JP2016159109A - Muscular strength assisting device - Google Patents
Muscular strength assisting device Download PDFInfo
- Publication number
- JP2016159109A JP2016159109A JP2015043898A JP2015043898A JP2016159109A JP 2016159109 A JP2016159109 A JP 2016159109A JP 2015043898 A JP2015043898 A JP 2015043898A JP 2015043898 A JP2015043898 A JP 2015043898A JP 2016159109 A JP2016159109 A JP 2016159109A
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- arrangement
- placement portion
- arrangement portion
- attached
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000003387 muscular Effects 0.000 title claims abstract description 40
- 210000000689 upper leg Anatomy 0.000 claims abstract description 42
- 210000003205 muscle Anatomy 0.000 claims description 32
- 238000012544 monitoring process Methods 0.000 claims description 30
- 239000012530 fluid Substances 0.000 claims description 20
- 238000002347 injection Methods 0.000 claims description 6
- 239000007924 injection Substances 0.000 claims description 6
- 238000012806 monitoring device Methods 0.000 claims description 2
- 238000005452 bending Methods 0.000 abstract description 54
- 210000002414 leg Anatomy 0.000 abstract description 34
- 230000004048 modification Effects 0.000 description 28
- 238000012986 modification Methods 0.000 description 28
- 238000001514 detection method Methods 0.000 description 17
- 238000004804 winding Methods 0.000 description 10
- 230000009471 action Effects 0.000 description 9
- 230000008859 change Effects 0.000 description 8
- 230000004323 axial length Effects 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 230000003183 myoelectrical effect Effects 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 230000000903 blocking effect Effects 0.000 description 3
- 239000004744 fabric Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- 230000008602 contraction Effects 0.000 description 2
- 238000005549 size reduction Methods 0.000 description 2
- 230000000087 stabilizing effect Effects 0.000 description 2
- 206010050031 Muscle strain Diseases 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000001217 buttock Anatomy 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000004705 lumbosacral region Anatomy 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
- A61F2/70—Operating or control means electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Vascular Medicine (AREA)
- Cardiology (AREA)
- Transplantation (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Prostheses (AREA)
Abstract
Description
本発明は、筋力補助装置に関する。 The present invention relates to a muscle force assisting device.
筋力補助装置は、人体に装着され人間の動作を補助する。例えば、特許文献1には、一端部が肩部に装着されるとともに他端部が下半身に装着されることにより背部に沿って延在する弾性体と、この弾性体を長手方向に伸長させる電動式ワイヤ巻取装置(以下、巻取装置と略す。)と、を有する筋力補助装置が開示されている。
The muscle force assisting device is attached to a human body and assists human movement. For example,
この特許文献1の筋力補助装置は、人が前屈姿勢をとった際に巻取装置によって弾性体を巻き取り、弾性体を伸長させる。これにより、弾性体に弾性力が生じ、この弾性力によって前屈姿勢維持のための腰部の筋負担を軽減させることができる。また、この筋力補助装置によれば、この際に生じた弾性力が、人が直立姿勢に戻る際の動作を補助するように作用することで、直立姿勢への復帰時の腰部への筋負担も軽減させることができる。さらに、人が前屈姿勢から直立姿勢に戻った際には、巻取装置によって弾性体が繰り出されることにより、弾性体の弾性力が消滅する。これにより、直立姿勢時に、弾性体の弾性力によって不所望に筋負担が生じることを防止することもできる。
The muscle force assisting device of
ところで、上述の特許文献1の筋力補助装置では、巻取装置が人の腰部に設けられ、弾性体の一端部が肩部に装着され、弾性体の他端部が腰部の後方で前記巻取装置に接続される。巻取装置は、人が前屈姿勢をとった際に弾性体を巻き取ることにより弾性体を伸長させ、この伸長による弾性体の弾性力が、人が直立姿勢に戻る際の動作を補助するように作用する。ここで、この弾性力は、腰部と背部との連結点を回転軸としたモーメントを生じさせることにより、人が直立姿勢に戻る際の動作を補助する。これにより、直立姿勢への復帰時の腰部への筋負担が軽減する。
By the way, in the above-described muscular strength assisting device of
しかしながら、特許文献1の筋力補助装置では、弾性体の他端部と巻取装置とが、腰部から比較的近い位置で接続されているため、腰部と背部との連結点を回転軸としたモーメントのモーメントアームが比較小さい。したがって、人が前屈姿勢から直立姿勢に戻る際の動作を十分に補助するための所望のモーメントを確保するには、弾性体を大きく伸長させて、弾性体の弾性力を大きくする必要が生じ得る。そのため、巻取装置の出力を大きくする必要が生じ得る。これにより、巻取装置が大型化することで、装置全体が大型化するとともに、装置全体の重量が増加してしまう虞がある。
However, in the muscular strength assisting device of
また、特許文献1の筋力補助装置は、上半身を腰部に対して前下方に屈曲させた前屈姿勢からの直立姿勢への復帰の動作を補助するが、下半身(脚部)の屈曲姿勢を伸び姿勢に復帰させる動作を補助することは考慮していない。そのため、脚部の動作は補助されない。作業現場等においては、人が前屈姿勢をとる際に、脚部も屈曲させて重量物を持ち上げる等の動作が頻繁に行われるため、脚部の動作に関しても補助されることが望ましい。
In addition, the muscle strength assisting device of
本発明は、上記実情を考慮してなされたものであって、人が前屈姿勢および脚部の屈曲姿勢から復帰する際の動作を、効果的に補助することができ、この動作を補助するための所望のモーメントを、当該モーメントの作用点における力を生じさせるアクチュエータの出力を小さく抑えながらも確保できることにより、装置全体の大型化及び重量増加を抑制することができる筋力補助装置を提供することを目的とする。 The present invention has been made in consideration of the above-mentioned circumstances, and can effectively assist the operation when a person returns from the forward bending posture and the bending posture of the leg, and assists this operation. To provide a muscle force assisting device that can suppress the increase in size and weight of the entire device by ensuring a desired moment for the moment while suppressing the output of an actuator that generates a force at the point of application of the moment. With the goal.
本発明は、上半身に取り付けられる第1身体側配置部と前記第1身体側配置部に対して離接可能な第1外側配置部とを含み、前記第1身体側配置部および前記第1外側配置部間の距離を変化させることが可能な第1アクチュエータ、を有する第1補助手段と、腰部に取り付けられる第2身体側配置部と前記第2身体側配置部に対して離接可能な第2外側配置部とを含み、前記第2身体側配置部および前記第2外側配置部間の距離を変化させることが可能な第2アクチュエータ、を有し、且つ前記第2外側配置部を前記第1外側配置部に取り付けられる第2補助手段と、下半身に取り付けられる第3身体側配置部と前記第3身体側配置部に対して離接可能な第3外側配置部とを含み、前記第3身体側配置部および前記第3外側配置部間の距離を変化させることが可能な第3アクチュエータ、を有し、且つ前記第3外側配置部を前記第2外側配置部に取り付けられる第3補助手段と、前記第1アクチュエータおよび第3アクチュエータの動作前に、前記第2アクチュエータの前記第2外側配置部が前記腰部から離れるように前記第2アクチュエータを動作させる制御装置と、を備え、前記第2アクチュエータの前記第2身体側配置部および前記第2外側配置部間を結ぶ方向が前記第1アクチュエータの前記第1身体側配置部および前記第1外側配置部間を結ぶ方向と非平行となるように、身体の背部側において、前記第1補助手段が上半身に取り付けられ、且つ前記第2補助手段が腰部に取り付けられ、前記第2アクチュエータの前記第2身体側配置部および前記第2外側配置部間を結ぶ方向が前記第3アクチュエータの前記第3身体側配置部および前記第3外側配置部間を結ぶ方向と非平行となるように、身体の背部側において、前記第3補助手段が下半身に取り付けられ、前記制御装置は、状態監視手段を有し、当該状態監視手段によって前記第2アクチュエータの前記第2外側配置部が前記腰部から離れて所定の状態となったことを検出したときに、前記第1アクチュエータを、前記第1身体側配置部および前記第1外側配置部間の距離が短くなるように動作させ、その後、前記第3アクチュエータを、前記第3身体側配置部および前記第3外側配置部間の距離が短くまたは長くなるように動作させる、筋力補助装置、である。
なお、上記内容における「上半身に取り付けられる」という記載は、上半身に直接的に取り付けられること、または、上半身に間接的に取り付けられることを意味する。具体的には、上半身に直接的に取り付けられるとは、例えば、第1アクチュエータの第1身体側配置部が、人の骨格に取り付けられること等を意味する。また、上半身に間接的に取り付けられるとは、例えば、第1アクチュエータの第1身体側配置部が、人の上半身の一部に装着される装着具を介して上半身の一部に取り付けられることや、上半身の一部に装着される装着具およびこれに接続されるワイヤ等を介して上半身の一部に取り付けられることを意味する。
なお、上記内容における「腰部に取り付けられる」や「下半身に取り付けられる」という記載も、上述と同様に、腰部または下半身に直接的に取り付けられること、または、腰部または下半身に間接的に取り付けられることを意味する。
The present invention includes a first body side placement portion attached to the upper body and a first outer placement portion detachable from the first body side placement portion, the first body side placement portion and the first outer side. A first auxiliary means having a first actuator capable of changing a distance between the placement portions; a second body-side placement portion attached to the waist; and a second body-side placement portion that is detachable from the second body-side placement portion A second actuator that can change a distance between the second body-side placement portion and the second outer placement portion, and the second outer placement portion is 1st 2nd auxiliary means attached to an outside arrangement part, the 3rd body side arrangement part attached to the lower body, and the 3rd outside arrangement part which can be separated from the 3rd body side arrangement part, The 3rd The distance between the body side arrangement part and the third outer arrangement part A third actuator having a third actuator, and the third outer arrangement portion attached to the second outer arrangement portion, and before the operation of the first actuator and the third actuator, A control device that operates the second actuator so that the second outer arrangement portion of the second actuator is separated from the waist portion, and the second body side arrangement portion and the second outer arrangement of the second actuator. On the back side of the body, the first auxiliary means is placed on the upper body so that the direction connecting the parts is not parallel to the direction connecting the first body side arrangement part and the first outer arrangement part of the first actuator. And the second auxiliary means is attached to the waist, and connects the second body side arrangement part and the second outer arrangement part of the second actuator. On the back side of the body, the third auxiliary means is attached to the lower body so that the direction is non-parallel to the direction connecting the third body side arrangement part and the third outside arrangement part of the third actuator, The control device includes state monitoring means, and when the state monitoring means detects that the second outer arrangement portion of the second actuator is separated from the waist and is in a predetermined state, the first monitoring device The actuator is operated so that the distance between the first body side placement portion and the first outside placement portion is shortened, and then the third actuator is moved to the third body side placement portion and the third outside placement portion. It is a muscular strength assisting device that operates so that the distance between them is short or long.
In addition, the description of “attached to the upper body” in the above content means that it is directly attached to the upper body or indirectly attached to the upper body. Specifically, being directly attached to the upper body means, for example, that the first body side arrangement portion of the first actuator is attached to a human skeleton. Indirect attachment to the upper body means, for example, that the first body-side arrangement portion of the first actuator is attached to a part of the upper body via an attachment that is attached to a part of the upper body of the person. It means that it is attached to a part of the upper body through a mounting tool attached to a part of the upper body and a wire connected to the mounting tool.
In addition, the description of “attached to the waist” and “attached to the lower body” in the above contents is also directly attached to the waist or the lower body, or indirectly attached to the waist or the lower body, as described above. Means.
本発明によれば、第2補助手段の第2アクチュエータの第2身体側配置部および第2外側配置部間を結ぶ方向が第1補助手段の第1アクチュエータの第1身体側配置部および第1外側配置部間を結ぶ方向と非平行となるように、身体の背部側において、第1補助手段が上半身に取り付けられ、且つ第2補助手段が腰部に取り付けられる。この状態において、第1アクチュエータが、第1身体側配置部および第1外側配置部間の距離を変化させた際に、第1アクチュエータで生じる力が作用点となって、上半身と腰部とを相対移動させる動作を補助するためのモーメントを生じさせることができる。これにより、人が前屈姿勢から復帰する際の動作を補助することができる。そして、この際に、第2アクチュエータが、第2身体側配置部および第2外側配置部間の距離を長くなるように増大させることで、モーメントのモーメントアームを増大させることができる。これにより、モーメントアームを増大させた後の状態においては、第1補助手段の第1アクチュエータの出力を、モーメントアームを増大させる前の状態で所望のモーメントを得るために必要となる第1アクチュエータの出力よりも小さく抑えた場合であっても、上述の所望のモーメントと同等のモーメントを確保することができる。これにより、本発明によれば、上半身と腰部を相対移動させる動作を補助するための所望のモーメントを、当該モーメントの作用点における力を生じさせるアクチュエータの出力を小さく抑えながらも確保できることにより、装置全体の大型化及び重量増加を抑制することができる。
また、第2補助手段の第2アクチュエータの第2身体側配置部および第2外側配置部間を結ぶ方向が第3補助手段の第3アクチュエータの第3身体側配置部および第3外側配置部間を結ぶ方向と非平行となるように、身体の背部側において、第3補助手段が下半身に取り付けられる。この状態において、第3アクチュエータが、その第3身体側配置部および第3外側配置部間の距離を変化させた際に、第3アクチュエータで生じる力が作用点となって、下半身と腰部とを相対移動させる動作を補助するためのモーメントを生じさせることができる。これにより、人が屈曲姿勢から復帰する際の動作を補助することができる。そして、この際に、第2アクチュエータが、その第2身体側配置部および第2外側配置部間の距離を長くなるように増大させることで、モーメントのモーメントアームを増大させることができる。これにより、モーメントアームを増大させた後の状態においては、第3補助手段の第3アクチュエータの出力を、モーメントアームを増大させる前の状態で所望のモーメントを得るために必要となる第3アクチュエータの出力よりも小さく抑えた場合であっても、上述の所望のモーメントと同等のモーメントを確保することができる。これにより、本発明によれば、下半身と腰部を相対移動させる動作を補助するための所望のモーメントを、当該モーメントの作用点における力を生じさせるアクチュエータの出力を小さく抑えながらも確保できることにより、装置全体の大型化及び重量増加を抑制することができる。
しかも、制御装置は、状態監視手段によって第2アクチュエータの第2外側配置部が腰部から離れて所定の状態となったことを検出したときに、第1アクチュエータを、第1身体側配置部および第1外側配置部間の距離が短くなるように動作させ、その後、第3アクチュエータを、第3身体側配置部および第3外側配置部間の距離が短くまたは長くなるように動作させるため、第1アクチュエータおよび第3アクチュエータを動作させる際に、確実に増大されたモーメントアームを確保できる。さらには、第3アクチュエータの動作よりも先に、第1アクチュエータを動作させることにより、人の腰部への負担を効果的に軽減することができる。
According to the present invention, the direction connecting the second body-side arrangement portion and the second outer arrangement portion of the second actuator of the second auxiliary means is the first body-side arrangement portion of the first actuator of the first auxiliary means and the first. On the back side of the body, the first auxiliary means is attached to the upper body and the second auxiliary means is attached to the waist so as to be non-parallel to the direction connecting the outer arrangement portions. In this state, when the first actuator changes the distance between the first body side arrangement part and the first outer side arrangement part, the force generated by the first actuator becomes the point of action, and the upper body and the waist part are relative to each other. A moment for assisting the moving operation can be generated. Thereby, the operation | movement at the time of a person returning from a forward bending posture can be assisted. At this time, the second actuator can increase the moment arm of the moment by increasing the distance between the second body side arrangement portion and the second outer arrangement portion. Thereby, in the state after increasing the moment arm, the output of the first actuator of the first auxiliary means is used to obtain the desired moment in the state before increasing the moment arm. Even when the output is kept smaller than the output, a moment equivalent to the above-mentioned desired moment can be ensured. Thereby, according to the present invention, it is possible to secure a desired moment for assisting the relative movement of the upper body and the waist while suppressing the output of the actuator that generates the force at the action point of the moment, Overall enlargement and weight increase can be suppressed.
The direction connecting the second body-side placement portion and the second outer placement portion of the second actuator of the second auxiliary means is between the third body-side placement portion and the third outer placement portion of the third actuator of the third auxiliary means. The third auxiliary means is attached to the lower body on the back side of the body so as to be non-parallel to the direction connecting the two. In this state, when the third actuator changes the distance between the third body side arrangement part and the third outer side arrangement part, the force generated by the third actuator becomes an action point, and the lower body and the waist are A moment for assisting the relative movement can be generated. Thereby, the operation | movement at the time of a person returning from a bending posture can be assisted. At this time, the second actuator can increase the moment arm of the moment by increasing the distance between the second body side arrangement portion and the second outer arrangement portion. Thereby, in the state after increasing the moment arm, the output of the third actuator of the third auxiliary means is used to obtain the desired moment in the state before increasing the moment arm. Even when the output is kept smaller than the output, a moment equivalent to the above-mentioned desired moment can be ensured. Thereby, according to the present invention, it is possible to secure a desired moment for assisting the relative movement of the lower body and the waist while suppressing the output of the actuator that generates a force at the point of action of the moment, Overall enlargement and weight increase can be suppressed.
In addition, when the state monitoring means detects that the second outer placement portion of the second actuator has moved away from the waist and has reached a predetermined state, the control device moves the first actuator to the first body side placement portion and the first body side placement portion. The first actuator is operated so that the distance between the outer placement portions is shortened, and then the third actuator is operated so that the distance between the third body side placement portion and the third outer placement portion is shorter or longer. When operating the actuator and the third actuator, it is possible to ensure an increased moment arm. Furthermore, by operating the first actuator prior to the operation of the third actuator, it is possible to effectively reduce the burden on the human waist.
また、本発明の筋力補助装置においては、前記第3補助手段の前記第3アクチュエータの前記第3身体側配置部は、下半身のうちの大腿部に取り付けられ、前記制御装置は、前記第3アクチュエータを、前記第3身体側配置部および前記第3外側配置部間の距離が短くなるように動作させてもよい。 In the muscle force assisting device of the present invention, the third body side arrangement portion of the third actuator of the third assisting means is attached to the thigh of the lower body, and the control device includes the third actuator. The actuator may be operated so that the distance between the third body side arrangement part and the third outer arrangement part becomes short.
また、本発明の筋力補助装置においては、前記第1補助手段の前記第1アクチュエータの前記第1身体側配置部は、上半身のうちの肩部に取り付けられてもよい。 Moreover, in the muscular strength assistance apparatus of this invention, the said 1st body side arrangement | positioning part of the said 1st actuator of a said 1st assistance means may be attached to the shoulder part of upper body.
また、本発明の筋力補助装置において、前記状態監視手段は、計時手段であり、前記第2アクチュエータの動作の開始から所定時間が経過したか否かを監視し、前記制御装置は、前記状態監視手段によって前記所定時間の経過を検出したときに、前記第1アクチュエータを動作させ、その後、前記第3アクチュエータを動作させてもよい。 Further, in the muscle force assisting device according to the present invention, the state monitoring means is a time measuring means, and monitors whether or not a predetermined time has elapsed from the start of the operation of the second actuator, and the control device monitors the state monitoring. When the passage of the predetermined time is detected by the means, the first actuator may be operated, and then the third actuator may be operated.
また、本発明の筋力補助装置においては、前記状態監視手段は、前記第2アクチュエータの前記第2身体側配置部および前記第2外側配置部間の距離が所定の長さとなったか否かを監視し、前記制御装置は、前記状態監視手段によって前記所定の長さとなったことを検出したときに、前記第1アクチュエータを動作させ、その後、前記第3アクチュエータを動作させてもよい。 In the muscle force assisting device of the present invention, the state monitoring means monitors whether the distance between the second body side arrangement portion and the second outer arrangement portion of the second actuator has become a predetermined length. Then, the control device may operate the first actuator and then operate the third actuator when the state monitoring means detects that the predetermined length has been reached.
また、本発明の筋力補助装置において、前記第2アクチュエータは、前記第2身体側配置部と、前記第2外側配置部と、前記第2身体側配置部と前記第2外側配置部とを連結し、内部に流体の流入空間が形成された弾性体と、を有し、前記弾性体の内部に対する流体の流入および排出を切り換えて前記第2身体側配置部および前記第2外側配置部間の距離を変化させることが可能となっていてもよい。そして、前記状態監視手段は、前記第2アクチュエータの前記弾性体の内部の圧力が所定の圧力となったか否かを監視し、前記制御装置は、前記状態監視手段によって前記所定の圧力となったことを検出したときに、前記第1アクチュエータを動作させ、その後、前記第3アクチュエータを動作させてもよい。 Further, in the muscle force assisting device of the present invention, the second actuator connects the second body side placement portion, the second outside placement portion, the second body side placement portion, and the second outside placement portion. And an elastic body in which a fluid inflow space is formed, and switching between inflow and discharge of the fluid to and from the inside of the elastic body to switch between the second body side arrangement portion and the second outer arrangement portion It may be possible to change the distance. The state monitoring means monitors whether or not the pressure inside the elastic body of the second actuator has become a predetermined pressure, and the control device has reached the predetermined pressure by the state monitoring means. When this is detected, the first actuator may be operated, and then the third actuator may be operated.
本発明によれば、人が前屈姿勢および脚部の屈曲姿勢から復帰する際の動作を、効果的に補助することができ、この動作を補助するための所望のモーメントを、当該モーメントの作用点における力を生じさせるアクチュエータの出力を小さく抑えながらも確保できることにより、装置全体の大型化及び重量増加を抑制することができる。 ADVANTAGE OF THE INVENTION According to this invention, the operation | movement at the time of a person returning from the forward bending attitude | position and the bending attitude | position of a leg can be effectively assisted, and the desired moment for assisting this operation | movement is applied to the action of the said moment. By securing the output of the actuator that generates a force at a point while keeping it small, it is possible to suppress an increase in size and weight of the entire apparatus.
以下、図面を参照しながら本発明の一実施の形態について説明する。 Hereinafter, an embodiment of the present invention will be described with reference to the drawings.
図1乃至図4には、本発明の一実施の形態にかかる筋力補助装置1が人の身体に装着された状態が示されている。この筋力補助装置1は、第1補助ユニット10と、第2補助ユニット20と、第3補助ユニット30と、これら各補助ユニット10,20,30の動作を制御する制御ユニット40と、を備えている。
1 to 4 show a state in which the muscle
(第1補助ユニット)
第1補助ユニット10は、身体の一部(本実施の形態では肩部S)に取り付けられる第1身体側配置部11Aとこの第1身体側配置部11Aに対して離接可能な第1外側配置部11Bとを含み、これら第1身体側配置部11Aおよび第1外側配置部11B間の距離を変化させることが可能な第1アクチュエータ11、を有する。本実施の形態における第1アクチュエータ11は、第1身体側配置部11Aと、第1外側配置部11Bと、これら第1身体側配置部11Aと第1外側配置部11Bとを連結する弾性体からなる筒状部11Cと、を有している。
(First auxiliary unit)
The first
第1アクチュエータ11は、流体注入型アクチュエータ(いわゆる人工筋肉型アクチュエータ)であり、筒状部11Cの内部に対する流体の流入および排出を切り換えて筒状部11Cを弾性変形させることにより、第1身体側配置部11Aおよび第1外側配置部11B間の距離を変化させることが可能となっている。上述の筒状部11Cの内部に流入させる流体としては、本実施の形態では空気が用いられる。当該空気は、制御ユニット40における空気供給部41(図1参照)から供給される。
The
図示のように、第1身体側配置部11Aは、ワイヤ12Aを介して、人の上半身のうちの肩部Sに装着された肩部装着具13に接続されている。これにより、第1補助ユニット10では、第1アクチュエータ11の第1身体側配置部11Aが、人の肩部Sに間接的に取り付けられている。ワイヤ12Aは、金属製のワイヤ等であり、弾性係数が高い材料からなる。肩部装着具13は、例えば布製であり、人の肩部Sに巻き掛けられる肩掛け部13Aと、肩掛け部13Aに人の背部B側で連結される連結部13Bと、を有している。このうち、連結部13Bに、ワイヤ12Aが接続されている。本実施の形態においては、ワイヤ12Aの端部が、連結部13Bに対し、上下方向および左右方向に揺動可能に接続されている。このような接続態様を実現する手段としては、例えば、連結部13Bに設けられたリング状の部材に、ワイヤ12Aの端部に設けられた開閉式のフック(カラビナ等)を取り付ける等の態様が挙げられる。なお、本実施の形態でいう上半身とは、人の身体のうちの腰部Wよりも上方の部分(肩部S、背部B等)を意味し、下半身とは、人の身体のうちの腰部Wよりも下方の部分(大腿部TL,TR、下腿部、足部等)を意味する。
As shown in the figure, the first body-
本実施の形態においては、上述の連結部13Bに、胴体姿勢検出センサ14(図2または図4参照)が設けられ、この胴体姿勢検出センサ14は、人が直立姿勢から前屈姿勢に移行する際の前屈姿勢の程度を示す信号を、制御ユニット40に出力する。胴体姿勢検出センサ14としては、例えば、筋電センサ、角度センサ、加速度センサ、歪みゲージ等が用いられ得る。なお、本実施の形態において、「直立姿勢」とは、腰部Wに対して背部Bが前方に屈曲しておらず、腰部Wの真っ直ぐ上方に肩部Sが位置する姿勢を意味する。
In the present embodiment, a trunk posture detection sensor 14 (see FIG. 2 or FIG. 4) is provided in the connecting
一方、第1外側配置部11Bは、ワイヤ12Bを介して、第2補助ユニット20に取り付けられている。これにより、第1補助ユニット10では、第1アクチュエータ11の第1外側配置部11Bが、第2補助ユニット20に間接的に取り付けられている。ワイヤ12Bは、ワイヤ12Aと同様に、金属製のワイヤ等であり、弾性係数が高い材料からなる。ワイヤ12Bの端部も、第2補助ユニット20に対し、上下方向および左右方向に揺動可能に接続されている。この接続態様については、後述の第2補助ユニット20の説明において、詳述する。
On the other hand, the first
このような第1補助ユニット10では、第1アクチュエータ11における上述の筒状部11Cに制御ユニット40における空気供給部41からの空気が流入される前の状態において、第1身体側配置部11Aと第1外側配置部11Bとの間の距離が基準長さとなっている。この基準長さの状態から筒状部11Cの内部に空気が流入された際に、筒状部11Cが径方向に膨張するように弾性変形することにより筒状部11Cの軸方向の長さが収縮する。これにより、第1身体側配置部11Aと第1外側配置部11Bとの間の距離が基準長さに対して短くなることで、第1補助ユニット10の全体の長さが、筒状部11Cに空気を流入する前の全体の長さに対して短くなるようになっている。なお、第1補助ユニット10の全体の長さとは、肩部装着具13と、ワイヤ12Bのうちの第2補助ユニット20に接続される側の端部との間の長さを意味する。
In such a first
一方、上述の筒状部11Cの内部に流入された空気が排出された際には、筒状部11Cの径方向に向けた膨張が解除されることにより筒状部11Cの軸方向の長さが膨張前の状態に復元する。これにより、第1身体側配置部11Aと第1外側配置部11Bとの間の距離が基準長さに復帰することで、第1補助ユニット10の全体の長さが、筒状部11Cに空気を流入する前の全体の長さに復帰するようになっている。
On the other hand, when the air that has flowed into the
また、本実施の形態において、第1アクチュエータ11は、上述の筒状部11Cの内部に空気が流入されて筒状部11Cの軸方向の長さが収縮された際に、例えば、筒状部11Cに対する空気の流入および排出が制限されることにより、その動作を停止することが可能となっている。これにより、第1補助ユニット10では、第1アクチュエータ11の動作を停止した状態で、当該第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間の距離を所定の長さに維持することが可能となっている。これにより、第1補助ユニット10は、その全体の長さを、第1アクチュエータ11の動作を停止した状態において一定に保持することが可能となっている。
Further, in the present embodiment, the
また、図示省略するが、ワイヤ12Aと肩部装着具13の連結部13Bとの間には、ワイヤ12Aの長さ調整機構が設けられる。これにより、ワイヤ12Aの第1アクチュエータ11の第1身体側配置部11Aと肩部装着具13との間の長さを調整することが可能となっており、人の身体の大きさに応じて、ワイヤ12Aを適切な長さに調整することが可能となっている。この長さ調整機構によってワイヤ12Aの長さが調整された場合には、ワイヤ12Aは、調整された長さに維持されるようになっている。これにより、ワイヤ12Aは、第1アクチュエータ11の第1身体側配置部11Aによって引っ張られた場合であっても、調整された長さから変化することが防止される。このような長さ調整機構は、ワイヤ12Bにおいて設けられていてもよい。
Although not shown, a length adjusting mechanism for the
(第2補助ユニット)
第2補助ユニット20は、身体の一部(本実施の形態では腰部W)に取り付けられる第2身体側配置部21Aとこの第2身体側配置部21Aに対して離接可能な第2外側配置部21Bとを含み、これら第2身体側配置部21Aおよび第2外側配置部21B間の距離を変化させることが可能な第2アクチュエータ21、を有する。本実施の形態における第2アクチュエータ21は、第2身体側配置部21Aと、第2外側配置部21Bと、これら第2身体側配置部21Aと第2外側配置部21Bとを連結する弾性体からなるベローズ部21Cと、を有している。
(Second auxiliary unit)
The second
第2アクチュエータ21は、内部に流体の流入空間が形成されたベローズ部21C(蛇腹部)の内部に対する流体の流入および排出を切り換えてベローズ部21Cを伸縮させることにより、第2身体側配置部21Aおよび第2外側配置部21B間の距離を変化させることが可能となっている。上述のベローズ部21Cの内部に流入させる流体としては、本実施の形態では空気が用いられる。当該空気は、上述の筒状部11Cの場合と同様に、制御ユニット40における空気供給部41(図1参照)から供給される。また、本実施の形態においては、第2身体側配置部21Aおよび第2外側配置部21Bが板状に形成されており、第2身体側配置部21Aの外周部分に、ベローズ部21Cの伸縮方向に沿って延びる棒状の複数のガイド部材21Dが設けられている。これらガイド部材21Dに、第2外側配置部21Bの外周部分が摺動可能に挿入されることにより、第2身体側配置部21Aと第2外側配置部21Bとの相対移動が安定する。
The
図示のように、第2身体側配置部21Aは、人の腰部Wに装着された腰部装着具23に接続されている。これにより、第2補助ユニット20では、第2アクチュエータ21の第2身体側配置部21Aが、人の腰部Wに間接的に取り付けられている。腰部装着具23は、例えば布製であり、人の腹部から腰部Wに巻き掛けられている。一方、第2外側配置部21Bは、第1補助ユニット10のワイヤ12Bに接続されている。これにより、第2補助ユニット20では、第2アクチュエータ21の第2外側配置部21Bが、第1補助ユニット10の第1アクチュエータ11の第1外側配置部11Bに間接的に取り付けられている。上述したが、本実施の形態においては、第1補助ユニット10のワイヤ12Bの端部が、第2補助ユニット20に対し、上下方向および左右方向に揺動可能に接続されている。具体的には、ワイヤ12Bの端部が、第2補助ユニット20の第2外側配置部21Bの上部に対し、上下方向および左右方向に揺動可能に接続されている。このような接続態様を実現する手段としては、例えば、第2外側配置部21Bに設けられたリング状の部材に、ワイヤ12Bの端部に設けられた開閉式のフック(カラビナ等)を取り付ける等の態様が挙げられる。
As shown in the figure, the second body-
また、図1に示すように、本実施の形態では、第2補助ユニット20が、第2アクチュエータ21の伸縮方向を前後方向に沿わせた状態で腰部Wから後方に突出するように、腰部装着具23によって人の腰部Wに取り付けられている。この状態では、第1補助ユニット10が、人の背部B側において、第2補助ユニット20から人の背部Bに沿って肩部Sまで延びる状態となっている。すなわち、本実施の形態では、第2補助ユニット20の第2アクチュエータ21の第2身体側配置部21Aおよび第2外側配置部21B間を結ぶ方向が第1補助ユニット10の第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間を結ぶ方向と非平行となるように、第1補助ユニット10が肩部Sに取り付けられ、且つ第2補助ユニット20が腰部Wに取り付けられる。なお、この取付状態においては、筋力補助装置1を装着した人が直立姿勢である場合に、第1補助ユニット10が弛んだ状態で第2補助ユニット20から人の肩部Sまで延びるように調整されることが好ましい。この場合には、人が前屈姿勢を無理なくとることができる。
Further, as shown in FIG. 1, in the present embodiment, the second
また、上述のように、第1補助ユニット10のワイヤ12Bの端部が、第2補助ユニット20の第2外側配置部21Bの上部に対し接続された状態においては、第1補助ユニット10の第1アクチュエータ11の第1外側配置部11Bが、ワイヤ12Bおよび腰部Wに取り付けられた第2補助ユニット20を介して、人の腰部Wに間接的に取り付けられた状態ともいえる。すなわち、第2補助ユニット20は、第1補助ユニット10の第1アクチュエータ11の第1外側配置部11Bを間接的に腰部Wに取り付けるための取付部材として機能する。取付部材として機能する第2補助ユニット20は、腰部Wの後方の位置で、その第2外側配置部21Bと第1アクチュエータ11の第1外側配置部11Bとをワイヤ12Bを介して接続して、第1アクチュエータ11の第1外側配置部11Bを腰部Wに間接的に取り付けている。
Further, as described above, in the state where the end of the
このような第2補助ユニット20では、第2アクチュエータ21における上述のベローズ部21Cに制御ユニット40における空気供給部41からの空気が流入される前の状態において、第2身体側配置部21Aと第2外側配置部21Bとの間の距離が基準長さとなっている。この基準長さの状態からベローズ部21Cの内部に空気が流入された際に、ベローズ部21Cが伸長する。これにより、第2身体側配置部21Aと第2外側配置部21Bとの間の距離が基準長さに対して長くなるようになっている。一方、上述のベローズ部21Cの内部に流入された空気が排出された際には、ベローズ部21Cが伸長前の状態に収縮する。これにより、第2身体側配置部21Aと第2外側配置部21Bとの間の距離が基準長さに復帰するようになっている。
In such a second
また、本実施の形態において、第2アクチュエータ21は、上述のベローズ部21Cの内部に空気が流入されてベローズ部21Cが伸長された際に、例えば、ベローズ部21Cに対する空気の流入および排出が制限されることにより、その動作を停止することが可能となっている。これにより、第2補助ユニット20は、第2アクチュエータ21の動作を停止した状態において、当該第2アクチュエータ21の第2身体側配置部21Aおよび第2外側配置部21B間の距離を所定の長さに維持することが可能となっている。
Further, in the present embodiment, the
(第3補助ユニット)
第3補助ユニット30は、身体の一部(本実施の形態では大腿部TL,TR)に取り付けられる第3身体側配置部31Aとこの第3身体側配置部31Aに対して離接可能な第3外側配置部31Bとを含み、これら第3身体側配置部31Aおよび第3外側配置部31B間の距離を変化させることが可能な第3アクチュエータ31、を有する。本実施の形態においては、筋力補助装置1が、左右に配置される2つの第3補助ユニット30を有しており、左右の第3補助ユニット30の各々が、第3アクチュエータ31を有している。第3アクチュエータ31の各々は、第3身体側配置部31Aと、第3外側配置部31Bと、これら第3身体側配置部31Aと第3外側配置部31Bとを連結する弾性体からなる筒状部31Cと、を有している。
(3rd auxiliary unit)
The third
第3アクチュエータ31は、流体注入型アクチュエータ(いわゆる人工筋肉型アクチュエータ)であり、上述した第1アクチュエータ11と同様の構成を有している。すなわち、第3アクチュエータ31は、筒状部31Cの内部に対する流体の流入および排出を切り換えて筒状部31Cを弾性変形させることにより、第3身体側配置部31Aおよび第3外側配置部31B間の距離を変化させることが可能となっている。上述の筒状部31Cの内部に流入させる流体としては、第1アクチュエータ11および第2アクチュエータ21の場合と同様に、空気が用いられ、当該空気は、制御ユニット40における空気供給部41から供給される。
The
図示のように、2つの第3アクチュエータ31の各々の第3身体側配置部31Aは、大腿部装着具33に接続されている。大腿部装着具33は、人の左大腿部TLに装着された左大腿部装着具33Lと、人の右大腿部TRに装着された右大腿部装着具33R(図2等参照)と、を有している。左に配置された第3補助ユニット30の第3アクチュエータ31の第3身体側配置部31Aは、ワイヤ32A(図2参照)を介して左大腿部装着具33Lに接続されている。右に配置された第3補助ユニット30の第3アクチュエータ31の第3身体側配置部31Aは、ワイヤ32A(図2参照)を介して右大腿部装着具33Rに接続されている。これにより、第3補助ユニット30では、第3アクチュエータ31の各々の第3身体側配置部31Aが、人の下半身のうちの大腿部TL,TRに間接的に取り付けられている。なお、ワイヤ32Aは、金属製のワイヤ等であり、弾性係数が高い材料からなる。また、左大腿部装着具33Lおよび右大腿部装着具33Rは、例えば布製であり、大腿部TL,TRの各々に巻き掛けられている。
As shown in the figure, the third body
本実施の形態においては、左のワイヤ32Aの端部が左大腿部装着具33Lに対し、上下方向および左右方向に揺動可能に接続され、右のワイヤ32Aの端部が右大腿部装着具33Rに対し、上下方向および左右方向に揺動可能に接続されている。このような接続態様を実現する手段としては、例えば、左大腿部装着具33Lおよび右大腿部装着具33Rの各々に設けられたリング状の部材に、左右のワイヤ32Aの端部に設けられた開閉式のフック(カラビナ等)の各々を取り付ける等の態様が挙げられる。
In the present embodiment, the end of the
また、本実施の形態においては、上述の左大腿部装着具33Lおよび右大腿部装着具33Rの各々に、脚部姿勢検出センサ34が設けられ、この脚部姿勢検出センサ34は、人が脚部を伸ばした姿勢(伸び姿勢)から屈曲姿勢に移行する際の屈曲姿勢の程度を示す信号を、制御ユニット40に出力する。脚部姿勢検出センサ34としては、例えば、筋電センサ、角度センサ、加速度センサ、歪みゲージ等が用いられ得る。
In this embodiment, each of the left
一方、2つの第3アクチュエータ31の各々の第3外側配置部31Bは、ワイヤ32B(図1または図2参照)を介して、第2補助ユニット20に取り付けられている。詳しくは、第3外側配置部31Bの各々は、ワイヤ32Bを介して第2補助ユニット20の第2アクチュエータ21における第2外側配置部21Bに接続されている。これにより、第3補助ユニット30では、第3アクチュエータ31の第3外側配置部31Bの各々が、第2補助ユニット20に間接的に取り付けられている。ワイヤ32Bは、ワイヤ32Aと同様に、金属製のワイヤ等であり、弾性係数が高い材料からなる。また、本実施の形態においては、第3補助ユニット30のワイヤ32Bの端部の各々が、第2補助ユニット20の第2外側配置部21Bの下部に対し、上下方向および左右方向に揺動可能に接続されている。このような接続態様を実現する手段としては、例えば、第2外側配置部21Bに設けられたリング状の部材に、ワイヤ32Bの端部の各々に設けられた開閉式のフック(カラビナ等)を取り付ける等の態様が挙げられる。
On the other hand, the third
また、本実施の形態において、左の第3アクチュエータ31の第3身体側配置部31Aが左大腿部装着具33Lを介して左大腿部TLに接続され、右の第3アクチュエータ31の第3身体側配置部31Aが右大腿部装着具33Rを介して右大腿部TRに接続された状態では、人の背部B側において、2つの第3補助ユニット30が、第2補助ユニット20から臀部の後方を通って人の左右の大腿部TL,TRまで延びる状態となっている。すなわち、本実施の形態では、第2補助ユニット20の第2アクチュエータ21の第2身体側配置部21Aおよび第2外側配置部21B間を結ぶ方向が第3補助ユニット30の第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間を結ぶ方向と非平行となるように、第3補助ユニット30が左右の大腿部TL,TRに取り付けられる。なお、この取付状態においては、筋力補助装置1を装着した人が脚部を伸ばした姿勢である場合に、第3補助ユニット30が弛んだ状態で第2補助ユニット20から人の左右の大腿部TL,TRまで延びるように調整されることが好ましい。この場合には、人が屈曲姿勢を無理なくとることができる。
In the present embodiment, the third body
また、上述のように、第3補助ユニット30のワイヤ32Bの端部が、第2補助ユニット20の第2外側配置部21Bの下部に対し接続された状態においては、第3補助ユニット30の第3アクチュエータ31の第3外側配置部31Bが、ワイヤ32Bおよび腰部Wに取り付けられた第2補助ユニット20を介して、人の腰部Wに間接的に取り付けられた状態ともいえる。すなわち、第2補助ユニット20は、第3補助ユニット30の第3アクチュエータ31の第3外側配置部31Bを間接的に腰部Wに取り付けるための取付部材として機能する。取付部材として機能する第2補助ユニット20は、腰部Wの後方の位置で、その第2外側配置部21Bと第3アクチュエータ31の第3外側配置部31Bとをワイヤ32Bを介して接続して、第3アクチュエータ31の第3外側配置部31Bを腰部Wに間接的に取り付けている。
Further, as described above, in the state where the end of the
このような第3補助ユニット30の各々では、第3アクチュエータ31における上述の筒状部31Cに制御ユニット40における空気供給部41からの空気が流入される前の状態において、第3身体側配置部31Aと第3外側配置部31Bとの間の距離が基準長さとなっている。この基準長さの状態から筒状部31Cの内部に空気が流入された際に、筒状部31Cが径方向に膨張するように弾性変形することにより筒状部31Cの軸方向の長さが収縮する。これにより、第3身体側配置部31Aと第3外側配置部31Bとの間の距離が基準長さに対して短くなることで、第3補助ユニット30の全体の長さが、筒状部31Cに空気を流入する前の全体の長さに対して短くなるようになっている。なお、第3補助ユニット30の全体の長さとは、左右大腿部装着具33L,33Rと、左右のワイヤ32Bのうちの第2補助ユニット20に接続される側の端部との間の長さを意味する。
In each of such third
一方、上述の筒状部31Cの内部に流入された空気が排出された際には、筒状部31Cの径方向に向けた膨張が解除されることにより筒状部31Cの軸方向の長さが膨張前の状態に復元する。これにより、第3身体側配置部31Aと第3外側配置部31Bとの間の距離が基準長さに復帰することで、第3補助ユニット30の全体の長さが、筒状部31Cに流体を流入する前の全体の長さに復帰するようになっている。
On the other hand, when the air that has flowed into the
また、本実施の形態においても、第3アクチュエータ31の各々は、上述の筒状部31Cの内部に空気が流入されて筒状部31Cの軸方向の長さが収縮された際に、例えば、筒状部31Cに対する空気の流入および排出が制限されることにより、その動作を停止することが可能となっている。これにより、第3補助ユニット30では、第3アクチュエータ31の動作を停止した状態で、当該第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間の距離を所定の長さに維持することが可能となっている。これにより、第3補助ユニット30は、その全体の長さを、第3アクチュエータ31の動作を停止した状態において一定に保持することが可能となっている。
Also in the present embodiment, when each of the
また、図示省略するが、ワイヤ32Aと大腿部装着具33との間には、ワイヤ32Aの長さ調整機構が設けられる。これにより、ワイヤ32Aの第3アクチュエータ31の第3身体側配置部31Aと大腿部装着具33との間の長さを調整することが可能となっており、人の身体の大きさに応じて、ワイヤ32Aを適切な長さに調整することが可能となっている。この長さ調整機構によってワイヤ32Aの長さが調整された場合には、ワイヤ32Aは、調整された長さに維持されるようになっている。これにより、ワイヤ32Aは、第3アクチュエータ31の第3身体側配置部31Aによって引っ張られた場合であっても、調整された長さから変化することが防止される。このような長さ調整機構は、ワイヤ32Bにおいて設けられていてもよい。
Although not shown, a length adjustment mechanism for the
(制御ユニット)
次に、図1には、制御ユニット40が示されている。なお、説明の便宜上、図2乃至図4においては、制御ユニット40の図示が省略されている。また、図5は、制御ユニット40と、各補助ユニット10,20,30との電気的または機械的な接続態様を示すシステム構成の概略図である。図1および図5に示すように、本実施の形態の制御ユニット40は、上述した空気供給部41と、コントローラ50と、を有している。
(Controller unit)
Next, the
図1および図5に示すように、空気供給部41は、空気源42と、空気源42に接続された減圧弁43と、減圧弁43および第1アクチュエータ11の間を接続する第1配管44と、減圧弁43および第2アクチュエータ21の間を接続する第2配管45と、減圧弁43および2つの第3アクチュエータ31の間を接続する2つの第3配管46と、を有している。第1配管44には、第1供給排気切換弁47が設けられている。第2配管45には、第2供給排気切換弁48が設けられている。2つの第3配管46の各々には、第3供給排気切換弁49が設けられている。2つの第3配管46のうちの一方は、左の第3アクチュエータ31に接続され、他方は、右の第3アクチュエータ31に接続される。第3配管46および第3供給排気切換弁49の構成は左右で同一であるため、図1および図5には、2つの第3配管46および第3供給排気切換弁49の一方のみが示されている。
As shown in FIGS. 1 and 5, the
空気供給部41では、圧縮空気を充填したタンク等からなる空気源42の圧縮空気を、減圧弁43が、所定の圧力に減圧して、第1配管44、第2配管45および第3配管46に供給する。減圧弁43では、空気源42の圧力を所望の値に調整することが可能となっている。これにより、各配管44〜46を介して空気が供給される各アクチュエータ11,21,31の動作速度を調整することが可能となっている。
In the
第1配管44は、可撓性を有するチューブ等からなり、第1供給排気切換弁47は、コントローラ50に電気的に接続されている。第1供給排気切換弁47は、コントローラ50の指令に応じて、減圧弁43からの空気を第1アクチュエータ11の筒状部11Cの内部に流入させるか、筒状部11Cの内部に流入させた空気を排出させるか等、を切り換える。
The
第1供給排気切換弁47としては、例えば、減圧弁43に第1配管44の上流側を介して接続される接続ポートと、第1アクチュエータ11に第1配管44の下流側を介して接続される供給ポートと、大気に開放する排出ポートと、を有する3ポート弁が用いられる。この場合、第1供給排気切換弁47において、接続ポートと供給ポートとが連通されることにより、減圧弁43からの空気を第1アクチュエータ11の筒状部11Cの内部に流入させることができる。また、供給ポートと排出ポートとが連通されることにより、筒状部11Cの内部に流入させた空気を排出させることができる。また、筒状部11Cの内部に空気を流入させた後、全てのポートを遮断することにより、第1アクチュエータ11の動作を停止させることができ、第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間の距離を所定の長さに維持することもできる。
As the first supply /
同様に、第2配管45は、可撓性を有するチューブ等からなり、第2供給排気切換弁48は、コントローラ50に電気的に接続されている。第2供給排気切換弁48は、コントローラ50の指令に応じて、減圧弁43からの空気を第2アクチュエータ21のベローズ部21Cの内部に流入させるか、ベローズ部21Cの内部に流入させた空気を排出させるか等、を切り換える。
Similarly, the
第2供給排気切換弁48としては、例えば、減圧弁43に第2配管45の上流側を介して接続される接続ポートと、第2アクチュエータ21に第2配管45の下流側を介して接続される供給ポートと、大気に開放する排出ポートと、を有する3ポート弁が用いられる。この場合、第2供給排気切換弁48において、接続ポートと供給ポートとが連通されることにより、減圧弁43からの空気を第2アクチュエータ21のベローズ部21Cの内部に流入させることができる。また、供給ポートと排出ポートとが連通されることにより、ベローズ部21Cの内部に流入させた空気を排出させることができる。また、ベローズ部21Cの内部に空気を流入させた後、全てのポートを遮断することにより、第2アクチュエータ21の動作を停止させることができ、第2アクチュエータ21の第2身体側配置部21Aおよび第2外側配置部21B間の距離を所定の長さに維持することもできる。
As the second supply /
同様に、第3配管46は、可撓性を有するチューブ等からなり、第3供給排気切換弁49は、コントローラ50に電気的に接続されている。第3供給排気切換弁49は、コントローラ50の指令に応じて、減圧弁43からの空気を第3アクチュエータ31の筒状部31Cの内部に流入させるか、筒状部31Cの内部に流入させた空気を排出させるか等、を切り換える。
Similarly, the
第3供給排気切換弁48としては、例えば、減圧弁43に第3配管46の上流側を介して接続される接続ポートと、第3アクチュエータ31に第3配管46の下流側を介して接続される供給ポートと、大気に開放する排出ポートと、を有する3ポート弁が用いられる。この場合、第3供給排気切換弁49において、接続ポートと供給ポートとが連通されることにより、減圧弁43からの空気を第3アクチュエータ31の筒状部31Cの内部に流入させることができる。また、供給ポートと排出ポートとが連通されることにより、筒状部31Cの内部に流入させた空気を排出させることができる。また、筒状部31Cの内部に空気を流入させた後、全てのポートを遮断することにより、第3アクチュエータ31の動作を停止させることができ、第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間の距離を所定の長さに維持することもできる。
As the third supply /
一方、コントローラ50は、上述の供給排気切換弁47〜49に電気的に接続されるとともに、上述の胴体姿勢検出センサ14および脚部姿勢検出センサ34に電気的に接続されている。本実施の形態においては、コントローラ50が、胴体姿勢検出センサ14および脚部姿勢検出センサ34からの信号に基づいて、人が前屈姿勢および脚部の屈曲姿勢をとったことを検出した際に、供給排気切換弁47〜49に指令を出力することにより、各補助ユニット10,20,30の動作を制御する。
On the other hand, the
図5に示すように、本実施の形態のコントローラ50は、供給排気切換弁47〜49に指令を出力する指令出力部51と、状態監視部52と、を有している。本実施の形態の状態監視部52は、計時手段であり、指令出力部51の指令の出力からの時間の経過等を監視するものである。また、本実施の形態において、コントローラ50は、左右の第3アクチュエータ31に対応する2つの第3供給排気切換弁49に対しては、同一のタイミングで同様の指令を出力する。このようなコントローラ50は、CPU,ROMおよびRAM等から構成されてもよいし、複数の論理回路を有して構成されてもよい。
As shown in FIG. 5, the
(筋力補助装置の動作)
次に、以上のような構成を備える本実施の形態の筋力補助装置1の動作の一例を説明する。
(Operation of muscle strength assist device)
Next, an example of operation | movement of the muscular
図6には、本実施の形態における筋力補助装置1の動作の一例を説明するフローチャートが示されている。図7には、図6に説明される動作に対応するタイミングチャートが示されている。また、図8乃至図11には、図6のフローチャートに従って動作する筋力補助装置1の各補助ユニット10,20,30の様子が示されている。概略として、本実施の形態の筋力補助装置1は、図8に示すように、人が前屈姿勢および脚部の屈曲姿勢をとった後の直立姿勢および脚部の伸び姿勢に復帰する動作を補助するように、各補助ユニット10,20,30を制御する。以下、図6乃至図11を用いて、筋力補助装置1の動作の一例を説明する。
FIG. 6 shows a flowchart for explaining an example of the operation of the muscle
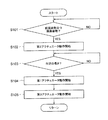
本実施の形態にかかる筋力補助装置1は、人に装着された後に、図示省略する起動スイッチが操作されることにより、起動状態となる。この際、まず、図6のステップS101に示すように、コントローラ50が、胴体姿勢検出センサ14および脚部姿勢検出センサ34からの信号に基づいて、人が前屈姿勢および脚部の屈曲姿勢をとったか否かを監視する。胴体姿勢検出センサ14および脚部姿勢検出センサ34に基づき、図8に示すような前屈姿勢および脚部の屈曲姿勢をとったことが判定された場合(YESの場合)には、処理がステップS102に進められる。一方、前屈姿勢および脚部の屈曲姿勢をとったことが判定されない場合(NOの場合)には、ステップS101において、監視が継続される。
The muscular
なお、図8に示すように、本実施の形態にかかる筋力補助装置1では、人が前屈姿勢および脚部の屈曲姿勢をとった際に、第1補助ユニット10および第3補助ユニット30が前方に引っ張られる。この場合、直立姿勢において、第1補助ユニット10が弛んだ状態で第2補助ユニット20から人の肩部Sまで延びるように調整されている際には、第1補助ユニット10の弛みがとれる。このとき、第1補助ユニット10が、第2補助ユニット20と肩部Sとの間で完全に弛みがとられた場合には、第2アクチュエータ21のベローズ部21Cが圧縮される。また、脚部の伸び姿勢において、第3補助ユニット30が弛んだ状態で第2補助ユニット20から人の大腿部TL,TRまで延びるように調整されている際には、第3補助ユニット30の弛みがとれる。このとき、第3補助ユニット30が、第2補助ユニット20と大腿部TL,TRとの間で完全に弛みがとられた場合には、第2アクチュエータ21のベローズ部21Cが圧縮される。図8に示すように、この例では、ベローズ部21Cが圧縮された状態となっている。
As shown in FIG. 8, in the muscle
前屈姿勢および脚部の屈曲姿勢がとられたことが判定された後のステップS102においては、コントローラ50が、所定のタイミング(例えば、判定から数秒後、または人からの入力のタイミング)で、指令出力部51によって第2供給排気切換弁48に指令を出力し、減圧弁43からの空気を第2アクチュエータ21のベローズ部21Cの内部に流入させる状態にする。これにより、図9に示すように、第2アクチュエータ21が動かされ、図中の矢印Xに示すように第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの距離が、ベローズ部21Cに空気が流入される前の基準長さに対して長くなる。
In step S102 after it is determined that the forward bending posture and the bending posture of the leg have been taken, the
図9に示すように、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの距離が長くなった状態では、第1補助ユニット10および第3補助ユニット30が後方に引っ張られる。これにより、人は、当初の前屈姿勢から肩部Sが起き上がるとともに、当初の脚部の屈曲姿勢から大腿部TL,TRが起き上がる。ここで、この例では、コントローラ50が、ベローズ部21Cの内部に空気を所定量だけ流入させた後に、第2アクチュエータ21の動作を停止させ、第2アクチュエータ21の第2身体側配置部21Aおよび第2外側配置部21B間の距離を所定の長さに維持するようになっている。
As shown in FIG. 9, in a state where the distance between the second body
次に、ステップS103において、コントローラ50は、第2アクチュエータ21の動作の開始から所定時間が経過したか否かを監視する。所定時間の経過を検出した場合(YESの場合)には、ステップS104に処理が進められ、所定時間の経過前である場合(NOの場合)には、ステップS103において、監視が継続される。
Next, in step S103, the
そして、ステップS104においては、コントローラ50が、指令出力部51によって第1供給排気切換弁47に指令を出力し、減圧弁43からの空気を第1アクチュエータ11の筒状部11Cの内部に流入させる状態にする。これにより、第1アクチュエータ11が動かされ、第1アクチュエータ11の第1身体側配置部11Aと第1外側配置部11Bとの距離が、筒状部11Cに空気が流入される前の基準長さに対して短くなることで、第1補助ユニット10の全体の長さが、筒状部11Cに流体を流入する前の全体の長さに対して短くなる。
In step S <b> 104, the
このとき、筋力補助装置1では、第1アクチュエータ11で生じる図9の矢印αで示す後斜め下方に向かう力が作用点となって、肩部Sと腰部Wとを相対移動させる動作を補助するためのモーメントM1が生じる。このモーメントM1は、正確には、腰部Wと、腰部Wおよび肩部Sの間に位置する背部Bとの連結点を回転軸L1としたモーメントである。このモーメントM1では、回転軸L1と、この回転軸L1から延びて第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間を結ぶ方向に直交する直線の第1アクチュエータ11との交点P1と、の間に、モーメントアームA1が設定される。肩部Sは、背部Bを介して腰部Wに回動可能または屈曲可能に連結されているため、このようなモーメントM1が肩部Sに作用した場合には、人が前屈姿勢から直立姿勢に復帰する動作が補助される。これにより、この筋力補助装置1によれば、図10に示すように、人の姿勢を、容易に、前屈姿勢から直立姿勢に復帰させることができる。
At this time, the muscular
また、上述のモーメントアームA1は、第2アクチュエータ21がその第2身体側配置部21Aおよび第2外側配置部21B間の距離を長くなるように増大させる前の図8に示すモーメントアームA2よりも大きい。これにより、本実施の形態では、モーメントアームA2からモーメントアームA1に増大させた後の状態においては、第1アクチュエータ11の出力を、モーメントアームA2の状態で所望のモーメントを得るために必要となる第1アクチュエータ11の出力よりも小さく抑えた場合であっても、上述の所望のモーメントと同等のモーメントM1を確保することができる。これにより、本実施の形態によれば、第1アクチュエータ11の小型化を図ることができる。
Further, the moment arm A1 described above is more than the moment arm A2 shown in FIG. 8 before the
また、この例では、コントローラ50が、筒状部11Cの内部に空気を所定量だけ流入させた後に、第1アクチュエータ11の動作を停止させ、第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間の距離を所定の長さに維持するようになっている。この場合、人が、例えば、重量物を支えた状態で前屈姿勢から直立姿勢に復帰した際に、重量物の影響で前屈姿勢側に身体が動いてしまうことが防止され、人を安定した状態で直立姿勢に復帰させることができる。また、上述のステップS103における状態監視部52による所定時間の監視は、第1アクチュエータ11を動かすタイミングを決定する処理であるが、本実施の形態のように第2アクチュエータ21の動作の開始から所定時間が経過したか否かを監視する構成である場合には、第1アクチュエータ11を動かすタイミングを特別なセンサを用いずに決定することができるため、有益である。
Further, in this example, the
また、次のステップS105においては、コントローラ50が、指令出力部51によって第3供給排気切換弁49に指令を出力し、減圧弁43からの空気を第3アクチュエータ31の筒状部31Cの内部に流入させる状態にする。これにより、第3アクチュエータ31が動かされ、第3アクチュエータ31の第3身体側配置部31Aと第3外側配置部31Bとの距離が、筒状部31Cに空気が流入される前の基準長さに対して短くなることで、第3補助ユニット30の全体の長さが、筒状部31Cに流体を流入する前の全体の長さに対して短くなる。
In the next step S <b> 105, the
このとき、筋力補助装置1では、第3アクチュエータ31で生じる図9の矢印βで示す後斜め上方に向かう力が作用点となって、大腿部TL,TRと腰部Wとを相対移動させる動作を補助するためのモーメントM2が生じる。このモーメントM2は、正確には、腰部Wと、大腿部TL,TRとの連結点を回転軸L1としたモーメントである。このモーメントM2では、回転軸L1と、この回転軸L1から延びて第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間を結ぶ方向に直交する直線の第3アクチュエータ31との交点P2と、の間に、モーメントアームA3が設定される。このようなモーメントM2が大腿部TL,TRに作用した場合には、人が脚部の屈曲姿勢から伸び姿勢に復帰する動作が補助される。これにより、この筋力補助装置1によれば、図10に示すように、人の姿勢を、容易に、屈曲姿勢から伸び姿勢に復帰させることができる。
At this time, in the muscle
また、上述のモーメントアームA3は、第2アクチュエータ21がその第2身体側配置部21Aおよび第2外側配置部21B間の距離を長くなるように増大させる前の図8に示すモーメントアームA4よりも大きい。これにより、本実施の形態では、モーメントアームA4からモーメントアームA3に増大させた後の状態においては、第3アクチュエータ31の出力を、モーメントアームA4の状態で所望のモーメントを得るために必要となる第3アクチュエータ31の出力よりも小さく抑えた場合であっても、上述の所望のモーメントと同等のモーメントM2を確保することができる。これにより、本実施の形態によれば、第3アクチュエータ31の小型化を図ることができる。
Further, the moment arm A3 described above is more than the moment arm A4 shown in FIG. 8 before the
また、この例では、コントローラ50が、筒状部31Cの内部に空気を所定量だけ流入させた後に、第3アクチュエータ31の動作を停止させ、第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間の距離を所定の長さに維持するようになっている。この場合、人が、例えば、重量物を支えた状態で屈曲姿勢から伸び姿勢に復帰した際に、重量物の影響で屈曲姿勢側に身体が動いてしまうことが防止され、人を安定した状態で伸び姿勢に復帰させることができる。
Further, in this example, the
その後、本実施の形態では、図10および図11を対比して明らかなように、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの距離が、図11の矢印Yに示すように、ベローズ部21Cに空気が流入される前の基準長さに復帰される。すなわち、コントローラ50は、第2供給排気切換弁48に指令を出力し、ベローズ部21Cの内部に流入させた空気を排出させる状態にする。これにより、第2アクチュエータ21によって、人に不所望に負担がかかることが抑制される。また、この際には、第1補助ユニット10および第3補助ユニット30の全体の長さも、上述の筒状部11Cまたは31Cの内部に流入された空気が排出されて、伸びた状態となる。これにより、第1アクチュエータ11および第3アクチュエータ31によって、人に不所望に負担がかかることが抑制される。
Thereafter, in the present embodiment, as is clear by comparing FIG. 10 and FIG. 11, the distance between the second body-
上述のように、本実施の形態では、人が前屈姿勢および脚部の屈曲姿勢をとった際に、まず、第2アクチュエータ21が動かされ、次に、第1アクチュエータ11が動かされ、次に、第3アクチュエータ31が動かされる。これにより、本実施の形態では、第1アクチュエータ11および第3アクチュエータ31を動かして身体の動作を補助するためのモーメントを生じさせる際に、確実に増大されたモーメントアームが確保される。また、第2アクチュエータ21が動かされた後に、第3アクチュエータ31よりも先に、第1アクチュエータ11が動かされることにより、人の腰部Wへの負担を効果的に軽減することができる。すなわち、前屈姿勢の状態が長い場合には、腰部Wへの負担が大きくなる。また、図7に示すように、本実施の形態では、第2アクチュエータ21が伸びている途中で、第1アクチュエータ11が縮み始め、第1アクチュエータ11が縮んでいる途中で、第3アクチュエータ31が縮み始めている。本実施の形態では、このように動作のタイミングを重複させることにより、前屈姿勢および脚部の屈曲姿勢をとった後の、直立姿勢および脚部の伸び姿勢への復帰の時間を、好適に短縮することができる。
As described above, in the present embodiment, when the person takes the forward bending posture and the bending posture of the leg, first, the
(効果)
以上に説明した本実施の形態にかかる筋力補助装置1では、第2補助ユニット20の第2アクチュエータ21の第2身体側配置部21Aおよび第2外側配置部21B間を結ぶ方向が第1補助ユニット10の第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間を結ぶ方向と非平行となるように、身体の背部B側において、第1補助ユニット10が上半身(肩部S)に取り付けられ、且つ第2補助ユニット20が腰部Wに取り付けられる。この状態において、第1アクチュエータ11が、第1身体側配置部11Aおよび第1外側配置部11B間の距離を変化させた際に、第1アクチュエータ11で生じる力が作用点となって、肩部Sと腰部Wとを相対移動させる動作を補助するためのモーメントを生じさせることができる。これにより、人が前屈姿勢から復帰する際の動作を補助することができる。そして、この際に、第2アクチュエータ21が、その第2身体側配置部21Aおよび第2外側配置部21B間の距離を長くなるように増大させることで、モーメントのモーメントアームを増大させることができる。これにより、モーメントアームを増大させた後の状態においては、第1補助ユニット10の第1アクチュエータ11の出力を、モーメントアームを増大させる前の状態で所望のモーメントを得るために必要となる第1アクチュエータ11の出力よりも小さく抑えた場合であっても、上述の所望のモーメントと同等のモーメントを確保することができる。これにより、本実施の形態の筋力補助装置1によれば、肩部Sと腰部Wを相対移動させる動作を補助するための所望のモーメントを、当該モーメントの作用点における力を生じさせる第1アクチュエータ11の出力を小さく抑えながらも確保できることにより、装置全体の大型化及び重量増加を抑制することができる。
また、第2補助ユニット20の第2アクチュエータ21の第2身体側配置部21Aおよび第2外側配置部21B間を結ぶ方向が第3補助ユニット30の第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間を結ぶ方向と非平行となるように、身体の背部B側において、第3補助ユニット30が下半身(大腿部TL,TR)に取り付けられる。この状態において、第3アクチュエータ31が、第3身体側配置部31Aおよび第3外側配置部31B間の距離を変化させた際に、第3アクチュエータ31で生じる力が作用点となって、大腿部TL,TRと腰部Wとを相対移動させる動作を補助するためのモーメントを生じさせることができる。これにより、人が屈曲姿勢から復帰する際の動作を補助することができる。そして、この際に、第2アクチュエータ31が、その第2身体側配置部21Aおよび第2外側配置部21B間の距離を長くなるように増大させることで、モーメントのモーメントアームを増大させることができる。これにより、モーメントアームを増大させた後の状態においては、第3補助ユニット30の第3アクチュエータ31の出力を、モーメントアームを増大させる前の状態で所望のモーメントを得るために必要となる第3アクチュエータ31の出力よりも小さく抑えた場合であっても、上述の所望のモーメントと同等のモーメントを確保することができる。これにより、本実施の形態の筋力補助装置1によれば、大腿部TL,TRと腰部Wを相対移動させる動作を補助するための所望のモーメントを、当該モーメントの作用点における力を生じさせる第3アクチュエータ31の出力を小さく抑えながらも確保できることにより、装置全体の大型化及び重量増加を抑制することができる。
しかも、本実施の形態では、制御装置であるコントローラ50が、状態監視部52によって第2アクチュエータ21の第2外側配置部21Bが腰部Wから離れて所定の状態となったことを検出したときに、第1アクチュエータ11を、第1身体側配置部11Aおよび第1外側配置部11B間の距離が短くなるように動作させ、その後、第3アクチュエータ31を、第3身体側配置部31Aおよび第3外側配置部31B間の距離が短くなるように動作させるため、第1アクチュエータ11および第3アクチュエータ31を動作させる際に、確実に増大されたモーメントアームを確保できる。さらには、第3アクチュエータ31の動作よりも先に、第1アクチュエータ11を動作させることにより、人の腰部Wへの負担を効果的に軽減することができる。
(effect)
In the muscular
Further, the direction connecting the second body
In addition, in the present embodiment, when the
したがって、人が前屈姿勢および脚部の屈曲姿勢から復帰する際の動作を、効果的に補助することができ、この動作を補助するための所望のモーメントを、当該モーメントの作用点における力を生じさせるアクチュエータの出力を小さく抑えながらも確保できることにより、装置全体の大型化及び重量増加を抑制することができる。 Therefore, it is possible to effectively assist the movement when the person returns from the forward bending posture and the bent posture of the leg, and the desired moment for assisting this movement is determined by the force at the point of action of the moment. By ensuring the output of the actuator to be generated while keeping it small, it is possible to suppress an increase in the size and weight of the entire apparatus.
また、本実施の形態では、第2補助ユニット20が、第2アクチュエータ21の動作を停止した状態で、当該第2アクチュエータ21の第2身体側配置部21Aおよび第2外側配置部21B間の距離を所定の長さに維持することが可能となっている。これにより、モーメントアームの確保のために、その第2身体側配置部21Aおよび第2外側配置部21B間の距離を長くなるように増大させた際に、モーメントアームが増大した状態を維持することが可能なため、安定した状態で人の動作を補助することができる。
In the present embodiment, the distance between the second body-
また、本実施の形態では、第1補助ユニット10が、第1アクチュエータ11の動作を停止した状態で、当該第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間の距離を所定の長さに維持することが可能となっている。これにより、モーメントを生じさせた後に、第1アクチュエータ11の動作を停止させて第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間の距離を所定の長さに維持することができる。これにより、例えば、人が重量物を支えた状態で前屈姿勢から直立姿勢に復帰した際に、重量物の影響で前屈姿勢側に身体が動いてしまうことが防止され、人を安定した状態で直立姿勢に復帰させることができる。また、その後も、第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間の距離が所定の長さに維持されることにより、直立姿勢維持のための補助が可能となる。また、重量物を人が床面等に置く際には、徐々に第1アクチュエータ11の第1身体側配置部11Aおよび第1外側配置部11B間の距離が長くなるように、筒状部11Cから空気が排出されるように制御すれば、人の腰部Wへの負担を軽減できる。
In the present embodiment, the distance between the first body-
また、第3補助ユニット30が、第3アクチュエータ31の動作を停止した状態で、当該第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間の距離を所定の長さに維持することが可能となっている。これにより、モーメントを生じさせた後に、第3アクチュエータ31の動作を停止させ、第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間の距離を所定の長さに維持することができる。これにより、例えば、人が重量物を支えた状態で屈曲姿勢から伸び姿勢に復帰した際に、重量物の影響で屈曲姿勢側に身体が動いてしまうことが防止され、人を安定した状態で伸び姿勢に復帰させることができる。また、その後も、第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間の距離が所定の長さに維持されることにより、脚部の伸び姿勢維持のための補助が可能となる。また、重量物を人が床面等に置く際には、徐々に第3アクチュエータ31の第3身体側配置部31Aおよび第3外側配置部31B間の距離が長くなるように、筒状部31Cから空気が排出されるように制御すれば、人の腰部Wへの負担を軽減できる。
Further, in a state where the third
また、本実施の形態では、コントローラ50が、第1アクチュエータ11および第3アクチュエータ31の動作前に、第2アクチュエータ21の第2外側配置部21Bが腰部Wから離れるように第2アクチュエータ21を動作させる。これにより、確実に、増大されたモーメントアームが確保されるため、第1アクチュエータ11の出力時および第3アクチュエータ31の出力時に、確実に、増大されたモーメントアームでのモーメントを生じさせることができる。
In the present embodiment, the
以上、本発明の一実施の形態を説明したが、本発明は上述の実施の形態に限定されるものではない。以下、上述の一実施の形態の変形例について、図12乃至図25を用いて説明する。以下に説明する変形例において、上述の実施の形態と共通する部分には、同一の符号が示されている。 Although one embodiment of the present invention has been described above, the present invention is not limited to the above-described embodiment. Hereinafter, modified examples of the above-described embodiment will be described with reference to FIGS. In the modified example described below, the same reference numerals are given to the portions common to the above-described embodiment.
(第2アクチュエータの変形例)
上述の実施の形態においては、第2アクチュエータ21が、第2身体側配置部21Aと、第2外側配置部21Bと、これら第2身体側配置部21Aと第2外側配置部21Bとを連結する弾性体からなるベローズ部21Cと、を有し、ベローズ部21Cの内部に対する流体の流入および排出を切り換えてベローズ部21Cを伸縮させることにより、第2身体側配置部21Aおよび第2外側配置部21B間の距離を変化させる構成を説明した。図12乃至図22には、第2アクチュエータ21の各種変形例が示されている。
(Modification of the second actuator)
In the above-described embodiment, the
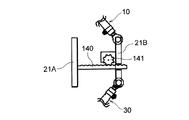
図12に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとを連結するベローズ部120が、矩形の板状の状態から一辺を回転軸として周方向に展開する構成となっている。ベローズ部120に連結された第2外側配置部21Bは、上記の回転軸を軸中心として周方向に移動して、第2身体側配置部21Aから離れるようになっている。なお、図12においては、ベローズ部120の展開状態が示されている。ベローズ部120は、空気供給部41の圧縮空気によって駆動されてもよい。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。また、第3補助ユニット30の図示は省略しているが、第2外側配置部21Bの適所に取り付ければよい。
In the modification shown in FIG. 12, the
図13に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aにネジ130が設けられ、ネジ130に第2外側配置部21Bが螺合されている。この構成では、ネジ130が回転することで、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。ネジ130は、空気供給部41の圧縮空気によって回転するエアモータ等で回転されてもよい。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bおよび第3補助ユニット30における第3アクチュエータ31の第3外側配置部31Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。
In the modification shown in FIG. 13, the
図14に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aにラック140が設けられ、第2外側配置部21Bには、ラック140に噛み合うピ二オンギヤ141が設けられている。この構成では、ピ二オンギヤ141が回転することで、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。ピ二オンギヤ141は、空気供給部41の圧縮空気によって回転するエアモータ等で回転されてもよい。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bおよび第3補助ユニット30における第3アクチュエータ31の第3外側配置部31Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。
In the modification shown in FIG. 14, a
図15に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの間に、スプリング150が設けられている。第2身体側配置部21Aには、スプリング150を圧縮状態で保持するようにスプリング150を係止する爪体を有する電磁ロック151が設けられている。この構成では、電磁ロック151によって圧縮状態で保持されたスプリング150を保持状態から解除することにより、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bおよび第3補助ユニット30における第3アクチュエータ31の第3外側配置部31Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。
In the modification shown in FIG. 15, a
図16に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの間に、カム160が回転可能に設けられている。この構成では、カム160が回転してカム山が第2外側配置部21Bを押すことにより、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。カム160は、空気供給部41の圧縮空気によって回転するエアモータ等で回転されてもよい。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bおよび第3補助ユニット30における第3アクチュエータ31の第3外側配置部31Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。
In the modification shown in FIG. 16, a
図17に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの間に、伸縮可能なリンク部材170が設けられている。この構成では、リンク部材170が伸縮することにより、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。リンク部材170は、空気供給部41の圧縮空気によって回転するエアモータ等で駆動されてもよい。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bおよび第3補助ユニット30における第3アクチュエータ31の第3外側配置部31Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。
In the modification shown in FIG. 17, an extendable /
図18に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの間に、エアシリンダ180が設けられている。この構成では、エアシリンダ180のロッドが伸縮することにより、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。エアシリンダ180は、空気供給部41の圧縮空気によって駆動されてもよい。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bおよび第3補助ユニット30における第3アクチュエータ31の第3外側配置部31Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。
In the modification shown in FIG. 18, an
図19に示す変形例では、第2身体側配置部21Aの外周部分に、棒状の複数のガイド部材21Dが設けられ、これらガイド部材21Dに、第2外側配置部21Bの外周部分が摺動可能に挿入されている。第2アクチュエータ21の第2身体側配置部21Aに第1プーリー190が設けられ、第2外側配置部21Bに第2プーリー191が設けられ、プーリー190,191には、チェーン192が巻き掛けられている。この構成では、プーリー190,191のいずれか一方を選択的に回転させることで、いずれかのプーリーでチェーン192を巻き取ることにより、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。プーリー190,191は、空気供給部41の圧縮空気によって回転するエアモータ等で回転されてもよい。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bおよび第3補助ユニット30における第3アクチュエータ31の第3外側配置部31Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。
In the modification shown in FIG. 19, a plurality of rod-shaped
図20に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの間に、流体注入型アクチュエータ部200(いわゆる人工筋肉型アクチュエータ)が設けられている。この構成では、流体注入型アクチュエータ部200に流体を流入させてその筒状部分を径方向に膨張させることにより、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。流体注入型アクチュエータ部200は、空気供給部41の圧縮空気によって駆動されてもよい。また、この例では、第1補助ユニット10における第1アクチュエータ11の第1外側配置部11Bおよび第3補助ユニット30における第3アクチュエータ31の第3外側配置部31Bが、ワイヤ等を介さずに第2外側配置部21Bに取り付けられている。
In the modification shown in FIG. 20, a fluid injection type actuator unit 200 (so-called artificial muscle type actuator) is provided between the second body
図21に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aに回転軸210が設けられ、この回転軸210に第2外側配置部21Bが回転可能に支持されている。第2外側配置部21Bは、第1辺部211Aと第2辺部211Bとを有し、これら第1辺部211Aと第2辺部211Bとは、L字型(クランク形状)をなすように結合されている。第2外側配置部21Bは、第1辺部211Aと第2辺部211Bとの結合部分を回転軸210に支持されている。この例では、第1辺部211Aおよび第2辺部211Bのうちの第2辺部211Bの先端に、第1アクチュエータ11の第1外側配置部11Bが、ワイヤを介さずに取り付けられている。そして、この構成では、第1辺部211Aが後方に向けて延び且つ第2辺部211Bが下方に延びる状態(二点鎖線で示す状態)から、第2外側配置部21Bが回転軸210を中心に回転され、第2辺部211Bが上方に回転移動することにより、第2外側配置部21Bのうちの第2辺部211Bの先端が第2身体側配置部21Aから離れるように移動する。第2外側配置部21Bは、空気供給部41の圧縮空気によって回転するエアモータ等で回転されてもよい。
In the modification shown in FIG. 21, a
図22に示す変形例では、第2アクチュエータ21の第2身体側配置部21Aに、後方に延びる案内部材220が設けられ、案内部材220に、後斜め上方に延びる案内溝221が形成されている。そして、第2外側配置部21Bは、軸部材であり、案内溝221に挿入されている。この構成では、第2外側配置部21Bが案内溝221に沿って後斜め上方に移動することにより、第2外側配置部21Bが第2身体側配置部21Aに対して移動する。
In the modification shown in FIG. 22, a
(動作の変形例)
上述の実施の形態では、図6に示したステップS103において、コントローラ50が第2アクチュエータ21の動作の開始から所定時間が経過したか否かを状態監視部52によって監視し、所定時間が経過した場合に、ステップS104において、第1アクチュエータ11が動かされる。これに代えて、図23のフローチャートに示すように、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの間の距離が、所定の長さになったか否かを状態監視部52によって監視してもよい。この場合、状態監視部52は、第2アクチュエータ21に設けられた位置センサに電気的に接続して、長さ(距離)を検出するようにしてもよい。
(Modification of operation)
In the above embodiment, in step S103 shown in FIG. 6, the
このように第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとの間の距離が、所定の長さになったか否かを監視し、第1アクチュエータ11を動かすタイミングを決定する場合には、所望のモーメントアームを確実に確保することができる。
In this way, it is monitored whether the distance between the second body-
また、図24のフローチャートに示すように、第2アクチュエータ21の第2身体側配置部21Aと第2外側配置部21Bとを連結するベローズ部21Cの内部の圧力が、所定の圧力になったか否かを状態監視部52によって監視してもよい。この場合、状態監視部52は、第2アクチュエータ21に設けられた圧力センサに電気的に接続して、圧力を検出するようにしてもよい。
Also, as shown in the flowchart of FIG. 24, whether or not the pressure inside the
このようにベローズ部21Cの内部の圧力が、所定の圧力になったか否かを監視し、第1アクチュエータ11を動かすタイミングを決定する場合には、ベローズ部21Cの内部の圧力が過剰にならずにすむ。
In this way, when the pressure inside the
なお、ステップS103においては、時間、長さ、圧力を全て監視して、全ての条件が充足された際に、ステップS104において、第1アクチュエータ11が動かされてもよい。
In step S103, the time, length, and pressure are all monitored, and when all the conditions are satisfied, the
また、上述の本実施の形態では、人が前屈姿勢および脚部の屈曲姿勢をとった際に、第2アクチュエータ21が動かされ、次に、第1アクチュエータ11が動かされ、次に、第3アクチュエータ31が動かされる。このタイミングは、例えば、図25(A)に示すように変更されてもよい。すなわち、図25(A)の例では、第1アクチュエータ11および第2アクチュエータ21が同じタイミングで動かされ、その後、第3アクチュエータ31が動かされている。また、参考として、図25(B)に示すように、第1アクチュエータ11、第2アクチュエータ21および第3アクチュエータ31が全て同じタイミングで動かされてもよい。
Further, in the above-described embodiment, when the person takes the forward bending posture and the bending posture of the leg, the
また、上述の実施の形態においては、人の前屈姿勢を検出する胴体姿勢検出センサ14および人の脚部の屈曲姿勢を検出する脚部姿勢検出センサ34の例として、筋電センサ、角度センサ、加速度センサ、歪みゲージ等を説明した。しかしながら、これらの他にも、手袋に設ける圧力センサや、足の圧力を検出する圧力センサ等も、人の姿勢を検出するセンサとして用いられ得る。圧力センサを用いた場合には、検出された圧力値から、補助ユニット10〜30の補助のための力が十分であるか否かが検出され得るため、圧力値に基づき、各補助ユニット10〜30に供給する空気量等を追加で供給したりすることにより、効果的な補助が実行され得る。また、筋電センサや加速度センサ等によっても、補助ユニット10〜30の補助のための力が十分であるか否かが検出され得る。
In the above-described embodiment, as an example of the body
1 筋力補助装置
10 第1補助ユニット
11 第1アクチュエータ
11A 第1身体側配置部
11B 第1外側配置部
14 胴体姿勢検出センサ
20 第2補助ユニット
21 第2アクチュエータ
21A 第2身体側配置部
21B 第2外側配置部
30 第3補助ユニット
31 第3アクチュエータ
31A 第3身体側配置部
31B 第3外側配置部
34 脚部姿勢検出センサ
40 制御ユニット
50 コントローラ
DESCRIPTION OF
Claims (6)
腰部に取り付けられる第2身体側配置部と前記第2身体側配置部に対して離接可能な第2外側配置部とを含み、前記第2身体側配置部および前記第2外側配置部間の距離を変化させることが可能な第2アクチュエータ、を有し、且つ前記第2外側配置部を前記第1外側配置部に取り付けられる第2補助手段と、
下半身に取り付けられる第3身体側配置部と前記第3身体側配置部に対して離接可能な第3外側配置部とを含み、前記第3身体側配置部および前記第3外側配置部間の距離を変化させることが可能な第3アクチュエータ、を有し、且つ前記第3外側配置部を前記第2外側配置部に取り付けられる第3補助手段と、
前記第1アクチュエータおよび第3アクチュエータの動作前に、前記第2アクチュエータの前記第2外側配置部が前記腰部から離れるように前記第2アクチュエータを動作させる制御装置と、を備え、
前記第2アクチュエータの前記第2身体側配置部および前記第2外側配置部間を結ぶ方向が前記第1アクチュエータの前記第1身体側配置部および前記第1外側配置部間を結ぶ方向と非平行となるように、身体の背部側において、前記第1補助手段が上半身に取り付けられ、且つ前記第2補助手段が腰部に取り付けられ、
前記第2アクチュエータの前記第2身体側配置部および前記第2外側配置部間を結ぶ方向が前記第3アクチュエータの前記第3身体側配置部および前記第3外側配置部間を結ぶ方向と非平行となるように、身体の背部側において、前記第3補助手段が下半身に取り付けられ、
前記制御装置は、状態監視手段を有し、当該状態監視手段によって前記第2アクチュエータの前記第2外側配置部が前記腰部から離れて所定の状態となったことを検出したときに、前記第1アクチュエータを、前記第1身体側配置部および前記第1外側配置部間の距離が短くなるように動作させ、その後、前記第3アクチュエータを、前記第3身体側配置部および前記第3外側配置部間の距離が短くまたは長くなるように動作させる、筋力補助装置。 A first body-side placement portion that is attached to the upper body and a first outer-side placement portion that is separable from the first body-side placement portion; and between the first body-side placement portion and the first outer-side placement portion First auxiliary means having a first actuator capable of changing the distance;
A second body side placement part attached to the waist and a second outer side placement part separable from the second body side placement part; between the second body side placement part and the second outer side placement part A second actuator having a second actuator capable of changing a distance, and attaching the second outer arrangement portion to the first outer arrangement portion;
A third body-side placement portion that is attached to the lower body and a third outer-side placement portion that is detachable from the third body-side placement portion, and is located between the third body-side placement portion and the third outer-side placement portion A third actuator capable of changing a distance, and third auxiliary means for attaching the third outer arrangement portion to the second outer arrangement portion;
A control device that operates the second actuator so that the second outer arrangement portion of the second actuator is separated from the waist before the operation of the first actuator and the third actuator;
The direction connecting the second body-side arrangement portion and the second outer arrangement portion of the second actuator is not parallel to the direction connecting the first body-side arrangement portion and the first outer arrangement portion of the first actuator. On the back side of the body, the first auxiliary means is attached to the upper body, and the second auxiliary means is attached to the waist,
The direction connecting the second body-side arrangement part and the second outer arrangement part of the second actuator is not parallel to the direction connecting the third body-side arrangement part and the third outer arrangement part of the third actuator. On the back side of the body, the third auxiliary means is attached to the lower body so that
The control device includes state monitoring means, and when the state monitoring means detects that the second outer arrangement portion of the second actuator is separated from the waist and is in a predetermined state, the first monitoring device The actuator is operated so that the distance between the first body side placement portion and the first outside placement portion is shortened, and then the third actuator is moved to the third body side placement portion and the third outside placement portion. A muscle strength assisting device that operates so that the distance between them becomes shorter or longer.
前記制御装置は、前記第3アクチュエータを、前記第3身体側配置部および前記第3外側配置部間の距離が短くなるように動作させる、請求項1に記載の筋力補助装置。 The third body side arrangement portion of the third actuator of the third auxiliary means is attached to the thigh of the lower body,
The muscle force assisting device according to claim 1, wherein the control device causes the third actuator to operate such that a distance between the third body side arrangement portion and the third outer arrangement portion becomes short.
前記制御装置は、前記状態監視手段によって前記所定時間の経過を検出したときに、前記第1アクチュエータを動作させ、その後、前記第3アクチュエータを動作させる、請求項1乃至3のいずれかに記載の筋力補助装置。 The state monitoring means is a time measuring means for monitoring whether or not a predetermined time has elapsed from the start of the operation of the second actuator;
4. The control device according to claim 1, wherein the control device operates the first actuator and then operates the third actuator when the state monitoring unit detects the elapse of the predetermined time. 5. Strength assist device.
前記制御装置は、前記状態監視手段によって前記所定の長さとなったことを検出したときに、前記第1アクチュエータを動作させ、その後、前記第3アクチュエータを動作させる、請求項1乃至3のいずれかに記載の筋力補助装置。 The state monitoring means monitors whether the distance between the second body side arrangement part and the second outer arrangement part of the second actuator has become a predetermined length,
4. The control device according to claim 1, wherein when the state monitoring unit detects that the predetermined length is reached, the control device operates the first actuator, and then operates the third actuator. 5. The muscular strength assisting device according to 1.
前記状態監視手段は、前記第2アクチュエータの前記弾性体の内部の圧力が所定の圧力となったか否かを監視し、
前記制御装置は、前記状態監視手段によって前記所定の圧力となったことを検出したときに、前記第1アクチュエータを動作させ、その後、前記第3アクチュエータを動作させる、請求項1乃至3のいずれかに記載の筋力補助装置。 The second actuator connects the second body-side placement portion, the second outer placement portion, the second body-side placement portion, and the second outer placement portion, and forms a fluid inflow space therein. And changing the distance between the second body side arrangement part and the second outer arrangement part by switching the injection and discharge of the fluid to and from the inside of the elastic body. And
The state monitoring means monitors whether or not the pressure inside the elastic body of the second actuator has become a predetermined pressure,
4. The control device according to claim 1, wherein when the state monitoring unit detects that the predetermined pressure is reached, the control device operates the first actuator, and then operates the third actuator. 5. The muscular strength assisting device according to 1.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015043898A JP6490455B2 (en) | 2015-03-05 | 2015-03-05 | Strength assist device |
| PCT/JP2016/056889 WO2016140363A1 (en) | 2015-03-05 | 2016-03-04 | Muscular strength assistance device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015043898A JP6490455B2 (en) | 2015-03-05 | 2015-03-05 | Strength assist device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016159109A true JP2016159109A (en) | 2016-09-05 |
| JP6490455B2 JP6490455B2 (en) | 2019-03-27 |
Family
ID=56843722
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015043898A Active JP6490455B2 (en) | 2015-03-05 | 2015-03-05 | Strength assist device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6490455B2 (en) |
| WO (1) | WO2016140363A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017148488A (en) * | 2016-02-19 | 2017-08-31 | 学校法人法政大学 | Movement assist suits and movement assist device |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11141304B1 (en) | 2016-11-28 | 2021-10-12 | Donggwan PARK | Device for assisting human body bending/stretching using elastic body |
| JP6774342B2 (en) * | 2017-01-20 | 2020-10-21 | 芦森工業株式会社 | Pressure actuator and lumbar assist device |
| CN108356798A (en) * | 2018-02-23 | 2018-08-03 | 北京京东方光电科技有限公司 | Waist power assisting device |
| JP2020082222A (en) * | 2018-11-16 | 2020-06-04 | 株式会社ブリヂストン | Human wearable power assist device |
| JP7552006B2 (en) * | 2019-09-17 | 2024-09-18 | 株式会社ジェイテクト | Assist Device |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000051289A (en) * | 1998-08-14 | 2000-02-22 | Koganei Corp | Muscular power assisting device for caring and pneumatic actuator to be used for it |
| JP2003265548A (en) * | 2002-03-13 | 2003-09-24 | Denki Kosakugyo No Suzuki:Kk | Body worn booster |
| JP2005192764A (en) * | 2004-01-07 | 2005-07-21 | Japan Science & Technology Agency | Lumbar burden alleviation tool |
| JP2007282991A (en) * | 2006-04-19 | 2007-11-01 | Ihi Corp | Lumbar region support device |
| WO2011036906A1 (en) * | 2009-09-28 | 2011-03-31 | 学校法人東京理科大学 | Lumbar support device |
| JP2013022708A (en) * | 2011-07-25 | 2013-02-04 | Oita Univ | Tool for reducing burden on lumbar area |
| JP2013075078A (en) * | 2011-09-30 | 2013-04-25 | Tokyo Univ Of Science | Back assist device |
| US20130303950A1 (en) * | 2010-04-09 | 2013-11-14 | Ekso Bionics | Exoskeleton Load Handling System and Method of Use |
| JP2015039414A (en) * | 2013-08-20 | 2015-03-02 | 国立大学法人富山大学 | Back muscle motion assisting device |
-
2015
- 2015-03-05 JP JP2015043898A patent/JP6490455B2/en active Active
-
2016
- 2016-03-04 WO PCT/JP2016/056889 patent/WO2016140363A1/en active Application Filing
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000051289A (en) * | 1998-08-14 | 2000-02-22 | Koganei Corp | Muscular power assisting device for caring and pneumatic actuator to be used for it |
| JP2003265548A (en) * | 2002-03-13 | 2003-09-24 | Denki Kosakugyo No Suzuki:Kk | Body worn booster |
| JP2005192764A (en) * | 2004-01-07 | 2005-07-21 | Japan Science & Technology Agency | Lumbar burden alleviation tool |
| JP2007282991A (en) * | 2006-04-19 | 2007-11-01 | Ihi Corp | Lumbar region support device |
| WO2011036906A1 (en) * | 2009-09-28 | 2011-03-31 | 学校法人東京理科大学 | Lumbar support device |
| US20130303950A1 (en) * | 2010-04-09 | 2013-11-14 | Ekso Bionics | Exoskeleton Load Handling System and Method of Use |
| JP2013022708A (en) * | 2011-07-25 | 2013-02-04 | Oita Univ | Tool for reducing burden on lumbar area |
| JP2013075078A (en) * | 2011-09-30 | 2013-04-25 | Tokyo Univ Of Science | Back assist device |
| JP2015039414A (en) * | 2013-08-20 | 2015-03-02 | 国立大学法人富山大学 | Back muscle motion assisting device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017148488A (en) * | 2016-02-19 | 2017-08-31 | 学校法人法政大学 | Movement assist suits and movement assist device |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016140363A1 (en) | 2016-09-09 |
| JP6490455B2 (en) | 2019-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6564586B2 (en) | Strength assist device | |
| WO2016140361A1 (en) | Muscular strength assistance device | |
| JP6490455B2 (en) | Strength assist device | |
| JP6400530B2 (en) | Prosthetic knee joint and its control method | |
| EP2484317B1 (en) | Lumbar support device | |
| JP4712627B2 (en) | Walking assist device | |
| US10792211B2 (en) | Assist device, assist method, and recording medium | |
| JP2009213538A (en) | Assisting brace and its control method | |
| JP2008067762A (en) | Muscular support apparatus | |
| JP6086603B2 (en) | Joint motion assist device | |
| JP6710029B2 (en) | Actuator and body support device | |
| JP2018083275A (en) | Motion assist device | |
| WO2018105430A1 (en) | Muscle strength-assisting device | |
| US20220008280A1 (en) | Body mounting type power assist device | |
| JP2018197029A (en) | Vehicle seat | |
| KR101353974B1 (en) | supporting aid for leg, and operation method thereof | |
| JP6635430B2 (en) | Thigh lifting support device | |
| CN108356798A (en) | Waist power assisting device | |
| JP6409343B2 (en) | Walking training device | |
| JP6849192B2 (en) | Muscle strength assisting device and operating device | |
| JPWO2018168817A1 (en) | Operation assist device | |
| JP2005058660A5 (en) | ||
| JP4724059B2 (en) | Walking assist device | |
| JP2001276100A (en) | Muscular force assisting device of mounting on body type |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20161129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6490455 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |