JP2012171616A - Torque distributor and method of distributing torque - Google Patents
Torque distributor and method of distributing torque Download PDFInfo
- Publication number
- JP2012171616A JP2012171616A JP2012031103A JP2012031103A JP2012171616A JP 2012171616 A JP2012171616 A JP 2012171616A JP 2012031103 A JP2012031103 A JP 2012031103A JP 2012031103 A JP2012031103 A JP 2012031103A JP 2012171616 A JP2012171616 A JP 2012171616A
- Authority
- JP
- Japan
- Prior art keywords
- torque
- efficiency
- value
- distribution
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















































Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Arrangement And Driving Of Transmission Devices (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
この発明は、移動体の複数の駆動輪を駆動する際のトルクを配分するトルク配分装置およびトルク配分方法に関する。ただし、この発明の利用は、上述したトルク配分装置およびトルク配分方法には限られない。 The present invention relates to a torque distribution device and a torque distribution method for distributing torque when driving a plurality of drive wheels of a moving body. However, utilization of this invention is not restricted to the torque distribution apparatus and torque distribution method which were mentioned above.
従来、移動体である電気自動車(EV)に複数のモータを設け、複数の駆動輪(車輪)を駆動するトルクを配分するトルク配分として、下記の各技術が開示されている。 Conventionally, the following technologies have been disclosed as torque distribution in which a plurality of motors are provided in an electric vehicle (EV), which is a moving body, and torque for driving a plurality of drive wheels (wheels) is distributed.
一つめの技術は、モータトルクの各組み合わせについて電力消費を演算によって求め、横軸に駆動力配分をとったグラフを得て、トルク配分する構成である。この構成では、出力可能電力Pout[kW]と、トルク制限値の範囲内で過渡要求駆動力を実現するモータトルクの組み合わせを実現した場合の電力消費の最小値(以下、最小電力消費)との大小関係を比較する。出力可能電力Pout[kW]が最小電力消費以上であると判断した場合には、最小電力消費となる前後輪のモータトルクをそのままトルク指令値としている(下記特許文献1参照。)。
The first technique is a configuration in which the electric power consumption is obtained by calculation for each combination of motor torques, a graph with the driving force distribution on the horizontal axis is obtained, and the torque is distributed. In this configuration, the output power Pout [kW] and the minimum value of power consumption (hereinafter referred to as the minimum power consumption) when the combination of the motor torque that realizes the transient required driving force within the range of the torque limit value is realized. Compare magnitude relationships. When it is determined that the outputtable power Pout [kW] is equal to or greater than the minimum power consumption, the motor torques of the front and rear wheels that cause the minimum power consumption are directly used as torque command values (see
二つめの技術は、合計トルクを複数のモータに配分する構成であり、前部の駆動輪2個同士と、後部の駆動輪2個同士とは互いに等しいトルク配分として、システム効率が最大となるトルク配分比を示すシステム効率マップを作成して用いる構成である(下記特許文献2参照。)。
The second technique is a configuration in which the total torque is distributed to a plurality of motors, and the system efficiency is maximized as the torque distribution is equal between the two front drive wheels and the two rear drive wheels. In this configuration, a system efficiency map indicating a torque distribution ratio is created and used (see
三つめの技術は、要求駆動パワーおよび車速に基づいて燃料消費量、蓄電装置の充放電電力および前後輪の駆動力配分の関係を示したマップを検索する。この後に、抽出されたマップの中で蓄電装置の充放電電力に対する燃料消費量が最小になる駆動力配分を抽出することにより、燃費向上前後駆動力配分マップを得る構成である(下記特許文献3参照。)。
In the third technique, a map showing the relationship among the fuel consumption, the charge / discharge power of the power storage device, and the driving force distribution of the front and rear wheels is searched based on the required driving power and the vehicle speed. Thereafter, by extracting the driving force distribution that minimizes the fuel consumption with respect to the charge / discharge power of the power storage device from the extracted map, the driving power distribution map before and after improving the fuel efficiency is obtained (
四つめの技術は、駆動力配分決定部が、モータ要求駆動力に対応するモータ要求駆動トルクおよび車両速度と、モータジェネレータの各々のトルクおよび車両速度に対する効率特性とに基づいて、モータジェネレータの間での駆動トルク配分を決定する。この際、低出力域での駆動トルク配分と、高出力域での駆動トルク配分とを異なるパターンを用いて制御し、モータジェネレータ全体の効率を最も高くする構成である(下記特許文献4参照。)。 In the fourth technique, the driving force distribution determining unit determines whether the motor generator generates a motor based on the motor required driving torque and the vehicle speed corresponding to the motor required driving force, and the efficiency characteristics of the motor generator with respect to each torque and vehicle speed. The drive torque distribution at is determined. At this time, the drive torque distribution in the low output region and the drive torque distribution in the high output region are controlled using different patterns, so that the efficiency of the entire motor generator is maximized (see Patent Document 4 below). ).
五つめの技術は、左右前車輪に要求される駆動トルクの総和と、モータジェネレータの回転速度とに基づいて、モータジェネレータ全体の駆動効率が最大となるように、右前車輪と、左前車輪との駆動トルク配分を決定する。そして、旋回方向に応じてモータジェネレータのいずれか一方のみを駆動するように右前車輪と、左前車輪との駆動トルク配分を決定する構成である(下記特許文献5参照。)。 The fifth technique is based on the sum of the drive torques required for the left and right front wheels and the rotational speed of the motor generator so that the drive efficiency of the entire motor generator is maximized. Determine the drive torque distribution. And it is the structure which determines the drive torque distribution of a right front wheel and a left front wheel so that only either one of a motor generator may be driven according to a turning direction (refer the following patent document 5).
六つめの技術は、エネルギー効率に基づいて車輪のトルク配分をおこなう制御(エネルギー効率の制御)と、各車輪の荷重配分に基づいて車輪のトルク配分をおこなう制御(荷重配分の制御)とが選択可能な構成である(下記特許文献6参照。)。 The sixth technology is a choice between wheel torque distribution control based on energy efficiency (energy efficiency control) and wheel torque distribution control based on each wheel load distribution (load distribution control). This is a possible configuration (see Patent Document 6 below).
このような、4輪駆動車の前輪および後輪を、電動モータにより駆動するにあたり、要求トルクおよびエネルギー効率をパラメータとして用い、エネルギー効率が相対的に高くなるようにする制御は、たとえば、特許文献2等に開示されているように、既に知られている技術である。また、前輪および後輪における荷重の配分比は、たとえば、4輪駆動車の重心の高さ、重心から前輪までの距離、重心から後輪までの距離、前輪の車軸と後輪の車軸との間の距離(ホイールベース)、左右輪の幅(トレッド)、車両の旋回加速度(横加速度)、車両の前後方向の加速度などにより求められ、前輪と後輪との間における荷重の配分比と一致させるように、前輪および後輪におけるトルクの配分比を決定するようになっている。このパラメータを用いて、前輪および後輪の荷重配分比を求め、その荷重の配分比に応じてトルクの配分比を決定する制御については、たとえば、下記特許文献7等により既に知られている技術である。 Such a control that uses the required torque and energy efficiency as parameters to drive the front wheels and rear wheels of a four-wheel drive vehicle as parameters and makes the energy efficiency relatively high is, for example, Patent Document As disclosed in No. 2 etc., it is a known technique. The load distribution ratio between the front wheel and the rear wheel is, for example, the height of the center of gravity of a four-wheel drive vehicle, the distance from the center of gravity to the front wheel, the distance from the center of gravity to the rear wheel, the axle of the front wheel and the axle of the rear wheel. It is determined by the distance between the wheels (wheelbase), the width of the left and right wheels (tread), the turning acceleration of the vehicle (lateral acceleration), the acceleration in the longitudinal direction of the vehicle, etc., and matches the load distribution ratio between the front wheels and the rear wheels Thus, the torque distribution ratio in the front wheels and the rear wheels is determined. With respect to the control for obtaining the load distribution ratio of the front wheels and the rear wheels using this parameter and determining the torque distribution ratio according to the load distribution ratio, for example, a technique already known from Patent Document 7 below, for example It is.
しかしながら、上記の特許文献1〜7に記載の技術は、モータの高効率を目的としてモータトルクを配分するという技術思想であり、モータの効率マップを活用してこのモータ効率マップ上の最適効率トルク値に基づいてトルク配分するものではない。
However, the techniques described in
また、特許文献1〜3に記載の技術は、いずれも駆動輪を前部と後部の2個ずつに配分する構成であり、各駆動輪を独立して制御することを想定していない。また、特許文献4に記載の技術は、ハイブリッド車に適用され、左右後車輪だけが独立したインホイールモータに適用する構成であり、全駆動輪を独立して制御することを想定していない。このような構成では、たとえば4つの駆動輪を独立して制御することができず、複数の駆動輪に対して最適なトルク配分がおこなえない。
In addition, all of the techniques described in
さらに、上記の特許文献1〜7では、いずれも駆動輪(車輪)のスリップ状態を考慮していないため、高効率化できない不十分なトルク配分制御であった。路面に対する駆動輪のスリップ状態は、移動体の速度、さらに詳細には駆動輪の回転速度等の要因によって変化する。このため、駆動輪のスリップ状態を考慮しておかないと、各駆動輪に対するトルク配分を効率化できず、駆動輪を実際に駆動したときに最適なトルク配分がおこなえず、駆動系全体の効率を最大限とする最適化ができない。
Further, in each of
上述した課題を解決し、目的を達成するため、この発明にかかるトルク配分装置は、駆動輪に接続された複数個のモータの各々に対して、入力された全トルク指令値を配分するトルク配分装置であって、前記入力された全トルク指令値を取得する全トルク指令値取得手段と、前記モータに対応するモータ効率マップを取得する効率マップ取得手段と、前記モータを搭載する車両の車体速度を検出する車体速度検出手段と、前記駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出手段と、前記車体速度及び前記駆動輪回転速度に基づいて、前記駆動輪におけるスリップ率を検出するスリップ率検出手段と、前記スリップ率に基づいて、前記駆動輪回転速度とトルクの関係を示す動作線式を作成し、前記動作線式に基づいて、前記駆動輪回転速度毎に前記トルクと前記モータ効率マップの効率値を示す効率変化式を作成し、前記効率変化式の最適効率トルク値を算出する算出手段と、前記スリップ率、前記全トルク指令値、および、前記最適効率トルク値に基づいて、総合効率ηtotal =Σ((Tn/T)×ηdn×ηλn)(ただし、T:全トルク指令値、Tn:各モータのトルク配分値、ηdn:各モータの駆動系効率、ηλn:各駆動輪の走行系効率)が最大となるように、各々の前記モータに対するトルク配分値を算出する配分手段と、算出した前記トルク配分値に基づいて、各々の前記モータへトルク配分制御する制御手段と、を備え、前記配分手段は、複数個のモータのうち、いずれか一部のモータのトルク配分値のみに前記最適効率トルク値を配分、あるいは全部または一部のモータに対して、それぞれのトルク配分値が最も前記最適効率トルク値に近づくように前記全トルク指令値を均等配分することを特徴とする。 In order to solve the above-described problems and achieve the object, a torque distribution device according to the present invention distributes all input torque command values to each of a plurality of motors connected to drive wheels. An apparatus for obtaining a total torque command value for obtaining the inputted total torque command value; an efficiency map obtaining unit for obtaining a motor efficiency map corresponding to the motor; and a vehicle body speed of a vehicle on which the motor is mounted. A vehicle wheel speed detecting means for detecting the driving wheel, a driving wheel rotating speed detecting means for detecting a driving wheel rotating speed of the driving wheel, and a slip ratio in the driving wheel based on the vehicle body speed and the driving wheel rotating speed. Based on the slip ratio detection means and the slip ratio, an operation line expression indicating a relationship between the drive wheel rotation speed and the torque is created, and based on the operation line expression, the drive An efficiency change equation indicating the torque and an efficiency value of the motor efficiency map for each rotation speed is created, calculating means for calculating an optimum efficiency torque value of the efficiency change equation, the slip ratio, the total torque command value, and Based on the optimum efficiency torque value, the total efficiency ηtotal = Σ ((Tn / T) × ηdn × ηλn) (where T: total torque command value, Tn: torque distribution value of each motor, ηdn: Distribution means for calculating a torque distribution value for each of the motors so that the drive system efficiency, ηλn (traveling system efficiency of each drive wheel) is maximized, and each of the motors based on the calculated torque distribution value Control means for controlling torque distribution to the motor, wherein the distribution means distributes the optimum efficiency torque value only to the torque distribution value of any one of a plurality of motors, or all or All the torque command values are equally distributed to some motors so that the respective torque distribution values are closest to the optimum efficiency torque value.
また、この発明にかかるトルク配分方法は、駆動輪に接続された複数個のモータの各々に対して、入力された全トルク指令値を配分するトルク配分方法であって、前記入力された全トルク指令値を取得する全トルク指令値取得工程と、前記モータに対応するモータ効率マップを取得する効率マップ取得工程と、前記モータを搭載する車両の車体速度を検出する車体速度検出工程と、前記駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出工程と、前記車体速度及び前記駆動輪回転速度に基づいて、前記駆動輪におけるスリップ率を検出するスリップ率検出工程と、前記スリップ率に基づいて、前記駆動輪回転速度とトルクの関係を示す動作線式を作成し、前記動作線式に基づいて、前記駆動輪回転速度毎に前記トルクと前記モータ効率マップの効率値を示す効率変化式を作成し、前記効率変化式の最適効率トルク値を算出する算出工程と、前記スリップ率、前記全トルク指令値、および、前記最適効率トルク値に基づいて、総合効率ηtotal =Σ((Tn/T)×ηdn×ηλn)(ただし、T:全トルク指令値、Tn:各モータのトルク配分値、ηdn:各モータの駆動系効率、ηλn:各駆動輪の走行系効率)が最大となるように、各々の前記モータに対するトルク配分値を算出する配分工程と、算出した前記トルク配分値に基づいて、各々の前記モータへトルク配分制御する制御工程と、を含み、前記配分工程は、複数個のモータのうち、いずれか一部のモータのトルク配分値のみに前記最適効率トルク値を配分、あるいは全部または一部のモータに対して、それぞれのトルク配分値が最も前記最適効率トルク値に近づくように前記全トルク指令値を均等配分することを特徴とする。 The torque distribution method according to the present invention is a torque distribution method for distributing the input total torque command value to each of the plurality of motors connected to the drive wheels, wherein the input total torque A total torque command value acquiring step for acquiring a command value; an efficiency map acquiring step for acquiring a motor efficiency map corresponding to the motor; a vehicle body speed detecting step for detecting a vehicle body speed of a vehicle equipped with the motor; and the driving A driving wheel rotational speed detecting step for detecting a driving wheel rotational speed in the wheel; a slip ratio detecting step for detecting a slip ratio in the driving wheel based on the vehicle body speed and the driving wheel rotational speed; and on the basis of the slip ratio. Then, an operation line expression indicating a relationship between the drive wheel rotation speed and the torque is created, and the torque and the motor are generated for each drive wheel rotation speed based on the operation line expression. An efficiency change equation indicating an efficiency value of the rate map is created, based on the calculation step of calculating the optimum efficiency torque value of the efficiency change equation, the slip ratio, the total torque command value, and the optimum efficiency torque value , Total efficiency ηtotal = Σ ((Tn / T) × ηdn × ηλn) (where T: total torque command value, Tn: torque distribution value of each motor, ηdn: drive system efficiency of each motor, ηλn: each drive wheel A distribution step of calculating a torque distribution value for each of the motors so as to maximize the traveling system efficiency), and a control step of controlling torque distribution to each of the motors based on the calculated torque distribution values; And the distribution step distributes the optimum efficiency torque value only to the torque distribution value of any one of the plurality of motors, or each torque for all or some of the motors. The torque distribution value is evenly distributed so that the torque distribution value is closest to the optimum efficiency torque value.
以下に添付図面を参照して、この発明にかかるトルク配分装置およびトルク配分方法の好適な実施の形態を詳細に説明する。以下の説明において、「回転速度」とは「駆動輪回転速度」であることとして説明する。 Exemplary embodiments of a torque distribution device and a torque distribution method according to the present invention will be explained below in detail with reference to the accompanying drawings. In the following description, “rotational speed” will be described as “drive wheel rotational speed”.
(実施の形態)
(トルク配分装置の構成)
図1は、実施の形態にかかるトルク配分装置の機能的構成を示すブロック図である。実施の形態にかかるトルク配分装置100は、モータ効率マップを用い、このモータ効率マップ上の最適効率トルク値に基づいて複数の駆動輪に対するトルク配分を制御する。
(Embodiment)
(Configuration of torque distribution device)
FIG. 1 is a block diagram illustrating a functional configuration of the torque distribution device according to the embodiment. The
このトルク配分装置100は、全トルク指令値取得部101と、車体速度検出部102aと、駆動輪速度検出部102bと、スリップ率算出部103と、モータ効率マップ104と、効率マップ取得部105と、算出部106と、配分部107と、制御部108とによって構成される。
The
全トルク指令値取得部101は、移動体を駆動するための全トルク指令値を取得する。すなわち、駆動輪にそれぞれ設けられた複数個nのモータM(M1,M2,…Mn)を駆動するために入力された全トルク指令値を取得する。なお、この実施形態において、複数個のモータMは、同じ種類のモータを使用することを前提として説明する。
The total torque command
車体速度検出部102aは、移動体の速度を検出する。駆動輪速度検出部102bは、移動体に設けられた駆動輪速度を検出する。駆動輪速度vwは、タイヤの半径r×駆動輪回転速度ωより算出される(vw=r×ω)。
The vehicle body speed detection unit 102a detects the speed of the moving body. The drive wheel
スリップ率算出部103は、車体速度検出部102aにより検出された移動体の速度と、駆動輪速度検出部102bにより検出された駆動輪速度(駆動輪回転速度、およびタイヤ半径)に基づき、後述のように各駆動輪におけるスリップ率を算出する。モータ効率マップ104は、後述する図5のように各モータMにおける速度と、トルクとの関係を示すマップであり、このマップ上にはトルクと速度とに基づいて、略直線状の動作線を引くことができる。効率マップ取得部105は、モータMに対応するモータ効率マップ104を取得する。
The slip
モータ効率マップの取得は、1.モータメーカーあるいは車メーカーがあらかじめ用意したモータ効率マップをメモリ等に保持しておく、2.移動体を走行させながらモータ効率マップを作成する、等が考えられる。 To obtain a motor efficiency map: 1. A motor efficiency map prepared in advance by a motor manufacturer or car manufacturer is stored in a memory or the like. For example, a motor efficiency map may be created while the moving body is running.
算出部106は、スリップ率算出部103により算出されたスリップ率に基づいて、回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成して、前記動作線上の効率変化式における最適効率トルク値を算出する。
Based on the slip ratio calculated by the slip
配分部107は、後述のように全トルク指令値取得部101により取得した全トルク指令値と、算出部106により算出した最適効率トルク値に基づいて、各々のモータMに対するトルク配分値を算出する。制御部108は、配分部107により算出したトルク配分値に基づいて、各々のモータMへのトルク配分を制御する。
The
(トルク配分処理について)
図2は、トルク配分装置によるトルク配分処理の手順を示すフローチャートである。はじめに、全トルク指令値取得部101により、駆動輪にそれぞれ設けられた複数個のモータM(M1,M2,…Mn)を駆動するためにアクセルペダルから入力された全トルク指令値Tを取得する(ステップS201)。次に、車体速度検出部102aにより、移動体の車体速度を検出し(ステップS202)、駆動輪速度検出部102bにより、駆動輪における車輪速度を検出する(ステップS203)。そして、スリップ率算出部103により、移動体速度、駆動輪速度(駆動輪回転速度とタイヤ半径)を用いて駆動輪におけるスリップ率を算出する(ステップS204)。
(About torque distribution processing)
FIG. 2 is a flowchart showing a procedure of torque distribution processing by the torque distribution device. First, the total torque command
次に、効率マップ取得部105により、モータMに対応するモータ効率マップ104を取得する(ステップS205)。次に、算出部106により、駆動輪速度検出部102bにより検出された車輪速度と、スリップ率算出部103によって算出されたスリップ率に基づいて、回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成して、前記動作線上の効率変化式における最適効率トルク値Toを算出する(ステップS206)。次に、配分部107により、全トルク指令値取得部101により取得した全トルク指令値Tと、算出部106により算出した最適効率トルク値Toに基づいて、各々のモータMに対するトルク配分値を算出する(ステップS207)。そして、制御部108により、配分部107が算出したトルク配分値に基づいて、各々のモータMへのトルク配分を制御する(ステップS208)。
Next, the efficiency
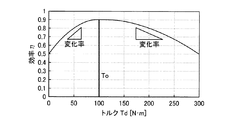
一般にモータ効率マップ上の動作線は直線状とされているが、実際には、トルク配分を変更すると駆動輪のトルクが変化し、それに応じて駆動輪の回転速度が変化することになる。したがって、車体速度が一定の条件下では、モータ効率マップ上における動作線は直線状ではなく、後述する図5のように傾斜(厳密には所定の曲線)となる。この動作線上のトルク値に対する効率値は、トルク−効率の特性として表すことができる。このトルク−効率の特性は後述する図10のように曲線であるから、最も効率が高くなるトルクが現れることになる。この最も効率が高くなるときのトルクを最適効率トルク値Toと称する。そして、この最適効率トルク値Toを基準として、全トルク指令値Tを複数個nのモータMに対して所定のトルク配分で配分する。 In general, the operation line on the motor efficiency map is a straight line. However, when the torque distribution is changed, the torque of the driving wheel changes, and the rotational speed of the driving wheel changes accordingly. Therefore, under a condition where the vehicle body speed is constant, the operation line on the motor efficiency map is not linear but has an inclination (strictly, a predetermined curve) as shown in FIG. The efficiency value with respect to the torque value on the operation line can be expressed as a torque-efficiency characteristic. Since this torque-efficiency characteristic is a curve as shown in FIG. 10 described later, the torque with the highest efficiency appears. The torque at which the efficiency is highest is referred to as the optimum efficiency torque value To. Then, using this optimum efficiency torque value To as a reference, all torque command values T are distributed to a plurality of n motors M with a predetermined torque distribution.
上記の配分部107によるn個のモータMへのトルク配分例について説明する。配分部107は、複数個nのモータのうち、いずれか一部のモータMのトルク配分値のみに最適効率トルク値Toの全てを配分、あるいは全部または一部のモータMに対して、それぞれのトルク配分値が最も最適効率トルク値Toに近づくように全トルク指令値Tを均等配分する。
An example of torque distribution to the n motors M by the
ここで、車輪速度およびスリップ率と、回転速度とトルクの関係を示す動作線上の効率地を示す効率変化式は下記の手順によって求められる。
1.現在の車体速度の検出
2.現在の駆動輪速度の検出
3.スリップ率の算出
4.モータ駆動電流から現在のトルクを検出
5.動作線式を算出(後述する式(8)を用いる)
6.動作線を効率マップ上に引いて、動作線に沿って、トルク値と効率値の組合せを複数ポイント取得
7.複数ポイントのトルク値と効率値より効率変化式を作成
この時、ポイント数が多いほど、効率変化式の近似式の精度を上げることができる。
Here, the efficiency change equation indicating the efficiency place on the operation line indicating the relationship between the wheel speed and the slip ratio, the rotation speed and the torque is obtained by the following procedure.
1. 1. Detection of
6). 6. Draw an action line on the efficiency map and obtain multiple points of combinations of torque value and efficiency value along the action line. Creating an efficiency change formula from torque values and efficiency values at multiple points At this time, the accuracy of the approximate formula of the efficiency change formula can be increased as the number of points increases.
トルクTdは、μ・N・r(μ:路面とタイヤの摩擦係数、N:垂直抗力、r:タイヤ半径)であるため(後述する式(5))、トルクTdが変化すると摩擦係数μが変化する。摩擦係数μが変化するとスリップ率λが変化する(図6に記載)。加速や減速が大きくない場合は、回転速度vの変化が小さいので、スリップ率λが変化すると、回転速度ωが変化する。つまり、駆動輪に与えるトルク値に応じて、その駆動輪の回転速度が変化することになる。その関係は後述する式(8)および図7で表される。この式(8)を使用するためには、スリップ率と摩擦係数との関係(後述する式(6))を用いる。この関係については、移動体外部のサーバ等から走行路面の式(6)を取得するか、あるいは自車で作成するかいずれかとなる。 Since the torque Td is μ · N · r (μ: friction coefficient between road surface and tire, N: vertical drag, r: tire radius) (equation (5) described later), the friction coefficient μ changes when the torque Td changes. Change. As the friction coefficient μ changes, the slip ratio λ changes (described in FIG. 6). When the acceleration or deceleration is not large, the change in the rotational speed v is small, so that the rotational speed ω changes when the slip ratio λ changes. That is, the rotational speed of the drive wheel changes according to the torque value applied to the drive wheel. The relationship is expressed by equation (8) described later and FIG. In order to use this formula (8), the relationship between the slip ratio and the friction coefficient (formula (6) described later) is used. With respect to this relationship, either the equation (6) of the traveling road surface is acquired from a server or the like outside the moving body, or is created by the own vehicle.
自車でスリップ率と摩擦係数との関係の式(6)を作成するには、下記の手順となる。
1.現在の車体速度と駆動輪回転速度を検出し、スリップ率λを求める。
2.現在のモータ駆動電流からトルク値を求め、Td=μ・N・rからμ値を算出する。
3.走行しながら複数ポイントのλとμ値を求めて、図6のμ-λ特性を作成し、式(6)を生成する。
なお、トルク値は、予め判っているトルク定数に駆動電流を乗じて求められる。また、この場合、通常はタイヤを空転させずに走行するため、μのピーク部を超えない範囲のλ値とμ値(図6ではλが0.2以下)が検出可能である。μのピーク部を超える範囲(図6ではλが0.2以上)のポイントは検出できないが、本発明において必要とする領域はμのピーク部を超えない範囲であるため、その領域のμ−λ特性を作成して式(6)が生成できれば問題ない。
The following procedure is used to create the relationship (6) between the slip ratio and the friction coefficient in the vehicle.
1. The current vehicle speed and drive wheel rotation speed are detected to determine the slip ratio λ.
2. A torque value is obtained from the current motor drive current, and a μ value is calculated from Td = μ · N · r.
3. While traveling, the λ and μ values at a plurality of points are obtained, and the μ-λ characteristic shown in FIG. 6 is created to generate the equation (6).
The torque value is obtained by multiplying a known torque constant by the drive current. In this case, since the tire normally travels without idling, it is possible to detect the λ value and μ value (λ is 0.2 or less in FIG. 6) in a range not exceeding the peak portion of μ. A point in the range exceeding the peak portion of μ (λ is 0.2 or more in FIG. 6) cannot be detected. However, since the region required in the present invention is a range not exceeding the peak portion of μ, μ− There is no problem if the formula (6) can be generated by creating the λ characteristic.
以上説明した実施の形態にかかるトルク配分装置100は、モータ効率マップ104上における最適効率トルク値Toを算出する際に、算出されたスリップ率を考慮している。路面に対する駆動輪のスリップ状態は、移動体の速度、さらに詳細には駆動輪の回転速度等の要因によって変化するが、駆動輪のスリップ状態を考慮することにより、各駆動輪に対するトルク配分を効率化できるようになり、駆動輪を実際に駆動したときに最適なトルク配分をおこない、かつ、モータ効率が高い領域で駆動できるようになるため、駆動系の効率が最大となる最適化ができるようになる。この駆動系とは、モータおよびインバータからなる移動体の駆動に関わる構成を指す。
The
(実施例1)
以下に、本発明の実施例1について説明する。本実施例1では、4つの駆動輪にそれぞれ組み込まれ、独立して駆動されるインホイール型のモータを搭載した車両等の移動体にトルク配分装置を適用した場合の一例について説明する。この場合、モータMの個数は、M1〜M4の4個を用いる。モータMとしては、三相交流モータやDCモータを用いることができる。以下の実施例では4つの駆動輪に同一のモータを用いる。なお、後述のように、駆動輪は、4つに限られず、2つ、3つ、或いは5つ以上にも本発明を適用することが可能である。
Example 1
Example 1 of the present invention will be described below. In the first embodiment, an example will be described in which the torque distribution device is applied to a moving body such as a vehicle equipped with an in-wheel type motor that is incorporated in each of four drive wheels and driven independently. In this case, four motors M1 to M4 are used. As the motor M, a three-phase AC motor or a DC motor can be used. In the following embodiments, the same motor is used for the four drive wheels. As will be described later, the number of drive wheels is not limited to four, and the present invention can be applied to two, three, five, or more.
(移動体の構成)
図3は、移動体の構成を示す概要図である。移動体300は、左右の前駆動輪FL,FRと、左右の後駆動輪RL,RRを有する4輪駆動車である。これら4つの各駆動輪FL,FR,RL,RRには、それぞれインホイール型のモータM1〜M4が設けられ、独立に駆動される。
(Configuration of mobile body)
FIG. 3 is a schematic diagram showing the configuration of the moving body. The moving
これらモータM1〜M4には、それぞれモータ駆動用のインバータINVが設けられ、各インバータINVはコントローラ(ECU)301の制御に基づき、モータM1〜M4を駆動する。このコントローラ301には各種情報が入力され、トルク配分された結果、各モータM1〜M4を駆動する。 Each of the motors M1 to M4 is provided with an inverter INV for driving the motor, and each inverter INV drives the motors M1 to M4 based on the control of the controller (ECU) 301. Various information is input to the controller 301, and the motors M1 to M4 are driven as a result of torque distribution.
コントローラ301に対する入力としては、以下がある。ハンドル302からは操舵角が入力される。アクセルペダル303からは、全トルク指令値が入力される。ブレーキペダル304からはブレーキ量が入力される。サイドブレーキ305からはサイドブレーキ量が入力される。ギヤ306からはR,N,D等のシフトポジションが入力される。
Input to the controller 301 includes the following. A steering angle is input from the
また、各駆動輪FL,FR,RL,RRには、それぞれ回転速度Vを検出するセンサ307a〜307dが設けられ、各駆動輪FL,FR,RL,RRの回転速度Vfl,Vfr,Vrl,Vrrがコントローラ301に入力される。また、各駆動輪FL,FR,RL,RRには、それぞれタイヤが地面から受ける垂直抗力Nを検出するセンサ308a〜308dが設けられ、各駆動輪FL,FR,RL,RRの垂直抗力Nfl、Nfr,Nrl,Nrrがコントローラ301に入力される。
Each of the driving wheels FL, FR, RL, RR is provided with
また、移動体300には、加速度センサ309が設けられ、検出した加速度がコントローラ301に入力される。また、移動体300には、ヨーレートセンサ310が設けられ、検出したヨーレートがコントローラ301に入力される。
Further, the moving
コントローラ301は、上記の入力に基づき、各駆動輪FL,FR,RL,RRを駆動する。駆動のための制御信号は、各駆動輪FL,FR,RL,RR毎に適切にトルク配分され、インバータINVを介して各モータM1〜M4に供給される。 The controller 301 drives each driving wheel FL, FR, RL, RR based on the above input. A control signal for driving is appropriately distributed for each driving wheel FL, FR, RL, RR and supplied to each of the motors M1 to M4 via the inverter INV.
バッテリ312は、移動体300全体に対して電源供給する。特に、インバータINVを介して各駆動輪FL,FR,RL,RRのモータM1〜M4を駆動するための駆動源となる。このバッテリ312としては、ニッケル水素、リチウムイオン等の二次電池や燃料電池などが適用される。
The
上記のインバータINVは、移動体300の回生時に、モータM1〜M4が発電した交流電圧を直流電圧に変換し、その変換した直流電圧をバッテリ312へ供給することができる。この回生とは、移動体300を運転するドライバーによるブレーキペダル304の操作による発電や、走行中にアクセルペダル303の踏み込みを緩和することによる発電を示す。
The inverter INV can convert the AC voltage generated by the motors M <b> 1 to M <b> 4 into a DC voltage when the
ところで、駆動効率η=モータM出力/バッテリ312から供給する電力=(T×ω)/(V×I)で表される。
Incidentally, drive efficiency η = motor M output / power supplied from
(トルク配分装置のハードウェア構成)
次に、トルク配分装置400のハードウェア構成について説明する。図4は、トルク配分装置のハードウェア構成を示すブロック図である。図4において、トルク配分装置400は、CPU401、ROM402、RAM403、通信I/F415、GPSユニット416、各種センサ417を備えている。各構成部401〜417は、バス420によってそれぞれ接続されている。
(Hardware configuration of torque distribution device)
Next, the hardware configuration of the
CPU401は、トルク配分装置400の全体の制御を司る。ROM402は、ブートプログラム、トルク配分プログラムなどのプログラムが記録され、また、モータ効率マップなどを保持することができる。RAM403は、CPU401のワークエリアとして使用される。すなわち、CPU401は、RAM403をワークエリアとして使用しながら、ROM402に記録されたプログラムを実行することによって、トルク配分装置400の全体の制御を司る。
The
通信I/F415は、無線を介してネットワークに接続され、トルク配分装置400およびCPU401のインターフェースとして機能する。ネットワークとして機能する通信網には、公衆回線網や携帯電話網、DSRC(Dedicated Short Range Communication)、LAN、WANなどがある。通信I/F415は、たとえば、公衆回線用接続モジュールやETCユニット、FMチューナー、VICS(Vehicle Information and Communication System(登録商標))/ビーコンレシーバなどである。
The communication I /
GPSユニット416は、GPS衛星からの電波を受信し、移動体の現在位置を示す情報を出力する。GPSユニット416の出力情報は、後述する各種センサ417の出力値とともに、CPU401による移動体の現在位置の算出に際して利用される。現在位置を示す情報は、たとえば、緯度・経度、高度などの、地図データ上の1点を特定する情報である。
The
ここで、走行路面のスリップ率と摩擦係数(μ-λ)特性を移動体外部のサーバから取得する場合は、通信I/F415とGPSユニット416とを用いる。各種センサ417については、車体速度と垂直抗力の検出に用いる。車体速度は、例えば以下の方法により検出する。
1.加速度センサの出力を積分
2.非駆動輪の回転速度から算出
3.GPSやその他の位置センサの時間あたりの移動距離から算出
Here, when acquiring the slip ratio and friction coefficient (μ-λ) characteristic of the traveling road surface from a server outside the moving body, the communication I /
1. 1. Integrate acceleration sensor output. 2. Calculated from the rotational speed of non-driving wheels Calculated from distance traveled per hour by GPS and other position sensors
また、垂直抗力を検出するためには、各タイヤにそれぞれ設けた荷重センサを用いるか、あるいは以下の方法により検出する。
1.加速度センサ出力から重心位置のずれを求めて、前輪と後輪の荷重バランスを算出
2.ヨーレートセンサ出力から重心位置のずれを求めて、右輪と左輪の荷重バランスを算出
3.傾斜センサ(ジャイロ)出力から重心位置のずれを求めて、前輪と後輪および右輪と左輪の荷重バランスを算出
Further, in order to detect the vertical drag, a load sensor provided for each tire is used, or is detected by the following method.
1. 1. Calculate the load balance between the front and rear wheels by calculating the displacement of the center of gravity from the acceleration sensor output. 2. Calculate the load balance between the right and left wheels by calculating the deviation of the center of gravity from the output of the yaw rate sensor. Calculate the load balance between the front and rear wheels and the right and left wheels by calculating the deviation of the center of gravity from the tilt sensor (gyro) output.
図1に示したトルク配分装置100の算出部106、配分部107、制御部108は、上述したトルク配分装置400におけるROM402、RAM403、などに記録されたプログラムやデータを用いて、CPU401が所定のプログラムを実行し、トルク配分装置400における各部を制御することによってその機能を実現する。
The
(トルク配分装置によるトルク配分制御)
本実施例のトルク配分装置400は、駆動系効率が最大となる最適化をおこなう。各駆動輪に与えるトルクをT1,T2,T3,T4とし、効率をη1,η2,η3,η4とすると、4輪分の全体の効率ηは、下記式(1)で示される。
(Torque distribution control by torque distribution device)
The
η=(T1・η1+T2・η2+T3・η3+T4・η4)/T …(1)
(全駆動トルクT=T1+T2+T3+T4)
η = (T1 · η1 + T2 · η2 + T3 · η3 + T4 · η4) / T (1)
(Total drive torque T = T1 + T2 + T3 + T4)
図5は、モータ効率マップの一例を示す図である。横軸は回転速度、縦軸はトルクである。図5に示す、車体がある一定速度のときの直線状の動作線C上で得られる効率を用いて以下のような駆動輪選択を考える。
(1)4輪で等トルク駆動
(2)2輪で等トルク駆動
(3)1輪のみで駆動
FIG. 5 is a diagram illustrating an example of a motor efficiency map. The horizontal axis is the rotation speed, and the vertical axis is the torque. The following drive wheel selection is considered using the efficiency obtained on the linear operation line C when the vehicle body is at a certain speed shown in FIG.
(1) Equal torque drive with 4 wheels (2) Equal torque drive with 2 wheels (3) Drive with only 1 wheel
(1)4輪で等トルク駆動の場合(4輪に1/4(0.25)ずつトルク配分)
η1=0.25・0.77+0.25・0.77+0.25・0.77+0.25・0.77=0.77
(2)2輪で等トルク駆動の場合(2輪に1/2(0.5)ずつトルク配分)
η2=0.5・0.83+0.5・0.83+0+0=0.83
(3)1輪のみで駆動の場合(1輪だけに全て(1)のトルク配分)
η3=1・0.72+0+0+0=0.72
上記によれば、効率の高い領域でのトルクを多くするようなトルク配分をおこなうことにより、トータルの効率はよくなることがわかる。
(1) In the case of equal torque drive with 4 wheels (1/4 (0.25) torque distribution to 4 wheels)
η1 = 0.25 · 0.77 + 0.25 · 0.77 + 0.25 · 0.77 + 0.25 · 0.77 = 0.77
(2) In the case of equal torque drive with 2 wheels (1/2 (0.5) torque distribution to 2 wheels)
η2 = 0.5 · 0.83 + 0.5 · 0.83 + 0 + 0 = 0.83
(3) When driving with only one wheel (all (1) torque distribution for only one wheel)
η3 = 1 · 0.72 + 0 + 0 + 0 = 0.72
According to the above, it is understood that the total efficiency is improved by performing torque distribution that increases the torque in the high efficiency region.
ここでトルクと回転速度との関係について説明する。
各駆動輪の運動方程式と、駆動輪の駆動力は下記式(2),(3),(4)に示される。
Here, the relationship between torque and rotational speed will be described.
The equation of motion of each driving wheel and the driving force of the driving wheel are shown in the following formulas (2), (3), and (4).

(Tm:モータへのトルク指令値、Td:駆動輪の駆動トルク、Fd:駆動力、Jw:駆動輪の慣性モーメント、μ:路面とタイヤの摩擦係数、N:垂直抗力、r:タイヤ半径)
ここで、駆動輪の駆動トルクとは、駆動輪に搭載しているモータのトルクを意味している。
急加速や急減速をおこなわない場合は、速度の変化が緩やかであるため、回転速度の変化が少ないので、下記式(5)のようになる。
dω/dt≒0 …(5)
ゆえに、モータへのトルク指令値Tmと駆動輪の駆動トルクTdがほぼ等しくなり、
∴Tm≒Td=Fd・r=μ・N・r
以下、車両の速度の変化が緩やかであり、モータへのトルク指令値Tmと駆動輪の駆動トルクTdがほぼ等しい状態であるものとして説明を進める。
(Tm: torque command value to motor, Td: driving torque of driving wheel, Fd: driving force, Jw: moment of inertia of driving wheel, μ: coefficient of friction between road surface and tire, N: vertical drag, r: tire radius)
Here, the driving torque of the driving wheel means the torque of the motor mounted on the driving wheel.
When rapid acceleration or rapid deceleration is not performed, the change in speed is gentle and the change in rotational speed is small, so the following equation (5) is obtained.
dω / dt≈0 (5)
Therefore, the torque command value Tm to the motor and the drive torque Td of the drive wheel are substantially equal,
∴Tm≈Td = Fd · r = μ · N · r
In the following description, it is assumed that the change in the speed of the vehicle is gentle and the torque command value Tm to the motor and the drive torque Td of the drive wheels are substantially equal.
図6は、スリップ率と摩擦係数の関係を示す図である。横軸はスリップ率λ、縦軸は摩擦係数μである。スリップ率λと摩擦係数μは図6に示す関係にあり、下記式(6)で近似できる。図6に示す特性図において、スリップ率λが0.2において最も摩擦係数μが高い。スリップ率λが1のときには駆動輪が空転している状態に相当する。そして、スリップ率λが0〜0.2の範囲内で収まる制御をおこなうことにより、駆動輪が空転せずに走行できる。なお、図6で示した特性は、μの最大値やμが最大となるλの値がタイヤや路面状態によって変化する。その場合でも、下記式(6)のパラメータB、C、D、Eの値を変更することで近似できる。ただし、一般的に、タイヤやアスファルト路面は、その物理特性が急激に変化することは少ないため、走行中のμ−λ特性の変化は緩やかなものである。 FIG. 6 is a diagram showing the relationship between the slip ratio and the friction coefficient. The horizontal axis represents the slip ratio λ, and the vertical axis represents the friction coefficient μ. The slip ratio λ and the friction coefficient μ have the relationship shown in FIG. In the characteristic diagram shown in FIG. 6, the friction coefficient μ is the highest when the slip ratio λ is 0.2. When the slip ratio λ is 1, this corresponds to a state where the driving wheel is idling. Then, by performing the control so that the slip ratio λ falls within the range of 0 to 0.2, the drive wheels can travel without idling. In the characteristics shown in FIG. 6, the maximum value of μ and the value of λ that maximizes μ vary depending on the tire and the road surface condition. Even in that case, it can be approximated by changing the values of parameters B, C, D, and E in the following equation (6). However, in general, the physical characteristics of tires and asphalt road surfaces are unlikely to change rapidly, so that the change in μ-λ characteristics during running is gradual.
また、λ=(r・ω−v)/(r・ω)=1−v/(r・ω) …(7)
であるから、Tdは、下記式(8)となる。
Λ = (r · ω−v) / (r · ω) = 1−v / (r · ω) (7)
Therefore, Td is represented by the following formula (8).
Td=Fd・r=μ・N・r …(8) Td = Fd · r = μ · N · r (8)
急加速や急減速をおこなわない場合は、速度の変化が緩やかであるため、車体速度vがほぼ一定と見なせ、Tdとωとの関係は上記式(8)により求めることができる。 When rapid acceleration or rapid deceleration is not performed, the speed change is gentle, so that the vehicle body speed v can be regarded as substantially constant, and the relationship between Td and ω can be obtained by the above equation (8).
図7は、スリップ率を考慮した回転速度とトルクの関係を示す図である。上記式に基づきトルクと回転速度を計算した状態を示す。ここで、垂直抗力N:400[kg]×9.8[m/s2]、タイヤ半径r:0.3[m]、車体速度v=25,50,75,100[km/h]とした。 FIG. 7 is a diagram showing the relationship between the rotational speed and the torque in consideration of the slip ratio. The state which calculated the torque and the rotational speed based on the said formula is shown. Here, vertical drag N: 400 [kg] × 9.8 [m / s 2 ], tire radius r: 0.3 [m], vehicle speed v = 25, 50, 75, 100 [km / h] did.
したがって、トルク配分を変更することにより、駆動輪のトルクが変化すると、対応して回転速度が変化することになる。図7に示す各車体速度別の特性線は、直線状ではなく、いずれもトルクが高くなるにつれて傾きが緩やかになり、最大トルクの状態で飽和する変化曲線となる。 Accordingly, when the torque of the drive wheels changes by changing the torque distribution, the rotational speed changes correspondingly. The characteristic lines for the respective vehicle speeds shown in FIG. 7 are not linear, and all of them become a change curve that becomes gradual as the torque increases and saturates at the maximum torque.
図8は、図7に示す変化曲線をモータ効率マップに重ねた状態を示す図である。横軸は回転速度ω、縦軸はトルクTdである。この実施例では、モータ効率マップは、モータMだけの特性ではなく、駆動系に含まれるインバータINVの特性(効率)も含んだ特性を示すものとしている。 FIG. 8 is a diagram showing a state where the change curve shown in FIG. 7 is superimposed on the motor efficiency map. The horizontal axis represents the rotational speed ω, and the vertical axis represents the torque Td. In this embodiment, the motor efficiency map shows not only the characteristics of the motor M but also the characteristics including the characteristics (efficiency) of the inverter INV included in the drive system.
図8に示すように、ある速度(たとえば75[km/h])の動作線Cにおいて、一つの駆動輪のトルクが点aにあったときに、その駆動輪のトルクをトルク配分の変更により、大きく変化させたときには、動作線C上で他のb点やc点に移動する。その際、動作線Cが傾いているから回転速度ωの値も増加していることになる。したがって、回転速度ωの変化を考慮せずに、トルク配分をおこなうと、正確な動作点がわからないため、効率の値に誤差を生じることになる。したがって、図8に示すように、モータ効率マップ上には、車体速度毎の動作線を引き、トルク−効率の関係を求めておくことにより、トルク配分を変化させた場合でも効率を正確に算出できるようになる。 As shown in FIG. 8, when the torque of one driving wheel is at point a on the operation line C at a certain speed (for example, 75 [km / h]), the torque of the driving wheel is changed by changing the torque distribution. When it is changed greatly, it moves to other points b and c on the operation line C. At this time, since the operation line C is inclined, the value of the rotational speed ω is also increased. Therefore, if torque distribution is performed without considering the change in the rotational speed ω, an accurate operating point is not known, and an error occurs in the efficiency value. Therefore, as shown in FIG. 8, the efficiency is accurately calculated even when the torque distribution is changed by drawing an operation line for each vehicle speed on the motor efficiency map and obtaining the torque-efficiency relationship. become able to.
図9−1および図9−2は、車体速度毎に異なるトルクと効率との関係を示す図である。図9−1は、50[km/h]のときの動作線におけるトルク−効率特性であり、図9−2は、75[km/h]のときの動作線における、トルク−効率特性である。 FIGS. 9A and 9B are diagrams illustrating the relationship between torque and efficiency that differ for each vehicle body speed. 9A is a torque-efficiency characteristic on the operation line at 50 [km / h], and FIG. 9-2 is a torque-efficiency characteristic on the operation line at 75 [km / h]. .
また、図9−1に対応する動作線を6次で近似した効率ηは、
η = -1.7088E-14Td6 + 1.8521E-11Td5 - 7.9786E-09Td4 + 1.7336E-06Td3 - 2.0447E-04Td2 + 1.1782E-02Td + 4.4673E-01 …(9)
また、図9−2に対応する動作線を6次で近似した効率ηは、
η = 1.1253E-14Td6 - 1.0197E-11Td5 + 3.2448E-09Td4 - 3.5952E-07Td3 - 2.6286E-05Td2 + 7.8911E-03Td + 4.9954E-01 …(10)
となる。
Further, the efficiency η obtained by approximating the operation line corresponding to FIG.
η = -1.7088E-14Td 6 + 1.8521E -11Td 5 - 7.9786E-09Td 4 + 1.7336E-06Td 3 - 2.0447E-04Td 2 + 1.1782E-02Td + 4.4673E-01 ... (9)
Further, the efficiency η obtained by approximating the operation line corresponding to FIG.
η = 1.1253E-14Td 6 - 1.0197E -11Td 5 + 3.2448E-09Td 4 - 3.5952E-07Td 3 - 2.6286E-05Td 2 + 7.8911E-03Td + 4.9954E-01 ... (10)
It becomes.
上記の近似式のトルクTdに値を代入すれば、効率ηを得ることができる。上記式(1)によれば、4輪駆動の場合、T1+T2+T3+T4=T(全トルク指令値)の条件範囲で、T1・η1+T2・η2+T3・η3+T4・η4が最大となるのが最適効率となる。 If a value is substituted for the torque Td in the above approximate expression, the efficiency η can be obtained. According to the above equation (1), in the case of four-wheel drive, the optimum efficiency is that T1 · η1 + T2 · η2 + T3 · η3 + T4 · η4 is maximized in the condition range of T1 + T2 + T3 + T4 = T (total torque command value).
次に、上述したスリップ率の算出方法について説明する。スリップ率λは下記式(11)で定義される。 Next, a method for calculating the slip ratio described above will be described. The slip ratio λ is defined by the following formula (11).
ここで、(v:移動体速度、vw:駆動輪速度、ω:駆動輪回転速度、r:タイヤ半径)なお、vとvwの大きい方が分母となるため、加速時には分母が上記のようにvwとなり、減速時には、分母がvとなる。移動体速度、駆動輪速度、および駆動輪回転速度の違いについて補足説明する。タイヤの回転速度にタイヤの半径を乗ずると、タイヤの移動速度になる。モータを駆動して走行しているときは、タイヤの速度は自動車の速度よりも速くなる。一方、モータを制動させて走行している場合は、タイヤの速度は自動車の速度よりも遅くなる。タイヤの速度と自動車の速度の関係を示したものがスリップ率であり、下記式(12)となる。 Here, (v: moving body speed, v w : driving wheel speed, ω: driving wheel rotation speed, r: tire radius) Since the larger of v and v w is the denominator, the denominator is Vw , and at the time of deceleration, the denominator becomes v. A supplementary explanation will be given of the difference between the moving body speed, the drive wheel speed, and the drive wheel rotation speed. Multiplying the tire rotational speed by the tire radius gives the tire moving speed. When driving with the motor driven, the tire speed is higher than the car speed. On the other hand, when the vehicle is running with the motor braked, the tire speed is slower than the automobile speed. The relationship between the speed of the tire and the speed of the automobile is the slip ratio, which is expressed by the following formula (12).
スリップ率=(車輪速度−車体速度)/車体速度と車輪速度の大きい方
λ=(vw−v)/Max(vw,v) …(12)
なお、駆動も制動もしないモータの車輪は、スリップ率がほぼゼロとなるため、この車輪の速度は車体速度とほぼ等しくなる(vw≒v)。
Slip rate = (wheel speed−vehicle speed) / body speed and wheel speed, whichever is greater λ = (v w −v) / Max (v w , v) (12)
The wheel of the motor that is neither driven nor braked has a slip ratio of almost zero, so the speed of this wheel is substantially equal to the vehicle body speed (v w ≈v).
駆動輪の回転速度は、モータMのレゾルバや、エンコーダ、ホール素子等のパルス出力信号を用いて算出できる。移動体の速度は、1.非駆動輪のスリップ率がほぼゼロであるため、非駆動輪の速度を車体速度として検出する、2.加速度センサの出力を積分して車体速度を求める、3.車体位置をセンサで検出し時間あたりの移動距離速度を求める、等が考えられる。 The rotational speed of the drive wheel can be calculated using a pulse output signal from a resolver, encoder, Hall element, or the like of the motor M. The speed of the moving body is as follows: 1. Since the slip ratio of the non-driving wheels is almost zero, the speed of the non-driving wheels is detected as the vehicle body speed. 2. Obtain the vehicle speed by integrating the output of the acceleration sensor. For example, the position of the vehicle body is detected by a sensor to determine the moving distance speed per time.
(トルク配分例について)
図10は、トルクと効率との関係を示す図である。図9−1、図9−2と同様に横軸がトルク、縦軸が効率である。この図10に示すように、動作線上で効率ηが最も高い点を最適効率トルク値Toとする。また、動作線上で最適効率トルク値Toの2倍のトルクに対応した効率を2Toと表記する。
(Example of torque distribution)
FIG. 10 is a diagram illustrating the relationship between torque and efficiency. As in FIGS. 9-1 and 9-2, the horizontal axis represents torque and the vertical axis represents efficiency. As shown in FIG. 10, the point with the highest efficiency η on the operating line is defined as the optimum efficiency torque value To. In addition, the efficiency corresponding to the torque twice the optimum efficiency torque value To on the operation line is expressed as 2To.
(モータ効率マップ上での動作線の特性について)
ここで、モータ毎に固有のトルク−効率特性に対するトルク配分について説明する。上述した図9−1、図9−2等のトルク−効率特性は、モータM毎に固有の特性線を有している。図11−1〜図11−3は、それぞれモータに固有のトルク−効率特性を示す図であり、図11−1は逆U型、図11−2は△型、図11−3は人型と略称する。単純化のために、駆動輪が2輪である場合のトルク配分で考える。全トルク指令値Tを2輪で配分するときの効率ηは、上記式(1)に基づき、
η=(T1・η1+T2・η2)/T …(13)
(駆動輪1のトルク:T1,そのときの効率:η1、駆動輪2のトルク:T2,そのときの効率:η2)
となる。
(Characteristics of operation line on motor efficiency map)
Here, torque distribution with respect to the torque-efficiency characteristic specific to each motor will be described. The torque-efficiency characteristics in FIGS. 9-1 and 9-2 described above have characteristic lines that are unique to each motor M. 11-1 to 11-3 are diagrams showing torque-efficiency characteristics specific to the motor. FIG. 11-1 is an inverted U type, FIG. 11-2 is a Δ type, and FIG. 11-3 is a human type. Abbreviated. For simplification, the torque distribution when there are two drive wheels is considered. The efficiency η when the total torque command value T is distributed by two wheels is based on the above equation (1).
η = (T1 · η1 + T2 · η2) / T (13)
(Torque of driving wheel 1: T1, efficiency at that time: η1, torque of driving wheel 2: T2, efficiency at that time: η2)
It becomes.
たとえば、全トルク指令値Tが160[Nm]の場合は、(T1,T2)=(100,60)や(80,80)等、多数の組み合わせがあるが、それぞれのトルク値を上記式(13)に代入することで、効率を算出することができる。よって、効率が最大となるトルク値の組み合わせを選択できればよいことになる。具体例を下記に説明する。 For example, when the total torque command value T is 160 [Nm], there are many combinations such as (T1, T2) = (100, 60) and (80, 80). By substituting into 13), the efficiency can be calculated. Therefore, it is only necessary to select a combination of torque values that maximizes efficiency. A specific example will be described below.
図12−1〜図12−6は、それぞれ逆U型のトルク−効率特性における各輪の特性を示す図である。図12−1は、全トルク指令値Tが100[Nm]であり、(T1,T2)=(0,100)、(100,0)のときに効率ηが最大となる。なお、トータル効率は、上記式(13)に代入して得た特性である。図12−2は、全トルク指令値Tが120[Nm]であり、(T1,T2)=(0,120),(120,0)のときに効率ηが最大となる。図12−3は、全トルク指令値Tが140[Nm]であり、(T1,T2)=(0,140),(140,0)のときに効率ηが最大となる。図12−4は、全トルク指令値Tが160[Nm]であり、(T1,T2)=(80,80)のときに効率ηが最大となる。図12−5は、全トルク指令値Tが180[Nm]であり、(T1,T2)=(90,90)のときに効率ηが最大となる。図12−6は、全トルク指令値Tが200[Nm]であり、(T1,T2)=(100,100)のときに効率ηが最大となる。 12-1 to 12-6 are graphs showing the characteristics of the respective wheels in the inverted-U type torque-efficiency characteristics. In FIG. 12A, the total torque command value T is 100 [Nm], and the efficiency η is maximized when (T1, T2) = (0, 100), (100, 0). The total efficiency is a characteristic obtained by substituting into the above equation (13). 12-2, the total torque command value T is 120 [Nm], and the efficiency η is maximized when (T1, T2) = (0, 120), (120, 0). In FIG. 12-3, the total torque command value T is 140 [Nm], and the efficiency η is maximized when (T1, T2) = (0, 140), (140, 0). In FIG. 12-4, the total torque command value T is 160 [Nm], and the efficiency η is maximized when (T1, T2) = (80, 80). In FIG. 12-5, the total torque command value T is 180 [Nm], and the efficiency η is maximized when (T1, T2) = (90, 90). In FIG. 12-6, the total torque command value T is 200 [Nm], and the efficiency η is maximized when (T1, T2) = (100, 100).
図13−1〜図13−6は、それぞれ△型のトルク−効率特性における各輪の特性を示す図である。図13−1は、全トルク指令値Tが100[Nm]であり、(T1,T2)=(0,100)、(100,0)のときに効率ηが最大となる。図13−2は、全トルク指令値Tが120[Nm]であり、(T1,T2)=(0,120)、(120,0)のときに効率ηが最大となる。図13−3は、全トルク指令値Tが140[Nm]であり、(T1,T2)=(40,100)、(100,40)のときに効率ηが最大となる。図13−4は、全トルク指令値Tが160[Nm]であり、(T1,T2)=(60,100)、(100,60)のときに効率ηが最大となる。図13−5は、全トルク指令値Tが180[Nm]であり、(T1,T2)=(80,100)、(100,80)のときに効率ηが最大となる。図13−6は、全トルク指令値Tが200[Nm]であり、(T1,T2)=(100,100)のときに効率ηが最大となる。 FIGS. 13-1 to 13-6 are graphs showing the characteristics of the respective wheels in the Δ-type torque-efficiency characteristics. In FIG. 13A, the total torque command value T is 100 [Nm], and the efficiency η is maximized when (T1, T2) = (0, 100), (100, 0). In FIG. 13B, the total torque command value T is 120 [Nm], and the efficiency η is maximized when (T1, T2) = (0, 120), (120, 0). In FIG. 13C, the total torque command value T is 140 [Nm], and the efficiency η is maximized when (T1, T2) = (40, 100), (100, 40). In FIG. 13-4, the total torque command value T is 160 [Nm], and the efficiency η is maximized when (T1, T2) = (60, 100), (100, 60). In FIG. 13-5, the total torque command value T is 180 [Nm], and the efficiency η is maximized when (T1, T2) = (80, 100), (100, 80). In FIG. 13-6, the total torque command value T is 200 [Nm], and the efficiency η is maximized when (T1, T2) = (100, 100).
図14−1〜図14−6は、それぞれ人型のトルク−効率特性における各輪の特性を示す図である。図14−1は、全トルク指令値Tが100[Nm]であり、(T1,T2)=(0,100)、(100,0)のときに効率ηが最大となる。図14−2は、全トルク指令値Tが120[Nm]であり、(T1,T2)=(20,100)、(100,20)のときに効率ηが最大となる。図14−3は、全トルク指令値Tが140[Nm]であり、(T1,T2)=(40,100)、(100,40)のときに効率ηが最大となる。図14−4は、全トルク指令値Tが160[Nm]であり、(T1,T2)=(60,100)、(100,60)のときに効率ηが最大となる。図14−5は、全トルク指令値Tが180[Nm]であり、(T1,T2)=(80,100)、(100,80)のときに効率ηが最大となる。図14−6は、全トルク指令値Tが200[Nm]であり、(T1,T2)=(100,100)のときに効率ηが最大となる。 FIGS. 14-1 to 14-6 are diagrams illustrating the characteristics of the respective wheels in the human-type torque-efficiency characteristics. In FIG. 14A, the total torque command value T is 100 [Nm], and the efficiency η is maximized when (T1, T2) = (0, 100), (100, 0). 14-2, the total torque command value T is 120 [Nm], and the efficiency η is maximized when (T1, T2) = (20, 100), (100, 20). 14C, the total torque command value T is 140 [Nm], and the efficiency η is maximized when (T1, T2) = (40, 100), (100, 40). In FIG. 14-4, the total torque command value T is 160 [Nm], and the efficiency η is maximized when (T1, T2) = (60, 100), (100, 60). In FIG. 14-5, the total torque command value T is 180 [Nm], and the efficiency η is maximized when (T1, T2) = (80, 100), (100, 80). In FIG. 14-6, the total torque command value T is 200 [Nm], and the efficiency η is maximized when (T1, T2) = (100, 100).
以上のことから、効率ηが最大となる組み合わせは、以下のいずれかとなる。
(T1,T2)=(0,T)、(T,0)、(To,T−To)、(T−To,To)、(T/2,T/2) …(14)
(To:最適効率トルク値)
ゆえに、トルク−効率特性の曲線形状が図11−1〜図11−3のいずれのタイプであったとしても、上記(14)の組合せの中に、効率ηが最大となる組合せが存在することに着目した。
From the above, the combination that maximizes the efficiency η is one of the following.
(T1, T2) = (0, T), (T, 0), (To, T-To), (T-To, To), (T / 2, T / 2) (14)
(To: optimal efficiency torque value)
Therefore, even if the curve shape of the torque-efficiency characteristic is any of the types shown in FIGS. 11-1 to 11-3, there is a combination that maximizes the efficiency η among the combinations of (14). Focused on.
つまり、トルク−効率特性の曲線形状が明確でない場合でも、上記(14)に示す組み合わせを計算した結果が最大となる組み合わせが、効率ηを最大にするトルク配分の組み合わせとなる。トルク−効率特性が複雑な曲線形状である場合は、上記(14)の組み合わせ以外が最大効率になることも考えられるが、変極点の多い複雑な特性以外であれば上記(14)に示した組み合わせ中に最大効率をとるものがある。すなわち、トルク配分の組み合わせは無数に存在するが、上記(14)に示した組み合わせを計算するだけで、最適なトルク配分値を求めることが可能となる。なお、上記例では2輪に対するトルク配分を例に説明したが、4輪等の複数の駆動輪に対するトルク配分についても同様である。 That is, even when the curve shape of the torque-efficiency characteristic is not clear, the combination that maximizes the result of calculating the combination shown in (14) is the torque distribution combination that maximizes the efficiency η. When the torque-efficiency characteristic is a complicated curve shape, it is conceivable that the efficiency other than the combination of (14) is the maximum efficiency. Some combinations have maximum efficiency. That is, there are an infinite number of combinations of torque distribution, but it is possible to obtain an optimal torque distribution value only by calculating the combination shown in (14) above. In the above example, torque distribution for two wheels has been described as an example, but the same applies to torque distribution for a plurality of drive wheels such as four wheels.
これにより、以下に説明する図15−1〜図15−5に示す配分の中にηが最大になる組合せがある。また、逆U型のトルク−効率特性を示すモータ効率マップが多いため、後述する図16−1と図16−2で説明するトルク配分の簡略化が可能となる。 Accordingly, there is a combination in which η is maximized in the distribution shown in FIGS. 15-1 to 15-5 described below. In addition, since there are many motor efficiency maps showing the torque-efficiency characteristics of the inverted U type, it is possible to simplify the torque distribution described in FIGS. 16-1 and 16-2 described later.
モータMの個数をn個(nは自然数)とすると、配分部107は、
(1)全トルク指令値Tが最適効率トルク値To未満の場合には、一のモータMのトルク配分値に全トルク指令値Tを配分する。
When the number of motors M is n (n is a natural number), the
(1) When the total torque command value T is less than the optimum efficiency torque value To, the total torque command value T is distributed to the torque distribution value of one motor M.
(2)全トルク指令値Tが、最適効率トルク値To以上、かつ、最適効率トルク値Toのn倍未満の場合には、下記(a)〜(c)のいずれかでトルク配分する。この際、(a)〜(c)のいずれかのうち、最適な駆動系効率を有するものを選択する。
(a)一部のモータMのそれぞれのトルク配分値に最適効率トルク値Toを配分し、さらに全トルク指令値Tを最適効率トルク値Toで割った余りを1個、あるいはn個のモータMのいずれかに均等に割って配分する。
(b)一部のモータMのそれぞれのトルク配分値に最適効率トルク値Toを配分し、さらに他のモータMのそれぞれのトルク配分値に一部のモータMに配分した残りを均等に割って配分する。
(c)全てのモータMのそれぞれに全トルク指令値Tを均等に割って配分する。
(2) When the total torque command value T is equal to or greater than the optimum efficiency torque value To and less than n times the optimum efficiency torque value To, torque is distributed according to any of the following (a) to (c). At this time, one having the optimum drive system efficiency is selected from any one of (a) to (c).
(A) The optimal efficiency torque value To is distributed to the torque distribution values of some motors M, and the remainder obtained by dividing the total torque command value T by the optimal efficiency torque value To is one or n motors M Divide evenly into any of these and distribute.
(B) The optimal efficiency torque value To is allocated to the torque distribution values of some motors M, and the remainder allocated to some motors M is equally divided into the torque distribution values of other motors M. To distribute.
(C) All torque command values T are equally divided and distributed to all the motors M.
(3)全トルク指令値Tが最適効率トルク値Toのn倍以上の場合には、n個のモータMのそれぞれのトルク配分値に最適効率トルク値Toを配分し、さらに全トルク指令値Tを最適効率トルク値Toで割った余りを1個、あるいはn個のモータMのいずれかに均等に割って配分したうち、最適な駆動系効率を有する組み合わせを選択する。 (3) When the total torque command value T is not less than n times the optimal efficiency torque value To, the optimal efficiency torque value To is distributed to the respective torque distribution values of the n motors M, and the total torque command value T Is divided by one or n motors M evenly and distributed, and the combination having the optimum drive system efficiency is selected.
図15−1〜図15−5は、それぞれ駆動輪が4つの場合におけるトルク配分を説明するための図である。配分部107により、n=4の各モータMに配分する配分例を説明する。
15-1 to 15-5 are diagrams for explaining torque distribution in the case where there are four drive wheels. A distribution example in which the
(T<Toのとき)
図15−1に示すように、全トルク指令値Tが最適効率トルク値To未満の場合には、一のモータのトルク配分値に前記全トルク指令値Tを配分する。
(When T <To)
As shown in FIG. 15A, when the total torque command value T is less than the optimum efficiency torque value To, the total torque command value T is distributed to the torque distribution value of one motor.
(To≦T<2Toのとき)
また、図15−2に示すように、全トルク指令値Tが最適効率トルク値To以上、かつ最適効率トルク値Toの2倍未満の場合には、(a)〜(c)のいずれかのうち、最適な駆動系効率を有する組み合わせを選択する。
(a)いずれか一のモータのトルク配分値に全トルク指令値Tを配分する。
(b)いずれか一のモータのトルク配分値に最適効率トルク値Toを配分し、別の一のモータのトルク配分値に残りのトルク値を配分する。
(c)いずれか2個のモータのそれぞれのトルク配分値に前記全トルク指令値Tの1/2を配分する。
(When To ≦ T <2To)
As shown in FIG. 15-2, when the total torque command value T is equal to or greater than the optimum efficiency torque value To and less than twice the optimum efficiency torque value To, any one of (a) to (c) Of these, the combination having the optimum drive system efficiency is selected.
(A) All torque command values T are distributed to the torque distribution values of any one of the motors.
(B) The optimum efficiency torque value To is distributed to the torque distribution value of any one motor, and the remaining torque value is distributed to the torque distribution value of another motor.
(C) Distribute 1/2 of the total torque command value T to each of the torque distribution values of any two motors.
(2To≦T<3Toのとき)
また、図15−3に示すように、全トルク指令値Tが最適効率トルク値Toの2倍以上、かつ最適効率トルク値Toの3倍未満の場合には、(a)〜(e)のいずれかのうち、最適な駆動系効率を有する組み合わせを選択する。
(a)いずれか一のモータのトルク配分値に最適効率トルク値Toを配分し、別の一のモータのトルク配分値に残りのトルク値を配分する。
(b)いずれか2個のモータのそれぞれのトルク配分値に全トルク指令値Tの1/2を配分する。
(c)いずれか2個のモータのそれぞれのトルク配分値に最適効率トルク値Toを配分し、別の一のモータのトルク配分値に残りのトルク値を配分する。
(d)いずれか一のモータのトルク配分値に最適効率トルク値Toを配分し、残りの2個のモータのそれぞれのトルク配分値に残りのトルク値の1/2を配分する。
(e)いずれか3個のモータのそれぞれのトルク配分値に全トルク指令値Tの1/3を配分する。
(When 2To ≦ T <3To)
Further, as shown in FIG. 15C, when the total torque command value T is not less than twice the optimum efficiency torque value To and less than three times the optimum efficiency torque value To, (a) to (e) Among these, the combination having the optimum drive system efficiency is selected.
(A) The optimum efficiency torque value To is distributed to the torque distribution value of any one motor, and the remaining torque value is distributed to the torque distribution value of another motor.
(B) Distribute 1/2 of the total torque command value T to each of the torque distribution values of any two motors.
(C) The optimal efficiency torque value To is distributed to the torque distribution values of any two motors, and the remaining torque value is distributed to the torque distribution value of another motor.
(D) The optimum efficiency torque value To is allocated to the torque distribution value of any one of the motors, and ½ of the remaining torque value is allocated to the torque distribution values of the remaining two motors.
(E) Distribute 1/3 of the total torque command value T to each of the torque distribution values of any three motors.
(3To≦T<4Toのとき)
また、図15−4に示すように、全トルク指令値Tが最適効率トルク値Toの3倍以上、かつ最適効率トルク値Toの4倍未満の場合には、(a)〜(g)のいずれかのうち、最適な駆動系効率を有する組み合わせを選択する。
(a)いずれか2個のモータのそれぞれのトルク配分値に最適効率トルク値Toを配分し、残りのうち一のモータのトルク配分値に残りのトルク値を配分する。
(b)いずれか一のモータのトルク配分値に最適効率トルク値Toを配分し、残りの2個のモータのそれぞれのトルク配分値に残りのトルク値の1/2を配分する。
(c)いずれか3個のモータのそれぞれのトルク配分値に、全トルク指令値Tの1/3を配分する。
(d)いずれか3個のモータのそれぞれのトルク配分値に最適効率トルク値Toを配分し、残りのモータのトルク配分値に残りのトルク値を配分する。
(e)いずれか2個のモータのトルク配分値に最適効率トルク値Toを配分し、残りの2個のモータのそれぞれのトルク配分値に残りのトルク値の1/2を配分する。
(f)いずれか一のモータのトルク配分値に最適効率トルク値Toを配分し、残りの3個のモータのそれぞれのトルク配分値に残りのトルク値の1/3を配分する。
(g)4個のモータのそれぞれのトルク配分値に、全トルク指令値Tの1/4を配分する。
(When 3To ≦ T <4To)
As shown in FIG. 15-4, when the total torque command value T is not less than three times the optimum efficiency torque value To and less than four times the optimum efficiency torque value To, (a) to (g) Among these, the combination having the optimum drive system efficiency is selected.
(A) The optimal efficiency torque value To is distributed to the torque distribution values of any two motors, and the remaining torque value is distributed to the torque distribution value of one of the remaining motors.
(B) The optimum efficiency torque value To is allocated to the torque distribution value of any one of the motors, and ½ of the remaining torque value is allocated to the torque distribution values of the remaining two motors.
(C) Distribute 1/3 of the total torque command value T to each of the torque distribution values of any three motors.
(D) The optimum efficiency torque value To is distributed to the torque distribution values of any three motors, and the remaining torque values are distributed to the torque distribution values of the remaining motors.
(E) The optimum efficiency torque value To is distributed to the torque distribution values of any two motors, and ½ of the remaining torque values are allocated to the torque distribution values of the remaining two motors.
(F) The optimum efficiency torque value To is allocated to the torque distribution value of any one of the motors, and 1/3 of the remaining torque values are allocated to the torque distribution values of the remaining three motors.
(G) Distribute 1/4 of the total torque command value T to the torque distribution values of the four motors.
(4To≦Tのとき)
また、図15−5に示すように、全トルク指令値Tが最適効率トルク値Toのn(4)倍以上の場合には、(a)〜(d)のうち、最適な駆動系効率を有する組み合わせを選択する。
(a)いずれか3個のモータのそれぞれのトルク配分値に最適効率トルク値Toを配分し、残りの一のモータのトルク配分値に残りのトルク値を配分する。
(b)いずれか2個のモータのトルク配分値に最適効率トルク値Toを配分し、残りの2個のモータのそれぞれのトルク配分値に残りのトルク値の1/2を配分する。
(c)いずれか一のモータのトルク配分値に最適効率トルク値Toを配分し、残りの3個のモータのそれぞれのトルク配分値に残りのトルク値の1/3を配分する。
(d)4個のモータのそれぞれのトルク配分値に、全トルク指令値Tの1/4を配分する。
(When 4To ≦ T)
As shown in FIG. 15-5, when the total torque command value T is n (4) times or more of the optimum efficiency torque value To, the optimum drive system efficiency among (a) to (d) is obtained. Select the combination you have.
(A) The optimal efficiency torque value To is distributed to the torque distribution values of any three motors, and the remaining torque values are distributed to the torque distribution values of the remaining one motor.
(B) The optimum efficiency torque value To is allocated to the torque distribution values of any two motors, and 1/2 of the remaining torque values are allocated to the torque distribution values of the remaining two motors.
(C) The optimal efficiency torque value To is allocated to the torque distribution value of any one of the motors, and 1/3 of the remaining torque values are allocated to the torque distribution values of the remaining three motors.
(D) Distribute 1/4 of the total torque command value T to the torque distribution values of the four motors.
上記の各配分例を数式で示すと下記のようになる。
(T<Toのとき)
T1=T,T2=T3=T4=0
Each of the above distribution examples is represented by mathematical formulas as follows.
(When T <To)
T1 = T, T2 = T3 = T4 = 0
(To≦T<2Toのとき)
以下の(a)〜(c)の3通りで効率を計算し、最適な効率となる組み合わせを選択する。
(a)T1=To+(T−To),T2=T3=T4=0
(b)T1=To,T2=To−(2To−T),T3=T4=0
(c)T1=T2=To−(2To−T)/2,T3=T4=0
(When To ≦ T <2To)
Efficiency is calculated in the following three ways (a) to (c), and a combination that provides optimum efficiency is selected.
(A) T1 = To + (T−To), T2 = T3 = T4 = 0
(B) T1 = To, T2 = To− (2To−T), T3 = T4 = 0
(C) T1 = T2 = To- (2To-T) / 2, T3 = T4 = 0
(2To≦T<3Toのとき)
以下の(a)〜(e)の5通りで効率を計算し、最適な効率となる組み合わせを選択する。
(a)T1=To+(T−2To),T2=To,T3=T4=0
(b)T1=T2=To+(T−2To)/2,T3=T4=0
(c)T1=T2=To,T3=To−(3To−T),T4=0
(d)T1=To,T2=T3=To−(3To−T)/2,T4=0
(e)T1=T2=T3=To−(3To−T)/3,T4=0
(When 2To ≦ T <3To)
Efficiency is calculated in the following five ways (a) to (e), and a combination that provides the optimum efficiency is selected.
(A) T1 = To + (T-2To), T2 = To, T3 = T4 = 0
(B) T1 = T2 = To + (T-2To) / 2, T3 = T4 = 0
(C) T1 = T2 = To, T3 = To− (3To−T), T4 = 0
(D) T1 = To, T2 = T3 = To- (3To-T) / 2, T4 = 0
(E) T1 = T2 = T3 = To- (3To-T) / 3, T4 = 0
(3To≦T<4Toのとき)
以下の(a)〜(g)の7通りで効率を計算し、最適な効率となる組み合わせを選択する。
(a)T1=To+(T−3To),T2=T3=To,T4=0
(b)T1=T2=To+(T−3To)/2,T3=To,T4=0
(c)T1=T2=T3=To+(T−3To)/3,T4=0
(d)T1=T2=T3=To,T4=To−(4To−T)
(e)T1=T2=To,T3=T4=To−(4To−T)/2
(f)T1=To,T2=T3=T4=To−(4To−T)/3
(g)T1=T2=T3=T4=To−(4To−T)/4
(When 3To ≦ T <4To)
Efficiency is calculated in the following seven ways (a) to (g), and a combination that provides the optimum efficiency is selected.
(A) T1 = To + (T-3To), T2 = T3 = To, T4 = 0
(B) T1 = T2 = To + (T-3To) / 2, T3 = To, T4 = 0
(C) T1 = T2 = T3 = To + (T-3To) / 3, T4 = 0
(D) T1 = T2 = T3 = To, T4 = To- (4To-T)
(E) T1 = T2 = To, T3 = T4 = To- (4To-T) / 2
(F) T1 = To, T2 = T3 = T4 = To− (4To−T) / 3
(G) T1 = T2 = T3 = T4 = To- (4To-T) / 4
(4To≦Tのとき)
以下の(a)〜(d)の4通りで効率を計算し、最適な効率となる組み合わせを選択する。
(a)T1=To+(T−4To),T2=T3=T4=To
(b)T1=T2=To+(T−4To)/2,T3=T4=To
(c)T1=T2=T3=To+(T−4To)/3,T4=To
(d)T1=T2=T3=T4=To+(T−4To)/4
(When 4To ≦ T)
Efficiency is calculated in the following four ways (a) to (d), and a combination that provides optimum efficiency is selected.
(A) T1 = To + (T-4To), T2 = T3 = T4 = To
(B) T1 = T2 = To + (T-4To) / 2, T3 = T4 = To
(C) T1 = T2 = T3 = To + (T-4To) / 3, T4 = To
(D) T1 = T2 = T3 = T4 = To + (T-4To) / 4
次に、n個のモータMを用いた駆動時におけるトルク配分の一般式を示す。
(T<k・Toのとき(k=1))
T1=T,T2=T3=…=Tn=0
Next, a general expression for torque distribution during driving using n motors M will be shown.
(When T <k · To (k = 1))
T1 = T, T2 = T3 = ... = Tn = 0
((k−1)・To≦T<k・Toのとき、以下の(2k−1)通りで効率を計算し、最適な効率となる組み合わせを選択する(k=2〜n))
T1=To+(T−(k−1)・To)/1,T2=T3=…=Tk-1=To,Tk=Tk+1=…=Tn=0
T1=T2=To+(T−(k−1)・To)/2,T3=T4=…=Tk-1=To,Tk=Tk+1=…=Tn=0
…
T1=T2=…=Tk-2=To+(T−(k−1)・To)/(k−2),Tk-1=To,Tk=Tk+1=…=Tn=0
T1=T2=…=Tk-1=To+(T−(k−1)・To)/(k−1),Tk=Tk+1=…=Tn=0
以上でk−1通り。
(When (k−1) · To ≦ T <k · To, the efficiency is calculated according to the following (2k−1), and the combination that provides the optimum efficiency is selected (k = 2 to n))
T1 = To + (T- (k-1) .To) / 1, T2 = T3 = ... = Tk-1 = To, Tk = Tk + 1 = ... = Tn = 0
T1 = T2 = To + (T- (k-1) .To) / 2, T3 = T4 = ... = Tk-1 = To, Tk = Tk + 1 = ... = Tn = 0
...
T1 = T2 = ... = Tk-2 = To + (T- (k-1) .To) / (k-2), Tk-1 = To, Tk = Tk + 1 = ... = Tn = 0
T1 = T2 = ... = Tk-1 = To + (T- (k-1) .To) / (k-1), Tk = Tk + 1 = ... = Tn = 0
That's all for k-1.
T1=T2=…=Tk-1=To,Tk=To−(k・To−T)/1,Tk+1=…=Tn=0
T1=T2=…=Tk-2=To,Tk-1=Tk=To−(k・To−T)/2,Tk+1=…=Tn=0
…
T1=To,T2=…=Tk-1=Tk=To−(k・To−T)/(k−1),Tk+1=…=Tn=0
T1=T2=…=Tk-1=Tk=To−(k・To−T)/k,Tk+1=…=Tn=0
以上でk通り。
上記のk−1通りと合わせて2k−1通りとなる。
T1 = T2 = ... = T k -1 = To, T k = To- (k · To-T) / 1, T k + 1 = ... = T n = 0
T1 = T2 = ... = T k -2 = To, T k-1 = T k = To- (k · To-T) / 2, T k + 1 = ... = T n = 0
...
T1 = To, T2 = ... = T k-1 = T k = To- (k · To-T) / (k-1), T k + 1 = ... = T n = 0
T1 = T2 = ... = T k -1 = T k = To- (k · To-T) / k, T k + 1 = ... = T n = 0
That's all for k.
Together with the above k-1 ways, there are 2k-1 ways.
(n・To≦Tのとき、以下のn通りで効率を計算し、最適な効率となる組み合わせを選択する)
T1=To+(T−n・To)/1,T2=T3=…=Tn-1=Tn=To
T1=T2=To+(T−n・To)/2,T3=T4=…=Tn-1=Tn=To
…
T1=T2=…=Tn-1=To+(T−n・To)/(n−1),Tn=To
T1=T2=…=Tn-1=Tn=To+(T−n・To)/n
以上でn通り。
(When n · To ≦ T, calculate the efficiency in the following n ways and select the combination that gives the optimum efficiency)
T1 = To + (Tn · To) / 1, T2 = T3 =... = T n-1 = T n = To
T1 = T2 = To + (Tn · To) / 2, T3 = T4 =... = T n-1 = T n = To
...
T1 = T2 = ... = Tn-1 = To + (Tn.To) / (n-1), Tn = To
T1 = T2 = ... = Tn-1 = Tn = To + (Tn.To) / n
This is n ways.
上記によれば、4輪駆動に限らず、6輪駆動や8輪駆動などの移動体におけるトルク配分に適用することができる。 According to the above, the present invention can be applied not only to four-wheel drive but also to torque distribution in moving bodies such as six-wheel drive and eight-wheel drive.
(4輪駆動におけるトルク配分の簡易化)
一般的に、図11−1のような逆U型のトルク−効率特性を示すモータ効率マップが多いため、トルク配分の簡略化が可能となる。ある速度におけるトルクに対する効率の関係は、最適効率を得るトルク値Toより離れるほど、効率の劣化が大きい。よって、各駆動輪のトルクが最適効率トルク値Toに近くなるように等配分する。トルク−効率の特性図における効率曲線が最適効率トルク値Toを中心として、非対称の場合があるため、最適効率トルク値Toよりトルクが小さい側の効率変化と、最適効率トルク値Toよりトルクが大きい側の効率変化に違いがある。よって、最適効率トルク値Toより低トルク側と、最適効率トルク値Toより高トルク側の効率変化率の比を用いて、指令された全トルク指令値Tと最適効率トルク値Toとの関係により、簡易的トルク配分をおこなうことができる。
(Simplified torque distribution in four-wheel drive)
In general, since there are many motor efficiency maps showing an inverted U-type torque-efficiency characteristic as shown in FIG. 11A, torque distribution can be simplified. As for the efficiency relationship with respect to the torque at a certain speed, the deterioration of the efficiency increases as the distance from the torque value To at which the optimum efficiency is obtained increases. Therefore, the torque of each drive wheel is equally distributed so as to be close to the optimum efficiency torque value To. Since the efficiency curve in the torque-efficiency characteristic diagram may be asymmetric with the optimum efficiency torque value To as the center, the efficiency change on the side where the torque is smaller than the optimum efficiency torque value To and the torque is greater than the optimum efficiency torque value To There is a difference in efficiency change on the side. Therefore, the ratio of the efficiency change rate between the lower torque side than the optimum efficiency torque value To and the higher torque side than the optimum efficiency torque value To is used to determine the relationship between the commanded total torque command value T and the optimum efficiency torque value To. Simple torque distribution can be performed.
図16−1は、トルク−効率の特性における変化率の違いを説明する図である。図に示す最適効率トルク値Toを中心として高トルク側の変化率に対して、低トルク側の変化率は2倍である。このような場合、駆動輪が4輪である場合における簡易的トルク配分は下記(1)〜(4)のようにおこなう。なお、図16−1において、150[Nm]と75[Nm]は同じ効率、128.6[Nm]と85.7[Nm]は同じ効率、120[Nm]と90[Nm]は同じ効率である。 FIG. 16A is a diagram illustrating a difference in change rate in the torque-efficiency characteristic. The rate of change on the low torque side is twice the rate of change on the high torque side with the optimum efficiency torque value To shown in the figure as the center. In such a case, simple torque distribution in the case where the drive wheels are four wheels is performed as follows (1) to (4). In FIG. 16A, 150 [Nm] and 75 [Nm] have the same efficiency, 128.6 [Nm] and 85.7 [Nm] have the same efficiency, and 120 [Nm] and 90 [Nm] have the same efficiency. It is.
(1)T<To+2To/4のとき(図16−1に示す例ではT<150[Nm]のとき)
T1=T,T2=T3=T4=0
(2)2(To−To/4)≦T<2(To+2To/7)のとき(図16−1に示す例では75[Nm]・2≦T<128.6[Nm]・2のとき)
T1=T2=T/2,T3=T4=0
(3)3(To−To/7)≦T<3(To+2To/10)のとき(図16−1に示す例では85.7[Nm]・3≦T<120[Nm]・3のとき)
T1=T2=T3=T/3,T4=0
(4)4(To−To/10)≦のとき(図16−1に示す例では90[Nm]・4≦Tのとき)
T1=T2=T3=T4=T/4
なお、図16−1のトルク−効率特性は、逆U型のトルク−効率特性のトルク配分を説明した図11−1と同じ特性を用いている。上記の場合分けの式のTに100〜200[Nm]の値を代入してみると、T<150[Nm]のときは、(T1,T2)=(T,0)が最適効率配分であり、150[Nm]≦T<257.2[Nm]のときは、(T1,T2)=(T/2,T/2)が最適効率配分となるため、逆U型のトルク−効率特性のトルク配分を説明した図12−1〜図12−6の結果と一致することが確認できる。
ゆえに、トルク−効率特性が逆U型であることがわかっていれば、このような簡易的なトルク配分によって最適トルク配分が可能となる。
(1) When T <To + 2To / 4 (when T <150 [Nm] in the example shown in FIG. 16-1)
T1 = T, T2 = T3 = T4 = 0
(2) When 2 (To−To / 4) ≦ T <2 (To + 2To / 7) (in the example shown in FIG. 16A, when 75 [Nm] · 2 ≦ T <128.6 [Nm] · 2 )
T1 = T2 = T / 2, T3 = T4 = 0
(3) When 3 (To−To / 7) ≦ T <3 (To + 2To / 10) (in the example shown in FIG. 16A, when 85.7 [Nm] · 3 ≦ T <120 [Nm] · 3 )
T1 = T2 = T3 = T / 3, T4 = 0
(4) When 4 (To−To / 10) ≦ (in the example shown in FIG. 16A, when 90 [Nm] · 4 ≦ T)
T1 = T2 = T3 = T4 = T / 4
Note that the torque-efficiency characteristics in FIG. 16A are the same as those in FIG. 11A, which illustrates the torque distribution of the inverted U-type torque-efficiency characteristics. Substituting a value of 100 to 200 [Nm] for T in the above case division formula, when T <150 [Nm], (T1, T2) = (T, 0) is the optimum efficiency allocation. Yes, when 150 [Nm] ≦ T <257.2 [Nm], (T1, T2) = (T / 2, T / 2) is the optimal efficiency distribution, so that the reverse U-type torque-efficiency characteristics It can be confirmed that the results agree with the results of FIGS.
Therefore, if it is known that the torque-efficiency characteristic is an inverted U type, optimal torque distribution can be performed by such simple torque distribution.
(n輪駆動の場合の一般系でみたトルク配分の簡易化)
図16−2は、トルク−効率の特性における最適効率トルク値からの離れ量を説明する図である。ここで、k:駆動輪数、X:低トルク側の最適効率トルク値Toからの離れ量、Y:高トルク側の最適効率トルク値Toからの離れ量、a:(高トルク側の変化率)/(低トルク側の変化率)とすると、トルク配分の場合分けは、下記の(1)〜(3)となる。
(1)T<k・(To+(a・To)/(a・k+k+1))のとき、(k=1)
T1=T,T2=…=Tn=0
(2)k・(To−(To)/(a・(k−1)+(k−1)+1))≦T<k・(To+(a・To)/(a・k+k+1))のとき、(k=2〜n−1)
T1=T2=…=Tk=T/k,Tk+1=…=Tn=0
(3)n・(To−(To)/(a・(n−1)+(n−1)+1))≦Tのとき、(k=n)
T1=T2=…=Tn-1=Tn=T/n
となる。
(Simplified torque distribution as seen in general systems in the case of n-wheel drive)
FIG. 16B is a diagram for explaining the distance from the optimum efficiency torque value in the torque-efficiency characteristic. Here, k: the number of drive wheels, X: the distance from the optimum efficiency torque value To on the low torque side, Y: the distance from the optimum efficiency torque value To on the high torque side, a: (change rate on the high torque side) ) / (Change rate on the low torque side), torque distribution is divided into the following (1) to (3).
(1) When T <k · (To + (a · To) / (a · k + k + 1)), (k = 1)
T1 = T, T2 = ... = Tn = 0
(2) When k · (To− (To) / (a · (k−1) + (k−1) +1)) ≦ T <k · (To + (a · To) / (a · k + k + 1)) , (K = 2 to n−1)
T1 = T2 = ... = Tk = T / k, Tk + 1 = ... = Tn = 0
(3) When n · (To− (To) / (a · (n−1) + (n−1) +1)) ≦ T, (k = n)
T1 = T2 = ... = Tn-1 = Tn = T / n
It becomes.
なお、k輪で駆動した場合と、k+1輪で駆動した場合で同じ効率となるトルク値が上記(1)〜(3)の場合分けの境界値となる。これを式で表すと、
(k+1)・(To−X)=k・(To+Y) …(15)
Y=a・X …(16)
となる。上記式(15)、(16)を解いてX,Yを求めると以下となる。
X=To/(a・k+k+1) …(17)
Y=(a・To)/(a・k+k+1) …(18)
これらの式(17)、(18)を用いてn輪駆動時における場合分けが可能となる。
Note that the torque value that gives the same efficiency when driving with k wheels and when driving with k + 1 wheels is the boundary value for the cases (1) to (3). This can be expressed as an expression:
(K + 1) · (To−X) = k · (To + Y) (15)
Y = a · X (16)
It becomes. When X and Y are obtained by solving the above equations (15) and (16), the following is obtained.
X = To / (a · k + k + 1) (17)
Y = (a · To) / (a · k + k + 1) (18)
Using these equations (17) and (18), it is possible to divide cases when driving n-wheels.
(動的トルク配分について)
次に、移動体(駆動輪)の速度によって最適効率トルク値Toが異なるため、速度の変化に応じて動的なトルク配分をおこなう例について説明する。図17は、走行パターンに応じた動的トルク配分を説明する図である。横軸が回転速度、縦軸がトルクのモータ効率マップ上に移動体の走行パターンを記載してある。
(About dynamic torque distribution)
Next, since the optimum efficiency torque value To varies depending on the speed of the moving body (drive wheel), an example in which dynamic torque distribution is performed according to a change in speed will be described. FIG. 17 is a diagram for explaining dynamic torque distribution according to a running pattern. The traveling pattern of the moving body is described on the motor efficiency map in which the horizontal axis is the rotation speed and the vertical axis is the torque.
図17の走行パターンのときには、加速してA点に至るまでの間は、T1=T,T2=T3=T4=0のトルク配分とする。また、A点〜B点の間では、T1=T2=T/2,T3=T4=0とする。B点〜C点の間では、T1=T2=T3=T/3,T4=0とする。C点〜D点の間では、T1=T2=T/2,T3=T4=0とする。D点以降では、T1=T,T2=T3=T4=0とする。このように、時々刻々と変化する速度や負荷トルクに対して、常に最適トルク配分をおこなうため、広帯域な制御による動的なトルク配分をおこなうことができる。 In the travel pattern of FIG. 17, the torque distribution is T1 = T and T2 = T3 = T4 = 0 until acceleration reaches point A. Further, T1 = T2 = T / 2 and T3 = T4 = 0 between the points A and B. Between point B and point C, T1 = T2 = T3 = T / 3 and T4 = 0. Between point C and point D, T1 = T2 = T / 2 and T3 = T4 = 0. After point D, T1 = T and T2 = T3 = T4 = 0. In this way, since the optimum torque distribution is always performed for the speed and load torque that change from moment to moment, dynamic torque distribution by broadband control can be performed.
図18は、回転速度−全トルク指令値に基づく最適駆動輪数の設定データを示す図表である。移動体(駆動輪)の速度と全トルク指令値Tに応じて、総合的な効率が最もよくなる駆動輪数を求めるための表、あるいは算出式を作成しておくことにより、走行中にリアルタイムに最適トルク配分をおこなうことができる。 FIG. 18 is a table showing setting data for the optimum number of drive wheels based on the rotational speed-total torque command value. Depending on the speed of the moving body (drive wheels) and the total torque command value T, a table or calculation formula for obtaining the number of drive wheels that provides the best overall efficiency can be created in real time during travel. Optimal torque distribution can be performed.
たとえば、図18に示す走行パターンの場合の動的トルク配分について説明する。A点に至るまでの間は、T1=T,T2=T3=T4=0のトルク配分であり、1輪駆動となる。また、A点〜B点の間では、T1=T2=T/2,T3=T4=0であり、2輪駆動となる。B点〜C点の間では、T1=T2=T3=T/3,T4=0であり、3輪駆動となる。C点〜D点の間では、T1=T2=T3=T4=T/4であり、4輪駆動となる。D点〜E点の間では、T1=T2=T3=T/3,T4=0であり、3輪駆動となる。E点以降では、T1=T2=T/2,T3=T4=0であり、2輪駆動となる。 For example, dynamic torque distribution in the case of the travel pattern shown in FIG. 18 will be described. Until the point A is reached, torque distribution is T1 = T, T2 = T3 = T4 = 0, and one-wheel drive is performed. In addition, between the points A and B, T1 = T2 = T / 2 and T3 = T4 = 0, and two-wheel drive is performed. Between point B and point C, T1 = T2 = T3 = T / 3, T4 = 0, and three-wheel drive is performed. Between point C and point D, T1 = T2 = T3 = T4 = T / 4, and four-wheel drive is performed. Between point D and point E, T1 = T2 = T3 = T / 3, T4 = 0, and three-wheel drive is performed. After point E, T1 = T2 = T / 2, T3 = T4 = 0, and two-wheel drive is performed.
上記説明したトルク配分のアルゴリズムの結果、すなわち、モータ効率マップをメモリに保持せず、入力が速度およびトルクのときにおける出力である駆動輪数および各駆動輪のトルク値を、図18に示す表、あるいは算出式としてメモリに保持しておけばよい。 FIG. 18 shows the results of the above-described torque distribution algorithm, that is, the number of drive wheels and the torque value of each drive wheel, which are outputs when the motor efficiency map is not held in the memory and the input is speed and torque. Alternatively, it may be stored in the memory as a calculation formula.
以上説明した実施例1によれば、モータ効率マップ上でスリップ率を考慮した傾きのある動作線を引くことにより、回転速度とトルクの動作点を正確に検出することができる。これにより、トルク配分による効率計算を精度よくおこなうことができるようになる。また、各駆動輪に対して最適なトルク配分をおこなえるようになる。なお、左側駆動輪の合計トルクと右側駆動輪の合計トルクが異なるトルク値で走行している際、ハンドル302の角度とヨーレートセンサ310による車体の角度を検出し、その差異が大きいと判断した場合は、左右のトルク差を少なくするようにトルク配分量を調節して走行安定性を確保すればよい。
According to the first embodiment described above, it is possible to accurately detect the operating point of the rotational speed and the torque by drawing an operating line having an inclination in consideration of the slip ratio on the motor efficiency map. Thereby, the efficiency calculation by torque distribution can be performed accurately. In addition, optimal torque distribution can be performed for each drive wheel. When the total torque of the left driving wheel and the total torque of the right driving wheel are traveling at different torque values, the angle of the
(実施例2)
(総合効率の向上のための構成)
実施例2では、総合効率の向上のための構成について説明する。図19は、総合効率を説明するための図である。移動体は、バッテリ312から供給された電源によりモータMを駆動して走行する。このモータMは、コイルの抵抗分による銅損や、渦電流や磁気ヒステリシスによる鉄損等によるロスが発生する。電源からモータM出力までの効率は、駆動系の効率である。このモータMの駆動力により走行する移動体1900は、実際には、モータMの出力を受けてタイヤの回転駆動により走行する走行系1901を有する。この走行系1901においても、タイヤと路面間のスリップによるロスが発生する。モータMの出力から走行パワーとして出力されるまでの効率が走行系の効率である。移動体の総合効率は、これら駆動系の効率×走行系の効率で示される。
(Example 2)
(Configuration for improving overall efficiency)
In the second embodiment, a configuration for improving the overall efficiency will be described. FIG. 19 is a diagram for explaining the overall efficiency. The moving body travels by driving the motor M with the power supplied from the
駆動効率ηd=モータM出力/バッテリ312から供給する電力=(T×ω)/(V×I)で表される。
Drive efficiency ηd = motor M output / power supplied from
上述した実施例1で説明したトルク配分は、駆動効率に関与するものである。実施例2では、走行系の効率を向上させることにより、全体の総合効率を最大にする構成について説明する。 The torque distribution described in the first embodiment is related to the driving efficiency. In the second embodiment, a configuration that maximizes the overall overall efficiency by improving the efficiency of the traveling system will be described.
駆動輪あたりの駆動力Fdは次式で示される。
Fd=μ・N …(19)
(μ:摩擦係数、N:垂直抗力)
よって、Td=Fd・r=μ・N・r …(20)
(r:タイヤ半径)
The driving force Fd per driving wheel is expressed by the following equation.
Fd = μ · N (19)
(Μ: friction coefficient, N: vertical drag)
Therefore, Td = Fd · r = μ · N · r (20)
(R: tire radius)
走行系の効率ηλは、
ηλ=走行パワー/モータ出力=(Fd・v)/(Td・ω)=(Fd・v)/(Fd・r・ω)=v/(r・ω)=v/vw …(21)
(v:車体速度[m/s]、vw:車輪速度[m/s])
また、スリップ率λは、上記式(11)で示される。したがって、走行系の効率ηλは、スリップ率λを用いて表すことができる。
∴ηλ=1−λ …(22)
The efficiency ηλ of the traveling system is
ηλ = running power / motor output = (Fd · v) / (Td · ω) = (Fd · v) / (Fd · r · ω) = v / (r · ω) = v / v w (21)
(V: body speed [m / s], v w : wheel speed [m / s])
The slip ratio λ is expressed by the above formula (11). Therefore, the efficiency ηλ of the traveling system can be expressed using the slip ratio λ.
∴ηλ = 1−λ (22)
上述した図6のスリップ率と摩擦係数の特性より、スリップ率λを摩擦係数μの関数とみなし、λ=f(μ)と表すと、走行系の効率ηλは、以下のように表せる。
ηλ=1−λ=1−f(μ)=1−f(Td/(N・r)) …(23)
∵μ=Td/(N・r) …(24)
When the slip ratio λ is regarded as a function of the friction coefficient μ based on the characteristics of the slip ratio and the friction coefficient in FIG. 6 described above, the efficiency ηλ of the traveling system can be expressed as follows.
ηλ = 1−λ = 1−f (μ) = 1−f (Td / (N · r)) (23)
∵μ = Td / (N · r) (24)
式(20)より、Nが一定のときは、Tdが大きくなるとμが大きくなる。図6の関係より、λが0.2以下の領域では、μが大きくなるとλが大きくなる。ゆえに、1−λが小さくなる。 From equation (20), when N is constant, μ increases as Td increases. From the relationship of FIG. 6, in the region where λ is 0.2 or less, λ increases as μ increases. Therefore, 1-λ becomes small.
図20は、垂直抗力を一定としたときのトルク−走行効率の関係を示す図である。この場合、図示のように、トルクTdが大きくなると、走行効率ηλは低下し、その低下度合いは、トルクTdが大きくなるほど大きく現れる。すなわち、駆動輪のトルクTdを大きくすると、走行効率ηλが低下し、駆動輪のトルクTdを小さくすると、走行効率ηλが増加する。このように、実施例1で説明したトルク配分をおこなう際に、総合効率を向上させるためには、駆動効率だけでなく走行効率も考慮する必要がある。走行効率ηλは、上述したように、あらかじめ作成したスリップ率λ−摩擦係数μの特性マップをメモリ等に保持して用いる構成とするに限らない。他の構成としては、たとえば、移動体を走行させながら、その際の車体速度をセンサ(あるいは推定算出)で検出し、また、駆動輪の速度をセンサで検出してスリップ率λを近似計算し、走行効率ηλのパラメータとして用いることも考えられる。 FIG. 20 is a diagram showing the relationship between torque and running efficiency when the normal force is constant. In this case, as shown in the figure, when the torque Td increases, the traveling efficiency ηλ decreases, and the degree of decrease increases as the torque Td increases. That is, when the driving wheel torque Td is increased, the traveling efficiency ηλ decreases, and when the driving wheel torque Td is decreased, the traveling efficiency ηλ increases. Thus, when performing the torque distribution described in the first embodiment, it is necessary to consider not only the driving efficiency but also the traveling efficiency in order to improve the overall efficiency. As described above, the traveling efficiency ηλ is not limited to a configuration in which a previously created characteristic map of slip ratio λ−friction coefficient μ is held in a memory or the like. As another configuration, for example, the vehicle speed at that time is detected by a sensor (or estimated calculation) while the moving body is running, and the slip ratio λ is approximately calculated by detecting the speed of the driving wheel by the sensor. It is also conceivable to use it as a parameter of the running efficiency ηλ.
(荷重変化による走行効率の変化について)
トルクを示す上記式(20)を変形すると、下記式となる。
μ=Td/(N・r) …(25)
(Changes in running efficiency due to load changes)
When the above equation (20) indicating the torque is modified, the following equation is obtained.
μ = Td / (N · r) (25)
図21は、駆動輪別の垂直抗力が異なる状態を説明する図である。上記式(25)により、ある駆動輪に一定のトルク指令値が与えられている場合、そのタイヤへの路面からの垂直抗力Nの変化に応じて摩擦係数μが変化する。図21に示すように、移動体が登坂、傾斜、加速、カーブを走行する場合等には、移動体の荷重バランスが変わり、ある駆動輪の垂直抗力Nが減少すると、摩擦係数μが大きくなり、スリップ率λも大きくなる。結果として、上記式(22)に示す1−λが小さくなり、走行系の効率ηλが低下することになる。 FIG. 21 is a diagram illustrating a state in which the vertical drag for each drive wheel is different. According to the above equation (25), when a certain torque command value is given to a certain drive wheel, the friction coefficient μ changes according to the change in the normal force N from the road surface to the tire. As shown in FIG. 21, when the moving body travels uphill, incline, accelerates, curves, etc., the load balance of the moving body changes, and when the vertical drag N of a certain drive wheel decreases, the friction coefficient μ increases. Also, the slip ratio λ increases. As a result, 1-λ shown in the above equation (22) becomes small, and the efficiency ηλ of the traveling system decreases.
図22は、垂直抗力別のトルク−走行効率を示す図表である。上記式(23)により、垂直抗力Nが大きいほど走行系の効率ηλは大きく、トルクTdの増加に伴う走行系の効率ηλの低下度合いも緩くなる。よって、各駆動輪の垂直抗力Nが変化した場合、垂直抗力Nの大きい駆動輪は、走行系の効率ηλが増加し、垂直抗力Nの小さい駆動輪は走行系の効率ηλが低下する。これにより、荷重の大きい駆動輪のトルクを増やし、荷重の小さい駆動輪のトルクを少なくすることにより、走行効率を向上させることができるようになる。 FIG. 22 is a chart showing torque-running efficiency for each vertical drag. According to the above equation (23), the greater the vertical drag N, the greater the efficiency ηλ of the traveling system, and the degree of decrease in the efficiency ηλ of the traveling system associated with the increase in the torque Td is also reduced. Therefore, when the vertical drag N of each drive wheel changes, the drive wheel having a large vertical drag N increases the efficiency ηλ of the traveling system, and the drive wheel having a small vertical drag N decreases the efficiency ηλ of the traveling system. Thereby, the driving efficiency can be improved by increasing the torque of the driving wheel having a large load and decreasing the torque of the driving wheel having a small load.
(総合効率について)
図23は、移動体全体の総合効率を説明するための図である。移動体300の各駆動輪FL,FR,RL,RRに全トルク指令値TをT1,T2,T3,T4で分配する。そして、移動体300の総合効率は、各駆動輪FL,FR,RL,RRのトルク分配比×駆動効率ηd×走行効率ηλの総和により得ることができる。
(About overall efficiency)
FIG. 23 is a diagram for explaining the overall efficiency of the entire moving object. All torque command values T are distributed to the drive wheels FL, FR, RL, RR of the moving
図23の駆動輪FLを例に説明すると、モータ効率マップ2301を用いて、駆動輪FLに配分されたトルクT1と、回転速度ω1に基づき、駆動効率ηd1を得る。また、トルク−走行効率特性2302に基づいて、駆動輪FLに配分されたトルクT1から走行効率ηλ1を得る。同様に、他の駆動輪FR,RL,RRについても、それぞれ駆動効率ηd2,ηd3,ηd4と、走行効率ηλ2,ηλ3,ηλ4を得る。
The drive wheel FL in FIG. 23 will be described as an example. Using the
総合効率ηtotalは、下記式により得られる。
ηtotal=(T1/T)・ηd1・ηλ1+(T2/T)・ηd2・ηλ2+(T3/T)・ηd3・ηλ3+(T4/T)・ηd4・ηλ4 …(26)
The overall efficiency ηtotal is obtained by the following formula.
ηtotal = (T1 / T) ·
そして、各駆動輪FL,FR,RL,RRの垂直抗力を検出、あるいは推定し、この垂直抗力に応じて上記式(26)の値が最大になるようにトルク配分をおこなうことにより、走行効率を向上させることができる。 The vertical drag of each drive wheel FL, FR, RL, RR is detected or estimated, and the torque distribution is performed so that the value of the above equation (26) becomes maximum according to the vertical drag, thereby improving the running efficiency. Can be improved.
図24は、実施例2にかかるトルク配分装置の機能的構成を示すブロック図である。図1と同様の構成部には同一の符号を付してある。そして、配分部107には、各駆動輪FL,FR,RL,RRの垂直抗力Nfl、Nfr,Nrl,Nrrがセンサ308a〜308d(図3参照)から入力され、配分部107は、各駆動輪の垂直抗力に基づき、垂直抗力N(荷重)が大きい駆動輪に対するトルク配分比を大きくし、垂直抗力N(荷重)が小さい駆動輪に対するトルク配分比を小さくする。
FIG. 24 is a block diagram of a functional configuration of the torque distribution device according to the second embodiment. Constituent parts similar to those in FIG. Then, the vertical drag Nfl, Nfr, Nrl, Nrr of each drive wheel FL, FR, RL, RR is input from the
(総合効率の計算例)
図25−1、図25−2は、それぞれ総合効率の計算例を示す図である。いずれも移動体300の車体重量は、1600[kg]、全トルク指令値Tが800[Nm]であり、登坂あるいは加速によって荷重バランスが後方に移動し、前輪荷重が各300[kg]、後輪荷重が各500[kg]であるとする。
(Example of total efficiency calculation)
FIGS. 25A and 25B are diagrams illustrating calculation examples of the total efficiency. In both cases, the vehicle body weight of the moving
図25−1に示す例では、各駆動輪のトルク配分を200[Nm]で4輪駆動した場合である。モータ効率マップ2501を用いて、前輪FL,FRに配分されたトルクTd=200[Nm]と、回転速度ω=80[rad/s]に基づき、駆動効率ηd=0.82を得る。また、トルク−走行効率特性2502に基づいて、駆動輪FLに配分されたトルクTd=200[Nm]から走行効率ηλ=0.976を得る。同様に、後輪RL,RRについては、駆動効率ηd=0.82と、走行効率ηλ=0.986を得る。この結果、総合効率ηtotalは、上記式(26)に基づき、
ηtotal=((200/800)・0.82・0.976)・2+((200/800)・0.82・0.986)・2=0.80442
となる。
In the example shown in FIG. 25A, four wheels are driven with a torque distribution of 200 [Nm] for each driving wheel. Using the
ηtotal = ((200/800) · 0.82 · 0.976) · 2 + ((200/800) · 0.82 · 0.986) · 2 = 0.080442
It becomes.
図25−2に示す例では、後輪のトルク配分を400[Nm]で2輪駆動した場合である。モータ効率マップ2501を用いて、前輪FL,FRに配分されたトルクTd=0[Nm]と、回転速度ω=80[rad/s]に基づき、駆動効率ηd=0.69を得る。また、トルク−走行効率特性2502に基づいて、駆動輪FLに配分されたトルクTd=400[Nm]から走行効率ηλ=1を得る。同様に、後輪RL,RRについては、駆動効率ηd=0.93と、走行効率ηλ=0.971を得る。この結果、総合効率ηtotalは、上記式(26)に基づき、
ηtotal=((0/800)・0.69・1)・2+((400/800)・0.93・0.971)・2=0.90303
となる。
In the example shown in FIG. 25-2, the rear wheel torque distribution is two wheels driven at 400 [Nm]. Using the
ηtotal = ((0/800) · 0.691 · 1) · 2 + ((400/800) · 0.93 · 0.971) · 2 = 0.930303
It becomes.
上記計算例に限らず、駆動輪に対する垂直抗力が各々異なる場合であっても、各駆動輪毎に駆動効率と走行効率を算出することができるため、これら駆動効率と走行効率に基づいて総合効率を算出することができる。なお、実施例1のトルク配分アルゴリズムが最適な駆動系効率を有する組み合わせを選択するのに対して、実施例2のトルク配分アルゴリズムは、最適な総合効率を有する組み合わせを選択している。 Not limited to the above calculation example, even if the vertical drag against the driving wheels is different, the driving efficiency and the traveling efficiency can be calculated for each driving wheel. Therefore, the overall efficiency based on the driving efficiency and the traveling efficiency is calculated. Can be calculated. Note that the torque distribution algorithm according to the first embodiment selects a combination having the optimum drive system efficiency, whereas the torque distribution algorithm according to the second embodiment selects the combination having the optimum overall efficiency.
以上説明した実施例2によれば、上述した実施例1同様に、モータ効率マップ上でスリップ率を考慮した傾きのある動作線を引くことにより、回転速度とトルクの動作点を正確に検出することができる。これにより、トルク配分による効率計算を精度よくおこなうことができるようになる。また、各駆動輪に対して最適なトルク配分をおこなえるようになる。加えて、実施例2では、各駆動輪に対する垂直抗力(荷重)を考慮しているから、走行系の効率を正確に検出でき、総合効率を向上できるようになる。また、各駆動輪に対して総合効率を向上させる最適なトルク配分をおこなえるようになる。なお、上述した実施例1同様に、左側駆動輪の合計トルクと右側駆動輪の合計トルクが異なるトルク値で走行している際、ハンドル302の角度とヨーレートセンサ310による車体の角度を検出し、その差異が大きいと判断した場合は、左右のトルク差を少なくするようにトルク配分量を調節して走行安定性を確保すればよい。
According to the second embodiment described above, similarly to the first embodiment described above, the operating point of the rotational speed and the torque is accurately detected by drawing an operation line having an inclination in consideration of the slip ratio on the motor efficiency map. be able to. Thereby, the efficiency calculation by torque distribution can be performed accurately. In addition, optimal torque distribution can be performed for each drive wheel. In addition, in the second embodiment, since the vertical drag (load) on each drive wheel is taken into account, the efficiency of the traveling system can be accurately detected and the overall efficiency can be improved. In addition, optimal torque distribution that improves the overall efficiency for each drive wheel can be performed. As in the first embodiment, when the total torque of the left driving wheel and the total torque of the right driving wheel are traveling at different torque values, the angle of the
なお、本実施の形態で説明したトルクの配分にかかる方法は、あらかじめ用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。 Note that the torque distribution method described in the present embodiment can be realized by executing a program prepared in advance on a computer such as a personal computer or a workstation. This program is recorded on a computer-readable recording medium such as a hard disk, a flexible disk, a CD-ROM, an MO, and a DVD, and is executed by being read from the recording medium by the computer. The program may be a transmission medium that can be distributed via a network such as the Internet.
100,400 トルク配分装置
101 全トルク指令値取得部
102a 車体速度検出部
102b 駆動輪速度検出部
103 スリップ率算出部
104 モータ効率マップ
105 効率マップ取得部
106 算出部
107 配分部
108 制御部
300 移動体
301 コントローラ
307a〜307d (回転速度)センサ
308a〜308d (垂直抗力)センサ
309 加速度センサ
310 ヨーレートセンサ
312 バッテリ
FL,FR,RL,RR 駆動輪
M(M1〜M4) モータ
INV インバータ
DESCRIPTION OF SYMBOLS 100,400
Claims (3)
前記入力された全トルク指令値を取得する全トルク指令値取得手段と、
前記モータに対応するモータ効率マップを取得する効率マップ取得手段と、
前記モータを搭載する車両の車体速度を検出する車体速度検出手段と、
前記駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出手段と、
前記車体速度及び前記駆動輪回転速度に基づいて、前記駆動輪におけるスリップ率を検出するスリップ率検出手段と、
前記スリップ率に基づいて、前記駆動輪回転速度とトルクの関係を示す動作線式を作成し、前記動作線式に基づいて、前記駆動輪回転速度毎に前記トルクと前記モータ効率マップの効率値を示す効率変化式を作成し、前記効率変化式の最適効率トルク値を算出する算出手段と、
前記スリップ率、前記全トルク指令値、および、前記最適効率トルク値に基づいて、
総合効率ηtotal =Σ((Tn/T)×ηdn×ηλn)(ただし、T:全トルク指令値、Tn:各モータのトルク配分値、ηdn:各モータの駆動系効率、ηλn:各駆動輪の走行系効率)が最大となるように、各々の前記モータに対するトルク配分値を算出する配分手段と、
算出した前記トルク配分値に基づいて、各々の前記モータへトルク配分制御する制御手段と、
を備え、
前記配分手段は、
複数個のモータのうち、いずれか一部のモータのトルク配分値のみに前記最適効率トルク値を配分、あるいは全部または一部のモータに対して、それぞれのトルク配分値が最も前記最適効率トルク値に近づくように前記全トルク指令値を均等配分すること
を特徴とするトルク配分装置。 A torque distribution device that distributes all input torque command values to each of a plurality of motors connected to drive wheels,
A total torque command value acquiring means for acquiring the input total torque command value;
Efficiency map acquisition means for acquiring a motor efficiency map corresponding to the motor;
Vehicle body speed detecting means for detecting a vehicle body speed of a vehicle equipped with the motor;
Drive wheel rotation speed detection means for detecting the drive wheel rotation speed of the drive wheel;
A slip ratio detecting means for detecting a slip ratio in the drive wheel based on the vehicle body speed and the drive wheel rotation speed;
Based on the slip ratio, an operation line expression indicating the relationship between the driving wheel rotation speed and the torque is created, and the torque and the efficiency value of the motor efficiency map are calculated for each driving wheel rotation speed based on the operation line expression. And calculating means for calculating an optimum efficiency torque value of the efficiency change formula,
Based on the slip ratio, the total torque command value, and the optimum efficiency torque value,
Total efficiency ηtotal = Σ ((Tn / T) × ηdn × ηλn) (where T: total torque command value, Tn: torque distribution value of each motor, ηdn: drive system efficiency of each motor, ηλn: of each drive wheel Distribution means for calculating a torque distribution value for each of the motors so that the traveling system efficiency) is maximized;
Control means for controlling torque distribution to each of the motors based on the calculated torque distribution value;
With
The distribution means includes
The optimal efficiency torque value is allocated only to the torque distribution value of any one of the plurality of motors, or the torque distribution value is the most optimal efficiency torque value for all or some of the motors. A torque distribution device that distributes all the torque command values equally so as to approach
(1)T<k・(To+(a・To)/(a・k+k+1))のとき、(k=1)
T1=T,T2=…=Tn=0
(2)k・(To−(To)/(a・(k−1)+(k−1)+1))≦T<k・(To+(a・To)/(a・k+k+1))のとき、(k=2〜n−1)
T1=T2=…=Tk=T/k,Tk+1=…=Tn=0
(3)n・(To−(To)/(a・(n−1)+(n−1)+1))≦Tのとき、(k=n)
T1=T2=…=Tn−1=Tn=T/n
のトルク配分値を算出することを特徴とする請求項1に記載のトルク配分装置。 When the total torque command value is T, the optimum efficiency torque value is To, the number of driving wheels is k, and (the rate of change on the high torque side) / (the rate of change on the low torque side) is a, the distribution means is:
(1) When T <k · (To + (a · To) / (a · k + k + 1)), (k = 1)
T1 = T, T2 = ... = Tn = 0
(2) When k · (To− (To) / (a · (k−1) + (k−1) +1)) ≦ T <k · (To + (a · To) / (a · k + k + 1)) , (K = 2 to n−1)
T1 = T2 = ... = Tk = T / k, Tk + 1 = ... = Tn = 0
(3) When n · (To− (To) / (a · (n−1) + (n−1) +1)) ≦ T, (k = n)
T1 = T2 = ... = Tn-1 = Tn = T / n
The torque distribution device according to claim 1, wherein the torque distribution value is calculated.
前記入力された全トルク指令値を取得する全トルク指令値取得工程と、
前記モータに対応するモータ効率マップを取得する効率マップ取得工程と、
前記モータを搭載する車両の車体速度を検出する車体速度検出工程と、
前記駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出工程と、
前記車体速度及び前記駆動輪回転速度に基づいて、前記駆動輪におけるスリップ率を検出するスリップ率検出工程と、
前記スリップ率に基づいて、前記駆動輪回転速度とトルクの関係を示す動作線式を作成し、前記動作線式に基づいて、前記駆動輪回転速度毎に前記トルクと前記モータ効率マップの効率値を示す効率変化式を作成し、前記効率変化式の最適効率トルク値を算出する算出工程と、
前記スリップ率、前記全トルク指令値、および、前記最適効率トルク値に基づいて、
総合効率ηtotal =Σ((Tn/T)×ηdn×ηλn)(ただし、T:全トルク指令値、Tn:各モータのトルク配分値、ηdn:各モータの駆動系効率、ηλn:各駆動輪の走行系効率)が最大となるように、各々の前記モータに対するトルク配分値を算出する配分工程と、
算出した前記トルク配分値に基づいて、各々の前記モータへトルク配分制御する制御工程と、
を含み、
前記配分工程は、
複数個のモータのうち、いずれか一部のモータのトルク配分値のみに前記最適効率トルク値を配分、あるいは全部または一部のモータに対して、それぞれのトルク配分値が最も前記最適効率トルク値に近づくように前記全トルク指令値を均等配分すること
を特徴とするトルク配分方法。 A torque distribution method for distributing all input torque command values to each of a plurality of motors connected to drive wheels,
A total torque command value acquisition step of acquiring the input total torque command value;
An efficiency map acquisition step of acquiring a motor efficiency map corresponding to the motor;
A vehicle body speed detecting step for detecting a vehicle body speed of a vehicle equipped with the motor;
A drive wheel rotation speed detection step for detecting a drive wheel rotation speed in the drive wheel;
A slip ratio detection step of detecting a slip ratio in the drive wheel based on the vehicle body speed and the drive wheel rotation speed;
Based on the slip ratio, an operation line expression indicating the relationship between the driving wheel rotation speed and the torque is created, and the torque and the efficiency value of the motor efficiency map are calculated for each driving wheel rotation speed based on the operation line expression. A calculation step of creating an efficiency change equation indicating the optimal efficiency torque value of the efficiency change equation;
Based on the slip ratio, the total torque command value, and the optimum efficiency torque value,
Total efficiency ηtotal = Σ ((Tn / T) × ηdn × ηλn) (where T: total torque command value, Tn: torque distribution value of each motor, ηdn: drive system efficiency of each motor, ηλn: of each drive wheel A distribution step of calculating a torque distribution value for each of the motors so that the traveling system efficiency) is maximized;
A control step of controlling torque distribution to each of the motors based on the calculated torque distribution value;
Including
The distribution step includes
The optimal efficiency torque value is allocated only to the torque distribution value of any one of the plurality of motors, or the torque distribution value is the most optimal efficiency torque value for all or some of the motors. The torque distribution method is characterized by equally distributing all the torque command values so as to approach
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012031103A JP2012171616A (en) | 2012-02-15 | 2012-02-15 | Torque distributor and method of distributing torque |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012031103A JP2012171616A (en) | 2012-02-15 | 2012-02-15 | Torque distributor and method of distributing torque |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012502050A Division JP5096637B1 (en) | 2011-02-18 | 2011-02-18 | Torque distribution device, torque distribution method, torque distribution value generation method, and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012171616A true JP2012171616A (en) | 2012-09-10 |
Family
ID=46974881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012031103A Pending JP2012171616A (en) | 2012-02-15 | 2012-02-15 | Torque distributor and method of distributing torque |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012171616A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9783182B2 (en) | 2015-04-07 | 2017-10-10 | Hyundai Motor Company | Control method for front and rear wheel torque distribution of electric 4 wheel drive hybrid electric vehicle |
| JP2018137887A (en) * | 2017-02-21 | 2018-08-30 | トヨタ自動車株式会社 | Drive force control system |
| JP2019177739A (en) * | 2018-03-30 | 2019-10-17 | マツダ株式会社 | Control device of four-wheel drive car |
| WO2024001011A1 (en) * | 2022-06-30 | 2024-01-04 | 三一重机有限公司 | Driving electric motor control method and apparatus, and storage device and vehicle |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02133005A (en) * | 1988-11-09 | 1990-05-22 | Aisin Aw Co Ltd | Motor-driven vehicle |
| JP2004120821A (en) * | 2002-09-24 | 2004-04-15 | Japan Science & Technology Corp | Driving-gear of electric automobile |
| JP2006345677A (en) * | 2005-06-10 | 2006-12-21 | Denso Corp | Vehicle drive unit by motor |
| JP2007313982A (en) * | 2006-05-24 | 2007-12-06 | Toyota Motor Corp | Driving force controller for four-wheel-drive vehicle |
| JP2008178216A (en) * | 2007-01-18 | 2008-07-31 | Hitachi Ltd | Automobile, and controller of automobile |
| JP2008228407A (en) * | 2007-03-09 | 2008-09-25 | Tokyo Metropolitan Univ | Braking/driving controller of vehicle |
| JP2009159682A (en) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | Driving force controller |
| JP2010115065A (en) * | 2008-11-07 | 2010-05-20 | Aisin Aw Co Ltd | Traveling energy learning arrangement, its method, and program |
-
2012
- 2012-02-15 JP JP2012031103A patent/JP2012171616A/en active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02133005A (en) * | 1988-11-09 | 1990-05-22 | Aisin Aw Co Ltd | Motor-driven vehicle |
| JP2004120821A (en) * | 2002-09-24 | 2004-04-15 | Japan Science & Technology Corp | Driving-gear of electric automobile |
| JP2006345677A (en) * | 2005-06-10 | 2006-12-21 | Denso Corp | Vehicle drive unit by motor |
| JP2007313982A (en) * | 2006-05-24 | 2007-12-06 | Toyota Motor Corp | Driving force controller for four-wheel-drive vehicle |
| JP2008178216A (en) * | 2007-01-18 | 2008-07-31 | Hitachi Ltd | Automobile, and controller of automobile |
| JP2008228407A (en) * | 2007-03-09 | 2008-09-25 | Tokyo Metropolitan Univ | Braking/driving controller of vehicle |
| JP2009159682A (en) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | Driving force controller |
| JP2010115065A (en) * | 2008-11-07 | 2010-05-20 | Aisin Aw Co Ltd | Traveling energy learning arrangement, its method, and program |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9783182B2 (en) | 2015-04-07 | 2017-10-10 | Hyundai Motor Company | Control method for front and rear wheel torque distribution of electric 4 wheel drive hybrid electric vehicle |
| JP2018137887A (en) * | 2017-02-21 | 2018-08-30 | トヨタ自動車株式会社 | Drive force control system |
| JP2019177739A (en) * | 2018-03-30 | 2019-10-17 | マツダ株式会社 | Control device of four-wheel drive car |
| WO2024001011A1 (en) * | 2022-06-30 | 2024-01-04 | 三一重机有限公司 | Driving electric motor control method and apparatus, and storage device and vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5096636B1 (en) | Torque distribution device, torque distribution method, torque distribution value generation method, and program | |
| JP5096637B1 (en) | Torque distribution device, torque distribution method, torque distribution value generation method, and program | |
| JP4965751B1 (en) | Torque distribution device, torque distribution method, torque distribution value generation method, and program | |
| JP2012228163A (en) | Torque distribution device and torque distribution method | |
| US9073449B2 (en) | Efficiency map generating apparatus, efficiency map generating method, and program | |
| EP3078537B1 (en) | Electric vehicle control device and electric vehicle control method | |
| US8428840B2 (en) | Method for controlling torque at one or more wheels of a vehicle | |
| EP3798044B1 (en) | Control device for electric motor vehicle and control method for electric motor vehicle | |
| US9045057B2 (en) | Efficiency map generating apparatus, efficiency map generating method, and program | |
| KR102569899B1 (en) | Vehicle having electric motor and method of driving controlling for the same | |
| JP5251380B2 (en) | Braking / driving control device and vehicle equipped with the same | |
| EP3251906B1 (en) | Vehicle control device and vehicle control method | |
| KR20150062779A (en) | Enhancement of cornering stability of direct-drive electric vehicle | |
| CN114599544B (en) | Control method for electric vehicle and control device for electric vehicle | |
| JP2012171616A (en) | Torque distributor and method of distributing torque | |
| JP5096623B2 (en) | Torque distribution device and torque distribution method | |
| JP2012175904A (en) | Torque distribution device and torque distribution method | |
| JP2012191831A (en) | Device and method for generating efficiency map | |
| KR101410451B1 (en) | Apparatus, method and computer readable recording medium for controlling wheels in an independant traction type electric vehicle | |
| JP2012191832A (en) | Device and method for generating efficiency map | |
| Sumiya et al. | Range extension control system for electric vehicle with active front steering and driving/braking force distribution on curving road | |
| Gasbaoui et al. | A novel multi-drive electric vehicle system control based on multi-input multi-output PID controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130416 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130806 |