル更新処理を行う(S300)。そして、現在位置決定部205は、後述する現在位置決定処理を行い(S400)、本フローチャートに示す処理は終了する。
When the virtual current position is calculated for all of the previously calculated candidate points (S204: Yes), the branch
なお、ステップ204において、仮想現在位置算出部202は、前回の候補点の信頼度が所定値以下の候補点を、仮想現在位置の算出対象から外すようにしてもよい。
In
図9は、分岐テーブル更新処理の一例を示すフローチャートである。まず、分岐テーブル更新部200は、前回からの車両の走行距離分(例えば20m)を分岐テーブル格納部201内の全ての有効距離から減ずることにより、それぞれの分岐点座標の有効距離を更新する(S301)。
FIG. 9 is a flowchart illustrating an example of the branch table update process. First, the branch
次に、分岐テーブル更新部200は、有効距離が0以下となった分岐点座標のレコードを分岐テーブル格納部201から削除する(S302)。
Next, the branch
そして、分岐テーブル更新部200は、候補点算出部203から受け取った新たな分岐点座標、候補点ID、および有効距離を分岐テーブル格納部201に追加し(S303)、本フローチャートに示す処理は終了する。
Then, the branch
図10は、現在位置決定処理の一例を示すフローチャートである。まず、現在位置決定部205は、信頼度算出部204が算出した信頼度に基づいて、候補点算出部203が配置した今回の候補点の中で、最も信頼度の高い今回の候補点を選択する(S401)。
FIG. 10 is a flowchart illustrating an example of the current position determination process. First, the current
そして、現在位置決定部205は、選択した今回の候補点が、前回の表示候補点から算出された候補点であるか否かを判定する(S402)。現在位置決定部205は、例えば、前回表示候補点として決定した候補点のIDを保持し、保持している候補点のIDと選択した候補点のIDとを比較することにより、選択した今回の候補点が、前回の表示候補点から算出された候補点であるか否かを判定する。
Then, the current
選択した今回の候補点が、前回の表示候補点から算出された候補点である場合(S409)、現在位置決定部205は、選択した候補点を今回の表示候補点として決定する。そして決定した今回の表示候補点を表示装置12に表示し、本フローチャートに示す処理は終了する。
When the selected current candidate point is a candidate point calculated from the previous display candidate point (S409), the current
選択した今回の候補点が、前回の表示候補点から算出された候補点ではない場合(S402:No)、現在位置決定部205は、分岐テーブル格納部201を参照して、選択した今回の候補点が、前回の表示候補点から算出された今回の候補点に対応付けられている分岐点座標と同一の分岐点座標に対応付けられているか否かを判定する(S403)。同一の分岐点座標に対応付けられていない場合(S403:No)、現在位置決定部205は、ステップ409に示した処理を行う。
When the selected current candidate point is not a candidate point calculated from the previous display candidate point (S402: No), the current
同一の分岐点座標に対応付けられている場合(S403:Yes)、現在位置決定部205は、地図格納部206を参照して、選択した今回の候補点が位置するリンクと、前回の表示候補点から算出された今回の候補点が位置するリンクとの方位差が所定角度以下か否かを判定する(S404)。なお、本例において所定角度は、5度である。
When it is associated with the same branch point coordinates (S403: Yes), the current
方位差が所定角度よりも大きい場合(S404:No)、現在位置決定部205は、信頼度に加算するためのバイアス値を、例えば0と算出し(S405)、ステップ407に示す処理を行う。
When the azimuth difference is larger than the predetermined angle (S404: No), the current
方位差が所定角度以下である場合(S404:Yes)、現在位置決定部205は、信頼度に加算するためのバイアス値を、ステップ405において設定されるバイアス値よりも高い、例えば2と算出する(S406)。
When the azimuth difference is equal to or smaller than the predetermined angle (S404: Yes), the current
そして、現在位置決定部205は、ステップ405または406において算出されたバイアス値を、前回の表示候補点から算出された今回の候補点の信頼度に加算した値が、選択した候補点の信頼度以上か否かを判定する(S407)。
Then, the current
バイアス値を前回の表示候補点から算出された今回の候補点の信頼度に加算した値が、選択した候補点の信頼度未満である場合(S407:No)、現在位置決定部205は、ステップ409に示した処理を行う。
If the value obtained by adding the bias value to the reliability of the current candidate point calculated from the previous display candidate point is less than the reliability of the selected candidate point (S407: No), the current
バイアス値を前回の表示候補点から算出された今回の候補点の信頼度に加算した値が、選択した候補点の信頼度以上である場合(S407:Yes)、現在位置決定部205は、次に信頼度の高い今回の候補点を選択し(S408)、再びステップ402に示した処理を行う。
When the value obtained by adding the bias value to the reliability of the current candidate point calculated from the previous display candidate point is equal to or higher than the reliability of the selected candidate point (S407: Yes), the current
以上、本発明の実施の形態について説明した。 The embodiment of the present invention has been described above.
上記説明から明らかなように、本実施形態によれば、Y字分岐路を通過した後に、検出される車両の現在位置が、分岐した2本の道路間を飛び移るような不自然な挙動を示すことを抑えることができる。 As is clear from the above description, according to this embodiment, after passing through the Y-shaped branch road, the detected current position of the vehicle jumps between the two branched roads. It can be suppressed.
なお、本発明は上記の実施形態に限定されるものではなく、その要旨の範囲内で数々の変形が可能である。 In addition, this invention is not limited to said embodiment, Many deformation | transformation are possible within the range of the summary.
例えば、ナビゲーション装置20内の分岐テーブル更新部200、仮想現在位置算出部202、候補点算出部203、信頼度算出部204、および現在位置決定部205は、ASIC(Application Specific Integrated Circuit)、FPGA(Field Programmable Gate Array)等の集積ロジックICによりハード的に実現されるものでもよく、DSP(Digital Signal Processor)や汎用計算機によりソフトウェア的に実現されてもよく、あるいは、部分的にハードウェアまたはソフトウェアで実現させた機能ブロックを組み合わせてもよい。
For example, the branch
10・・・ナビゲーションシステム、11・・・センサ、12・・・表示装置、20・・・ナビゲーション装置、200・・・分岐テーブル更新部、201・・・分岐テーブル格納部、2010・・・分岐点座標、2011・・・有効距離、2012・・・分岐候補点ID、2013・・・レコード、202・・・仮想現在位置算出部、203・・・候補点算出部、204・・・信頼度算出部、205・・・現在位置決定部、206・・・地図格納部、300〜307・・・リンク、400、402、403、410〜418・・・候補点、401・・・仮想現在位置、50、51、52・・・分岐点、60・・・範囲
DESCRIPTION OF
Claims (1)
地図上の道路を構成する各リンクのリンクデータを格納する地図格納手段と、
前回算出された候補点毎に、当該候補点が算出されてからの前記車両の走行距離および進行方位の測定値に基づいて前記車両の仮想現在位置を算出する仮想現在位置算出手段と、
算出された仮想現在位置毎に、当該仮想現在位置および前記地図格納手段に格納されている各リンクのリンクデータを用いて今回の候補点を算出する候補点算出手段と、
前記今回の候補点毎に、当該候補点の現在位置としての確からしさを示す信頼度を算出する信頼度算出手段と、
前記信頼度算出手段によって算出された信頼度に基づいて、前記今回の候補点の中から前記表示装置に表示する前記車両の現在位置である表示候補点を決定し、決定した表示候補点を前記表示装置に表示する現在位置決定手段と
を備え、
前記現在位置決定手段は、
前記車両が分岐点を通過してから所定距離走行するまでの間は、
前記今回の候補点の中で最も信頼度の高い候補点を1つ選択し、
選択した候補点が、表示候補点として前回決定された候補点から算出された候補点である場合には、当該選択した候補点を表示候補点として決定し、
選択した候補点が、表示候補点として前回決定された候補点から算出された候補点でない場合には、当該選択した候補点が位置するリンクと、表示候補点として前回決定された候補点から算出された候補点が位置するリンクとのなす角度が予め定められた角度よりも大きいか否かを判定し、
前記なす角度が予め定められた角度以下である場合、予め定められた第1のバイアス値を、前記表示候補点として前回決定された候補点から算出された候補点の信頼度に加算した上で、選択した候補点の信頼度と、前記表示候補点として前回決定された候補点から算出された候補点の信頼度とを比較し、信頼度の高い方の候補点を表示候補点として決定し、
前記なす角度が予め定められた角度よりも大きい場合、前記第1のバイアス値よりも小さい第2のバイアス値を、前記表示候補点として前回決定された候補点から算出された候補点の信頼度に加算した上で、選択した候補点の信頼度と、前記表示候補点として前回決定された候補点から算出された候補点の信頼度とを比較し、信頼度の高い方の候補点を表示候補点として決定することを特徴とするナビゲーション装置。 A navigation device that is mounted on a vehicle and calculates a current position of the vehicle and displays it on a display device,
Map storage means for storing link data of each link constituting the road on the map;
For each candidate point calculated last time, virtual current position calculation means for calculating a virtual current position of the vehicle based on measured values of the travel distance and traveling direction of the vehicle since the candidate point was calculated;
For each calculated virtual current position, candidate point calculation means for calculating the current candidate point using link data of each link stored in the virtual current position and the map storage means;
For each of the candidate points this time, reliability calculation means for calculating reliability indicating the certainty as the current position of the candidate points;
Based on the reliability calculated by the reliability calculation means, the display candidate point that is the current position of the vehicle to be displayed on the display device is determined from the current candidate points, and the determined display candidate point is A current position determining means for displaying on the display device,
The current position determining means includes
Until the vehicle travels a predetermined distance after passing the branch point,
Select one candidate point with the highest reliability among the candidate points
If the selected candidate point is a candidate point calculated from the candidate point previously determined as the display candidate point, the selected candidate point is determined as the display candidate point,
If the selected candidate point is not a candidate point calculated from the previously determined candidate point as the display candidate point, the selected candidate point is calculated from the link where the selected candidate point is located and the previously determined candidate point as the display candidate point Determining whether the angle formed with the link where the candidate point is positioned is greater than a predetermined angle;
When the angle formed is equal to or less than a predetermined angle, a predetermined first bias value is added to the reliability of the candidate point calculated from the candidate point previously determined as the display candidate point. The reliability of the selected candidate point is compared with the reliability of the candidate point calculated from the candidate point previously determined as the display candidate point, and the candidate point with the higher reliability is determined as the display candidate point. ,
When the angle formed is larger than a predetermined angle, the reliability of the candidate point calculated from the candidate point previously determined as the display candidate point with a second bias value smaller than the first bias value. In addition, the reliability of the selected candidate point is compared with the reliability of the candidate point calculated from the previously determined candidate point as the display candidate point, and the candidate point with the higher reliability is displayed. A navigation device characterized in that it is determined as a candidate point .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005112058A JP4594785B2 (en) | 2005-04-08 | 2005-04-08 | Navigation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005112058A JP4594785B2 (en) | 2005-04-08 | 2005-04-08 | Navigation device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006292502A JP2006292502A (en) | 2006-10-26 |
| JP4594785B2 true JP4594785B2 (en) | 2010-12-08 |
Family
ID=37413232
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005112058A Active JP4594785B2 (en) | 2005-04-08 | 2005-04-08 | Navigation device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4594785B2 (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4931706B2 (en) * | 2007-06-25 | 2012-05-16 | アルパイン株式会社 | Navigation device |
| JP5220479B2 (en) * | 2008-05-27 | 2013-06-26 | アルパイン株式会社 | Navigation device and vehicle position update method |
| JP5152677B2 (en) * | 2009-02-26 | 2013-02-27 | アイシン・エィ・ダブリュ株式会社 | Navigation device and navigation program |
| JP5051550B2 (en) * | 2009-02-26 | 2012-10-17 | アイシン・エィ・ダブリュ株式会社 | Navigation device and navigation program |
| WO2011044923A1 (en) | 2009-10-12 | 2011-04-21 | Tomtom International B. V. | Navigation device & method |
| JP5810939B2 (en) * | 2012-01-26 | 2015-11-11 | トヨタ自動車株式会社 | Vehicle road identification device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0561408A (en) * | 1991-09-02 | 1993-03-12 | Alpine Electron Inc | Vehicle position correcting method |
| JPH08334346A (en) * | 1995-06-06 | 1996-12-17 | Zanavy Informatics:Kk | Present location calculating device |
| JPH08334367A (en) * | 1995-06-09 | 1996-12-17 | Zanavy Informatics:Kk | System and method for calculating present location |
| JPH08334370A (en) * | 1995-06-09 | 1996-12-17 | Zanavy Informatics:Kk | System and method for calculating present location |
| JP2003322534A (en) * | 2002-05-07 | 2003-11-14 | Fujitsu Ten Ltd | Location device |
-
2005
- 2005-04-08 JP JP2005112058A patent/JP4594785B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0561408A (en) * | 1991-09-02 | 1993-03-12 | Alpine Electron Inc | Vehicle position correcting method |
| JPH08334346A (en) * | 1995-06-06 | 1996-12-17 | Zanavy Informatics:Kk | Present location calculating device |
| JPH08334367A (en) * | 1995-06-09 | 1996-12-17 | Zanavy Informatics:Kk | System and method for calculating present location |
| JPH08334370A (en) * | 1995-06-09 | 1996-12-17 | Zanavy Informatics:Kk | System and method for calculating present location |
| JP2003322534A (en) * | 2002-05-07 | 2003-11-14 | Fujitsu Ten Ltd | Location device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006292502A (en) | 2006-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11015957B2 (en) | Navigation system | |
| JP5152677B2 (en) | Navigation device and navigation program | |
| JP5051550B2 (en) | Navigation device and navigation program | |
| US8315798B2 (en) | Navigation device, and method for updating map data and navigation | |
| JPH02275310A (en) | Position detecting apparatus | |
| JP4594785B2 (en) | Navigation device | |
| HUT76227A (en) | Correction process and navigation system for the location of a motor vehicle | |
| JP2007155471A (en) | Vehicle position estimator and vehicle position estimating method | |
| US20080228389A1 (en) | Route-selection-supporting device, method, and program | |
| JP2024103654A (en) | Measurement accuracy calculation device, self-position estimation device, control method, program, and storage medium | |
| CN109631886B (en) | Vehicle positioning method and device, electronic equipment and storage medium | |
| KR100948089B1 (en) | Method for deciding car position by pseudo dead reckoning and car navigation system using the same | |
| JP5732377B2 (en) | Navigation device | |
| JP4835413B2 (en) | Vehicle navigation device | |
| KR20090070936A (en) | System and method for navigation, storage medium recording that metho program | |
| US7428461B2 (en) | Walker navigation device, walker navigation method, and program | |
| JP2577160B2 (en) | Vehicle position detection device | |
| JP5241958B2 (en) | Information processing apparatus, information processing method, program, and recording medium | |
| JP3971236B2 (en) | Location device | |
| JP2008241418A (en) | Navigation device, navigation method, and navigation program | |
| JP5597080B2 (en) | Computer program, map display device, and method for map data to be processed by map display device | |
| JP2006071473A (en) | Zero point error detection device for angular velocity sensor and method for the same | |
| JP4688534B2 (en) | Acceleration calibration method and navigation device | |
| JP2009287926A (en) | Navigation device and vehicle position update method | |
| JP7540559B1 (en) | Self-position estimation device and self-position estimation method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080407 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20100212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100622 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100823 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100914 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100917 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4594785 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |