JP4485437B2 - 高周波加速空胴および円形加速器 - Google Patents
高周波加速空胴および円形加速器 Download PDFInfo
- Publication number
- JP4485437B2 JP4485437B2 JP2005260112A JP2005260112A JP4485437B2 JP 4485437 B2 JP4485437 B2 JP 4485437B2 JP 2005260112 A JP2005260112 A JP 2005260112A JP 2005260112 A JP2005260112 A JP 2005260112A JP 4485437 B2 JP4485437 B2 JP 4485437B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- frequency
- cavity
- core
- accelerating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05H—PLASMA TECHNIQUE; PRODUCTION OF ACCELERATED ELECTRICALLY-CHARGED PARTICLES OR OF NEUTRONS; PRODUCTION OR ACCELERATION OF NEUTRAL MOLECULAR OR ATOMIC BEAMS
- H05H7/00—Details of devices of the types covered by groups H05H9/00, H05H11/00, H05H13/00
- H05H7/14—Vacuum chambers
- H05H7/18—Cavities; Resonators
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05H—PLASMA TECHNIQUE; PRODUCTION OF ACCELERATED ELECTRICALLY-CHARGED PARTICLES OR OF NEUTRONS; PRODUCTION OR ACCELERATION OF NEUTRAL MOLECULAR OR ATOMIC BEAMS
- H05H13/00—Magnetic resonance accelerators; Cyclotrons
- H05H13/04—Synchrotrons
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Particle Accelerators (AREA)
Description
前記同調型RF加速空胴は、空胴の共振周波数を高周波電源の印加周波数に同調させて、必要な加速電圧を発生させる。一方、非同調型RF加速空胴は、予め加速周波数の全範囲で空胴のインピーダンスを必要な値まで上げておく。
また、前記特許文献2のRF加速空胴では、共振点を加速周波数帯域に設定する必要があるために、加速コアのインピーダンスを自由に選ぶことができず、RF加速空胴のインピーダンスを十分に大きくできないという問題点を有している。さらに前記特許文献3の高周波加速空胴では、大型コアの場合、コア切断コストが上昇し、また切断面端部の磁界集中による発熱などの問題点を有している。
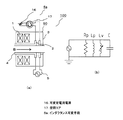
図12(a)に示すRF加速空胴100は、加速コア1と加速電極ギャップ2、空胴外壁3、真空ダクト4と、高周波電源5とで構成されている。このような構成であって、数MHz程度の周波数帯域で駆動されるRF加速空胴100は、サイズに比較して高周波数の波長が長いため、その動作はほぼ電気回路モデルで解析することができる。図12(b)はRF加速空胴100を電気回路でモデル化したものを示す。図12(b)のインダクタンスXsと抵抗Rsの直列接続がRF加速空胴100に設けられた加速コア1を、キャパシタンスCが加速電極ギャップ2を表している。加速コア1が抵抗成分Rsを有しているのは、加速コア1の励磁に伴う発熱(コアロス)が、回路で表現すると抵抗に相当するからである。コアロスを含めた加速コア1のインピーダンスZは、複素透磁率μ(=μ′−μ″)を用いて(μ′は透磁率の実数部、μ″は透磁率の虚数部)次の数式1によって示される。

所定の加速電圧V(ピーク値)を得るために必要な電力Pは、以下で求められる。
一方、数式3において、分母の第1項が第2項より十分大きければ、少々共振条件からずれても、|Zc|は低下しない。すなわち、RpをXp(=ωLp)と比較して小さくすれば、特に共振を取らなくても実用上は問題がない(非同調型RF加速空胴、特許文献2、3)。この関係を加速コア1のQ値を用いて表現すると、次の5式となる。
加速コア1の磁性体材としてMAコア(Magnetic Alloyコア)、例えば、アモルファス系の積層合金薄膜を用いている非同調型RF加速空胴は、1000Gsを越える磁束密度においてもシャントインピーダンス(損失抵抗)が劣化しない特徴があるが、シャントインピーダンスを数百Ω以上にすることが難しい。
一方、フェライトを用いた同調型RF加速空胴は、後述するように非同調型RF加速空胴と比較して、シャントインピーダンスの向上が少ない上に、RF加速空胴に印加可能な加速電圧の最大値が小さいという課題がある。
この2つの課題について、同調型RF加速空胴(フェライトコア材、Q=20)と、非同調型RF加速空胴(MAコア材、Q=0.5)について具体例を挙げて説明する。
MAコアはQ値が小さいため半値幅が大きい(数式5よりΔf=6MHz)。この例では、加速周波数帯域(2〜4MHzを想定する)が半値幅に含まれるため、計算例では加速の全周波数帯域にわたり、ピーク値の80%程度のインピーダンスを伴っている。一方、共振周波数と加速電極ギャップ2のキャパシタンスが決まれば、Xp、Rp(=Q・Xp)は一意に決まる。加速電極ギャップ2のキャパシタンスを50pF以下に抑制するのは困難なため、MAコア材を用いたRF加速空胴100のインピーダンスを数百Ω以上にするのは難しいことがわかる。
しかしながら、現実のフェライト材を用いたRF加速空胴100では、Q値を1程度のフェライトコア材を用いることが多く、RF加速空胴100のインピーダンスもそれほど上げることが出来ない。その理由はフェライト材のインダクタンス制御が難しく、高Q値のコア(共振周波数以外ではほとんど機能しないコア)を使うと、安定した制御が出来なくなるためである。
従来の同調型RF加速空胴100では、加速コア1のインダクタンスを変化させるため、直流磁界を重畳してフェライトコアの透磁率を変化させる方式を採用していた。この方式を図13について説明する。
図13は、フェライトのB−H曲線を示す(簡単のため、ヒステリシスは考慮していない)。透磁率μは、B=μHより求められる。Bはコア中の磁束密度、Hは起磁力であり、コアを鎖交する電流に比例する。これより、図13における初透磁率(原点周辺の透磁率)は、μ1=tan(θ1)ということになる。Hの大きいところではコアが飽和してくるため、B−H曲線の傾きが小さくなる。この性質を用いれば、例えば動作点qにおける透磁率μqは、μq=tan(θq)となり、透磁率を変化させることができる。この方式のRF加速空胴100は前述したように、動作の不安定性と、印加可能な加速電圧が小さいことが課題であった。
フェライトは一般にキュリー温度が低く、温度によってB−H特性が変化しやすい。特にこの方式は、B−H特性の微分値(透磁率)を制御することで共振させているため、不安定性が拡大されてしまう。さらに、RF加速空胴100を駆動することにより加速コア1自体が発熱し、温度平衡に達するまで加速コア1の温度が変化していくという問題もあり、RF加速空胴100の制御を難しくしている。
従来の同調型RF加速空胴100では、制御の難しさ故、加速周波数とRF加速空胴100の共振周波数のマッチング誤差を大きくみる必要があった。これは、マッチングがずれてもインピーダンスが変化しにくいコア、すなわちQ値の低い加速コア1を指向することを意味しており、従来の同調型RF加速空胴では、Q値が〜1程度のフェライトコア材を用いることが多かった。
この程度のQ値では、表1に示された高インピーダンスRF加速空胴は実現できず、現在では、熱的安定性、動作領域に優れたMAコア材を用いた非同調型のRF加速空胴100が主流になりつつある。
加速コア1の動作領域は、通常、加速コア1の飽和磁束密度Bsの70〜90%程度であるから、大きい加速電圧を得るためには、加速コア1を図13の原点両振りで動作させるのが望ましい。
しかしこの方式では、直流磁界を重畳して透磁率を変化させているため、加速コア1の動作領域はBs−Bqの範囲となり大幅に狭くなってしまう。
それにも関わらず、一定の加速電圧を得ようとするため、加速コア1の断面積を増やす必要があり、結果として同調型RF加速空胴100は大型化している。
以上の説明で明らかになったように、従来の同調型RF加速空胴100は加速コア1に直流磁界を重畳してインダクタンスを変化させたため、種々の不都合を生じていた。
この発明の実施の形態1を図に基づいて説明する。図1(a)において、RF加速空胴100は加速コア1と加速電極ギャップ2と空胴外壁3と真空ダクト4とで構成される加速空胴本体50と、高周波電源5と前記加速空胴本体50の外部にあって、前記加速電極ギャップ2に並列に設けられたコア材を有するインダクタンス可変手段6によって構成されている。なお、荷電粒子ビームBは図1の左側より右側に進むものとする。
図1(b)は、RF加速空胴100を並列電気回路でモデル化したものを示す。Rpは加速コア1の抵抗成分でシャントインピーダンスを示し、Lpはインダクタンス成分を示す。Lvはインダクタンス可変手段6のインダクタンスを示し、Cは加速電極ギャップ2のキャパシタンスを示す。
この実施の形態1におけるRF加速空胴100は、加速コア1とは別個に同調用のインダクタンスをインダクタンス可変手段6として加速電極ギャップ2に並列に設け、前記インダクタンス可変手段6のインダクタンス量を変化させることで同調運転を可能とするものである。
加速空胴本体50内に装荷された加速コア1は、加速電極ギャップ2に誘導電界を発生させるための交流磁束の媒体であり、荷電粒子ビームBと鎖交しなければならない。すなわち、荷電粒子ビームBを鎖交するコアに発生した磁束がビームBを加速する電界を生成する。この際、インダクタンス可変手段6を用いて加速空胴本体50のインダクタンスを変化させれば、コアの透磁率を変化させる必要がないため、動作領域を0から飽和磁束密度までフルに利用できる。すなわち、比較的飽和磁束の小さいコア材料でも、十分大きな動作領域を確保することができるため、コア材料に対する制限が大幅に緩和される。
一方、インダクタンス可変手段6は、加速電極ギャップ2のキャパシタンスCとのLC共振周波数を調整するために存在し、ビームBの加速には寄与しない。このため、Q値の高いコア材を用いて、加速空胴本体50のインピーダンスの低下を抑制するのが望ましい。また、ビームBと鎖交するという条件がないため、インダクタンスを変化させる様々な手法が可能となる。さらに、形状や図示省略したコイルの巻き数を自由に選べるため、インダクタンス可変手段6に用いるコア材質に対する制限が大幅に緩和される。
以上のように、加速空胴本体50の加速電極ギャップ2に並列にインダクタンス可変手段6を設けることにより、加速空胴本体50のインピーダンスを高く出来るとともに、加速コア1のコア材およびインダクタンス可変手段6のコア材に要求される条件が大幅に緩和される。
前記平板状トロイダル磁性体8の厚さtは前記トロイダルコア7のギャップ7aのギャップ長aより小さい。またトロイダル磁性材8のy軸はトロイダルコア7のY軸に並行に設けられ、例えばモータによる駆動機構9によって図示のように回転する。なお、トロイダルコア7の幅W7=r2−r1と、トロイダル磁性体8の幅W8=r4−r3との関係はW7=W8、W7>W8またはW8>W7のいずれかが選択される。なお、テーパ形状を有することによるテーパ先端部の過熱は平板状トロイダル磁性体が回転することによる空冷効果により低減させることができる。
なお、この実施の形態1では加速電極ギャップ2のキャパシタンスCと並列に可変手段インダクタンス6を入れた例を示したが、図3(a)に示すように、可変インダクタンス成分をもつインピーダンス6aでも同様の効果を奏する。また、図1(a)に示した加速電極ギャップ2間に電極板を設けることによって図3(b)に示すように、キャパシタンスCを2分割したC1とC2とし、その一部に可変インダクタンスLvまたはインピーダンスZを入れてもよい。
この実施の形態2では、実施の形態1で示した実施例と同様、磁気抵抗を変化させてインダクタンスを変化させる方法を、図4について説明する。この構成では、ドーナツ状のコアを半分割し、その一方を固定側とし、他の片側を回転させで磁極ギャップを変化させたインダクタンス可変手段6aを実現している。
図4においてインダクタンス可変手段6aは、磁性材を用いたドーナツ状コアを半分割した半円状トロイダル固定コア10(コイルは図示省略)と、このトロイダル固定コア10と同軸上(X−X軸上)で回転可能なドーナツ状コアを半分割した半円状トロイダル回転コア11と、この半円状トロイダル回転コア11を回転駆動する回転駆動機構9とより構成されている。なお、半円状トロイダル固定コア10の端部10Eと、半円状トロイダル回転コア11の端部11E間には、ギャップ長aの磁極ギャップが設けてある。
このような構成のインダクタンス可変手段6aは半円状トロイダル固定コア10と半円状トロイダル回転コア11との間の磁極ギャップaの変化を大きくできるため、比較的μrの低い、例えばフェライト材でも数式7の(m/a<<μr)の条件を満たすことができる。
この形状で加速周波数変化パターン(インダクタンス変化パターン)を所望の形状にするためには、半円状トロイダル固定コア10の端面10Fに適当な磁極シムを取り付ければよい。
尚、この図4では、回転軸は横向きになっているが、垂直(磁極吊り下げがベター)にした方が、軸に重力による曲げ応力が生じず、滑らかな運転が可能となる。
また、この形状を有するインダクタンス可変手段6aにおいても、回転時の回転バランス、及び、空気抵抗を改善するため、図5に示すように外形が回転対称になるようなセラミック等の非磁性半球状回転バランサ12をトロイダル回転側コア11に設けたインダクタンス可変手段6bとすると滑らかな回転を得ることが出来る。
次に実施の形態3について述べる。円形加速器、例えばイオンシンクロトロンの荷電粒子加速周波数の繰り返し周波数が100Hzを越えるような場合には、前記実施の形態1、2に示したコアの回転による磁極ギャップの変化を得る構成は、回転駆動機構9の回転数上限の関係から実現が難しくなる。この課題を解決するため、実施の形態1の図2の平板状トロイダル磁性体8に代替して、1回の回転で複数の磁気抵抗変化が発生するような平板状トロイダル磁性体を設けたインダクタンス可変手段とすればよい。図6にこの実施の形態3によるインダクタンス可変手段6cを示す。図6において、トロイダルコア7は前記図2と同様である。平板状トロイダル磁性体8は、図1に示した平板状トロイダル磁性体8と同一の大きさの外半径r4、内半径r3、厚さtを有したドーナツ状をなしている。この平板状トロイダル磁性体8はフェライト等の磁性体8aとセラミック系の非磁性材8bとで構成されており、磁性材8aと非磁性材8bとがドーナツ状円周方向で交互に複数の鋸歯形状8dを周方向に順次周期的に組み合わせ形成して接着されている。図6に示す例の平板状トロイダル磁性体8は4個の鋸歯形状8dを備えているが、この数に限るものではない。
このような構成のインダクタンス可変手段6cにおいて、回転駆動機構9によって平板状トロイダル磁性体8を回転させると、円形加速器の加速周波数の変化パターンと同じ磁気抵抗の変化パターン(インダクタンス変化パターン)、つまり加速周波数変化パターンに合わせたRF加速空胴50と同調が可能となる。
実施の形態4を図7に基づいて説明する。この実施の形態4は、前記した実施の形態2の図4に示したインダクタンス可変手段6aのトロイダル回転コア11に代替して、多極化したトロイダル回転コアを設けたものである。
図7において、多極トロイダル回転コア11はドーナツ状コアを半分割したトロイダル回転コア11a、11bとが十文字状に接着されている。このような多極トロイダル回転コア11を回転駆動機構9によって回転させることにより、加速周波数の変化パターンに合わせたインダクタンス変化パターンがより容易に得られる。なお、このインダクタンス変化パターンの微調整は、固定コア10の端部10Fの磁極形状を変更する。例えば適当な磁極シムを取り付ければよい。
次に実施の形態5について述べる。この実施の形態5によるインダクタンス可変手段6は、図8(a)(b)に示すように固定インダクタンス13を加速電極ギャップ2に並列にかつ加速空胴本体50の外部に外付けコアとして設けた構成である。なお、この構成が有利になる条件は以下の通りである。
1.高い加速電圧を必要とするため、励磁磁束を大きくしたい。しかも、加速コアの設置スペースに制限があり、磁束密度を上げるため、高い飽和磁束密度を持つ加速コアが必要。
2.加速周波数帯域が狭く、RF加速空胴のQ=3〜9程度まで許容。
従来は特許文献3に示したように、同様の条件のRF加速空胴を実現するため、加速コアにギャップを設け、ギャップ幅を調整することで加速コアのインダクタンスを下げ、ある共振周波数におけるシャントインピーダンスを大きくすると共に、Q値の調整を行っていた。
この実施の形態5では前述した特許文献3の課題を解決するものであり、図8に示すように、加速電極ギャップ2に並列に固定インダクタンス13を接続することで、加速コアにギャップを設けるのと同等の効果を得ることができる。このように固定インダクタンス13を用いる場合は、加速コアにギャップを設ける必要がなく、かつ、インダクタンスを可変にする必要がないので、安価にRF加速空胴100を製作することができる。
加速コア1のインピーダンスをZ1=R1+iX1、外付けコア13のインピーダンスをZ2=R2+iX2とする。このとき、2つのコアの並列インピーダンスZ3=R3+iX3の各成分は下記数式8となる。
結局、RF加速空胴100のインピーダンスZ’p3は次式となる。
これは例えば前記特許文献3に示されるコアにギャップを設ける効果と同等であり、コアを切断する必要がない分だけ、安価に空胴を構成できる。
次に実施の形態6のインダクタンス可変手段6eを図9に基づいて説明する。
以上の実施の形態では、構造的、機構的にインダクタンスを変化させる場合であったが、この実施の形態6では、回路的にインダクタンスを変化させるものである。
図9に示すように、加速電極ギャップ2に並列に、例えばトロイダル状の空胴コア17が加速空胴本体50の外部に設けられているとともに、この空胴コア17に可変定電流電源16が設けられている。この可変定電流電源16を荷電粒子ビームを加速するための加速周波数の変化パターンに合わせてONすることによって空胴コア17インダクタンスを変化させるものである。
実施の形態1で説明したように、フェライトの特性は熱的に不安定なため、バイアス電流によるインダクタンス調整が難しい。しかし、この実施の形態6の図9に示す外付けインダクタンスに相当する空胴コアは設置場所に制約されることなく、また空胴外壁3を取り巻く必要がなく、サイズも自由に選べるため、冷却システムを容易に構成することができる。例えば、空胴コアのコア自体を冷媒に浸して液冷する構成も、簡単に実現することができ、熱的な安定性を向上させることができる。
さらに、加速コア1としてQ値の低いコア(Q=0.5)を用いる場合、数式10に示されるように、Q=20というロスの小さいフェライトを選んでも、RF加速空胴100全体としてはQ=4.4程度となり、共振の鋭さが小さくなる。別の言い方をすれば、パワーロスの小さい(Q値の大きい)フェライトを使用し、フェライトの発熱を抑制して温度変動を抑制すると共に、共振の鋭さを小さくして共振の安定性を向上させることによりこの実施の形態6における本方式の共振の不安定性を大幅に抑制することが可能となる。
なお、前記加速コア1材のQ値(μpQf)と、インダクタンス可変手段の磁性材のQ値が異なり、かつ前記加速コア材のQ値が前記インダクタンス可変手段の磁性材のQ値より小さいように選定するのは前記実施の形態1〜5および後述の実施の形態7に適用された場合にその効果を一層向上させるためである。
実施の形態7を図10に基づいて説明する。この実施の形態7のインダクタンス可変手段6fはインダクタンスを階段的に変化させて概同調させるものである。Q値が〜5程度のRF加速空胴なら、共振周波数f(数MHzを想定)に対し、f±0.25MHz程度まで、共振時の90%のインピーダンスを維持する。一方、通常の加速器における加速周波数の変化幅は、1〜5MHz程度である。これより、5MHzの加速周波数変化幅がある場合には、インダクタンスを10回離散的に変化させれば連続的に同調させた場合の90%のインピーダンスを維持することになる。
次に、インダクタンスを階段的に変化させる構成を図10について説明する。図10に示すように加速電極ギャップ2に並列に接続された、例えば3個の外付けインダクタンスに相当する空胴コア17a、17b、17cとそのそれぞれに接続された可変定電流電源16a〜16cおよびスイッチ20a〜20cが設けられている。スイッチ20a〜20cの加速周波数の変化パターンに合わせてONされることにより空胴コアにバイアス電流が流れるように構成されている。但し、バイアス電流はON、OFFの2つのモードしかなく、ONの場合には、外付けインダクタンス17a〜17cのコアが飽和し、透磁率が1に近い値になる。
このような構成を採用することで、空胴コアである外付けインダクタンス17a〜17cの数が1、2、3と変化し、インダクタンスを3倍変化させることが出来る。なお、空胴コアの数を3個としたが、これに限るものではない。
以上では、空胴のギャップに並列に設けたインダクタンスを、可変インダクタンスとして説明してきたが、固定インダクタンスを用いれば、空胴を、加速周波数帯域を狭く、高インピーダンスをもつ特性に変化させることができる。これは、特許文献3と同じ目的で、並列固定インダクタンスを調整することで、RF加速空胴のQ値を任意に調整できることを意味しており、同様のアプリケーションでは、コアの切断やギャップ調整機構を用いることなく、安価にQ値の調整が可能である。
以上述べた実施の形態1〜8の構成を備えたRF加速空胴100は、荷電粒子ビーム加速あるいは蓄積する円形加速器に適用すると、簡単な制御によって加速周波数とRF加速空胴との共振周波数の同調が容易に行うことができる。その結果、加速電圧の上昇、加速の安定性、加速エネルギやビーム電流値の上昇、さらには円形加速装置のコンパクト化等優れた効果を奏する。
7 トロイダルコア、8 平板状トロイダル磁性体、8a トロイダル磁性材、
8b トロイダル非磁性材、9 回転駆動機構、10 半円状トロイダル固定コア、
11 半円状トロイダル回転コア、12 半球状バランサ、
13 外付けコア(固定インダクタンス)、16a〜16c 可変定電流電源、
17a〜17c 空胴コア、20a〜20c スイッチ、50 加速空胴本体、
100 RF加速空胴。
Claims (15)
- 荷電粒子ビームを加速あるいは蓄積する円形加速器に用いられる高周波加速空胴であって、前記高周波加速空胴は、前記荷電粒子ビームを加速するための高周波電界を発生する加速電極ギャップおよび前記荷電粒子ビームの軌道をとりまく磁路を形成する加速コアが設けられた加速空胴本体と、前記加速電極ギャップに並列に接続され前記加速空洞本体の外部に配置された磁性体を有するインダクタンス可変手段とを備えており、前記荷電粒子を加速するための加速周波数の変化パターンに合わせて前記インダクタンス可変手段の生成するインダクタンスを変化させることにより、前記荷電粒子ビームの加速周波数と前記高周波加速空胴の共振周波数とを同調させることを特徴とする高周波加速空胴。
- 前記インダクタンス可変手段は、周方向にギャップが設けられたトロイダルコアと、該トロイダルコアと直交し、回転中心が前記トロイダルコア外周より離れた個所に配置された平板状トロイダル磁性体と、該平板状トロイダル磁性体の回転駆動機構とで構成されており、前記荷電粒子ビームを加速するための加速周波数の変化パターンに合わせて、前記平板状トロイダル磁性体が前記回転駆動機構によって回転駆動され、前記トロイダルコアのギャップ内を回転通過して前記インダクタンス可変手段の生成するインダクタンスを変化させることにより、前記荷電粒子ビームの加速周波数と前記高周波加速空胴の共振周波数とを同調させることを特徴とする請求項1に記載の高周波加速空胴。
- 前記平板状トロイダル磁性体は、トロイダル磁性材とトロイダル非磁性材とで構成されており、前記トロイダル磁性材およびトロイダル非磁性材はともに、板厚方向において所定の角度傾斜したテーパ面が形成されているとともに、該テーパ面を互いに接するよう組み合わせて一体化し、平板状トロイダル磁性体が形成されていることを特徴とする請求項2に記載の高周波加速空胴。
- 前記平板状トロイダル磁性体は、トロイダル磁性材とトロイダル非磁性材とで構成されており、前記トロイダル磁性材およびトロイダル非磁性材はともに、トロイダル周方向に複数個分割されているとともに、板厚方向の断面形状が鋸歯状をなし、前記トロイダル磁性材の鋸歯状の山と谷が、前記トロイダル非磁性材の谷と山とに周方向に順次周期的に互いに組み合わされて一体化し、平板状トロイダル磁性体が形成されていることを特徴とする請求項2に記載の高周波加速空胴。
- 前記インダクタンス可変手段は、半円状トロイダル固定コアと、該半円状トロイダル固定コアと所定のギャップ長を介するとともに、同軸上で回転可能に配置された半円状トロイダル回転コアと、該半円状トロイダル回転コアの回転駆動機構とで構成されており、前記荷電粒子ビームを加速するための加速周波数の変化パターンに合わせて前記回転駆動機構によって前記半円状トロイダル回転コアが回転駆動され、前記インダクタンス可変手段の生成するインダクタンスを変化させることにより、前記荷電粒子ビームの加速周波数と前記高周波加速空胴の共振周波数とを同調させることを特徴とする請求項1に記載の高周波加速空胴。
- 前記半円状トロイダル回転コアには、該半円状トロイダル回転コア全体を覆う非磁性材の半球状回転バランサが設けられていることを特徴とする請求項5に記載の高周波加速空胴。
- 前記インダクタンス可変手段は、半円状トロイダル固定コアと、該半円状トロイダル固定コアに所定のギャップ長を介するとともに同軸上に回転可能に配置され、2個の半円状トロイダル回転コアが互いに90°直交して形成された多極トロイダル回転コアと、該多極トロイダル回転コアの回転駆動機構とで構成されており、前記荷電粒子ビームを加速するための加速周波数の変化パターンに合わせて前記回転駆動機構によって前記多極トロイダル回転コアが回転駆動され、前記インダクタンス可変手段の生成するインダクタンスを変化させることにより、前記荷電粒子ビームの加速周波数と前記高周波加速空胴の共振周波数とを同調させることを特徴とする請求項1に記載の高周波加速空胴。
- 荷電粒子ビームを加速あるいは蓄積する円形加速器に用いられる高周波加速空胴であって、前記高周波加速空胴は前記荷電粒子ビームを加速するための高周波電界を発生する加速電極ギャップおよび前記荷電粒子ビーム軌道をとりまく磁路を形成する加速コアが設けられた加速空胴本体と、前記加速電極ギャップに並列に接続され前記加速空洞本体の外部に配置された固定インダクタンスとを備えており、前記固定インダクタンスの寸法を選定することにより、前記荷電粒子ビームの加速周波数と前記高周波加速空胴の共振周波数とを同調させることを特徴とする高周波加速空胴。
- 前記インダクタンス可変手段は、空胴コアと可変定電流電源とで構成されており、前記荷電粒子ビームを加速するための加速周波数の変化パターンに合わせて前記可変定電流電源によって前記空胴コアにバイアス磁界が印加され、前記インダクタンス可変手段の生成するインダクタンスを変化させることにより、前記荷電粒子ビームの加速周波数と前記高周波加速空胴の共振周波数とを同調させることを特徴とする請求項1に記載の高周波加速空胴。
- 前記インダクタンス可変手段は、複数の空胴コアが直列に設けられ、該空胴コアにそれぞれ設けられた可変定電流電源およびスイッチとで構成されており、前記荷電粒子ビームを加速するための加速周波数の変化パターンに合わせて前記各スイッチがONされることによって前記空胴コアにバイアス磁界が印加され、前記インダクタンス可変手段の生成するインダクタンスを変化させることにより、前記荷電粒子ビームの加速周波数と前記高周波加速空胴の共振周波数とを同調させることを特徴とする請求項1に記載の高周波加速空胴。
- 前記インダクタンス可変手段は、複数の空胴コアが直列に設けられ、前記複数の空胴コアの隣り合う空胴コア間の回路上にはスイッチが設けられており、前記荷電粒子ビームを加速するための加速周波数の変化パターンに合わせて前記スイッチがONされ、前記インダクタンス可変手段の生成するインダクタンスを変化させることにより、前記荷電粒子ビームの加速周波数と前記高周波加速空胴の共振周波数とを同調させることを特徴とする請求項1に記載の高周波加速空胴。
- 前記加速コア材のμpQf値と、前記インダクタンス可変手段の磁性材のμpQf値とが異なり、かつ、前記加速コア材のμpQf値が前記インダクタンス可変手段の磁性体のμpQf値より小さいことを特徴とする請求項1に記載の高周波加速空胴。
- 前記加速コア材のμpQf値と、前記固定インダクタンスの磁性材のμpQf値とが異なり、かつ、前記加速コア材のμpQf値が前記固定インダクタンスの磁性体のμpQf値より小さいことを特徴とする請求項8に記載の高周波加速空胴。
- 荷電粒子ビームを加速あるいは蓄積する円形加速器に用いられる高周波加速空胴であって、前記高周波加速空胴は、前記荷電粒子ビームを加速するための高周波電界を発生する加速電極ギャップおよび前記荷電粒子ビームの軌道をとりまく磁路を形成する加速コアとが設けられた加速空胴本体と、前記加速電極ギャップに並列に接続され前記加速空洞本体の外部に配置されたインダクタンスとを備えることを特徴とする高周波加速空胴。
- 請求項1、8、14のいずれか1項に記載の前記高周波加速空胴を備え、荷電粒子ビームを加速あるいは蓄積することを特徴とする円形加速器。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005260112A JP4485437B2 (ja) | 2005-09-08 | 2005-09-08 | 高周波加速空胴および円形加速器 |
| US11/452,999 US7741781B2 (en) | 2005-09-08 | 2006-06-15 | Radio-frequency accelerating cavity and circular accelerator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005260112A JP4485437B2 (ja) | 2005-09-08 | 2005-09-08 | 高周波加速空胴および円形加速器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007073391A JP2007073391A (ja) | 2007-03-22 |
| JP4485437B2 true JP4485437B2 (ja) | 2010-06-23 |
Family
ID=37829208
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005260112A Expired - Fee Related JP4485437B2 (ja) | 2005-09-08 | 2005-09-08 | 高周波加速空胴および円形加速器 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7741781B2 (ja) |
| JP (1) | JP4485437B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4674367B2 (ja) * | 2006-12-12 | 2011-04-20 | 国立大学法人大阪大学 | 高速励磁装置及び円形加速器 |
| JP5638457B2 (ja) * | 2011-05-09 | 2014-12-10 | 住友重機械工業株式会社 | シンクロサイクロトロン及びそれを備えた荷電粒子線照射装置 |
| CN107430924B (zh) | 2015-05-15 | 2019-09-10 | 哈里伯顿能源服务公司 | 用于具有特定空间约束的工具的几何可配置的多芯电感器和方法 |
| CN106231774B (zh) * | 2016-07-29 | 2018-10-09 | 中国原子能科学研究院 | 一种带有补偿电容的高频腔体及其工作频率调节方法 |
| WO2018127990A1 (ja) * | 2017-01-05 | 2018-07-12 | 三菱電機株式会社 | 円形加速器の高周波加速装置及び円形加速器 |
| JP7402880B2 (ja) * | 2018-12-13 | 2023-12-21 | ディーエイチ テクノロジーズ デベロップメント プライベート リミテッド | 開始静電線形イオントラップ |
| CN112449475B (zh) * | 2020-12-08 | 2023-07-25 | 中国工程物理研究院流体物理研究所 | 一种直线感应加速腔结构 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61150204A (ja) * | 1984-12-24 | 1986-07-08 | Nec Corp | 電流制御型可変インダクタ |
| JPS63193499A (ja) * | 1987-02-04 | 1988-08-10 | Hitachi Ltd | 四重極粒子加速器 |
| JPH03245499A (ja) * | 1990-02-21 | 1991-11-01 | Hitachi Ltd | 四重極粒子加速器 |
| JPH09161997A (ja) * | 1995-12-14 | 1997-06-20 | Hitachi Ltd | 高周波加速装置およびそれを用いた環状加速器 |
| JP2000077200A (ja) * | 1998-08-31 | 2000-03-14 | Hitachi Ltd | 高周波加速装置及び環状型加速器 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3174278A (en) * | 1963-01-24 | 1965-03-23 | Raymond L Barger | Continuously operating induction plasma accelerator |
| US4801847A (en) * | 1983-11-28 | 1989-01-31 | Hitachi, Ltd. | Charged particle accelerator using quadrupole electrodes |
| US4712042A (en) * | 1986-02-03 | 1987-12-08 | Accsys Technology, Inc. | Variable frequency RFQ linear accelerator |
| JPH076900A (ja) | 1993-06-15 | 1995-01-10 | Hitachi Ltd | 高周波加速空胴及びイオンシンクロトロン加速器 |
| JPH07161500A (ja) | 1993-12-07 | 1995-06-23 | Hitachi Ltd | 高周波加速空胴及びイオンシンクロトロン |
| JP3054712B1 (ja) | 1999-10-26 | 2000-06-19 | 高エネルギー加速器研究機構長 | 高周波加速空胴及び高周波加速空胴の制御方法 |
| JP3961925B2 (ja) * | 2002-10-17 | 2007-08-22 | 三菱電機株式会社 | ビーム加速装置 |
| US7196337B2 (en) * | 2003-05-05 | 2007-03-27 | Cabot Microelectronics Corporation | Particle processing apparatus and methods |
-
2005
- 2005-09-08 JP JP2005260112A patent/JP4485437B2/ja not_active Expired - Fee Related
-
2006
- 2006-06-15 US US11/452,999 patent/US7741781B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61150204A (ja) * | 1984-12-24 | 1986-07-08 | Nec Corp | 電流制御型可変インダクタ |
| JPS63193499A (ja) * | 1987-02-04 | 1988-08-10 | Hitachi Ltd | 四重極粒子加速器 |
| JPH03245499A (ja) * | 1990-02-21 | 1991-11-01 | Hitachi Ltd | 四重極粒子加速器 |
| JPH09161997A (ja) * | 1995-12-14 | 1997-06-20 | Hitachi Ltd | 高周波加速装置およびそれを用いた環状加速器 |
| JP2000077200A (ja) * | 1998-08-31 | 2000-03-14 | Hitachi Ltd | 高周波加速装置及び環状型加速器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007073391A (ja) | 2007-03-22 |
| US20070051897A1 (en) | 2007-03-08 |
| US7741781B2 (en) | 2010-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8525448B2 (en) | Circular accelerator and operating method therefor | |
| US7741781B2 (en) | Radio-frequency accelerating cavity and circular accelerator | |
| JP2006516876A (ja) | 低損失材料を使用する高効率高速電気機器 | |
| US20040175953A1 (en) | Apparatus for generating planar plasma using concentric coils and ferromagnetic cores | |
| US6548809B2 (en) | Electromagnetic device for production of cold neutral atoms | |
| JP2009512985A (ja) | 連続パルス進行波加速器 | |
| US9247630B2 (en) | Surface-micromachined micro-magnetic undulator | |
| JP7405994B2 (ja) | 非対称な輪郭を有する共振器コイル | |
| JP2016506626A (ja) | 誘導鉄心 | |
| JPH07307132A (ja) | ジャイロトロン装置 | |
| JP4534005B2 (ja) | 高周波加速空洞及び装置 | |
| KR20170062185A (ko) | 고출력 마그네트론에서의 자기장 형성 장치 | |
| WO2018180202A1 (ja) | 円形加速器 | |
| JP2011045211A (ja) | ステッピングモータ | |
| JP3102784B2 (ja) | 磁場可変マグネット | |
| JP3054712B1 (ja) | 高周波加速空胴及び高周波加速空胴の制御方法 | |
| JP3117373B2 (ja) | ジャイロトロン用磁場発生装置 | |
| JP2003142300A (ja) | 周期磁場発生装置 | |
| JPH0787118B2 (ja) | 四重極粒子加速器 | |
| JP2001338799A (ja) | 高周波加速空胴及び円形加速器 | |
| JP2009187678A (ja) | 電力フィーダ | |
| JP2001338589A (ja) | 電子サイクロトロン共鳴イオン源 | |
| Ahmad et al. | Performance and design comparison of moving-magnet linear oscillating actuators based on their mover positions | |
| JP2001291600A (ja) | 磁場可変マグネット | |
| JPH09190770A (ja) | ジャイロトロン用磁場発生装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061227 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090324 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090521 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100323 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100324 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130402 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130402 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140402 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |