JP2012252501A - 走行路認識装置及び走行路認識用プログラム - Google Patents
走行路認識装置及び走行路認識用プログラム Download PDFInfo
- Publication number
- JP2012252501A JP2012252501A JP2011124396A JP2011124396A JP2012252501A JP 2012252501 A JP2012252501 A JP 2012252501A JP 2011124396 A JP2011124396 A JP 2011124396A JP 2011124396 A JP2011124396 A JP 2011124396A JP 2012252501 A JP2012252501 A JP 2012252501A
- Authority
- JP
- Japan
- Prior art keywords
- image processing
- moving body
- speed
- processing area
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Landscapes
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Abstract
【課題】高度な計算処理能力を有しない低廉な装置であっても走行車線上の標示線を遠方まで高精度で検出する。
【解決手段】領域解像度設定部16が、外界撮像部11が撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、移動体運動情報取得部14が取得した移動体の速度情報が示す移動体の速度が所定値以上の場合に、移動体の速度が速くなるに従って位置が第1画像処理領域より徐々に遠方となり、かつ移動体の速度が速くなるに従って大きさが第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定し、領域解像度設定部16で設定された画像処理領域から標示線を検出する。
【選択図】図1
【解決手段】領域解像度設定部16が、外界撮像部11が撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、移動体運動情報取得部14が取得した移動体の速度情報が示す移動体の速度が所定値以上の場合に、移動体の速度が速くなるに従って位置が第1画像処理領域より徐々に遠方となり、かつ移動体の速度が速くなるに従って大きさが第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定し、領域解像度設定部16で設定された画像処理領域から標示線を検出する。
【選択図】図1
Description
本発明は、走行路認識装置及び走行路認識用プログラムに関する。
走行車線上を車両又はロボット等の移動体が走行している場合に、移動体の走行方向前方を移動体側から撮像した画像から走行車線の通行区分を標示する標示線を検出することにより、移動体が現在位置より走行する走行車線を認識する装置及びプログラムが知られている。この装置が認識した走行車線に関する情報は、移動体の走行車線維持動作を実現する運転支援システムに用いられる他、走行車線の情報に基づいて移動体の横変位を検出し、検出された横変位に基づいて移動体が走行車線を逸脱する傾向にあるか否かを判定する場合等に用いられる。
上記の走行車線を認識するには、移動体の近傍から遠方まで出来るだけ高解像度の画像を使用して前述の標示線を検出することが望ましい。しかしながら、高解像度の画像を処理するには高度な計算処理能力を有する画像処理装置が必要であり、かかる高度な計算処理能力を有する画像処理装置はコストが高く、かつ信頼性にも不安がある。そのため、高度な画像処理能力を有する画像処理装置を量産車に車載することは困難である、という問題があった。
特許文献1には、移動体前方近傍だけでなく、遠方を高精細に撮影すべく、移動体近傍を撮像する低倍率の光学系と遠方を撮像する高倍率の光学系の2系統の撮像素子を備え、各々の光学系で得られた画像から走行車線を認識する走行路認識装置が開示されている。
また、特許文献2には、広い視野を確保した1系統の光学系において、画像拡大処理手段により遠方の車線を含む画像を拡大した上で計算処理を行い、移動体近傍のみならず遠方も含む走行車線を推定する走行車線認識装置が開示されている。
しかしながら、特許文献1に開示されている走行路認識装置は、低倍率の光学系と高倍率の光学系との2系統の撮像素子を要するために、装置自体が大きくなり車載が困難であることと、装置のコストが高いという問題があった。
また、特許文献2に開示されている走行車線認識装置は、撮像した画像の遠方部分を拡大し、拡大した遠方部分に係る画像に基づいて走行車線を推定しているが、画像の一部分を拡大しても、画像の解像度自体は向上しないので、結局は走行車線の精密な推定は困難であるという問題があった。
さらには、特許文献2には、撮像した画像と、当該画像の遠方部分を拡大した画像とを各々どのような場合に使い分けるのかが明確に記載されておらず、特許文献2に記載のままでは、2種類の画像を常時計算処理の対象とすることとなり、無駄な計算処理が実行されてしまうというおそれもあった。
本発明は上記に鑑みてなされてもので、高度な計算処理能力を有しない低廉な装置であっても走行車線上の標示線を遠方まで高精度で検出できる走行路認識装置及び走行路認識用プログラムを提供することを目的とする。
上記目的を達成するために、本発明の走行路認識装置は、移動体が走行する走行路を含む移動体の前方の領域を撮像する撮像手段と、前記移動体の速度を示す速度情報を取得する速度情報取得手段と、前記撮像手段が撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、前記速度情報で示される前記移動体の速度が所定値以上の場合に、前記速度が速くなるに従って位置が前記第1画像処理領域より徐々に遠方となり、かつ前記速度が速くなるに従って大きさが前記第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定する領域設定手段と、前記領域設定手段で設定された画像処理領域から前記標示線を検出する標示線検出手段と、含んで構成されている。
本発明の走行路認識装置によれば、移動体に搭載された撮像手段が移動体の走行する走行路を含む移動体の前方の領域を撮像し、速度情報取得手段が移動体の速度を示す速度情報を取得する。そして、領域設定手段が、撮像手段が撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、速度情報で示される移動体の速度が所定値以上の場合に、速度が速くなるに従って位置が第1画像処理領域より徐々に遠方となり、かつ速度が速くなるに従って大きさが第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定する。さらに、標示線検出手段が領域設定手段で設定された画像処理領域から標示線を検出する。
このように、移動体の速度が大きくなるにつれて、標示線を検出するための画像処理領域を、移動体近傍から遠方に向かって設定し、かつ遠方の画像処理領域ほど領域を小さく設定することにより、高度な計算処理能力を有しない低廉な装置であっても走行車線上の標示線を遠方まで高精度で検出することができる。
また、本発明の走行路認識装置は、移動体に近い画像処理領域ほど解像度を低下させることができる。
このように、移動体に近い画像処理領域ほど解像度を低下させることにより、高度な計算処理能力を有しない低廉な装置であっても走行車線上の標示線を検出することができる。
また、本発明の走行路認識装置は、前記領域設定手段は、前記第1画像処理領域から検出された標示線に基づいて前記走行路及び前記走行路を定める標示線が収束する消失点の座標を算出し、該消失点の座標と前記第1画像処理領域の位置とに基づいて前記第2画像処理領域の位置を決定し、前記第2画像処理領域を設定することができる。
このように、第1画像処理領域から検出された標示線に基づいて走行路及び走行路を定める標示線が収束する消失点の座標を算出し、当該消失点を移動体の速度に応じて第2画像処理領域の位置を設定する際に用いることができる。
また、本発明の走行路認識プログラムは、コンピュータを、移動体が走行する走行路を含む移動体の前方の領域を撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、前記移動体の速度が所定値以上の場合に、前記速度が速くなるに従って位置が前記第1画像処理領域より徐々に遠方となり、かつ前記速度が速くなるに従って大きさが前記第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定する領域設定手段、及び前記領域設定手段で設定された画像処理領域から前記標示線を検出する標示線検出手段として機能させるためのプログラムである。
以上説明したように、本発明の走行路認識装置及び走行路認識用プログラムによれば、高度な計算処理能力を有しない低廉な装置であっても走行車線上の標示線を遠方まで高精度で検出できるという効果が得られる。
[第1の実施の形態]
以下、図面を参照して本発明の第1の実施の形態を詳細に説明する。図1は、本発明の第1の実施の形態に係る走行路認識装置の要部構成を示すブロック図である。
以下、図面を参照して本発明の第1の実施の形態を詳細に説明する。図1は、本発明の第1の実施の形態に係る走行路認識装置の要部構成を示すブロック図である。
図1に示すように、本実施の形態の走行路認識装置1は、移動体が走行していく方向、すなわち前方を、当該移動体側から連続的に撮像する外界撮像部11を備えている。外界撮像部11は、外界撮像部11が撮像して得た画像信号をデジタル信号であるデジタル画像に変換する画像入力部12に接続されている。
画像入力部12は、デジタル画像の解像度を所定の解像度まで低解像度化し、当該低解像度化されたデジタル画像の画像データを用いて、移動体の前方かつ近傍に係る領域における標示線を検出する基準標示線検出部13に接続されている。
また、本実施の形態に係る走行路認識装置は、移動体の図示していない制御装置(ECU)等に接続され、当該移動体の速度を示す速度情報を取得する移動体運動情報取得部14を備えている。
移動体運動情報取得部14から速度情報を取得し、移動体の速度が所定の閾値を超えた場合に、当該閾値に応じてデジタル画像の解像度を変更し、解像度を変更したデジタル画像上に移動体の前方かつ近傍に係る領域よりも遠方に係る領域を設定する領域解像度選択部16が、画面入力部12、基準標示線検出部13及び移動体運動情報取得部14に接続されている。
さらには、領域解像度選択部16に接続され、領域解像度選択部16が設定した領域において標示線を検出し、当該検出した標示線と基準標示線検出部13が検出した標示線とに基づいて走行車線の幅である車線幅、移動体の姿勢角、走行車線の曲率である横断曲率及び走行車線における移動体の左右方向の位置を示す横変位等の走行車線パラメータを推定する走行車線パラメータ検出部17を有している。
図2は、外界撮像部11が取得した画像の一例を示す図である。図2には、左走行車線21の左端部を区切る左標示線23、右走行車線22の右端部を区切る右標示線24及び左走行車線21と右走行車線22とを区切る破線状の中央標示線25が示されており、図2において最も遠方を示す領域は、左走行車線21、左標示線23、中央標示線25、右走行車線22及び右標示線24が一点に収束する消失点26となっている。
図2は、走行車線が直線状を呈する場合を示しており、外界撮像部11を搭載した移動体は右走行車線22上を消失点26に向かって走行している状態での画像を示している。
図2のような画像を取得するために、本実施の形態に係る外界撮像部11は、移動体の前方を広範囲に撮像できる装置であることが望ましく、例えば、CCDカメラ又はCMOSカメラ等が特に好ましい。
画像入力部12は、外界撮像部11が撮像によって生成したアナログ信号である画像信号をデジタル信号に変換し、このデジタル信号に対しガンマ補正、画像濃度の調整及びノイズ除去等の所定の画像処理を施してデジタル画像である原画像を生成する。
原画像の解像度は、外界撮像部11の光学系の性能及び撮像素子の画素数等によって左右されるが、本実施の形態では遠方の標示線まで高精細に記録することが必要であることから、できるだけ高解像度であることが好ましい。
本実施の形態では、一例として、原画像の解像度を横1280画素及び縦1024画素としたが、かかる解像度に限定されるわけではなく、原画像の解像度をより高解像度に設定してもよいし、横1280画素未満又は縦1024画素未満の解像度であってもよい。
なお、本実施の形態では、画像入力部12、基準標示線検出部13、領域解像度選択部16及び走行車線パラメータ検出部17を、外界撮像部11から取得した画像信号と移動体運動情報取得部14から取得した移動体の速度情報とから、走行車線パラメータを推定するコンピュータとしてもよい。
当該コンピュータは、本実施の形態に係る走行路認識装置全体の制御を司るCPU、走行車線パラメータを推定するプログラム等を記憶した記憶媒体としてのROM、ワークエリアとしてデータを一時格納するRAM、及びこれらを接続するバスを含んで構成されている。このような構成の場合には、各構成要素の機能を実現するためのプログラムをROMやHDD等の記憶媒体に記憶しておき、これをCPUが実行することによって、各機能が実現されるようにする。
次に図3を用いて本実施の形態におけるプログラムに基づいてCPUによって行われる一連の処理を説明する。図3は、本実施の形態に係る走行路認識装置におけるプログラムの処理のフローチャートである。
まずステップ3001において、画像入力部12が、外界撮像部11が撮像した画像信号を、外界撮像部11から取得する。
上述のように、取得した画像信号はアナログ信号であるので、画像入力部12は、ステップ3002において、当該画像信号をデジタル信号に変換し、さらに当該デジタル信号に対しガンマ補正、画像濃度の調整及びノイズ除去等の所定の画像処理を施して原画像を生成する。
ステップ3003では、基準標示線検出部13が画像入力部12から原画像を取得し、当該取得した原画像の画素を間引いて、原画像を所定の解像度まで低解像度化する。原画像を低解像度化するのは画像処理を簡易迅速に行うためである。前述のようにコスト及び信頼性の面から無制限に高性能な画像処理装置を車載することはできないため、画像処理の能力がそれほど高度ではない装置であっても迅速に処理できるように原画像の解像度を低下させる。
原画像を低解像度化すると、原画像の情報量も低下する。しかしながら、後述するように基準標示線検出部13では、移動体の前方かつ近傍に係る領域、すなわち外界撮像部11に最も近い領域を第1の画像処理領域とし、この第1の画像処理領域から標示線を検出する。外界撮像部11に最も近い領域には走行車線の状態が大きく明りょうに写っているので、画像の解像度が多少低下していても、標示線を検出することは可能であり、低解像度化によって画素が間引かれているので、画像処理を簡易迅速に行うことが可能となる。
このステップ3003において、本実施の形態では、例えば、並列した4本の画素のラインから3本のラインを間引き、さらに間引かれなかった画素のラインにおいて、連続している4つの画素から3つの画素を間引く処理によって、原画像の画素数を縦横各々で1/4に減らし、原画像に対して総画素数が1/16となるように画像を低解像度化している。
本実施の形態のように縦横の画素数を原画像に対して各々1/4とする以外にも1/2、1/3又は1/8等、標示線を検出可能な程度に原画像の解像度を変更してもよい。
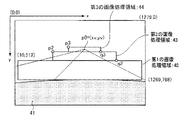
続くステップ3004では、ステップ3003で低解像度化した画像において、標示線を検出する第1の画像処理領域を設定する。第1の画像処理領域の設定は、具体的には図4に示したように行う。図4は、本発明の第1の実施の形態に係る走行路認識装置による画像処理領域の設定の一例を示す図である。
本実施の形態では、ステップ3003において原画像は縦横の画素数が原画像に対して各々1/4となるように低解像度化されている。しかしながら、後述する第2の画像処理領域43及び第3の画像処理領域44との関係を把握しやすいように、図4では低解像度化しない原画像上で、第1の画像処理領域42の設定について説明する。
図4は、原画像の解像度が横1280画素及び縦1024画素である場合に、原画像の左上を原点として横方向にx軸、縦方向にy軸を設定し、原画像の各画素の位置をx座標は0〜1279、y座標は0〜1023の範囲で表したものである。なお、図4の下部を占める黒い領域は、外界撮像部11を搭載した移動体41が撮影された部分である。
ステップ3004において設定される第1の画像処理領域42は、図4では、左上の座標値を(10、512)、右下の座標値を(1269、768)とした矩形の領域としている。これら左上の座標値(10、512)及び右下の座標値(1269、768)は任意の値である。標示線が検出できるように、走行路の左の標示線及び前記走行路の右の標示線が含まれる移動体の前方かつ近傍に係る領域であれば、左上の座標値及び右下の座標値は適宜変更してよい。
なお、前述のように、第1の画像処理領域42における左上の座標値(10、512)及び右下の座標値(1269、768)は、解像度を低下させていない原画像における座標値である。本実施の形態では、ステップ3003において、原画像の解像度を縦横の画素数が原画像に対して各々1/4となるように低下させているので、当該解像度を低下させた画像では、実際には各画素の位置がx座標は0〜319、y座標は0〜255の範囲で表わされ、第1の画像処理領域42における左上の座標値は(2、128)及び右下の座標値は(317、197)となる。
ステップ3005では、第1の画像処理領域42から走行車線の標示線を検出する。本実施の形態では、第1の画像処理領域42の特徴量を抽出することによって、走行車線の標示線を検出している。本実施の形態での特徴量とは標示線の輪郭(エッジ)を示す輪郭情報等であり、当該輪郭情報は、例えば第1の画像処理領域42を構成する画素の輝度値が急激に変化している位置を検出することによって抽出できる。
第1の画像処理領域42において、標示線の部分を構成する画素は白色に近い色を呈するので輝度値が高いが、走行車線の部分を構成する画素は灰色を呈し、標示線の部分を構成する画素に比して輝度値が低い。そのため、標示線の輪郭を示す部分では、画素の輝度値が大きく変化している。
この輪郭情報を抽出するには、上記のように画素の輝度値が大きく変化している位置を検出するエッジフィルタの1つであるSobelフィルタを用いればよい。又は、輪郭情報を抽出するその他の公知の画像処理手法を用いてもよい。
なお、ステップ3005では、図2のように左走行車線21の左端部を区切る左標示線23、右走行車線22の右端部を区切る右標示線24及び左走行車線21と右走行車線22とを区切る破線状の中央標示線25が存在する場合、左標示線23、右標示線24又は中央標示線25に相当する複数の標示線が検出される。また、走行車線が1つのみの場合であっても、左標示線と右標示線とを有している場合が多く、これら複数の標示線が検出される。
ステップ3006では、ステップ3005において第1の画像処理領域42で検出した複数の標示線を原画像上の対応する座標にプロットし、さらに各々の標示線を遠方の領域に向けて延長し、一点に収束する消失点p0の座標値(xv、yv)を算出する。
前述のように第1の画像処理領域42は、ステップ3003において縦横の画素数が原画像に対して各々1/4となるように解像度を低下させた画像で設定されているので、以下の式(1)及び(2)を用いて当該解像度を低下させた画像上での座標値を原画像上での座標値に補正できる。
(ステップ3003で解像度を低下させた画像上でのx座標値)*4
=(原画像上でのx座標値)・・・(1)
(ステップ3003で解像度を低下させた画像上でのy座標値)*4
=(原画像上でのy座標値)・・・(2)
(ステップ3003で解像度を低下させた画像上でのx座標値)*4
=(原画像上でのx座標値)・・・(1)
(ステップ3003で解像度を低下させた画像上でのy座標値)*4
=(原画像上でのy座標値)・・・(2)
ステップ3007では、領域解像度選択部16が、移動体運動情報取得部14から移動体の現在の速度を示す速度情報を取得し、当該速度が予め定められた第1の速度閾値v1以上か否かを判断する。この第1の速度閾値v1は、例えば、30〜40km/h程度の、一般道を走行する場合を想定した速度域としてよい。
移動体の現在の速度が第1の速度閾値v1以上の場合は、ステップ3008において、領域解像度選択部16が、原画像の低解像度化を行う。ただし、後述するステップ3010では、ステップ3005の場合よりも遠方に係る領域で標示線を検出する必要があるため、解像度は原画像よりも低下させるが、ステップ3003の場合よりも高解像度であるようにする。
本実施の形態では、ステップ3008において、原画像の画素の縦横各々のラインにおいて、画素を1画素間隔で間引く処理により、原画像の画素数を縦横各々で1/2に減らし、原画像に対して総画素数が1/4となるように画像を低解像度化している。
本実施の形態のように縦横各々1/2以外にも1/3又は1/4等、標示線を検出可能な程度に原画像の解像度を変更してもよい。
続くステップ3009では、ステップ3008で低解像度化した画像において、標示線を検出する第2の画像処理領域43を設定する。画像処理領域の設定は、具体的には図4に示したように行う。
図4では、第1の画像処理領域42に近接した矩形状の第2の画像処理領域43が設定されている。この第2の画像処理領域43は、左上の頂点であるp2と右下の頂点であるq2とで定義される。
第2の画像処理領域43を定義するp2及びq2を決定する方法は種々考えられるが、本実施の形態では、ステップ3006で算出した消失点p0の座標値xv及びyvと、以下の式(3)及び(4)を用いて決定する。
p2=(xv−1280/4、yv+(512−yv)/5) ・・・(3)
q2=(xv+1280/4、512) ・・・(4)
p2=(xv−1280/4、yv+(512−yv)/5) ・・・(3)
q2=(xv+1280/4、512) ・・・(4)
p2のx座標値を示す「xv−1280/4」は、消失点p0のx座標値であるxvから原画像のx軸(左右)方向の画素数である1280の1/4に相当する画素の分だけx座標値を左方向にシフトさせることを意味する。
その反対に、q2のx座標値を示す「xv+1280/4」は、消失点p0のx座標値であるxvから原画像のx軸方向の画素数である1280の1/4に相当する画素の分だけx座標値を右方向にシフトさせることを意味する。
すなわち、上記の式(3)及び(4)では、第2の画像処理領域43の横幅は、第2の画像処理領域43の各画素を原画像の各画素に対応させた場合、原画像の横幅の1/2になるように、第2の画像処理領域43の左上の頂点であるp2のx座標値と右下の頂点であるq2のx座標値とを定義している。
また、q2のy座標値を示す「512」は、第1の画像処理領域42の上部の辺のy座標値と同一である。第2の画像処理領域43は第1の画像処理領域42と近接していることが好ましいので、本実施の形態では、第2の画像処理領域43の右下の頂点であるq2のy座標値は、第1の画像処理領域42の上部の辺のy座標値に一致させている。
p2のy座標値を示す「yv+(512−yv)/5」は、消失点p0から第1の画像処理領域42の上部の辺までの距離の1/5に相当する距離で、消失点p0のy座標値を下方向にシフトさせることを意味する。
以上、第2の画像処理領域43の左上の頂点であるp2と右下の頂点であるq2とを定義する式(3)及び(4)について述べたが、上記の式(3)及び(4)のように、第2の画像処理領域43の原画像における横幅を原画像の横幅の1/2とすること、及びp2のy座標値を、消失点p0から第1の画像処理領域42の上部の辺までの距離の1/5に相当する距離で、消失点p0のy座標値を下方向にシフトさせて定義することは一例であり、外界撮像部のレンズの画角、外界撮像部を移動体に設置したときのピッチ角等の外界撮像部の設置角度に係るパラメータ、外界撮像部の解像度等の性能又は原画像のアスペクト比によって適宜変更し得るものである。
標示線が検出できるように、走行路の左の標示線及び前記走行路の右の標示線が含まれる領域であって、かつ第1の画像処理領域42よりも遠方の領域になれば、上記の式(3)及び(4)を用いる方法以外によって第2の画像処理領域43を決定してもよい。
なお、上記の式(3)及び(4)で算出される座標値は原画像上のものである。従って、原画像の画素数を縦横各々で1/2に減らした画像では、上記の式(3)及び(4)で算出された座標値の1/2の値が、当該画像での画素の位置に対応した座標値となる。
ステップ3010では、第2の画像処理領域43から走行車線の標示線を検出する。ステップ3010では、ステップ3005と同様に、第2の画像処理領域43を構成する画素の輝度値が急激に変化している位置を検出するエッジフィルタの1つであるSobelフィルタ、又は、輪郭情報を抽出するその他の公知の画像処理手法を用いることによって、標示線を検出する。
ステップ3011では、領域解像度選択部16が、移動体運動情報取得部14から移動体の現在の速度を示す速度情報を取得し、当該速度が予め定められた第2の速度閾値v2以上か否かを判断する。この第2の速度閾値v2は、第1の速度閾値v1より大きな値であり(v2>v1)、例えば、60〜100km/h程度の、自動車専用道を走行する場合を想定した速度域としてよい。
移動体の現在の速度が第2の速度閾値v2以上の場合は、ステップ3012において、標示線を検出する第3の画像処理領域44を設定する。この第3の画像処理領域44は、走行車線の最も遠方に係る領域であるため、前述の第1の画像処理領域42及び第2の画像処理領域43のように、原画像の解像度を低下させず、解像度を変更しない原画像において画像処理の対象となる領域を設定する。
ステップ3012における画像処理領域の設定は、具体的には図4に示したように行う。図4では、第2の画像処理領域43に近接した矩形状の第3の画像処理領域44が設定されている。この第3の画像処理領域44は、左上の頂点であるp3と右下の頂点であるq3とで定義される。
第3の画像処理領域44を定義するp3及びq3を決定する方法は種々考えられるが、本実施の形態では、ステップ3006で算出した消失点p0の座標値xv及びyvと、以下の式(5)及び(6)を用いて決定する。
p3=(xv−640/4、yv−(512−yv)/5) ・・・(5)
q3=(xv+640/4、yv+(512−yv)/5) ・・・(6)
p3=(xv−640/4、yv−(512−yv)/5) ・・・(5)
q3=(xv+640/4、yv+(512−yv)/5) ・・・(6)
p3のx座標値を示す「xv−640/4」は、消失点p0のx座標値であるxvから原画像のx軸(左右)方向の画素数である1280の1/8に相当する画素の分だけx座標値を左方向にシフトさせることを意味する。
その反対に、q3のx座標値を示す「xv+640/4」は、消失点p0のx座標値であるxvから原画像のx軸方向の画素数である1280の1/8に相当する画素の分だけx座標値を右方向にシフトさせることを意味する。
すなわち、上記の式(5)及び(6)では、第3の画像処理領域44の横幅は、原画像の横幅の1/4になるように、第3の画像処理領域44の左上の頂点であるp3のx座標値と右下の頂点であるq3のx座標値とを定義している。
また、q3のy座標値を示す「yv+(512−yv)/5」は、第2の画像処理領域43の上部の辺のy座標値と同一である。第3の画像処理領域44は、第2の画像処理領域43に近接していることが好ましいので、本実施の形態では、第3の画像処理領域44の右下の頂点であるq3のy座標値は、第2の画像処理領域43の上部の辺のy座標値に一致させている。
p3のy座標値を示す「yv−(512−yv)/5」は、消失点p0から第1の画像処理領域42の上部の辺までの距離の1/5に相当する距離で、消失点p0のy座標値を上方向にシフトさせることを意味する。
以上、第3の画像処理領域44の左上の頂点であるp3と右下の頂点であるq3とを定義する式(5)及び(6)について述べたが、上記の式(5)及び(6)のように、第3の画像処理領域44の横幅を原画像の横幅の1/4とすること、及びp3のy座標値を、消失点p0から第1の画像処理領域42の上部の辺までの距離の1/5に相当する距離で、消失点p0のy座標値を上方向にシフトさせて定義することは一例であり、外界撮像部のレンズの画角、外界撮像部を移動体に設置したときのピッチ角等の外界撮像部の設置角度に係るパラメータ、外界撮像部の解像度等の性能又は原画像のアスペクト比によって適宜変更し得るものである。
標示線が検出できるように、走行路の左の標示線及び前記走行路の右の標示線が含まれる領域であって、かつ第2の画像処理領域43よりも遠方の領域になれば、上記の式(5)及び(6)を用いる方法以外によって第3の画像処理領域44を決定してもよい。
ステップ3013では、第3の画像処理領域44から走行車線の標示線を検出する。ステップ3013では、ステップ3005と同様に、第3の画像処理領域44を構成する画素の輝度値が急激に変化している位置を検出するエッジフィルタの1つであるSobelフィルタ、又は、輪郭情報を抽出するその他の公知の画像処理手法を用いることによって、標示線を検出する。
ステップ3014では、ステップ3005、ステップ3010及びステップ3013で検出した標示線に基づいて走行車線パラメータを推定する。本実施の形態で推定する走行車線パラメータは、図5に示すように、走行車線の幅である車線幅、移動体の姿勢角、走行車線の曲率である横断曲率及び走行車線における移動体の左右方向の位置を示す横変位等である。
また、ステップ3007において移動体の現在の速度が第1の速度閾値v1未満の場合は、ステップ3005で検出した標示線に基づいて、ステップ3011において移動体の現在の速度が第2の速度閾値v2未満の場合は、ステップ3005及びステップ3010で検出した標示線に基づいて、ステップ3014において各々の走行車線パラメータを推定する。
前述のように、ステップ3005で検出した標示線は、原画像の縦横の画素数を1/4に低下させた画像における第1の画像処理領域42において検出したものであり、ステップ3010で検出した標示線は、原画像の縦横の画素数を1/2に低下させた画像における第2の画像処理領域43において検出したものである。
従って、ステップ3005、ステップ3010及びステップ3013で検出した標示線に基づいて走行車線パラメータを推定する場合は、以下の式(7)〜(10)を用いてステップ3005で検出した標示線の座標値と、ステップ3010で検出した標示線の座標値とを補正をした上で、ステップ3013で検出した標示線と共に走行車線パラメータの推定に用いる。
(ステップ3005で検出した標示線のx座標値)*4
=(原画像上でのx座標値)・・・(7)
(ステップ3005で検出した標示線のy座標値)*4
=(原画像上でのy座標値)・・・(8)
(ステップ3010で検出した標示線のx座標値)*2
=(原画像上でのx座標値)・・・(9)
(ステップ3010で検出した標示線のy座標値)*2
=(原画像上でのy座標値)・・・(10)
(ステップ3005で検出した標示線のx座標値)*4
=(原画像上でのx座標値)・・・(7)
(ステップ3005で検出した標示線のy座標値)*4
=(原画像上でのy座標値)・・・(8)
(ステップ3010で検出した標示線のx座標値)*2
=(原画像上でのx座標値)・・・(9)
(ステップ3010で検出した標示線のy座標値)*2
=(原画像上でのy座標値)・・・(10)
ステップ3014における走行車線パラメータの推定に係る処理については種々の方法が考えられるが、本実施の形態では、特許第4263660号公報に開示されている技術によるものとし、その説明を省略する。
本実施の形態では、移動体の現在の速度に応じて第1の画像処理領域42、第2の画像処理領域43及び第3の画像処理領域44というように、3段階で標示線を検出する画像処理領域を設定したが、原画像の解像度、移動体の速度又は走行車線の制限速度等に応じて、標示線を検出する画像処理領域を2段階で設定してもよいし、4段階以上で標示線を検出する画像処理領域を設定してもよい。
本実施の形態では、ステップ3003及びステップ3004、並びにステップ3008及びステップ3009において、原画像の解像度を低下させてから第1の画像処理領域42及び第2の画像処理領域43を設定したが、原画像上において第1の画像処理領域42及び第2の画像処理領域43を設定し、設定した各々の領域において解像度を低下させてもよい。
なお、本実施の形態では、第1の画像処理領域42、第2の画像処理領域43及び第3の画像処理領域44を矩形領域として設定したが、上底に比して下底が長い台形上の領域として設定してもよい。
以上説明したように、本実施の形態によれば、移動体の現在の速度が第1の速度閾値v1未満となる低速の場合は、解像度を低下させた画像上に移動体近傍の領域を設定し、当該領域おいて標示線を検出することから、画像処理能力が限られている車載の装置でも標示線を簡易迅速に検出でき、当該移動体の現在の速度が増大した場合は、移動体近傍の領域のさらに遠方に相当する画像の部分に、当該移動体近傍の領域よりも狭い領域であって、解像度が当該移動体近傍の領域よりも高い領域を設定し、当該領域において標示線を検出するので、画像処理能力が限られた車載の装置でも標示線を遠方まで高精度で検出することが可能となる。
[第2の実施の形態]
以下、図面を参照して本発明の第2の実施の形態を詳細に説明する。図6は、本発明の第2の実施の形態に係る走行路認識装置の要部構成を示すブロック図である。
以下、図面を参照して本発明の第2の実施の形態を詳細に説明する。図6は、本発明の第2の実施の形態に係る走行路認識装置の要部構成を示すブロック図である。
図6に示すように、本実施の形態の走行路認識装置2は、第1の実施の形態に係る走行路認識装置1に対して、移動体自身の前方を走行中の他の移動体の存在を検出する移動体検出部15を有する点が相違するが、その他の構成は第1の実施の形態に係る走行路認識装置1と同一であるので説明を省略する。
図7は、本発明の第2の実施の形態における外界撮像部が取得した画像の一例を示す図である。
本実施の形態では、移動体検出部15によって前方に他の移動体71が検出された場合には、移動体の現在の速度から、移動体近傍よりも遠方に相当する画像の領域において標示線を検出することを要する場合であっても、走行車線パラメータ検出部17は当該遠方に相当する画像の領域においては標示線の検出を行わない。
次に図8を用いて本実施の形態におけるプログラムの処理を説明する。図8は、本実施の形態に係る走行路認識装置におけるプログラムの処理のフローチャートである。
図8は、第1の実施の形態に係る図3とは、「前方に他の移動体が存在するか否か」を判断するステップ8001及びステップ8002が存在する点において相違する。しかしながら、その他のステップについては第1の実施の形態と同様であるので、かかる第1の実施の形態と同様のステップに関しては図8においても図3と同一の符号を付し、それらの説明は省略する。
本実施の形態において、ステップ8001では、移動体検出部15が、原画像において先行する他の移動体71を検出し、かつ他の移動体71が第2の画像処理領域と干渉すると判断した場合は、第2の画像処理領域での標示線の検出を行わないようにする。
その結果、ステップ8001で、原画像において先行する他の移動体71が検出され、かつ他の移動体71が第2の画像処理領域と干渉すると判断された場合は、ステップ3005で検出した標示線に基づいて、ステップ3014において走行車線パラメータを推定する。
また、ステップ8002で、移動体検出部15が、原画像において先行する他の移動体71を検出し、かつ他の移動体71が第3の画像処理領域と干渉すると判断した場合は、第3の画像処理領域での標示線の検出を行わないようにする。
その結果、ステップ8002で、原画像において先行する他の移動体71が検出され、かつ他の移動体71が第3の画像処理領域と干渉すると判断された場合は、ステップ3005及びステップ3010で検出した標示線に基づいて、ステップ3014において走行車線パラメータを推定する。
図9は、本実施の形態に係る走行路認識装置による画像処理領域の設定の一例を示す図であり、第3の画像処理領域93と先行する他の移動体71とが干渉する場合を示している。図9のように、第3の画像処理領域93と他の移動体71とが干渉する場合は、第3の画像処理領域93から標示線を検出しない。
この図9のように、第3の画像処理領域93と他の移動体71とが干渉する場合は、第1の画像処理領域91から検出された標示線と、第2の画像処理領域92から検出された標示線とに基づいて、走行車線パラメータを推定する。
また、他の移動体71が、第2の画像処理領域92及び第3の画像処理領域93と干渉する場合は、第2の画像処理領域92及び第3の画像処理領域93からは標示線の検出を行わず、第1の画像処理領域91から検出された標示線に基づいて、走行車線パラメータを推定する。
ステップ8001及びステップ8002において、前方に他の移動体を検出しなかった場合は、第2の画像処理領域92及び第3の画像処理領域93において標示線を検出し、各々検出した標示線とステップ3005において第1の画像処理領域91で検出した標示線とに基づいて、ステップ3014において走行車線パラメータを推定する。
なお、ステップ8001及びステップ8002において、原画像から前方の他の移動体71を検出するには種々の方法が考えられるが、サポート・ベクトル・マシン(SVM)若しくはニューラル・ネットワーク(NN)等のパターン識別の方法又は原画像のエッジヒストグラムの分布から判断する方法等の公知の手法を用いればよい。
以上説明したように、本実施の形態によれば、前方に先行する他の移動体を検出した場合は、当該他の移動体が検出された領域では標示線の検出を行わないので、当該他の移動体から検出されたエッジによる標示線の誤検出を防止でき、かつ実態にそぐわない走行車線パラメータを推定するという無駄な演算を防止することができる。
例えば、図7に示したように、移動体の前方に他の移動体71が走行している場合、他の移動体の前方の標示線は画像から取得できない。このように走行車線が他の移動体によって隠蔽されているような場合であっても、前方の移動体から抽出されるエッジ等の画像特徴を用いて標示線を検出するようにすると、実際の走行車線の状況とは乖離した走行車線パラメータを推定するおそれがある。
しかしながら、本実施の形態では、他の移動体71とは干渉しない画像処理領域から検出した標示線に基づいて走行車線パラメータを推定するので、先行する他の移動体71から検出されるエッジに影響されない走行車線パラメータの推定が可能となる。
また、実態にそぐわない走行車線パラメータを推定するという無駄な演算を回避することができる。
[第3の実施の形態]
続いて、本発明の第3の実施の形態について説明する。本実施の形態に係る走行路認識装置は、第1の実施の形態の走行路認識装置と同様の構成であるため、その説明は省略する。
続いて、本発明の第3の実施の形態について説明する。本実施の形態に係る走行路認識装置は、第1の実施の形態の走行路認識装置と同様の構成であるため、その説明は省略する。
本実施の形態においても、第1の実施の形態と同様に、図4に示すように移動体の走行速度に応じて車線パラメータを算出するための画像処理領域及び画像の解像度を設定する。ただし、本実施の形態では移動体の現在の走行速度のみならず、移動体の加速度を考慮して画像処理領域及び解像度を設定することが、第1の実施の形態とは異なる。
移動体の現在の速度をv(km/h)、移動体の加速度をa(km/s2)(ただしa>0)とすると、予め定められた時間Δt秒後の速度v’は、以下の式(11)で求められる。
v’=v + a * Δt ・・・(11)
v’=v + a * Δt ・・・(11)
本実施の形態では、Δt秒後の移動体の速度v’が、予め定められた第1の速度閾値v1より低速であれば、領域解像度選択部16では新たに画像処理領域を設定しない。
したがって、Δt秒後の移動体の速度v’が第1の速度閾値v1未満の場合は、図4における第1の画像処理領域42で検出した標示線を用いて走行車線パラメータを算出する。
なお、Δtは3秒、第1の速度閾値v1は第1の実施の形態と同様に30〜40km/h程度の値を設定しておけばよい。ただし、Δtは適宜変更してもよい。
一方、Δt秒後の速度v’が第1の速度閾値v1以上であって、予め定められた第2の速度閾値v2(v2>v1)未満と推定された場合は、第1の画像処理領域42のみならず、第1の画像処理領域よりも解像度を向上させた第2の画像処理領域43の画像を用いて車線パラメータを算出する。ここで第2の速度閾値v2は、第1の実施の形態と同様に60〜100km程度の値を設定しておけばよい。
また、移動体が非常に大きな加速度で走行していることから、Δt秒後の速度v’が第2の速度閾値v2以上と推定される場合には、第1の画像処理領域42及び第2の画像処理領域43のみならず、原画像と同じ解像度の第3の画像処理領域44も用いて車線パラメータを算出する。
次に図10を用いて本実施の形態におけるプログラムの処理を説明する。図10は、本実施の形態に係る走行路認識装置におけるプログラムの処理のフローチャートである。
図10は、第1の実施の形態に係る図3とは、ステップ1001〜1010が存在する点において相違する。しかしながら、その他のステップについては第1の実施の形態と同様であるので、かかる第1の実施の形態と同様のステップに関しては図10においても図3と同一の符号を付し、それらの説明は省略する。
本実施の形態では、ステップ3007において、移動体の現在の速度が第1の速度閾値v1未満であると判断された場合、ステップ1001に移行する。
ステップ1001では、領域解像度選択部16が、移動体運動情報取得部14から取得した、移動体の現在の速度を示す速度情報と、移動体の加速度aの情報と、上記の式(11)とを用いて、Δt秒後の移動体の速度v’を算出する。
次いで、ステップ1002では、Δt秒後の移動体の速度v’が第1の速度閾値v1以上か否かが判断され、Δt秒後の移動体の速度v’が第1の速度閾値v1以上の場合は、ステップ1003においてΔt秒後の移動体の速度v’が第2の速度閾値v2以上か否かが判断される。
ステップ1003においてΔt秒後の移動体の速度v’が第2の速度閾値v2以上の場合は、ステップ1004〜1006で第2の画像処理領域43を設定し、当該第2の画像処理領域43から走行車線の標示線を検出する。
さらに、ステップ1007及びステップ1008で第3の画像処理領域44を設定し、当該第3の画像処理領域44から走行車線の標示線を検出する。
ステップ3014では、ステップ3005、ステップ1006及びステップ1008で検出した標示線に基づいて走行車線パラメータを推定する。本実施の形態で推定する走行車線パラメータは、第1の実施の形態と同様に、走行車線の幅である車線幅、移動体の姿勢角、走行車線の曲率である横断曲率及び走行車線における移動体の左右方向の位置を示す横変位等である。
なお、ステップ1004〜1006における処理は、第1の実施の形態のステップ3008〜3010における処理と同じなので、詳細な説明は省略する。
ステップ1007及びステップ1008における処理も、第1の実施の形態のステップ3012及びステップ3013における処理と同じなので、こちらも詳細な説明は省略する。
また、ステップ1002において、Δt秒後の移動体の速度v’が第1の速度閾値v1未満の場合は、ステップ3005で検出した標示線に基づいて、ステップ3014において各々の走行車線パラメータを推定する。
ステップ1003において、Δt秒後の移動体の速度v’が第2の速度閾値v2未満の場合は、手順をステップ3008に移行させ、第1の実施の形態と同様に、ステップ3008〜3010で第2の画像処理領域43を設定し、当該第2の画像処理領域43から走行車線の標示線を検出する。
また、本実施の形態では、ステップ3011において、移動体の現在の速度が第2の速度閾値v2未満であると判断された場合、ステップ1009に移行する。
ステップ1009では、領域解像度選択部16が、移動体運動情報取得部14から取得した、移動体の現在の速度を示す速度情報と、移動体の加速度aの情報と、上記の式(11)とを用いて、Δt秒後の移動体の速度v’を算出する。ステップ3011において、移動体の現在の速度が第2の速度閾値v2未満である場合であっても、加速度aが大きければ、Δt秒後の移動体の速度v’が、第2の速度閾値以上となる場合が考えられるからである。
続くステップ1010では、ステップ1009で算出されたΔt秒後の移動体の速度v’が第2の速度閾値以上か否かが判断され、Δt秒後の移動体の速度v’が第2の速度閾値以上の場合は、ステップ3012に移行する。
Δt秒後の移動体の速度v’が第2の速度閾値未満の場合は、ステップ3014に移行し、ステップ3005及びステップ3010で検出した標示線に基づいて、ステップ3014において各々の走行車線パラメータを推定する。
以上説明したように、本実施の形態によれば、移動体の現在の速度が第1の速度閾値v1未満となる低速の場合は、解像度を低下させた画像上に移動体近傍の領域を設定し、当該領域おいて標示線を検出することから、画像処理能力が限られている車載の装置でも標示線を簡易迅速に検出でき、さらに移動体の現在の速度と当該移動体の加速度に基づいた所定時間後の速度とに応じて、移動体近傍の領域のさらに遠方に相当する画像の部分に、当該移動体近傍の領域よりも狭い領域であって、解像度が当該移動体近傍の領域よりも高い領域を設定し、当該領域において標示線を検出するので、画像処理能力が限られた車載の装置でも標示線を遠方まで高精度で検出することが可能となる。
本発明のプログラムは、記録媒体に格納して提供したり、有線または無線による通信手段を介して提供したりする形態としてもよい。また、ソフトウエア構成による実現に限られるものではなく、ハードウエア構成や、ハードウエア構成とソフトウエア構成の組み合わせによって実現してもよい。
1 走行路認識装置
2 走行路認識装置
11 外界撮像部
12 画像入力部
13 基準標示線検出部
14 移動体運動情報取得部
15 移動体検出部
16 領域解像度選択部
17 走行車線パラメータ検出部
21 左走行車線
22 右走行車線
23 左標示線
24 右標示線
25 中央標示線
26 消失点
41 移動体
42 第1の画像処理領域
43 第2の画像処理領域
44 第3の画像処理領域
71 他の移動体
91 第1の画像処理領域
92 第2の画像処理領域
93 第3の画像処理領域
2 走行路認識装置
11 外界撮像部
12 画像入力部
13 基準標示線検出部
14 移動体運動情報取得部
15 移動体検出部
16 領域解像度選択部
17 走行車線パラメータ検出部
21 左走行車線
22 右走行車線
23 左標示線
24 右標示線
25 中央標示線
26 消失点
41 移動体
42 第1の画像処理領域
43 第2の画像処理領域
44 第3の画像処理領域
71 他の移動体
91 第1の画像処理領域
92 第2の画像処理領域
93 第3の画像処理領域
Claims (7)
- 移動体が走行する走行路を含む移動体の前方の領域を撮像する撮像手段と、
前記移動体の速度を示す速度情報を取得する速度情報取得手段と、
前記撮像手段が撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、前記速度情報で示される前記移動体の速度が所定値以上の場合に、前記速度が速くなるに従って位置が前記第1画像処理領域より徐々に遠方となり、かつ前記速度が速くなるに従って大きさが前記第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定する領域設定手段と、
前記領域設定手段で設定された画像処理領域から前記標示線を検出する標示線検出手段と、
を含む走行路認識装置。 - 前記領域設定手段は、前記移動体に近い画像処理領域ほど解像度を低下させる請求項1に記載の走行路認識装置。
- 前記領域設定手段は、前記第1画像処理領域から検出された標示線に基づいて前記走行路及び前記走行路を定める標示線が収束する消失点の座標を算出し、該消失点の座標と前記第1画像処理領域の位置とに基づいて前記第2画像処理領域の位置を決定し、前記第2画像処理領域を設定する請求項1又は2に記載の走行路認識装置。
- 前記画像から前記走行路上の前方における他の移動体を検出する移動体検出手段をさらに含み、
前記領域設定手段は、前記移動体検出手段が検出した前記他の移動体が、前記第2画像処理領域と干渉する場合は、前記他の移動体と干渉する第2画像処理領域では標示線の検出を中止する請求項1乃至3のいずれか1項に記載の走行路認識装置。 - 前記領域設定手段は、前記速度情報取得手段が取得した前記移動体の速度情報が示す前記移動体の速度が、前記所定値以上の第1の速度閾値以上となった場合、及び第1の速度閾値より大きい第2の速度閾値以上となった場合に、前記第2画像処理領域を各々設定する請求項1乃至4のいずれか1項に記載の走行路認識装置。
- 前記速度情報取得手段は、前記移動体の加速度の情報をさらに取得し、
前記領域設定手段は、前記速度情報取得手段が取得した前記移動体の速度情報及び前記移動体の加速度の情報から、予め定められた時間後の前記移動体の速度を算出し、かつ、前記速度情報取得手段が取得した前記移動体の速度情報が示す前記移動体の速度又は前記予め定められた時間後の前記移動体の速度が、前記所定値以上の第1の速度閾値以上となった場合、及び第1の速度閾値より大きい第2の速度閾値以上となった場合に、前記第2画像処理領域を各々設定する請求項1乃至4のいずれか1項に記載の走行路認識装置。 - コンピュータを、
移動体が走行する走行路を含む移動体の前方の領域を撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、前記移動体の速度が所定値以上の場合に、前記速度が速くなるに従って位置が前記第1画像処理領域より徐々に遠方となり、かつ前記速度が速くなるに従って大きさが前記第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定する領域設定手段、及び前記領域設定手段で設定された画像処理領域から前記標示線を検出する標示線検出手段
として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011124396A JP2012252501A (ja) | 2011-06-02 | 2011-06-02 | 走行路認識装置及び走行路認識用プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011124396A JP2012252501A (ja) | 2011-06-02 | 2011-06-02 | 走行路認識装置及び走行路認識用プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012252501A true JP2012252501A (ja) | 2012-12-20 |
Family
ID=47525269
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011124396A Withdrawn JP2012252501A (ja) | 2011-06-02 | 2011-06-02 | 走行路認識装置及び走行路認識用プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012252501A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015182148A1 (ja) * | 2014-05-28 | 2015-12-03 | 京セラ株式会社 | 物体検出装置および物体検出装置を設置した車両 |
| JPWO2016063545A1 (ja) * | 2014-10-24 | 2017-06-29 | 京セラ株式会社 | ステレオカメラ装置及びステレオカメラ装置を備える車両 |
| JPWO2016208067A1 (ja) * | 2015-06-26 | 2018-06-07 | 日産自動車株式会社 | 車両位置判定装置及び車両位置判定方法 |
| JP2018169888A (ja) * | 2017-03-30 | 2018-11-01 | 株式会社デンソー | 道路パラメータ推定装置 |
| CN109389026A (zh) * | 2017-08-09 | 2019-02-26 | 三星电子株式会社 | 车道检测方法和设备 |
| KR102089230B1 (ko) * | 2019-12-30 | 2020-03-13 | 주식회사 애자일소다 | 영상을 이용한 차량의 속도 예측 장치 및 방법 |
| US12106584B2 (en) | 2021-03-09 | 2024-10-01 | Honda Motor Co., Ltd. | Object recognition device, object recognition method, and storage medium |
-
2011
- 2011-06-02 JP JP2011124396A patent/JP2012252501A/ja not_active Withdrawn
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015182148A1 (ja) * | 2014-05-28 | 2015-12-03 | 京セラ株式会社 | 物体検出装置および物体検出装置を設置した車両 |
| JPWO2015182148A1 (ja) * | 2014-05-28 | 2017-04-20 | 京セラ株式会社 | 物体検出装置、物体検出装置を設置した車両およびプログラム |
| US10354148B2 (en) | 2014-05-28 | 2019-07-16 | Kyocera Corporation | Object detection apparatus, vehicle provided with object detection apparatus, and non-transitory recording medium |
| JPWO2016063545A1 (ja) * | 2014-10-24 | 2017-06-29 | 京セラ株式会社 | ステレオカメラ装置及びステレオカメラ装置を備える車両 |
| JPWO2016208067A1 (ja) * | 2015-06-26 | 2018-06-07 | 日産自動車株式会社 | 車両位置判定装置及び車両位置判定方法 |
| US10145692B2 (en) | 2015-06-26 | 2018-12-04 | Nissan Motor Co., Ltd. | Vehicle position determination apparatus and vehicle position determination method |
| JP2018169888A (ja) * | 2017-03-30 | 2018-11-01 | 株式会社デンソー | 道路パラメータ推定装置 |
| CN109389026A (zh) * | 2017-08-09 | 2019-02-26 | 三星电子株式会社 | 车道检测方法和设备 |
| CN109389026B (zh) * | 2017-08-09 | 2023-10-17 | 三星电子株式会社 | 车道检测方法和设备 |
| KR102089230B1 (ko) * | 2019-12-30 | 2020-03-13 | 주식회사 애자일소다 | 영상을 이용한 차량의 속도 예측 장치 및 방법 |
| US12106584B2 (en) | 2021-03-09 | 2024-10-01 | Honda Motor Co., Ltd. | Object recognition device, object recognition method, and storage medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9443313B2 (en) | Stereo camera apparatus | |
| JP6163453B2 (ja) | 物体検出装置、運転支援装置、物体検出方法、および物体検出プログラム | |
| EP2741256B1 (en) | Moving body detection device and method | |
| US20130286205A1 (en) | Approaching object detection device and method for detecting approaching objects | |
| JP5561064B2 (ja) | 車両用対象物認識装置 | |
| JP7206583B2 (ja) | 情報処理装置、撮像装置、機器制御システム、移動体、情報処理方法およびプログラム | |
| US20150262365A1 (en) | Image processing device and image processing method | |
| JP2012252501A (ja) | 走行路認識装置及び走行路認識用プログラム | |
| JP6139465B2 (ja) | 物体検出装置、運転支援装置、物体検出方法、および物体検出プログラム | |
| WO2017159056A1 (ja) | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム | |
| WO2014002692A1 (ja) | ステレオカメラ | |
| US10902632B2 (en) | Position detection apparatus and position detection method | |
| JP5541099B2 (ja) | 道路区画線認識装置 | |
| JP6032141B2 (ja) | 走行路面標示検知装置および走行路面標示検知方法 | |
| JP5903901B2 (ja) | 車両位置算出装置 | |
| JP5493705B2 (ja) | 車両位置検出装置、車両位置検出方法、及び車両位置検出プログラム | |
| JP2005301892A (ja) | 複数のカメラによるレーン認識装置 | |
| JP7134780B2 (ja) | ステレオカメラ装置 | |
| US20080049978A1 (en) | Image processing apparatus and image processing method | |
| WO2018097269A1 (en) | Information processing device, imaging device, equipment control system, mobile object, information processing method, and computer-readable recording medium | |
| JP6561688B2 (ja) | 検出装置、検出方法、撮像装置、機器制御システム、及びプログラム | |
| KR102681321B1 (ko) | 듀얼 카메라를 이용하여 거리를 계산하는 고속도로 주행지원 시스템의 성능 평가 장치와 그 방법 | |
| WO2023068034A1 (ja) | 画像処理装置 | |
| JP5304292B2 (ja) | 車両用接近物検出装置 | |
| JP4956841B2 (ja) | 車両用画像処理装置、車両、及び車両用画像処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140805 |