JP2024529935A - Mixed Energy Ion Implantation - Google Patents
Mixed Energy Ion Implantation Download PDFInfo
- Publication number
- JP2024529935A JP2024529935A JP2024503835A JP2024503835A JP2024529935A JP 2024529935 A JP2024529935 A JP 2024529935A JP 2024503835 A JP2024503835 A JP 2024503835A JP 2024503835 A JP2024503835 A JP 2024503835A JP 2024529935 A JP2024529935 A JP 2024529935A
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- ion beam
- ion
- energy
- ion implantation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000005468 ion implantation Methods 0.000 title claims abstract description 136
- 238000010884 ion-beam technique Methods 0.000 claims abstract description 287
- 230000001133 acceleration Effects 0.000 claims abstract description 118
- 239000007943 implant Substances 0.000 claims abstract description 82
- 238000000034 method Methods 0.000 claims abstract description 66
- 238000005452 bending Methods 0.000 claims abstract description 33
- 150000002500 ions Chemical class 0.000 claims description 137
- 238000002513 implantation Methods 0.000 claims description 60
- 238000009826 distribution Methods 0.000 claims description 26
- 239000002019 doping agent Substances 0.000 claims description 26
- 230000008859 change Effects 0.000 claims description 16
- 239000000463 material Substances 0.000 claims description 13
- 230000007246 mechanism Effects 0.000 claims description 11
- 230000001360 synchronised effect Effects 0.000 claims description 11
- 238000012545 processing Methods 0.000 claims description 7
- 230000003287 optical effect Effects 0.000 claims description 4
- 238000012512 characterization method Methods 0.000 claims description 2
- 230000003750 conditioning effect Effects 0.000 claims 2
- 230000000694 effects Effects 0.000 abstract description 11
- 230000008569 process Effects 0.000 description 28
- 235000012431 wafers Nutrition 0.000 description 25
- 238000000605 extraction Methods 0.000 description 16
- 239000002245 particle Substances 0.000 description 16
- 230000006870 function Effects 0.000 description 14
- 230000032258 transport Effects 0.000 description 10
- 230000008901 benefit Effects 0.000 description 9
- 239000000356 contaminant Substances 0.000 description 9
- 238000004980 dosimetry Methods 0.000 description 9
- 238000004519 manufacturing process Methods 0.000 description 9
- 230000007935 neutral effect Effects 0.000 description 7
- 239000004065 semiconductor Substances 0.000 description 7
- 238000005259 measurement Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000001914 filtration Methods 0.000 description 4
- 230000033001 locomotion Effects 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 238000011144 upstream manufacturing Methods 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 230000033228 biological regulation Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000009827 uniform distribution Methods 0.000 description 3
- 238000013461 design Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 239000012535 impurity Substances 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000001629 suppression Effects 0.000 description 2
- ZOXJGFHDIHLPTG-UHFFFAOYSA-N Boron Chemical compound [B] ZOXJGFHDIHLPTG-UHFFFAOYSA-N 0.000 description 1
- GYHNNYVSQQEPJS-UHFFFAOYSA-N Gallium Chemical compound [Ga] GYHNNYVSQQEPJS-UHFFFAOYSA-N 0.000 description 1
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 1
- 238000000137 annealing Methods 0.000 description 1
- 229910052787 antimony Inorganic materials 0.000 description 1
- WATWJIUSRGPENY-UHFFFAOYSA-N antimony atom Chemical compound [Sb] WATWJIUSRGPENY-UHFFFAOYSA-N 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 229910052785 arsenic Inorganic materials 0.000 description 1
- RQNWIZPPADIBDY-UHFFFAOYSA-N arsenic atom Chemical compound [As] RQNWIZPPADIBDY-UHFFFAOYSA-N 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 229910052796 boron Inorganic materials 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000010891 electric arc Methods 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 230000005686 electrostatic field Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 239000003574 free electron Substances 0.000 description 1
- 229910052733 gallium Inorganic materials 0.000 description 1
- 238000007654 immersion Methods 0.000 description 1
- 229910052738 indium Inorganic materials 0.000 description 1
- APFVFJFRJDLVQX-UHFFFAOYSA-N indium atom Chemical compound [In] APFVFJFRJDLVQX-UHFFFAOYSA-N 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000002161 passivation Methods 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 229910052698 phosphorus Inorganic materials 0.000 description 1
- 239000011574 phosphorus Substances 0.000 description 1
- 238000005036 potential barrier Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 230000001550 time effect Effects 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
Images






Abstract
イオン注入システムおよび方法は、シリアル単一ワークピースエンドステーションにおいて、ワークピースに対するイオンビームのエネルギーを変化させた注入を実行する。加速/減速ステージの電極、屈曲電極、および/または、エネルギーフィルタが、ワークピースに向かうイオンビームの最終エネルギーまたは経路を制御する。屈曲電極またはエネルギーフィルタは、加速/減速ステージの一部を形成してもよいし、あるいは下流に配置されてもよい。走査装置は、イオンビームおよび/またはワークピースを走査する。電源は、様々な電気バイアス信号を電極に供給する。イオンビームおよび/またはイオンビームを通るワークピースの走査とともに、コントローラは、ワークピースにおける所望のイオンビームエネルギーに基づいて電気バイアス信号を選択的に変化させる。波形ジェネレータは変化をもたらすとともに、加速/減速ステージ、屈曲電極、および/または、エネルギーフィルタに供給される電気バイアス信号を同期させうる。The ion implantation system and method performs implants with varying energy of the ion beam on the workpiece in a serial single workpiece end station. An acceleration/deceleration stage electrode, a bending electrode, and/or an energy filter control the final energy or path of the ion beam towards the workpiece. The bending electrode or energy filter may form part of the acceleration/deceleration stage or may be located downstream. A scanning device scans the ion beam and/or the workpiece. A power supply provides various electrical bias signals to the electrodes. As the ion beam and/or workpiece is scanned through the ion beam, a controller selectively varies the electrical bias signals based on the desired ion beam energy at the workpiece. A waveform generator may effect the variations and synchronize the electrical bias signals provided to the acceleration/deceleration stage, the bending electrode, and/or the energy filter.
Description
[関連出願への参照]
本出願は、(i)2021年8月5日に出願された、「BLENDED ENERGY ION IMPLANTATION」というタイトルが付された米国仮出願63/229,751と、(ii)2021年8月5日に出願された、「CHAINED MULTIPLE ENERGY IMPLANT PROCESS STEPS」というタイトルが付された米国仮出願63/229,663と、の利益を主張する。これらの全ての内容は、参照により全体が本明細書に組み込まれる。
REFERENCE TO RELATED APPLICATIONS
This application claims the benefit of (i) U.S. Provisional Application No. 63/229,751, entitled "BLENDED ENERGY ION IMPLANTATION," filed on August 5, 2021, and (ii) U.S. Provisional Application No. 63/229,663, entitled "CHAINED MULTIPLE ENERGY IMPLANT PROCESS STEPS," filed on August 5, 2021, the contents of all of which are incorporated herein by reference in their entireties.
[分野]
本発明は、一般的にはイオン注入システムに関する。より具体的には、本発明は、イオン注入時にワークピースに輸送されるイオンビームに、連続的に制御された可変エネルギーをもたらすためのシステムおよび方法に関する。
[Field]
The present invention relates generally to ion implantation systems and, more particularly, to a system and method for providing continuously controlled variable energy to an ion beam delivered to a workpiece during ion implantation.
[背景]
半導体デバイスの製造には、不純物を半導体にドープするためにイオン注入が用いられる。イオン注入システムは、n型またはp型材料ドーピングを生じさせるために、あるいは、集積回路の製造時にパッシベーション層を形成するために、半導体ウェハなどのワークピースをイオンビームに由来するイオンによってドープするために利用されることが多い。このようなビーム処理は、集積回路の製造時に半導体材料を製造するために、所定のエネルギーレベルにおいて、かつ、制御された濃度において、特定のドーパント材料の不純物をウェハに選択的に注入するために使用されることが多い。半導体ウェハをドープするために使用される場合、イオン注入システムは、選択されたイオン種をワークピースに注入して、所望の外因性材料が得られる。例えば、アンチモン、ヒ素、またはリンなどのソース材料から生じたイオンを注入することは、「n型」外因性材料ウェハを生じさせる。その一方、「p型」外因性材料ウェハは、多くの場合、ホウ素(ボロン)、ガリウム、またはインジウムなどのソース材料を用いて生じさせたイオンから得られる。
[background]
Ion implantation is used in the manufacture of semiconductor devices to dope semiconductors with impurities. Ion implantation systems are often utilized to dope workpieces such as semiconductor wafers with ions derived from an ion beam to produce n-type or p-type material doping or to form passivation layers during the manufacture of integrated circuits. Such beam processes are often used to selectively implant wafers with impurities of a particular dopant material at predefined energy levels and in controlled concentrations to produce semiconductor materials during the manufacture of integrated circuits. When used to dope semiconductor wafers, ion implantation systems implant selected ion species into the workpiece to produce the desired extrinsic material. For example, implanting ions derived from a source material such as antimony, arsenic, or phosphorus produces an "n-type" extrinsic material wafer. On the other hand, "p-type" extrinsic material wafers are often derived from ions produced using a source material such as boron, gallium, or indium.
典型的なイオン注入装置(イオン注入器)は、イオン源と、イオン引出デバイスと、質量分析デバイスと、ビーム輸送デバイスと、ウェハ処理デバイスとを含む。イオン源は、所望の原子または分子ドーパント種のイオンを生じさせる。これらのイオンが、引出システム(典型的には、電極のセット)によって当該源から引き出される。これにより、当該源からのイオンの流れにエネルギーが与えられ、イオンビームが形成される。所望のイオンは、質量分析デバイス(典型的には、引き出されたイオンビームの質量分散または質量分離を実行する磁気双極子)の内部において、イオンビームから分離させられる。ビーム輸送デバイス(典型的には、一連の集束装置を含む真空システム)は、イオンビームの所望の属性(特性,properties)を維持または改善しつつ、当該イオンビームをウェハ処理デバイスに向けて輸送する。最終的に、半導体ウェハは、ウェハハンドリングシステムによって、ウェハ処理デバイスの内外へと移送される。ウェハハンドリングシステムは、処理されるべきウェハをイオンビームの正面に配置し、処理された後のウェハをイオン注入装置から取り出すために、1つ以上のロボットアームを含んでいてよい。 A typical ion implanter includes an ion source, an ion extraction device, a mass analysis device, a beam transport device, and a wafer processing device. The ion source produces ions of the desired atomic or molecular dopant species. These ions are extracted from the source by an extraction system (typically a set of electrodes), which energizes the stream of ions from the source to form an ion beam. The desired ions are separated from the ion beam inside a mass analysis device (typically a magnetic dipole that performs mass dispersion or separation of the extracted ion beam). A beam transport device (typically a vacuum system including a series of focusing devices) transports the ion beam towards the wafer processing device while maintaining or improving the desired properties of the ion beam. Finally, the semiconductor wafers are transferred in and out of the wafer processing device by a wafer handling system, which may include one or more robotic arms to position the wafer to be processed in front of the ion beam and to remove the processed wafer from the ion implanter.
現在のイオン注入技術は、ワークピース(基板またはウェハとも称される)に、特定の状態におけるイオンを注入するためのレシピを確立している。当該レシピは、基板内に注入されるイオンの所与の濃度および深さプロファイルをもたらす。濃度および深さプロファイルは、注入されるドーパントのタイプまたは所望の種と、ワークピースの密度および組成と、注入条件とによって概ね決定される。注入条件は、例えば、注入される種のエネルギー(これらは、イオンが注入される深さを決定する)、イオンビームに対するワークピースの表面の注入角度(例:チルトまたはツイスト)、および、注入の総ドーズ量などである。さらに、所望の注入結果を生じさせるために、注入レシピにおいて、ワークピースの温度および/または注入されるイオンの(1つ以上の)荷電状態などの変数が制御されてもよい。 Current ion implantation techniques establish recipes for implanting ions in a particular state into a workpiece (also referred to as a substrate or wafer). The recipe results in a given concentration and depth profile of the ions implanted into the substrate. The concentration and depth profile are largely determined by the type of dopant or desired species to be implanted, the density and composition of the workpiece, and the implantation conditions, such as the energy of the implanted species (which determine the depth to which the ions are implanted), the implantation angle (e.g., tilt or twist) of the workpiece surface relative to the ion beam, and the total implant dose. Additionally, variables such as the temperature of the workpiece and/or the charge state(s) of the implanted ions may be controlled in the implantation recipe to produce the desired implantation results.
一般的には、所望のドーパントプロファイルを確立するために、エネルギー、ドーズ(線量)、チルト(傾斜)、または、ツイスト(ねじれ)の異なる組み合わせを使用して、同じ基板に対して同じ種の複数の注入を実行することが典型的である。ドーズ、チルト、およびツイストは、単一の注入を、それぞれ異なる入力パラメータを有する複数の注入ステップへと分割することによって、当該単一のインプラントにおいて調整可能となりうる。その一方、一般的には、イオンビームの所望の特性(characteristics)の完全性を維持する(例えば、ビーム調整を行う)ためには、注入のエネルギーを変更して、注入されたイオンの深さを変更することは、様々な設定、および/または、電源に供給される電気バイアス信号、および/または、イオン注入システムのコンポーネント(構成要素)に対して、著しい調整および/または修正を必要とする場合がある。当該調整および/または修正は、典型的には、イオン注入システムをセットアップ(起動)するために使用される時間(いわゆる調整時間)を増加させるので、当該イオン注入システムの生産性に影響を及ぼす。さらに、これらのビーム調整ステップは、イオンビームの正面にウェハを配置するために使用されるワークピースサポート(例:プラテンまたはクランプ)上のワークピースを取り外して、当該ワークピースを再配置することを要する場合がある。このことは、システムの生産性および歩留まりにさらに影響を及ぼしうるワークピースのハンドリングを生じさせる。 In general, it is typical to perform multiple implants of the same species on the same substrate using different combinations of energy, dose, tilt, or twist to establish a desired dopant profile. The dose, tilt, and twist can be adjusted in a single implant by splitting the single implant into multiple implant steps, each with different input parameters. On the other hand, typically, to maintain the integrity of the desired characteristics of the ion beam (e.g., to perform beam tuning), changing the energy of the implant and thus the depth of the implanted ions may require significant adjustments and/or modifications to various settings and/or electrical bias signals supplied to the power supplies and/or components of the ion implantation system. Such adjustments and/or modifications typically increase the time used to set up the ion implantation system (so-called tuning time), thus affecting the productivity of the ion implantation system. Additionally, these beam adjustment steps may require removing and repositioning the workpiece on the workpiece support (e.g., platen or clamp) used to position the wafer in front of the ion beam, resulting in workpiece handling that can further impact the productivity and yield of the system.
[概要]
本開示は、単一の連続的な注入プロセスにおいて、例えば、同一のまたは変化するドーズおよび/または角度において、エネルギーの分布を注入するためのシステムおよび方法を提供している。そこで、以下では、本発明の一部の態様についての基本的な理解を提供するために、本開示の簡略化された概要を提示する。この概要は、本発明についての広範な概観ではない。本概要は、本発明の重要な要素を特定するものでもないし、本発明の範囲を定めるものでもない。本概要の目的は、後に記載されている詳細な説明の序文として、本発明の一部のコンセプトを単純化した形にて示すことにある。
[overview]
The present disclosure provides systems and methods for implanting distributions of energy, e.g., at the same or varying doses and/or angles, in a single, continuous implantation process. Thus, the following presents a simplified summary of the disclosure in order to provide a basic understanding of some aspects of the invention. This summary is not an extensive overview of the invention. It is not intended to identify key elements of the invention or to delineate the scope of the invention. Its purpose is to present some concepts of the invention in a simplified form as a prelude to the more detailed description that is presented later.
本開示の例示的な態様によれば、イオン注入システムが提供されている。イオン源は、ドーパント材料をイオン化し、イオンビームを発生させるように構成されている。例えば、ビームラインアセンブリは、イオン源の下流に配置されている。当該ビームラインアセンブリは、イオンビームをワークピースに向けて輸送するように構成されている。例えば、走査装置(scanning apparatus)は、イオンビームおよびワークピースのうちの1つ以上を、第1走査軸に沿って互いに対して走査するように構成されている。そして、加速/減速ステージが設けられている。当該加速/減速ステージは、イオンビームの輸送時に、前記イオンビームを受け入れる(受容する)ように構成されている。エンドステーションは、加速/減速ステージの下流に配置されている。エンドステーションは、ワークピースサポートを備えている。当該ワークピースサポートは、イオンビームの経路内にワークピースを選択的に配置するように構成されている。 According to an exemplary aspect of the present disclosure, an ion implantation system is provided. An ion source is configured to ionize a dopant material to generate an ion beam. For example, a beamline assembly is disposed downstream of the ion source. The beamline assembly is configured to transport the ion beam toward a workpiece. For example, a scanning apparatus is configured to scan one or more of the ion beam and the workpiece relative to one another along a first scan axis. And, an acceleration/deceleration stage is provided. The acceleration/deceleration stage is configured to receive the ion beam during transport. An end station is disposed downstream of the acceleration/deceleration stage. The end station includes a workpiece support. The workpiece support is configured to selectively position the workpiece in a path of the ion beam.
例えば、1つ以上の電源は、加速/減速ステージに動作可能に接続されている。1つ以上の電源は、1つ以上の電気バイアス信号を加速/減速ステージに供給するように構成されている。例えば、加速/減速ステージは、1つ以上の電気バイアス信号に基づいてイオンビームの複数のエネルギーを定めるように構成されている。 For example, one or more power sources are operably connected to the acceleration/deceleration stage. The one or more power sources are configured to provide one or more electrical bias signals to the acceleration/deceleration stage. For example, the acceleration/deceleration stage is configured to determine a plurality of energies of the ion beam based on the one or more electrical bias signals.
例えば、第1走査軸に沿ったイオンビームおよびワークピースのうちの1つ以上の走査とともに(同時に)、加速/減速ステージに供給される1つ以上の電気バイアス信号を選択的に変調するように、コントローラが構成されている。一例として、1つ以上の電気バイアス信号の選択的変化(選択的変動)は、ワークピースに対するイオンビームの位置と、ワークピースに対する所定の注入プロファイルと、に少なくとも部分的に基づいている。 For example, the controller may be configured to selectively modulate one or more electrical bias signals provided to the acceleration/deceleration stage in conjunction with scanning one or more of the ion beam and the workpiece along the first scan axis. As an example, the selective variation of the one or more electrical bias signals is based at least in part on a position of the ion beam relative to the workpiece and a predetermined implantation profile for the workpiece.
別の実施例態様によれば、イオン注入のための方法が提供されている。当該方法では、イオンビームがワークピースに向けて導かれる。そして、イオンビームおよびワークピースのうちの以上が互いに対して走査されることによって、イオンがワークピースに注入される。イオンビームおよびワークピースのうちの1つ以上の走査とともに、ワークピースに対するイオンビームの位置と、ワークピースに対する所定の注入プロファイルと、に少なくとも部分的に基づいて、イオンビームのエネルギーが選択的に変更される。これにより、ワークピースへのイオン注入の結果として生じる深さが、走査とともに変更される。 According to another embodiment, a method for ion implantation is provided in which an ion beam is directed toward a workpiece. At least one of the ion beam and the workpiece are scanned relative to one another to implant ions into the workpiece. Energy of the ion beam is selectively varied in conjunction with the scanning of at least one of the ion beam and the workpiece based at least in part on a position of the ion beam relative to the workpiece and a predetermined implantation profile for the workpiece. This causes a resulting depth of ion implantation into the workpiece to be varied in conjunction with the scanning.
別の例示的な態様によれば、イオンビームを発生させるように構成されたイオン源と、加速/減速ステージと、を有するイオン注入システムが提供されている。例えば、加速/減速ステージは、イオンビームを受け入れて、当該イオンビームに関連する最終エネルギーを有する最終イオンビームを発生させるように構成されている。例えば、ワークピースサポートは、最終イオンビームの経路に沿ってワークピースを選択的に配置するように構成されている。走査装置は、第1走査軸および第2走査軸に沿ってイオンビームおよびワークピースサポートのうちの1つ以上を互いに対して走査するように構成されている。 According to another exemplary aspect, an ion implantation system is provided having an ion source configured to generate an ion beam and an acceleration/deceleration stage. For example, the acceleration/deceleration stage is configured to receive the ion beam and generate a final ion beam having a final energy associated with the ion beam. For example, the workpiece support is configured to selectively position a workpiece along a path of the final ion beam. The scanning device is configured to scan one or more of the ion beam and the workpiece support relative to one another along a first scan axis and a second scan axis.
例えば、1つ以上の電源は、加速/減速ステージに動作可能に接続されている。当該電源は、1つ以上の電気バイアス信号を加速/減速ステージに供給するように構成されている。例えば、1つ以上の電気バイアス信号は、電圧および電流のうちの1つ以上を含んでいてよい。さらに、例えば、波形ジェネレータ(波形発生器,waveform generator)は、1つ以上の電源のうちの以上に動作可能に接続されている。波形ジェネレータは、1つ以上の電気バイアス信号に波形を制御可能に印加するように構成されている。 For example, one or more power sources are operably connected to the acceleration/deceleration stage. The power sources are configured to provide one or more electrical bias signals to the acceleration/deceleration stage. For example, the one or more electrical bias signals may include one or more of a voltage and a current. Further, for example, a waveform generator is operably connected to one or more of the power sources. The waveform generator is configured to controllably apply a waveform to the one or more electrical bias signals.
さらに、例えば、コントローラは、1つ以上の電源および波形ジェネレータに動作可能に接続されている。イオンビームおよびワークピースサポートのうちの1つ以上の走査とともに、加速/減速ステージに供給される1つ以上の電気バイアス信号を選択的に変化させるように、コントローラが構成されている。このように、イオンビームの複数のエネルギーが、所定の様式によってワークピースに注入される。例えば、加速/減速ステージに供給される1つ以上の電気バイアス信号の選択的変化は、波形と、ワークピースに対するイオンビームの位置と、およびワークピースに注入されるイオンの所定のエネルギーと、に少なくとも部分的に基づいている。 Further, for example, the controller is operatively connected to one or more power sources and a waveform generator. The controller is configured to selectively vary one or more electrical bias signals provided to the acceleration/deceleration stage in conjunction with scanning one or more of the ion beam and the workpiece support. In this manner, multiple energies of the ion beam are implanted into the workpiece in a predetermined manner. For example, the selective variation of the one or more electrical bias signals provided to the acceleration/deceleration stage is based at least in part on the waveform, the position of the ion beam relative to the workpiece, and the predetermined energy of the ions implanted into the workpiece.
さらに別の例示的な態様によれば、イオンビームを形成し、イオンビームをワークピースに向けて導くよう構成されているイオン源を有するイオン注入システムが提供される。例えば、1つ以上のビームラインコンポーネントは、ビーム経路に沿ってイオンビームを輸送するように構成されている。スキャナ装置(scanner apparatus)は、第1走査軸に沿って、イオンビームおよびワークピースのうちの1つ以上を選択的に反復走査するように構成されている。加速/減速ステージは、スキャナ装置の下流に配置されている。電源は、加速/減速段階に電気バイアス信号を供給するように構成されている。例えば、コントローラは、イオンビームおよびワークピースのうちの1つ以上が第1走査軸に沿って反復走査させられているときに、電源から加速/減速ステージに供給される電気バイアス信号を変化または変調させるように構成されている。これにより、第1走査軸に沿ってワークピースに注入されるイオンの最終エネルギーを選択的に変化させることができる。 According to yet another exemplary aspect, an ion implantation system is provided having an ion source configured to form an ion beam and direct the ion beam toward a workpiece. For example, one or more beamline components are configured to transport the ion beam along a beam path. A scanner apparatus is configured to selectively and repeatedly scan one or more of the ion beam and the workpiece along a first scan axis. An acceleration/deceleration stage is disposed downstream of the scanner apparatus. A power supply is configured to provide an electrical bias signal to the acceleration/deceleration stage. For example, the controller is configured to vary or modulate the electrical bias signal provided by the power supply to the acceleration/deceleration stage when one or more of the ion beam and the workpiece are being repeatedly scanned along the first scan axis. This allows for selectively varying the final energy of ions implanted into the workpiece along the first scan axis.
別の例では、所定の波形に対応する電気バイアス信号を供給するように構成されている電源を備えているイオン注入システムが提供されている。例えば、エネルギー変化コンポーネントは、電気バイアス信号を受信して、所定の波形に基づいてイオンビームを最終エネルギーに至るように選択的に変化させるように構成されている。この場合、最終エネルギーは、選択的に可変である。 In another example, an ion implantation system is provided that includes a power supply configured to provide an electrical bias signal corresponding to a predetermined waveform. For example, an energy variation component is configured to receive the electrical bias signal and selectively vary the ion beam to a final energy based on the predetermined waveform, where the final energy is selectively variable.
さらに別の例示的な態様によれば、異なる所定のエネルギーでの複数のシーケンシャル注入(逐次注入)ステップにおいて、単一の調整(チューニング)レシピを使用して単一のワークピースをイオン注入するためのプロセス(方法)が提供されている。当該プロセスは、第1所定エネルギーにおいてイオンビームを注入するためにイオン注入パラメータを設定することと、第1所定エネルギーに関連する第1最小イオンビーム角度を決定(確立)することと、を含んでいる。イオンビーム配向角度(方位角度)は、第1所定のエネルギーに関連する第1最小イオンビーム角度の決定に基づいて、単一のワークピースに対して定められる。例えば、イオン注入パラメータは、第2所定エネルギーにおいてイオンビームを注入するために調整される。そして、第2所定エネルギーに関連する最小イオンビーム角度が決定される。例えば、イオンビーム配向角度は、第2所定のエネルギーに関連する最小イオンビーム角度の決定に基づいて、ワークピースに対してさらに制御される。さらに、各シーケンシャル注入ステップにおいてワークピースに対するイオンビーム配向を調整しつつ、複数のシーケンシャル注入ステップにおいて、第1所エネルギーおよび第2所定エネルギーにおいてイオンを注入するようにワークピースが処理される。 According to yet another exemplary aspect, a process is provided for implanting ions into a single workpiece using a single tuning recipe in multiple sequential implantation steps at different predetermined energies. The process includes setting ion implantation parameters to implant an ion beam at a first predetermined energy and determining a first minimum ion beam angle associated with the first predetermined energy. An ion beam orientation angle is established for the single workpiece based on the determination of the first minimum ion beam angle associated with the first predetermined energy. For example, the ion implantation parameters are adjusted to implant an ion beam at a second predetermined energy. And a minimum ion beam angle associated with the second predetermined energy is determined. For example, the ion beam orientation angle is further controlled for the workpiece based on the determination of the minimum ion beam angle associated with the second predetermined energy. Further, the workpiece is processed to implant ions at the first and second predetermined energies in multiple sequential implantation steps while adjusting the ion beam orientation for the workpiece in each sequential implantation step.
別の例示的な態様では、異なる所定のエネルギーでの複数のシーケンシャル注入ステップにおいて、単一の調整レシピを使用して単一のワークピースにイオンを注入するための方法が提供されている。当該方法では、1つ以上のイオン注入パラメータは、第1所定エネルギーにおいてイオンビームを注入するために設定される。1つ以上のイオン注入パラメータは、第2所定のエネルギーにおいてイオンビームを注入するためにさらに設定される。イオンは、第1所定エネルギーおよび第2所定エネルギーにおいて、ワークピースにシーケンシャル注入される。 In another exemplary aspect, a method is provided for implanting ions into a single workpiece using a single tailored recipe in multiple sequential implantation steps at different pre-determined energies. In the method, one or more ion implantation parameters are set to implant an ion beam at a first pre-determined energy. One or more ion implantation parameters are further set to implant an ion beam at a second pre-determined energy. Ions are sequentially implanted into the workpiece at the first pre-determined energy and the second pre-determined energy.
さらに別の例示的な態様では、異なる所定でのエネルギーで複数のシーケンシャル注入ステップにおいて、単一の調整レシピを使用して単一のワークピースにイオンを注入するための方法が提供されている。例えば、1つ以上のイオン注入パラメータは、第1所定エネルギーにおいてイオンビームを注入するために設定される。そして、第1所定エネルギーに関連する最小イオンビーム角度が決定される。第1所定エネルギーに関連する最小イオンビーム角度の決定に基づいて、第1イオンビーム配向角度がワークピースに対して定められる。1つ以上イオン注入パラメータは、第2所定エネルギーにおいてイオンビームを注入するために制御される。例えば、第2所定エネルギーに関連する最小イオンビーム角度がさらに決定される。そして、第2所定エネルギーに関連する最小イオンビーム角度の決定に基づいて、第2イオンビーム配向角度がワークピースに対して定められる。さらに、イオンビームに対するそれぞれの第1イオンビーム配向および第2イオンビーム配向のそれぞれを制御しつつ、イオンは第1所定エネルギーおよび第2所定のエネルギーにおいてワークピースにシーケンシャル注入される。 In yet another exemplary aspect, a method is provided for implanting ions into a single workpiece using a single tailored recipe in multiple sequential implantation steps at different predefined energies. For example, one or more ion implantation parameters are set to implant an ion beam at a first predefined energy. A minimum ion beam angle associated with the first predefined energy is then determined. Based on the determination of the minimum ion beam angle associated with the first predefined energy, a first ion beam orientation angle is defined for the workpiece. The one or more ion implantation parameters are controlled to implant an ion beam at a second predefined energy. For example, a minimum ion beam angle associated with the second predefined energy is further determined. Based on the determination of the minimum ion beam angle associated with the second predefined energy, a second ion beam orientation angle is defined for the workpiece. Further, ions are sequentially implanted into the workpiece at the first predefined energy and the second predefined energy while controlling each of the first and second ion beam orientations for the ion beam.
上述の各目的および関連する目的を達成するために、本開示は、以下において十分に説明されており、かつ、クレーム(特許請求の範囲)において特に挙示されている構成を含んでいる。以下の記載および添付の図面は、本発明の例示的な実施形態を詳細に示している。しかし、これらの実施形態は、本発明の原理を用いる様々な方法の一部を示しているにすぎない。本発明の他の目的、利点、および新規な構成は、図面を参照して、本発明の詳細な記載から明らかになるであろう。 To the accomplishment of the foregoing and related ends, the present disclosure comprises the features hereinafter fully described and particularly pointed out in the claims. The following description and the annexed drawings set forth illustrative embodiments of the invention in detail. These embodiments are, however, indicative of but some of the various ways in which the principles of the invention are employed. Other objects, advantages and novel features of the invention will become apparent from the following detailed description of the invention when considered in conjunction with the drawings.
[図面の簡単な説明]
図1は、本開示の様々な態様に係る、イオン注入の一部のブロック図である。
BRIEF DESCRIPTION OF THE DRAWINGS
FIG. 1 is a block diagram of a portion of an ion implanter according to various aspects of the present disclosure.
図2Aは、本開示の例示的な態様に係る、エネルギーによるイオンドーズの均一な分布を示すグラフである。 FIG. 2A is a graph showing uniform distribution of ion dose by energy according to an exemplary embodiment of the present disclosure.
図2Bは、本開示の例示的な態様に係る、電圧調整の導関数を示すグラフである。 FIG. 2B is a graph showing the derivative of voltage regulation according to an exemplary embodiment of the present disclosure.
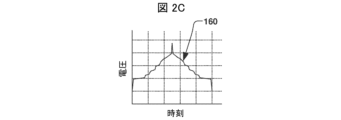
図2Cは、本開示の例示的な態様に係る、別の電圧調整を示すグラフである。 FIG. 2C is a graph showing another voltage adjustment according to an exemplary embodiment of the present disclosure.
図3は、本開示の複数の態様に係る、例示的なイオン注入システムの概略的なブロック図である。 Figure 3 is a schematic block diagram of an exemplary ion implantation system according to aspects of the present disclosure.
図4は、本開示の様々な態様に係る、イオン注入システムにおけるイオンビームの一部を示す。 Figure 4 shows a portion of an ion beam in an ion implantation system according to various aspects of the present disclosure.
図5は、本開示の様々な態様に係る、ワークピースへのイオンの注入を最適化するための方法を示す。 Figure 5 illustrates a method for optimizing implantation of ions into a workpiece according to various aspects of the present disclosure.
[詳細な説明]
上述の各目的および関連する目的を達成するために、本開示は、以下において十分に説明されており、かつ、クレームにおいて特に挙示されている構成を含んでいる。以下の記載および添付の図面は、本発明の例示的な実施形態を詳細に示している。しかし、これらの実施形態は、本発明の原理を用いる様々な方法の一部を示しているにすぎない。本発明の他の目的、利点、および新規な構成は、図面を参照して、本発明の詳細な記載から明らかになるであろう。
Detailed Description
To the accomplishment of the foregoing and related ends, the present disclosure comprises the structure hereinafter fully described and particularly pointed out in the claims. The following description and the annexed drawings set forth illustrative embodiments of the invention in detail. These embodiments are, however, indicative of but a few of the various ways in which the principles of the invention are utilized. Other objects, advantages and novel features of the invention will become apparent from the following detailed description of the invention when considered in conjunction with the drawings.
そこで、以下では、図面を参照して本発明を説明する。全体を通して、同様の参照番号が同様の要素を指すために使用されうる。これらの態様についての説明は、単なる例示であり、限定的な意味として解釈されるべきではないことを理解されたい。以下の説明では、説明を目的として、本発明についての十分な理解を提供すべく、様々な特定の詳細が記載されている。しかしながら、当業者であれば、これらの具体的な詳細のそれぞれおよび全てがなくとも、本発明が具現化されうることは明らかであろう。 The present invention will now be described with reference to the drawings. Like reference numerals may be used to refer to like elements throughout. It should be understood that the description of these aspects is merely illustrative and should not be taken in a limiting sense. In the following description, for purposes of explanation, numerous specific details are set forth in order to provide a thorough understanding of the present invention. However, it will be apparent to one skilled in the art that the present invention may be practiced without each and every one of these specific details.
本開示は、以前に認識されていた顕著な調整および/またはワークピースのハンドリングを伴うことなく、単一の連続的な注入プロセスにおいて、(例:同一のまたは変化するドーズおよび/または角度において)エネルギーの分布を注入するためのシステムおよび方法を提供する。例えば、本開示は、単純なプロセスからさらに複雑なプロセスまでの、様々なプロセスを提供する。単純なプロセスは、単一の注入において2つの独立した注入エネルギーを注入することと同じくらい単純である。さらに複雑なプロセスは、所定の範囲のエネルギーの連続的な分布または範囲を有しており、当該エネルギーの分布または範囲において、ドーズおよび/またはビーム角度についての固定されたまたは制御された勾配を伴っている。例えば、本開示は、ドーパント濃度対深さの、いわゆるボックス状プロファイル(box-shaped profile)を生じさせる必要がある場合に利用されてよい。このことは、半導体デバイス製造において有益でありうる。 The present disclosure provides systems and methods for implanting a distribution of energies (e.g., at the same or varying doses and/or angles) in a single continuous implantation process without significant previously recognized adjustments and/or workpiece handling. For example, the present disclosure provides a variety of processes ranging from simple to more complex. Simple processes are as simple as implanting two independent implant energies in a single implant. More complex processes have a continuous distribution or range of energies over a range, with fixed or controlled gradients in dose and/or beam angle in the energy distribution or range. For example, the present disclosure may be utilized when it is necessary to produce a so-called box-shaped profile of dopant concentration versus depth. This may be beneficial in semiconductor device manufacturing.
さらに、本開示は、複数のレシピに応じたイオン注入システムの事前調整(プレチューニング)を、注入に先立ち提供する。例えば、イオン注入システムの様々なコンポーネント(構成要素)は、注入の開始前に、所与のワークピースに応じた複数のレシピの全てに対して有利に事前調整されてよい。これにより、複数のレシピのそれぞれは、(i)単一の注入時において各ワークピースへの注入のために、または、(ii)ワークピースをワークピースサポートから取り外すことなく処理または実行されうる一連の注入ステップにおいて、選択的に採用されうる。 Additionally, the present disclosure provides for pre-tuning of an ion implantation system to multiple recipes prior to implantation. For example, various components of an ion implantation system may be advantageously pre-tuned to all of the multiple recipes for a given workpiece prior to the start of implantation, such that each of the multiple recipes may be selectively employed (i) for implantation into each workpiece during a single implantation, or (ii) in a series of implantation steps that may be processed or performed without removing the workpiece from the workpiece support.
本開示は、連続的なエネルギー分布、または、いわゆる「混合エネルギー(blended energy)」の注入を提供する。これにより、ワークピースに注入されるイオンのエネルギーは、当該ワークピースの表面を横断するイオンビームの各経路内において動的に変化させられ、かつ制御される。制御は、時変電気バイアス信号(時間変化する電気バイアス信号,例えば電圧および/または電流)を利用する。当該信号は、加速/減速ステージ(加速/減速電極とも称される)に関連する1つ以上の電源に印加されるか、その他の方法当該電源に供給される。加えて、イオンビームを走査するために、および/または、1つ以上の最終後エネルギー要素(post-final energy elements)を制御するために利用されるスキャナ波形は、例えば、加速/減速ステージに関連する1つ以上数の電源に印加される時変化電気バイアス信号にさらに少なくとも部分的に基づきうる。当該要素は、角度エネルギーフィルタ(angular energy filter)、すなわち「AEF」を含んでいてよく、典型的には屈曲要素などを含んでいる。 The present disclosure provides for the implantation of a continuous energy distribution, or so-called "blended energy," whereby the energy of ions implanted in a workpiece is dynamically varied and controlled within each path of the ion beam across the surface of the workpiece. The control utilizes a time-varying electrical bias signal, e.g., voltage and/or current, that is applied to or otherwise provided to one or more power supplies associated with the acceleration/deceleration stages (also referred to as acceleration/deceleration electrodes). In addition, scanner waveforms utilized to scan the ion beam and/or control one or more post-final energy elements may be further based at least in part on the time-varying electrical bias signal applied to one or more power supplies associated with the acceleration/deceleration stages, for example. Such elements may include an angular energy filter, or "AEF," and typically include a bending element or the like.
例えば、加速ステージまたは減速ステージに関連する1つ以上の電源に時変電圧を印加することにより、連続的に制御された可変エネルギーイオンビームを、イオン注入のためにワークピースに供給できる。加えて、イオンビームがその最終エネルギーに達すると、当該イオンビームを屈曲させる1つ以上のビーム屈曲要素は、加速/減速ステージに関連する1つ以上の電源に印加される時変電圧について「サーボオフ」されうる。これにより、可変エネルギーのイオンビームがワークピースに衝突する固定角度を維持できる。あるいは、可変エネルギーのイオンビームがワークピースに衝突する角度を連続的に変化させることができる。 For example, by applying a time-varying voltage to one or more power supplies associated with the acceleration or deceleration stages, a continuously controlled variable energy ion beam can be delivered to a workpiece for ion implantation. Additionally, once the ion beam reaches its final energy, one or more beam bending elements that bend the ion beam can be "servo-off" with respect to the time-varying voltages applied to one or more power supplies associated with the acceleration/deceleration stages. This allows a fixed angle at which the variable energy ion beam impacts the workpiece to be maintained. Alternatively, the angle at which the variable energy ion beam impacts the workpiece can be continuously changed.
一例として、1つ以上の電源に動作可能に接続されており、当該電源に1つ以上の波形を印加する波形ジェネレータを組み込むことによって、時変電圧が実現されてよい。例えば、コントローラは、それぞれの加速/減速ステージおよび/または最終後エネルギー要素に対する時変電圧を、変更する、変化させる、維持する、あるいは供給するように構成されている。 As an example, a time-varying voltage may be achieved by incorporating a waveform generator operably connected to one or more power sources and applying one or more waveforms to the power sources. For example, the controller may be configured to modify, vary, maintain, or provide a time-varying voltage to each acceleration/deceleration stage and/or final post-energy element.
一例として、本開示は、様々なハードウェア設計のために、波形、エネルギー、および較正係数を、ワークピース位置(例:イオンビームに対するワークピースの低速走査位置または垂直位置)の関数として、迅速に切り替える(スイッチングする)ことを提供している。したがって、本開示は、イオン注入サイクルにおいて使用されうる様々な他のドーズおよびエネルギーパターニング機能と互換性を有するように、十分に速い応答時間を提供する。 As an example, the present disclosure provides for rapid switching of waveforms, energies, and calibration factors as a function of workpiece position (e.g., slow scan or vertical position of the workpiece relative to the ion beam) for a variety of hardware designs. Thus, the present disclosure provides a sufficiently fast response time to be compatible with a variety of other dose and energy patterning functions that may be used in an ion implantation cycle.
上述のように、本開示によって提供されるエネルギー制御能力および調整能力は、有益であることに、処理されているワークピースのハンドリングを最小化する。例えば、複数のエネルギー注入を実現するためにワークピースがロードロックチャンバとプロセスチャンバとの間で複数回移送される従来のシステムとは対照的に、本開示はワークピースをプロセスチャンバ内かつワークピースサポート上に維持しつつ、当該ワークピースをその位置から取り外すことなく、当該ワークピースに全ての所望のエネルギーを注入できる。したがって、ハンドリングエラーまたは待ち行列時間効果(queue time effects)に起因する歩留まり損失が低くなり、イオン注入プロセスにおけるワークピーススループットが著しく増加する。 As discussed above, the energy control and adjustment capabilities provided by the present disclosure advantageously minimize handling of the workpiece being processed. For example, in contrast to conventional systems in which a workpiece is transferred multiple times between a load lock chamber and a process chamber to achieve multiple energy implants, the present disclosure maintains the workpiece within the process chamber and on the workpiece support while implanting all desired energies into the workpiece without removing the workpiece from its position. Thus, yield loss due to handling errors or queue time effects is lowered and workpiece throughput in the ion implantation process is significantly increased.
理想的であることに、本開示は、下流における加速/減速能力を有するビームライン注入装置(例:スポットビームを用いたハイブリッド走査注入装置、および、走査スポットビームまたはリボン状ビームを用いた単一ウェハ注入装置)に適している。また、エネルギー純度を維持するために、当該注入装置は、指定された所望の最終エネルギーでビームを用いて基板を選択的に注入するための、(例:オフエネルギー粒子を除去する)任意の角度エネルギーフィルタを有していてもよい。例えば、ビーム平行性のために使用される上流加速コンポーネントまたは加速後マグネットを組み込んだ注入システムは、本開示によって排除されない。ただし、当該イオン注入システムは、(i)下流コンポーネントに対する影響に起因する制限、または、(ii)電圧ベースのポスト加速(後加速)、下流加速、およびAEFベースのツールの性能に適合可能なマグネット電流において必要とされる調整の速度に起因する制限、を受ける場合がある。したがって、本開示は、本明細書において記載されている他の実施形態と同様の能力を実現するために、加速後に磁気的または静電的なビームラインコンポーネントを使用しうる代替的なビームラインを除外していない。ただし、本発明は下流の加速コンポーネントまたは減速コンポーネントを有するシステム、および/または、下流の角度屈曲コンポーネントと組み合わせたシステムにおいて、最大の利点を提供することが理解できるであろう。この場合、イオン源、引出電極、質量分析器(マスアナライザ)、スキャナ補正器、または並列化器(パラレライザ)などの上流コンポーネントの電気バイアスを変更または修正することなく、高速なエネルギー変化を実現できる。 Ideally, the present disclosure is suitable for beamline implanters with downstream acceleration/deceleration capabilities (e.g., hybrid scanning implanters with spot beams and single wafer implanters with scanning spot beams or ribbon beams). To maintain energy purity, the implanter may also have an optional angular energy filter (e.g., to remove off-energy particles) to selectively implant substrates with the beam at a specified desired final energy. For example, implantation systems incorporating upstream acceleration components or post-acceleration magnets used for beam parallelism are not excluded by this disclosure. However, such ion implantation systems may be subject to limitations (i) due to the effects on downstream components, or (ii) due to the speed of adjustments required in voltage-based post-acceleration, downstream acceleration, and magnet currents compatible with the performance of AEF-based tools. Thus, the present disclosure does not exclude alternative beamlines that may use magnetic or electrostatic beamline components after acceleration to achieve capabilities similar to other embodiments described herein. However, it will be appreciated that the present invention provides greatest benefits in systems with downstream acceleration or deceleration components and/or in combination with downstream angular bending components. In this case, fast energy changes can be achieved without changing or modifying the electrical biases of upstream components such as the ion source, extraction electrode, mass analyzer, scanner corrector, or parallelizer.
プラズマ浸漬イオン注入(Plasma Immersion Ion Implantation,PIII)またはプラズマドーピングツールを使用して、電圧ランプ(電圧傾斜)を発生させ、本発明によって提供されるドーピングプロファイルと同様のドーピングプロファイルを発生させることもできる。ただし、本明細書に記載されている本発明は、プラズマドーピングによって実際に可能であるよりもはるかに広いエネルギー範囲に亘り、質量選択種に応じて動的に調整可能な注入エネルギーに対する経路を提供することに留意されたい。 Plasma Immersion Ion Implantation (PIII) or plasma doping tools can also be used to generate voltage ramps to generate doping profiles similar to those provided by the present invention. However, it should be noted that the invention described herein provides a path to dynamically adjustable implant energies for mass-selected species over a much wider energy range than is practically possible with plasma doping.
本開示は、所定の数のエネルギー(例えば、任意の多数のエネルギー)を供給することにより、概ね混合されたボックス状ドーパントエネルギー分布を生じさせることができる。このような分布は、異なるエネルギーにおけるわずかなイオン注入経路では実現不能である。当該分布を実現するために、例えば、減速、加速、および任意の角度偏向は、ワークピースまたはイオンビームの任意の高速走査または低速走査よりも高い(例:1桁以上高い)周波数における、同期した時変電圧または時変電流によって制御される。 The present disclosure allows for the creation of a generally mixed box-like dopant energy distribution by providing a number of energies (e.g., any number of energies). Such a distribution is not achievable with only a few ion implant passes at different energies. To achieve such a distribution, for example, deceleration, acceleration, and any angular deflection are controlled by synchronized time-varying voltages or currents at frequencies higher (e.g., an order of magnitude or more higher) than any fast or slow scan of the workpiece or ion beam.
例えば、加速/減速電極に印加される電気バイアス信号または波形の形状を調整することは、ドーパントおよび/またはエネルギープロファイル調整のためのエネルギー分布のドーズ重み付けを調整するために使用されてもよい。エネルギーは、イオンビームの水平走査よりもはるかに高い周波数において混合(ブレンド)されうる。これにより、単一の水平角度調整、単一の均一性補正波形、単一の垂直角度オフセット値、およびエネルギーの混合のために使用されるドーズ基準の単一のセットを実現できる(例えば、各水平ビーム角度および垂直ビーム角度またはフラックス測定は、エネルギーの全分布を含みうる)。離散的な(ディスクリートな)方法で各エネルギーを調整する必要性を排除することにより、特有の混合ドーパントプロファイルを生じさせつつ、イオン注入システムのための総セットアップ時間を短縮できる。 For example, adjusting the shape of the electrical bias signal or waveform applied to the acceleration/deceleration electrodes may be used to adjust the dose weighting of the energy distribution for dopant and/or energy profile adjustment. Energies may be blended at a much higher frequency than the horizontal scan of the ion beam. This allows for a single horizontal angle adjustment, a single uniformity correction waveform, a single vertical angle offset value, and a single set of dose criteria used for energy blending (e.g., each horizontal and vertical beam angle or flux measurement may include the entire distribution of energies). Eliminating the need to adjust each energy in a discrete manner may reduce the total setup time for the ion implantation system while still producing a unique blended dopant profile.
本開示の1つの有利な態様は、エネルギーの複数のサブセットにおける一連の離散的なイオン注入プロセス工程によって合理的に生じうるよりも、滑らかなドーパント分布プロファイル(例:「ボックス状」プロファイルが所望される場合)を生じさせることを可能とする。 One advantageous aspect of the present disclosure allows for the production of smoother dopant distribution profiles (e.g., when a "box-like" profile is desired) than could reasonably be produced by a series of discrete ion implantation process steps at multiple subsets of energies.
したがって、本発明によれば、波ジェネレータ(wave generator)は、加速/減速カラムに印加される電圧バイアスの高周波変動を実行することによって、エネルギーが連続的に変化するイオンビームを提供する。本開示は、有利には走査ペンシルビームまたはいわゆる走査スポットビームアーキテクチャを使用して実現されてよい。この場合、イオンビームの最終エネルギーを定める単一のコンポーネントを用いて、エネルギーをスキャナの下流において変化させることができるからである。これにより、上流コンポーネントを使用してエネルギーを変化させる場合において望まれずに導入されうる調整および他の変動性に対して、多くの利点を提供できる。 Thus, in accordance with the present invention, a wave generator provides an ion beam with continuously varying energy by implementing high frequency variations in the voltage bias applied to the acceleration/deceleration column. The present disclosure may be advantageously implemented using a scanning pencil beam or so-called scanning spot beam architecture, since the energy can be varied downstream of the scanner using a single component that defines the final energy of the ion beam. This offers many advantages over tuning and other variability that may be undesirably introduced when using upstream components to vary the energy.
本開示は、ビームを再調整する必要なしに、または、ワークピースをワークピースホルダおよび/またはエンドステーションとの間で移動させる必要なしに、複数のエネルギーを注入することで、ワークピース交換または交換時間およびセットアップ時間を無くすことによって、従来のシステムに勝る生産性の利点を提供する。1つの特定の実施形態では、本開示は、加速/減速電圧および任意選択の屈曲電圧に高周波可変電源を提供することを考慮している。これにより、加速/減速電圧および屈曲電圧を同期させて、ワークピースにおけるイオンビームの一定の角度を維持する制御が提供される。その結果、連続的に制御された可変エネルギー分布がワークピースに供給される。したがって、単一の動作によってワークピースに全てのエネルギーを注入することが可能となる。このことは、第1エネルギーにおいて第1ドーズおよび/または第1角度においてワークピースへの注入を行い、第2エネルギーにおいて注入を行うようシステムを修正し、次いで、当該第2エネルギーにおいて第2ドーズおよび/または第2角度においてワークピースへの注入を行うこととは対照的である。 The present disclosure provides productivity advantages over conventional systems by eliminating workpiece exchange or exchange time and setup time by implanting multiple energies without the need to realign the beam or move the workpiece to and from the workpiece holder and/or end station. In one particular embodiment, the present disclosure contemplates providing a high frequency variable power supply for the acceleration/deceleration voltage and optional bending voltage. This provides control to synchronize the acceleration/deceleration voltage and bending voltage to maintain a constant angle of the ion beam at the workpiece. As a result, a continuously controlled variable energy distribution is delivered to the workpiece. Thus, all energies can be implanted in the workpiece in a single operation. This is in contrast to implanting the workpiece at a first dose and/or a first angle at a first energy, modifying the system to implant at a second energy, and then implanting the workpiece at a second dose and/or a second angle at the second energy.
本開示は、イオンビームおよびワークピースのうちの1つ以上が走査させられている場合に、所望の注入のための所定のエネルギー範囲において連続的に変化、変調、振動、または変動(slewing)させるためのシステムおよび方法を提供する。例えば、所定のエネルギープロファイルを生じさせために、ある波形が印加される。これにより、従来のイオン注入では得られないカスタムドーパント分布がワークピース内部において定められる。一例として、非常に多数の(例:数百個の)イオン注入エネルギーが、生産性の理由により望まれる場合がある。このような非常に多数のエネルギーは、より少数の離散的なエネルギー(例:20~30個のエネルギー)へと分解されうる。このことは、所定のエネルギー範囲において所望の結果として生じる注入プロファイルを近似することの試みとなるであろう。 The present disclosure provides systems and methods for continuously varying, modulating, oscillating, or slewing in a predetermined energy range for a desired implant as one or more of an ion beam and a workpiece are scanned. For example, a waveform is applied to produce a predetermined energy profile. This defines a custom dopant distribution within the workpiece that cannot be achieved with conventional ion implantation. As an example, a large number of ion implantation energies (e.g., hundreds) may be desired for productivity reasons. Such a large number of energies may be broken down into a smaller number of discrete energies (e.g., 20-30 energies). This would attempt to approximate the desired resulting implant profile in the predetermined energy range.
しかしながら、従来のインプラントでは、より少数の離散的なエネルギーのそれぞれに対してビームラインが調整された場合であっても、典型的に必要とされるセットアップおよび再調整(例:20~30回)は、マルチエネルギーインプラントにおけるセットアップまたは調整のためには許容できないほど顕著に長い時間に達する。加えて、従来では、各ビーム調整ステップにおいて、ワークピースが、ワークピースサポート(例:プラテン、チャック、または静電クランプ(electrostatic clamp,ESC))および/またはプロセスチャンバにおける自らの位置から取り外されることを要する場合がある。このため、処理セットアップ時間がさらに延長し、場合によっては、粒子汚染および/またはワークピースハンドリングの問題が生じる。 However, in conventional implants, even when the beamline is adjusted for each of a smaller number of discrete energies, the typically required setup and readjustment (e.g., 20-30 times) amounts to a significantly longer time than is acceptable for setup or adjustment in a multi-energy implant. In addition, conventionally, each beam adjustment step may require the workpiece to be removed from the workpiece support (e.g., platen, chuck, or electrostatic clamp (ESC)) and/or from its position in the process chamber, further extending processing setup times and potentially creating particle contamination and/or workpiece handling issues.
対照的に、本開示によれば、エネルギーが連続的に変動するかまたは動的に変更されるので、ビームラインの1つの設定のみが実行される。例えば、5KeVから25KeVまでの注入エネルギーが望まれる場合、従来の注入プロセスはイオンビームを通るワークピースの9個の離散的な経路へと分割されうる。そして、各パス間の離散的なステップ(例:5KeV;7.5KeV;10KeV;12.5KeV;15KeV;17.5KeV;20KeV;22.5KeV;25KeV)においてエネルギーが変化させられる。しかしながら、より典型的には、各経路間において必要とされる顕著に長いセットアップ時間を考慮すると、所望の5KeVから25KeVまで注入は、例えば5KeV、15KeV、および25KeVという3つの注入ステップまでにしか分割されないであろう。結果として、受け入れられない可能性が高い、比較的不均一な集約されたドーパントプロファイルがもたらされる場合がある。 In contrast, according to the present disclosure, only one setting of the beamline is performed as the energy is continuously varied or dynamically changed. For example, if an implant energy from 5 KeV to 25 KeV is desired, a conventional implant process may be divided into nine discrete passes of the workpiece through the ion beam, with the energy being changed in discrete steps between each pass (e.g., 5 KeV; 7.5 KeV; 10 KeV; 12.5 KeV; 15 KeV; 17.5 KeV; 20 KeV; 22.5 KeV; 25 KeV). However, more typically, given the significantly longer setup time required between each pass, a desired 5 KeV to 25 KeV implant would only be divided into three implant steps, e.g., 5 KeV, 15 KeV, and 25 KeV. The result may be a relatively non-uniform aggregate dopant profile that is likely to be unacceptable.
しかしながら、本開示は、所定のエネルギー範囲において、所定の方法でワークピースに対するイオンビームの単一経路においてエネルギーを常に変化させることによって、従来認識されていたよりも著しく均一な注入エネルギープロファイルを提供している。「常に(constantly)」および「連続的に(continuously)」という用語は、ワークピースに対するイオンビームの単一経路に沿ったエネルギーの変化または変動を意味することを意図しており、様々な連続的な/またはステップ状の波形または増分を含みうることに留意されたい。したがって、イオンビームがワークピースに対して掃引される場合、エネルギーが高レートで変化させられる。例えば、ワークピース上の全ての位置が変化するエネルギーの全てに曝されるように、変化は十分に高い周波数における一定の振動または変化であってよい。結果として得られる集約的または総合的なエネルギープロファイルは、はるかに均一または「ボックス状(box-like)」である。 However, the present disclosure provides a much more uniform implant energy profile than previously realized by constantly varying the energy in a predetermined manner over a predetermined energy range and in a single pass of the ion beam over the workpiece. Note that the terms "constantly" and "continuously" are intended to mean changes or variations in energy along a single pass of the ion beam over the workpiece and may include various continuous and/or stepped waveforms or increments. Thus, as the ion beam is swept over the workpiece, the energy is changed at a high rate. For example, the change may be a constant oscillation or change at a sufficiently high frequency so that all locations on the workpiece are exposed to all of the varying energy. The resulting aggregate or total energy profile is much more uniform or "box-like."
一例として、ビームは、約41Hzの水平走査速度において、ワークピースを横断するように、第1軸に沿っていわゆる高速走査方向(ファストスキャン方向,例:水平方向)に移動しうる(例:静電走査されうる)。したがって、例えば、ビームの水平運動は、ワークピースを横断する約1000ステップとして量子化されうる。低速走査方向(スロースキャン方向,例:垂直方向)では、ワークピースは第2軸に沿って移動させられうる(例:機械的に走査されうる)。このように、垂直走査速度は、水平走査速度に比べて著しく遅い。この例では、所望の可変エネルギー周波数は、高速走査周波数よりも著しく高く、(例えば、電源の選択に基づいて)KHzまたはMHzのオーダでありうる。本開示では、イオンビームがワークピースを横断する次の横断方向に進むことに先立ち、エネルギー範囲の完全な掃引が実行さわれることが一般的には望ましいと考えている。その結果、所望のエネルギーの全てが、ワークピースの各x位置および各y位置に注入される。例えば、イオンビームに対するワークピースの連続的な運動が個々の量子化ビットへと分解されるとみなすことができる場合、ワークピースを横断する各位置は画素(ピクセル)とみなすことができる。 As an example, the beam may be moved (e.g., electrostatically scanned) along a first axis in a so-called fast scan direction (e.g., horizontal direction) across the workpiece at a horizontal scan rate of about 41 Hz. Thus, for example, the horizontal movement of the beam may be quantized as about 1000 steps across the workpiece. In the slow scan direction (e.g., vertical direction), the workpiece may be moved (e.g., mechanically scanned) along a second axis. Thus, the vertical scan rate is significantly slower than the horizontal scan rate. In this example, the desired variable energy frequency is significantly higher than the fast scan frequency, which may be on the order of KHz or MHz (e.g., based on the power supply selection). It is contemplated in the present disclosure that it is generally desirable to perform a complete sweep of the energy range before the ion beam advances in the next traverse direction across the workpiece. As a result, all of the desired energy is implanted at each x- and y-position of the workpiece. For example, if the continuous motion of the workpiece relative to the ion beam can be considered to be resolved into individual quantized bits, then each position across the workpiece can be considered a picture element (pixel).
このように、本開示は、走査させられるワークピースの全体に対して注入される所望の範囲のエネルギーの全てを提供する。これにより、任意の数の異なるエネルギーを、ワークピース全体に均一にドーピングできる。例えば、それぞれの電気バイアス信号は、(例えば、アクセル/ディセル(accel/decel)装置とも称される)加速/減速(acceleration / deceleration)装置を制御し、ビームの屈曲装置(例えば、ベンド装置とも称される)を制御することもできる。例えば、それぞれの電圧が純粋な三角形波形であるとみなすことができる場合、波形に沿ったエネルギーステップのそれぞれにおいて均一なドーズを提供できる。波形は、このような連続体に沿って異なるエネルギー間隔において相対ドーズを変化させるように、さらに調整されてよい。したがって、例えば、エネルギーについて誘起された波形は、その拡散または所与の走査におけるエネルギーの相対濃度を変化させうる。 In this manner, the present disclosure provides for all of the desired range of energies to be implanted across the entire workpiece being scanned. This allows any number of different energies to be uniformly doped across the workpiece. For example, each electrical bias signal may control an acceleration/deceleration device (e.g., also referred to as an accel/decel device) and may also control a beam bending device (e.g., also referred to as a bend device). For example, if each voltage can be considered to be a pure triangular waveform, a uniform dose can be provided at each energy step along the waveform. The waveform may be further adjusted to vary the relative dose at different energy intervals along such a continuum. Thus, for example, the waveform induced for the energies may vary the spread or relative concentration of the energies in a given scan.
本開示の様々なコンセプトの一般的な概観を提供するために、図1は、連続的に制御される可変エネルギーを有するイオンを注入するためのシステム100の一例を示す。一例によれば、システム100は、イオン源102を備える。当該イオン源は、イオンビーム104を発生させるためにドーパント材料をイオン化するように構成されている。ビームラインアセンブリ106は、イオン源102の下流に配置されている。当該ビームラインアセンブリは、エンドステーション112内のワークピースサポート110(例:チャック)上に配置されているワークピース108に向けてイオンビーム104を輸送するように構成されている。
To provide a general overview of various concepts of the present disclosure, FIG. 1 illustrates an example of a
一例として、加速/減速ステージ114がさらに設けられている。当該加速/減速ステージは、イオンビーム104の輸送時に当該イオンビームを受け入れて、エンドステーション112内に選択的に配置されたワークピース108への注入のために、連続的に制御された可変エネルギーイオンビーム116を生じさせるように構成されている。一例として、1つ以上の可変電源118,120(例:1つ以上の電源)は、加速/減速ステージ114に動作可能に接続されている。当該可変電源は、1つ以上の電気バイアス信号122,124(例:電圧または電流)をそれぞれ当該加速/減速ステージに供給する。
Illustratively, an acceleration/
例えば、イオンビーム104が加速/減速ステージ114を通過するときに、1つ以上の電気バイアス信号122、124が、当該イオンビームの上下に配置された1つ以上の電極128に印加される。例えば、加速/減速ステージ114は、1つ以上の加速/減速電極128と、1つ以上の屈曲電極126,130と、を含みうる。この場合、加速/減速電極に印加される電気バイアス信号122は、連続的に制御された可変エネルギーイオンビーム116を生じさせる。そして、屈曲電極に印加される電気バイアス信号124は、イオンビーム104の連続的な角度制御を生じさせる。例えば、1つ以上の電気バイアス信号122,124は、1つ以上の電源118,120に動作可能に接続された1つ以上の波形ジェネレータ132,134を介して、さらに選択的に変化させられて、1つ以上の波形136,138(例:1つ以上の時変信号)を提供する。コントローラ140(例:1つ以上の制御装置を備える制御システム)は、1つ以上の電源118,120および1つ以上の波形ジェネレータ132,134の制御を通じて、1つ以上の電気バイアス信号122,124を選択的に制御するために、さらに提供されている。以下にさらに説明する通り、コントローラ140は、(i)ワークピースサポート110などのシステム100の他の態様と、(ii)ビーム走査機構、集束・ステアリング要素、または他のビーム制御構コンポーネントなどのビームラインアセンブリ106の他のコンポーネントと、を制御するように、さらに動作可能である。
For example, as the
一例として、コントローラ140と1つ以上の電源118,120と1つ以上の波形ジェネレータ132,134との間の制御およびフィードバック信号142は、イオンビーム104のエネルギーを選択的に制御して変化させることにより、連続的に制御された可変エネルギーイオンビーム116を定める。例えば、加速/減速電極128に供給される電気バイアス信号122(例:減速電圧)の制御は、波形ジェネレータ132から電源118に供給される波形136に基づいて、イオンビーム104のエネルギーを選択的に変化(増加および減少)させうる。したがって、加速/減速電極に関連する電圧差が定められる。同様に、屈曲電極130に供給される電気バイアス信号124の制御は、波形ジェネレータ134から電源120に供給される波形138に基づいて、イオンビーム104を選択的に上向きまたは下向きに屈曲させることができる。
As an example, the control and feedback signals 142 between the
例えば、イオンビーム104の加速/減速および屈曲を制御する場合に、1つ以上の電気バイアス信号122,124の極性が切り替えられてもよい。例えば、屈曲電極130および加速/減速電極128に供給される様々な異なる電圧を用いてステッピングする場合に、連続的に制御される可変エネルギーイオンビーム116における異なるエネルギーを得ることができる。例えば、以下にてより詳細に説明する通り、波形136,138のそれぞれは、(例えば、いわゆる低速走査方向またはx軸に沿って)ワークピース108の機械的走査のステップサイズに同期させられうる。同様に、連続的に制御される可変エネルギーイオンビーム116のエネルギーが変化する場合に、連続的に制御される当該可変エネルギーイオンビームとワークピース108との間の角度関係が一定に維持されるように、屈曲電極130に印加される電気バイアス信号124(例:屈曲電圧)が変化させられうる。さらに、電気バイアス信号124の制御を介して連続的に制御される当該可変エネルギーイオンビームの116エネルギーが変更される場合に、連続的に制御される当該可変エネルギーイオンビームとワークピース108との間の角度関係が変化させられてもよい。
For example, the polarity of one or more of the electrical bias signals 122, 124 may be switched when controlling the acceleration/deceleration and bending of the
別の例では、イオンビーム104が(例えば、いわゆる高速走査方向またはy軸に沿って)静電的または磁気的に往復走査させられる場合に、加速/減速電極128および/または屈曲電極130における電気バイアス信号122,124の1つ以上の変動期間(例:1つ以上の波形136、138に基づく電圧変動の1つ以上の期間)はイオンビームの走査の方向の反転に先立ち、または、反転時に完了しうる。例えば、連続的に制御される可変エネルギーイオンビーム116は、加速/減速電極128および/または屈曲電極130における電気バイアス信号122,124の同期を介して、変化させられ、循環させられ、または変調される「エネルギー走査」を定めることができる。例えば、エネルギー走査は、イオンビーム104の高速走査方向の走査に比べて実質的に高い周波数において変化させられる。
In another example, when the
したがって、加速/減速電極126および屈曲電極130に供給または提供される電気バイアス信号122,124は、ワークピース108への注入時に実現されるエネルギーの均一な分布をもたらすために、同期または他の方法によって制御されてよい。例えば、図2Aに示されている三角形波形145はエネルギーの変動または変調における実質的に小さい「ステップ」の単一の周期とみなすことができる。各ステップにおいて同じ時間量が提供されるので、三角形波形に実質的に類似する均一なエネルギープロファイルが実現されうる。図2Aに示す例では、所定の範囲のエネルギーの約100回の走査が、ワークピースまたはウェハの表面を横断するイオンビームの「高速走査」「ステップ」におけるイオンビームの各走査内において完了されうる。
Thus, the electrical bias signals 122, 124 supplied or provided to the acceleration/
各電圧において費やされる時間がともに加算される場合、各電圧は、それぞれの時間に亘り、波形内に存在している。それゆえ、本開示に従って複数のエネルギー(例:5KeV,5.1KeV,5.2KeV…24.9KeV,25KeV)が注入される場合、複数のエネルギーのそれぞれは、最低エネルギー(例:5KeV)から最高エネルギー(例:25KeV)まで、同じ時間に亘り注入される。純粋な三角形波形が利用されない場合、例えば、波形の導関数は、所与の電圧における滞留時間に等しいとみなすことができる。例えば、図2Bに示される波形150は、より高いエネルギーにおいて、より長い時間が費やされ、最大減速電圧(例:最低エネルギー)に達すると、次のエネルギーに移行する前に、より低いそのエネルギーにおいてより少ない時間が費やされることを示す。したがって、例えば、ワークピース内の注入プロファイルは、より低いエネルギーに比べて、より高いエネルギーの範囲において、より大きい線量を有するように設計されうる。
When the time spent at each voltage is added together, each voltage is present in the waveform for its respective time. Thus, when multiple energies (e.g., 5 KeV, 5.1 KeV, 5.2 KeV...24.9 KeV, 25 KeV) are implanted in accordance with the present disclosure, each of the multiple energies is implanted for the same time from the lowest energy (e.g., 5 KeV) to the highest energy (e.g., 25 KeV). If a purely triangular waveform is not utilized, for example, the derivative of the waveform can be considered to be equal to the dwell time at a given voltage. For example, the
本開示は、例えば、ワークピースを横断するイオンビームの1回の通過とほぼ同時に、または同時に、異なるドーズにおいて、異なるエネルギーの任意に多数の異なるプロセスステップを注入する能力を提供する。生産環境において、例えば、従来のプロセスにおける注入の数は、同じマスクに3つの異なるドーズにおいて3つのエネルギーを注入し、次いで、ワークピースに対する特定のドーパントプロファイルを実現するために、後続のアニールステップに依存して制限される場合がある(例えば、時間またはコストの制約などの生産上の理由による)。しかしながら、本開示では、ワークピース上に形成されるデバイスの利益のために、ワークピース中のドーパント濃度のより滑らかなプロファイルが望ましいと理解している。ただし、従来のプロセスフローにエネルギーが加えられるたびに、生産性の損失などのコストが加えられる。本開示は、プロセスステップごとにいかなる追加コストも実質的に伴うことなく、エネルギーおよびドーズの任意の数の組み合わせを提供できる。したがって、本開示は、この追加コストを回避している。 The present disclosure provides the ability to implant an arbitrary number of different process steps at different energies at different doses, for example, nearly simultaneously or simultaneously with one pass of the ion beam across the workpiece. In a production environment, for example, the number of implants in a conventional process may be limited (e.g., due to production reasons such as time or cost constraints) by implanting three energies at three different doses in the same mask and then relying on a subsequent annealing step to achieve a particular dopant profile for the workpiece. However, the present disclosure understands that a smoother profile of dopant concentration in the workpiece is desirable for the benefit of the device formed on the workpiece. However, each time energy is added to a conventional process flow, costs are added, such as lost productivity. The present disclosure can provide any number of combinations of energy and dose without substantially any additional cost per process step. Thus, the present disclosure avoids this additional cost.
本開示は、例えば、有利であることに、注入されたイオンによってもたらされる所望のデバイス特性に対応するように、(例えば、注入のエネルギーに対応する)ワークピース内のドーパント濃度、角度分布、および/またはイオン注入深さを制御できる。例えば、研究および設計(research and design,R&D)は、所与の注入深さにおいて特定のドーパント濃度を要する所望のR&D注入プロファイルをもたらすために、様々なモデルを使用して仕様を定式化している場合がある。この場合、当該仕様は、ワークピースへの多数の注入(例えば、9回または10回の注入)を要する。しかしながら、生産環境では、様々な生産上の懸念(例えば、時間、ウェハハンドリング、および各注入に関連するコスト)に起因して、限られた数の注入のみ(例えば、2回または3回の注入のみ)が、ワークピースに対して実行されることが許容される場合がある。したがって、ワークピースにおける所望のR&D注入プロファイルを実現するために多数の注入を実行することに替えて、許容される限られた注入の数の範囲内で、所望のR&D注入プロファイルの近似を試みた注入プロファイルを実現するために、様々な妥協がなされることが典型的である。しかしながら、本開示は、有益であることに、そのような近似および妥協を行う必要なく、所望のR&D注入プロファイルおよびドーパント濃度をもたらす。 The present disclosure, for example, advantageously allows for control of dopant concentration, angular distribution, and/or ion implantation depth within a workpiece (e.g., corresponding to the energy of the implant) to correspond to desired device characteristics resulting from the implanted ions. For example, research and design (R&D) may formulate specifications using various models to produce a desired R&D implant profile that requires a particular dopant concentration at a given implant depth. In this case, the specification calls for multiple implants (e.g., 9 or 10 implants) into the workpiece. However, in a production environment, due to various production concerns (e.g., time, wafer handling, and costs associated with each implant), it may be acceptable for only a limited number of implants (e.g., only 2 or 3 implants) to be performed on the workpiece. Thus, instead of performing multiple implants to achieve the desired R&D implant profile in the workpiece, various compromises are typically made to achieve an implant profile that attempts to approximate the desired R&D implant profile within the limited number of implants allowed. However, the present disclosure advantageously results in desired R&D implant profiles and dopant concentrations without the need to make such approximations and compromises.
図2Cには、本開示に係る別の例示的な波形160が示されている。図2Cの例では、波形は、変化する持続時間の複数のステップを含んでいる。この場合、複数のエネルギーが単一サイクルにおいて注入される。複数のエネルギーは、(例えば、3つのエネルギーに)制限される場合がある。その結果、波形は、電圧の複数のステップによって中断される複数の概ね平坦な部分を有するものとして描写されうる。単純な例では、第1の(最初の)長い平坦部分と、短いステップと、後続する別の長い平坦部分と、短いステップと、さらに後続するさらなる長い平坦部分と、によって、3つの離散的なエネルギーが実現されうる。この例では、3つの全てのエネルギーが、単一の注入サイクルにおいて注入されうる。例えば、3つのエネルギーにおいて注入されるドーズの全てがともに加算されるので、総ドーズは1.5e14に設定されうる。したがって、ワークピースをワークピースサポートおよびプロセスチャンバまたはエンドステーションから取り外すことなく、3つの全てのエネルギーがワークピースに注入されうる。したがって、ワークピースは、ステップ間における大気曝露に曝されない。そして、ワークピースは、当該ワークピースのミスアライメント(位置合わせ不良)および/または潜在的に壊滅的な落下を誘発するおそれがあるワークピースハンドリングハードウェアまたは処理ステップに曝されない。
2C shows another
さらに、本開示に係る注入エネルギーレベルは連続的に掃引されているので、プロファイラ(例:ファラデーカップ)は、本明細書に記載されているエネルギーの変化よりも実質的に遅く移動しうる。そして、イオンビームの平均フラックスは、全てのエネルギーを含めて、各位置において測定されうる。このように、本開示は、均一性および角度などに応じてイオン注入システムを調整するために、たった1つの初期セットアップ時間によって実現されうる。さらに、本開示は、イオンビームの最終エネルギーを実現するための加速または減速のいずれかを含んだシステムにおいて実現されうる。例えば、最終エネルギーを設定する電源の極性は、所望の通り加速または減速を生じさせるように切り替えられてよい。 Furthermore, since the implant energy levels according to the present disclosure are swept continuously, the profiler (e.g., Faraday cup) may be moved substantially slower than the change in energy described herein, and the average flux of the ion beam may be measured at each position, including all energies. In this manner, the present disclosure may be implemented with only one initial setup time to adjust the ion implantation system for uniformity, angle, etc. Furthermore, the present disclosure may be implemented in a system that includes either acceleration or deceleration to achieve the final energy of the ion beam. For example, the polarity of the power supply that sets the final energy may be switched to produce acceleration or deceleration as desired.
したがって、本開示は、加速/減速ステージ114(例:注入される前のイオンビーム104の最終的な加速または減速のための機構)に印加される電圧に時変信号を与えることによって、図1のワークピース108に注入されるイオンのエネルギーの高周波リアルタイム制御を提供する。これにより、ワークピース108における所定のエネルギー分布を生じさせることができる。1つ以上の波形136,138に関連する時変信号は、ワークピース108に対する任意の所望のエネルギープロファイルをもたらするように有利に制御されうる、いかなる所望の波形をも含みうることに留意されたい。
Thus, the present disclosure provides high frequency real-time control of the energy of ions implanted into the
1つ以上の波形ジェネレータ132,134は、例えば、ステップ、一連のステップ関数、曲線(カーブ)、またはランダム化された形態さえも含む任意の所望の形態など、任意の所望の波形を提供するようにプログラムされてよい。この場合、波形はコントローラによって制御される。したがって、所望のドーパント濃度および/またはエネルギープロファイルを提供することが可能となる。この場合、ワークピース108において所望のドーパント濃度および/またはエネルギープロファイルを提供できるよう、波形が設計(デザイン)されてよい。一般的には、x-y軸において観察される波形(xは時刻であり、yは加速/減速ステージ114に印加される電圧である)では、任意の所与の時間において、電圧がエネルギーを生じさせる。その結果、電圧波形は、エネルギーの分布を定める。例えば、エネルギーの分布の導関数(derivative)は、エネルギーレベル毎の相対ドーズをもたらす。所与のエネルギーを確認するために必要な所与の電圧における時間のパーセンテージは、当該エネルギーにおいて実現されるであろう総注入ドーズの割合(比率)である。
The one or
図2Aおよび図2Bは、加速/減速電極128および屈曲電極130によるイオンビーム104の加速または減速の両方を制御するために同期させられている2つの波形145,150を示す。例えば、イオンビーム104の屈曲は、ワークピース108に対するイオンビーム104の一定の角度を維持するために、屈曲電極130に印加される電気バイアス信号124を介して同期させられる。したがって、例えば、加速/減速電極128および屈曲電極130に対する電気バイアス信号122,124は、それぞれの波形ジェネレータ132,134間に同期信号を供給することによって同期させられてもよいし、あるいは単一の波形ジェネレータによって同期させられてもよい。図示されていないが、本開示は、例えば1つの波形ジェネレータが実装されることをさらに考慮している。この場合、単一の波形ジェネレータの極性を分割して、加速/減速電極128および屈曲電極126,130に対して、個別の所望の電気バイアスを供給できる。
2A and 2B show two
したがって、ワークピース108における任意の所与の点(位置)において所定のエネルギー分布を実現するために、コントローラ140は、加速/減速電極128および屈曲電極126,130に対する電気バイアス信号122,124を、所定の様式によって制御してよい。代替的には、本発明はイオンビーム104の屈曲を伴うことなく実現されてもよい。この場合、ワークピース108における任意の所与の点において所定のエネルギー分布を実現するために、コントローラ140は、加速/減速電極128に対する電気バイアス信号122を、所定の様式によって制御してよいことが理解できる。さらなる一例によれば、エネルギー分布は、ワークピース108上の位置に基づいて変化しない。
Thus, to achieve a predetermined energy distribution at any given point (position) on the
このように、本開示は、イオン注入システム内のイオンビームのエネルギーを変化させるためのシステム、装置、および方法を全般的に対象としている。より具体的には、本開示は、イオンビームがワークピースを横断するように走査させられるときに、当該イオンビームのエネルギーを変化させるためのシステム、装置、および方法を対象としている。 Thus, the present disclosure is generally directed to systems, apparatus, and methods for varying the energy of an ion beam in an ion implantation system. More specifically, the present disclosure is directed to systems, apparatus, and methods for varying the energy of an ion beam as the ion beam is scanned across a workpiece.
本開示は、様々な注入装置のアーキテクチャにおける実装に適用可能であり、かつ、そのような実装が考慮されている。例えば、本開示は、少なくとも3つのタイプのイオン注入装置に適用可能である。1つ目のタイプのイオン注入装置では、リボンイオンビームがビームラインに沿って画定および輸送される。この場合、当該リボンビームはワークピースの幅よりも大きい長さ寸法を有しており、当該ワークピースは当該リボンビームの正面において、その長さ寸法を実質的に横断するように走査させられる。2つ目のタイプのイオン注入装置では、比較的静的な断面寸法を有するイオンビーム(例:ペンシルビームまたはスポットビーム)が使用される。この場合、ワークピースが当該イオンビームに対して2次元的に移動させられる。3つ目のタイプのイオン注入装置では、ハイブリッドシステムが使用される。この場合、ペンシルイオンビームまたはスポットイオンビームがワークピースに対して第1方向に沿って振動または走査させられて、リボン形状の走査ビームが形成される。そして、ワークピースに対する全体的な注入のために、当該ワークピースが第1方向と交差する第2方向に沿って移動させられる。 The present disclosure is applicable to and contemplates implementation in a variety of implanter architectures. For example, the present disclosure is applicable to at least three types of ion implanters. In one type of ion implanter, a ribbon ion beam is defined and transported along a beamline, where the ribbon beam has a length dimension greater than the width of the workpiece, and the workpiece is scanned substantially across the length dimension in front of the ribbon beam. In a second type of ion implanter, an ion beam having a relatively static cross-sectional dimension (e.g., a pencil beam or spot beam) is used, where the workpiece is moved two-dimensionally relative to the ion beam. In a third type of ion implanter, a hybrid system is used, where a pencil ion beam or spot ion beam is oscillated or scanned relative to the workpiece along a first direction to form a ribbon-shaped scanned beam, and the workpiece is then moved along a second direction intersecting the first direction for global implantation of the workpiece.
イオン注入プロセスにおけるエネルギー分布についての本開示の可変制御、特に、ターゲットワークピースの表面における連続的な様式での注入エネルギーの可変制御は、これまで開示または考慮されていなかった。したがって、本開示は、イオンビームによって注入されたイオンのエネルギー分布をワークピースにおいて連続的な様式によって変化させるためのシステム、装置、および方法を提供する。 The present disclosure's variable control of energy distribution in an ion implantation process, and in particular variable control of implant energy in a continuous manner at the surface of a target workpiece, has not previously been disclosed or contemplated. Accordingly, the present disclosure provides systems, apparatus, and methods for varying the energy distribution of ions implanted by an ion beam in a continuous manner at the workpiece.
上述の用途は、本開示の連続的かつ可変なエネルギーイオン注入システムおよび方法によって実現される様々なプロセスおよび用途のうちの1つにすぎないことが理解されるであろう。本開示およびクレームは、この問題の解決策に限定されず、任意の形状または特定の所定のコンター(輪郭)での可変エネルギー注入をワークピースに対して提供するためのプロセスにも限定されない。本開示の可変かつ連続的かつ不均一なイオンエネルギー注入プロセスは、非連続可変注入深さプロファイルに加えて、連続可変注入深さプロファイルを提供するために、所望の任意の様式によって実行されてよい。例えば、本開示は、イオン注入エネルギーの選択的変化を介して、可変イオン注入深さが所望される任意の所望の用途に利用されうると考慮している。異なるエネルギーでの注入を実行する多くの理由が存在しうる。異なるエネルギーでの注入は、ワークピースの表面における異なるイオン注入深さと言い換えられる。異なるエネルギーでの注入は、ワークピースにおける閾値電圧の変動、ワークピースの走査幅におけるインプラントのエネルギープロファイルの系統的なプロファイル変化、および単一のウェハに異なる電気特性の複数のダイを注入する能力を含むが、これらに限定されない。 It will be appreciated that the above-mentioned application is but one of a variety of processes and applications that may be realized by the continuous and variable energy ion implantation system and method of the present disclosure. The present disclosure and claims are not limited to a solution to this problem, nor to a process for providing a variable energy implant in a workpiece with any shape or specific predetermined contour. The variable, continuous, and non-uniform ion energy implantation process of the present disclosure may be performed in any desired manner to provide a continuously variable implantation depth profile, in addition to a non-continuously variable implantation depth profile. For example, the present disclosure contemplates that a variable ion implantation depth may be utilized in any desired application in which variable ion implantation depth is desired through selective variation of ion implantation energy. There may be many reasons to perform implants at different energies. Implants at different energies translate to different ion implantation depths at the surface of the workpiece. Implants at different energies include, but are not limited to, threshold voltage variation in the workpiece, systematic profile variation of the implant energy profile across the scan width of the workpiece, and the ability to implant multiple dies of different electrical characteristics on a single wafer.
図3は、例示的なイオン注入システム200を示す。図3の例において、イオンビームエネルギーは、本明細書において説明されている通り、選択的に変更および/または制御されうる。システム200は、ターミナル202と、ビームラインアセンブリ204と、エンドステーション206とを有している。ターミナル202は、高電圧電源210によって給電されるイオン源208を含んでいる。イオン源208は、イオンビーム212を発生させ、当該イオンビームをビームラインアセンブリ204へと導く。この点に関して、イオン源208は、荷電イオンを発生させる。当該荷電イオンは、引出アセンブリ214を通じて当該源から引き出され、イオンビーム212へと形成される。続いて、イオンビームは、ビームラインアセンブリ204内のビーム経路に沿って、エンドステーション206へと導かれる。
3 illustrates an exemplary
イオンを発生させるために、イオン化されるべきドーパント材料(不図示)が、イオン源208の発生チャンバ216内に供給される。例えば、ドーパント材料は、ガス源(不図示)からチャンバ216内に供給されてよい。一例として、電源210に加えて、任意の数の適切な機構(不図示)を使用して、イオン発生チャンバ216内の自由電子を励起できることが理解されるであろう。当該機構の例としては、RFまたはマイクロ波の励起源、電子ビーム注入源、電磁源、および/または、チャンバ内にアーク放電を発生させるカソードなどが挙げられる。励起された電子がドーパントガス分子と衝突することによって、イオンが発生する。一般的には正イオン(陽イオン)が発生するが、本開示は負イオン(陰イオン)が発生するシステムにも適用可能である。
To generate ions, a dopant material (not shown) to be ionized is provided in the
イオンは、イオン引出アセンブリ214によって、チャンバ216内のスリット218を通じて制御可能に引き出される。当該イオン引出アセンブリは、複数の引出電極および/または抑制電極220を備える。例えば、イオン引出アセンブリ214は、発生チャンバ216から引き出されたイオンを加速するために引出電極および/または抑制電極220をバイアスするための個別の引出電源(不図示)を含んでいてよい。イオンビーム212は、同様の荷電粒子(同様に荷電された粒子)を含んでいる。このため、当該イオンビームの内部において、同様の荷電粒子は互いに反発する。それゆえ、当該イオンビームは、半径方向外向きに拡張する傾向、すなわち、ビーム「ブローアップ」する傾向を有しうることが理解されるであろう。このブローアップ(吹き上がり)という現象は、低エネルギーで高電流の(例:高パーヴェンスの)ビームにおいて悪化しうることも理解されるであろう。当該ビームでは、多くの同様の荷電粒子は比較的低速で同一方向に移動し、複数の粒子間に多くの反発力が存在しているが、ビーム経路の方向における当該粒子の移動を維持するための粒子運動量がほとんど存在していないからである。
Ions are controllably extracted through a slit 218 in the
したがって、一般的には、イオンビーム212が高エネルギーで引き出され、当該イオンビームがブローアップしないように(例:粒子が、ビームブローアップを招きうる反発力に打ち勝つために十分な運動量を有するように)、引出アセンブリ214が構成されている。さらに、一般的には、システム全体に亘り比較的高いエネルギーにおいてビーム212を輸送することが有利である。この場合、当該エネルギーは、ワークピース222へのイオンの注入の直前に、所望の通り低減されうる。これにより、ビーム閉じ込めを促進できる。そして、分子イオンまたはクラスターイオンを発生させ、当該イオンを輸送することも有利となりうる。分子またはクラスターのエネルギーは、分子のドーパント原子間において分割される。このため、分子イオンまたはクラスターイオンは比較的高いエネルギーにおいて輸送されうるが、より低い等価エネルギーにおいて注入される。
Thus, in general, the
図3に示されている例示的なイオン注入システムでは、ビームラインアセンブリ204は、ビームガイド224と、質量分析器(マスアナライザ)226と、走査システム228と、パラレライザ(平行化器)230と、1つ以上の加速または減速および/またはフィルタリングのサブシステム232と、を含んでいる。質量分析器226は、約90°の角度を有するように構成されている。質量分析器226は、当該質量分析器の内部に(双極子)磁界を発生させる役割を果たす1つ以上のマグネット(不図示)を含んでいる。イオンビーム212が質量分析器226に入ると、そのことに応じて、所望のイオンがビーム経路を下って輸送されるよう、当該イオンビームが磁界によって屈曲させられる。その一方、不適切な電荷対質量比のイオンは拒絶される(受け付けられない)。より具体的には、過大または過少な電荷対質量比を有するイオンが、質量分析器226の側壁234へとステアリングされるように、当該イオンが不十分にまたは過度に偏向させられる。このように、質量分析器は、所望の電荷対質量比を有するビーム212内のイオンが当該質量分析器を通って、分解開口236を経由して当該質量分析器から出ることを許容している。
In the exemplary ion implantation system shown in FIG. 3, the
走査システム228がさらに図示されている。例えば、走査システムは、走査要素238と、集束および/またはステアリング要素240と、を含んでいる。走査システム228は、様々な公知の走査機構を含んでいてよい。当該走査機構は、複数の米国特許、例えば、Berrianらの4,980,562、Dykstraらの5,091,655、Glavishの5,393,984、Benvenisteらの7,550,751、および、Vanderbergらの7,615,763に示されている。これらの文献の全体は、参照により本明細書に組み込まれる。
Also shown is a
例示的な走査システム228では、それぞれの電源242,244は、走査要素238および集束・ステアリング要素240に(より具体的には、それらの内部に位置するそれぞれの電極238a,238bおよび240a,240bに)動作可能に接続されている。集束・ステアリング要素240は、比較的狭いプロファイルを有する質量分析後イオンビーム212(例:図示されているシステム200における「ペンシル」または「スポット」ビーム)を受け入れる。電源244によってプレート240aおよび240bに印加される電圧は、走査要素238の最適点、好ましくは走査要素238の走査頂点246にイオンビームを集束させ、当該イオンビームをステアリングするように作用する。そして、電源242(例えば、電源244は電源242としての役割を果たすこともできる)によってスキャナプレート238aおよび238bに印加される電圧波形は、ビーム212を前後に走査して、当該ビーム212を細長い走査ビームまたはリボン形状のビーム(例:走査ビーム212)へと広げる。当該走査ビーム212は、対象のワークピースと少なくとも同等の幅またはより広い幅でありうる、x軸における幅または長さ方向の寸法を有する。走査頂点246は、各ビームレットまたはリボンビームの走査部分が走査要素238によって走査された後に発生するように見える光路内の点として定められうることができることが理解されるであろう。
In the
本明細書において説明されているタイプのイオン注入システムは、異なるタイプの走査システムを採用しうることが理解されるであろう。例えば、本発明では、静電システムまたは磁気システムが採用されてよい。静電走査システムの典型的な実施形態は、スキャナプレートまたは電極238aおよび238bに接続された電源を含んでいる。この場合、スキャナ238は走査ビームを供給する。スキャナ238は、比較的狭いプロファイルを有する質量分析イオンビーム(例えば、例示されているシステムでは「ペンシル」ビーム)を受け入れる。そして、電源242によってスキャナプレート238aおよび238bに印加される電圧波形は、当該ビームをX方向(走査方向)において前後に走査して、当該ビームを細長いリボン形状のビーム(例:走査ビーム)へと広げる。当該走査ビームは、対象のワークピースと少なくとも同等の幅またはより広い幅でありうる、有効X方向幅を有する。同様に、磁気走査システムでは、高電流源が電磁石のコイルに接続される。磁界は、ビームを走査するように調整される。本開示の目的に関して、全ての異なるタイプの走査システムが考慮されている。本明細書に記載されている静電システムは、説明の目的のためにのみ使用されている。
It will be appreciated that ion implantation systems of the type described herein may employ different types of scanning systems. For example, the present invention may employ electrostatic or magnetic systems. A typical embodiment of an electrostatic scanning system includes a power supply connected to scanner plates or
次いで、走査ビーム212は、パラレライザ230を通過する。様々なパラレライザシステム230が、複数の米国特許、例えば、Dykstraらの5,091,655、Dykstraらの5,177,366、Inoueの6,744,377、Rathmellらの7,112,809、およびVanderbergらの7,507,978に示されている。これらの文献の全体は、参照により本明細書に組み込まれる。その名称が含意している通り、パラレライザ230は、発散している光線またはビームレットを有する入射走査ペンシルビームを、平行な光線またはビームレット212aへと偏向させる。これにより、ワークピース222における注入パラメータ(例:注入角度)が均一となる。この例において示されている実施形態では、パラレライザ230は、2つの双極子(ダイポール)マグネット230a,230bを含んでいる。当該双極子は、ほぼ台形であり、かつ、互いに鏡像を描くように配向されている。これにより、ビーム212を、ほぼ「s字状(s-shaped)」に屈曲させることができる。好ましい実施形態では、双極子は、同等の角度および反対の屈曲方向を有している。
The
双極子の主な目的は、走査頂点246から生じる複数の発散している光線またはビームレットを、比較的薄い細長いリボン形状のビームの形態を有する複数のほぼ平行な光線またはビームレットへと変換することにある。本明細書に示されている通り、2つの対称な双極子を使用することにより、ビームレット経路長ならびに1次およびより高次の集束特性に関して、リボン形状ビームについての対称な特性がもたらされる。さらに、質量分析器226の動作と同様に、s字状の屈曲部は、イオンビーム212をフィルタリングし、かつ、当該イオンビームを汚染除去する役割を果たす。特に、質量分析器226の下流のイオンビーム212に入る中性粒子および/または他の汚染物質(例:環境粒子)の軌道は、双極子によってほぼ影響を受けない(あるいは、ごくわずかな影響しか受けない)。このため、これらの粒子は、元のビーム経路に沿って移動し続ける。その結果、屈曲しない(あるいは、ごくわずかにしか屈曲しない)比較的大量のこれらの中性粒子は、ワークピース222に衝突しない(例えば、ワークピースは屈曲したイオンビーム212を受けるように配置されている)。このような汚染物質は不適切な電荷および/またはエネルギーなどを有している場合があるので、イオンビーム212から当該汚染物質を除去することが重要であることが理解されるであろう。当該汚染物質は、システム200の減速ステージおよび/または他のステージによってほぼ影響を受けない(あるいは、ごくわずかな程度の影響しか受けない)。したがって、当該汚染物質は、ドーズ、エネルギー、および角度の均一性の観点において、ワークピース222に対して著しい影響(意図されていないが、一般的には望ましくない影響)を有する場合がある。このことは、次いで、予期せずかつ望ましくない結果としてもたらされるデバイス性能を生じさせる場合がある。
The main purpose of the dipole is to transform the multiple diverging rays or beamlets originating from the
並列化コンポーネント230の下流には、1つ以上の減速ステージ232が設けられている。減速システムおよび/または加速システムの例は、複数の米国特許、例えばDykstraらの5,091,655、Huangの6,441,382、およびFarleyらの8,124,946に示されている。これらの文献の全体は、参照により本明細書に組み込まれる。上述の通り、システム200内のこの点(位置)まで、ビームブローアップの傾向を緩和するために、ビーム212は比較的高いエネルギーレベルにおいて輸送されることが一般的である。ビームブローアップの傾向は、例えば、分解開口236などにおいてビーム密度が上昇する場合に、特に高くなりうる。イオン引出アセンブリ214、走査要素238、および集束・ステアリング要素240と同様に、減速ステージ232は、ビーム212を減速させるように動作可能な1つ以上の電極232a,232bを含んでいる。
Downstream of the
2つの電極220aおよび220b、238aおよび238b、240aおよび240b、ならびに232aおよび232bがそれぞれ、例示的なイオン引出アセンブリ214、走査要素238、集束・ステアリング要素240、および減速ステージ232において示されている。Rathmellらの米国特許第6,777,696に示す通り、これらの要素214、238、240および232は、イオンを加速および/または減速させるために、ならびに、イオンビーム212を集束、屈曲、偏向、収束、発散、走査、平行化、および/または汚染除去するために、配置およびバイアスされた任意の適切な数の電極を有していてよいことが理解されるであろう。上記文献の全体は、参照により本明細書に組み込まれる。さらに、集束・ステアリング要素240は、イオンビームを集束させるために、静電偏向プレート(例:プレートの1つ以上のペア)、ならびに、アインツェルレンズ、四重極子、および/または、他の集束要素を備えていてよい。必須ではないが、複数の電圧の平均値が0となるように、ステアリング・集束要素240内の偏向板に複数の電圧を印加することが有利となりうる。この効果は、要素240の集束態様の歪みを緩和するために追加のアインツェルレンズを導入する必要性を回避できることにある。イオンビーム212を「ステアリング」することは、プレート240a,240bの寸法と、当該プレートに印加されるステアリング電圧と、の関数であることが理解されるであろう。とりわけ、ビーム方向は、ステアリング電圧およびプレートの長さに比例し、かつ、ビームエネルギーに反比例するからである。
Two
図4は、本開示の1つ以上の態様に係る例示的な加速/減速ステージ232を、電極列(電極カラム)250としてより詳細に示す。電極列250は、第1電極254および第2電極254と、中間電極プレート(中間的な電極プレート)256および258のペアと、を含んでいる。第1電極252と第2電極254とは互いにほぼ平行であり、第1開口260および第2開口262をそれぞれ画定している。ギャップ(間隙)264は、開口260,262と電極252,254との間に画定されている。第1電極252および第2電極254にほぼ垂直な軸266が、ギャップ264を通過し、かつ、第1開口260および第2開口262を通過するように、当該ギャップ264が配置されている。中間電極プレートは、上側中間ギャップ電極256と下側中間ギャップ電極258とを含んでいる。第1上側サブギャップエリア268は、第1電極252と上側中間ギャップ電極256との間において画定されている。第1下側サブギャップエリア270は、第1電極252と下側中間ギャップ電極258との間に画定されている。同様に、第2上側サブギャップエリア272は、第2電極254と上側中間ギャップ電極256との間に画定されている。第2下側サブギャップエリア274は、第2電極254と下側中間ギャップ電極258との間に画定されている。イオンビーム276は、ギャップ264を通過し、例えば約12°だけ軸266から偏向させられ、ギャップ264の下流の点278に集束させられる。本開示は、Jenらの共有の米国特許9,218,941の内容の全体を本明細書に参照によりさらに組み込んでいる。
4 illustrates an exemplary acceleration/
図示されている例では、例示的な減速/加速ステージ232を構成する電極列250の動作の説明を容易にするために、特定のバイアスが示されている。しかしながら、本開示の目的に関して、所望の結果(例:加速、減速、および/または偏向の程度)を実現するために、任意の適切な電気バイアスが複数の電極に印加されてよいことが理解されるであろう。実際に、連続的に制御される可変イオンビームエネルギーが所望の結果である本開示の文脈において、これらの電極に印加される電気バイアス信号の変動は、電極に印加される電圧または当該電極を通過する電流の変動を伴うか否かにかかわらず、重要であることが理解されるであろう。ただし、図4のバイアス値は、イオンビーム276の減速を例示するために有効である。
In the illustrated example, specific biases are shown to facilitate explanation of the operation of the
イオンビーム276は、より具体的には、当該イオンビームの内部に含まれる正イオンは、初期エネルギーレベル(図示されている例では6KeV)において、第1開口260を通過してギャップ264に入る。ビーム内のイオンを加速または減速させるために、第1電極252および第2電極254は、異なる様式でバイアスされる。これにより、第1電極252と第2電極254との間に電位差が存在しており、イオンが第1電極252と第2電極254との間のギャップ264を通過するときに、対応するエネルギーの増加または減少を当該イオンが受ける。図4に示されている例では、イオンビームの正イオンが、負の4KVバイアスを有する第1電極252から、ゼロ電位を有する(例:グランドに接続されている)第2電極254へと通過するとき、当該正イオンは4KeVのエネルギー降下を受ける。したがって、正の6KeVの元のイオンビームエネルギーは、イオンがギャップ264を通過し、4KeVのエネルギー降下を受けることに伴って、2KeVまで低減される。したがって、イオンビーム276がギャップ264から出て当該ギャップ264の下流の中性ゾーンに入ると、当該イオンビームは特定の結果として生じるエネルギーレベル(図示されている例では2KeV)を有することとなる。
The
このことは、イオンがギャップ264を通過するために採った経路にかかわらず、当てはまることが理解されるであろう。図示されている例では、第1電極252と下側中間ギャップ電極258との間の下側サブギャップ270に入るイオンが、第1電極252と上側中間ギャップ電極256との間の側サブギャップ268に入るイオンが加速されるレート(割合)よりも、大きいレートで加速される。この理由は、第1電極252と下側中間ギャップ電極258との間の電位差が、第1電極252と上側中間ギャップ電極256との間の電位差よりも大きいからである。例えば、下部サブギャップ270については負の2.5KV(負の4KVから負の6.5KVを減算した値)であり、上部サブギャップ268については負の0.5KV(負の4KVから負の4.5KVを減算した値)である。
It will be appreciated that this is true regardless of the path taken by the ions to pass through the
しかしながら、この加速度の差は、上側中間ギャップ電極256および下部中間ギャップ電極258と第2電極254との間の電位の対応する差によって相殺(オフセット)される。図示されている例では、第2電極254はゼロにバイアスされている(例えば、グランドに接続されている)。したがって、第1下側サブギャップ270から到来したイオンは、第1上限サブギャップ268から到来したイオンに比べて大きく減速させられる。このことは、イオンがギャップに入るときのイオンの加速度の差を相殺する。これにより、イオンがギャップを出るときに、当該イオンの全てがほぼ同じエネルギー(例:2KeV)を有しうる。第1下側サブギャップ270から到来したイオンは、第2下側サブギャップ274を横断しながら、負の6.5KV(例:下側中間ギャップ電極258の負の6.5KVバイアスから第2電極254の0Vバイアスを減算した値)を横断しなければならないので、より大きい程度まで減速させられる。対照的に、第1上側サブギャップ268から到来したイオンは、第2上側サブギャップ272を横断しながら、負の4.5KV(例:上側中間ギャップ電極614の負の4.5KVバイアスから第2電極254の0Vバイアスを減算した値)を単に横断する必要があるため、より小さい程度まで減速させられる。したがって、ギャップの効果から、イオンが採る異なる経路およびイオンが通過するエネルギーレベルにかかわらず、ほぼ全てのイオンがほぼ同じエネルギーレベル(例:2KeV)で出現する。
However, this difference in acceleration is offset by the corresponding difference in potential between the upper and lower
上側中間ギャップ電極256および下側中間ギャップ電極258は、イオンビームをギャップ264内に引き寄せて、(i)当該イオンビームを加速または減速させ、かつ、(ii)ビームフィルタリングのためのビームの偏向または屈曲を生じさせる、という2つの目的を果たすことが理解されるであろう。例えば、中間ギャッププレート256,258は、互いに対して概ね差動バイアスされる。これにより、電極のバイアスの大きさおよびイオンビームのエネルギーに応じて、上方または下方に、もしくは様々な大きさで、当該ビームを屈曲または偏向させるように、中間ギャッププレート256,258の間に静電界を発生させることができる。例示的な構成では、上部中間ギャップ電極256および下部中間ギャップ電極258はそれぞれ、負の4.5KVおよび負の6.5KVにバイアスされる。ビームが正帯電イオンを含んでいると仮定した場合、この電位差に起因して、ギャップ264を通過する正帯電したイオンは、より負に帯電した下側中間ギャップ電極258に向かうように下側へと押しやられる。当該電位差は、最終的には、ビーム276を下側に(例:約12°だけ)屈曲または偏向させる。このようにイオンを屈曲または偏向させることは、イオンビームが通過する電界からの影響を受けない中性粒子を、当該ビームからフィルタリングする効果を有する。このようにイオンを屈曲または偏向させることは、注入されるべきイオンと実質的に同等のエネルギーを有していない可能性があるイオンをフィルタリングする効果も有する。
It will be appreciated that the upper and lower
変化するエネルギービームを考慮してこの例示的な12°の偏向を維持するために、中間ギャップ電極256,258に印加されるバイアスも、対応する方法によって変化させなければならないことが理解されるであろう。例えば、電極282,284を負の4KVにバイアスし、電極252,254を正の40KVにバイアスすることによって、イオンビームの加速を生じさせることができるが、任意の(複数の)バイアス値が考慮されてよい。このバイアス構成は、中性ゾーン内に延在する負電位バリア(障壁)を生じさせる。これらのバイアス電圧の印加を伴うデバイスの動作は、ビーム276が減速させられるのではなく加速させられることを除いては、記載されている動作と実質的に同様であることが理解されるであろう。これらの例示的な値は、ビームのエネルギーレベルを、例えば80KeVから120KeVへと増加させ、ビームを1.5倍だけ加速させるよう作用する。ビーム276内の正イオンは、当該イオンが第2上側サブギャップエリア272および第2下側サブギャップエリア274を横断することに伴って加速させられる。
It will be appreciated that to maintain this exemplary 12° deflection in light of the varying energy beam, the bias applied to the
上側中間ギャップ電極256および下側中間ギャップ電極258の配置、構成、および/または形状は、ビームに対するレンズ化、集束、偏向、および/または、加速/減速の効果の制御を容易にするように調整されてよいことが理解されるであろう。図4の例では、下側中間ギャップ電極258は、上側中間ギャップ電極256の幅に対してわずかに小さい幅を有しており、わずかに傾斜したコーナ280をも有している。これらの配置は、下側中間ギャップ電極258付近のイオンが受けるより強いレンズ効果に本質的に対抗している。当該イオンは、印加バイアスの差に起因して、より強い加速および/または減速を受けるからである。しかしながら、本開示の目的に関して、これらの電極256,258は、同等の形状を含む任意の適切な構成を有していてよいことが理解されるであろう。加速モード、減速モード、および/または、ドリフト(例:ゼロ加速/減速)モードにおいて、ビームは屈曲されられてもよいし屈曲されられなくてもよいし、あるいは、当該ビームは偏向させられてもよいし偏向させられなくてもよいことがさらに理解されるであろう。ビーム屈曲に主に関与する上側中間ギャップ電極256および下側中間ギャップ電極2258は、ビーム276の加速/減速に主に関与する第1電極252および第2電極254とは実質的に独立して動作するからである。例えば、上側中間ギャップ電極および下側中間ギャップ電極は、イオンビーム276を屈曲させることなく加速または減速を生じさせることができるよう、同一の電圧にバイアスされてよい。
It will be appreciated that the arrangement, configuration, and/or shape of the upper and lower
電位差の全ての全体的な正味の効果は、ビーム276内のイオンの集束、減速(または加速)、および任意選択の偏向である。イオンビームの偏向は、ビーム内の中性粒子としてのエネルギー汚染除去をもたらす。当該中性粒子は、電極の効果によって妨げられず、軸266に平行な元のビーム経路に沿って続く。次いで、汚染物質は例えば、何らかのタイプのバリアまたは吸収構造(不図示)に遭遇しうる。このことは、汚染物質の前進を停止させ、任意のワークピースを汚染物質から遮蔽する。対照的に、偏向イオンビーム276の軌道は、ビームをワークピース(不図示)の選択エリアに適切に遭遇させ、当該選択エリアをドープする。
The overall net effect of all of the potential differences is focusing, deceleration (or acceleration), and optional deflection of the ions in the
電極(例:第1電極252および第2電極254、上側中間ギャップ電極256および下側中間ギャップ電極258)の配置も、ビームブローアップを軽減する役割を果たすことが理解されるであろう。この配置は、ウェハに遭遇する前にビーム276が移動しなければならない距離を最小化するからである。ビーム276の屈曲ステージおよび集束ステージを直列的に配置することに替えて、当該ビームを(例:上側中間ギャップ電極256および下側中間ギャップ電極258によって)加速、減速、または偏向させることと同時に、当該ビームを(例:第1電極252および第2電極254によって)集束させることにより、エンドステーションをイオン注入システムの加速/減速ステージのより近くに配置できる。
It will be appreciated that the arrangement of the electrodes (e.g.,
図示されている(複数の)例では、図3の減速ステージ232の動作についてのより良好な理解を容易化するために、特定の電気バイアスが電極に印加されており、かつ、当該電気バイアスが示されている。しかしながら、本開示の目的に関して、必要に応じて、加速、減速、および/または偏向の程度などの所望の結果を実現するために、任意の適切な電圧または電流が複数の電極に印加されてよいことが理解されるであろう。加えて、本開示の目的に関して、マグネットおよび当該マグネットを通過する電流が、これらの所望の結果を実現するために利用されてよい。さらに、特定のバイアスは、本開示の選択的かつ可変のエネルギー制御を実現するために、選択的かつ連続的に可変かつ制御された様式によって印加される。しかしながら、図4に示すバイアス値は、イオンビーム276の減速を例示するために有効である。
In the illustrated example(s), a particular electrical bias is applied to the electrodes and is shown to facilitate a better understanding of the operation of the
バイアス電圧の選択的変化は、図3のワークピース222のオペレータおよび特性評価のうちの1つによって提供される1つ以上の所定の特性にさらに基づいていてよく、例えば反復可能であることに留意されたい。例えば、「チェーン注入(chain implant)」が実行されてよい。可変エネルギーを有する離散的な数の注入が、所定の連続的な順序によって、またはランダム化された様式によって、ワークピース222に提供される。例えば、チェーン注入における所定の連続な順序は、低エネルギーから開始し、当該低エネルギーから高エネルギーまでに至る特定の順序で、所定のエネルギーのセットを経るシーケンスであってよい。別の例では、チェーン注入における所定の連続な順序は、高エネルギーから開始し、当該高エネルギーから低エネルギーまでに至る特定の順序で、所定のエネルギーのセットを経るシーケンスであってもよい。さらに別の例では、チェーンイン注入は、任意の所与のエネルギーから開始し、任意の指定された順序またはランダム化された順序で、所定のエネルギーのセットを経るシーケンスであってもよい。それぞれの「チェーン」は、例えば、注入前のワークピース222の測定マップを用いて、予め決定されてよい。さらに、チェーンの各ステップは、注入チェーンの開始に先立ち、複数のシーケンシャルステップとしてイオン注入装置の制御システムにプログラムされてよい。
It should be noted that the selective change in bias voltage may further be based on one or more predetermined characteristics provided by one of the operators and characterizations of the
したがって、全体的な効果は、ワークピース222に対する、連続的に制御された均一または不均一な可変のドーピング深さプロファイルである。これにより、エネルギーパターン化された注入を定めることができる。例えば、異なるエネルギーのチェーン(連鎖)が反復的に実行されてよい。この場合、チェーンの各ステップにおいて提供されるワークピースに対するドーズおよびドーピング深さプロファイルは、実質的に均一な注入プロファイルをもたらす。あるいは、注入と同時に、および/または、1つのチェーンまたは複数のチェーン注入において、バイアス電圧を選択的に変化させるために、トポグラフィフィードバックが利用されてもよい。
The overall effect is thus a continuously controlled uniform or non-uniform variable doping depth profile for the
異なるタイプのエンドステーション206が、注入システム200において採用されうることが理解されるべきである。例えば、「バッチ」タイプのエンドステーションは、回転しているサポート構造体において、複数のワークピース222を同時に支持できる。この場合、ワークピース222は、全てのワークピースが完全に注入されるまで、イオンビームの経路を通るように回転させられる。一方、「シリアル」タイプのエンドステーションは、注入のために、ビーム経路に沿って単一のワークピース222を支持する。この場合、複数のワークピース222は、逐次的に(シリアルに)1つずつ注入される。各ワークピース222は、次のワークピース222の注入が開始する前に、完全に注入される。ハイブリッドシステムでは、ワークピース222全体にビーム212を供給するために、当該ワークピース222が第1方向(Y方向または低速走査方向)方向に機械的に移動させられる一方、当該ビームが第2方向(X方向または高速走査方向)に電気的または磁気的に走査させられてもよい。このことは、例えば、共に譲受された米国特許9,443,698に開示されている。当該文献の全体は、参照により本明細書に組み込まれている。対照的に、当技術分野において知られている、マサチューセッツ州ベバリーのアクセリステクノロジー社によって製造および販売されているOptima HD(商標)イオン注入システムによって例示される、いわゆる2次元機械的走査アーキテクチャでは、ワークピース222全体にビーム212を供給するために、固定位置イオンビームの正面においてワークピース222が第1(低速)走査方向に機械的に移動させられる一方、ほぼ直交する第2(高速)走査方向に当該ワークピースが同時に走査させられる場合がある。加えて、いわゆるリボンビームシステムでは、イオンビームがワークピースよりも大きい長さ寸法を有するように、当該イオンビームがビームラインに沿って輸送される場合がある。この場合、ワークピースの表面全体にイオンを注入するために、当該ワークピースのみがビームの長さ寸法を横断する方向に走査させられる。
It should be understood that different types of
図示されている例におけるエンドステーション206は、注入のために、ビーム経路に沿って単一のワークピース222を支持する、「シリアル」タイプのエンドステーションである。注入動作前のキャリブレーション測定(較正測定)のために、線量測定システム286が、ワークピース位置付近のエンドステーション206に含まれている。キャリブレーション時、ビーム212は線量測定システム286を通過する。線量測定システム286は、1つ以上のプロファイラ288を含んでいる。プロファイラ288は、プロファイラ経路290を連続的に横断することによって、走査ビームのプロファイルを測定してよい。例えば、プロファイラ288は、走査ビームの電流密度を測定するファラデーカップなどの電流密度センサを含んでいてよい。この場合、電流密度は、注入角度(例:ビームとワークピースの機械的表面との間の相対的配向、および/または、ビームとワークピースの結晶格子構造との間の相対的配向)の関数である。電流密度センサは、走査ビームに対してほぼ直交するように移動する。したがって、当該電流密度センサは、典型的にはリボンビームの幅を横断する。一例として、線量測定システムは、ビーム密度分布および角度分布の両方を測定する。文献に記載されている通り、ビーム角度の測定には、スロットを有するマスクの背後に存在する移動プロファイラ感知電流が使用されてよい。ショートドリフト後のスロット位置からの個別のビームレットのそれぞれの変位は、ビームレット角度を計算するために使用されてよい。この変位は、システムにおけるビーム診断の較正された基準と称されうることが理解されるであろう。
The
線量測定システム286は、制御システム292に動作可能に接続されている。当該線量測定システムは、当該制御システムからのコマンド信号を受信するとともに、当該制御システムに測定値を供給する。例えば、コンピュータ、マイクロプロセッサなどを含みうる制御システム292は、線量測定システム286から測定値を取得し、ワークピースにおける走査リボンビームの平均角度分布を計算するように動作可能であってよい。同様に、制御システム292は、イオンのビームが発生するターミナル202に動作可能に接続されているのみならず、ビームラインアセンブリ204の質量分析器226に、(例:電源242を介して)走査要素238に、(例:電源244を介して)集束・ステアリング要素240に、パラレライザ230に、および、加速/減速ステージ232に、動作可能に接続されている。したがって、線量測定システム286または任意の他のイオンビーム測定装置もしくは監視装置によって供給される値に基づいて、所望のイオン注入パラメータを容易にするために、これらの要素のいずれもが、制御システム292によって調整されてよい。典型的には、制御信号は、メモリモジュールに格納されているルックアップテーブルを用いて、実験を通じて収集された実験データに基づいて生成されてもよい。
The
一例として、イオンビームは、(例:制御システム292に格納/ロードされる)所定のビーム調整パラメータに従って最初に確立されうる。次いで、線量測定システム286からのフィードバックに基づいて、スキャナ238を調整して、走査ビームの走査速度を変更することにより、ワークピースにおけるイオンドーズを変化させることができる。同様に、例えば、イオン引出アセンブリ214および/または減速ステージ232内の電極に印加されるバイアスを調整して、加速/減速ステージ232および/またはイオン引出アセンブリを調整することによって、ビームのエネルギーレベルを変化させ、接合深さを調整できる。このことに応じて、例えば走査電極に印加されるバイアス電圧を調整することによって、スキャナ内に生じる磁界または(複数の)電界の強度および配向が調整されてもよい。例えば、ステアリング要素240または加速/減速ステージ232に印加される電圧を調整することによって、注入角度がさらに制御されてよい。
As an example, the ion beam may be initially established according to predetermined beam adjustment parameters (e.g., stored/loaded in the control system 292). Then, based on feedback from the
本発明の一態様では、制御システム292が提供されている。制御システム292は、ワークピース222における所定の走査パターンを確立するように構成されている。この場合、スキャンシステム228の制御によって、ワークピースがスポットイオンビームまたはペンシルビームに曝露される。例えば、制御システム292は、イオンビームのビーム密度および電流のみならず、イオンビームに関連する他の特性(具体的には、当該イオンビームのエネルギー)などの、イオンビームの様々な特性を制御するように構成されている。さらに、コントローラ292は、ワークピースサポート294上に配置されているワークピース222の走査速度を制御するように構成されている。図示されていないが、例えば、ワークピースサポート294は、移動機構(例:ロボット装置または他の装置)に動作可能に接続されている。当該移動機構は、ワークピースサポート上に存在しているワークピースサポート222を、イオンビーム212を通過させるように移動させるよう構成されている。
In one aspect of the present invention, a
さらに、イオン注入システム200において連続的に制御された可変エネルギーイオンビームを供給するための本開示の文脈において、制御システム292は、様々なサブシステムに印加される電気バイアス信号295を修正および調整するように構成されている。例えば、制御システム292は、1つ以上の波形298を1つ以上の可変電源299に供給する1つ以上の波形ジェネレータ296をさらに制御することによって、減速/加速ステージ232に供給される電気バイアス信号295を制御するように構成されている。この場合、イオン注入システム内のイオンビーム212のエネルギーは、本明細書において例示されている様々な電極に印加される1つ以上の波形に基づいている。
Further, in the context of the present disclosure for providing a continuously controlled variable energy ion beam in the
本明細書において説明されている例示的なイオン注入システム200に関して、制御システム292は、スキャナ228に印加される走査電圧を修正および変更するよう構成されていてよい。そして、このことに応じてイオンビームのエネルギーおよび偏向を調整するために、制御システム292は、波形に基づいて加速/減速ステージ232に印加されるバイアス電圧を、走査電圧に同期して修正および変更するようさらに構成されていてもよい。例えば、走査電圧およびバイアス電圧に対する上記変更は、離散的なステップにおいて実行されてもよいし、あるいは、プラテンまたは処理環境からワークピースを取り外すことなく、(例えば、離散的ではない)連続的な方法によって実行されてもよい。これにより、既知のシステムおよび方法に勝る様々な利点をもたらすことができる。
For the exemplary
イオン注入時におけるイオン注入プロセスのより一層大きい変動性をもたらすために、本開示は本技術分野において知られている構成と組み合わせられてよいことも理解されるであろう。ウェハ表面における可変のエネルギーおよびドーズのイオン注入を実現するために、注入プロセスにおける連続的に可変なエネルギー制御を提供するための本開示の構成は、イオン注入プロセスの可変ドーズ制御を提供するための他の構成と組み合わせられてよい。 It will also be appreciated that the present disclosure may be combined with configurations known in the art to provide even greater variability in the ion implantation process during ion implantation. Configurations of the present disclosure for providing continuously variable energy control of the implantation process may be combined with other configurations for providing variable dose control of the ion implantation process to achieve variable energy and dose ion implantation at the wafer surface.
同様に、ビームの所与の運動エネルギーにおいてビーム電流を変化させるために、異なる電荷状態のイオンを供給することが望ましい場合がある。ワークピースの表面における可変エネルギーおよび/または可変ドーズイオン注入を実現するために、注入プロセスの連続的な可変エネルギー制御を提供するための本開示は、イオン注入プロセスの可変電荷状態をもたらすための構成と組み合わせられてよい。同様に、特定の所望の結果を実現するために、周囲温度より低い温度において、あるいは周囲温度より高い温度において、ワークピースを供給することが望ましい場合がある。そこで、ウェハ表面における可変エネルギーイオン注入を実現するために、注入プロセスの連続的な可変エネルギー制御を提供するための本開示は、イオン注入プロセスにおいて低温または高温のワークピースを供給するための構成と組み合わせられてよい。 Similarly, it may be desirable to provide ions of different charge states to vary the beam current at a given kinetic energy of the beam. The present disclosure for providing continuous variable energy control of an implantation process may be combined with configurations for providing variable charge states of an ion implantation process to achieve variable energy and/or variable dose ion implantation at the surface of a workpiece. Similarly, it may be desirable to provide a workpiece at a temperature below ambient or above ambient to achieve a particular desired result. Thus, the present disclosure for providing continuous variable energy control of an implantation process may be combined with configurations for providing a cold or hot workpiece in an ion implantation process to achieve variable energy ion implantation at a wafer surface.
図5に示す通り、本開示によれば、本明細書において説明されているシステムは、様々な深さによってイオンを注入するための方法300を実現する。例示的な方法は、本明細書では一連のアクト(行為)またはイベント(事象)として図示および説明されているが、本開示は図示されているアクトまたはイベントの順序によって限定されず、一部のステップは、本開示に従って本明細書で図示および説明されているステップとは異なる順序で実行されてもよいし、および/または、他のステップと同時に実行されてもよいことを留意すべきである。さらに、本開示に係る方法を実現するために、図示されている全てのステップを要するわけではない。さらに、上記方法は、本明細書において図示および説明されているシステムに関連して実行されてもよいし、あるいは、本明細書では説明されていない他のシステムに関連して実行されてもよいことが理解できるであろう。
As shown in FIG. 5, in accordance with the present disclosure, the system described herein implements a
図5の方法300は、ワークピースサポート上にワークピースを設けるアクト302から開始する。アクト304において、スポットイオンビームなどのイオンビームが供給される。そして、アクト306において、イオンビームが質量分析される。アクト308では、ワークピースおよびイオンビームのうちの1つ以上が、他方に対して走査させられてよい。例えば、アクト308において、ワークピースは、2つの直交する方向に機械的に走査(スキャン)させられる。別の例では、イオンビームは、第1方向に静電的または磁気的に走査させられるとともに、第2方向に機械的に走査させられる。さらに別の例では、イオンビームは、2つの非平行な方向に静電的に走査させられる。
The
アクト310において、イオンビームがワークピースを横断するように走査させられるので、当該イオンビームのエネルギーはアクト308における走査とともに所定の波形によって連続的な様式により選択的に変化する。したがって、ワークピースへのイオンの注入の結果として生じる深さは、ワークピースの表面に沿って変化する。
In
このように、本開示は、イオンビームがワークピースを横断するよう移動する場合に、またはその逆の場合に、当該イオンビームのエネルギーを変化させるためのイオン注入システムおよび方法を対象としている。本開示は、加速/減速電極に印加される電気バイアスを変化させることによって実現可能である。これにより、ワークピースに供給されるイオンのエネルギーを連続的に変化させることができる。その結果、加速/減速電極に供給される電気バイアス信号の所定のセットまたは上述の波形に基づいて、ワークピースにおける所定の可変エネルギーイオン注入深さを実現できる。好ましい実施形態では、本開示は、ワークピースにおいてマッピングされている、および/または、マトリクス内にマッピングされている連続関数に応じた、連続的に制御される可変エネルギーパターンを供給しうる。当該エネルギーパターンは、ワークピースにおける位置の関数としてビームのエネルギーをプログラムするために使用されてよい。例えば、本開示は、メモリ内に空間マップを作成することによって実行されてよい。この場合、メモリ位置の各セルは、ワークピース上のx位置およびy位置について一意なエネルギーに対応している。本開示は、連続的に可変なエネルギーの形態として、またはエネルギーのステップ関数変化の形態として、または他の形態として、可変のエネルギー注入をもたらすためのシステムに含まれうることが理解されるであろう。ワークピースの表面に対するエネルギープロファイルの変化は対称的であってもよく、かつ、象限において設定されていてもよいし(例:特定の位置Q1ではエネルギーX1、Q2ではエネルギーX2)、あるいは、他の様式において設定されていてもよい。 Thus, the present disclosure is directed to an ion implantation system and method for varying the energy of an ion beam as it moves across a workpiece or vice versa. This can be accomplished by varying the electrical bias applied to the acceleration/deceleration electrodes, which can continuously vary the energy of the ions delivered to the workpiece. As a result, a predetermined variable energy ion implantation depth can be achieved in the workpiece based on a predetermined set of electrical bias signals or waveforms provided to the acceleration/deceleration electrodes. In a preferred embodiment, the present disclosure can provide a continuously controlled variable energy pattern according to a continuous function that is mapped at the workpiece and/or mapped in a matrix. The energy pattern can be used to program the energy of the beam as a function of position at the workpiece. For example, the present disclosure can be implemented by creating a spatial map in a memory, where each cell of the memory location corresponds to a unique energy for an x and y location on the workpiece. It will be appreciated that the present disclosure can be included in a system for providing variable energy implantation as a form of continuously variable energy, or as a form of a step function change in energy, or other form. The variation of the energy profile across the surface of the workpiece may be symmetrical and may be set in quadrants (e.g., energy X1 at a particular location Q1, energy X2 at Q2 ), or may be set in other manners.
例示のために本明細書において説明されている例示的なイオン注入システムアーキテクチャは、図3のシステム200が走査スポットビームを導入しており、ビームがワークピースの表面を横断するよう電子的または磁気的に走査させられるという点において、ワークピースの表面におけるイオンビームエネルギーの連続的な変化を実現するために特に適している。スポットビームの上記走査は、ビームが走査される場合にイオンビームエネルギーを変調または変化させることを可能にする。ビームがウェハにおける選択された位置に衝突するよう走査させられた場合、当該ビームはビームラインにおける全ての光学要素(光学素子,光学部材)を通過する。このため、ビームのウェハへの衝突に先立ち、当該ビームのエネルギーを選択されたエネルギーへと変化させるよう、当該ビームが修正されうる。有利には、ビームエネルギーの変化がスキャナおよび/またはエンドステーションのxおよびyの走査機能と同期するように、実現されうる。この場合、走査ビームのエネルギーは、xおよびyの関数として変化しうる。有利には、本明細書において説明されている例示的なイオン注入システムでは、最終ビームエネルギーは、単一の下流コンポーネント(すなわち減速/加速ステージ232)に印加されるバイアス電圧によって変化させられてよい。この場合、イオンエネルギーを変化させることができるが、次いで、イオンビームの所望の完全性(統一性)および特性を維持するために、下流の他のコンポーネントのバイアスに影響を及ぼすことになる上流コンポーネント(例:イオン源208のすぐ下流に位置している引出電極214)内の電気バイアスを変更する場合に要求される、煩雑かつ複雑な調整要件を排除できる。加えて、加速/減速およびその偏向エネルギーフィルタ態様に印加されるバイアス電圧は、走査ビームのx位置およびy位置の関数として変化させられうる。この場合、イオンビームのエネルギーの変化とは無関係に、当該ビームがウェハに対する同一の経路上を移動するように制約されうる。
The exemplary ion implantation system architecture described herein for illustrative purposes is particularly suited to achieving a continuous change in ion beam energy at the surface of the workpiece in that the
複数のコンポーネントおよびサブシステムに対する選択的なバイアスの全ては、制御システム292を通じて実現されうることが理解されるであろう。そして、当該選択的なバイアスの全ては、走査システムから出力されるビームの位置に基づいて、加速/減速ステージおよびエネルギーフィルタへのフィードバックループ入力を用いて、実現されてもよいことが理解されるであろう。しかしながら、フィードバックループは、本開示の連続的に制御される可変エネルギーイオン注入機構を実現するための要件ではないことも理解されるであろう。予めプログラムされたイオンビームエネルギープロファイルは、本開示の選択的に可変なエネルギーイオン注入を実現するために有利に採用されうるからである。このように、イオンビームエネルギーは、ウェハ上のビームのx座標位置およびy座標位置に応じたフィードバックループを用いて、あるいは、何らかの所定の所望のパターンを用いて、ダイごとに、あるいは何らかの他の機構または領域ごとに選択的に変化させられてよい。
It will be appreciated that all of the selective biasing of the components and subsystems may be accomplished through the
本開示の連続的に制御された可変エネルギーイオン注入は、ワークピースのマップを利用して実現されてもよい。この場合、電極列および/またはエネルギーフィルタ内の1つ以上の電極にそれぞれ供給される1つ以上の電圧の連続的かつ制御された変化は、ワークピースサポート上に配置されているワークピースのマップに基づいている。あるいは、本開示のイオン注入システムには、ワークピースサポート上に配置されているワークピースの1つ以上を検出するように構成されている1つ以上の検出器(例:光学検出器、カメラなど)が設けられていてもよい。この場合、加速/減速ステージおよび/またはエネルギーフィルタの電極列のうちの1つ以上にそれぞれ供給される1つ以上の電圧の連続的な変化は、検出器からのフィードバックにさらに基づいている。この代替的な実施形態において、好ましくは、検出器は、ワークピースの厚さ、ワークピース上に位置している層の厚さ、ワークピース上のダイパターン、ワークピースのエッジ(縁)、ワークピースの中心、または、ワークピース上の所定の領域、のうちの1つ以上を検出するように構成されていてよい。この場合、検出された情報は、イオンビームのエネルギーを連続的に変化させるための入力として供給される。 The continuously controlled variable energy ion implantation of the present disclosure may be achieved using a map of the workpiece. In this case, the continuous and controlled variation of the one or more voltages respectively supplied to one or more electrodes in the electrode array and/or energy filter is based on a map of the workpiece disposed on the workpiece support. Alternatively, the ion implantation system of the present disclosure may be provided with one or more detectors (e.g., optical detectors, cameras, etc.) configured to detect one or more of the workpieces disposed on the workpiece support. In this case, the continuous variation of the one or more voltages respectively supplied to one or more of the electrode arrays of the acceleration/deceleration stage and/or energy filter is further based on feedback from the detector. In this alternative embodiment, the detector may preferably be configured to detect one or more of the thickness of the workpiece, the thickness of a layer located on the workpiece, a die pattern on the workpiece, an edge of the workpiece, a center of the workpiece, or a predetermined area on the workpiece. In this case, the detected information is provided as an input for continuously varying the energy of the ion beam.
本発明は1つ以上の実施形態に関して図示および説明されているが、添付のクレームの趣旨および範囲から逸脱することなく、図示されていり例に対して変更および/または改変が行われてよいことが理解されるであろう。特に、上述のコンポーネントまたは構造(ブロック、ユニット、エンジン、アセンブリ、デバイス、回路、システムなど)によって実行される様々な機能に関して、当該コンポーネントを説明するために使用されている用語(「手段」(means)への任意の参照を含む)は、別段の定めがない限り、本明細書において例示されている本発明の例示的な実施形態において機能を実行する、開示されている構造と構造的に等価ではないが、説明されているコンポーネントの指定された機能を実行する(すなわち、機能的に等価である)任意のコンポーネントまたは構造に対応することが意図されている。加えて、本発明の特定の構成は複数の実施形態のうちの1つのみに関して開示されている場合があるが、当該構成は任意の所与のまたは特定の用途に対して所望され、かつ有利でありうるように、他の実施形態の1つ以上の他の構成と組み合わせ可能である。さらに、「含んでいる(including)」、「含む(includes)」、「有している(having)」、「有する(has)」、「伴う(with)」というターム(用語)、または、これらのタームの変形語が詳細な説明およびクレームのいずれかにおいて使用されている限りにおいて、これらのタームは、「備えている(comprising)」というタームと同じく、包括的であることが意図されている。 While the present invention has been illustrated and described with respect to one or more embodiments, it will be understood that changes and/or modifications may be made to the illustrated examples without departing from the spirit and scope of the appended claims. In particular, with respect to the various functions performed by the above-described components or structures (blocks, units, engines, assemblies, devices, circuits, systems, etc.), the terms used to describe such components (including any reference to "means") are intended to correspond to any component or structure that performs the specified function of the described component (i.e., is functionally equivalent) but is not structurally equivalent to the disclosed structure that performs the function in the exemplary embodiment of the invention illustrated herein, unless otherwise specified. In addition, although a particular configuration of the present invention may be disclosed with respect to only one of multiple embodiments, such configuration can be combined with one or more other configurations of other embodiments as may be desired and advantageous for any given or specific application. Additionally, to the extent the terms "including," "includes," "having," "has," "with," or variations of these terms are used in any of the detailed description and claims, these terms are intended to be as inclusive as the term "comprising."
Claims (63)
ドーパント材料をイオン化し、イオンビームを発生させるイオン源と、
前記イオン源の下流に配置されており、前記イオンビームをワークピースに向けて輸送するビームラインアセンブリと、
イオンビームおよびワークピースのうちの1つ以上を、第1走査軸に沿って互いに対して走査する走査装置と、
前記イオンビームの輸送時に前記イオンビームを受け入れる加速/減速ステージと、
前記加速/減速ステージの下流に配置されているエンドステーションと、
前記加速/減速ステージに動作可能に接続されており、1つ以上の電気バイアス信号を前記加速/減速ステージに供給する1つ以上の電源と、
コントローラと、を備えており、
前記エンドステーションは、前記イオンビームの経路内に前記ワークピースを選択的に配置するワークピースサポートを備えており、
前記加速/減速ステージは、1つ以上の前記電気バイアス信号に基づいて、前記イオンビームの複数のエネルギーを定め、
前記第1走査軸に沿った前記イオンビームおよび前記ワークピースのうちの1つ以上の走査とともに、前記コントローラが、前記加速/減速ステージに供給される1つ以上の前記電気バイアス信号を選択的に変化させ、
1つ以上の前記電気バイアス信号の選択的変化は、前記ワークピースに対する前記イオンビームの位置と、前記ワークピースに対する所定の注入プロファイルと、に少なくとも部分的に基づいている、イオン注入システム。 1. An ion implantation system comprising:
an ion source for ionizing a dopant material to generate an ion beam;
a beamline assembly disposed downstream of the ion source for transporting the ion beam toward a workpiece;
a scanning device for scanning one or more of the ion beam and the workpiece relative to one another along a first scan axis;
an acceleration/deceleration stage for receiving the ion beam during transport of the ion beam;
an end station disposed downstream of the acceleration/deceleration stage;
one or more power sources operatively connected to the acceleration/deceleration stage to provide one or more electrical bias signals to the acceleration/deceleration stage;
A controller,
the end station includes a workpiece support for selectively positioning the workpiece within a path of the ion beam;
the acceleration/deceleration stage defines a plurality of energies of the ion beam based on one or more of the electrical bias signals;
the controller selectively varies one or more of the electrical bias signals supplied to the acceleration/deceleration stage in conjunction with scanning one or more of the ion beam and the workpiece along the first scan axis;
An ion implantation system, wherein selectively varying one or more of the electrical bias signals is based at least in part on a position of the ion beam relative to the workpiece and a predetermined implantation profile for the workpiece.
所定の前記注入プロファイルは、前記波形によって概ね定められる、請求項1に記載のイオン注入システム。 the selective variation of one or more of the electrical biasing signals is further based at least in part on a waveform applied to one or more of the electrical biasing signals;
The ion implantation system of claim 1 , wherein the predetermined implantation profile is substantially defined by the waveform.
前記第1走査軸に沿った前記イオンビームおよび前記ワークピースのうちの1つ以上の走査とともに、前記波形ジェネレータが、前記加速/減速ステージに供給される1つ以上の前記電気バイアス信号を連続的に変化させる、請求項3に記載のイオン注入システム。 the waveform generator is operatively connected to the controller;
4. The ion implantation system of claim 3, wherein the waveform generator continuously varies the one or more electrical bias signals supplied to the acceleration/deceleration stage along the scanning of one or more of the ion beam and the workpiece along the first scan axis.
前記コントローラは、前記第1走査周波数よりも大きいバイアス変化周波数において、1つ以上の前記電気バイアス信号を選択的に変化させる、請求項1に記載のイオン注入システム。 the scanning device scans one or more of the ion beam and the workpiece back and forth relative to one another along the first scan axis at a first scan frequency;
The ion implantation system of claim 1 , wherein the controller selectively varies one or more of the electrical bias signals at a bias variation frequency that is greater than the first scan frequency.
1つ以上の前記電気バイアス信号は、電圧および電流のうちの1つ以上を含んでいる、請求項1に記載のイオン注入システム。 the one or more power sources include one or more selectively variable power sources;
The ion implantation system of claim 1 , wherein the one or more electrical bias signals include one or more of a voltage and a current.
1つ以上の前記電気バイアス信号は、前記電極列の1つ以上の前記電極ペアに供給される、請求項1に記載のイオン注入システム。 the acceleration/deceleration stage includes an electrode array having one or more electrode pairs;
The ion implantation system of claim 1 , wherein one or more of the electrical bias signals are provided to one or more of the electrode pairs in the electrode array.
1つ以上の前記電気バイアス信号の前記選択的変化は、前記検出器からのフィードバックにさらに基づいている、請求項1に記載のイオン注入システム。 a detector for detecting one or more workpiece attributes associated with the workpiece disposed on the workpiece support;
The ion implantation system of claim 1 , wherein the selective variation of one or more of the electrical bias signals is further based on feedback from the detector.
1つ以上の前記ワークピース属性は、前記ワークピースの厚さ、前記ワークピース上に位置している層の厚さ、前記ワークピース上のダイパターン、前記ワークピースのエッジ、前記ワークピースの中心、および、前記ワークピース上の所定の領域、のうちの1つ以上を含んでいる、請求項22に記載のイオン注入システム。 the detector comprises an optical detector;
23. The ion implantation system of claim 22, wherein the one or more workpiece attributes include one or more of a thickness of the workpiece, a thickness of a layer located on the workpiece, a die pattern on the workpiece, an edge of the workpiece, a center of the workpiece, and a predetermined area on the workpiece.
1つ以上の前記電源のうちの少なくとも1つは、少なくとも1つの前記屈曲電極にさらに動作可能に接続されており、かつ、1つ以上の前記電気バイアス信号のうちの少なくとも1つを当該屈曲電極に供給し、
少なくとも1つの前記屈曲電極は、前記加速/減速ステージに供給される1つ以上の前記電気バイアス信号の作用として前記イオンビームを偏向させる、請求項1に記載のイオン注入システム。 further comprising an energy filter having at least one bent electrode;
At least one of the one or more power sources is further operably connected to at least one of the flexion electrodes and provides at least one of the one or more electrical bias signals to the flexion electrodes;
The ion implantation system of claim 1 , wherein at least one of the bending electrodes deflects the ion beam as a function of one or more of the electrical bias signals supplied to the acceleration/deceleration stage.
イオンビームをワークピースに向けて導くことと、
前記イオンビームおよび前記ワークピースのうちの1つ以上を互いに対して走査することによって、前記ワークピースにイオンを注入することと、
前記ワークピースに対する前記イオンビームの位置と、前記ワークピースに対する所定の注入プロファイルと、に少なくとも部分的に基づいて、前記イオンビームおよび前記ワークピースのうちの1つ以上の走査とともに、前記イオンビームのエネルギーを選択的に変化させることと、を含んでおり、
前記ワークピースへのイオンの注入の結果として生じる深さが、走査とともに変化する、方法。 1. A method for ion implantation comprising the steps of:
directing an ion beam toward a workpiece;
implanting ions into the workpiece by scanning one or more of the ion beam and the workpiece relative to one another;
selectively varying an energy of the ion beam along with scanning one or more of the ion beam and the workpiece based at least in part on a position of the ion beam relative to the workpiece and a predetermined implant profile for the workpiece;
A method wherein the resulting depth of implantation of ions into the workpiece varies with scanning.
前記屈曲電極は、前記イオンビームを角度的に偏向させ、
前記屈曲電極に対する前記電気バイアスの変化は、前記イオンビーム加速器電極または前記イオンビーム減速器電極に対する前記電気バイアスの変化と同期している、請求項30に記載の方法。 Selectively varying the energy of the ion beam further comprises varying the electrical bias on the bent electrodes;
the bent electrodes angularly deflect the ion beam;
31. The method of claim 30, wherein the change in electrical bias on the bend electrodes is synchronized with the change in electrical bias on the ion beam accelerator electrodes or the ion beam decelerator electrodes.
イオンビームを発生させるイオン源と、
イオンビームを受け入れて、当該イオンビームに関連する最終エネルギーを有する最終イオンビームを発生させる加速/減速ステージと、
前記最終イオンビームの経路に沿ってワークピースを選択的に配置するワークピースサポートと、
第1走査軸および第2走査軸に沿って、前記イオンビームおよび前記ワークピースサポートのうちの1つ以上を互いに対して走査する走査装置と、
前記加速/減速ステージに動作可能に接続されており、前記加速/減速ステージに1つ以上の電気バイアス信号を供給する1つ以上の電源と、
1つ以上の前記電源のうちの1つ以上に動作可能に接続されており、1つ以上の前記電気バイアス信号に波形を制御可能に印加する波形ジェネレータと、
1つ以上の前記電源および前記波形ジェネレータに動作可能に接続されているコントローラと、を備えており、
前記ワークピースに前記イオンビームの複数のエネルギーを所定の様式によって注入するために、前記イオンビームおよび前記ワークピースのうちの1つ以上の走査とともに、前記コントローラが、前記加速/減速ステージに供給される1つ以上の前記電気バイアス信号を選択的に変化させ、
前記加速/減速ステージに供給される1つ以上の前記電気バイアス信号の選択的変化は、前記波形と、前記ワークピースに対する前記イオンビームの位置と、前記ワークピースに注入されるイオンの所定のエネルギーと、に少なくとも部分的に基づいている、イオン注入システム。 1. An ion implantation system comprising:
an ion source that generates an ion beam;
an acceleration/deceleration stage that receives the ion beam and generates a final ion beam having a final energy associated with the ion beam;
a workpiece support for selectively positioning a workpiece along a path of the final ion beam;
a scanning device for scanning one or more of the ion beam and the workpiece support relative to one another along a first scan axis and a second scan axis;
one or more power sources operatively connected to the acceleration/deceleration stage to provide one or more electrical bias signals to the acceleration/deceleration stage;
a waveform generator operatively connected to one or more of the one or more power sources to controllably apply a waveform to one or more of the electrical bias signals;
a controller operatively connected to one or more of the power sources and the waveform generator;
the controller selectively varies one or more of the electrical bias signals supplied to the acceleration/deceleration stage in conjunction with scanning one or more of the ion beam and the workpiece to implant multiple energies of the ion beam into the workpiece in a predetermined manner;
and selectively varying one or more of the electrical bias signals supplied to the acceleration/deceleration stage is based at least in part on the waveform, a position of the ion beam relative to the workpiece, and a predetermined energy of ions implanted into the workpiece.
前記走査装置は、第2周波数において前記第2走査軸に沿って前記ワークピースを走査し、
前記第1周波数は、前記第2周波数に比べて少なくとも1桁大きい、請求項35に記載のイオン注入システム。 the scanning device scans the ion beam along the first scan axis at a first frequency;
the scanning device scans the workpiece along the second scan axis at a second frequency;
36. The ion implantation system of claim 35, wherein the first frequency is at least an order of magnitude greater than the second frequency.
前記第3周波数は、前記第1周波数に比べて少なくとも1桁大きい、請求項37に記載のイオン注入システム。 the selectively varying one or more of the electrical bias signals provided to the acceleration/deceleration stage selectively varying at a third frequency;
38. The ion implantation system of claim 37, wherein the third frequency is at least an order of magnitude greater than the first frequency.
イオンビームを形成し、前記イオンビームをワークピースに向けて導くイオン源と、
ビーム経路に沿って前記イオンビームを輸送する1つ以上のビームラインコンポーネントと、
第1走査軸に沿って前記イオンビームおよび前記ワークピースのうちの1つ以上を選択的かつ反復走査するスキャナ装置と、
前記スキャナ装置の下流に位置している加速/減速ステージと、
前記加速/減速ステージに電気バイアス信号を供給する電源と、
前記イオンビームおよび前記ワークピースのうちの1つ以上が前記第1走査軸に沿って反復走査させられているときに、前記電源から前記加速/減速ステージに供給される前記電気バイアス信号を変化させることによって、前記第1走査軸に沿って前記ワークピースに注入されるイオンの最終エネルギーを選択的に変化させるコントローラと、を備えている、イオン注入システム。 1. An ion implantation system comprising:
an ion source for forming an ion beam and directing the ion beam toward a workpiece;
one or more beamline components that transport the ion beam along a beam path;
a scanner device for selectively and repeatedly scanning one or more of the ion beam and the workpiece along a first scan axis;
an acceleration/deceleration stage located downstream of the scanner device;
a power supply for providing an electrical bias signal to the acceleration/deceleration stage;
and a controller that selectively varies the final energy of ions implanted into the workpiece along the first scan axis by varying the electrical bias signal provided from the power supply to the acceleration/deceleration stage as one or more of the ion beam and the workpiece are repeatedly scanned along the first scan axis.
第1周波数において前記第1走査軸に沿って前記イオンビームを反復的に横断させ、
第2周波数において前記第2走査軸に沿って前記ワークピースを横断させ、
前記第1周波数は、前記第2周波数に比べて少なくとも1桁大きい、請求項43に記載のイオン注入システム。 The scanner device includes:
repeatedly traversing the ion beam along the first scan axis at a first frequency;
traversing the workpiece along the second scan axis at a second frequency;
44. The ion implantation system of claim 43, wherein the first frequency is at least an order of magnitude greater than the second frequency.
前記第3周波数は、前記第1周波数よりも大きい、請求項44に記載のイオン注入システム。 the electrical bias signal supplied to the acceleration/deceleration stage is varied at a third frequency;
45. The ion implantation system of claim 44, wherein said third frequency is greater than said first frequency.
所定の波形に対応する電気バイアス信号を供給する電源と、
前記電気バイアス信号を受信して、所定の前記波形に基づいてイオンビームを最終エネルギーに至るように選択的に変化させるエネルギー変化コンポーネントと、を備えており、
前記最終エネルギーは、選択的に可変である、イオン注入システム。 1. An ion implantation system comprising:
a power supply for providing an electrical bias signal corresponding to a predetermined waveform;
an energy variation component that receives the electrical bias signal and selectively varies the ion beam to a final energy based on a predetermined waveform;
An ion implantation system wherein the final energy is selectively variable.
前記イオンビームが前記第1走査軸に沿って走査させられることとともに、所定の前記波形に対応する前記電気バイアス信号が、前記エネルギー変化コンポーネントに供給される、請求項49に記載のイオン注入システム。 an ion beam scanner for scanning the ion beam along a first scan axis;
50. The ion implantation system of claim 49, wherein the electrical bias signal corresponding to a predetermined waveform is supplied to the energy varying component while the ion beam is scanned along the first scan axis.
前記第1走査軸に沿った前記イオンビームの走査の周波数は、前記第2走査軸に沿った前記ワークピースの走査の周波数よりも大きい、請求項51に記載のイオン注入システム。 a workpiece scanner for selectively scanning a workpiece relative to the ion beam along a second scan axis;
52. The ion implantation system of claim 51, wherein a frequency of scanning of the ion beam along the first scan axis is greater than a frequency of scanning of the workpiece along the second scan axis.
前記屈曲電極は、前記加速/減速ステージに供給される所定の前記波形に対応する前記電気バイアス信号に基づいて、前記イオンビームの経路を変化させる、請求項52に記載のイオン注入システム。 the energy changing component includes an acceleration/deceleration stage and a bending electrode;
53. The ion implantation system of claim 52, wherein the bending electrode changes a path of the ion beam based on the electrical bias signal corresponding to a predetermined waveform supplied to the acceleration/deceleration stage.
少なくとも前記加速/減速ステージは、イオン注入のための複数の前記調整レシピに対応している、請求項54に記載のイオン注入システムであって。 a controller configured with a plurality of tuning recipes for modifying a plurality of properties of the ion beam;
55. The ion implantation system of claim 54, wherein at least the acceleration/deceleration stages correspond to a plurality of the adjustment recipes for ion implantation.
所定の前記波形に対応する前記電気バイアス信号は、前記走査機構と同期している、請求項49に記載のイオン注入システム。 a scanning mechanism for scanning the ion beam along a first axis;
50. The ion implantation system of claim 49, wherein said electrical bias signal corresponding to said predetermined waveform is synchronized with said scanning mechanism.
第1所定エネルギーにおいてイオンビームを注入するためにイオン注入パラメータを設定することと、
前記第1所定エネルギーに関連する第1最小イオンビーム角度を決定することと、
前記第1所定エネルギーに関連する前記第1最小イオンビーム角度の決定に基づいて、単一の前記ワークピースに対するイオンビーム配向角度を決定することと、
第2所定エネルギーにおいてイオンビームを注入するために、前記イオン注入パラメータを調整することと、
前記第2所定エネルギーに関連する第2最小イオンビーム角度を決定することと、
前記第2所定エネルギーに関連する前記第2最小イオンビーム角度の決定に基づいて、単一の前記ワークピースに対する前記イオンビーム配向角度を制御することと、
各シーケンシャル注入ステップにおいて単一の前記ワークピースに対する前記イオンビーム配向角度を調整しつつ、複数のシーケンシャル注入ステップにおいて前記第1所定エネルギーおよび前記第2所定エネルギーにおいてイオンを注入するように、単一の前記ワークピースを処理することと、を含んでいる、方法。 1. A method for implanting ions into a single workpiece using a single tailored recipe in multiple sequential implantation steps at different predetermined energies, comprising:
setting ion implantation parameters to implant the ion beam at a first predetermined energy;
determining a first minimum ion beam angle associated with the first predetermined energy;
determining an ion beam orientation angle for a single said workpiece based on the determination of the first minimum ion beam angle associated with the first predetermined energy;
adjusting the ion implantation parameters to implant the ion beam at a second predetermined energy;
determining a second minimum ion beam angle associated with the second predetermined energy;
controlling the ion beam orientation angle for a single said workpiece based on the determination of the second minimum ion beam angle associated with the second predetermined energy;
and processing a single workpiece to implant ions at the first and second predetermined energies in multiple sequential implantation steps while adjusting the ion beam orientation angle relative to the single workpiece in each sequential implantation step.
第1所定エネルギーにおいてイオンビームを注入するために、1つ以上のイオン注入パラメータを設定することと、
第2所定エネルギーにおいてイオンビームを注入するために、1つ以上の前記イオン注入パラメータを設定することと、
前記第1所定エネルギーおよび前記第2所定エネルギーにおいて、単一の前記ワークピースにイオンビームをシーケンシャル注入することと、を含んでいる、方法。 1. A method for implanting ions into a single workpiece using a single tailored recipe in multiple sequential implantation steps at different predetermined energies, comprising:
setting one or more ion implantation parameters to implant the ion beam at a first predetermined energy;
setting one or more of the ion implantation parameters to implant the ion beam at a second predetermined energy;
and sequentially implanting an ion beam into a single said workpiece at said first predetermined energy and said second predetermined energy.
第1所定エネルギーにおいてイオンビームを注入するために、1つ以上のイオン注入パラメータを設定することと、
前記第1所定エネルギーに関連する最小イオンビーム角度を決定することと、
前記第1所定エネルギーに関連する前記最小イオンビーム角度の決定に基づいて、単一の前記ワークピースに対する第1イオンビーム配向角度を決定することと、
第2所定エネルギーにおいて前記イオンビームを注入するために、1つ以上の前記イオン注入パラメータを制御することと、
第2所定エネルギーに関連する第2最小イオンビーム角度を決定することと、
前記第2所定エネルギーに関連する前記第2最小イオンビーム角度の決定に基づいて、単一の前記ワークピースに対する第2イオンビーム配向角度を決定することと、
前記イオンビームに対するそれぞれの第1イオンビーム配向および第2イオンビーム配向をともに制御しつつ、前記第1所定エネルギーおよび前記第2所定エネルギーにおいて単一の前記ワークピースにイオンビームをシーケンシャル注入することと、を含んでいる、方法。 1. A method for implanting ions into a single workpiece using a single tailored recipe in multiple sequential implantation steps at different predetermined energies, comprising:
setting one or more ion implantation parameters to implant the ion beam at a first predetermined energy;
determining a minimum ion beam angle associated with the first predetermined energy;
determining a first ion beam orientation angle for a single said workpiece based on the determination of the minimum ion beam angle associated with the first predetermined energy;
controlling one or more of the ion implantation parameters to implant the ion beam at a second predetermined energy;
determining a second minimum ion beam angle associated with a second predetermined energy;
determining a second ion beam orientation angle for the single workpiece based on the determination of the second minimum ion beam angle associated with the second predetermined energy;
and sequentially implanting ion beams into a single said workpiece at said first predetermined energy and said second predetermined energy while controlling both respective first and second ion beam orientations for said ion beam.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202163229663P | 2021-08-05 | 2021-08-05 | |
| US202163229751P | 2021-08-05 | 2021-08-05 | |
| US63/229,663 | 2021-08-05 | ||
| US63/229,751 | 2021-08-05 | ||
| PCT/US2022/039434 WO2023014889A1 (en) | 2021-08-05 | 2022-08-04 | Blended energy ion implantation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2024529935A true JP2024529935A (en) | 2024-08-14 |
Family
ID=92263695
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024503835A Pending JP2024529935A (en) | 2021-08-05 | 2022-08-04 | Mixed Energy Ion Implantation |
| JP2024503834A Pending JP2024529934A (en) | 2021-08-05 | 2022-08-05 | Method and apparatus for continuous chain energy ion implantation - Patents.com |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024503834A Pending JP2024529934A (en) | 2021-08-05 | 2022-08-05 | Method and apparatus for continuous chain energy ion implantation - Patents.com |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP2024529935A (en) |
-
2022
- 2022-08-04 JP JP2024503835A patent/JP2024529935A/en active Pending
- 2022-08-05 JP JP2024503834A patent/JP2024529934A/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024529934A (en) | 2024-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102429370B1 (en) | Ion implantation system and method with variable energy control | |
| US8124947B2 (en) | Ion implanter having combined hybrid and double mechanical scan architecture | |
| US7227160B1 (en) | Systems and methods for beam angle adjustment in ion implanters | |
| US7507978B2 (en) | Beam line architecture for ion implanter | |
| US20100065761A1 (en) | Adjustable deflection optics for ion implantation | |
| US8803110B2 (en) | Methods for beam current modulation by ion source parameter modulation | |
| US20160189917A1 (en) | Systems and methods for beam angle adjustment in ion implanters with beam decelaration | |
| JP5257576B2 (en) | System and method for implanting ions into a workpiece | |
| US20230038392A1 (en) | Blended energy ion implantation | |
| US7019314B1 (en) | Systems and methods for ion beam focusing | |
| TWI714074B (en) | Ion implantation system and method with variable energy control | |
| JP2024529935A (en) | Mixed Energy Ion Implantation | |
| TWI682420B (en) | Ion implantation system and method with variable energy control | |
| US20230038565A1 (en) | Method and apparatus for continuous chained energy ion implantation |