JP2023046339A - Display control device, head-up display apparatus and display control method - Google Patents
Display control device, head-up display apparatus and display control method Download PDFInfo
- Publication number
- JP2023046339A JP2023046339A JP2021154938A JP2021154938A JP2023046339A JP 2023046339 A JP2023046339 A JP 2023046339A JP 2021154938 A JP2021154938 A JP 2021154938A JP 2021154938 A JP2021154938 A JP 2021154938A JP 2023046339 A JP2023046339 A JP 2023046339A
- Authority
- JP
- Japan
- Prior art keywords
- display control
- image
- display
- image elements
- control process
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 85
- 238000004904 shortening Methods 0.000 claims abstract description 14
- 230000008569 process Effects 0.000 claims description 69
- 230000003287 optical effect Effects 0.000 claims description 21
- 238000012545 processing Methods 0.000 abstract description 41
- 230000000007 visual effect Effects 0.000 abstract description 7
- 230000008859 change Effects 0.000 description 61
- 238000012937 correction Methods 0.000 description 32
- 238000010586 diagram Methods 0.000 description 30
- 230000008901 benefit Effects 0.000 description 24
- 238000001514 detection method Methods 0.000 description 19
- 238000004891 communication Methods 0.000 description 15
- 206010034719 Personality change Diseases 0.000 description 13
- 230000015654 memory Effects 0.000 description 10
- 238000002834 transmittance Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 230000004888 barrier function Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 238000005286 illumination Methods 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000003491 array Methods 0.000 description 2
- 230000003190 augmentative effect Effects 0.000 description 2
- 210000000887 face Anatomy 0.000 description 2
- 239000003292 glue Substances 0.000 description 2
- 238000009877 rendering Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 230000010267 cellular communication Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 238000003702 image correction Methods 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 210000001747 pupil Anatomy 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images












Landscapes
- Instrument Panels (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Abstract
Description
本開示は、車両等の移動体で使用され、移動体の前景(車両の乗員から見た移動体の前進方向の実景)に画像を重畳して視認させる表示制御装置、ヘッドアップディスプレイ装置、及び表示制御方法等に関する。 The present disclosure relates to a display control device, a head-up display device, and a head-up display device that are used in a mobile object such as a vehicle and superimpose an image on the foreground of the mobile object (actual view in the forward direction of the mobile object seen from the vehicle occupant). It relates to a display control method and the like.
ヘッドアップディスプレイ(HUD:Head Up Display)装置は、自車両前方の風景に画像(仮想オブジェクト)を重ねて表示することで、実景又は実景に存在する実オブジェクトに情報などを付加・強調した拡張現実(AR:Augmented Reality)を表現し、車両を運転するユーザの視線移動を極力抑えつつ、所望の情報を的確に提供することで、安全で快適な車両運行に寄与することができるものである。 A head-up display (HUD) device is an augmented reality that adds and emphasizes information to a real scene or a real object existing in the real scene by superimposing an image (virtual object) on the scenery in front of the vehicle. (AR: Augmented Reality), it can contribute to safe and comfortable vehicle operation by accurately providing desired information while minimizing the movement of the user's line of sight when driving the vehicle.
特に、特許文献1に記載のヘッドアップディスプレイ装置は、車両の振動情報に基づいて、画像(仮想オブジェクト)の表示位置を補正することで、実景又は実景に存在する実オブジェクトに対する画像(仮想オブジェクト)の位置関係のズレを抑制することで、画像(仮想オブジェクト)と実景を調和させる。
In particular, the head-up display device described in
また、特許文献2に記載のヘッドアップディスプレイ装置は、路面に沿って配置され、遠近法で異なる距離感で表現された複数の画像要素(仮想オブジェクト)を表示することで、画像(仮想オブジェクト)と実景をより調和させている。
Further, the head-up display device described in
しかしながら、車両の姿勢変化に基づいて、距離感の異なる複数の画像要素(仮想オブジェクト)を個別にうまく画像補正することができない場合、画像(仮想オブジェクト)と実景(実オブジェクト)が調和しないため、観察者に違和感を与えることが想定される。 However, if multiple image elements (virtual objects) with different senses of distance cannot be individually and satisfactorily corrected based on changes in vehicle posture, the image (virtual object) and the real scene (real object) will not harmonize. It is assumed that the observer will feel uncomfortable.
また、例え、車両の姿勢変化に基づいて、距離感の異なる複数の画像要素(仮想オブジェクト)を個別にうまく画像補正ができたとしても、実オブジェクトと仮想オブジェクトとの違いにより、やはり観察者に違和感を与えることも想定される。 Moreover, even if we can successfully correct images individually for multiple image elements (virtual objects) with different senses of distance based on changes in the posture of the vehicle, the difference between the real object and the virtual object will still affect the viewer. It is also assumed that it gives a feeling of discomfort.
また、例え、車両の姿勢変化に基づく画像補正をしない場合でも、距離感の異なる複数の画像要素(仮想オブジェクト)が車両の姿勢変化に基づき直接的に実景(実オブジェクト)からずれるため、仮想現実感が損なわれ、やはり観察者に違和感を与えることも想定される。 In addition, even if image correction is not performed based on changes in the posture of the vehicle, multiple image elements (virtual objects) with different senses of distance are directly displaced from the actual scene (real objects) based on changes in the posture of the vehicle. It is also assumed that the feeling is lost and the observer feels uncomfortable.
本明細書に開示される特定の実施形態の要約を以下に示す。これらの態様が、これらの特定の実施形態の概要を読者に提供するためだけに提示され、この開示の範囲を限定するものではないことを理解されたい。実際に、本開示は、以下に記載された実施態様と、以下に記載されない種々の態様との組み合わせを包含し得る。 A summary of certain embodiments disclosed herein follows. It should be understood that these aspects are presented only to provide the reader with an overview of these particular embodiments and are not intended to limit the scope of this disclosure. Indeed, the present disclosure may encompass combinations of the embodiments described below and various aspects not described below.
本開示の概要は、視認性の高い画像を表示する表示制御装置、ヘッドアップディスプレイ装置、及び表示制御方法等を提供することに関する。より具体的には、虚像の視認における違和感を低減する、ことにも関する。 An overview of the present disclosure relates to providing a display control device, a head-up display device, a display control method, and the like that display an image with high visibility. More specifically, it also relates to reducing discomfort in viewing a virtual image.
したがって、本明細書に記載される表示制御装置、ヘッドアップディスプレイ装置、及び表示制御方法等は、前記課題を解決するため、以下の手段を採用した。本実施形態は、それらの間にギャップを有する複数の第1の画像要素を含み、遠近法を表現する第1の虚像を表示し、所定の視認性より高い第1の画像要素の間の前記ギャップの数を減らす、又はギャップを短くする第1の表示制御処理を実行する、ことをその要旨とする。 Therefore, the display control device, the head-up display device, the display control method, and the like described in this specification employ the following means in order to solve the above problems. The present embodiment includes a plurality of first image elements having gaps therebetween to display a first virtual image representing perspective, and wherein said first image elements between said first image elements having a visibility greater than a predetermined visibility. The gist of this is to execute a first display control process that reduces the number of gaps or shortens the gaps.
したがって、本明細書に記載される第1実施態様における表示制御装置は、移動体の前方の前景に画像を重ねて表示するヘッドアップディスプレイ装置を制御する表示制御装置において、1つ又は複数のプロセッサを有し、プロセッサは、それらの間にギャップを有する複数の第1の画像要素を含み、遠近法を表現する第1の虚像を表示し、複数の第1の画像要素は、同種の情報を表し、所定の視認性より高く、移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、第1の虚像に含まれる、所定の視認性より高い第1の画像要素の間のギャップの数を減らす。この場合、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことが一部視認しづらくなり、観察者に与える違和感を軽減することができるという利点を有している。 Therefore, the display control device in the first embodiment described in this specification is a display control device that controls a head-up display device that displays an image superimposed on the foreground in front of a moving object, and includes one or more processors: and the processor displays a first virtual image representing perspective, including a plurality of first image elements having gaps therebetween, the plurality of first image elements conveying the same kind of information and when it is detected, estimated, or predicted that the posture change of the moving object satisfies a predetermined condition, the visibility of the first image element included in the first virtual image is higher than the predetermined visibility. Reduce the number of gaps between In this case, each of the multiple image elements (virtual objects) deviates from the actual scene (real objects) due to changes in the vehicle's posture, which makes it difficult to see some of them, reducing the sense of discomfort felt by the observer. have advantages.
好ましい別の実施形態におけるいずれかの表示制御装置では、プロセッサは、第1の表示制御処理前の複数の第1の画像要素の一部を所定の視認性より低くする。この実施態様では、例えば、所定の視認性より高い複数(例えば、3つ)の第1の画像要素を含み、遠近法を表現する第1の虚像を表示する。この場合、所定の視認性より高い3つの第1の画像要素の間には、2つのギャップを有する。移動体の姿勢変動が所定条件を満たす場合、一部(例えば、1つ)の第1の画像要素を所定の視認性より低くする。これにより、所定の視認性より高い第1の画像要素の数は2つとなり、所定の視認性より高い2つの第1の画像要素の間のギャップは1つになる。つまり、第1の虚像に含まれる所定の視認性より高い第1の画像要素の間のギャップの数が減少する。移動体の姿勢変動が生じた際、所定の視認性より高い第1の画像要素が減少するので、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことが一部視認しづらくなり、観察者に与える違和感を軽減することができるという利点を有している。この実施形態におけるいずれかの表示制御装置では、プロセッサは、第1の表示制御処理後の所定の視認性より高い第1の画像要素の少なくとも1つが、第1の表示制御処理前の第1の虚像に含まれる全ての複数の第1の画像要素よりも大きくなるように第1の表示制御処理を実行する。例えば、所定の視認性より高い複数(例えば、3つ)の第1の画像要素を含み、遠近法を表現する第1の虚像を表示する。移動体の姿勢変動が所定条件を満たす場合、一部(例えば、1つ)の第1の画像要素を所定の視認性より低くし、残りの所定の視認性より高い第1の画像要素の少なくとも1つを大きくする。これにより、実景(実オブジェクト)からずれてしまう複数の画像要素(仮想オブジェクト)の一部を視認しづらくしつつ、第1の虚像が示す情報を伝達しやすくするという利点を有している。また、第1の画像要素を大きくすることで、第1の画像要素と実景(実オブジェクト)とのズレが生じにくくすることができる。 In any of the display control devices in another preferred embodiment, the processor reduces a portion of the plurality of first image elements prior to the first display control process below a predetermined visibility. In this embodiment, for example, a first virtual image representing perspective is displayed including a plurality (eg, three) of first image elements having higher than a predetermined visibility. In this case, there are two gaps between the three first image elements that are higher than the predetermined visibility. If the posture variation of the moving body satisfies a predetermined condition, some (for example, one) first image elements are made lower than a predetermined visibility. Thus, the number of first image elements having a visibility higher than the predetermined visibility is two, and the gap between two first image elements having a visibility higher than the predetermined visibility is one. That is, the number of gaps between the first image elements higher than the predetermined visibility included in the first virtual image is reduced. When the posture of the moving body changes, the number of first image elements having visibility higher than a predetermined value decreases, so that each of the plurality of image elements (virtual objects) deviates from the actual scene (real object) based on the change in the posture of the vehicle. This has the advantage that it is possible to reduce the sense of incongruity given to an observer by making it difficult to visually recognize a part of the image. In any one of the display control devices in this embodiment, the processor determines that at least one of the first image elements having visibility higher than a predetermined visibility after the first display control process is the first image element before the first display control process. A first display control process is performed so that the image becomes larger than all the plurality of first image elements included in the virtual image. For example, a first virtual image is displayed that includes a plurality (eg, three) of first image elements that are higher than a predetermined visibility and expresses perspective. When the posture variation of the moving body satisfies a predetermined condition, some (for example, one) first image elements are made lower in visibility than the predetermined visibility, and at least the remaining first image elements higher in visibility than the predetermined visibility are set. increase one. This has the advantage of facilitating the transmission of information indicated by the first virtual image while making some of the plurality of image elements (virtual objects) that deviate from the actual scene (real object) less visible. Further, by enlarging the first image element, it is possible to make it difficult for the first image element and the actual scene (real object) to be displaced.
好ましい別の実施形態におけるいずれかの表示制御装置では、プロセッサは、第1の表示制御処理前の複数の第1の画像要素の一部を非表示にする。この実施態様では、所定の視認性より高い複数(例えば、3つ)の第1の画像要素を含み、遠近法を表現する第1の虚像を表示する。この場合、所定の視認性より高い3つの第1の画像要素の間には、2つのギャップを有する。移動体の姿勢変動が所定条件を満たす場合、一部(例えば、1つ)の第1の画像要素を非表示にする。これにより、所定の視認性より高い第1の画像要素の数は2つとなり、所定の視認性より高い2つの第1の画像要素の間のギャップは1つなる。つまり、第1の虚像に含まれる所定の視認性より高い第1の画像要素の間のギャップの数が減少する。移動体の姿勢変動が生じた際、所定の視認性より高い第1の画像要素が減少するので、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことが一部視認できなくなり、観察者に与える違和感を軽減することができるという利点を有している。この実施形態におけるいずれかの表示制御装置では、プロセッサは、第1の表示制御処理後の所定の視認性より高い第1の画像要素の少なくとも1つが、第1の表示制御処理前の第1の虚像の全体に亘るように大きくするように第1の表示制御処理を実行する。例えば、所定の視認性より高い複数(例えば、3つ)の第1の画像要素を含み、遠近法を表現する第1の虚像を表示する。移動体の姿勢変動が所定条件を満たす場合、一部(例えば、1つ)の第1の画像要素を非表示にし、残りの所定の視認性より高い第1の画像要素の少なくとも1つが、第1の表示制御処理前の第1の虚像の全体に亘るように大きくするように第1の表示制御処理を実行する。これにより、実景(実オブジェクト)からずれてしまう複数の画像要素(仮想オブジェクト)の一部を視認できなくしつつ、第1の虚像が示す情報を伝達しやすくするという利点を有している。また、第1の画像要素を大きくすることで、第1の画像要素と実景(実オブジェクト)とのズレが生じにくくすることができる。 In any display control device in another preferred embodiment, the processor hides a portion of the plurality of first image elements prior to the first display control process. In this embodiment, a first virtual image representing perspective is displayed including a plurality (eg, three) of first image elements having greater than a predetermined visibility. In this case, there are two gaps between the three first image elements that are higher than the predetermined visibility. If the posture change of the moving object satisfies a predetermined condition, some (for example, one) first image elements are hidden. Thus, the number of first image elements having visibility higher than the predetermined visibility is two, and the gap between two first image elements having visibility higher than the predetermined visibility is one. That is, the number of gaps between the first image elements higher than the predetermined visibility included in the first virtual image is reduced. When the posture of the moving body changes, the number of first image elements having visibility higher than a predetermined value decreases, so that each of the plurality of image elements (virtual objects) deviates from the actual scene (real object) based on the change in the posture of the vehicle. This has the advantage that it is possible to reduce the sense of incongruity given to an observer by making it impossible to visually recognize a part of the distorted image. In any one of the display control devices in this embodiment, the processor determines that at least one of the first image elements having visibility higher than a predetermined visibility after the first display control process is the first image element before the first display control process. A first display control process is executed so as to enlarge the entire virtual image. For example, a first virtual image is displayed that includes a plurality (eg, three) of first image elements that are higher than a predetermined visibility and expresses perspective. When the posture variation of the moving body satisfies a predetermined condition, some (for example, one) first image elements are hidden, and at least one of the remaining first image elements with higher visibility than the predetermined visibility is displayed as the first image element. 1st display control processing is performed so that it may enlarge so that it may cover the whole 1st virtual image before display control processing of 1. FIG. This has the advantage of facilitating transmission of information indicated by the first virtual image while making some of the plurality of image elements (virtual objects) that deviate from the actual scene (real object) invisible. Further, by enlarging the first image element, it is possible to make it difficult for the first image element and the actual scene (real object) to be displaced.
また、別の実施態様における表示制御装置は、移動体の前方の前景に画像を重ねて表示するヘッドアップディスプレイ装置を制御する表示制御装置において、1つ又は複数のプロセッサを有し、プロセッサは、それらの間にギャップを有する複数の第1の画像要素を含み、遠近法を表現する第1の虚像を表示し、複数の第1の画像要素は、同種の情報を表し、所定の視認性より高く、移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、第1の虚像に含まれるギャップを短くする第1の表示制御処理を実行する。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが短くなることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差が縮まるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。 In another embodiment, a display control device is a display control device that controls a head-up display device that displays an image superimposed on a foreground in front of a moving body, and has one or more processors, wherein the processors are: Displaying a first virtual image representing perspective, the plurality of first image elements representing the same kind of information and having a gap therebetween, the plurality of first image elements representing the same kind of information, and If it is detected, estimated, or predicted that the posture variation of the moving body is high and satisfies a predetermined condition, the first display control process is executed to shorten the gap included in the first virtual image. In this case, even if individual vibration correction between multiple image elements (virtual objects) is not performed or if individual vibration correction does not work well (differences in sense of distance in perspective cannot be expressed well), multiple image elements (virtual objects) By shortening the gap between multiple image elements (virtual objects), the difference in sense of distance in perspective between multiple image elements (virtual objects) is reduced. This has the advantage that it is possible to reduce the sense of incongruity caused by deviation from the real scene (real object) based on the above.
この実施形態におけるいずれかの表示制御装置では、プロセッサは、第1の表示制御処理後の所定の視認性より高い第1の画像要素の少なくとも1つが、第1の表示制御処理前の第1の虚像に含まれる全ての複数の第1の画像要素よりも大きくなるように第1の表示制御処理を実行する。例えば、所定の視認性より高い複数(例えば、3つ)の第1の画像要素を含み、遠近法を表現する第1の虚像を表示する。移動体の姿勢変動が所定条件を満たす場合、画像要素間のギャップが小さくなるように、一部(例えば、1つ)の第1の画像要素を大きくする第1の表示制御処理を実行する。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが短くなることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差が縮まるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。また、第1の画像要素を大きくすることで、第1の画像要素と実景(実オブジェクト)とのズレが生じにくくすることができる。 In any one of the display control devices in this embodiment, the processor determines that at least one of the first image elements having visibility higher than a predetermined visibility after the first display control process is the first image element before the first display control process. A first display control process is performed so that the image becomes larger than all the plurality of first image elements included in the virtual image. For example, a first virtual image is displayed that includes a plurality (eg, three) of first image elements that are higher than a predetermined visibility and expresses perspective. When the posture variation of the moving body satisfies a predetermined condition, a first display control process is executed to enlarge a part (for example, one) of the first image elements so as to reduce the gap between the image elements. In this case, even if individual vibration correction between multiple image elements (virtual objects) is not performed or if individual vibration correction does not work well (differences in sense of distance in perspective cannot be expressed well), multiple image elements (virtual objects) By shortening the gap between multiple image elements (virtual objects), the difference in sense of distance in perspective between multiple image elements (virtual objects) is reduced. This has the advantage that it is possible to reduce the sense of incongruity caused by deviation from the real scene (real object) based on the above. Further, by enlarging the first image element, it is possible to make it difficult for the first image element and the actual scene (real object) to be displaced.
好ましい別の実施形態におけるいずれかの表示制御装置では、プロセッサは、移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、第1の虚像の表示距離を短くする第2の表示制御処理をさらに実行する。これによれば、車両の姿勢変動による画像(仮想オブジェクト)の変動量を小さく抑えることができ、延いては、画像(仮想オブジェクト)と実景(実オブジェクト)とのずれを抑制することができるという利点を有している。 In any one of the display control devices according to another preferred embodiment, the processor shortens the display distance of the first virtual image when it is detected, estimated, or predicted that the posture change of the moving body satisfies the predetermined condition. is further executed. According to this, it is possible to suppress the amount of change in the image (virtual object) due to the change in the attitude of the vehicle, and by extension, it is possible to suppress the deviation between the image (virtual object) and the actual scene (real object). have advantages.
好ましい別の実施形態におけるいずれかの表示制御装置では、プロセッサは、第2の表示制御処理において、時間経過に伴い、第1の虚像の表示距離を連続的又は段階的に短くする。これによれば、瞬時に表示距離が変化することに対する煩わしさの低減ができるという利点を有している。 In any one of the display control devices according to another preferred embodiment, the processor continuously or stepwise shortens the display distance of the first virtual image as time elapses in the second display control processing. According to this, there is an advantage that it is possible to reduce the annoyance of an instantaneous change in the display distance.
好ましい別の実施形態におけるいずれかの表示制御装置では、プロセッサは、第1の表示制御処理前の複数の第1の画像要素の間のギャップが短くなるように複数の画像要素を接近させることで、第1の虚像に含まれるギャップを短くする第1の表示制御処理を実行する。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが短くなることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差が縮まるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。 In any of the display control devices in another preferred embodiment, the processor moves the plurality of image elements closer together such that a gap between the plurality of first image elements before the first display control process is shortened. , a first display control process for shortening the gap included in the first virtual image. In this case, even if individual vibration correction between multiple image elements (virtual objects) is not performed or if individual vibration correction does not work well (differences in sense of distance in perspective cannot be expressed well), multiple image elements (virtual objects) By shortening the gap between multiple image elements (virtual objects), the difference in sense of distance in perspective between multiple image elements (virtual objects) is reduced. This has the advantage that it is possible to reduce the sense of incongruity caused by deviation from the real scene (real object) based on the above.
好ましい別の実施形態におけるいずれかの表示制御装置では、プロセッサは、第1の表示制御処理前の複数の第1の画像要素の間のギャップがなくなるように複数の画像要素を接着させる第1の表示制御処理を実行する。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが短くなることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差が縮まるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。 In any of the display control devices in another preferred embodiment, the processor comprises a first display controller that glues the plurality of image elements such that gaps between the plurality of first image elements before the first display control process are eliminated. Execute display control processing. In this case, even if individual vibration correction between multiple image elements (virtual objects) is not performed or if individual vibration correction does not work well (differences in sense of distance in perspective cannot be expressed well), multiple image elements (virtual objects) By shortening the gap between multiple image elements (virtual objects), the difference in sense of distance in perspective between multiple image elements (virtual objects) is reduced. This has the advantage that it is possible to reduce the sense of incongruity caused by deviation from the real scene (real object) based on the above.
好ましい別の実施形態におけるいずれかの表示制御装置では、プロセッサは、第1の表示制御処理前の複数の第1の画像要素の間のギャップを埋めるように配置される第2の画像要素を表示させる第1の表示制御処理を実行する。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが第2の画像要素で埋まることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差を観察者が感じにくくなるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。 In any of the display control devices in another preferred embodiment, the processor displays second image elements arranged to fill gaps between the plurality of first image elements before the first display control process. A first display control process is executed. In this case, even if individual vibration correction between multiple image elements (virtual objects) is not performed or if individual vibration correction does not work well (differences in sense of distance in perspective cannot be expressed well), multiple image elements (virtual objects) By filling the gap between the image elements (virtual objects) with the second image element, it becomes difficult for the observer to perceive the difference in perspective between the image elements (virtual objects). This has the advantage that it is possible to reduce the sense of incongruity caused by each of the virtual objects) deviating from the real scene (real object) based on the change in posture of the vehicle.
この実施形態におけるいずれかの表示制御装置では、第1の画像要素は、第2の画像要素より高い視認性を有する。複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減しつつ、情報を提示する第1の画像要素に視覚的注意が向きやすくすることができる。 In any display controller in this embodiment, the first image element has higher visibility than the second image element. Visual attention is directed to the first image element that presents information while reducing discomfort caused by each of a plurality of image elements (virtual objects) deviating from the actual scene (real object) based on changes in vehicle posture. can be made easier.
本明細書に記載される実施態様におけるヘッドアップディスプレイ装置では、いくつかの実施形態におけるいずれかの表示制御装置と、表示光を出射する光変調素子と、光変調素子からの表示光を被投影部にむけるリレー光学系と、を備える。この場合も、上記と同様の利点が想定される。 The head-up display device according to the embodiments described in this specification includes any display control device according to some embodiments, a light modulation element that emits display light, and the display light from the light modulation element to be projected. and a relay optical system directed to the part. Again, the same advantages as above are assumed.
本明細書に記載される実施態様における表示制御方法では、それらの間にギャップを有する複数の第1の画像要素を含み、遠近法を表現する第1の虚像を表示することと、前記複数の第1の画像要素は、同種の情報を表し、所定の視認性より高く、移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、前記第1の虚像に含まれる、前記所定の視認性より高い前記第1の画像要素の間の前記ギャップの数を減らす、又は前記ギャップを短くする第1の表示制御処理を実行することと、を含む。 In the display control method in the embodiments described herein, displaying a first virtual image representing a perspective including a plurality of first image elements having gaps therebetween; The first image element represents the same type of information, is higher than a predetermined visibility, and is included in the first virtual image when it is detected, estimated, or predicted that the posture change of the moving body satisfies a predetermined condition. and performing a first display control process that reduces the number of gaps or shortens the gaps between the first image elements that are higher than the predetermined visibility.
以下、図1ないし図13では、例示的な車両用表示システムの構成、及び動作の説明を提供する。なお、本発明は以下の実施形態(図面の内容も含む)によって限定されるものではない。下記の実施形態に変更(構成要素の削除も含む)を加えることができるのはもちろんである。また、以下の説明では、本発明の理解を容易にするために、公知の技術的事項の説明を適宜省略する。 1-13 below provide a description of the configuration and operation of an exemplary vehicular display system. In addition, the present invention is not limited by the following embodiments (including the contents of the drawings). Of course, modifications (including deletion of constituent elements) can be added to the following embodiments. In addition, in the following description, descriptions of known technical matters are omitted as appropriate in order to facilitate understanding of the present invention.
図1を参照する。図1は、車両用虚像表示システムの構成の一例を示す図である。なお、図1において、車両(移動体の一例。)1の左右方向(換言すると、車両1の幅方向)をX軸(X軸の正方向は、車両1の前方を向いた際の左方向。)とし、左右方向に直交すると共に、地面又は地面に相当する面(ここでは路面6)に直交する線分に沿う上下方向(換言すると、車両1の高さ方向)をY軸(Y軸の正方向は、上方向。)とし、左右方向及び上下方向の各々に直交する線分に沿う前後方向をZ軸(Z軸の正方向は、車両1の直進方向。)とする。この点は、他の図面においても同様である。
Please refer to FIG. FIG. 1 is a diagram showing an example of the configuration of a vehicle virtual image display system. In FIG. 1, the left-right direction of a vehicle (an example of a moving body) 1 (in other words, the width direction of the vehicle 1) is the X axis (the positive direction of the X axis is the left direction when the
図示するように、車両(自車両)1に備わる車両用表示システム10は、観察者(典型的には車両1の運転席に着座する運転者)の左目700Lと右目700Rの位置や視線方向を検出する瞳(あるいは顔)検出用の目位置検出部(視線検出部)409、車両1の前方(広義には周囲)を撮像するカメラ(例えばステレオカメラ)などで構成される車外センサ411、ヘッドアップディスプレイ装置(以下では、HUD装置とも呼ぶ)20及び、HUD装置20を制御する表示制御装置30、を有する。なお、目位置検出部(視線検出部)409、及び車外センサ411は、省略され得る。
As illustrated, a
図2は、ヘッドアップディスプレイ装置の構成の一態様を示す図である。HUD装置20は、例えばダッシュボード(図1の符号5)内に設置される。このHUD装置20は、立体画像表示装置(画像表示装置)40、リレー光学系80及び、これら画像表示装置40とリレー光学系80を収納し、画像表示装置40からの表示光Kを内部から外部に向けて出射可能な光出射窓21を有する筐体22、を有する。なお、画像表示装置40は、3D画像を表示する立体画像表示装置に限定されるものではなく、2D画像を表示するものであってもよい。
FIG. 2 is a diagram showing one aspect of the configuration of the head-up display device. The
画像表示装置40は、ここでは視差式3D表示装置とする。この立体表示装置(視差式3D表示装置)40は、左視点画像と右視点画像と視認させることで奥行き表現を制御可能な多視点画像表示方式を用いた裸眼立体表示装置である表示器50及び、バックライトとして機能する光源ユニット60、により構成される。
The
表示器50は、光源ユニット60からの照明光を光変調して画像を生成する光変調素子51及び、例えば、レンチキュラレンズやパララックスバリア(視差バリア)等を有し、光変調素子51から出射される光を、左目用の光線K11、K12及び、K13等の左目用表示光(図1の符号K10)と、右目用の光線K21、K22及び、K23等の右目用表示光(図1の符号K20)とに分離する光学レイヤ(光線分離部の一例。)52、を有する。光学レイヤ52は、レンチキュラレンズ、パララックスバリア、レンズアレイ及び、マイクロレンズアレイなどの光学フィルタを含む。実施形態で光学レイヤ52は、前述した光学フィルタに限定されることなく、光変調素子51の前面又は後面に配置される全ての形態の光学レイヤを含む。但し、これは一例であり、限定されるものではない。
The display 50 has a light modulation element 51 that modulates the illumination light from the
また、画像表示装置40は、光学レイヤ(光線分離部の一例。)52の代わりに又は、それに加えて、光源ユニット60を指向性バックライトユニット(光線分離部の一例。)で構成することで、左目用の光線K11、K12及び、K13等の左目用表示光(図1の符号K10)と、右目用の光線K21、K22及び、K23等の右目用表示光(図1の符号K20)と、を出射させてもよい。具体的に、例えば、後述する表示制御装置30は、指向性バックライトユニットが左目700Lに向かう照明光を照射した際に、光変調素子51に左視点画像を表示させることで、左目用の光線K11、K12及び、K13等の左目用表示光K10を、観察者の左目700Lに向け、指向性バックライトユニットが右目700Rに向かう照明光を照射した際に、光変調素子51に右視点画像を表示させることで、右目用の光線K21、K22及び、K23等の右目用表示光K20を、観察者の左目700Lに向ける。但し、これは一例であり、限定されるものではない。
Further, in the
後述する表示制御装置30は、例えば、画像レンダリング処理(グラフィック処理)、表示器駆動処理などを実行することで、観察者の左目700Lへ左視点画像V10の左目用表示光K10及び、右目700Rへ右視点画像V20の右目用表示光K20、を向け、左視点画像V10及び右視点画像V20を調整することで、HUD装置20が表示する(観察者が知覚する)知覚画像FUの態様を制御することができる。なお、後述する表示制御装置30は、一定空間に存在する点などから様々な方向に出力される光線をそのまま(概ね)再現するライトフィールドを再現するように、ディスプレイ(表示器50)を制御してもよい。
The
リレー光学系80は、画像表示装置40からの光を反射し、画像の表示光K10、K20を、ウインドシールド(被投影部材)2に投影する曲面ミラー(凹面鏡等)81、82を有する。但し、その他の光学部材(レンズなどの屈折光学部材、ホログラムなどの回折光学部材、反射光学部材又は、これらの組み合わせを含んでいてもよい。)を、さらに有してもよい。
The relay
図1では、HUD装置20の画像表示装置40によって、左右の各目用の、視差をもつ画像(視差画像)が表示される。各視差画像は、図1に示されるように、虚像表示面(虚像結像面)VSに結像したV10、V20として表示される。観察者(人)の各目のピントは、虚像表示領域VSの位置に合うように調節される。なお、虚像表示領域VSの位置を、「調節位置(又は結像位置)」と称し、また、所定の基準位置(例えば、HUD装置20のアイボックス200の中心205、観察者の視点位置、又は、車両1の特定位置など)から虚像表示領域VSまでの距離を調節距離(結像距離)と称する。
In FIG. 1, the
但し、実際は、人の脳が、各画像(虚像)を融像するため、人は、調節位置よりもさらに奥側である位置(例えば、左視点画像V10と右視点画像V20との輻輳角によって定まる位置であり、輻輳角が小さくなるほど、観察者から離れた位置にあるように知覚される位置)に、知覚画像(ここでは、ナビゲーション用の矢先の図形)FUが表示されているように認識する。なお、知覚画像FUは、「立体虚像」と称される場合があり、また、「画像」を広義に捉えて虚像も含まれるとする場合には、「立体画像」と称することもできる。また、「立体像」、「3D表示」等と称される場合がある。 However, in reality, since the human brain fuses each image (virtual image), the human is at a position farther back than the adjustment position (for example, due to the convergence angle between the left viewpoint image V10 and the right viewpoint image V20). It is a fixed position, and the position perceived as being farther away from the observer as the angle of convergence decreases) is recognized as a perceptual image (here, an arrowhead figure for navigation) FU is displayed. do. Note that the perceptual image FU may be referred to as a "stereoscopic virtual image", and may also be referred to as a "stereoscopic image" when the "image" is taken in a broad sense to include virtual images. It may also be referred to as a "stereoscopic image", "3D display", or the like.
図3は、いくつかの実施形態に係る、車両用虚像表示システムのブロック図である。表示制御装置30は、1つ又は複数のI/Oインタフェース31、1つ又は複数のプロセッサ33、1つ又は複数の表示制御処理回路35、及び1つ又は複数のメモリ37を備える。図3は、1つの実施形態に過ぎず、図示された構成要素は、より数の少ない構成要素に組み合わされてもよく、又は追加の構成要素があってもよい。例えば、表示制御処理回路35(例えば、グラフィック処理ユニット)が、1つ又は複数のプロセッサ33に含まれてもよい。
FIG. 3 is a block diagram of a vehicular virtual image display system, according to some embodiments. The
図示するように、プロセッサ33及び表示制御処理回路35は、メモリ37と動作可能に連結される。より具体的には、プロセッサ33及び表示制御処理回路35は、メモリ37に記憶されているプログラムを実行することで、例えば画像データを生成、及び/又は送信するなど、車両用表示システム10(画像表示装置40)の制御を行うことができる。プロセッサ33及び/又は表示制御処理回路35は、少なくとも1つの汎用マイクロプロセッサ(例えば、中央処理装置(CPU))、少なくとも1つの特定用途向け集積回路(ASIC)、少なくとも1つのフィールドプログラマブルゲートアレイ(FPGA)、又はそれらの任意の組み合わせを含むことができる。メモリ37は、ハードディスクのような任意のタイプの磁気媒体、CD及びDVDのような任意のタイプの光学媒体、揮発性メモリのような任意のタイプの半導体メモリ、及び不揮発性メモリを含む。揮発性メモリは、DRAM及びSRAMを含み、不揮発性メモリは、ROM及びNVRAMを含んでもよい。
As shown,
図示するように、プロセッサ33は、I/Oインタフェース31と動作可能に連結されている。I/Oインタフェース31は、例えば、車両に設けられた後述の車両ECU401及び/又は、他の電子機器(後述する符号403~419)と、CAN(Controller Area Network)の規格に応じて通信(CAN通信とも称する)を行う。なお、I/Oインタフェース31が採用する通信規格は、CANに限定されず、例えば、CANFD(CAN with Flexible Data Rate)、LIN(Local Interconnect Network)、Ethernet(登録商標)、MOST(Media Oriented Systems Transport:MOSTは登録商標)、UART、もしくはUSBなどの有線通信インタフェース、又は、例えば、Bluetooth(登録商標)ネットワークなどのパーソナルエリアネットワーク(PAN)、802.11x Wi-Fi(登録商標)ネットワークなどのローカルエリアネットワーク(LAN)等の数十メートル内の近距離無線通信インタフェースである車内通信(内部通信)インタフェースを含む。また、I/Oインタフェース31は、無線ワイドエリアネットワーク(WWAN0、IEEE802.16-2004(WiMAX:Worldwide Interoperability for Microwave Access))、IEEE802.16eベース(Mobile WiMAX)、4G、4G-LTE、LTE Advanced、5Gなどのセルラー通信規格により広域通信網(例えば、インターネット通信網)などの車外通信(外部通信)インタフェースを含んでいてもよい。
As shown,
図示するように、プロセッサ33は、I/Oインタフェース31と相互動作可能に連結されることで、車両用表示システム10(I/Oインタフェース31)に接続される種々の他の電子機器等と情報を授受可能となる。I/Oインタフェース31には、例えば、車両ECU401、道路情報データベース403、自車位置検出部405、操作検出部407、目位置検出部409、車外センサ411、明るさ検出部413、姿勢検出部415、携帯情報端末417、及び外部通信機器419などが動作可能に連結される。なお、I/Oインタフェース31は、車両用表示システム10に接続される他の電子機器等から受信する情報を加工(変換、演算、解析)する機能を含んでいてもよい。
As shown, the
画像表示装置40は、プロセッサ33及び表示制御処理回路35に動作可能に連結される。したがって、光変調素子51によって表示される画像は、プロセッサ33及び/又は表示制御処理回路35から受信された画像データに基づいてもよい。プロセッサ33及び表示制御処理回路35は、I/Oインタフェース31から取得される情報に基づき、光変調素子51が表示する画像を制御する。
メモリ37に記憶されたソフトウェア構成要素は、姿勢変化検知モジュール502、姿勢変化推定モジュール504、姿勢変化予測モジュール506、表示パラメータ設定モジュール512、グラフィックモジュール514、ずれ量算出モジュール522、及び補正量算出モジュール524を含む。
The software components stored in the memory 37 include a posture change detection module 502, a posture
図4は、いくつかの実施形態に従って、第1の表示制御処理を実行する方法S100を示すフロー図である。方法S100は、画像表示装置40(光変調素子51)と、この画像表示装置40(光変調素子51)を制御する表示制御装置30と、において実行される。方法S100内のいくつかの動作は任意選択的に組み合わされ、いくつかの動作の手順は任意選択的に変更され、いくつかの動作は任意選択的に省略される。
FIG. 4 is a flow diagram illustrating a method S100 of performing a first display control process, according to some embodiments. The method S100 is performed in the image display device 40 (light modulation element 51) and the
表示制御装置30(プロセッサ33)は、I/Oインタフェース31から取得する情報に基づき、画像データを生成し、画像表示装置40(光変調素子51)に出力することで、観察者の前景に重ねて第1の虚像V1(虚像)V1を表示する(ステップS110)。
The display control device 30 (processor 33) generates image data based on the information acquired from the I/
ステップS130では、表示制御装置30(プロセッサ33)は、I/Oインタフェース31を介して移動体の姿勢変動に関する情報を取得する。表示制御装置30(プロセッサ33)は、姿勢検出部415から移動体の姿勢変動を示す情報(姿勢変動情報)を取得する(S132)。姿勢検出部415は、例えば、ジャイロセンサ、加速度センサ、及びハイトセンサなどの1つ以上を含む。すなわち、前記姿勢変動情報は、移動体の角速度、加速度、高さ、車両姿勢(ピッチ角、ロール角等)、前記車両姿勢の変化の周波数(振動周波数)などである。
In step S<b>130 , the display control device 30 (processor 33 ) acquires information about the posture change of the moving object via the I/
表示制御装置30(プロセッサ33)は、姿勢変化検知モジュール502を実行することで、前記姿勢変動情報に基づいて、移動体の姿勢変動が所定条件を満たすか判定する(S150)。姿勢変化検知モジュール502は、前記姿勢変動情報に基づいて、姿勢変動があること、所定の大きさの姿勢変動があること、所定の速さの姿勢変動があること、所定の周波数の姿勢変動があること、などを検知することに関係する様々な動作を実行するための様々なソフトウェア構成要素を含む。すなわち、姿勢変化検知モジュール502は、I/Oインタフェース31から取得される様々な情報から、移動体の姿勢変動が所定条件を満たすか判定するための判定閾値、テーブルデータ、演算式、などを含み得る。
The display control device 30 (processor 33) executes the posture change detection module 502 to determine whether the posture change of the moving body satisfies a predetermined condition based on the posture change information (S150). Based on the posture variation information, the posture change detection module 502 detects that there is posture variation, that there is posture variation of a predetermined magnitude, that there is posture variation at a predetermined speed, and that there is posture variation at a predetermined frequency. It includes various software components for performing various operations related to detecting a presence, etc. That is, the attitude change detection module 502 includes determination thresholds, table data, arithmetic expressions, etc. for determining whether or not the attitude change of the moving object satisfies a predetermined condition from various information acquired from the I/
いくつかの実施形態では、表示制御装置30(プロセッサ33)は、I/Oインタフェース31を介して車両ECU401、車外センサ411など(これらに限定されない)から移動体の姿勢変動を推定可能な情報(姿勢変動推定情報)を取得する(S134)。
In some embodiments, the display control device 30 (processor 33) uses information (not limited to) from the
表示制御装置30(プロセッサ33)は、姿勢変化推定モジュール504を実行することで、前記姿勢変動推定情報に基づいて、移動体の姿勢変動が所定条件を満たすと推定されるか判定する(S150)。姿勢変化推定モジュール504は、前記姿勢変動推定情報に基づいて、姿勢変動があること、所定の大きさの姿勢変動があること、所定の速さの姿勢変動があること、所定の周波数の姿勢変動があること、などを推定することに関係する様々な動作を実行するための様々なソフトウェア構成要素を含む。すなわち、姿勢変化推定モジュール504は、I/Oインタフェース31から取得される様々な情報から、移動体の姿勢変動が所定条件を満たすか推定するための判定閾値、テーブルデータ、演算式、などを含み得る。姿勢変化推定モジュール504は、車両ECU401から取得される速度の変化率(加速度)に応じて、移動体の姿勢変動が所定条件を満たすと推定されるか判定する。また、姿勢変化推定モジュール504は、車外センサ411から取得される車外の実オブジェクトの位置(座標)の変化に応じて、移動体の姿勢変動が所定条件を満たすと推定されるか判定する。なお、移動体の姿勢変動を推定する方法は、これらに限定されず、公知の様々な方法を適用し得る。
The display control device 30 (processor 33) executes the posture
いくつかの実施形態では、表示制御装置30(プロセッサ33)は、I/Oインタフェース31を介して道路情報データベース403、外部通信機器419など(これらに限定されない)から移動体の姿勢変動を予測可能な情報(姿勢変動予測情報)を取得する(S136)。
In some embodiments, the display control device 30 (processor 33) can predict the attitude change of the moving body from (but not limited to) the road information database 403, the
表示制御装置30(プロセッサ33)は、姿勢変化予測モジュール506を実行することで、前記姿勢変動予測情報に基づいて、移動体の姿勢変動が所定条件を満たすと予測されるか判定する(S150)。姿勢変化予測モジュール506は、前記姿勢変動予測情報に基づいて、姿勢変動があること、所定の大きさの姿勢変動があること、所定の速さの姿勢変動があること、所定の周波数の姿勢変動があること、などを予測することに関係する様々な動作を実行するための様々なソフトウェア構成要素を含む。姿勢変化予測モジュール506は、道路情報データベース403から取得される姿勢変動が所定条件を満たすと予測される路面の位置情報に応じて、近い将来、移動体の姿勢変動が所定条件を満たすと予測されるか判定する。また、姿勢変化推定モジュール504は、移動体の前方を走行する先行車両との車車間通信により外部通信機器419から取得される先行車両の姿勢変動が生じた位置情報に応じて、移動体の姿勢変動が所定条件を満たすと予測されるか判定する。なお、移動体の姿勢変動を予測する方法は、これらに限定されず、公知の様々な方法を適用し得る。
The display control device 30 (processor 33) executes the posture
ステップS150では、表示制御装置30(プロセッサ33)は、I/Oインタフェース31を介して取得した前記姿勢変動情報(前記姿勢変動推定情報、前記姿勢変動予測情報)に基づき、移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測されたかを判定する。移動体の姿勢変動が所定条件を満たすと判定された場合、ステップS170へ移行する。なお、表示制御装置30は、これらの判定を行う機能を有さず、前記判定結果を外部(表示制御装置30とは異なる装置)から取得するものであってもよい。したがって、姿勢変化検知モジュール502、姿勢変化推定モジュール504、及び姿勢変化予測モジュール506は、省略され得る。
In step S<b>150 , the display control device 30 (processor 33 ), based on the posture variation information (the posture variation estimation information and the posture variation prediction information) acquired via the I/
ステップS170では、表示制御装置30(プロセッサ33)は、表示パラメータ設定モジュール512により、少なくとも第1の表示制御処理(ステップS180)を行い、さらに、第2の表示制御処理(ステップS190)を行ってもよい。 In step S170, the display control device 30 (processor 33) uses the display parameter setting module 512 to perform at least the first display control process (step S180), and further performs the second display control process (step S190). good too.
表示パラメータ設定モジュール512は、I/Oインタフェース31から取得される様々な情報やコマンドに基づき、表示する虚像の表示パラメータを設定することに関係する様々な動作を実行するための様々なソフトウェア構成要素を含む。すなわち、表示パラメータ設定モジュール512は、I/Oインタフェース31から取得される様々な情報から、表示パラメータを特定するためのテーブルデータ、演算式、などを含み得る。
Display parameter setting module 512 includes various software components for performing various operations related to setting display parameters of a virtual image to be displayed based on various information and commands obtained from I/
表示パラメータは、表示される画像の、種類、配置(位置座標、角度)、サイズ、表示距離(3Dの場合。)、視覚的効果(例えば、輝度、透明度、彩度、コントラスト、又は他の視覚特性)、を変更するためのパラメータを含む。具体的に例えば、表示パラメータは、(1)目位置700から見て、車両1の外側に位置する実オブジェクトと所定の位置関係になるように画像を配置するためのパラメータ(画像の配置を制御するために表示器50を制御するパラメータ、及び/又はアクチュエータ28,29を制御すパラメータ。)、(2)画像のサイズや配置を変更するためのパラメータ(画像のサイズや配置を制御するために表示器50を制御するパラメータ)、(3)画像の表示又は非表示を切り替えるパラメータ(表示器50を制御するパラメータ)、(4)目位置700から見た虚像光学系90などにより生じ得る画像の歪みを軽減するために画像を事前に歪ませるためのパラメータ(表示器50上で表示される画像を事前に歪ませるために表示器50を制御するパラメータであり、ワーピングパラメータとも呼ばれる。)、(5)画像の透過率、輝度、明度などの視認性を制御するパラメータ(画像の透過率、輝度、明度などを制御するために表示器50を制御するパラメータ、及び/又は画像の透過率、輝度、明度などを制御するために光源ユニット60を制御するパラメータ。)、(6)目位置から見て、所望の遠近感を表現するためのパラメータ(表示器50を制御するパラメータ、アクチュエータを制御するパラメータ。)、などを含む。ただし、表示パラメータ設定モジュール512が設定(選択)する表示パラメータは、これらに限定されない。
Display parameters include the type, placement (positional coordinates, angle), size, viewing distance (in the case of 3D), visual effects (e.g., brightness, transparency, saturation, contrast, or other visual effects) of the displayed image. properties), including parameters for changing Specifically, for example, the display parameters include: (1) parameters for arranging an image so as to have a predetermined positional relationship with a real object positioned outside the
本実施形態の表示制御装置30(プロセッサ33)は、移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、表示パラメータ設定モジュール512により第1の表示制御処理(ステップS180)を実行することで、画像に含まれる、所定の視認性より高い画像要素の間のギャップの数を減らす、又はギャップを短くする。 The display control device 30 (processor 33) of the present embodiment performs first display control processing (step S180) by the display parameter setting module 512 when detecting, estimating, or predicting that the posture change of the moving object satisfies a predetermined condition. ) to reduce the number of gaps or shorten the gaps between image elements contained in the image that are higher than a given visibility.
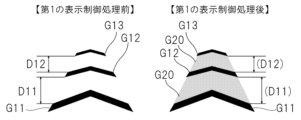
図5は、観察者が前方を向いた際に視認される、車両の前景、及びヘッドアップディスプレイ装置20が表示する第1の表示制御処理前の第1画像、を示す図である。第1の表示制御処理前の第1の虚像V1は、それらの間にギャップD10(図5の例では、D11,D12)を有する複数(図5の例では3個)の第1の画像要素G10(図5の例では、G11、G12、G13)を、観察者から見て上下方向(Y軸方向)にサイズを徐変しながら並べて表示することで遠近法を表現する。図5の例では、第1の画像要素G10は、観察者から見て下から上への方向(Y軸正方向)に向かって、G11、G12、G13の順に配置され、G11とG12との間に配置されるギャップD11、及びG12とG13との間に配置されるギャップD12からなる2つのギャップD10を有する。ここで、第1の画像要素G11,G12,G13は、いずれも第1の視認性より高い視認性を有するものとする。ここで、視認性は、例えば、輝度、又は透過率である。すなわち、第1の画像要素G11,G12,G13は、いずれも第1の輝度より高い輝度、及び/又は第1の透過率より低い透過率を有する。第1の画像要素G11,G12,G13は、いずれも経路を案内する図形であり、同種の情報を表している。
FIG. 5 is a diagram showing the foreground of the vehicle and the first image before the first display control process displayed by the head-up
図6乃至図12は、左図が第1の表示処理前の虚像を示し、右図が第1の表示処理後の虚像を示すである。図13は、横軸が時間、縦軸が表示距離を示し、第2の表示制御処理を説明するための図である。 6 to 12, the left figures show the virtual images before the first display processing, and the right figures show the virtual images after the first display processing. FIG. 13 is a diagram for explaining the second display control process, in which the horizontal axis indicates time and the vertical axis indicates display distance.
(第1の実施形態)
いくつかの実施態様における表示制御装置30では、プロセッサ33は、第1の表示制御処理(ステップS182)を実行することで、第1の虚像V1に含まれる、所定の視認性より高い第1の画像要素の間のギャップD10の数を減らす。いずれかの表示制御装置では、プロセッサ33は、図6に示すように、第1の表示制御処理前の複数の第1の画像要素G10の一部を所定の視認性より低くする。図6の例では、所定の第1の視認性より高い複数(例えば、3つ)の第1の画像要素G11,G12,G13を含み、遠近法を表現する第1の虚像V1を表示する(図6の左図)。この場合、所定の視認性より高い3つの第1の画像要素G10の間には、2つのギャップD11,D12を有する。移動体の姿勢変動が所定条件を満たす場合、図6の右図に示すように、一部(例えば、2つ)の第1の画像要素G11、G13を第1の視認性より低くする。これにより、第1の視認性より高い第1の画像要素の数は1つとなり、第1の視認性より高い第1の画像要素は、1つ(G12)だけになるため、第1の視認性より高い第1の画像要素の間のギャップはゼロになる(ゼロでなく、1つでもよい)。つまり、第1の虚像V1に含まれる第1の視認性より高い第1の画像要素G10の間のギャップの数が減少する。移動体の姿勢変動が生じた際、第1の視認性より高い第1の画像要素G10が減少するので、複数の画像要素(仮想オブジェクト)G10のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことが一部視認しづらくなり、観察者に与える違和感を軽減することができるという利点を有している。
(First embodiment)
In the
(第2の実施形態)
好ましい別の実施形態におけるいずれかの表示制御装置では、プロセッサ33は、第1の表示制御処理前の複数の第1の画像要素G10の一部を非表示にする。この実施態様では、プロセッサ33は、第1の表示制御処理(ステップS182)を実行することで、一部(例えば、2つ)の第1の画像要素G11,G13を非表示にする。これにより、第1の視認性より高い第1の画像要素G10の数は1つ(G12)となり、第1の視認性より高い第1の画像要素の間のギャップD10はゼロになる。つまり、第1の虚像V1に含まれる第1の視認性より高い第1の画像要素G10の間のギャップD10の数が減少する。移動体の姿勢変動が生じた際、第1の視認性より高い第1の画像要素が減少するので、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことが一部視認できなくなり、観察者に与える違和感を軽減することができるという利点を有している。
(Second embodiment)
In any display control device in another preferred embodiment, the
(第3の実施形態)
第1又は第2の実施形態におけるいずれかの表示制御装置30では、プロセッサ33は、第1の表示制御処理(ステップS182)において、第1の表示制御処理後の第1の視認性より高い第1の画像要素G12の少なくとも1つを大きくする。図7に示す例では、プロセッサ33は、第1の表示制御処理(ステップS182)を実行することで、一部(例えば、2つ)の第1の画像要素G11,G13を第1の視認性より低くし、残りの第1の視認性より高い第1の画像要素G12の少なくとも1つを大きくする。これにより、実景(実オブジェクト)からずれてしまう複数の画像要素(仮想オブジェクト)の一部を視認しづらくしつつ、第1の虚像V1が示す情報を伝達しやすくするという利点を有している。また、第1の画像要素を大きくすることで、第1の画像要素と実景(実オブジェクト)とのズレが生じにくくすることができる。
(Third embodiment)
In the
(第4の実施形態)
第1又は第2の実施形態におけるいずれかの表示制御装置30では、プロセッサ33は、第1の表示制御処理後の第1の視認性より高い第1の画像要素の少なくとも1つが、第1の表示制御処理前の第1の虚像V1の全体に亘るように大きくするように第1の表示制御処理を実行する。図8に示す例では、プロセッサ33は、第1の表示制御処理(ステップS182)を実行することで、一部(例えば、1つ)の第1の画像要素を非表示にし、残りの第1の視認性より高い第1の画像要素の少なくとも1つが、第1の表示制御処理前の第1の虚像V1の全体に亘るように大きくするように第1の表示制御処理を実行する。これにより、実景(実オブジェクト)からずれてしまう複数の画像要素(仮想オブジェクト)の一部を視認できなくしつつ、第1の虚像V1が示す情報を伝達しやすくするという利点を有している。また、第1の画像要素を大きくすることで、第1の画像要素と実景(実オブジェクト)とのズレが生じにくくすることができる。
(Fourth embodiment)
In the
(第5の実施形態)
また、別の実施態様における表示制御装置30では、プロセッサ33は、第1の表示制御処理(ステップS184)を実行することで、第1の虚像V1に含まれるギャップを短くする。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが短くなることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差が縮まるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。
(Fifth embodiment)
Moreover, in the
(第6の実施形態)
第5の実施形態におけるいずれかの表示制御装置30では、プロセッサ33は、第1の表示制御処理前の複数の第1の画像要素の間のギャップが短くなるように複数の画像要素を接近させることで、第1の虚像V1に含まれるギャップを短くする第1の表示制御処理を実行する。いずれかの表示制御装置30では、プロセッサ33は、移動体の姿勢変動が所定条件を満たす場合、図9の右図に示すように、第1の画像要素G11、G13を、第1の画像要素G12に接近させることで、第1の画像要素G11、G12の間のギャップD11、及び第1の画像要素G12、G13の間のギャップD12のそれぞれが短くなる。これによれば、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが短くなることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差が縮まるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができる。
(Sixth embodiment)
In any
(第7の実施形態)
第5の実施形態におけるいずれかの表示制御装置30では、プロセッサ33は、第1の表示制御処理前の複数の第1の画像要素の間のギャップがなくなるように複数の画像要素を接着させる第1の表示制御処理を実行する。いずれかの表示制御装置30では、プロセッサ33は、移動体の姿勢変動が所定条件を満たす場合、図10の右図に示すように、第1の画像要素G11、G13を、第1の画像要素G12に接着させることで、第1の画像要素G11、G12の間のギャップD11、及び第1の画像要素G12、G13の間のギャップD12のそれぞれがなくなる(概ねなくなる)。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが短くなることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差が縮まるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。
(Seventh embodiment)
In any
(第8の実施形態)
第5の実施形態におけるいずれかの表示制御装置30では、プロセッサ33は、第1の表示制御処理前の複数の第1の画像要素の間のギャップを埋めるように配置される第2の画像要素を表示させる第1の表示制御処理を実行する。いずれかの表示制御装置30では、プロセッサ33は、移動体の姿勢変動が所定条件を満たす場合、図11の右図に示すように、第1の画像要素G11、G12の間のギャップD11、及び第1の画像要素G12、G13の間のギャップD12のそれぞれがなくなるように、第2の画像要素G20を追加する。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが第2の画像要素で埋まることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差を観察者が感じにくくなるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。なお、第2の画像要素G20は、第1の画像要素の間のギャップがなくなるように配置されるものでなくてもよく、第1の画像要素の間のギャップの一部が埋まるように配置されるものであってもよい。
(Eighth embodiment)
In any
(第9の実施形態)
第8の実施形態におけるいずれかの表示制御装置30では、第1の画像要素G10は、第2の画像要素G20より高い視認性を有する。複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減しつつ、情報を提示する第1の画像要素に視覚的注意が向きやすくすることができる。
(Ninth embodiment)
In any
(第10の実施形態)
第5の実施形態におけるいずれかの表示制御装置30では、プロセッサ33は、第1の表示制御処理後の第1の視認性より高い第1の画像要素の少なくとも1つが、第1の表示制御処理前の第1の画像要素よりも大きくなるように第1の表示制御処理を実行する。図12に示す例では、第1の視認性より高い複数(例えば、3つ)の第1の画像要素を含み、遠近法を表現する第1の虚像V1を表示する。移動体の姿勢変動が所定条件を満たす場合、画像要素間のギャップが小さくなるように、少なくとも一部(例えば、3つ全部)の第1の画像要素を大きくする第1の表示制御処理を実行する。この場合、複数の画像要素(仮想オブジェクト)の間の個別の振動補正を行わない場合や個別の振動補正がうまくいかない(遠近法における距離感の差をうまく表現できない)場合でも、複数の画像要素(仮想オブジェクト)の間のギャップが短くなることで、複数の画像要素(仮想オブジェクト)の間の遠近法における距離感の差が縮まるため、複数の画像要素(仮想オブジェクト)のそれぞれが車両の姿勢変化に基づき実景(実オブジェクト)からずれてしまうことにより生じる違和感を軽減することができるという利点を有している。また、第1の画像要素を大きくすることで、第1の画像要素と実景(実オブジェクト)とのズレが生じにくくすることができる。
(Tenth embodiment)
In any one of the
(第11の実施形態)
第1乃至第11の実施形態におけるいずれかの表示制御装置30では、プロセッサ33は、移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、第1の虚像V1の表示距離を短くする第2の表示制御処理(ステップS190)をさらに実行する。これによれば、車両の姿勢変動による画像(仮想オブジェクト)の変動量を小さく抑えることができ、延いては、画像(仮想オブジェクト)と実景(実オブジェクト)とのずれを抑制することができるという利点を有している。
(Eleventh embodiment)
In any one of the
(第12の実施形態)
第11の実施形態におけるいずれかの表示制御装置30では、プロセッサ33は、第2の表示制御処理(ステップS190)において、時間経過に伴い、第1の虚像V1の表示距離を連続的又は段階的に短くする。図13に示す例では、プロセッサ33は、時間t1から第2の表示制御処理(ステップS190)を開始し、時間経過に伴い、第1の虚像V1の表示距離を連続的に短くする(但し、時間経過に伴う段階的な変化であってもよい)。これによれば、瞬時に表示距離が変化することに対する煩わしさの低減ができるという利点を有している。
(Twelfth embodiment)
In any
本明細書に記載されるヘッドアップディスプレイ装置20では、いくつかの実施形態におけるいずれかの表示制御装置30と、表示光を出射する光変調素子51と、光変調素子51からの表示光を被投影部2にむけるリレー光学系80と、を備える。この場合も、上記と同様の利点が想定される。
In the head-up
本明細書に記載される表示制御方法では、それらの間にギャップを有する複数の第1の画像要素を含み、遠近法を表現する第1の虚像V1を表示することと、複数の第1の画像要素G10は、同種の情報を表し、第1の視認性より高く、移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、第1の虚像V1に含まれる、第1の視認性より高い第1の画像要素G10の間のギャップD10の数を減らす、又はギャップD10を短くする第1の表示制御処理を実行することと、を含む。 In the display control method described herein, displaying a first virtual image V1 including a plurality of first image elements having gaps therebetween and expressing perspective; The image element G10 represents the same type of information, is higher than the first visibility, and is included in the first virtual image V1 when it is detected, estimated, or predicted that the posture change of the moving object satisfies a predetermined condition. and performing a first display control process to reduce the number of gaps D10 between the first image elements G10 having visibility greater than 1, or to shorten the gaps D10.
再び図3を参照する。グラフィックモジュール514は、表示パラメータ設定モジュール512が設定した表示パラメータに基づき、レンダリングなどの表示制御処理をして画像データを生成し、画像表示装置40を駆動するための様々な既知のソフトウェア構成要素を含む。すなわち、グラフィックモジュール514は、表示パラメータ設定モジュール512が設定した表示パラメータに基づき、表示される画像の、種類、配置(位置座標、角度)、サイズ、表示距離(3Dの場合。)、視覚的効果(例えば、輝度、透明度、彩度、コントラスト、又は他の視覚特性)、を変更するための様々な既知のソフトウェア構成要素を含んでいてもよい。グラフィックモジュール514は、画像の種類(表示パラメータの例の1つ。)、画像の位置座標(表示パラメータの例の1つ。)、画像の角度(X方向を軸としたピッチング角、Y方向を軸としたヨーレート角、Z方向を軸としたローリング角などであり、表示パラメータの例の1つ。)、画像のサイズ(表示パラメータの例の1つ。)、画像の色(色相、彩度、明度などで設定される表示パラメータの例の1つ。)で観察者に視認されるように画像データを生成し、表示器50を駆動し得る。
Refer to FIG. 3 again. The
光源駆動モジュール(不図示)は、光源ユニット24を駆動することを実行するための様々な既知のソフトウェア構成要素を含む。光源駆動モジュール516は、設定された表示パラメータに基づき、光源ユニット24を駆動し得る。 A light source driving module (not shown) includes various known software components for performing driving the light source unit 24 . The light source driving module 516 may drive the light source units 24 based on the set display parameters.
アクチュエータ駆動モジュール(不図示)は、第1アクチュエータ28及び/又は第2アクチュエータ29を駆動することを実行するための様々な既知のソフトウェア構成要素を含む。前記アクチュエータ駆動モジュールは、設定された表示パラメータに基づき、第1アクチュエータ28及び第2アクチュエータ29を駆動し得る。
Actuator drive module (not shown) includes various known software components for performing the actuation of
ずれ量算出モジュール522は、姿勢検出部415から取得する姿勢変動情報に基づいて、車両1の姿勢(角度のずれ量)を算出する。例えば、ずれ量算出モジュール522は、姿勢検出部415が検出した角速度を積分演算することによって、車両1のピッチ軸周りの角度(ピッチ角)を算出する。これにより、図1に示すY軸(ピッチ軸)を中心とした回転方向における車両1のずれ量(角度)を算出することができる。なお、本実施形態では、ピッチ角度を算出するが、ヨー角度又はロール角度を算出してもよい。例えば、X軸、Y軸及びZ軸周りの角度を全て算出してもよい。
The deviation
補正量算出モジュール524は、車両1の姿勢(角度のずれ量)に応じて、第1の虚像V1(複数の第1の画像要素G10)の表示位置の補正量を算出する。具体的には、補正量算出モジュール524は、ずれ量算出モジュール522が算出した角度(ピッチ角)のずれ量を画素数に換算して、ずれている分の画素数を元に戻すような補正量を決定する。例えば、補正量算出モジュール524は、ピッチ角のずれ量を元に戻すような補正量を決定する。補正量算出モジュール524は、算出した補正量をグラフィックモジュール514に出力する。なお、本実施形態では、ピッチ軸方向の補正量を算出するが、ヨー軸方向及びロール方向の補正量を算出してもよい。ロール角については、角度のまま、ロール角のずれ量を元に戻すような補正量を決定する。
The correction
上述の処理プロセスの動作は、汎用プロセッサ又は特定用途向けチップなどの情報処理装置の1つ以上の機能モジュールを実行させることにより実施することができる。これらのモジュール、これらのモジュールの組み合わせ、及び/又はそれらの機能を代替えし得る公知のハードウェアとの組み合わせは全て、本発明の保護の範囲内に含まれる。 The operations of the processing processes described above may be implemented by executing one or more functional modules of an information processing device such as a general purpose processor or an application specific chip. These modules, combinations of these modules, and/or combinations with known hardware that can replace their functions are all within the scope of protection of the present invention.
車両用表示システム10の機能ブロックは、任意選択的に、説明される様々な実施形態の原理を実行するために、ハードウェア、ソフトウェア、又はハードウェア及びソフトウェアの組み合わせによって実行される。図7で説明する機能ブロックが、説明される実施形態の原理を実施するために、任意選択的に、組み合わされ、又は1つの機能ブロックを2以上のサブブロックに分離されてもいいことは、当業者に理解されるだろう。したがって、本明細書における説明は、本明細書で説明されている機能ブロックのあらゆる可能な組み合わせ若しくは分割を、任意選択的に支持する。
The functional blocks of
1 :車両
2 :被投影部
10 :車両用表示システム
20 :ヘッドアップディスプレイ装置(HUD装置)
21 :光出射窓
22 :筐体
24 :光源ユニット
28 :第1アクチュエータ
29 :第2アクチュエータ
30 :表示制御装置
31 :I/Oインタフェース
33 :プロセッサ
35 :表示制御処理回路
37 :メモリ
40 :画像表示装置
50 :表示器
51 :光変調素子
52 :光学レイヤ
60 :光源ユニット
80 :リレー光学系
90 :虚像光学系
200 :アイボックス
205 :中心
401 :車両ECU
403 :道路情報データベース
405 :自車位置検出部
407 :操作検出部
409 :目位置検出部
411 :車外センサ
413 :明るさ検出部
415 :姿勢検出部
417 :携帯情報端末
419 :外部通信機器
502 :姿勢変化検知モジュール
504 :姿勢変化推定モジュール
506 :姿勢変化予測モジュール
512 :表示パラメータ設定モジュール
514 :グラフィックモジュール
516 :光源駆動モジュール
522 :ずれ量算出モジュール
524 :補正量算出モジュール
700 :目位置
700L :左目
700R :右目
D10 :ギャップ
FU :知覚画像
G10 :第1の画像要素
G20 :第2の画像要素
K :表示光
K10 :表示光(左目用表示光)
K20 :表示光(右目用表示光)
V1 :第1の虚像
V10 :左視点画像
V20 :右視点画像
VS :虚像表示領域
Reference Signs List 1: vehicle 2: projection target 10: vehicle display system 20: head-up display device (HUD device)
21 : Light exit window 22 : Housing 24 : Light source unit 28 : First actuator 29 : Second actuator 30 : Display control device 31 : I/O interface 33 : Processor 35 : Display control processing circuit 37 : Memory 40 : Image display Device 50 : Display 51 : Light modulation element 52 : Optical layer 60 : Light source unit 80 : Relay optical system 90 : Virtual image optical system 200 : Eyebox 205 : Center 401 : Vehicle ECU
403 : road information database 405 : vehicle position detection unit 407 : operation detection unit 409 : eye position detection unit 411 : vehicle exterior sensor 413 : brightness detection unit 415 : attitude detection unit 417 : mobile information terminal 419 : external communication device 502 : Posture change detection module 504: Posture change estimation module 506: Posture change prediction module 512: Display parameter setting module 514: Graphic module 516: Light source drive module 522: Deviation amount calculation module 524: Correction amount calculation module 700:
K20: display light (display light for right eye)
V1: first virtual image V10: left viewpoint image V20: right viewpoint image VS: virtual image display area
Claims (11)
1つ又は複数のプロセッサを有し、
前記プロセッサは、
それらの間にギャップを有する複数の第1の画像要素を含み、遠近法を表現する第1の虚像を表示し、
前記複数の第1の画像要素は、同種の情報を表し、所定の視認性より高く、
移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、前記第1の虚像に含まれる、前記所定の視認性より高い前記第1の画像要素の間の前記ギャップの数を減らす、又は前記ギャップを短くする第1の表示制御処理を実行する、
ことを特徴とする表示制御装置。 In a display control device that controls a head-up display device that displays an image superimposed on the foreground in front of a moving object,
having one or more processors,
The processor
displaying a first virtual image representing perspective, comprising a plurality of first image elements having gaps therebetween;
the plurality of first image elements represent the same type of information and have higher than predetermined visibility;
number of the gaps between the first image elements higher than the predetermined visibility included in the first virtual image when it is detected, estimated, or predicted that the posture variation of the moving body satisfies a predetermined condition; or perform a first display control process that shortens the gap;
A display control device characterized by:
前記第1の表示制御処理後の前記所定の視認性より高い前記第1の画像要素の少なくとも1つを大きくする、
請求項1に記載の表示制御装置。 The processor
enlarging at least one of the first image elements higher than the predetermined visibility after the first display control process;
The display control device according to claim 1.
前記第1の表示制御処理後の前記所定の視認性より高い前記第1の画像要素の少なくとも1つが、前記第1の表示制御処理前の前記第1の虚像の全体に亘るように大きくするように前記第1の表示制御処理を実行する、
請求項1に記載の表示制御装置。 The processor
At least one of the first image elements having visibility higher than the predetermined visibility after the first display control process is enlarged so as to cover the entire first virtual image before the first display control process. executing the first display control process in
The display control device according to claim 1.
前記移動体の前記姿勢変動が前記所定条件を満たすと検知、推定、又は予測される場合、前記第1の虚像の表示距離を短くする第2の表示制御処理をさらに実行する、
請求項1乃至3の何れか1項に記載の表示制御装置。 The processor
Further executing a second display control process for shortening a display distance of the first virtual image when it is detected, estimated, or predicted that the posture variation of the moving body satisfies the predetermined condition;
The display control device according to any one of claims 1 to 3.
時間経過に伴い、前記第1の虚像の表示距離を連続的又は段階的に短くする、
請求項4に記載の表示制御装置。 The processor, in the second display control process,
Continuously or stepwise shortening the display distance of the first virtual image as time elapses;
The display control device according to claim 4.
請求項1乃至5の何れか1項に記載の表示制御装置。 The processor executes the first display control process of adhering the plurality of image elements such that the gaps between the plurality of first image elements before the first display control process are eliminated.
The display control device according to any one of claims 1 to 5.
請求項1に記載の表示制御装置。 The processor executes the first display control process of displaying a second image element arranged to fill the gap between the plurality of first image elements before the first display control process. do,
The display control device according to claim 1.
請求項7に記載の表示制御装置。 The second image element has higher visibility than the first image element,
The display control device according to claim 7.
請求項1乃至8の何れか1項に記載の表示制御装置。 The processor executes the first display control process to make a part of the plurality of first image elements before the first display control process lower than the predetermined visibility or to hide them.
The display control device according to any one of claims 1 to 8.
表示光を出射する光変調素子と、
光変調素子からの表示光を被投影部にむけるリレー光学系と、を備える、
ことを特徴とするヘッドアップディスプレイ装置。 A display control device according to any one of claims 1 to 9;
a light modulation element that emits display light;
a relay optical system for directing the display light from the light modulation element to the projection target,
A head-up display device characterized by:
それらの間にギャップを有する複数の第1の画像要素を含み、遠近法を表現する第1の虚像を表示することと、
前記複数の第1の画像要素は、同種の情報を表し、所定の視認性より高く、
移動体の姿勢変動が所定条件を満たすと検知、推定、又は予測される場合、前記第1の虚像に含まれる、前記所定の視認性より高い前記第1の画像要素の間の前記ギャップの数を減らす、又は前記ギャップを短くする第1の表示制御処理を実行することと、を含む、
ことを特徴とする表示制御方法。
In a display control device method for controlling a head-up display device that displays an image superimposed on the foreground in front of a moving object,
displaying a first virtual image representing perspective, comprising a plurality of first image elements having gaps therebetween;
the plurality of first image elements represent the same type of information and have higher than predetermined visibility;
number of the gaps between the first image elements higher than the predetermined visibility included in the first virtual image when it is detected, estimated, or predicted that the posture variation of the moving body satisfies a predetermined condition; or performing a first display control process that shortens the gap;
A display control method characterized by:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021154938A JP2023046339A (en) | 2021-09-23 | 2021-09-23 | Display control device, head-up display apparatus and display control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021154938A JP2023046339A (en) | 2021-09-23 | 2021-09-23 | Display control device, head-up display apparatus and display control method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2023046339A true JP2023046339A (en) | 2023-04-04 |
Family
ID=85778028
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021154938A Pending JP2023046339A (en) | 2021-09-23 | 2021-09-23 | Display control device, head-up display apparatus and display control method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2023046339A (en) |
-
2021
- 2021-09-23 JP JP2021154938A patent/JP2023046339A/en active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2914002B1 (en) | Virtual see-through instrument cluster with live video | |
| KR102270483B1 (en) | Method and apparatus for minimizing error due to surrounding environment of three dimentional head-up display | |
| US11999234B2 (en) | Method for operating a field-of-vision display device for a motor vehicle | |
| WO2020009219A1 (en) | Head-up display device | |
| JP6494877B2 (en) | Display control apparatus and display control method | |
| CN105988220B (en) | Method and control device for operating an autostereoscopic field display for a vehicle | |
| JP7126115B2 (en) | DISPLAY SYSTEM, MOVING OBJECT AND DESIGN METHOD | |
| US9684166B2 (en) | Motor vehicle and display of a three-dimensional graphical object | |
| WO2022230995A1 (en) | Display control device, head-up display device, and display control method | |
| JP4929768B2 (en) | Visual information presentation device and visual information presentation method | |
| WO2023048213A1 (en) | Display control device, head-up display device, and display control method | |
| JP7397152B2 (en) | A 3D augmented reality head-up display that places images on the ground and realizes augmented reality from the driver's perspective. | |
| JP7533131B2 (en) | Display control device, head-up display device, and display control method | |
| JP2023046339A (en) | Display control device, head-up display apparatus and display control method | |
| JP2023065856A (en) | Display control device, head-up display device, and display control method | |
| WO2023054307A1 (en) | Display control device, head-up display device, and display control method | |
| CN111971197B (en) | Display control device and head-up display apparatus | |
| WO2023032956A1 (en) | Display control device, head-up display device, and display control method | |
| JP2023034899A (en) | Display control device, head-up display device, and display control method | |
| WO2023003045A1 (en) | Display control device, head-up display device, and display control method | |
| JP7574607B2 (en) | Display control device, head-up display device, and image display control method | |
| JP2024017509A (en) | Display control device, head-up display device and display control method | |
| JP2024025398A (en) | Display control device, head-up display device, and display control method | |
| JP2024017504A (en) | Display control device, head-up display device and display control method | |
| JP2023093913A (en) | Display control device, head-up display device, and display control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240712 |