JP3874256B2 - 両面印刷システムおよび方法 - Google Patents
両面印刷システムおよび方法 Download PDFInfo
- Publication number
- JP3874256B2 JP3874256B2 JP2002056494A JP2002056494A JP3874256B2 JP 3874256 B2 JP3874256 B2 JP 3874256B2 JP 2002056494 A JP2002056494 A JP 2002056494A JP 2002056494 A JP2002056494 A JP 2002056494A JP 3874256 B2 JP3874256 B2 JP 3874256B2
- Authority
- JP
- Japan
- Prior art keywords
- web
- mark
- printing
- web conveyance
- conveyance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/22—Apparatus for electrographic processes using a charge pattern involving the combination of more than one step according to groups G03G13/02 - G03G13/20
- G03G15/23—Apparatus for electrographic processes using a charge pattern involving the combination of more than one step according to groups G03G13/02 - G03G13/20 specially adapted for copying both sides of an original or for copying on both sides of a recording or image-receiving material
- G03G15/231—Arrangements for copying on both sides of a recording or image-receiving material
- G03G15/238—Arrangements for copying on both sides of a recording or image-receiving material using more than one reusable electrographic recording member, e.g. single pass duplex copiers
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/00016—Special arrangement of entire apparatus
- G03G2215/00021—Plural substantially independent image forming units in cooperation, e.g. for duplex, colour or high-speed simplex
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/00362—Apparatus for electrophotographic processes relating to the copy medium handling
- G03G2215/00443—Copy medium
- G03G2215/00451—Paper
- G03G2215/00455—Continuous web, i.e. roll
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Handling Of Sheets (AREA)
- Controlling Rewinding, Feeding, Winding, Or Abnormalities Of Webs (AREA)
- Paper Feeding For Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
- Dot-Matrix Printers And Others (AREA)
- Counters In Electrophotography And Two-Sided Copying (AREA)
Description
【発明の属する技術分野】
本発明は、ウェブの表面と裏面の両面に画像等を形成する両面印刷システムに関するものである。
【0002】
【従来の技術】
長尺に連続した帯状の用紙に代表されるウェブの両面に画像等を形成する印刷システムとして、2台の印刷装置を直列に配置し、前段の印刷装置(以下第1印刷装置という)でウェブの第1の面(表面)に印刷を行ない、この第1印刷装置から排出されたウェブを反転装置にて表裏反転させた後、ウェブを後段の印刷装置(以下第2印刷装置という)に送り込み、その第2印刷装置でウェブの第2の面(裏面)に印刷を行うようにした印刷システムが提案され、実用化されている。
【0003】
このような印刷システムに用いられるウェブとしては、両縁に送り孔を備えた形態の連続紙と、送り孔を持たないウェブの二種類あり、その何れにも対応可能な印刷システムが普及しつつある。しかしながら、送り孔を持たないウエブを用いた場合は、表面と裏面に形成される画像の位置あわせが難しくなるという問題を生じる。
【0004】
すなわち、上記のような印刷システムにおいて、第1の印刷装置が電子写真方式を用いて画像を形成するタイプの印刷装置である場合、ウェブ上に転写された画像(トナー像)をウェブに溶融定着させるための熱定着工程での熱作用により、第2の印刷装置に送り込まれるウェブは当初の状態よりも熱収縮してしまう。
【0005】
したがって表面印刷時のページ長と、裏面印刷時のページ長とが異なるため、ウェブ上に形成された表面側の画像位置と裏面側の画像位置とが揃わなくなることが多々生じるのである。
【0006】
このような問題に対処するため、第1印刷装置でウェブの所定位置に位置合わせマークを形成し、第2印刷装置で位置合わせマークの間隔又はタイミングを計測し、この計測結果からウェブの搬送速度を制御することによって表面側の画像位置と裏面側の画像位置とを揃える制御システムを本発明者は先に提案した(特願2000−389699号)。
【0007】
【発明が解決しようとする課題】
ところで、上記のような制御方式においては、印刷開始時にウェブの搬送を開始した時点からマークセンサが、最初の位置合わせマークを検出する時点までの期間は位置合わせ制御を行うことはできない。このため、例えば1ページだけ印刷動作を行う場合は、位置合わせの制御期間が極めて短いため、表面側の画像位置と裏面側の画像位置とを揃える動作が完了する前に制御が打ち切られてしまい、最終的に表面側の画像位置と裏面側の画像位置の位置ずれを解消できないという現象を生じる。そしてこのように位置合わせの制御が途中で打ち切られる現象が連続すると、表面側の画像位置と裏面側の画像位置とのずれが累積し、次第に位置ずれが大きくなってしまうという問題を生じる。
【0008】
本発明の目的は上述のような問題を解決した両面印刷システムを提供することにある。具体的には本発明は、印刷開始時においてまだ最初の検出マークが検出されるまでの期間であっても第1の面の画像と第2の面の画像との位置合せの制御を行うことができる両面印刷システムを提供することを目的とする。
【0009】
本発明の他の目的は、極めて短期間に第1の面の画像と第2の面の画像との位置合わせを正確に行うことができる制御装置を備えた両面印刷システムを提供することにある。
【0010】
【課題を解決するための手段】
上記の目的は、ウェブの第1の面に画像を形成する第1印刷装置(P1)と、第1印刷装置の後段に設けられ前記ウェブの第2の面に画像を形成する第2印刷装置(P2)と、第1印刷装置と第2印刷装置の間に設けられ、第1印刷装置から送り出された前記ウェブの表裏を反転させる反転装置(T)とを有し、少なくとも第1印刷装置は、前記ウェブの予め指定された位置に位置合せマーク(Rm)を形成するマーク形成手段を有し、少なくとも第2印刷装置は、第1印刷装置で形成された前記位置合せマークを検出するマーク検出手段(16)と、該マーク検出手段からのマーク検出信号に基づいて前記ウェブの搬送速度を制御する制御手段(20)とを有する印刷システムにおいて、
前記制御手段は、露光タイミングに同期して発生するウェブ搬送制御信号(CPF−N)の発生から所定時間経過後に前記ウェブの搬送を開始するウェブ搬送開始タイミング制御手段(23,211,242)と、前記マーク検出手段が前記位置合せマークを検出する毎にウェブの搬送速度に関連する情報を記憶する記憶手段(213)を有し、
前記ウェブ搬送開始タイミング制御手段は、前記記憶手段に記憶された過去のウェブ搬送速度の情報に基づいてウェブ搬送を開始するタイミングを制御するとともに、
前記制御手段は、ウェブ搬送を開始した時点から、前記マーク検出手段が最初の位置合せマークを検出するまでの期間を前記記憶手段に記憶された過去のウェブ搬送速度の情報に基づいて前記ウェブの搬送速度を制御することにより達成される。
【0012】
【発明の実施の形態】
以下、本発明の実施例について図面を参照しながら説明する。はじめに図1を用いて本発明印刷システムに適用される電子写真式印刷装置の一実施例について説明する。同図において、Wはウェブであり、通常は紙であることが多いが、必ずしも紙に限られず、プラスティックフィルムなどが用いられる場合もある。ウェブWは、給送装置(図示せず)から印刷装置Pの内部に送り込まれ、ガイドローラ1に案内されてウェブバッファ機構2に搬送される。
【0013】
ウェブバッファ機構2は、搬送されるウェブWを一時的に蓄える蓄積部2aと、ウェブWの弛み量(バッファ量)を検出する複数の光学的センサ2d,2e,2f,2gと、ウェブ搬送方向の上流部に設けられた1対のローラ2b,2cとを備えている。ローラ2cには、ローラ2bへの圧接力を調節するための調節機構が装備されている。本実施例においては、ローラ2cの一端から突出した軸2hに錘2iを摺動可能に設け、この錘2iの位置を変えることによりてこの原理でローラ2cの2dに対する圧接力を調節している。このウェブバッハ機構2自体は、本発明と直接関係ないので説明は省略するが、特願2000−389699に詳細に記載されている。
【0014】
ガイド部材3を通過したウェブWは、次に異物除去機構4に送り込まれる。異物除去機構4には、固定して設けられたシャフト4a,4bと4c、4dが設けられている。シャフト4aと4bは予め設定された極めて狭い間隔をなして設けられ、異物の侵入を阻止する役目を有する。
【0015】
ウェブWはさらに張力付与機構5に搬送される。この張力付与機構5は駆動原を持たないドラム5aと、このドラム5aに圧接して設けられたローラ5bとウェブ搬送上において移動可能に支持されたドラム5cとから構成されている。ドラム5は、回動可能に支持されたアーム5dの自由端に固定されており、バネ5eによってウェブWの面に付勢されている。上記張力付与機構5を設けることによってウェブWの張力が一定に保たれるようになる。
【0016】
さらに、ウェブWは、ガイドシャフト6、ガイド板7を経て、搬送ローラ8,9によって印写部10へ送り込まれる。印写部10としてこの実施例では電子写真記録方式による印写装置が用いられているが、本発明はこの方式の記録装置に限定されるものでない。像担持体として例示される感光体ドラム101が回転を開始すると、コロナ帯電器102に高電圧が印加され、感光体ドラム101表面は均一に例えば正電荷が帯電される。半導体レーザや発光ダイオードなどで構成された光源103から出力された光は、感光体ドラム101上を像露光し、感光体ドラム101上に静電潜像を形成する。この静電潜像を保持した感光体ドラム領域が現像装置104と対向する位置に到達すると、静電潜像に現像剤が供給され、感光体ドラム101上にトナー像が形成される。感光体ドラム101上に形成されたトナー像は、ウェブWの背面側にトナー像と逆極性の電荷を付与する転写器105の作用によってウェブW上に吸引される。感光体ドラム101の転写位置を通過した領域は、清掃装置106で清掃され、次の印刷動作に備えられる。
【0017】
上記のようにして印写部10からトナー像が転写されたウェブWは、搬送ベルト11によって後段へと搬送されて行く。搬送ローラ8は駆動源を持つ駆動ローラとして設けられており後述するモータによって駆動される。搬送ローラ9はバネ9aの弾性力によってウェブWを介して搬送ローラ8に圧接された従動ローラとして設けられている。また、搬送ベルト11は、駆動ローラ11aと従動ローラ11bに掛け渡して支持されるとともに、吸引装置(図示せず)を備えた構成となっており、ウェブWの背面を搬送ベルト11上に吸着させた状態で搬送するように構成されている。
【0018】
搬送ベルト11から送り出されたウェブWは、バッファプレート12を経て定着装置13に搬送される。定着装置13に到達したウェブWは、プレヒータ13aで予熱された後、加熱ローラ13bと加圧ローラ13cからなる一対の定着ローラによって形成されるニップ部によって加熱加圧されながら挟持搬送され、トナー像がウェブWに溶融定着される。
【0019】
加熱ローラ13bと加圧ローラ13cによって送り出されてきたウェブWは、送出しローラ14を経るとともに、通常は、スイングフィン15の振り子動作によって交互に折り分けられ、印刷装置P内で折りたたまれて積み重ねられる。これに対し、第1の印刷装置Pの後段にもう1台の第2印刷装置を配置する印刷システムにおいては、加熱ローラ13bと加圧ローラ13cによって送り出されてきたウェブWは、送出しローラ14を経て図1に破線で示すように印刷装置Pの外へと排出され、2台目の印刷装置(図示せず)に向けて搬送される。
【0020】
符号13dはウェブWの蛇行を検出するセンサである。また、符号16は、ウェブWに形成された位置合せマークを検出するマーク検出手段(マークセンサ)を示している。マークセンサ16は特に後段に配置される第2印刷装置において必須とされるものである。前段の第1印刷装置にてウェブWの表面に画像印刷を行う際に、例えばページ先頭端位置に位置合わせマークを印刷する。後段の第2印刷装置はこの位置合せマークを検出し、ウェブWの裏面に印刷される画像と、第1印刷装置でウェブWの表面に印刷された画像とが正確に位置合わせできるように制御する。
【0021】
図2は本発明に係る両面印刷システムの全体構成の一実施例を示す。本印刷システムは図1で説明した構成を有する2台の印刷装置P1,P2と、両印刷装置に接続された制御装置17とから構成される。そして第1の印刷装置P1から送り出されてきたウェブWの表裏は、反転装置Tによって反転され、その後、第2の印刷装置P2に送り込まれて、ウェブWの第2の面にも画像が形成される。
【0022】
1台目の印刷装置P1において、ウェブW上には図3に示すように印刷データに基づく画像Imが印刷されるとともに、各ページの先頭端に位置合せマーク(トナーマーク)Rmが印刷される。なお、位置合せマークを形成する手段は、画像Imを形成する装置と兼用してもよいし、独立させて別に設けてもよい。この実施例では画像形成手段と兼用し、感光体ドラム101上に画像Imを形成する際に一緒に形成している。
【0023】
第1の印刷装置P1から排出されたウェブWは、反転装置Tにて表裏が反転された上で第2の印刷装置P2へ送り込まれる。反転装置TによるウェブWの表裏反転により、トナーマークRmを保持した側のウェブ面(第1の面)は、マークセンサ16の検出面と対向するようになり、また、白紙状態のウェブ面(第2の面)は感光体ドラム101表面と対向するようになる。
【0024】
第1印刷装置P1の光源103により、感光体ドラム101上にページ先頭を示す情報が形成されると、その先頭マークの形成タイミングと同期したウェブ搬送制御信号(以下図面ではCPF−Nで表わす)がコントローラ17によって形成される。同様に第2印刷装置P2の光源103はP1とは独立したタイミングで露光を開始し、この露光タイミングでウエブ搬送信号(CPF-N)を発生する。P1のウェブ搬送制御信号と、P2のウェブ搬送制御信号は発生するタイミングは独立であるが、その間隔は等しい。なお、レーザ光の発生に同期したパルスを形成すること自体は公知であるのでコントローラ17の詳細は示していない。コントローラ17で生成されたウェブ搬送制御信号(CPF−N)は,それぞれ第1印刷装置、第2印刷装置に送られ、後述するように、この信号を基にしてウェブWの速度を制御するモータの制御信号がつくられる。
【0025】
第2印刷装置P2には図4に示すような別のコントローラ20が設けられており、この装置によりモータの速度制御信号がつくられ、そのモータにより例えばローラ8(図1)が駆動されるためウェブWの速度が制御されることになる。上記コントローラ20にはマイコン21が搭載され、図5に示すプログラムによって制御される。これらの詳細を説明するまえに、まず、ウェブの位置合わせ制御の動作原理を説明する。
【0026】
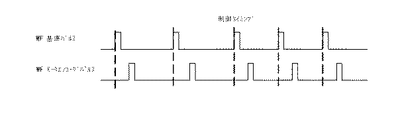
位置合わせ制御の説明図である図7において、感光ドラム101上の位置EPが露光ポイントであり、第1印刷装置ではここで先頭のマークが形成される。レーザ等の光源103(図1)により先頭マークが形成されるたびに図8に示すウェブ搬送制御信号(CPF−N)がつくられる。また、感光体ドラム101は予め設定されたプロセス速度で定速回転するように制御されているため、感光体ドラム101上におけるページ先頭は、上記ウェブ搬送制御信号の一周期毎、すなわちCPF長毎に転写ポイントTPに到達することになる。従って、第2印刷装置においてコントローラ17からのウェブ搬送制御信号(CPF−N)の発信タイミングと、マークセンサ16がトナーマークRmを検出するタイミングとの位相差が一定になるようにウェブ搬送速度を制御することにより、感光体ドラム101上のページ先頭と、ウェブWのページ先頭とを転写ポイントTPで高精度に一致させることが可能となる。
【0027】
本実施例では、図7に示すように転写器105による転写ポイントTPから露光ポイントEPまでの感光体ドラム表面上での距離をL1とし、転写ポイントTPからマークセンサ16による検出ポイントDPまでのウェブ搬送路上における距離をL2としている。ここで、感光体ドラム101上に仮想的に設定されるページ先頭PPと、ウェブWのページ先頭を表すトナーマークRmとが転写ポイントTPで一致する関係にてウェブ搬送が行なわれている状態を想定した時、トナーマークRmがマークセンサ16に検出されるタイミングを本明細書では制御タイミングと称することにする。このように定義すると、位置合わせを行なうということは、マークセンサ16によりトナーマークRmを検出するタイミング、つまり図8のマークセンサ信号を常に制御タイミングと一致するように制御することに他ならない。
【0028】
いま、露光ポイントEPにおいて先頭マークが形成され、これが転写ポイントTPにいたるまでの時間t0は、図8ではウェブ搬送制御信号(CPF−N)の立下りから転写ポイントと表示された時点までの時間に相当し、L1/Vpであらわされる。ただしVpはプロセス速度、つまり感光体ドラム101の回転速度である。
【0029】
一方、トナーマークRmがセンサ16により検出されてから転写ポイントTPにいたる時間tは図8では、マークセンサ信号から転写ポイントまでの時間であり、L2/Vwであらわされる。ただしVwはウェブWの走行速度である。したがってマーク時間、つまり図8でCPF−Nの立下りからマークセンサ信号までの時間tmは(t0−t)であらわされる。 さらに、CPF−Nの立下りから制御タイミングまでの時間t1は次式で与えられる。
t1=(L1−L2)/vp … 式(1)
表裏の先頭の位置を合わせるということは、マーク時間tmを上記のt1に一致させることであるから、マークセンサ16で信号を検出する毎に式(1)を計算してt1とのずれ量を把握し、そのずれ(偏差)が0になるように制御をすればよい。換言すれば、この制御タイミングとマークセンサ信号の検出タイミングとのずれ時間から、表面のページ先頭に対し裏面に印刷するページ先頭がどの程度ずれているかを把握し、トナーマークRmの検出タイミングが、前記制御タイミングよりも遅い場合はウェブ搬送速度を加速させる。逆にトナーマークRmの検出タイミングが制御タイミングよりも早い場合はウェブ搬送速度を減速する。そして、トナーマークRmを検出するタイミングが制御タイミングと一致するようにウェブ搬送速度を制御するのである。
【0030】
しかるに、上記の制御方法では、最初のトナーマークRmがセンサ16によって検出されるまでは位置合わせの制御が開始されない。すなわち最初の期間は無制御状態になってしまうわけである。
【0031】
この欠点を解消するために、本発明では印刷装置のコントローラ20に、トナーマークRmを検出する毎に、マーク時間(CPF−Nの立ち下がりからトナーマークRmを検出するまでの時間)を検出し、記憶する手段を備えている。そして、最初のトナーマークが検出されるまでの期間は、過去のウェブ搬送速度の情報を使用して、この期間のウェブ搬送速度を過去の搬送速度とする事で、表面の印刷位置に対する裏面の印刷位置のずれを最小に抑えている。
【0032】
以下、本発明の実施例について図4、図5、図6を参照しながら詳細に説明する。図4は少なくとも第2の印刷装置に設けられるコントローラ20の詳細を示し、図5はそのコントローラ20のマイコン部21が実行するプログラムを示す。また図6はマイコン部21のメモリに格納されるテーブルの一例を示す。
【0033】
前述したように、コントローラ17は、第2の印刷装置P2の露光タイミングに同期してウェブ搬送制御信号(図8のCPF−N)を発生する。この信号は第2の印刷装置P2に供給される。第2の印刷装置P2は、マイコン部21、マーク信号処理部22、ウェブ搬送モータ処理部23、CPF信号処理部24とから構成される。
【0034】
ウェブ搬送制御信号(CPF−N)は信号処理部24の波形成形回路241に供給され、2つの信号がつくられる。ひとつは図8に示すウェブ搬送制御タイミング信号(CPF_LEG−P)である。この信号はウェブ搬送制御信号(CPF−N)のタイミング情報のみを取り出すためにパルス幅を極めて小さく成形することによりつくられる。他のひとつは第1回目のウェブ搬送制御信号(CPF−N)の立下りに同期した信号である。この二つの信号はI/O装置243を通してマイコン部21に取り込まれる。マイコン部21からは、予め定められたカウント値がカウンタ242に格納される。そして1回目のウェブ搬送制御信号(CPF−N)の立下りのタイミングで、クロックによりカウントダウンの動作が開始される。カウント値が0になるとカウンタ242は出力パルスを発生し、これがウェブ搬送モータ制御部23に加えられる。この出力パルスは、ウェブ搬送制御信号(CPF−N)の立下りからCPU211が指定した時間後に発生し、後段の回路でモータ233の動作を開始するタイミングを決定するために用いられる。
【0035】
一方、マーク信号処理部22は、図8に示したマーク時間tmを計測する機能を有する。I/O装置223を通してウェブ搬送制御信号(CPF−N)の立下りに同期した信号がフリップフロップ221のセット端子Sに印加され、マークセンサ16からマークセンサ信号(図8)がリセット端子Rに加えられる。そしてカウンタ222はその期間のクロックを計数する。つまり、ウェブ搬送制御信号(CPF−N)の立下りからマークセンサ信号が発生するまでの時間情報が計測され、この情報がCPU211に取り込まれる。
【0036】
ウエブ搬送モータ制御部23はCPU211の指定した速度でウェブ搬送モータ233を回転させる機能を有する。CPU211から予め所定の値がカウンタ231にセットされる。制御の開始を示すカウンタ242の出力パルスが入ったタイミングからカウンタ231のカウント値をクロックでカウントダウンする。そしてカウント値が0になるとカウンタ231は出力パルスを発生する。つまり、カウンタ231の出力パルスの周波数は、CPU211からの設定値により任意に変えることができる。ウェブ搬送モータ233は、例えば図1のローラ8に結合されウェブWの搬送速度を制御するために用いられる。そのモータ233の回転速度に応じたパルスがエンコーダ234により発生されて、このエンコーダパルスがパルス比較器232により、基準パルスと比較される。
【0037】
図9は比較器232に加えられる2つのパルスの関係を示している。カウンタ231の出力パルスがWF基準パルスとしてあらわされ、エンコーダ234の出力パルスがWFモータエンコーダパルスとしてあらわされている。パルス比較器232により、エンコーダパルスが基準パルスに追従するように制御されるため、カウンタ値に応じてモータの速度を制御することが可能になる。
【0038】
マイコン部21の固定記憶装置(以下ROMという)には図5に示すようなプログラムが格納されている。ランダムアクセスメモリ(以下RAMという)213にはプログラムの実行過程で生じる変数等が格納される。
【0039】
次に、図5を用いて本発明の制御方法の一実施例について説明する。まず、ステップ301において、ウェブ搬送制御タイミング信号(図8のCPF_LEG−P)が発生したかどうかをCPU211で判定する。発生するとステップ302で、マーク時間(図8)を計測するために、マーク検出時間計測カウンタ222が計測を開始する。ステップ303でマークセンサ信号(図8)が発生したかどうかを判定し、発生すれば、ウェブ搬送制御タイミング信号からマークセンサ信号までの期間のカウント値、つまりマーク時間tm1をカウンタ222から読み出し、RAM213に記憶する(305)。
【0040】
ステップ306では、式(1)によってt1を計算した後、上記のマーク時間tm1との差をCPU211で求める。前にも述べたように、位置合わせを行なうということは、(tm1−t1)の値を0にするようにウェブ速度を制御することであるから、この差に応じた制御量、つまりウェブ搬送速度変更量を求める。本発明においては、予め、(tm1−t1)とウェブ搬送速度変更量Δv1との関係が図6のようなテーブルとしてRAM213またはROM212に格納されており、テーブルを参照して得られるΔv1の値がCPU211にロードされる。
【0041】
なお、図6のテーブルは、マーク時間tm1とt1との差が0のときΔv1が0であり、tm1>t1のとき、つまり表面の先頭マークが裏面に対して遅れているときはΔv1を正の方向に増加し、tm1<t1のとき、つまり表面の先頭マークが裏面に対して進んでいるときはΔv1を負の方向に増加させることを示している。
【0042】
この実施例では、モータの速度を制御するのに、公知の(比例+微分)制御方式を採用している。ステップ306は比例制御をするための演算であり、ステップ307,308,309は微分制御をするのに必要な演算である。
【0043】
次にステップ307,308では前回のマーク時間tm0と今回のマーク時間tm1との差を求め、ステップ309でその偏差に対応するウェブ搬送速度変更量Δvを計算している。微分制御を行なうためにCPF長(図8)に対するΔtの割合だけその時点のウェブ搬送速度を加速あるいは減速させる。ウェブ搬送速度をv、補正する速度をΔvとすると、Δvは式(2)により求められる。
Δv=(Δt/CPF長)×v (式2)
ステップ310では以上のようにして計算された速度変更量Δv1、Δvをvに加えて新たな標準値を算出し、ステップ312で第3カウンタ231に新たなデータをセットしてモータ233の速度を制御する。
【0044】
一方、ステップ311ででは、上記のv(=v+Δv+Δv1)をv0としてRAM213に記憶しておく。これはマークが検出されるまでの従来の無制御期間に使用するためである。
【0045】
次に、最初のステップ301に戻り、ここでウェブ搬送制御タイミング信号(CPF LEG−P)が発生していないときには、ステップ313にいって1回目のウェブ搬送制御信号(CPF−N)が発生したかどうかを判定する。発生していないときは、制御は終了する。発生したときは、図5の点線で囲まれた制御に移るが、本発明の方法はこの制御に特徴がある。
【0046】
第1回目のウェブ搬送制御信号(CPF−N)が発生し、まだマーク信号が検出されない期間は、ステップ314により、RAM213から先に格納してあるv0を読み出しこれをCPU211にロードする。そしてウェブ搬送開始時に読み出した速度データv0を目標にウェブ搬送モータ233を加速する。ウェブ搬送モータ233の目標速度が変化すると、所定のウェブ搬送量を得るのに要する時間も変化する。したがって感光体ドラム101(図7)に仮想的に設定される第1ページ目のページ先頭と、ウェブWの第1ページ目のトナーマークとを転写ポイントTPで一致させるには、ウェブ搬送開始のタイミングをウェブ搬送モータ233の目標速度に応じて変化させればよい。
【0047】
図10はウェブ搬送モータの駆動を開始してから、ウェブの所定の搬送量を得るのに要する時間が目標速度により変わることを示している。縦軸はウェブ速度、横軸は時間であるから、ウェブの搬送量は面積であらわされる。目標速度Bより低い目標速度Aの場合には所定の搬送距離を得るのに必要な時間は長くなる。いま、ウェブ搬送モータの目標速度をv0、加速度をa,所定のウェブ搬送量をlとすると、所要時間t2は、式(3)で求められる。
t2=1/v0+v0/2a 式(3)
図7、図8を参照して、CPF−Nの立下りから転写ポイントまでの時間、つまり感光体ドラム101上に仮想的に設定されるページ先頭がEPから転写ポイントTPに到達するのに要する時間t3はL1/Vpで一定である。一方、CPF−Nの立下りからある時間t4を経過してからウェブ搬送を開始し、t2の時間経過後にウェブWのページ先頭をあらわすトナーマークRmが転写ポイントTPで、前述の仮想的ページ先頭PPと一致するためには式(4)が成立しなければならない。
t4=t3−t2 式(4)
上記の考え方にしたがって、図5のステップ315では式(3)の演算を行い、ステップ316では式(4)の演算をCPU211で行なっている。そして計算されたt4に相当するデータをCPU211から第2カウンタ242にセットすることにより、搬送を開始するタイミングを制御している(ステップ317,318,319)。さらに先にロードしたv0に相当するデータを、CPU211から第3カウンタ231にセットすることにより(ステップ320)、ウェブ搬送モータ233を制御している。すなわち、トナーマーク信号が検出される前においても、予め記憶しておいたデータを用いて、所定のウェブ搬送量に必要なモータ駆動時間(駆動開始時間)と、モータの目標速度を計算し、位置合わせ制御を行なうため、従来のような無制御の期間はなくなる。
【0048】
以上本発明の一実施例について説明したが、本発明の基本的な考え方を変更しない範囲で種々の変更をすることは容易である。例えば、実施例ではプリンタP2の中にコントローラ20を設け、これとは別にコントローラ17を設けているが、これらは1つのコントローラとして構成することは容易である。
【0049】
また第1、第2、第3のカウンタをコントローラ20の中に設けているが、これらはソフトウエアで構成する(ソフトカウンタ)ことも容易である。その他、当業者が極めて容易にできる設計変更は、本発明の範囲内であることは言うまでもない。
【0050】
【発明の効果】
以上述べたように本発明によれば、トナーマークを検出する毎に算出されたウェブ搬送速度に関するデータをメモリに格納しておき、これを印刷開始時のウェブ搬送を開始した時点からマークセンサが最初の位置合わせマークを検出する時点までの期間において使用することにより、マーク信号が検出されるまでの期間も位置合わせの制御を行なうことが可能になった。このため、第1の面の画像と第2の面の画像とを極めて短時間で位置合わせすることができ、表裏の画像位置を正確に位置合わせして印刷することができるという効果を奏する。
【図面の簡単な説明】
【図1】本発明に適用される印刷装置の一例を示す全体構成図である。
【図2】本発明印刷システムの一実施例の全体構成図である。
【図3】位置合せマークの位置関係を示す模式図である。
【図4】本発明システムのコントローラの一実施例を示す構成図である。
【図5】本発明制御方法の一実施例を示すフローチャートである。
【図6】本発明に用いられるメモリに格納されるデータを説明するための説明図である。
【図7】本発明のウェブ搬送制御を説明する模式図である。
【図8】本発明のウェブ搬送制御を説明するタイミングチャートである。
【図9】本発明のウェブ搬送モータの速度制御に用いられるパルスのタイミングチャートである。
【図10】ウェブ搬送速度と加速に要する時間の関係の一例を示すグラフである。
【符号の説明】
W…ウェブ、P, P1,P2…印刷装置、16…マーク検出手段、17…コントローラ,20…コントローラ、21…マイコン部、22…マーク信号処理部、23…ウェブ搬送モータ制御部、24…紙送り制御信号処理部。
Claims (1)
- ウェブの第1の面に画像を形成する第1印刷装置と、第1印刷装置の後段に設けられ前記ウェブの第2の面に画像を形成する第2印刷装置と、第1印刷装置と第2印刷装置の間に設けられ、第1印刷装置から送り出された前記ウェブの表裏を反転させる反転装置とを有し、少なくとも第1印刷装置は、前記ウェブの予め指定された位置に位置合せマークを形成するマーク形成手段を有し、少なくとも第2印刷装置は、第1印刷装置で形成された前記位置合せマークを検出するマーク検出手段と、該マーク検出手段からのマーク検出信号に基づいて前記ウェブの搬送速度を制御する制御手段とを有する印刷システムにおいて、
前記制御手段は、露光タイミングに同期して発生するウェブ搬送制御信号の発生から所定時間経過後に前記ウェブの搬送を開始するウェブ搬送開始タイミング制御手段と、前記マーク検出手段が前記位置合せマークを検出する毎にウェブの搬送速度に関連する情報を記憶する記憶手段を有し、
前記ウェブ搬送開始タイミング制御手段は、前記記憶手段に記憶された過去のウェブ搬送速度の情報に基づいてウェブ搬送を開始するタイミングを制御するとともに、
前記制御手段は、ウェブ搬送を開始した時点から、前記マーク検出手段が最初の位置合せマークを検出するまでの期間を前記記憶手段に記憶された過去のウェブ搬送速度の情報に基づいて前記ウェブの搬送速度を制御することを特徴とする両面印刷システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002056494A JP3874256B2 (ja) | 2002-03-01 | 2002-03-01 | 両面印刷システムおよび方法 |
| US10/366,612 US6763220B2 (en) | 2002-03-01 | 2003-02-14 | Printing system and method for printing on both surfaces of web |
| DE10309236A DE10309236B4 (de) | 2002-03-01 | 2003-03-03 | Vorrichtung und Verfahren zum Drucken auf beiden Oberflächen einer Bahn |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002056494A JP3874256B2 (ja) | 2002-03-01 | 2002-03-01 | 両面印刷システムおよび方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003255635A JP2003255635A (ja) | 2003-09-10 |
| JP3874256B2 true JP3874256B2 (ja) | 2007-01-31 |
Family
ID=27784638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002056494A Expired - Fee Related JP3874256B2 (ja) | 2002-03-01 | 2002-03-01 | 両面印刷システムおよび方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6763220B2 (ja) |
| JP (1) | JP3874256B2 (ja) |
| DE (1) | DE10309236B4 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4654578B2 (ja) * | 2001-07-23 | 2011-03-23 | 富士ゼロックス株式会社 | 用紙搬送装置および画像形成装置 |
| JP3862160B2 (ja) * | 2002-03-29 | 2006-12-27 | リコープリンティングシステムズ株式会社 | 印刷停止制御方法 |
| JP4510416B2 (ja) * | 2003-09-22 | 2010-07-21 | 株式会社リコー | 印刷装置を含む印刷システム |
| JP2005205759A (ja) * | 2004-01-23 | 2005-08-04 | Ricoh Printing Systems Ltd | 両面印刷システム |
| JP2007008143A (ja) | 2004-08-18 | 2007-01-18 | Ricoh Printing Systems Ltd | タンデム連続紙プリンタ |
| US7332361B2 (en) | 2004-12-14 | 2008-02-19 | Palo Alto Research Center Incorporated | Xerographic micro-assembler |
| KR100811165B1 (ko) * | 2005-06-21 | 2008-03-07 | 삼성전자주식회사 | 인쇄 위치 오차 저감 방법 및 화상 형성 장치 |
| JP4774840B2 (ja) * | 2005-07-08 | 2011-09-14 | 富士ゼロックス株式会社 | 画像形成装置、及び重連印刷装置、並びに連続紙搬送制御方法 |
| US7967407B2 (en) * | 2006-02-03 | 2011-06-28 | R.R. Donnelley | Use of a sense mark to control a printing system |
| WO2009005766A2 (en) * | 2007-06-29 | 2009-01-08 | Rr Donnelley | Use of a sense mark to control a printing system |
| US8753026B2 (en) | 2007-06-29 | 2014-06-17 | R.R. Donnelley & Sons Company | Use of a sense mark to control a printing system |
| US20090067911A1 (en) * | 2007-09-12 | 2009-03-12 | Seiko Epson Corporation | Printing method, printing device, and method of producing printing material |
| DE112008003747B4 (de) * | 2008-02-29 | 2021-05-12 | Hewlett-Packard Development Company, L.P. | Systeme und Verfahren zum Drucken auf ein Bahnsubstrat |
| US8099009B2 (en) * | 2008-05-23 | 2012-01-17 | Eastman Kodak Company | Method for print engine synchronization |
| ATE544605T1 (de) * | 2008-05-28 | 2012-02-15 | Digital Information Ltd Ag | Vorrichtung und verfahren zur herstellung von proof-drucken |
| JP5323555B2 (ja) * | 2009-03-27 | 2013-10-23 | 大日本スクリーン製造株式会社 | 印刷システムおよび印刷方法 |
| US8355159B2 (en) * | 2009-05-19 | 2013-01-15 | Eastman Kodak Company | Print engine speed compensation |
| US20100296823A1 (en) * | 2009-05-19 | 2010-11-25 | Dobbertin Michael T | Dual engine synchronization |
| JP5321295B2 (ja) * | 2009-07-02 | 2013-10-23 | 富士ゼロックス株式会社 | 媒体搬送装置、画像形成装置、及び画像形成システム |
| US9098903B2 (en) * | 2009-07-21 | 2015-08-04 | R.R. Donnelley & Sons Company | Systems and methods for detecting alignment errors |
| JP5454910B2 (ja) * | 2010-03-08 | 2014-03-26 | 富士ゼロックス株式会社 | 画像形成装置および画像形成装置制御用プログラム |
| JP5760433B2 (ja) * | 2010-12-24 | 2015-08-12 | 株式会社リコー | 印刷装置 |
| CN103502009B (zh) | 2011-03-11 | 2016-05-25 | 惠普印迪戈股份公司 | 用于卷筒印刷机的可转换缓冲器 |
| US11415919B2 (en) | 2017-03-28 | 2022-08-16 | Hewlett-Packard Development Company, L.P. | Printing devices |
| US10370214B2 (en) | 2017-05-31 | 2019-08-06 | Cryovac, Llc | Position control system and method |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2690075B2 (ja) * | 1986-08-21 | 1997-12-10 | 松下電送 株式会社 | カラー画像記録装置 |
| US4912491A (en) * | 1987-05-30 | 1990-03-27 | Canon Kabushiki Kaisha | Apparatus for forming superimposed images |
| JPH03219271A (ja) * | 1989-11-20 | 1991-09-26 | Matsushita Graphic Commun Syst Inc | カラー画像記録装置 |
| US5160946A (en) * | 1991-07-19 | 1992-11-03 | Xerox Corporation | Image registration system |
| US5868069A (en) * | 1996-09-17 | 1999-02-09 | Escher-Grad Technologies Inc. | Method of generating proofs of print signatures |
| IL121564A (en) * | 1997-08-18 | 2001-06-14 | Scitex Corp Ltd | Double-sided printing press with a single printing roller for each color |
| DE59902137D1 (de) * | 1998-08-13 | 2002-08-29 | Oce Printing Systems Gmbh | Drucksystem zum bedrucken eines aufzeichnungsträgers mit zwei druckern sowie verfahren zum betrieb eines derartigen drucksystems |
| JP3680989B2 (ja) * | 2000-12-22 | 2005-08-10 | リコープリンティングシステムズ株式会社 | 印刷システム |
| JP2003136793A (ja) * | 2001-08-24 | 2003-05-14 | Hitachi Koki Co Ltd | 印刷システムおよびその印刷開始時の位置合わせ制御方法 |
| US6795683B2 (en) * | 2002-01-11 | 2004-09-21 | Hitachi Printing Solutions, Ltd. | Tandem type printing system |
-
2002
- 2002-03-01 JP JP2002056494A patent/JP3874256B2/ja not_active Expired - Fee Related
-
2003
- 2003-02-14 US US10/366,612 patent/US6763220B2/en not_active Expired - Lifetime
- 2003-03-03 DE DE10309236A patent/DE10309236B4/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US6763220B2 (en) | 2004-07-13 |
| US20030165349A1 (en) | 2003-09-04 |
| JP2003255635A (ja) | 2003-09-10 |
| DE10309236A1 (de) | 2003-09-25 |
| DE10309236B4 (de) | 2009-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3874256B2 (ja) | 両面印刷システムおよび方法 | |
| JP3680989B2 (ja) | 印刷システム | |
| US7552995B2 (en) | Duplex printing system | |
| JP2012048207A (ja) | 印刷システム | |
| US6684051B2 (en) | Print system and registration control method at print start time of the print system | |
| US6795683B2 (en) | Tandem type printing system | |
| JP4578265B2 (ja) | 画像記録装置およびその制御方法 | |
| US6714758B2 (en) | Printing system that positions web at accurate waiting position | |
| JP4299598B2 (ja) | 両面印刷システム及び方法 | |
| JP4013139B2 (ja) | タンデム印刷システム | |
| US20140312562A1 (en) | Sheet conveying apparatus and image forming apparatus | |
| JP4510416B2 (ja) | 印刷装置を含む印刷システム | |
| JP2006076169A (ja) | 印刷装置の画像位置合わせマーク検出装置 | |
| JP2013045081A (ja) | 画像形成装置及び画像形成システム | |
| JP3147962B2 (ja) | 画像形成装置 | |
| JP2004243654A (ja) | 両面印刷システム | |
| JP2004233705A (ja) | 両面印刷システム | |
| JP6035869B2 (ja) | 印刷システム | |
| JP4326859B2 (ja) | 画像形成装置 | |
| JP2005096081A5 (ja) | ||
| JP2003066811A (ja) | 印刷システム | |
| JP2004238165A (ja) | 両面印刷装置におけるウェブ蛇行補正制御方式 | |
| JP4041959B2 (ja) | 印刷システムにおける印刷停止制御方式 | |
| JP2009294481A (ja) | 電子写真式印刷装置のヒートロール駆動制御方法 | |
| JP3896249B2 (ja) | 画像形成装置における給紙方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040521 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060804 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060825 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20061006 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20061019 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091102 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091102 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101102 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111102 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111102 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121102 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131102 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |