以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
なお、説明は以下の順序で行うものとする。
1.内視鏡手術システムの基本構成
1−1.内視鏡
1−2.カートに搭載される各種の装置
1−3.医療用支持アーム装置の概略構成
1−4.光源装置
1−5.カメラヘッド及びCCU
2.医療用支持アーム装置の具体的構成例
2−1.支持アーム装置の外観
2−2.能動関節部の構成例
2−3.受動形態変更機構
2−3−1.受動スライド機構
2−3−2.受動関節部
3.制御装置の構成例
3−1.全身協調制御部
3−1−1.仮想力算出処理
3−1−2.実在力算出処理
3−2.理想関節制御部
3−3.アーム部のマスプロパティ情報の適用
4.支持アーム装置の制御方法の例
5.変形例
6.まとめ
<<1.内視鏡手術システムの基本構成>>
まず、本開示に係る医療用支持アーム装置(以下、単に「支持アーム装置」ともいう。)を適用可能な内視鏡手術システムの基本構成について説明する。
図1は、本開示に係る支持アーム装置が適用され得る内視鏡手術システム5000の概略的な構成の一例を示す図である。図1では、術者(医師)5067が、内視鏡手術システム5000を用いて、患者ベッド5069上の患者5071に手術を行っている様子が図示されている。図示するように、内視鏡手術システム5000は、内視鏡5001と、その他の術具5017と、内視鏡5001を支持する支持アーム装置5027と、内視鏡下手術のための各種の装置が搭載されたカート5037とから構成される。
内視鏡手術では、腹壁を切って開腹する代わりに、トロッカ5025a〜5025dと呼ばれる筒状の開孔器具が腹壁に複数穿刺される。そして、トロッカ5025a〜5025dから、内視鏡5001の鏡筒5003や、その他の術具5017が患者5071の体腔内に挿入される。図示する例では、その他の術具5017として、気腹チューブ5019、エネルギー処置具5021及び鉗子5023が、患者5071の体腔内に挿入されている。エネルギー処置具5021は、高周波電流や超音波振動により、組織の切開及び剥離、又は血管の封止等を行う処置具である。ただし、図示する術具5017はあくまで一例であり、術具5017としては、例えば攝子、レトラクタ等、一般的に内視鏡下手術において用いられる各種の術具が用いられてよい。
内視鏡5001によって撮影された患者5071の体腔内の術部の画像が、表示装置5041に表示される。術者5067は、表示装置5041に表示された術部の画像をリアルタイムで見ながら、エネルギー処置具5021や鉗子5023を用いて、例えば患部を切除する等の処置を行う。なお、図示は省略しているが、気腹チューブ5019、エネルギー処置具5021及び鉗子5023は、手術中に、術者5067又は助手等によって支持される。
<1−1.内視鏡>
内視鏡5001は、先端から所定の長さの領域が患者5071の体腔内に挿入される鏡筒5003と、鏡筒5003の基端に接続されるカメラヘッド5005と、から構成される。図示する例では、硬性の鏡筒5003を有するいわゆる硬性鏡として構成される内視鏡5001を図示しているが、内視鏡5001は、軟性の鏡筒5003を有するいわゆる軟性鏡として構成されてもよい。
鏡筒5003の先端には、対物レンズが嵌め込まれた開口部が設けられている。内視鏡5001には光源装置5043が接続されており、当該光源装置5043によって生成された光が、鏡筒5003の内部に延設されるライトガイドによって当該鏡筒5003の先端まで導光され、対物レンズを介して患者5071の体腔内の観察対象に向かって照射される。なお、内視鏡5001は、直視鏡であってもよいし、斜視鏡又は側視鏡であってもよい。
カメラヘッド5005の内部には光学系及び撮像素子が設けられており、観察対象からの反射光(観察光)は当該光学系によって当該撮像素子に集光される。当該撮像素子によって観察光が光電変換され、観察光に対応する電気信号、すなわち観察像に対応する画像信号が生成される。当該画像信号は、RAWデータとしてカメラコントロールユニット(CCU:Camera Control Unit)5039に送信される。なお、カメラヘッド5005には、その光学系を適宜駆動させることにより、倍率及び焦点距離を調整する機能が搭載される。
なお、例えば立体視(3D表示)等に対応するために、カメラヘッド5005には撮像素子が複数設けられてもよい。この場合、鏡筒5003の内部には、当該複数の撮像素子のそれぞれに観察光を導光するために、リレー光学系が複数系統設けられる。
<1−2.カートに搭載される各種の装置>
CCU5039は、CPU(Central Processing Unit)やGPU(Graphics Processing Unit)等によって構成され、内視鏡5001及び表示装置5041の動作を統括的に制御する。具体的には、CCU5039は、カメラヘッド5005から受け取った画像信号に対して、例えば現像処理(デモザイク処理)等の、当該画像信号に基づく画像を表示するための各種の画像処理を施す。CCU5039は、当該画像処理を施した画像信号を表示装置5041に提供する。また、CCU5039は、カメラヘッド5005に対して制御信号を送信し、その駆動を制御する。当該制御信号には、倍率や焦点距離等、撮像条件に関する情報が含まれ得る。
表示装置5041は、CCU5039からの制御により、当該CCU5039によって画像処理が施された画像信号に基づく画像を表示する。内視鏡5001が例えば4K(水平画素数3840×垂直画素数2160)又は8K(水平画素数7680×垂直画素数4320)等の高解像度の撮影に対応したものである場合、及び/又は3D表示に対応したものである場合には、表示装置5041としては、それぞれに対応して、高解像度の表示が可能なもの、及び/又は3D表示可能なものが用いられ得る。4K又は8K等の高解像度の撮影に対応したものである場合、表示装置5041として55インチ以上のサイズのものを用いることで一層の没入感が得られる。また、用途に応じて、解像度、サイズが異なる複数の表示装置5041が設けられてもよい。
光源装置5043は、例えばLED(light emitting diode)等の光源から構成され、術部を撮影する際の照射光を内視鏡5001に供給する。
アーム制御装置5045は、例えばCPU等のプロセッサによって構成され、所定のプログラムに従って動作することにより、所定の制御方式に従って支持アーム装置5027のアーム部5031の駆動を制御する。
入力装置5047は、内視鏡手術システム5000に対する入力インタフェースである。ユーザは、入力装置5047を介して、内視鏡手術システム5000に対して各種の情報の入力や指示入力を行うことができる。例えば、ユーザは、入力装置5047を介して、患者の身体情報や、手術の術式についての情報等、手術に関する各種の情報を入力する。また、例えば、ユーザは、入力装置5047を介して、アーム部5031を駆動させる旨の指示や、内視鏡5001による撮像条件(照射光の種類、倍率及び焦点距離等)を変更する旨の指示、エネルギー処置具5021を駆動させる旨の指示等を入力する。
入力装置5047の種類は限定されず、入力装置5047は各種の公知の入力装置であってよい。入力装置5047としては、例えば、マウス、キーボード、タッチパネル、スイッチ、フットスイッチ5057及び/又はレバー等が適用され得る。入力装置5047としてタッチパネルが用いられる場合には、当該タッチパネルは表示装置5041の表示面上に設けられてもよい。
あるいは、入力装置5047は、例えばメガネ型のウェアラブルデバイスやHMD(Head Mounted Display)等の、ユーザによって装着されるデバイスであり、これらのデバイスによって検出されるユーザのジェスチャや視線に応じて各種の入力が行われる。また、入力装置5047は、ユーザの動きを検出可能なカメラを含み、当該カメラによって撮像された映像から検出されるユーザのジェスチャや視線に応じて各種の入力が行われる。さらに、入力装置5047は、ユーザの声を収音可能なマイクロフォンを含み、当該マイクロフォンを介して音声によって各種の入力が行われる。このように、入力装置5047が非接触で各種の情報を入力可能に構成されることにより、特に清潔域に属するユーザ(例えば術者5067)が、不潔域に属する機器を非接触で操作することが可能となる。また、ユーザは、所持している術具から手を離すことなく機器を操作することが可能となるため、ユーザの利便性が向上する。
処置具制御装置5049は、組織の焼灼、切開又は血管の封止等のためのエネルギー処置具5021の駆動を制御する。気腹装置5051は、内視鏡5001による視野の確保及び術者の作業空間の確保の目的で、患者5071の体腔を膨らめるために、気腹チューブ5019を介して当該体腔内にガスを送り込む。レコーダ5053は、手術に関する各種の情報を記録可能な装置である。プリンタ5055は、手術に関する各種の情報を、テキスト、画像又はグラフ等各種の形式で印刷可能な装置である。
<1−3.医療用支持アーム装置の概略構成>
支持アーム装置5027は、ベース部5029から延伸するアーム部5031を備える。図示する例では、アーム部5031は、関節部5033a,5033b,5033c,及びリンク5035a,5035bから構成されており、アーム制御装置5045からの制御指令により駆動される。アーム部5031によって内視鏡5001が支持され、その位置及び姿勢が制御される。これにより、内視鏡5001の安定的な位置の固定が実現され得る。
支持アーム装置5027は、基台であるベース部5029と、ベース部5029から延伸するアーム部5031と、を備える。図示する例では、アーム部5031は、複数の関節部5033a,5033b,5033cと、関節部5033bによって連結される複数のリンク5035a,5035bと、から構成されているが、図1では、簡単のため、アーム部5031の構成を簡略化して図示している。実際には、アーム部5031が所望の自由度を有するように、関節部5033a〜5033c及びリンク5035a,5035bの形状、数及び配置、並びに関節部5033a〜5033cの回転軸の方向等が適宜設定され得る。例えば、アーム部5031は、好適に、6自由度以上の自由度を有するように構成され得る。これにより、アーム部5031の可動範囲内において内視鏡5001を自由に移動させることが可能になるため、所望の方向から内視鏡5001の鏡筒5003を患者5071の体腔内に挿入することが可能になる。
関節部5033a〜5033cにはアクチュエータが設けられており、関節部5033a〜5033cは当該アクチュエータの駆動により所定の回転軸まわりに回転可能に構成されている。当該アクチュエータの駆動がアーム制御装置5045によって制御されることにより、各関節部5033a〜5033cの回転角度が制御され、アーム部5031の駆動が制御される。これにより、内視鏡5001の位置及び姿勢の制御が実現され得る。この際、アーム制御装置5045は、力制御又は位置制御等、各種の公知の制御方式によってアーム部5031の駆動を制御することができる。
例えば、術者5067が、入力装置5047(フットスイッチ5057を含む)を介して適宜操作入力を行うことにより、当該操作入力に応じてアーム制御装置5045によってアーム部5031の駆動が適宜制御され、内視鏡5001の位置及び姿勢が制御されてよい。当該制御により、アーム部5031の先端の内視鏡5001を任意の位置から任意の位置まで移動させた後、その移動後の位置で固定的に支持することができる。なお、アーム部5031は、いわゆるマスタースレイブ方式で操作されてもよい。この場合、アーム部5031は、手術室から離れた場所に設置される入力装置5047を介してユーザによって遠隔操作され得る。
また、力制御が適用される場合には、アーム制御装置5045は、ユーザからの外力を受け、その外力にならってスムーズにアーム部5031が移動するように、各関節部5033a〜5033cのアクチュエータを駆動させる、いわゆるパワーアシスト制御を行ってもよい。これにより、ユーザが直接アーム部5031に触れながらアーム部5031を移動させる際に、比較的軽い力で当該アーム部5031を移動させることができる。従って、より直感的に、より簡易な操作で内視鏡5001を移動させることが可能となり、ユーザの利便性を向上させることができる。
ここで、一般的に、内視鏡下手術では、スコピストと呼ばれる医師によって内視鏡5001が支持されていた。これに対して、支持アーム装置5027を用いることにより、人手によらずに内視鏡5001の位置をより確実に固定することが可能になるため、術部の画像を安定的に得ることができ、手術を円滑に行うことが可能になる。
なお、アーム制御装置5045は必ずしもカート5037に設けられなくてもよい。また、アーム制御装置5045は必ずしも1つの装置でなくてもよい。例えば、アーム制御装置5045は、支持アーム装置5027のアーム部5031の各関節部5033a〜5033cにそれぞれ設けられてもよく、複数のアーム制御装置5045が互いに協働することにより、アーム部5031の駆動制御が実現されてもよい。
<1−4.光源装置>
光源装置5043は、内視鏡5001に術部を撮影する際の照射光を供給する。光源装置5043は、例えばLED、レーザ光源又はこれらの組み合わせによって構成される白色光源から構成される。このとき、RGBレーザ光源の組み合わせにより白色光源が構成される場合には、各色(各波長)の出力強度及び出力タイミングを高精度に制御することができるため、光源装置5043において撮像画像のホワイトバランスの調整を行うことができる。また、この場合には、RGBレーザ光源それぞれからのレーザ光を時分割で観察対象に照射し、その照射タイミングに同期してカメラヘッド5005の撮像素子の駆動を制御することにより、RGBそれぞれに対応した画像を時分割で撮像することも可能である。当該方法によれば、当該撮像素子にカラーフィルタを設けなくても、カラー画像を得ることができる。
また、光源装置5043は、出力する光の強度を所定の時間ごとに変更するようにその駆動が制御されてもよい。その光の強度の変更のタイミングに同期してカメラヘッド5005の撮像素子の駆動を制御して時分割で画像を取得し、その画像を合成することにより、いわゆる黒つぶれ及び白とびのない高ダイナミックレンジの画像を生成することができる。
また、光源装置5043は、特殊光観察に対応した所定の波長帯域の光を供給可能に構成されてもよい。特殊光観察では、例えば、体組織における光の吸収の波長依存性を利用して、通常の観察時における照射光(すなわち、白色光)に比べて狭帯域の光を照射することにより、粘膜表層の血管等の所定の組織を高コントラストで撮影する、いわゆる狭帯域光観察(Narrow Band Imaging)が行われる。あるいは、特殊光観察では、励起光を照射することにより発生する蛍光により画像を得る蛍光観察が行われてもよい。蛍光観察では、体組織に励起光を照射し当該体組織からの蛍光を観察するもの(自家蛍光観察)、又はインドシアニングリーン(ICG)等の試薬を体組織に局注するとともに当該体組織にその試薬の蛍光波長に対応した励起光を照射し蛍光像を得るもの等が行われ得る。光源装置5043は、このような特殊光観察に対応した狭帯域光及び/又は励起光を供給可能に構成され得る。
<1−5.カメラヘッド及びCCU>
図2を参照して、内視鏡5001のカメラヘッド5005及びCCU5039の機能についてより詳細に説明する。図2は、図1に示すカメラヘッド5005及びCCU5039の機能構成の一例を示すブロック図である。
図2を参照すると、カメラヘッド5005は、その機能として、レンズユニット5007と、撮像部5009と、駆動部5011と、通信部5013と、カメラヘッド制御部5015と、を有する。また、CCU5039は、その機能として、通信部5059と、画像処理部5061と、制御部5063と、を有する。カメラヘッド5005とCCU5039とは、伝送ケーブル5065によって双方向に通信可能に接続されている。
まず、カメラヘッド5005の機能構成について説明する。レンズユニット5007は、鏡筒5003との接続部に設けられる光学系である。鏡筒5003の先端から取り込まれた観察光は、カメラヘッド5005まで導光され、当該レンズユニット5007に入射する。レンズユニット5007は、ズームレンズ及びフォーカスレンズを含む複数のレンズが組み合わされて構成される。レンズユニット5007は、撮像部5009の撮像素子の受光面上に観察光を集光するように、その光学特性が調整されている。また、ズームレンズ及びフォーカスレンズは、撮像画像の倍率及び焦点の調整のため、その光軸上の位置が移動可能に構成される。
撮像部5009は撮像素子によって構成され、レンズユニット5007の後段に配置される。レンズユニット5007を通過した観察光は、当該撮像素子の受光面に集光され、光電変換によって、観察像に対応した画像信号が生成される。撮像部5009によって生成された画像信号は、通信部5013に提供される。
撮像部5009を構成する撮像素子としては、例えばCMOS(Complementary Metal Oxide Semiconductor)タイプのイメージセンサであり、Bayer配列を有するカラー撮影可能なものが用いられる。なお、当該撮像素子としては、例えば4K以上の高解像度の画像の撮影に対応可能なものが用いられてもよい。術部の画像が高解像度で得られることにより、術者5067は、当該術部の様子をより詳細に把握することができ、手術をより円滑に進行することが可能となる。
また、撮像部5009を構成する撮像素子は、3D表示に対応する右目用及び左目用の画像信号をそれぞれ取得するための1対の撮像素子を有するように構成される。3D表示が行われることにより、術者5067は術部における生体組織の奥行きをより正確に把握することが可能になる。なお、撮像部5009が多板式で構成される場合には、各撮像素子に対応して、レンズユニット5007も複数系統設けられる。
また、撮像部5009は、必ずしもカメラヘッド5005に設けられなくてもよい。例えば、撮像部5009は、鏡筒5003の内部に、対物レンズの直後に設けられてもよい。
駆動部5011は、アクチュエータによって構成され、カメラヘッド制御部5015からの制御により、レンズユニット5007のズームレンズ及びフォーカスレンズを光軸に沿って所定の距離だけ移動させる。これにより、撮像部5009による撮像画像の倍率及び焦点が適宜調整され得る。
通信部5013は、CCU5039との間で各種の情報を送受信するための通信装置によって構成される。通信部5013は、撮像部5009から得た画像信号をRAWデータとして伝送ケーブル5065を介してCCU5039に送信する。この際、術部の撮像画像を低レイテンシで表示するために、当該画像信号は光通信によって送信されることが好ましい。手術の際には、術者5067が撮像画像によって患部の状態を観察しながら手術を行うため、より安全で確実な手術のためには、術部の動画像が可能な限りリアルタイムに表示されることが求められるからである。光通信が行われる場合には、通信部5013には、電気信号を光信号に変換する光電変換モジュールが設けられる。画像信号は当該光電変換モジュールによって光信号に変換された後、伝送ケーブル5065を介してCCU5039に送信される。
また、通信部5013は、CCU5039から、カメラヘッド5005の駆動を制御するための制御信号を受信する。当該制御信号には、例えば、撮像画像のフレームレートを指定する旨の情報、撮像時の露出値を指定する旨の情報、並びに/又は撮像画像の倍率及び焦点を指定する旨の情報等、撮像条件に関する情報が含まれる。通信部5013は、受信した制御信号をカメラヘッド制御部5015に提供する。なお、CCU5039からの制御信号も、光通信によって伝送されてもよい。この場合、通信部5013には、光信号を電気信号に変換する光電変換モジュールが設けられ、制御信号は当該光電変換モジュールによって電気信号に変換された後、カメラヘッド制御部5015に提供される。
なお、上記のフレームレートや露出値、倍率、焦点等の撮像条件は、取得された画像信号に基づいてCCU5039の制御部5063によって自動的に設定される。つまり、いわゆるAE(Auto Exposure)機能、AF(Auto Focus)機能及びAWB(Auto White Balance)機能が内視鏡5001に搭載される。
カメラヘッド制御部5015は、通信部5013を介して受信したCCU5039からの制御信号に基づいて、カメラヘッド5005の駆動を制御する。例えば、カメラヘッド制御部5015は、撮像画像のフレームレートを指定する旨の情報及び/又は撮像時の露光を指定する旨の情報に基づいて、撮像部5009の撮像素子の駆動を制御する。また、例えば、カメラヘッド制御部5015は、撮像画像の倍率及び焦点を指定する旨の情報に基づいて、駆動部5011を介してレンズユニット5007のズームレンズ及びフォーカスレンズを適宜移動させる。カメラヘッド制御部5015は、さらに、鏡筒5003やカメラヘッド5005を識別するための情報を記憶する機能を備えてもよい。
なお、レンズユニット5007や撮像部5009等の構成を、気密性及び防水性が高い密閉構造内に配置することで、カメラヘッド5005について、オートクレーブ滅菌処理に対する耐性を持たせることができる。
次に、CCU5039の機能構成について説明する。通信部5059は、カメラヘッド5005との間で各種の情報を送受信するための通信装置によって構成される。通信部5059は、カメラヘッド5005から、伝送ケーブル5065を介して送信される画像信号を受信する。この際、上記のように、当該画像信号は好適に光通信によって送信され得る。この場合、光通信に対応して、通信部5059には、光信号を電気信号に変換する光電変換モジュールが設けられる。通信部5059は、電気信号に変換した画像信号を画像処理部5061に提供する。
また、通信部5059は、カメラヘッド5005に対して、カメラヘッド5005の駆動を制御するための制御信号を送信する。当該制御信号も光通信によって送信されてよい。
画像処理部5061は、カメラヘッド5005から送信されたRAWデータである画像信号に対して各種の画像処理を施す。当該画像処理としては、例えば現像処理、高画質化処理(帯域強調処理、超解像処理、NR(Noise reduction)処理及び/又は手ブレ補正処理等)、並びに/又は拡大処理(電子ズーム処理)等、各種の公知の信号処理が含まれる。また、画像処理部5061は、AE、AF及びAWBを行うための、画像信号に対する検波処理を行う。
画像処理部5061は、CPUやGPU等のプロセッサによって構成され、当該プロセッサが所定のプログラムに従って動作することにより、上述した画像処理や検波処理が行われ得る。なお、画像処理部5061が複数のGPUによって構成される場合には、画像処理部5061は、画像信号に係る情報を適宜分割し、これら複数のGPUによって並列的に画像処理を行う。
制御部5063は、内視鏡5001による術部の撮像、及びその撮像画像の表示に関する各種の制御を行う。例えば、制御部5063は、カメラヘッド5005の駆動を制御するための制御信号を生成する。この際、撮像条件がユーザによって入力されている場合には、制御部5063は、当該ユーザによる入力に基づいて制御信号を生成する。あるいは、内視鏡5001にAE機能、AF機能及びAWB機能が搭載されている場合には、制御部5063は、画像処理部5061による検波処理の結果に応じて、最適な露出値、焦点距離及びホワイトバランスを適宜算出し、制御信号を生成する。
また、制御部5063は、画像処理部5061によって画像処理が施された画像信号に基づいて、術部の画像を表示装置5041に表示させる。この際、制御部5063は、各種の画像認識技術を用いて術部画像内における各種の物体を認識する。例えば、制御部5063は、術部画像に含まれる物体のエッジの形状や色等を検出することにより、鉗子等の術具、特定の生体部位、出血、エネルギー処置具5021使用時のミスト等を認識することができる。制御部5063は、表示装置5041に術部の画像を表示させる際に、その認識結果を用いて、各種の手術支援情報を当該術部の画像に重畳表示させる。手術支援情報が重畳表示され、術者5067に提示されることにより、より安全かつ確実に手術を進めることが可能になる。
カメラヘッド5005及びCCU5039を接続する伝送ケーブル5065は、電気信号の通信に対応した電気信号ケーブル、光通信に対応した光ファイバ、又はこれらの複合ケーブルである。
ここで、図示する例では、伝送ケーブル5065を用いて有線で通信が行われていたが、カメラヘッド5005とCCU5039との間の通信は無線で行われてもよい。両者の間の通信が無線で行われる場合には、伝送ケーブル5065を手術室内に敷設する必要がなくなるため、手術室内における医療スタッフの移動が当該伝送ケーブル5065によって妨げられる事態が解消され得る。
以上、本開示に係る医療用支持アーム装置が適用され得る内視鏡手術システム5000の一例について説明した。なお、ここでは、一例として内視鏡手術システム5000について説明したが、本開示に係る技術が適用され得るシステムはかかる例に限定されない。例えば、本開示に係る医療用支持アーム装置は、検査用軟性内視鏡システムや顕微鏡手術システムに適用されてもよい。
<<2.医療用支持アーム装置の具体的構成例>>
次に、本開示の実施の形態に係る医療用支持アーム装置の具体的構成例について詳細に説明する。以下に説明する支持アーム装置は、アーム部の先端に内視鏡を支持する支持アーム装置として構成された例であるが、本実施形態は係る例に限定されない。
<2−1.支持アーム装置の外観>
まず、図3を参照して、本実施形態に係る支持アーム装置400の概略構成について説明する。図3は、本実施形態に係る支持アーム装置400の外観を示す概略図である。
本実施形態に係る支持アーム装置400は、ベース部410及びアーム部420を備える。ベース部410は支持アーム装置400の基台であり、ベース部410からアーム部420が延伸される。また、図3には図示しないが、ベース部410内には、支持アーム装置400を統合的に制御する制御部が設けられてもよく、アーム部420の駆動が当該制御部によって制御されてもよい。当該制御部は、例えばCPUやDSP等の各種の信号処理回路によって構成される。
アーム部420は、複数の能動関節部421a〜421fと、複数のリンク422a〜422fと、アーム部420の先端に設けられた先端ユニットとしての内視鏡装置423とを有する。
リンク422a〜422fは略棒状の部材である。リンク422aの一端が能動関節部421aを介してベース部410と連結され、リンク422aの他端が能動関節部421bを介してリンク422bの一端と連結され、さらに、リンク422bの他端が能動関節部421cを介してリンク422cの一端と連結される。リンク422cの他端は受動スライド機構100を介してリンク422dに連結され、さらに、リンク422dの他端は受動関節部200を介してリンク422eの一端と連結される。リンク422eの他端は能動関節部421d,421eを介してリンク422fの一端と連結される。内視鏡装置423は、アーム部420の先端、すなわち、リンク422fの他端に、能動関節部421fを介して連結される。このように、ベース部410を支点として、複数のリンク422a〜422fの端同士が、能動関節部421a〜421f、受動スライド機構100及び受動関節部200によって互いに連結されることにより、ベース部410から延伸されるアーム形状が構成される。
かかるアーム部420のそれぞれの能動関節部421a〜421fに設けられたアクチュエータが駆動制御されることにより、内視鏡装置423の位置及び姿勢が制御される。本実施形態において、内視鏡装置423は、その先端が施術部位である患者の体腔内に進入して施術部位の一部領域を撮影する。ただし、アーム部420の先端に設けられる先端ユニットは内視鏡装置423に限定されず、アーム部420の先端には先端ユニットとして各種の医療用器具が接続されてよい。このように、本実施形態に係る支持アーム装置400は、医療用器具を備えた医療用支持アーム装置として構成される。
ここで、以下では、図3に示すように座標軸を定義して支持アーム装置400の説明を行う。また、座標軸に合わせて、上下方向、前後方向、左右方向を定義する。すなわち、床面に設置されているベース部410に対する上下方向をz軸方向及び上下方向と定義する。また、z軸と互いに直交する方向であって、ベース部410からアーム部420が延伸されている方向(すなわち、ベース部410に対して内視鏡装置423が位置している方向)をy軸方向及び前後方向と定義する。さらに、y軸及びz軸と互いに直交する方向をx軸方向及び左右方向と定義する。
能動関節部421a〜421fはリンク同士を互いに回動可能に連結する。能動関節部421a〜421fはアクチュエータを有し、当該アクチュエータの駆動により所定の回転軸に対して回転駆動される回転機構を有する。各能動関節部421a〜421fにおける回転駆動をそれぞれ制御することにより、例えばアーム部420を伸ばしたり、縮めたり(折り畳んだり)といった、アーム部420の駆動を制御することができる。ここで、能動関節部421a〜421fは、例えば公知の全身協調制御及び理想関節制御によってその駆動が制御され得る。上述したように、能動関節部421a〜421fは回転機構を有するため、以下の説明において、能動関節部421a〜421fの駆動制御とは、具体的には、能動関節部421a〜421fの回転角度及び/又は発生トルク(能動関節部421a〜421fが発生させるトルク)が制御されることを意味する。
受動スライド機構100は、受動形態変更機構の一態様であり、リンク422cとリンク422dとを所定方向に沿って互いに進退動可能に連結する。例えば受動スライド機構100は、リンク422cとリンク422dとを互いに直動可能に連結してもよい。ただし、リンク422cとリンク422dとの進退運動は直線運動に限られず、円弧状を成す方向への進退運動であってもよい。受動スライド機構100は、例えばユーザによって進退動の操作が行われ、リンク422cの一端側の能動関節部421cと受動関節部200との間の距離を可変とする。これにより、アーム部420の全体の形態が変化し得る。受動スライド機構100の構成の詳細は後述する。
受動関節部200は、受動形態変更機構の一態様であり、リンク422dとリンク422eとを互いに回動可能に連結する。受動関節部200は、例えばユーザによって回動の操作が行われ、リンク422dとリンク422eとの成す角度を可変とする。これにより、アーム部420の全体の形態が変化し得る。受動関節部200の構成の詳細は後述する。
なお、本明細書において、「アーム部の姿勢」とは、一つ又は複数のリンクを挟んで隣り合う能動関節部同士の間の距離が一定の状態で、制御部による能動関節部421a〜421fに設けられたアクチュエータの駆動制御によって変化し得るアーム部の状態をいう。また、「アーム部の形態」とは、受動形態変更機構が操作されることに伴って、リンクを挟んで隣り合う能動関節部同士の間の距離や、隣り合う能動関節部の間をつなぐリンク同士の成す角度が変わることで変化し得るアーム部の状態をいう。
本実施形態に係る支持アーム装置400は、6つの能動関節部421a〜421fを有し、アーム部420の駆動に関して6自由度が実現されている。つまり、支持アーム装置400の駆動制御は制御部による6つの能動関節部421a〜421fの駆動制御により実現される一方、受動スライド機構100及び受動関節部200は、制御部による駆動制御の対象とはなっていない。
具体的には、図3に示すように、能動関節部421a,421d,421fは、接続されている各リンク422a,422eの長軸方向及び接続されている内視鏡装置423の撮影方向を回転軸方向とするように設けられている。能動関節部421b,421c,421eは、接続されている各リンク422a〜422c,422e,422f及び内視鏡装置423の連結角度をy−z平面(y軸とz軸とで規定される平面)内において変更する方向であるx軸方向を回転軸方向とするように設けられている。このように、本実施形態においては、能動関節部421a,421d,421fは、いわゆるヨーイングを行う機能を有し、能動関節部421b,421c,421eは、いわゆるピッチングを行う機能を有する。
このようなアーム部420の構成を有することにより、本実施形態に係る支持アーム装置400ではアーム部420の駆動に対して6自由度が実現されるため、アーム部420の可動範囲内において内視鏡装置423を自由に移動させることができる。図3では、内視鏡装置423の移動可能範囲の一例として半球を図示している。半球の中心点RCM(遠隔運動中心)が内視鏡装置423によって撮影される施術部位の撮影中心であるとすれば、内視鏡装置423の撮影中心を半球の中心点に固定した状態で、内視鏡装置423を半球の球面上で移動させることにより、施術部位を様々な角度から撮影することができる。
図4は、本実施形態に係る支持アーム装置400の構成を示す模式図である。支持アーム装置400のアーム部420は、根元側がベース部410に連結されて、図示しない内視鏡装置が支持される先端側へと延伸する。先端側に配置された3つの能動関節部421d,421e,421fは、主として内視鏡装置の3自由度の動作を確保して撮像方向を変化させる機能を有する。また、根元側に配置された3つの能動関節部421a,421b,421cは、主として内視鏡装置の位置を変化させる機能を有する。つまり、本実施形態に係る支持アーム装置400において、根元側の能動関節部421a,421b,421cの回転駆動により、先端側に支持された内視鏡装置のおおよその位置が決定されつつ、先端側の能動関節部421d,421e,421fの回転駆動により、内視鏡装置の撮像方向が決定される。
また、支持アーム装置400のアーム部420の根元部分、例えば、リンク422aとベース部410との連結部分には、アーム部420の全体の水平方向に対する傾きを検出するための姿勢センサ450が設けられてもよい。姿勢センサ450により検出されるアーム部420の全体の傾きは、アーム部420に作用する重力の算出に用いられ、制御部は、算出した重力を用いて、重力を打ち消すための制御(以下、「重力補償制御」ともいう。)を実行することができる。かかる姿勢センサ450としては、例えばジャイロセンサ及び加速度センサのうちの少なくとも1つを用いたセンサが適用され得る。
受動形態変更機構としての受動スライド機構100及び受動関節部200は、能動関節部421cと能動関節部421dとの間に設けられている。つまり、受動形態変更機構は、アーム部420の先端側に配置された少なくとも3つの能動関節部421d〜421fよりも根元側に配置されている。このため、受動スライド機構100及び受動関節部200は、先端側の3つの能動関節部421d〜421fによる内視鏡装置の撮像方向の制御に大きな影響を与えることなく、アーム部420の可動範囲を変化させることができる。ただし、受動形態変更機構の配置位置は上記の例に限られない。受動形態変更機構がどの位置に配置されていてもアーム部420の形態を変化させることができる。
ここで、受動形態変更機構が設けられない場合、想定される内視鏡装置の最大可動範囲に合わせてアーム部420の自由度(能動関節部の数)やアーム部420の各リンクの長さを設計すると、小さい自由度又は可動範囲で済む手術手技においては、アーム部420自身が過大となる。その結果、術者の視野やワーキングスペースが阻害されたり、手術室内の他の機材の配置が妨げられたりする原因となり得る。また、アーム部420の自由度が増えると、アクチュエータの数も増えることになり、コストやアーム部420の重量が増加する原因となり得る。さらに、各リンクの長さを長くすることによって根元側の能動関節部421aに設けられるアクチュエータに求められる出力が増大し、コストが増加する原因ともなり得る。
これに対して、本実施形態に係る支持アーム装置400は、受動スライド機構100及び受動関節部200を有することによって、アーム部420の一部の能動関節部同士の間の距離、及び一部のリンク同士の角度のうちの少なくとも一方を変化させることができる。このため、支持アーム装置400は、手術手技の目的や内容に応じてアーム部420の形態を変化させて、適切な可動範囲を確保することができる。したがって、術者の視野やワーキングスペースが必要以上に阻害されたり、手術室内の他の機材の配置が必要以上に妨げられたりすることを抑制することができる。また、支持アーム装置400は、自由度(能動関節部の数)を必要以上に増やすことなく適切な可動範囲を確保することができるために、コストの増加を抑制することができる。
<2−2.能動関節部の構成例>
ここで、図5を参照して、能動関節部421a〜421fの構成について簡単に説明する。なお、ここでは、能動関節部421a〜421fの構成のうち、能動関節部421a〜421fの回転駆動に主に関係する構成であるアクチュエータ430の構成について説明する。能動関節部421a〜421fは、リンク422a〜422f及び内視鏡装置423を接続又は支持するための支持部材等、アーム部420の駆動に必要な各種の構成を有する。ここまでの説明及び以下の説明において、アーム部420の関節部の駆動とは、能動関節部421a〜421fにおけるアクチュエータ430の駆動を意味していてもよい。
図5は、能動関節部421a〜421fに搭載されるアクチュエータ430の一構成例を示す断面図である。図5では、本実施形態に係るアクチュエータ430を、回転軸を通る平面で切断した場合における断面図を図示している。
図5を参照すると、アクチュエータ430は、モータ424と、モータドライバ425と、減速機426と、エンコーダ427と、トルクセンサ428と、から構成される。アクチュエータ430は、例えば力制御に対応するアクチュエータである。アクチュエータ430では、モータ424の回転が減速機426によって所定の減速比で減速され、出力軸を介して後段の他の部材に伝達されることにより、当該他の部材が駆動されることとなる。
モータ424は、回転駆動力を生み出す駆動機構である。モータ424は、モータドライバ425からの制御により、制御部からのトルク指令値に対応するトルクを発生するように駆動される。モータ424としては、例えばブラシレスモータが用いられる。ただし、本実施形態はかかる例に限定されず、モータ424としては各種の公知の種類のモータが用いられてよい。
モータドライバ425は、モータ424に電流を供給することによりモータ424を回転駆動させるドライバ回路(ドライバIC(Integrated Circuit))であり、モータ424に供給する電流量を調整することにより、モータ424の回転数を制御することができる。モータドライバ425は、制御部からのトルク指令値τに対応する電流をモータ424に供給することにより、当該モータ424を駆動させる。
また、モータドライバ425は、モータ424に供給する電流量を調整することにより、アクチュエータ430の回転運動における粘性抵抗係数を調整することができる。これにより、アクチュエータ430における回転運動、すなわち、能動関節部421a〜421fにおける回転運動に対して、所定の抵抗を負荷することが可能となる。例えば、能動関節部421a〜421fを、外部から加えられる力に対して回転しやすい状態(すなわち、アーム部420を手動で移動しやすい状態)にすることもできるし、逆に、外部から加えられる力に対して回転し難い状態(すなわち、アーム部420を手動で移動し難い状態)にすることもできる。
モータ424の回転軸(駆動軸)には、減速機426が連結される。減速機426は、連結されたモータ424の回転軸の回転速度(すなわち、入力軸の回転速度)を、所定の減速比で減速させて出力軸に伝達する。本実施形態では、減速機426の構成は特定のものに限定されず、減速機426としては各種の公知の種類の減速機が用いられてよい。ただし、減速機426としては、例えばハーモニックドライブ(登録商標)等の、高精度に減速比が設定可能なものが用いられることが好ましい。また、減速機426の減速比は、アクチュエータ430の用途に応じて適宜設定され得る。例えば、本実施形態のように、アクチュエータ430が支持アーム装置400の関節部421a〜421fに適用される場合であれば、1:100程度の減速比を有する減速機426が好適に用いられ得る。
エンコーダ427は、入力軸の回転角度(すなわち、モータ424の回転軸の回転角度)を検出する。エンコーダ427によって検出された入力軸の回転数と、減速機426の減速比と、に基づいて、関節部421a〜421fの回転角度、回転角速度及び回転角加速度等の情報を得ることができる。エンコーダ427としては、例えば磁気式エンコーダ、光学式エンコーダ等の各種の公知のロータリエンコーダが用いられてよい。なお、図示する例では、アクチュエータ430の入力軸にのみエンコーダ427が設けられているが、減速機426よりも後段に、アクチュエータ430の出力軸の回転角度等を検出するためのエンコーダが更に設けられてもよい。
トルクセンサ428は、アクチュエータ430の出力軸に接続され、アクチュエータ430に作用するトルクを検出する。トルクセンサ428は、アクチュエータ430によって出力されるトルク(発生トルク)を検出する。また、トルクセンサ428は、アクチュエータ430に外部から加えられる外トルクも検出することができる。
以上、図5を参照して、能動関節部421a〜421fに設けられるアクチュエータ430の構成について説明した。ここで、本実施形態では、アーム部420の動作が力制御によって制御される。当該力制御においては、支持アーム装置400では、各アクチュエータ430に設けられたエンコーダ427及びトルクセンサ428によって、各能動関節部421a〜421fの回転角度、及び能動各関節部421a〜421fに作用するトルクがそれぞれ検出される。このとき、トルクセンサ428によって検出される各能動関節部421a〜421fに作用するトルクには、アーム部420及び/又は内視鏡装置423に作用する力も含まれ得る。
また、エンコーダ427によって検出された回転角度、及びトルクセンサ428によって検出されたトルク値に基づいて、現在のアーム部420の状態(位置、速度等)が取得され得る。支持アーム装置400では、取得されたアーム部420の状態(アーム状態)に基づいて、アーム部420が所望の運動目的を実行するために必要な、各能動関節部421a〜421fに設けられたアクチュエータ430が発生すべきトルクが算出され、当該トルクを制御値として各能動関節部421a〜421fのアクチュエータ430が駆動されることになる。
なお、図5に示す構成は、あくまで、アクチュエータ430の一構成例を示すものであり、本実施形態はかかる例に限定されない。アクチュエータ430としては、一般的に力制御によってその動作が制御される各種の装置において用いられている、各種の公知のアクチュエータを用いることができる。例えば、アクチュエータ430としては、本願出願人による先行特許出願である特開2009−269102号公報や特開2011−209099号公報等に記載のものを好適に用いることができる。
本実施形態に係る支持アーム装置400において、アクチュエータ430、及びアクチュエータを構成する各部品の構成は上記の構成に限定されず、他の構成であってもよい。
<2−3.受動形態変更機構>
次に、受動形態変更機構の構成例について説明する。上述のとおり、受動形態変更機構は、例えば能動関節部同士の間の距離を変えたり、あるいは、リンク同士の成す角度を変えたりすることで、アーム部420の形態を変化させ得る。これにより、手術手技の目的や内容に応じてアーム部420の可動範囲が適切に確保され得る。以下、適宜図面を参照しながら、受動形態変更機構の一例としての受動スライド機構100及び受動関節部200の一構成例を説明する。
(2−3−1.受動スライド機構)
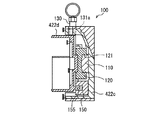
図6〜図9は、受動スライド機構100の一構成例を示す説明図である。図6は、受動スライド機構100をリンク422c,422dの長軸方向に直交する方向から見た一側面図である。図7は、図6に示す受動スライド機構100を上方側から見た図である。図8は、図6に示す受動スライド機構100のI−I断面を矢印方向に見た図であり、図9は、図6に示す受動スライド機構100のII−II断面を矢印方向に見た図である。
本実施形態に係る支持アーム装置400の受動スライド機構100は、2つの能動関節部421c,421dの間に配置された2つのリンク422cとリンク422dとを互いに進退動可能に連結する。リンク422c及びリンク422dは、ともに長軸方向に直交する断面の形状が略U字状を成す(図9を参照。)。一方のリンク422cの幅は他方のリンク422dの幅よりも大きく、断面U字状の一方のリンク422cの内部に他方のリンク422dを配置可能になっている。断面U字状の一方のリンク422cの底部の内面には、リンク422cの長軸方向に沿ってレール部110が設けられている。例えば、レール部110は、リンク422cの底面に形成されたボス部111及び固定用ボルト113を利用してリンク422cに固定されていてもよく、リンク422cと一体成形されていてもよい。
断面U字状の他方のリンク422dの底部の外面には、スライダ120が設けられている。スライダ120は、リンク422dの長軸方向に沿った溝部121を有する。当該溝部121は、一方のリンク422cに設けられたレール部110に対して、摺動自在に嵌合可能になっている。一方のリンク422cに設けられたレール部110、及び他方のリンク422dに設けられたスライダ120の溝部121は、それぞれ断面U字状の深さ方向に沿って延在する面に、対応する凹凸形状を有する。例えば、スライダ120の溝部121は、レール部110の端部からレール部110の延在方向に沿ってスライドさせて嵌合し得る。これにより、2つのリンク422b,422cを脱着可能な機構となっている。また、スライダ120がレール部110に嵌合した状態において、スライダ120がレール部110から脱離しづらくなっている。
スライダ120は、固定用ボルト125を利用してリンク422dに固定されていてもよく、リンク422dと一体成形されていてもよい。スライダ120は、例えば、他方のリンク422dの端部に設けられてもよい。溝部121がレール部110にガイドされつつスライダ120がレール部110の延在方向に移動することにより、一方のリンク422cと他方のリンク422dとの相対的な直動運動が可能になっている。
本実施形態において、受動スライド機構100は、複数段階で一方のリンク422cと他方のリンク422dとの位置を固定可能になっている。つまり、受動スライド機構100は、あらかじめ複数段階に設定されたスライド量(変位量)で2つのリンク422c,422dをスライド可能になっている。例えば、一方のリンク422cの端部のうち、断面U字状の一側面部には、位置決めピン130及び固定ネジ140が設けられている。位置決めピン130及び固定ネジ140は、それぞれリンク422cの側面部を貫通して断面U字状の内部に向けて先端部が進退可能になっている。また、他方のリンク422dの断面U字状の一側面部であって、一方のリンク422cのうちの位置決めピン130及び固定ネジ140が設けられた側面部に対向し得る側面部には、位置決めピン130の先端を受容する複数の位置決め穴131a,131b・・・と、固定ネジ140の先端を受容する図示しない複数の窪みとが設けられている。
ユーザは、選択したいずれかの位置決め穴131a,131b・・・に位置決めピン130の先端を挿入することにより2つのリンク422c,422dの合計の長さを設定する。例えば、図示しないコイルばねによりU字の内部に向けて位置決めピン130が付勢されて先端が位置決め穴131a,131b・・・内に進入可能にされる一方、ユーザが位置決めピン130を引っ張ることで先端を位置決め穴131a,131b・・・から抜くことができるように構成されてもよい。また、ユーザは、固定ネジ140を締め付けることによって固定ネジ140の先端を窪みに押し付けて、2つのリンク422c,422dを固定してもよい。
図10は、受動スライド機構100において、一方のリンク422cに対する他方のリンク422dのスライド量を変化させた状態を示している。図10において、位置決めピン130は、図6において位置決めピン130が挿入された位置決め穴131aの隣の位置決め穴131bに挿入されている。つまり、図10に示した状態における2つのリンク422c,422dの合計の長さが、図6に示した状態における2つのリンク422c,422dの合計の長さよりも短くなっている。このようにして、ユーザは、2つのリンク422c,422dの合計の長さを伸縮させて、手術手技の内容又は目的に応じてアーム部420の形態を変えることができる。また、受動スライド機構100において、2つのリンク422c,422dが固定されるようになっていることから、支持アーム装置400の駆動制御中において、アーム部420の予期せぬ動きが防止され得る。
位置決め穴131a,131b・・・及び窪みの数は特に限定されない。ただし、本実施形態に係る支持アーム装置400は、制御部による能動関節部421a〜421fに設けられたアクチュエータ430の駆動制御に用いられる制御値が、受動スライド機構100によって選択されるアーム部420の形態に応じてあらかじめ設定された制御値の中から選択されるようになっている。したがって、設定可能なリンク422c,422dの合計の長さの数が多いほど、あらかじめ設定される制御値の数も増えることになるため、この点を考慮して適切な数の位置決め穴131a,131b・・・及び窪みを形成してもよい。例えば、位置決め穴131a,131b,131c及び窪みは、10cm間隔で3つずつ設けられてもよい(図10を参照。)。
位置決めピン130及び固定ネジ140の構成は、上記の例に限定されない。また、受動スライド機構100における2つのリンク422c,422dの位置決めを行う構成及び2つのリンク422c,422dを固定する構成についても、上記の例に限定されない。
また、受動スライド機構100は、2つのリンク422c,422dの相対的なスライド量(変位量)を検出するセンサ150を備えていてもよい。かかるセンサ150を備えることにより、ユーザにより選択された受動スライド機構100のスライド量が制御部により自動で検出されるようになる。これにより、例えば制御部は、センサ150により検出された受動スライド機構100の変位量に応じて、能動関節部421a〜421fの制御値を変更することができる。かかるセンサ150は、例えば非接触型の光学式のセンサであってもよい。
図9を参照して、センサ150として例えば透過型フォトインタラプタが用いられる場合を説明すると、断面U字状の一方のリンク422cの底面部内側にはセンサ150としての透過型フォトインタラプタが設けられている。また、断面U字状の他方のリンク422dの底面部の外側面には、位置検出用の突出部155が形成されている。かかる突出部155は、例えば位置決め穴131a,131b・・・の数と同一の数で形成されており、いずれかの位置決め穴131a,131b・・・に位置決めピン130が挿入される状態で、対応する突出部155が透過型フォトインタラプタ内に位置し得る。
位置決めピン130がいずれの位置決め穴131a,131b・・・にも挿入されていない状態では、透過型フォトインタラプタの受光部は発光部から発せられた光を受光する。一方、位置決めピン130がいずれかの位置決め穴131a,131b・・・に挿入された状態では、発光部から発せられた光は突出部155によって遮断されて、受光部により受光されない。このとき、例えば位置決めピン130がそれぞれの位置決め穴131a,131b・・・に挿入された状態でそれぞれ透過型フォトインタラプタ内に位置する突出部155の配置状態(面積又は位置等)を異ならせることで、制御部が受動スライド機構100のスライド量を検出可能に構成されてもよい。
センサ150は、透過型フォトインタラプタに限られず、反射型フォトインタラプタであってもよく、その他の種々のセンサ150であってもよい。また、本開示の技術において、センサ150は必須の構成要素ではなく、例えば受動スライド機構100のスライド量に応じてユーザが入力部に対して手動で入力操作を行うことにより、制御部が受動スライド機構100のスライド量の情報を取得するようにしてもよい。
なお、受動スライド機構100は、2つのリンク422c,422dを置き換えて構成されてもよい。つまり、図6に示した受動スライド機構100において、位置決めピン130が設けられるリンクが先端側のリンク422dであり、位置決め穴131a,131b・・・が設けられるリンクが根元側のリンク422cであってもよい。
(2−3−2.受動関節部)
図11〜図13は、受動関節部200の一構成例を示す説明図である。図11は、受動関節部200を、受動関節部200の回転軸Ax及びリンク422dの長軸方向に直交する方向から見た一側面図である。図12は、図11に示す受動関節部200を下方側から見た図であり、図13は、図11に示す受動関節部200のIII−III断面を矢印方向に見た図である。
本実施形態に係る支持アーム装置400の受動関節部200は、2つの能動関節部421c,421dの間に配置された2つのリンク422d,422eを互いに回動可能に連結する。上述のとおりリンク422dが断面U字状の形状を有する一方、リンク422eは略筒型の形状を有する。受動関節部200は、一方のリンク422dに取り付けられるベースプレート220と、軸受225を介してベースプレート220に対して回動可能に支持される可動部210とを有する。可動部210は、他方のリンク422eの一端部として構成される。回転軸Axは、リンク422dの長軸方向及びリンク422eの長軸方向のいずれにも直交する。このため、リンク422eの一端部に構成された可動部210は、リンク422eの長軸方向に対して直交する方向においてベースプレート220に支持される。これにより、2つのリンク422d,422eの相対回転が可能になっている。
ベースプレート220は、例えば固定用ボルト211を利用して一方のリンク422dに取り付けられる。つまり、図14に示すように、本実施形態において、受動関節部200は、ベースプレート220に対して他方のリンク422eの一端に構成された可動部210が回動可能に支持され、かかるベースプレート220及び可動部210が一体となって一方のリンク422dに対して脱着可能な機構を有している。一方のリンク422dは、ベースプレート220に対向する位置に開口部209を有する。
ベースプレート220にはエンコーダ250が設けられている。エンコーダ250は、リンク422dに設けられた開口部209内に位置する。ベースプレート220はエンコーダケースとしての機能を有し、ベースプレート220の内部に、エンコーダ250用の磁気ディスク(永久磁石)を支持する支持基板215が配置されている。支持基板215は可動部210と一体に回転可能に構成される。また、ベースプレート220における、支持基板215上の磁気ディスクと対向する位置には、磁気ディスクの相対的な回転による磁場の変化を検出する磁場検出素子255が設けられている。かかるエンコーダ250により、2つのリンク422d,422eの相対的な回転角度(変位量)が検出され得る。
本実施形態において、受動関節部200は、複数段階で一方のリンク422dと他方のリンク422eとの回転角度を設定可能になっている。つまり、受動関節部200は、あらかじめ複数段階に設定された回転角度(変位量)で2つのリンク422d,422eを回転可能になっている。例えば、一方のリンク422dに固定されるベースプレート220には、位置決めピン230及び固定ネジ240が設けられている。位置決めピン230は、例えば回転軸Axの延在方向に沿って支持基板215に向けて進退可能になっている。位置決めピン230は、リンク422dに設けられた開口部209内に配置される。固定ネジ240は、例えば回転軸Axに直交する径方向に沿って支持基板215に向けて進退可能になっている。
また、他方のリンク422eの一端部として構成された可動部210と一体に回転可能な支持基板215は、位置決めピン230の先端を受容する複数の位置決め穴231と、固定ネジ240の先端を受容する複数の切欠き241とが設けられている。ただし、図13においては、位置決め穴231及び切欠き241は1つのみ図示されている。位置決め穴231は、回転軸Axの延在方向に沿って支持基板215を貫通して設けられている。切欠き241は、支持基板215の外周面の一部を溝状に切り欠くことにより形成されている。切欠き241は、それぞれの位置決め穴231に対して位置決めピン230が進入し得る状態で、固定ネジ240の先端が進入可能な位置に設けられる。つまり、図示した受動関節部200の例では、複数の位置決め穴231の配置位置と、複数の切欠き241の配置位置とは、回転軸Axを中心として180度位相がずれている。
ユーザは、選択したいずれかの位置決め穴231に位置決めピン230の先端を挿入することにより2つのリンク422d,422eの成す角度を設定する。例えば、図示しないコイルばねにより位置決め穴231に向けて位置決めピン230が付勢されて先端が位置決め穴231内に進入可能にされる一方、ユーザが位置決めピン230を引っ張ることで先端を位置決め穴231から抜くことができるように構成されてもよい。また、ユーザは固定ネジ240を締め付けることによって固定ネジ240の先端を切欠き241内に押し付けて、2つのリンク422d,422eを固定する。このようにして、ユーザは、2つのリンク422d,422eの成す角度を変えて、手術手技の内容又は目的に応じてアーム部420の形態を変えることができる。また、受動関節部200において、2つのリンク422d,422eが固定されるようになっていることから、支持アーム装置400の駆動制御中において、アーム部420の予期せぬ動きが防止され得る。
位置決め穴231及び切欠き241の数は特に限定されない。ただし、本実施形態に係る支持アーム装置400は、制御部による能動関節部421a〜421fに設けられたアクチュエータ430の駆動制御に用いられる制御値が、受動関節部200によって選択されるアーム部420の形態に応じてあらかじめ設定された制御値の中から選択されるようになっている。したがって、設定可能なリンク422d,422eの回転角度の数が多いほど、あらかじめ設定される制御値の数も増えることになるため、この点を考慮して適切な数の位置決め穴231及び切欠き241を形成してもよい。例えば、位置決め穴231及び切欠き241は、22.5度間隔で6つずつ設けられてもよい。
位置決めピン230及び固定ネジ240の構成は、上記の例に限定されない。また、ベースプレート220と支持基板215との位置決めを行う構成、及びベースプレート220と支持基板215とを固定する構成についても、上記の例に限定されない。
また、受動関節部200は、2つのリンク422d,422eの相対的な回転角度(変位量)を検出するセンサとしてのエンコーダ250を備えている。かかるエンコーダ250を備えることにより、ユーザにより選択された受動関節部200の回転角度が制御部により自動で検出されるようになる。これにより、例えば制御部は、エンコーダ250により検出された受動関節部200の変位量に応じて、能動関節部421a〜421fの制御値を変更することができる。なお、受動関節部200の回転角度を検出するセンサは、エンコーダ250に限られない。また、本開示の技術においてエンコーダ250は必須の構成要素ではなく、例えば受動関節部200の回転角度に応じてユーザが入力部に対して手動で入力操作を行うことにより、制御部が受動関節部200の回転角度の情報を取得するようにしてもよい。
なお、受動関節部200において、2つのリンク422d,422eを置き換えて構成されてもよい。つまり、図11に示した受動関節部200において、ベースプレート220及び可動部210が設けられるリンクが根元側のリンク422dであり、ベースプレート220が固定されるリンクが先端側のリンク422eであってもよい。
このように、本実施形態に係る支持アーム装置400は、アーム部420の形態を変化し得る受動形態変更機構としての受動スライド機構100及び受動関節部200を備えている。したがって、例えば手術の開始前に支持アーム装置400を配置するときや、手術中に大きな視野展開が必要になるときなどにおいて、手術手技の内容又は目的に応じてアーム部420の可動範囲を適切に設定することができる。
また、受動スライド機構100においては、一方のリンク422cに設けられたレール部110から他方のリンク422dに設けられたスライダ120を脱離させることによって、一方のリンク422cと他方のリンク422dとを脱着することができる。さらに、受動関節部200においては、一方のリンク422dからベースプレート220を取り外すことによって、一方のリンク422dと他方のリンク422eとを脱着することができる。したがって、例えば、アーム部420のうち、受動スライド機構100あるいは受動関節部200よりも先端側の構成部分を、リンク長等が異なる他の構成部分と交換しつつコネクタ等を利用して電気的な接続を確保することによっても、アーム部420の形態を変えることができる。これにより、様々な手術手技の内容又は目的に適合し得る、より汎用的な医療用支持アーム装置400を得ることができる。
<<3.制御装置の構成例>>
ここまで、本実施形態に係る支持アーム装置400の構成について説明した。以下、本実施形態に係る支持アーム装置400におけるアーム部420の駆動制御、すなわち、能動関節部421a〜421fに設けられたアクチュエータ430の回転駆動を制御するための制御装置の構成例について説明する。
図15は、制御装置350を含む支持アーム装置400の全体構成例を示すブロック図である。制御装置350は、制御部351と記憶部357と入力部359とを備える。
制御部351は、例えばCPUやDSP等の各種の信号処理回路によって構成される。制御部351は、制御装置350を統合的に制御するとともに、支持アーム装置400におけるアーム部420の駆動を制御するための各種の演算を行う。具体的に、制御部351は、全身協調制御部353と理想関節制御部355とを有する。全身協調制御部353は、支持アーム装置400のアーム部420の能動関節部421a〜421fに設けられたアクチュエータ430を駆動制御するために、全身協調制御における各種の演算を行う。理想関節制御部355は、外乱の影響を補正することにより全身協調制御に対する理想的な応答を実現する理想関節制御における各種の演算を行う。記憶部357は、例えばRAM(Random Access Memory)やROM(Read Only Memory)等の記憶素子であってもよく、あるいは、半導体メモリ、ハードディスク、外付けの記憶装置であってよい。
入力部359は、ユーザが制御部351に対して支持アーム装置400の駆動制御に関する情報や命令等を入力するための入力インタフェースである。入力部359は、例えばレバー、ペダル等のユーザが操作する操作手段を有し、当該レバー、ペダル等の操作に応じて、アーム部420の各構成部材の位置や速度等が、瞬時的な運動目的として設定されてもよい。かかる入力部359は、例えばレバーやペダルの他、マウス、キーボード、タッチパネル、ボタン及びスイッチ等のユーザが操作する操作手段を有してもよい。
<3−1.全身協調制御部>
全身協調制御部353は、一般化逆動力学を用いた全身協調制御に関する各種の演算を行う。例えば、全身協調制御部353は、能動関節部421a〜421fに設けられたトルクセンサやエンコーダ等により検出された各能動関節部421a〜421fの回転角度や負荷されるトルクに基づいて、アーム部420の状態の情報を取得する。また、全身協調制御部353は、当該アーム部420の状態と、アーム部420の運動目的や拘束条件等に基づいて、操作空間におけるアーム部420の全身協調制御のための制御値を、一般化逆動力学を用いて算出する。なお、操作空間とは、例えばアーム部420に作用する力とアーム部420に発生する加速度との関係を記述するための空間である。
一般化逆動力学は、複数のリンクが複数の能動関節部によって連結されて構成される多リンク構造体(例えば本実施形態においては図3に示すアーム部420に相当する。)において、各種の操作空間(Operation Space)における様々な次元に関する運動目的を、各種の拘束条件を考慮しながら、複数の能動関節部に生じさせるトルクに変換する、多リンク構造体の全身協調制御における基本演算である。
操作空間は、支持アーム装置等のロボット装置の力制御における重要な概念である。操作空間は、多リンク構造体に作用する力と多リンク構造体の加速度との関係を記述するための空間である。多リンク構造体の駆動制御を位置制御ではなく力制御によって行う際に、多リンク構造体と環境との接し方を拘束条件として用いる場合に操作空間という概念が必要となる。操作空間は、例えば、多リンク構造体が属する空間である、関節空間、デカルト空間、運動量空間等である。
運動目的は、多リンク構造体の駆動制御における目標値を表すものである。運動目的としては、例えば、「撮像部の視点保持」(すなわち、内視鏡装置423の位置及び姿勢を一定に保つこと)や、「術者の視界確保」(すなわち、術者の視界にアーム部420及び内視鏡装置423を侵入させないこと)等が設定され得る。実際の制御においては、より具体的に、これらのタスクを達成するための多リンク構造体の位置、速度、加速度、力、インピーダンス等の目標値が設定され得る。
また、運動目的は、アーム部420に作用する重力を打ち消すようにそれぞれの能動関節部421a〜421fの発生トルクを制御する(重力補償制御)とともに、さらに外部から与えられた力の方向へのアーム部420の移動をアシストするように能動関節部421a〜421fの発生トルクを制御するパワーアシスト動作であってもよい。具体的には、パワーアシスト動作においては、アーム部420のそれぞれの能動関節部421a〜421fにおける重力による外トルクを打ち消す発生トルクを各能動関節部421a〜421fに生じさせるように各能動関節部421a〜421fに設けられたアクチュエータ430の駆動が制御されることで、アーム部420の位置及び姿勢が所定の状態で保持される。
この状態でさらに外部から(例えばユーザから)外トルクが加えられた場合に、与えられた外トルクと同じ方向の発生トルクを各能動関節部421a〜421fに生じさせるように各能動関節部421a〜421fに設けられたアクチュエータ430の駆動が制御される。このようなパワーアシスト動作を行うことにより、ユーザが手動でアーム部420を動かす場合に、ユーザはより小さい力でアーム部420を移動させることができる。このため、あたかも無重力下でアーム部420を動かしているような感覚をユーザに与えることができ、ユーザによるアーム部420の操作性が向上する。
拘束条件は、多リンク構造体の形状や構造、多リンク構造体の周囲の環境及びユーザによる設定等によって定められる、多リンク構造体の位置、速度、加速度、力等に関する拘束条件である。例えば、拘束条件には、発生力、優先度、非駆動関節の有無、垂直反力、摩擦錘、支持多角形等についての情報が含まれる。拘束条件は、運動目的に応じて設定され得る。例えば、運動目的が「撮像部の視点保持」であれば、その拘束条件として、アーム部420の先端位置(手先位置)及び先端姿勢(手先姿勢)が所定の状態で保持されるように、当該手先位置及び手先姿勢に対して幾何的な制限が課せられる。また、例えば、運動目的が「術者の視界確保」であれば、その拘束条件としては、アーム部420及び内視鏡装置423が、空間上に設定された所定の侵入禁止領域に侵入しないように、その移動範囲に対して制限が課せられる。当該侵入禁止領域としては、術者の視野領域となることが想定される領域が適宜設定される。
ここで、全身協調制御を実行する際に用いられる一般化逆動力学においては、数値計算上の安定性と実時間処理可能な演算効率とを両立するため、その演算アルゴリズムは、第1段階である仮想力決定プロセス(仮想力算出処理)と、第2段階である実在力変換プロセス(実在力算出処理)によって構成される。第1段階である仮想力算出処理では、各運動目的の達成に必要な、操作空間に作用する仮想的な力である仮想力を、運動目的の優先度と仮想力の最大値を考慮しながら決定する。第2段階である実在力算出処理では、非駆動関節、垂直反力、摩擦錘、支持多角形等に関する拘束を考慮しながら、上記で得られた仮想力を関節力、外力等の実際の多リンク構造体の構成で実現可能な実在力に変換する。以下、仮想力算出処理及び実在力算出処理について詳しく説明する。
(3−1−1.仮想力算出処理)
多リンク構造体の各関節部におけるある物理量によって構成されるベクトルを一般化変数qと呼ぶ(関節値q又は関節空間qとも呼称する)。操作空間xは、一般化変数qとヤコビアンJとを用いて、以下の数式(1)で定義される。
本実施形態に係る支持アーム装置400の構成であれば、例えば、上記数式(1)におけるxは、アーム部420のリンク422a〜422fの先端位置であり、qは、アーム部420の能動関節部421a〜421fにおける回転角度である。操作空間xに関する運動方程式は、下記数式(2)で記述される。
ここで、fは操作空間xに作用する力を表す。また、Λ−1は操作空間慣性逆行列、cは操作空間バイアス加速度と呼ばれるものであり、それぞれ下記数式(3)、(4)で表される。
なお、Hは関節空間慣性行列、τは関節値qに対応する関節力(例えば関節部511a〜511fにおける発生トルク)、bは重力、コリオリ力、遠心力を表す項である。
一般化逆動力学においては、運動目的に対応する操作空間xに関する位置、速度の目標値は、操作空間xの加速度として表現できることが知られている。このとき、上記数式(1)から、運動目的に応じて与えられた目標値である操作空間加速度を実現するために、操作空間xに作用するべき仮想力fvは、下記数式(5)のような一種の線形相補性問題(LCP:Linear Complementary Problem)を解くことによって得られる。
ここで、LiとUiはそれぞれ、fvの第i成分の負の下限値(−∞を含む)、fvの第i成分の正の上限値(+∞を含む)とする。上記LCPは、例えばIterative法、Pivot法、ロバスト加速度制御を応用する方法等を用いて解くことができる。
なお、操作空間慣性逆行列Λ−1、バイアス加速度cは、定義式である上記数式(3)、(4)の通り算出すると計算コストが大きい。従って、多リンク構造体の一般化力(関節力τ)から一般化加速度(関節加速度)を得る準動力学計算(FWD)を応用することにより、操作空間慣性逆行列Λ−1の算出処理をより高速に算出する方法が提案されている。具体的には、操作空間慣性逆行列Λ−1、バイアス加速度cは、順動力学演算FWDを用いることにより、関節空間q、関節力τ、重力g等の多リンク構造体に作用する力に関する情報から得ることができる。このように、操作空間に関する順動力学演算FWDを応用することにより、関節部の数Nに対してO(N)の計算量で操作空間慣性逆行列Λ−1を算出することができる。
ここで、運動目的に応じた目標値の設定例として、絶対値Fi以下の仮想力fviで操作空間加速度の目標値(xの2階微分に上付きバーを付して表す)を達成するための条件は、下記数式(6)で表現できる。
また、上述したように、操作空間xの位置、速度に関する目標値は、操作空間加速度の目標値として表すことができ、具体的には下記数式(7)で表現される(操作空間xの位置、速度の目標値を、x、xの1階微分に上付きバーを付して表す)。
その他、分解操作空間の考え方を用いることにより、他の操作空間の線形和で表される操作空間(運動量、デカルト相対座標、連動関節等)に関する目標値を設定することもできる。
(3−1−2.実在力算出処理)
一般化逆動力学の第2段階である実在力算出処理では、上記(3−1−1.仮想力算出処理)で得られた仮想力fvを、実在の関節力と外力で置換する処理を行う。仮想力による一般化力τv=Jv Tfvを関節部に生じる発生トルクτaと外力feとで実現するための条件は、下記数式(8)で表現される。
ここで、添え字aは駆動関節部の集合(駆動関節集合)を表し、添え字uは非駆動関節部の集合(非駆動関節集合)を表す。すなわち、上記数式(8)の上段は非駆動関節部による空間(非駆動関節空間)の力の釣り合いを表しており、下段は駆動関節部による空間(駆動関節空間)の力の釣合いを表している。Jvu、Jvaは、それぞれ、仮想力fvが作用する操作空間に関するヤコビアンの非駆動関節成分及び駆動関節成分である。Jeu、Jeaは、外力feが作用する操作空間に関するヤコビアンの非駆動関節成分及び駆動関節成分である。Δfvは、仮想力fvのうち、実在力で実現不能な成分を表す。
上記数式(8)の上段は不定であり、例えば下記数式(9)に示すような2次計画問題(QP:Quadratic Programing Problem)を解くことで、fe及びΔfvを得ることができる。
ここで、εは上記数式(8)の上段の両辺の差であり、数式(8)の等式誤差を表す。ξはfeとΔfvとの連結ベクトルであり、変数ベクトルを表す。Q1及びQ2は、最小化の際の重みを表す正定値対称行列である。また、上記数式(9)の不等式拘束は、垂直反力、摩擦錐、外力の最大値、支持多角形等、設定された運動目的に対応する、外力に関する拘束条件を表現するのに用いられる。
例えば、矩形の支持多角形に関する不等式拘束は、下記数式(10)のように表現される。
ここで、zは接触面の法線方向を表し、x及びyはzに垂直な直交2接線方向を表す。(Fx,Fy,Fz)及び(Mx,My,Mz)は、接触点に作用する外力及び外力モーメントである。μt及びμrは、それぞれ並進、回転に関する摩擦係数である。(dx,dy)は支持多角形のサイズを表している。
例えば、上記数式(9)、(10)から、最小ノルム又は最小誤差の解fe、Δfvが求められる。上記数式(9)から得られたfe、Δfvを上記数式(8)の下段に代入することにより、運動目的を実現するために必要な関節力τa、すなわち各能動関節部421a〜421fにおける発生トルクτaを得ることができる。
実際には、設定された運動目的に対応する拘束条件が、上記数式(10)のように、適宜定式化されて設定される。
基底が固定され、非駆動関節が無い系の場合は、関節力のみで全ての仮想力を置換可能であり、上記数式(8)において、fe=0、Δfv=0とすることができる。この場合、上記数式(8)の下段から、関節力τaについて以下の数式(11)を得ることができる。
以上、一般化逆動力学を用いた全身協調制御の一例について説明した。上記のように、仮想力算出処理及び実在力算出処理を順に行うことにより、所望の運動目的を達成するための関節力τaを得ることができる。すなわち、逆に言えば、算出された関節力τaを能動関節部421a〜421fの駆動制御における制御値とすることにより、能動関節部421a〜421fが、所望の運動目的を達成するように駆動され得る。
なお、ここまで説明した一般化逆動力学を用いた全身協調制御について、特に、仮想力fvの導出過程や、上記LCPを解き仮想力fvを求める方法、QP問題の解法等の詳細については、例えば、本願出願人による先行特許出願である特開2009−95959号公報や特開2010−188471号公報等を参照することができる。
<3−2.理想関節制御部>
理想関節制御部355は、外乱の影響を補正することにより全身協調制御に対する理想的な応答を実現する理想関節制御における各種の演算を行う。以下、理想関節制御の一例について説明する。支持アーム装置400の各能動関節部421a〜421fに設けられるアクチュエータ430の運動は、下記数式(12)に示される二次遅れ系の運動方程式によってモデル化される。
ここで、qはアクチュエータ430の回転角度、qrefはアクチュエータ430の回転角度目標値、Iaはアクチュエータ430における慣性モーメント(イナーシャ)、τaはアクチュエータ430の発生トルク、τeは外部からアクチュエータ430に作用する外トルク、νaはアクチュエータ430における粘性抵抗係数である。上記数式(12)は、各能動関節部421a〜421fにおけるアクチュエータ430の運動を表す理論モデルである。
上記(3−1.全身協調制御部)で説明したように、一般化逆動力学を用いた演算により、タスクを実現するために各能動関節部421a〜421fのアクチュエータ430が発生すべきトルクτa(発生トルクτa)を算出することができる。従って、理想的には、各アクチュエータ430に対して算出された発生トルクτaを上記数式(12)に適用することにより、各アクチュエータ430において上記数式(12)に示す理論モデルに従った応答が実現する、すなわち、アーム部420において所望の動作が実現されるはずである。
しかし、実際には、様々な外乱の影響により、アクチュエータ430における実際の運動と上記数式(12)に示す理論モデルとの間には誤差(モデル化誤差)が生じる場合がある。モデル化誤差は、多リンク構造体(すなわち制御対象であるアーム部420)の重量、重心、慣性テンソル等のマスプロパティに起因するものと、アクチュエータ430内部における摩擦や慣性等に起因するものとに大別することができる。このうち、前者のマスプロパティに起因するモデル化誤差は、CAD(Computer Aided Design)データの高精度化や同定手法の適用によって、理論モデル構築時に比較的容易に低減することが可能である。
一方、後者のアクチュエータ430内部の摩擦や慣性等に起因するモデル化誤差は、例えば減速機における摩擦等、モデル化が困難な現象に起因している。従って、アクチュエータ430の運動を示す理論モデルを構築する際には、無視できないモデル化誤差が残留し得る。また、上記数式(12)におけるイナーシャIaや粘性抵抗係数νaの値と、実際のアクチュエータ430におけるこれらの値との間に誤差が生じている可能性もある。これらの、モデル化が困難なアクチュエータ430内部における摩擦や慣性等に起因する誤差は、アクチュエータ430の駆動制御において外乱となり得る。よって、このような外乱の影響により、実際には、アクチュエータ430の運動が、上記数式(12)に示す理論モデル通りには応答しない、すなわち、所望の動作が実現されない場合が生じる。
そこで、本実施形態では、アクチュエータ430にアクティブな制御系を付加することで、上記数式(12)に示す理論モデルに従った理想応答を行うように、アクチュエータ430の応答を補正する。なお、このように、支持アーム装置400のアクチュエータ430(すなわち能動関節部421a〜421f)が上記数式(12)に示すような理想的な応答を行うようにアクチュエータ430の駆動を制御することを、本実施形態では、理想関節制御と呼称する。
なお、理想関節制御の詳細については、例えば、本願出願人による先行特許出願である特開2009−269102号公報等を参照することができる。
<3−3.アーム部のマスプロパティ情報の適用>
ここで、以上説明した全身協調制御及び理想関節制御のうち、全身協調制御における演算式(例えば、数式(1),(3),(4),(8),(11))に含まれるヤコビアンJにはアーム部420の幾何情報が集約されている。このため、アーム部420の全体の重量、重心、慣性テンソル等のマスプロパティが変更される場合には、用いられるヤコビアンJの情報も変更されなければならない。本実施形態に係る支持アーム装置400は、受動形態変更機構によってアーム部420の形態が変更され得るものであるため、全身協調制御部353による全身協調制御時に用いられるヤコビアンJの情報(制御値)もアーム部420の形態に応じて変更される必要がある。一例として、受動形態変更機構の変位量に応じてアーム部420の重心がずれることについて説明する。
図16は、受動スライド機構100のスライド量の違いによるリンク422cとリンク422dとの合計長さの違いによって、アーム部420の重心がずれることを示す説明図である。受動スライド機構100によって2つのリンク422c,422dの合計長さが長くなることに伴い、重心はC1からC2の位置に変化することが分かる。また、図17は、受動関節部200の回転角度の違いによるリンク422dとリンク422eとの成す角度の違いによって、アーム部420の重心がずれることを示す説明図である。受動関節部200によって2つのリンク422d,422eの成す角度が変化することに伴い、重心はC3からC4の位置に変化することが分かる。
そこで、全身協調制御部353は、受動形態変更機構の変位量に基づいて全身協調制御を適切に実行可能に構成されている。具体的に、制御装置350の記憶部357には、受動形態変更機構の変位量に応じたマスプロパティ情報が記憶され、全身協調制御部353は、受動形態変更機構に設けられたセンサにより検出された変位量に対応するマスプロパティ情報に基づいて生成されるヤコビアンJの情報(制御値)を用いて全身協調制御を実行する。本実施形態に係る支持アーム装置400では、受動スライド機構100によって設定され得る2つのリンク422c,422dの合計長さは例えば3パターンに設定され得る。また、受動関節部200によって設定され得る2つのリンク422d,422eの成す角度は例えば6パターンに設定され得る。したがって、記憶部357には、例えば18パターン(3パターン×6パターン)のマスプロパティ情報が記憶され得る。
例えば、手術を開始する前に、ベース部410としての手術台等にアーム部420を設置するとき、あるいは、手術中に大きな視野展開が必要になるときにおいて、ユーザが受動形態変更機構の変位量を変更する。ユーザが受動形態変更機構を操作する際には、入力部359への入力操作が行われることにより、能動関節部421a〜421fに設けられたアクチュエータ430に対してブレーキがかけられ、一時的にアーム部420の姿勢変化が禁止されてもよい。受動形態変更機構の変位量に応じて用いるヤコビアンJの情報が変更される点以外は、上述した演算処理にしたがって、アーム部420の全身協調制御が行われ得る。また、理想関節制御についても、全身協調制御部353による演算結果にしたがって、上述した演算処理にしたがって行われ得る。
このように、全身協調制御部353が、受動形態変更機構の変位量に応じて選択されるマスプロパティ情報に基づいて生成される制御値を用いて全身協調制御を行うことにより、アーム部420の形態の変化による重心等のずれに応じて、重力補償制御の精度を高めることができる。その結果、アーム部420の根元側に配置される能動関節部421a〜421c等に作用する負荷が軽減し、当該能動関節部421a〜421c等に設けられるアクチュエータ430を小型化することができる。
また、支持アーム装置400が、アーム部420の根元部分に、アーム部420の全体の水平方向に対する傾きを検出するための姿勢センサ450を備える場合、全身協調制御部353は、かかる姿勢センサ450により検出されたアーム部420の傾きをさらに用いて全身協調制御を実行してもよい。アーム部420の全体の傾きの情報を用いることにより、アーム部420に作用する重力がより精度よく求められ、重力補償制御の精度をより高めることができる。例えば、アーム部420がベース部410としての手術台に搭載された場合における手術台の傾きに対応して、重力補償制御の精度の低下を抑制することができる。
<<4.支持アーム装置の制御方法の例>>
図18を参照して、本実施形態に係る支持アーム装置400のアーム部420の制御方法の処理手順について簡単に説明する。図18は、本実施形態に係る支持アーム装置400のアーム部420の制御方法の処理手順の一例を示すフローチャートである。
本実施形態に係る支持アーム装置400のアーム部420の制御方法では、まず、全身協調制御部353は、受動形態変更機構の変位量を取得する(ステップS101)。例えば、受動形態変更機構としての受動スライド機構100及び受動関節部200に設けられたセンサ150及びエンコーダ250により検出される情報に基づいて、受動スライド機構100のスライド量及び受動関節部200の回転角度が検出される。センサ150及びエンコーダ250による検出情報を用いる代わりに、ユーザが、受動スライド機構100のスライド量及び受動関節部200の回転角度の情報を、入力部359を介して入力してもよい。
次いで、全身協調制御部353は、取得した受動形態変更機構の変位量に基づいてアーム部420のマスプロパティ情報を設定する(ステップS103)。本実施形態に係る支持アーム装置400では、設定可能な受動スライド機構100のスライド量及び受動関節部200の回転角度が、それぞれあらかじめ複数段階で設定されている。このため、全身協調制御部353は、受動スライド機構100の各スライド量及び受動関節部200の各回転角度の組み合わせに対応してあらかじめ記憶部357に記憶されたマスプロパティ情報の中から、現在の受動スライド機構100のスライド量及び受動関節部200の回転角度の組み合わせに対応するマスプロパティ情報を選択する。これにより、アーム部420の形態に応じて、上記数式(1)で用いられるヤコビアンJが設定される。
次いで、全身協調制御部353は、能動関節部421a〜421fの状態に基づいて、アーム状態を取得する(ステップS105)。能動関節部421a〜421fの状態とは、例えば能動関節部421a〜421fの回転角度又は発生トルク等である。また、アーム状態とは、アーム部420の運動の状態のことであり、例えばアーム部420の位置、速度、加速度、力等である。全身協調制御部353は、各能動関節部421a〜421fに設けられたエンコーダ及びトルクセンサの検出信号に基づいて、各能動関節部421a〜421fの回転角度又は発生トルクを検出することができる。
次いで、全身協調制御部353は、演算条件を設定する(ステップS107)。例えば、全身協調制御部353は、ユーザによって指定された運動目的及び当該運動目的に対応する拘束条件が、当該運動目的を実行するようにアーム部420を駆動するための制御値(上述した発生トルクτa)を計算するための演算条件として、設定される。このとき設定される演算条件は、上記のステップS103において設定された現在のアーム部420のマスプロパティ情報が反映されている。
次いで、全身協調制御部353は、アーム状態及び演算条件に基づいて、一般化逆動力学を用いた全身協調制御についての演算を行い、各能動関節部421a〜421fにおける発生トルクτaを算出する(ステップS109)。ステップS109において、全身協調制御部353は、まず、ステップS107において設定された運動目的を実行するために必要な、アーム部420の各能動関節部421a〜421fに作用する仮想力を算出する。次いで、全身協調制御部353は、算出された仮想力に基づいて、ステップS107において設定された運動目的を実行するために必要な、アーム部420の各能動関節部421a〜421fに実際に作用する実在力を算出することにより、各能動関節部421a〜421fにおける発生トルクτaを算出する。
次いで、理想関節制御部355は、理想関節制御についての演算を行い、発生トルクτaからトルク指令値τを算出する(ステップS111)。具体的には、理想関節制御部355は、外乱によるトルク値である外乱推定値τdを算出し、当該外乱推定値τdを用いて、最終的にアーム部420の能動関節部421a〜421fに生じさせるトルクを表す指令値であるトルク指令値τを算出する。
次に、理想関節制御部355は、算出されたトルク指令値τに基づいて、図示しないアーム部420の能動関節部421a〜421fの駆動回路に対して駆動指令信号を出力する(ステップS113)。これにより、現在のアーム部420の形態(マスプロパティ)に応じて、ステップS107で設定された運動目的を実行し得るように、アーム部420が駆動されることとなる。
<<5.変形例>>
ここまで、本実施形態に係る支持アーム装置400の構成例及び制御方法の処理手順の例について説明した。以下、本実施形態に係る支持アーム装置400の変形例について説明する。
本実施形態に係る支持アーム装置400は、受動形態変更機構の変位量によってアーム部420の形態が変化し得るものであり、例えば受動スライド機構100のスライド量を最大にした場合等において、アーム部420の根元側に配置される能動関節部に作用する重力が大きくなる場合がある。また、受動スライド機構100又は受動関節部200自体の重量がアーム部420の重量に加わることによっても、アーム部420の根元側に配置される能動関節部に作用する重力が大きくなる場合がある。このような場合においても、当該能動関節部に設けられるアクチュエータ430への負荷の増大に対応すべくアクチュエータ430の大型化を防ぐには、当該能動関節部の少なくとも一部に、重力補償機構が設けられてもよい。重力補償機構は、能動関節部に作用するアーム部420の自重による負荷トルクを打ち消す方向のトルク(以下、「補償トルク」ともいう。)を当該能動関節部に与える。かかる重力補償機構は、例えば、バネによる弾性力を利用した重力補償機構であってもよい。
図19は、重力補償機構460,470を備えた支持アーム装置400の構成例を示している。図19に示した支持アーム装置400では、アーム部420の根元側に配置されて、主としてアーム部420の先端に支持される内視鏡装置等のおおよその位置を決定するための能動関節部421a〜421cのうちのピッチングを行う能動関節部421b,421cに重力補償機構460,470が設けられている。
重力補償機構460は、能動関節部421bの先端側に接続されるリンク422bに対して固定的に設けられる(すなわち、能動関節部421bの周りにリンク422bとともに回動する)掛止部461と、当該掛止部461と能動関節部421bの根元側に接続されるリンク422aとの間に張設されるバネ463とから構成される。同様に、重力補償機構470は、能動関節部421cの先端側に接続されるリンク422cに対して固定的に設けられる掛止部471と、当該掛止部471と能動関節部421cの根元側に接続されるリンク422bとの間に張設されるバネ473とから構成される。
かかる重力補償機構460,470によれば、それぞれ能動関節部421b,421cの周りに、リンク422b,422cから先端側の構成が、当該リンク422b,422cから先端側の構成に作用する重力の方向に回動した場合に、バネ463,473はその回動量に応じて伸長される。このとき、伸長されたバネ463,473の復元力は、リンク422b,422cから先端側の構成に対して、当該リンク422b,422cから先端側の構成を、能動関節部421b,421cの周りに重力方向への回動方向とは逆方向に回動させる方向に作用する。つまり、バネ463,473の復元力は、能動関節部421b,421cに作用するリンク422b,422cから先端側の構成の自重による負荷トルクを打ち消す方向の補償トルクを当該能動関節部421b,421cに与える。
バネ463,473は、例えば引っ張りばねである。その他、バネ463,473としては、例えば圧縮ばねや捻じりコイルばね等、種々の公知のバネが用いられてよい。あるいは、バネ463,473の代わりに、伸縮に応じて復元力を発生させる他の弾性体が用いられてもよい。
上記の重力補償機構460,470は、掛止部461,471及びバネ463,473によって構成される簡易な構成を有する。かかる構成により、重力補償機構460,470では、バネ463,473の復元力は、能動関節部421b,421cにおける回転角度が大きくなれば大きくなり、当該回転角度が小さくなれば小さくなる、という単純な正の相関を有する。つまり、バネ463,473の復元力は、能動関節部421b,421cにおける回転角度に対して単調に変化し得る。現在のアーム部420の姿勢において重力補償機構460,470によって生じている補償トルクの値は、能動関節部421b,421cの回転角度の情報に基づいて算出し得る。
そこで、全身協調制御部353は、重力補償機構460,470によって能動関節部421b,421cに与えられる補償トルクを加味して、アーム部420の自重による負荷トルクをキャンセルし得るように、当該能動関節部422b,422cに設けられるアクチュエータ430を駆動させることにより重力補償を行ってもよい。つまり、能動関節部421b,421cに作用するアーム部420の自重による負荷トルクから、重力補償機構460,470によって能動関節部421,421cに与えられる補償トルクを差し引いた、重力補償機構460,470では補償しきれない不足分を補償し得るように、全身協調制御部353はアクチュエータ430によって各能動関節部421b,421cにトルクを与えてもよい。
具体的に、全身協調制御部353は、上述したフローチャート(図18)におけるステップS109において発生トルクτaを算出する際に、アーム部420の自重による負荷トルクから補償トルクを差し引いたものを、アーム部420の自重による重力成分として発生トルクτaを算出する。これにより、重力補償機構460,470による補償トルクでは補償しきれなかった重力成分を補償しつつ、ステップS107で設定された運動目的を実行し得るような、能動関節部421a〜421fにおいて発生すべき発生トルクτaが算出される。このようにして、受動形態変更機構によるアーム部420の形態の変化に伴って、より根元側に近い能動関節部421b,421cに設けられるアクチュエータ430への負荷の増大が抑制され、アクチュエータ430の大型化を防ぐことができる。
<<6.まとめ>>
以上説明したように、本実施形態に係る支持アーム装置400は、アーム部420の形態を変更し得る受動形態変更機構を備えている。このため、手術手技の内容又は目的に応じてアーム部420の可動範囲を変更することができる。したがって、術者の視野やワーキングスペースが必要以上に阻害されたり、手術室内の他の機材の配置が必要以上に妨げられたりすることを抑制することができる。また、本実施形態に係る支持アーム装置400は、自由度(能動関節部の数)を必要以上に増やすことなく適切な可動範囲を確保することができるために、コストの増加を抑制することができる。
また、本実施形態に係る支持アーム装置400では、受動形態変更機構の変位量があらかじめ複数段階で設定可能になっているとともに、アーム部420が取り得る形態のパターンに応じて、あらかじめ複数のマスプロパティ情報が設定可能になっている。したがって、手術手技の開始時や、手術中に大きな視野展開が必要になるときにおいて、アーム部420の形態の変化に合わせてアーム部420の制御値を変更することができ、術中におけるアーム部420の駆動制御への負荷の増大を抑制することができる。
また、本実施形態に係る支持アーム装置400では、主として先端ユニットとしての内視鏡装置423の撮像方向を変化させる先端側の3つの能動関節部421d〜421fよりも根元側に受動形態変更機構が設けられている。したがって、先端ユニットの向きの制御に与える影響を少なくして、アーム部420の可動範囲を調節することができる。
また、本実施形態に係る支持アーム装置400では、受動形態変更機構によって、先端側の構成部分と根元側の構成部分とを切り離すことができる。このため、例えば先端側の構成部分を、異なるリンク長で構成された別の構成部分と交換することによって、支持アーム装置400の形態を変えることができ、支持アーム装置400の汎用性をより高めることができる。
また、本実施形態に係る支持アーム装置400において、アーム部420の根元側に配置される能動関節部421b,421cに重力補償機構460,470を備えることにより、受動形態変更機構を有することによって当該能動関節部421b,421cに作用する自重が増える場合であっても、能動関節部421b,421cに設けられるアクチュエータ430の大型化が抑制される。
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。また、上記各実施形態で説明した構成例は、相互に適宜組み合わせて、あるいは、置換して構成し得る。
例えば、上記実施形態に係る支持アーム装置400は、受動形態変更機構の変位量があらかじめ複数段階で設定可能になっており、設定され得るアーム部420の形態のパターンに応じてあらかじめ記憶された複数のマスプロパティ情報が制御に用いられていたが、本開示に係る技術はかかる例に限定されない。受動形態変更機構が連続的に変位可能である場合には、あらかじめ記憶されたマスプロパティ情報を用いる代わりに、センサにより検出される受動形態変更機構の変位量に基づいて演算によりマスプロパティ情報を求めるようにしてもよい。
また、本開示に係る技術が適用される対象は、医療分野に限定されず、医療分野以外の他の分野であってもよい。例えば、本開示に係る技術は、工場において製品の組み立て工程や検査工程に用いられる工業用の支持アーム装置の重力補償に対しても好適に適用可能である。本開示に係る技術を用いることにより、工業用の支持アーム装置においても、上述した実施形態と同様に、当該支持アーム装置をより小型に、かつより軽量に構成することが可能となり、製造コストの低減や、設置スペースの自由度の向上等の効果を得ることができる。
また、本明細書に記載された効果は、あくまで説明的または例示的なものであって限定的ではない。つまり、本開示に係る技術は、上記の効果とともに、または上記の効果に代えて、本明細書の記載から当業者には明らかな他の効果を奏しうる。
なお、以下のような構成も本開示の技術的範囲に属する。
(1)複数のリンクを連結し、アクチュエータにより駆動されて前記複数のリンクから構成されるアーム部の姿勢を変化し得る複数の能動関節部と、
前記能動関節部に作用するトルクを検出するトルクセンサと、
前記アーム部の形態を変化し得る少なくとも一つの受動形態変更機構と、
を備えた、医療用支持アーム装置。
(2)前記受動形態変更機構の変位量を検出するセンサを備える、前記(1)に記載の医療用支持アーム装置。
(3)前記受動形態変更機構は、あらかじめ複数段階に設定された変位量で変位可能である、前記(1)又は(2)に記載の医療用支持アーム装置。
(4)前記受動形態変更機構が受動スライド機構である、前記(1)〜(3)のいずれか1項に記載の医療用支持アーム装置。
(5)前記受動形態変更機構が受動関節部である、前記(1)〜(3)のいずれか1項に記載の医療用支持アーム装置。
(6)前記アーム部は、少なくとも6自由度以上の自由度を有し、
前記受動形態変更機構は、前記アーム部の先端側の少なくとも3つの前記能動関節部よりも根元側に配置される、前記(1)〜(5)のいずれか1項に記載の医療用支持アーム装置。
(7)前記受動形態変更機構は、前記アーム部を先端側の部分と根元側の部分とに分離し得る脱着機構を有する、前記(1)〜(6)のいずれか1項に記載の医療用支持アーム装置。
(8)少なくとも一つの前記能動関節部に、前記アーム部の自重を補償する重力補償機構を有する、前記(1)〜(7)のいずれか1項に記載の医療用支持アーム装置。
(9)前記アーム部の傾きを検出する姿勢センサを備える、前記(1)〜(8)のいずれか1項に記載の医療用支持アーム装置。
(10)前記アーム部の先端部に医療用器具が支持される、前記(1)〜(9)のいずれか1項に記載の医療用支持アーム装置。
(11)前記医療用器具が、内視鏡又は顕微鏡カメラである、前記(10)に記載の医療用支持アーム装置。
(12)前記複数の能動関節部に設けられた前記アクチュエータを駆動して前記アーム部の全身協調制御を行う制御部を備える、前記(1)〜(11)のいずれか1項に記載の医療用支持アーム装置。
(13)前記制御部は、前記受動形態変更機構の変位量に基づいて前記全身協調制御を行う、前記(12)に記載の医療用支持アーム装置。
(14)前記制御部は、あらかじめ複数段階に設定された前記受動形態変更機構の前記変位量に基づいてあらかじめ設定された前記全身協調制御の制御値を用いる、前記(13)に記載の医療用支持アーム装置。
(15)前記制御部は、前記アーム部に作用する重力を打ち消すよう前記アクチュエータを制御するとともに、外部からさらに与えられた力の方向への前記アーム部の移動をアシストするように前記アクチュエータを制御する、前記(12)〜(14)のいずれか1項に記載の医療用支持アーム装置。