JP2010167881A - Steering device of vehicle - Google Patents
Steering device of vehicle Download PDFInfo
- Publication number
- JP2010167881A JP2010167881A JP2009011687A JP2009011687A JP2010167881A JP 2010167881 A JP2010167881 A JP 2010167881A JP 2009011687 A JP2009011687 A JP 2009011687A JP 2009011687 A JP2009011687 A JP 2009011687A JP 2010167881 A JP2010167881 A JP 2010167881A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- phase
- motor
- angle
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
Description
本発明は、電動パワーステアリング装置と舵角比可変装置とを備えた車両のステアリング装置に関する。 The present invention relates to a vehicle steering device including an electric power steering device and a steering angle ratio variable device.
従来から、電動モータを駆動制御して操舵アシストトルクをステアリング機構に付与する電動パワーステアリング装置と、操舵ハンドルの操舵角に対する操舵輪の転舵角の比である舵角比を可変する舵角比可変装置とを備えたステアリング装置が知られている。こうしたステアリング装置は、例えば、特許文献1に提案されている。舵角比可変装置は、操舵ハンドルを上端に固定した入力操舵軸と、ラックバーに噛合するピニオンギヤを下端に固定した出力操舵軸との間に設けられ、入力操舵軸の回転角度に対する出力操舵軸の回転角度を連続的に変更できるようにしたものである。
Conventionally, an electric power steering device that drives and controls an electric motor to apply steering assist torque to a steering mechanism, and a steering angle ratio that varies a steering angle ratio that is a ratio of a steering angle of a steered wheel to a steering angle of a steering wheel A steering apparatus including a variable device is known. Such a steering apparatus is proposed in
電動パワーステアリング装置は、操舵アシストトルクを出力するための電動モータをステアリングコラムあるいはラックバーに備え、操舵ハンドルに入力された操舵トルクに基づいて目標アシストトルクを設定し、設定された目標アシストトルクが得られるように、電動モータの通電量を制御するものである。電動モータとして3相モータを使用した電動パワーステアリング装置も一般化されている。3相モータを使用した場合、電力供給系統の断線、モータ駆動回路のスイッチング素子の故障等により、3相のうちの1相に通電不良が発生したケースであっても、正常な2相を使ってモータを駆動することができる。こうした3相モータの2相通電駆動技術は、例えば、特許文献2に提案されている。
The electric power steering apparatus includes an electric motor for outputting a steering assist torque in a steering column or a rack bar, sets a target assist torque based on the steering torque input to the steering handle, and the set target assist torque is As a result, the energization amount of the electric motor is controlled. An electric power steering apparatus using a three-phase motor as an electric motor has also been generalized. When using a three-phase motor, use a normal two phase even if a power failure occurs in one of the three phases due to disconnection of the power supply system, failure of the switching element of the motor drive circuit, etc. The motor can be driven. Such a two-phase energization driving technique for a three-phase motor has been proposed in
しかしながら、特許文献2に提案された電動パワーステアリング装置では、2相通電駆動時において、通電不良が発生していない2相に正弦波電流を流すため、モータ電気角の変化に伴ってトルクが大きく変動してしまう。これに対して、モータ電気角の変化に対して一定のトルクを発生するための2相通電用電流演算式を用いて通電制御すれば理論的にはトルク変動が生じない。この2相通電用電流演算式は、例えば、次のように表すことができる。
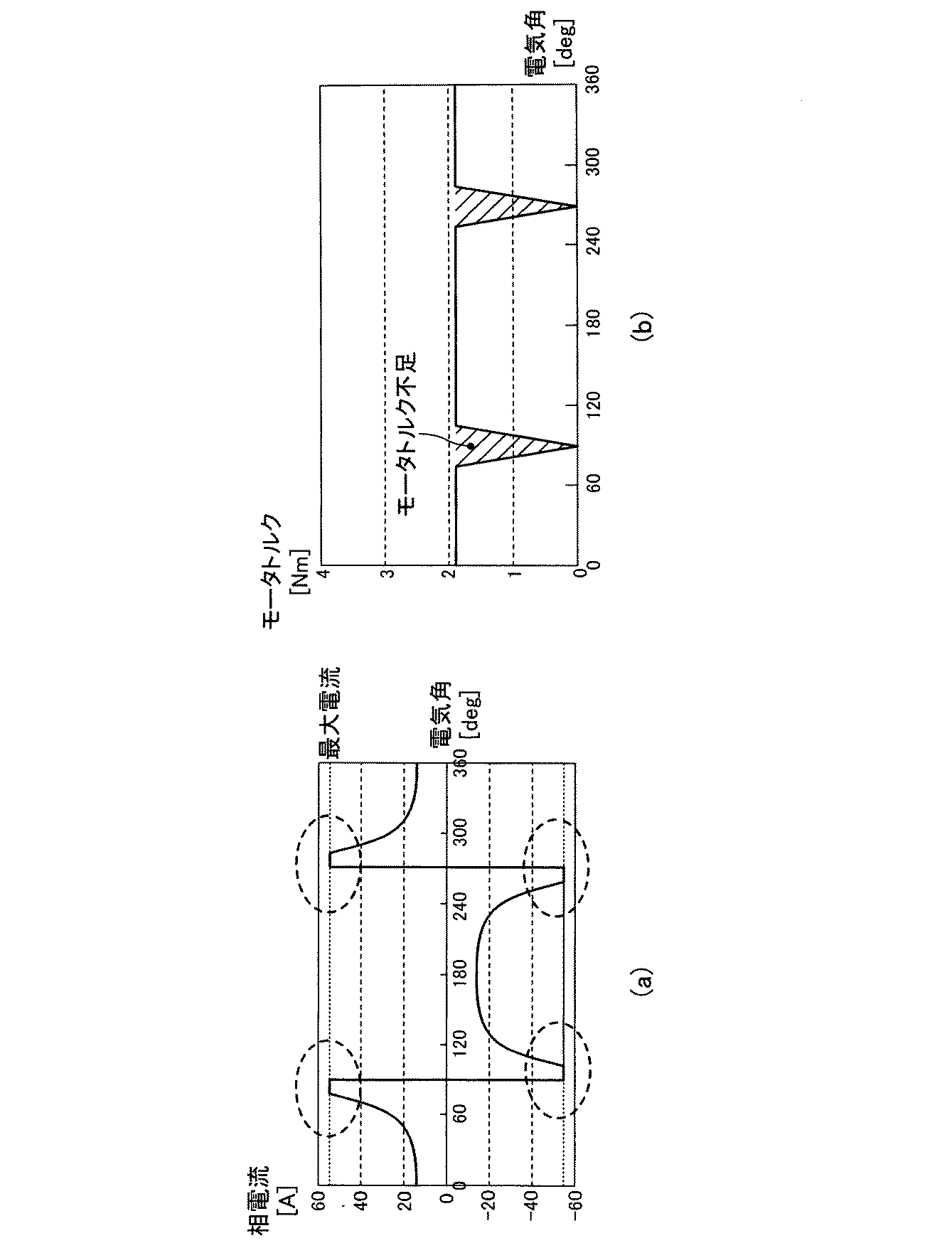
この2相通電用電流演算式によれば、電流値が特定の電気角において無限大になるため、各相の電流を予め設定した最大電流値以下に制限する必要がある。従って、電流波形は、図4(a)に示すようになる。このように最大電流の制限が加わると、図4(b)に示すように、特定の電気角領域においてモータトルク不足が発生する。この結果、モータを良好に回転させることができない。 According to this two-phase energization current calculation formula, since the current value becomes infinite at a specific electrical angle, it is necessary to limit the current of each phase to a predetermined maximum current value or less. Therefore, the current waveform is as shown in FIG. When the maximum current is limited in this way, motor torque shortage occurs in a specific electrical angle region as shown in FIG. 4B. As a result, the motor cannot be rotated well.
本発明の目的は、上記問題に対処するためになされたもので、電動パワーステアリング装置の3相モータの1相が通電不良となり2相通電駆動する場合であっても、モータを良好に回転させることにある。 An object of the present invention is to solve the above-described problem, and even when one phase of a three-phase motor of an electric power steering apparatus is poorly energized and is driven by two-phase energization, the motor is rotated satisfactorily. There is.
上記目的を達成するために、本発明の特徴は、3相のモータを駆動制御して操舵アシストトルクをステアリング機構に付与する電動パワーステアリング装置と、操舵ハンドルの操舵角に対する操舵輪の転舵角の比である舵角比を可変する舵角比可変装置とを備えた車両のステアリング装置において、
前記電動パワーステアリング装置は、前記モータの電気角を検出する電気角検出手段と、前記モータの各相への通電不良の発生を検出する通電不良検手段と、前記モータへの通電不良が1相だけ発生しているときに、通電不良が発生していない2相を使って前記モータの電気角の変化に対して変動しない操舵アシストトルクを出力するための理論上の2相通電用電流演算式と、前記モータの上限電流を規定する最大電流と、前記2相通電用電流演算式における前記モータの電気角を進める進角量とに基づいて、2相通電用の指令電流を演算し、演算した2相通電用の指令電流にて通電不良の発生していない2相に通電して前記モータを駆動制御する2相通電制御手段と、前記2相通電制御手段により前記モータが駆動制御されているときに、操舵軸に入力される操舵トルクを検出し、操舵トルクが予め設定した判定基準操舵トルク以上であるか否かを判定する操舵トルク判定手段と、前記2相通電制御手段により前記モータが駆動制御されているときに、前記モータあるいは操舵軸の回転速度を検出し、回転速度が予め設定した判定基準速度未満であるか否かを判定する回転速度判定手段と、前記操舵トルク判定手段により前記操舵トルクが前記判定基準操舵トルク以上であると判定され、かつ、前記回転速度判定手段により前記回転速度が前記判定基準速度未満であると判定されたとき、前記舵角比可変装置に対して舵角比の変更指令を出力する舵角比変更指令手段とを備えたことにある。
In order to achieve the above object, the present invention is characterized by an electric power steering device that drives and controls a three-phase motor to apply a steering assist torque to a steering mechanism, and a steering angle of a steering wheel with respect to a steering angle of a steering wheel In a steering apparatus for a vehicle provided with a steering angle ratio variable device that varies a steering angle ratio that is a ratio of
The electric power steering device includes: an electrical angle detection unit that detects an electrical angle of the motor; a conduction failure detection unit that detects occurrence of a conduction failure to each phase of the motor; and a conduction failure to the motor in one phase. The theoretical current calculation formula for two-phase energization for outputting a steering assist torque that does not fluctuate with respect to a change in the electric angle of the motor using two phases in which no energization failure has occurred And calculating a command current for two-phase energization based on the maximum current that defines the upper limit current of the motor and the advance amount of the electric angle of the motor in the two-phase energization current calculation formula The two-phase energization control means for energizing the two-phase energization with the two-phase energization command current to control the drive of the motor by energizing the two phases where no energization failure has occurred, and the motor is driven and controlled by the two-phase energization control means. When Steering torque input to the rudder shaft is detected, and the motor is driven and controlled by steering torque determination means for determining whether or not the steering torque is equal to or greater than a predetermined determination reference steering torque, and the two-phase energization control means. The rotational speed of the motor or the steering shaft is detected, rotational speed determination means for determining whether the rotational speed is less than a preset reference speed, and the steering torque by the steering torque determination means Is determined to be greater than or equal to the determination reference steering torque, and the rotation speed determination means determines that the rotation speed is less than the determination reference speed, the steering angle ratio with respect to the steering angle ratio variable device Steering angle ratio change command means for outputting the change command.
本発明のステアリング装置は、電動パワーステアリング装置と舵角比可変装置とを備えている。電動パワーステアリング装置は、3相モータの通電を制御することにより操舵アシストトルクをステアリング機構に付与する。例えば、操舵ハンドルに入力された操舵トルクに基づいて目標アシストトルクを設定し、目標アシストトルクが得られるようにモータの通電量を制御して運転者の操舵操作をアシストする。3相モータとしては、3相ブラシレスモータが好適である。電動パワーステアリング装置は、3相モータへの通電不良が発生した場合でも、正常な2相を使ってモータ駆動できるように、電気角検出手段、通電不良検手段、2相通電制御手段、操舵トルク判定手段、回転速度判定手段、舵角比変更指令手段を備えている。 The steering device of the present invention includes an electric power steering device and a steering angle ratio variable device. The electric power steering device applies steering assist torque to the steering mechanism by controlling energization of the three-phase motor. For example, the target assist torque is set based on the steering torque input to the steering wheel, and the driver's steering operation is assisted by controlling the energization amount of the motor so as to obtain the target assist torque. A three-phase brushless motor is suitable as the three-phase motor. The electric power steering device has an electrical angle detection means, a conduction failure detection means, a two-phase conduction control means, a steering torque so that even when a conduction failure to a three-phase motor occurs, the motor can be driven using normal two phases. Judgment means, rotational speed judgment means, and steering angle ratio change command means are provided.
通電不良検出手段によりモータへの通電不良が1相だけ発生していることが検出された場合、2相通電制御手段が正常な2相を使ってモータを駆動制御する。この場合、2相通電制御手段は、モータの電気角の変化に対して変動しない操舵アシストトルクを出力するための理論上の2相通電用電流演算式と、モータの上限電流を規定する最大電流(最大電流値)と、2相通電用電流演算式におけるモータの電気角を進める進角量とに基づいて、2相通電用の指令電流(指令電流値)を演算し、演算した2相通電用の指令電流にて通電不良の発生していない2相に通電してモータを駆動制御する。 When it is detected by the energization failure detecting means that only one phase of energization to the motor has occurred, the two-phase energization control means drives and controls the motor using two normal phases. In this case, the two-phase energization control means includes a theoretical two-phase energization current calculation formula for outputting a steering assist torque that does not fluctuate with respect to a change in the electrical angle of the motor, and a maximum current that defines the upper limit current of the motor. Based on the (maximum current value) and the advance amount by which the electrical angle of the motor is advanced in the current calculation formula for two-phase energization, a command current (command current value) for two-phase energization is calculated, and the calculated two-phase energization The motor is driven and controlled by energizing the two phases with no energization failure with the command current.
2相通電用電流演算式は、電気角検出手段により検出されるモータの電気角に応じた2相通電用の電流を設定するが、特定の電気角に接近するとき電流の大きさ(絶対値)が急激に増加し、その特定の電気角を通過すると、符号(電流の向き)が反転して電流の大きさ(絶対値)が減少していく。最大電流は、モータおよびモータ駆動回路を保護するために設定されている。従って、特定の電気角近傍領域において、2相通電用の電流は、その大きさ(絶対値)が最大電流に制限される。この電流制限により、モータで発生できるトルクが減少する。また、ステアリング機構には、操舵方向に対してタイヤを戻そうとする反対方向の力となる反力が発生する。従って、通電方向が反転する電気角近傍領域においてモータトルクが不足し、その位置からモータを回転できなくなるおそれがある。このため、運転者の大きな操舵力が必要となる。そこで、本発明においては、2相通電用電流演算式におけるモータの電気角を進めて指令電流を演算する。つまり、2相通電用電流演算式は、モータの電気角からモータに流す電流を求める演算式であるが、2相通電制御手段は、電気角検出手段により検出した実電気角をモータ回転方向に進角量だけ進めた電気角に対する電流を2相通電用電流演算式から演算し、最大電流制限を加えて指令電流を算出する。 The current calculation formula for two-phase energization sets the current for two-phase energization corresponding to the electrical angle of the motor detected by the electrical angle detection means, but the magnitude of the current (absolute value when approaching a specific electrical angle) ) Increases rapidly and passes through the specific electrical angle, the sign (current direction) is reversed and the current magnitude (absolute value) decreases. The maximum current is set to protect the motor and motor drive circuit. Therefore, the magnitude (absolute value) of the current for two-phase energization is limited to the maximum current in the region near the specific electrical angle. This current limitation reduces the torque that can be generated by the motor. In addition, a reaction force is generated in the steering mechanism, which is a force in the opposite direction to return the tire with respect to the steering direction. Therefore, the motor torque is insufficient in the region near the electrical angle where the energization direction is reversed, and the motor may not be able to rotate from that position. For this reason, a large steering force of the driver is required. Therefore, in the present invention, the command current is calculated by advancing the electrical angle of the motor in the current calculation formula for two-phase energization. In other words, the current calculation formula for two-phase energization is an arithmetic expression for obtaining the current flowing to the motor from the electric angle of the motor, but the two-phase energization control means sets the actual electric angle detected by the electric angle detection means in the motor rotation direction. The current for the electrical angle advanced by the advance amount is calculated from the current calculation formula for two-phase energization, and the command current is calculated by adding the maximum current limit.
2相通電用電流演算式における電気角を進めた場合、モータを電気角が増加する方向に駆動させるケースを考えると、電気角に対するモータトルク特性は、指令電流の通電方向が反転する特定電気角(進角量だけ進められている)より小さい電気角の位置でトルクが増加し、特定電気角を越えると、急激にトルクが減少して逆方向のトルクが発生するようになる。そして、電気角が大きくなるにしたがって逆方向のトルクが弱まり、正方向のトルクに転じて徐々に増大していく。従って、特定電気角を挟んで、反力よりも大きな操舵アシストトルクを発生できる過アシスト領域と、操舵方向に対して反対方向にトルクを発生する逆アシスト領域とが形成される。また、逆アシスト領域よりも電気角の大きくなる領域には、電気角の増加にしたがって操舵方向にトルクを増大させて過アシスト領域に至る不足アシスト領域が形成される。 Considering the case of driving the motor in the direction in which the electrical angle increases when the electrical angle in the two-phase energization current calculation formula is advanced, the motor torque characteristic with respect to the electrical angle is a specific electrical angle at which the energization direction of the command current is reversed. The torque increases at a position of a smaller electrical angle (which is advanced by the advance amount), and when it exceeds a specific electrical angle, the torque decreases rapidly and a torque in the reverse direction is generated. As the electrical angle increases, the torque in the reverse direction becomes weaker and gradually increases as it turns to the torque in the forward direction. Accordingly, an over-assist region where a steering assist torque larger than the reaction force can be generated and a reverse assist region where torque is generated in the opposite direction to the steering direction is formed across the specific electrical angle. In addition, in the region where the electrical angle is larger than the reverse assist region, a short assist region is formed in which the torque is increased in the steering direction as the electrical angle increases to reach the over assist region.
こうしたモータ特性においては、モータが不足アシスト領域で止まった場合、操舵方向に対してタイヤを戻そうとする反力によりモータが逆方向に回転する。そして、電気角が逆アシスト領域となる回転位置にまで戻されると、モータ自身の発生する逆方向のトルクにより、その回転位置をさらに過アシスト領域にまで逆回転させる。過アシスト領域にまで戻されると、モータは、反力に打ち勝つ大きな操舵方向のトルクを発生させ操舵方向に回転し、過アシスト領域で蓄えた運動エネルギーにより、逆アシスト領域と不足アシスト領域とを通過することができる。これにより、2相を使ってモータを良好に回転させることができる。尚、2相通電用電流演算式は、通電不良の相に応じた位相にて設定されるため、特定の電気角もそれに応じて異なる。 In such motor characteristics, when the motor stops in the shortage assist region, the motor rotates in the reverse direction due to a reaction force for returning the tire with respect to the steering direction. Then, when the electrical angle is returned to the rotational position that becomes the reverse assist region, the rotational position is further reversely rotated to the over assist region by the reverse torque generated by the motor itself. When the motor is returned to the over assist area, the motor generates a large torque in the steering direction that overcomes the reaction force, rotates in the steering direction, and passes through the reverse assist area and the insufficient assist area by the kinetic energy stored in the over assist area. can do. Thereby, a motor can be rotated favorably using two phases. Note that the current calculation formula for two-phase energization is set at a phase corresponding to the phase of the energization failure, and therefore the specific electrical angle varies accordingly.
このように、2相通電駆動時においては、過アシスト領域と逆アシスト領域とを設けることによりモータトルクが不足する電気角領域が存在してもモータを回転させることができるが、モータトルク特性と反力との関係から、過アシスト領域と逆アシスト領域(過アシスト領域の回転方向側の逆アシスト領域)とのあいだに不足アシスト領域が生じるケースがある。こうしたケースにおいては、この過アシスト領域と逆アシスト領域とのあいだの不足アシスト領域からモータ回転を開始させる場合、あるいは、極低速操舵によりモータがこの不足アシスト領域を通過しようとする場合に、モータは、自身の発生するトルクでは反力に打ち勝って逆アシスト領域にまで回転することができない。また、反力により逆回転方向に回されても過アシスト領域内にまで戻ることもできない。このため、運転者に一時的に大きな操舵力が必要となり違和感を与えてしまう。 As described above, during the two-phase energization driving, the motor can be rotated even if there is an electrical angle region where the motor torque is insufficient by providing the over assist region and the reverse assist region. Due to the relationship with the reaction force, there may be a case where a short assist region occurs between the over assist region and the reverse assist region (the reverse assist region on the rotation direction side of the over assist region). In such a case, when starting motor rotation from a short assist region between the over assist region and the reverse assist region, or when the motor tries to pass this short assist region by extremely low speed steering, The torque generated by itself cannot overcome the reaction force and rotate to the reverse assist region. Moreover, even if it is rotated in the reverse rotation direction by the reaction force, it cannot return to the over assist region. For this reason, a large steering force is temporarily required for the driver, which gives a sense of incongruity.
そこで、本発明においては、操舵トルク判定手段が操舵軸に入力される操舵トルクが予め設定した判定基準操舵トルク以上であるか否かを判定し、回転速度判定手段がモータあるいは操舵軸の回転速度が予め設定した判定基準速度未満であるか否かを判定する。操舵トルク判定手段により操舵トルクが判定基準操舵トルク以上であると判定され、かつ、回転速度判定手段によりモータあるいは操舵軸の回転速度が判定基準速度未満であると判定されたとき、モータが過アシスト領域と逆アシスト領域とのあいだの不足アシスト領域から回転開始する状況にあると判断できる。このとき、舵角比変更指令手段が舵角比可変装置に対して舵角比の変更指令を出力する。舵角比変更装置は、操舵ハンドルの操舵角に対する操舵輪の転舵角の比である舵角比を可変するものである。例えば、車速に応じて目標舵角比を設定する目標舵角比設定手段と、舵角比を変更する電気アクチュエータと、舵角比が目標舵角比となるように電気アクチュエータを駆動制御する舵角比制御手段とを備える。従って、舵角比変更装置は、舵角比変更指令手段から舵角比の変更指令を入力した場合には、操舵輪を転舵する。これに伴って電動パワーステアリング装置のモータの回転位置が変化する。従って、モータの電気角が過アシスト領域と逆アシスト領域とのあいだの不足アシスト領域から抜け出る。 Therefore, in the present invention, the steering torque determining means determines whether or not the steering torque input to the steering shaft is greater than or equal to a predetermined determination reference steering torque, and the rotational speed determining means is the rotational speed of the motor or the steering shaft. Is less than a preset reference speed. When the steering torque determination means determines that the steering torque is greater than or equal to the determination reference steering torque, and the rotation speed determination means determines that the rotation speed of the motor or the steering shaft is less than the determination reference speed, the motor is over-assisted. It can be determined that the rotation starts from the insufficient assist area between the area and the reverse assist area. At this time, the steering angle ratio change command means outputs a steering angle ratio change command to the steering angle ratio variable device. The rudder angle ratio changing device varies the rudder angle ratio, which is the ratio of the steered wheel turning angle to the steering angle of the steering wheel. For example, a target rudder angle ratio setting unit that sets a target rudder angle ratio according to the vehicle speed, an electric actuator that changes the rudder angle ratio, and a rudder that drives and controls the electric actuator so that the rudder angle ratio becomes the target rudder angle ratio. Angle ratio control means. Therefore, the steering angle ratio changing device steers the steered wheels when the steering angle ratio change command is input from the steering angle ratio change command means. Along with this, the rotational position of the motor of the electric power steering apparatus changes. Therefore, the electric angle of the motor exits from the insufficient assist region between the over assist region and the reverse assist region.
この結果、本発明によれば、電動パワーステアリング装置の3相モータの1相が通電不良となり2相通電駆動する場合であってもモータを良好に回転させることができ、しかも、極低速操舵時において運転者に違和感を与えないようにすることができる。 As a result, according to the present invention, even when one phase of the three-phase motor of the electric power steering apparatus is poorly energized and driven in two-phase energization, the motor can be rotated well, and at the time of extremely low speed steering. It is possible to prevent the driver from feeling uncomfortable.
以下、本発明の一実施形態に係る車両のステアリング装置について図面を用いて説明する。図1は、同実施形態に係る車両のステアリング装置の概略構成を表している。 A vehicle steering apparatus according to an embodiment of the present invention will be described below with reference to the drawings. FIG. 1 shows a schematic configuration of a vehicle steering apparatus according to the embodiment.
車両のステアリング装置は、運転者によって回動操作される操舵ハンドル11を操舵軸12に固定して備えている。操舵軸12は、操舵ハンドル11を上端に固定する操舵軸12a(以下、入力操舵軸12aと呼ぶ)と、ピニオンギヤ13を下端に固定する操舵軸12b(以下、出力操舵軸12bと呼ぶ)とに、上下に2分割されている。ピニオンギヤ13は、ラックバー14のラック歯が噛み合っている。ラックバー14は、左右方向(車幅方向)に延設され、その両端が、図示しないタイロッドを介して操舵輪としての左右前輪15a,15bのナックルと操舵可能に連結されている。従って、操舵ハンドル11の回動は、操舵軸12およびピニオンギヤ13を介してラックバー14に伝達されて、ラックバー14を軸線方向に変位させて、左右前輪15a,15bを操舵する。このような操舵軸12、ピニオンギヤ13、ラックバー14等によりステアリング機構が構成されている。
A vehicle steering apparatus includes a
2分割された操舵軸12の入力操舵軸12aと出力操舵軸12bとの間には、操舵ハンドル11の操舵角に対する前輪(操舵輪)15a,15bの転舵角の比である舵角比を変更する舵角比可変機構20が介装されている。舵角比可変機構20は、入力操舵軸12aの下端部に一体回転するように接続された円筒状のケーシング21を備えている。このケーシング21内には、電動モータ22が固定されている。電動モータ22の出力軸22aは、ケーシング21に回転可能に支持されていて、下端にて出力操舵軸12bに一体回転可能に接続されている。電動モータ22は、減速機構を内蔵していて、電動モータ22の回転は減速されて出力軸22aに出力される。
A steering angle ratio, which is a ratio of the steering angles of the front wheels (steering wheels) 15a and 15b to the steering angle of the
電動モータ22には、相対角センサ43が設けられる。相対角センサ43は、電動モータ22の出力軸22aに組み付けられていて、出力操舵軸12bのケーシング21に対する回転角に応じた検出信号を出力する。この相対角センサ43により検出される回転角の値を、以下、相対角Δθvと呼ぶ。従って、出力操舵軸12bの回転角は、操舵角θhと相対角Δθvとの和となる。
The
ラックバー14には、操舵アシストトルクを出力して運転者の操舵ハンドルの回動操作を補助するパワーアシスト機構30が設けられている。パワーアシスト機構30は、電動モータ31とボールねじ機構32とを備えている。電動モータ31の回転は、ボールねじ機構32によってラックバー14の軸線方向の運動に変換されてラックバー14に伝達され、左右前輪15a,15bに転舵力を付与して運転者の操舵操作をアシストする。
The
電動モータ31は、3相ブラシレスモータが使用される。電動モータ31には、回転制御に必要な回転角センサ40が設けられる。この回転角センサ40は、電動モータ31内に組み込まれ、電動モータ31の回転子の回転角度位置に応じた検出信号を出力する。この回転角センサ40により検出される回転角の値を、以下、モータ回転角θmと呼ぶ。モータ回転角θmは、電動モータ31の電気角θeの計算に利用される。
As the
また、ステアリング機構内には、操舵角センサ41、操舵トルクセンサ42が組み付けられている。操舵角センサ41は、入力操舵軸12aに組み付けられていて、操舵ハンドル11の中立位置からの回転角、すなわち、操舵角に応じた検出信号を出力する。この操舵角センサ41により検出される回転角の値を、以下、操舵角θhと呼ぶ。操舵トルクセンサ42は、出力操舵軸12bに組み付けられており、出力操舵軸12bに作用するトルク、すなわち、左右前輪15a,15bの操舵に伴う操舵トルクを表す検出信号を出力する。この操舵トルクセンサ42により検出される操舵トルクの値を操舵トルクTrと呼ぶ。尚、操舵角θh、操舵トルクTrおよび相対角Δθvは、正の値により右方向の角度およびトルクを表し、負の値により左方向の角度およびトルクを表すものとする。
A
舵角比可変機構20の電動モータ22は、舵角比電子制御ユニット50(以下、舵角比ECU50と呼ぶ)によって駆動制御される。舵角比ECU50は、CPU,ROM,RAM等からなるマイクロコンピュータを主要部として備えたマイコン部60と、モータ駆動回路70とから構成される。マイコン部60は、図示しない入力インタフェースを介して操舵角センサ41、相対角センサ43、車速を検出する車速センサ44を接続し、操舵角θhを表す信号、相対角Δθvを表す信号、車速vを表す信号を入力する。また、モータ駆動回路70は、Hブリッジ回路やインバータ回路であって、マイコン部60から出力されるPWM制御信号により内部のスイッチング素子のデューティ比が制御されて、電動モータ22の通電量および回転方向を調整する。
The
舵角比可変装置80は、舵角比可変機構20と舵角比ECU50と上述のセンサ類(操舵角センサ41、相対角センサ43、車速センサ44)とにより構成される。舵角比可変装置80により調整される舵角比は、入力操舵軸12aの回転した角度αに対する前輪15a,15bの転舵した角度βの比(β/α)を意味し、舵角比が大きいほど少ないハンドル操作で大きく前輪を転舵でき、舵角比が小さいほど前輪を転舵するのに大きなハンドル操作を必要とする。前輪15a,15bの転舵角δは、出力操舵軸12bの回転角度θoutから一義的に決まるため、入力操舵軸12aの回転角度(操舵角θh)に対する出力操舵軸12bの回転角度θoutの比(θout/θh)を制御することにより舵角比を制御することができる。また、出力操舵軸12bの回転角度θoutは、操舵角θhと相対角Δθvとの和に等しい。従って、舵角比ECU50による電動モータ22の回転角制御により舵角比を目標値に制御することができる。
The steering angle ratio
マイコン部60は、入力した操舵角θhおよび車速vを用いて、下記式の演算の実行により目標相対角Δθv*を計算する。なお、下記式中の係数K1は予め決められた定数である。係数Kvは、マイコン部60のROM内に設けられた車速−係数マップ(図14参照)を参照することにより、車速vが増加するに従って「1.0」より大きな所定値から「1.0」に徐々に減少する値に決定される。
Δθv*=K1・(Kv−1)・θh
The
Δθv * = K1 ・ (Kv−1) ・ θh
マイコン部60は、算出した目標相対角Δθv*と、相対角センサ43から入力した実際の相対角Δθvとの偏差(Δθv*−Δθv)を演算し、偏差(Δθv*−Δθv)に応じたフィードバック制御信号(PWM制御信号)をモータ駆動回路70に出力する。モータ駆動回路70は、マイコン部60から出力されたPWM制御信号により内部のスイッチング素子のデューティ比を調整して電動モータ22を駆動し、操舵軸12bを目標相対角Δθv*まで回転させる。
The
この状態では、操舵角(すなわち、操舵軸12aの基準回転位置からの回転角)がθhであれば、操舵軸12bの回転角はθh+Δθv*となり、左右前輪15a,15bはこの回転角θh+Δθv*に比例した切れ角だけ操舵される。したがって、車速vが小さいほど操舵ハンドル11の回転に対して左右前輪15a,15bは大きく操舵される。すなわち、舵角比は、車速vが小さくなるに従って大きく、車両の小回り性能が良好になる。また、高速走行時における車両の走行安定性が良好になる。
In this state, if the steering angle (that is, the rotation angle from the reference rotation position of the
パワーアシスト機構30の電動モータ31(3相ブラシレスモータ)は、操舵アシスト電子制御ユニット100(以下、操舵アシストECU100と呼ぶ)によって駆動制御される。操舵アシストECU100は、CPU,ROM,RAM等からなるマイクロコンピュータを主要部として備えたマイコン部110と、3相インバータ回路からなるモータ駆動回路130とから構成される。モータ駆動回路130には、電動モータ31の各相(U相,V相,W相)ごとに流れる電流をそれぞれ検出し、その検出した電流値に対応した検出信号をマイコン部110に出力する電流センサ131を備えている。この測定された3相の電流値をモータ電流Iuvwと総称し、それぞれの相電流値をIu,Iv,Iwにて表す。
The electric motor 31 (three-phase brushless motor) of the
マイコン部110は、図示しない入力インタフェースを介して操舵角センサ41、操舵トルクセンサ42、回転角センサ40、電流センサ131、車速センサ44を接続し、操舵角θhを表す信号、操舵トルクTrを表す信号、モータ回転角θmを表す信号、モータ電流Iuvwを表す信号、車速vを表す信号を入力する。そして、入力した検出信号に基づいて、運転者の操舵操作に応じた最適な操舵アシストトルクが得られるように電動モータ31に流す指令電流(目標電流)を演算し、その指令電流が流れるようにモータ駆動回路130にPWM制御信号を出力する。モータ駆動回路130は、このPWM制御信号により3相インバータ回路を構成する各スイッチング素子のデューティ比が制御されて、電動モータ31の通電量および回転方向を調整する。
The
また、マイコン部110は、電動モータ31へ電力供給する通電路における不良(通電不良)を各相ごとに区別して検出し、1相だけの通電不良を検出したとき、正常な2相を使って電動モータ31を駆動する2相通電制御を行う機能を備えている。
In addition, the
電動パワーステアリング装置200は、パワーアシスト機構30と操舵アシストECU100と上述のセンサ類(操舵角センサ41、操舵トルクセンサ42、回転角センサ40、電流センサ131、車速センサ44)とにより構成される。また、電動パワーステアリング装置200のマイコン部110は、舵角比可変装置80のマイコン部60と通信可能に接続され、互いに制御指令を授受できるようになっている。
The electric
次に、電動パワーステアリング装置200におけるマイコン部110の機能について図2を用いて説明する。図2は、マイコン部110のプログラム制御により処理される機能を表す機能ブロック図である。マイコン部110は、電動モータ31の各相への通電不良が検出されているか否かに応じてモータ制御形態を切り替える。電動モータ31への通電が3相すべて正常であれば3相を使ったモータ制御(以下、3相通電制御と呼ぶ)を行い、1相の通電不良が検出されているときには通電不良が検出されていない2相を使ったモータ制御(以下、2相通電制御と呼ぶ)を行うように切り替える。また、2相以上の通電不良が検出されているときにはモータ駆動不能であるためモータ制御を停止する。
Next, functions of the
図2に示すように、マイコン部110は、アシスト電流指令部111を備えている。アシスト電流指令部111は、操舵トルクセンサ42から出力される操舵トルクTr及び車速センサ44から出力される車速vを入力して、基本アシストマップを参照することにより基本アシストトルクTasを計算する。基本アシストマップは、操舵トルクTrの増加にしたがって増加するとともに車速vの増加にしたがって減少する基本アシストトルクTasを設定記憶したものである。また、アシスト電流指令部111は、操舵角センサ41により検出される操舵角θhを入力し、基本アシストトルクTasに対する補償値Trtを計算する。補償値Trtは、例えば、操舵角θhに比例して大きくなる操舵軸12の基本位置への復帰力と、操舵角θhを時間微分した操舵速度ωhに比例して大きくなる操舵軸12の回転に対する抵抗力に対応した戻しトルクとの和として計算される。アシスト電流指令部111は、計算した基本アシストトルクTasと補償値Trtの和を目標アシストトルクT*として設定し、この目標アシストトルクT*をトルク定数で除算することにより、d−q座標系におけるq軸指令電流Iq*を算出する。
As shown in FIG. 2, the
マイコン部110は、3相通電制御を行う場合には、電動モータ31の回転方向をq軸とするとともに回転方向と直交する方向をd軸とするd−q座標系で記述されるベクトル制御によって電動モータ31の回転を制御する。d軸電流は、電動モータ31のトルクを発生させるように働かず、弱め界磁制御に使用される。本実施形態においては、アシスト電流指令部111は、d軸指令電流Id*をゼロ(Id*=0)に設定する。
When performing three-phase energization control, the
このように計算されたq軸指令電流Iq*とd軸指令電流Id*は、フィードバック制御部112に出力される。フィードバック制御部112は、q軸指令電流Iq*からq軸実電流Iqを減算した偏差ΔIqを算出し、この偏差ΔIqを使った比例積分制御によりq軸実電流Iqがq軸指令電流Iq*に追従するようにq軸指令電圧Vq*を計算する。同様に、d軸指令電流Id*からd軸実電流Idを減算した偏差ΔIdを算出し、この偏差ΔIdを使った比例積分制御によりd軸実電流Idがd軸指令電流Id*に追従するようにd軸指令電圧Vd*を計算する。
The q-axis command current Iq * and the d-axis command current Id * calculated in this way are output to the
q軸実電流Iqおよびd軸実電流Idは、電動モータ31のコイルに実際に流れた3相電流の検出値Iu,Iv,Iwをd−q座標系の2相電流に変換したものである。この3相電流Iu,Iv,Iwからd−q座標系の2相電流Id,Iqへの変換は、3相/2相座標変換部113によって行われる。3相/2相座標変換部113は、回転角変換部114から出力されるモータ電気角θeを入力し、そのモータ電気角θeに基づいて、電流センサ131から出力される3相電流Iu,Iv,Iwをd−q座標系の2相電流Id,Iqに変換する。回転角変換部114は、回転角センサ40から出力される回転角θmに基づいて、モータ電気角θeを算出する電気角検出手段である。以下、モータ電気角θeを、単に、電気角θeと呼ぶ。
The q-axis actual current Iq and the d-axis actual current Id are obtained by converting the detected values Iu, Iv, and Iw of the three-phase current actually flowing in the coil of the
フィードバック制御部112により算出されたq軸指令電圧Vq*とd軸指令電圧Vd*は、2相/3相座標変換部115に出力される。2相/3相座標変換部115は、回転角変換部114から出力される電気角θeに基づいて、q軸指令電圧Vq*とd軸指令電圧Vd*を3相指令電圧Vu*,Vv*,Vw*に変換して、その変換した3相指令電圧Vu*,Vv*,Vw*をPWM信号発生部116に出力する。PWM信号発生部116は、3相指令電圧Vu*,Vv*,Vw*に対応したPWM制御信号をモータ駆動回路130の各スイッチング素子に出力する。これにより電動モータ31が駆動され、目標アシストトルクT*に追従した操舵アシストトルクがステアリング機構に付与される。
The q-axis command voltage Vq * and the d-axis command voltage Vd * calculated by the
次に、2相通電制御について説明する。電動モータ31は、通常、図3(a)に示すように、電気角で120deg位相をずらした正弦波状の電流を3相に通電する。この場合には、電気角の変化に対して一定のモータトルクが得られる。しかし、3相のうちの1相が断線等により通電不良を生じると、図3(b)に示すように、モータトルクは電気角に応じて大きく変動する。このため、操舵操作に引っ掛かりが発生する。
Next, two-phase energization control will be described. As shown in FIG. 3A, the
そこで、2相通電時には、モータ電気角の変化に対してモータトルクが一定となる2相通電用電流演算式を用いて指令電流を演算し、演算された指令電流で2相に通電すれば、理論的には一定のモータトルクが得られる。この2相通電用電流演算式は、次のように表すことができる。
この2相通電用電流演算式によれば、電気角θeが90degあるいは270degとなる回転位置において2相通電用の電流が無限大となるが、電動モータ31やモータ駆動回路130を過電流から保護するために、マイコン部110には、電動モータ31に流すことのできる最大電流が予め設定されている。従って、2相通電時における指令電流の電流波形は、図4(a)に示すようになる。図中、破線で囲んだ部分が電流制限の働いた領域である。尚、図4(a)は、1相の電流波形を表したもので、もう一方の相の電流波形は、この波形の符号を反転したものとなる。
According to the current calculation formula for two-phase energization, the current for two-phase energization is infinite at the rotational position where the electrical angle θe is 90 deg or 270 deg, but the
このような電流を電動モータ31に通電した場合、電動モータ31で発生するトルクは図4(b)に示すように、電流制限が働いた領域において減少してしまう。従って、その電気角近傍領域においてモータトルクが不足し、その位置から電動モータ31を回転できなくなるおそれがある。このため、操舵操作に引っ掛かりが発生する。
When such an electric current is applied to the
そこで、本実施形態においては、電気角θeを予め設定した進角量θaだけモータ回転方向に進めて指令電流を演算する。つまり、2相通電用の電流を電気角θeに対して進角量θaだけ前だしするように2相通電用電流演算式の電気角θeを補正して演算し、この演算して得られた電流に最大電流制限を付加して指令電流を算出する。電気角を進めた指令電流は、図5に実線にて示すような波形となる。この例は、進角量θaを約20degに設定している。 Therefore, in the present embodiment, the command current is calculated by advancing the electrical angle θe in the motor rotation direction by a preset advance amount θa. That is, the electric angle θe of the two-phase energization current calculation formula is corrected and calculated so that the current for two-phase energization is advanced by the advance amount θa with respect to the electric angle θe, and obtained by this calculation. The command current is calculated by adding a maximum current limit to the current. The command current with the advanced electrical angle has a waveform as shown by a solid line in FIG. In this example, the advance amount θa is set to about 20 deg.
このように電気角を進めて指令電流を設定すると、モータトルクは、図6に示すような特性となる。図中において、T0は、予め設定した走行条件下における、操舵方向とは反対方向にタイヤを戻そうとする反力を表している。従って、モータトルクが反力T0を越えれば、運転者の操舵力なしでも操舵可能であり、モータトルクが反力T0に満たなければ、その不足分だけ運転者の操舵力が必要となる。この図からわかるように、モータトルクが反力T0を越える電気角領域と、反力T0に満たない電気角領域とが存在する。以下、モータトルクが反力T0を越える電気角領域を過アシスト領域Aと呼び、反力T0に満たない電気角領域を不足アシスト領域Bと呼ぶ。 When the command angle is set by advancing the electrical angle in this way, the motor torque has characteristics as shown in FIG. In the figure, T0 represents a reaction force for returning the tire in the direction opposite to the steering direction under preset traveling conditions. Therefore, if the motor torque exceeds the reaction force T0, the vehicle can be steered without the driver's steering force. If the motor torque does not reach the reaction force T0, the driver's steering force is required by the shortage. As can be seen from this figure, there are an electrical angle region where the motor torque exceeds the reaction force T0 and an electrical angle region where the motor torque is less than the reaction force T0. Hereinafter, an electrical angle region where the motor torque exceeds the reaction force T0 is referred to as an over assist region A, and an electrical angle region where the motor torque is less than the reaction force T0 is referred to as an insufficient assist region B.
また、不足アシスト領域B内には、モータトルクが操舵方向と逆方向に働く電気角領域も存在する。以下、不足アシスト領域Bを、モータトルクが操舵方向と同じ方向に働く電気角領域と、逆方向に働く電気角領域とに分けて説明する場合には、前者の電気角領域を不足アシスト正領域B1と呼び、後者の電気角領域を逆アシスト領域B2と呼ぶ。過アシスト領域Aから逆アシスト領域B2に切り替わるポイントは、電動モータ31の相電流の符号が反転する回転位置(電気角)となる。この例では、(90deg−θa)および(270deg−θa)の電気角において過アシスト領域Aから逆アシスト領域B2に切り替わる。
Further, in the shortage assist region B, there is also an electrical angle region where the motor torque works in the direction opposite to the steering direction. In the following, when the shortage assist region B is described separately as an electric angle region where the motor torque works in the same direction as the steering direction and an electric angle region where the motor torque works in the opposite direction, the former electric angle region is referred to as the short assist normal region. The latter electrical angle region is called a reverse assist region B2. The point at which the over assist area A is switched to the reverse assist area B2 is a rotational position (electrical angle) at which the sign of the phase current of the
本実施形態においては、モータトルク特性に、過アシスト領域Aと逆アシスト領域B2とを設けることにより、これらの領域A,B2を利用して引っ掛かりなく電動モータ31を回転できるようにしている。以下、その理由を説明する。
In the present embodiment, the over assist region A and the reverse assist region B2 are provided in the motor torque characteristics, so that the
電動モータ31は、図7に示す回転方向に回転している場合、過アシスト領域Aにおいて加速していき運動エネルギーを蓄える。そして、不足アシスト領域Bに入ると、今度は反力により減速していく。つまり、過アシスト領域Aが加速区間となり、不足アシスト領域Bが減速区間となる。この場合、過アシスト領域Aにおいて蓄えた運動エネルギーが、不足アシスト領域Bで失う運動エネルギーよりも大きければ、電動モータ31は、引っ掛かりなく回転することができる。
When the
ただし、操舵速度(モータの回転速度)が遅い場合などでトルクフィードバックが応答してしまった場合には、図8に示すように、モータトルクが減少する。このため、過アシスト領域Aが減少し、過アシスト領域Aで十分に加速することができなくなる。十分な加速が得られないと、不足アシスト領域Bにおいてモータトルクと操舵力(運転者が操舵ハンドルに加えた操舵力)との合計が反力T0より小さい場合には、不足アシスト領域Bを通過しきれなくなり、反力により電動モータ31が途中で逆回転する。例えば、図9に示す不足アシスト正領域B1の電気角θsで停止し、その位置から矢印方向に逆戻りする。
However, when torque feedback responds, for example, when the steering speed (rotational speed of the motor) is low, the motor torque decreases as shown in FIG. For this reason, the over assist area A decreases, and the over assist area A cannot be sufficiently accelerated. If sufficient acceleration cannot be obtained, if the sum of the motor torque and the steering force (the steering force applied by the driver to the steering wheel) in the shortage assist region B is smaller than the reaction force T0, the shortage assist region B is passed. The
この場合、電動モータ31は、必ず逆アシスト領域B2にまで戻り、そこで操舵方向とは逆方向となるトルクを発生させ、そのトルクと反力との合力により、そのまま過アシスト領域A内にまで一気に戻る。これにより、電動モータ31は、過アシスト領域Aにおいて正回転方向にトルクを発生させて加速を開始する。つまり、逆アシスト領域B2を使って電動モータ31の回転位置(電気角θe)を過アシスト領域Aにまで戻し、過アシスト領域Aにおいて再度加速させる。そして、過アシスト領域Aを通過中に蓄えた運動エネルギーを使って不足アシスト領域Bを通過する。これにより、引っ掛かりを発生させることなく電動モータ31を操舵方向に回転させることができる。尚、過アシスト領域Aに戻って再加速させても不足アシスト領域Bを通過できなかったときには、再度、逆アシスト領域B2を介して過アシスト領域Aに戻るため、上述した動作を繰り返すことにより不足アシスト領域Bを通過できるようになる。
In this case, the
こうした2相通電制御を行うマイコン部110の機能について、図2を用いて説明する。マイコン部110は、2相通電指令部117および通電不良検出部118を備えている。2相通電指令部117は、通電不良検出部118から1相の通電不良検出信号を入力したときに作動を開始する。
The function of the
通電不良検出部118は、PWM信号発生部116の出力するPWM制御信号と、操舵角センサ41の出力する操舵角θhと、電流センサ131の出力する3相電流Iu,Iv,Iwとを入力して、電動モータ31への通電不良を相別に区別して検出する。電動モータ31への通電不良とは、電動モータ31に良好に電力供給できない不良を意味し、例えば、モータ駆動回路130内の不良(特に、スイッチング素子の接点不良)、モータ駆動回路130から電動モータ31への電力供給ラインの断線等に起因して発生する不良である。
The conduction
通電不良検出部118は、例えば、電流センサ131により検出される相電流が予め設定した基準電流より小さいときに、操舵角θhを時間微分して得られる操舵速度ωhの大きさ(絶対値)が基準速度よりも小さく、かつ、PWM制御信号により特定されるデューティ比(オンデューティ比)が基準デューティ比よりも大きいか否かを判断する。そして、操舵速度|ω|が基準速度よりも小さく、かつ、デューティ比が基準デューティ比よりも大きい場合には、その相に通電不良が発生していると判定する。つまり、操舵速度|ω|が小さく逆起電力の発生が少ない状態で、モータ駆動回路130に出力したPWM制御信号により本来流れるはずの相電流が流れない場合に通電不良と判定する。
For example, when the phase current detected by the
通電不良検出部118は、こうした通電不良判定を各相毎に周期的に行い、通電不良が検出されていないあいだは通電正常信号を出力する。そして、通電不良を検出した場合には、通常正常信号に代えて通電不良相を特定する通電不良検出信号を出力する。また、通電不良検出部118は、通電不良を検出した場合、電動モータ31の電力供給ラインに設けた遮断回路(図示略)の通電不良相に対応するスイッチにオフ信号を出力して、通電不良相の通電を遮断する。以下、通電不良検出部118の出力する信号(通電正常信号および通電不良相を特定する通電不良検出信号)を通電判定信号と呼ぶ。
The energization
2相通電指令部117は、通電不良検出部118から1相の通電不良検出信号を入力すると、2相通電用電流演算式と最大電流と進角量θaとに基づいて、2相通電用の指令電流Iu*,Iv*,Iw*を計算する。この場合、通電不良相の指令電流は計算しない。2相通電用電流演算式は、アシスト電流指令部111が出力するq軸指令電流q*と、回転角変換部114が出力する電気角θeとを使って次式のように表される。
この演算式と最大電流の制限とにより、2相通電用の指令電流は、図5において実線にて示す波形となる。尚、進角量θaは、一定値でも良いが、本実施形態においては、図10に示すように、操舵トルクTrに応じた値に設定される。この例では、進角量の大きさ|θa|は、操舵トルクTrがゼロとなる近傍においては、操舵トルクTrの増加にしたがって増加し、操舵トルクTrがゼロとなる近傍以外では一定値の20degに設定される。従って、2相通電指令部117は、指令電流の演算にあたっては、操舵トルクセンサ42から出力される操舵トルクTrを読み込んで行う。尚、操舵トルクTrが負の方向(左方向)に働く場合には、進角量θaも負の値となる。つまり、電気角が増加する側に電動モータ31を回転させるときには、正の進角量θaを設定し、電気角が減少する側に電動モータ31を回転させるときには、負の進角量θaを設定する。これにより、電動モータ31を回転させる方向に電気角を進めることができる。
Due to this arithmetic expression and the limitation on the maximum current, the command current for two-phase energization has a waveform shown by a solid line in FIG. The advance amount θa may be a constant value, but in the present embodiment, as shown in FIG. 10, it is set to a value corresponding to the steering torque Tr. In this example, the magnitude of the advance angle | θa | increases as the steering torque Tr increases in the vicinity where the steering torque Tr becomes zero, and is a constant value of 20 degrees except in the vicinity where the steering torque Tr becomes zero. Set to Therefore, the two-phase
このように計算された2相通電用の指令電流Iu*,Iv*,Iw*(3相のうち正常相となる2相に流す指令電流)は、2相通電用フィードバック制御部119に出力される。2相通電用フィードバック制御部119は、通電不良検出部118から1相の通電不良検出信号を入力すると作動を開始する。このとき通電不良検出信号は、フィードバック制御部112にも出力される。フィードバック制御部112は、通電不良検出信号を入力すると、その作動を停止する。従って、1相の通電不良が検出された場合には、d−q座標系による電流フィードバック制御に代わって、2相通電用の電流フィードバック制御が開始される。
The command currents Iu *, Iv *, and Iw * for two-phase energization calculated in this way (command currents that flow through the two phases that are normal among the three phases) are output to the
2相通電用フィードバック制御部119は、電流センサ131から出力される3相電流Iu,Iv,Iw(3相のうち正常相となる2相に流れる実電流)を入力し、2相通電用の指令電流Iu*,Iv*,Iw*(3相のうち正常相となる2相分の指令電流)との偏差ΔIu,ΔIv,ΔIwを算出し、この偏差ΔIu,ΔIv,ΔIwを使った比例積分制御により3相電流Iu,Iv,Iwが2相通電用の指令電流Iu*,Iv*,Iw*に追従するように2相通電用の指令電圧Vu*,Vv*,Vw*(3相のうち正常相となる2相分の指令電圧)を算出する。
The two-phase energization
2相通電用フィードバック制御部119は、算出した2相通電用の指令電圧Vu*,Vv*,Vw*をPWM信号発生部116に出力する。PWM信号発生部116は、2相通電用の指令電圧Vu*,Vv*,Vw*に対応したPWM制御信号をモータ駆動回路130に出力する。これにより電動モータ31が駆動され、目標アシストトルクT*に追従した操舵アシストトルクがステアリング機構に付与される。この場合、2相通電用電流演算式の電気角θeを進角量θaだけ進めているため、電動モータ31の回転が引っかからず、良好な操舵アシストを行うことができる。
The two-phase energization
ところで、電動モータ31の2相通電時においては、上述したように電気角を進めることにより過アシスト領域Aと逆アシスト領域B2とを設けて電動モータ31を良好に回転させることができるが、図11に示すように、モータトルク特性と反力との関係から、過アシスト領域Aと逆アシスト領域B2(過アシスト領域Aの回転方向側の逆アシスト領域B2)とのあいだに不足アシスト領域Cが生じるケースがある。そして、この過アシスト領域Aと逆アシスト領域B2とのあいだの不足アシスト領域Cからモータ回転を開始させる場合、あるいは、極低速操舵により電動モータ31がこの不足アシスト領域Cに到達した場合には、電動モータ31は、自身の発生するトルクでは反力に打ち勝って逆アシスト領域B2にまで回転することができないし、反力により逆回転方向に回されても過アシスト領域A内にまで戻ることもできない。従って、例えば、図11における電気角θ1から電動モータ31を回転させるためには、逆アシスト領域にまで進めるためのトリガトルクTtrが必要となり、その分だけ、運転者に一時的に大きな操舵力が必要となり違和感を与えてしまう。
By the way, when the
そこで、本実施形態においては、こうした状況が発生したときの違和感を防止するために、マイコン部110に舵角比変更指令部120を備えている。舵角比変更指令部120は、通電不良検出部118から出力される通電判定信号と、操舵トルクセンサ42から出力される操舵トルクTrと、回転角変換部114から出力される電気角θeを入力し、通電判定信号が通電不良検出信号となった場合に作動を開始する。
Therefore, in this embodiment, in order to prevent a sense of incongruity when such a situation occurs, the
舵角比変更指令部120の機能については、図12に示すフローチャートを使って説明する。このフローチャートは、舵角比変更指令部120の実行する回転アシスト制御ルーチンを表し、マイコン部110のROM内に制御プログラムとして記憶され、通電判定信号として通電不良検出信号が入力されているあいだ、所定の短い周期で繰り返し実行される。
The function of the steering angle ratio
回転アシスト制御ルーチンが起動すると、舵角比変更指令部120は、ステップS11において、回転角変換部114により検出される電気角θeを読み込み、続くステップS12において、電気角θeの変化の大きさを表す電気角速度|ωe|を算出する。電気角速度|ωe|は、電気角θeを時間微分することにより求めることができる。この電気角速度|ωe|は、電動モータ31の回転速度を表すものである。
When the rotation assist control routine is started, the steering angle ratio
続いて、舵角比変更指令部120は、ステップS13において、検出された電気角速度|ωe|が判定基準速度ωe0よりも小さいか否かを判定する。判定基準速度ωe0は、極低速操舵操作(操舵ハンドル11が回動していない場合も含む)を判定するための閾値であるため、非常に小さな値に設定されている。
Subsequently, the steering angle ratio
舵角比変更指令部120は、ステップS13において極低速操舵操作中ではないと判定した場合には、ステップS14において、舵角比変更フラグFが「1」に設定されているか否かを判断する。この舵角比変更フラグFは、後述する舵角比変更指令が出力されているときに「1」に設定されるもので、回転アシスト制御ルーチンの起動時においては「0」に設定されている。従って、ここでは、F=0であるため「No」と判定され、回転アシスト制御ルーチンを一旦終了する。回転アシスト制御ルーチンは、所定の短い周期で繰り返される。従って、ステップS11,S12,S13,S14の処理が繰り返されることになる。
If the rudder angle ratio
そして、ステップS13において極低速操舵操作中であると判定されると、舵角比変更指令部120は、ステップS15において、操舵トルクセンサ42により検出される操舵トルクTrを読み込み、続くステップS16において、操舵トルクTrが判定基準操舵トルクTr0以上であるか否かを判断する。例えば、図11に示す電気角θ1からモータ回転を開始させる場合、あるいは、極低速操舵操作で不足アシスト領域Cに入った場合には、モータトルク不足が発生し操舵トルクTrが大きくなる。この場合には、ステップS16の判断は「Yes」となり、舵角比変更指令部120は、ステップS17において、舵角比可変装置80のマイコン部60に対して舵角比変更指令を出力して振動停止制御ルーチンを一旦終了する。この舵角比変更指令は、舵角比変更フラグFを「1」に設定することにより行われる。
When it is determined in step S13 that the steering operation is extremely low, the steering angle ratio
舵角比可変装置80のマイコン部60は、通常時においては、上述したように車速vに応じて設定される目標相対角Δθv*が得られるように電動モータ22を駆動制御するが、マイコン部110の舵角比変更指令部120から舵角比変更指令(F=1)を入力した場合には、目標相対角Δθv*を変更する。図13は、舵角比可変装置80のマイコン部60の実行する舵角比変更ルーチンを表す。舵角比変更ルーチンは、所定の短い周期で繰り返される。マイコン部60は、ステップS21において、電動パワーステアリング装置200のマイコン部110(舵角比変更指令部120)から出力される舵角比変更フラグFを読み込み、舵角比変更フラグFが「1」であるか否かを判断する。そして、舵角比変更フラグFが「0」であれば、そのまま舵角比変更ルーチンを終了する。
The
一方、舵角比変更フラグFが「1」であれば、ステップS22において、目標相対角Δθv*に予め設定した回転アシスト用角度θvaだけ加算した角度を、あらたな目標相対角Δθv*として設定する。従って、舵角比変更フラグFが「0」から「1」に切り替わったときには、電動モータ22が回転アシスト用角度θvaだけ回転することになる。この回転アシスト用角度θvaは、電動パワーステアリング装置200の電動モータ31の電気角が、逆アシスト領域B2にまで移動するだけの微小角度に設定されている。従って、舵角比可変装置80の電動モータ22が回転アシスト用角度θvaだけ回転することにより、電動モータ31のロータがステアリング機構を介して回されることになる。これにより、電動モータ31は、図11に示すように、その電気角が不足アシスト領域Cから逆アシスト領域B2にまで進む。従って、逆アシスト領域B2で操舵方向とは逆方向となるトルクを発生させ、そのトルクと反力との合力により、過アシスト領域A内にまで一気に戻る。そして、過アシスト領域Aにおいて正回転方向にトルクを発生させて加速を開始し、そこで蓄えた運動エネルギーにより不足アシスト領域C、逆アシスト領域B2、不足アシスト領域B1を通過する。これにより、引っ掛かりを発生させることなく電動モータ31を操舵方向に回転させることができる。尚、回転アシスト用角度θvaは、電動モータ31の電気角を隣の逆アシスト領域B2へ進めるだけの角度、あるいは、それよりも操舵方向に進めるような角度に設定すればよい。
On the other hand, if the steering angle ratio change flag F is “1”, in step S22, an angle obtained by adding a preset rotation assist angle θva to the target relative angle Δθv * is set as a new target relative angle Δθv *. . Therefore, when the steering angle ratio change flag F is switched from “0” to “1”, the
図12の回転アシスト制御ルーチンの説明に戻る。回転アシスト制御ルーチンは、舵角比変更フラグFを「1」に切り替えた後においても繰り返し実施される。舵角比変更フラグFを「1」に切り替えた場合には、舵角比可変装置80の作動により電動パワーステアリング装置200の電動モータ31が回されるため、電気角速度|ωe|は増加して判定基準速度ωe0よりも大きくなる。従って、舵角比変更指令部120は、ステップS13において「No」と判定し、続くステップS14において舵角比変更フラグFが「1」であるか否かについて判断する。この場合、舵角比変更フラグFが「1」に設定されているため、次に、ステップS18において、電気角速度|ωe|が判定基準速度ωe0よりも大きい状態で舵角比変更フラグFが「1」となっている時間が予め設定した所定時間に達したか否かを判断する。所定時間に達しないあいだは、回転アシスト制御ルーチンをそのまま抜ける。そして、電気角速度|ωe|が判定基準速度ωe0よりも大きい状態で舵角比変更フラグFが「1」となっている時間が所定時間に達すると、舵角比変更指令部120は、ステップS19において舵角比戻し指令を舵角比可変装置80のマイコン部60に出力して回転アシスト制御ルーチンを一旦終了する。この舵角比戻し指令は、舵角比変更フラグFを「0」にリセットすることにより行われる。
Returning to the description of the rotation assist control routine of FIG. The rotation assist control routine is repeatedly executed even after the steering angle ratio change flag F is switched to “1”. When the steering angle ratio change flag F is switched to “1”, since the
舵角比可変装置80のマイコン部60は、舵角比変更フラグFが「0」にリセットされると、舵角比変更ルーチンにおけるステップS21の判断が「No」となり、目標相対角Δθv*に対する回転アシスト用角度θvaの加算補正を行わないようになる。従って、目標相対角Δθv*がオリジナルの目標相対角Δθv*に戻される。このため、電動モータ22は、回転アシスト用角度θvaだけ逆方向に回転することになる。この場合、それに伴って電動パワーステアリング装置200の電動モータ31も回されることになるが、ステップS18の時間経過処理により、すでに電動モータ31がある程度回転しているため、電動モータ31が同じ電気角度位置に戻ることはない。また、電動モータ22の回転は、回転アシスト用角度θvaが微小角度であるため、運転者には何ら違和感を与えるものではない。
When the steering angle ratio change flag F is reset to “0”, the
以上説明した本実施形態の車両のステアリング装置によれば、電動パワーステアリング装置200における電動モータ31の1相の通電不良が発生した場合であっても、進角量θaを与えた2相通電制御を行うことにより、電動モータ31を良好に回転させることができる。これにより、2相通電制御時における操舵操作フィーリングの低下を抑制することができる。また、電動モータ31が過アシスト領域Aと逆アシスト領域B2とのあいだの不足アシスト領域Cの位置から回転開始する場合には、舵角比可変装置80に舵角比変更指令を出力して電動モータ31の電気角をずらすため、電動モータ31をスムーズに回転させることができる。従って、運転者に違和感を与えないようにすることができる。
According to the vehicle steering apparatus of the present embodiment described above, the two-phase energization control that gives the advance amount θa even when the one-phase energization failure of the
以上、本実施形態の車両のステアリング装置について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。 As mentioned above, although the vehicle steering device of this embodiment was demonstrated, this invention is not limited to the said embodiment, A various change is possible unless it deviates from the objective of this invention.
例えば、本実施形態においては、電動モータ31の回転速度を電気角速度ωeにて検出しているが、電気角速度ωeの検出に代えて操舵速度ωhの検出を行うようにしてもよい。この場合、ステップS13における判定基準速度ωe0に代えて、極低速操舵操作を判定する判定基準速度ωh0を用いるようにすればよい。
For example, in the present embodiment, the rotational speed of the
また、本実施形態においては、電動モータ31の発生するトルクをラックバー14に付与するラックアシスト式の電動パワーステアリング装置を備えているが、電動モータの発生するトルクを操舵軸12に付与するコラムアシスト式の電動パワーステアリング装置を備えたものであってもよい。
In this embodiment, the rack assist type electric power steering device that applies the torque generated by the
11…操舵ハンドル、12…操舵軸、20…舵角比可変機構、22…電動モータ、30…パワーアシスト機構、31…電動モータ、40…回転角センサ、41…操舵角センサ、42…操舵トルクセンサ、43…相対角センサ、44…車速センサ、50…舵角比ECU、60…マイコン部、100…操舵アシストECU、110…マイコン部、111…アシスト電流指令部、112…フィードバック制御部、113…3相/2相座標変換部、114…回転角変換部、115…2相/3相座標変換部、116…PWM制御信号発生部、117…2相通電指令部、118…通電不良検出部、119…2相通電用フィードバック制御部、120…舵角比変更指令部、130…モータ駆動回路、131…電流センサ。
DESCRIPTION OF
Claims (1)
操舵ハンドルの操舵角に対する操舵輪の転舵角の比である舵角比を可変する舵角比可変装置と
を備えた車両のステアリング装置において、
前記電動パワーステアリング装置は、
前記モータの電気角を検出する電気角検出手段と、
前記モータの各相への通電不良の発生を検出する通電不良検手段と、
前記モータへの通電不良が1相だけ発生しているときに、通電不良が発生していない2相を使って前記モータの電気角の変化に対して変動しない操舵アシストトルクを出力するための理論上の2相通電用電流演算式と、前記モータの上限電流を規定する最大電流と、前記2相通電用電流演算式における前記モータの電気角を進める進角量とに基づいて、2相通電用の指令電流を演算し、演算した2相通電用の指令電流にて通電不良の発生していない2相に通電して前記モータを駆動制御する2相通電制御手段と、
前記2相通電制御手段により前記モータが駆動制御されているときに、操舵軸に入力される操舵トルクを検出し、操舵トルクが予め設定した判定基準操舵トルク以上であるか否かを判定する操舵トルク判定手段と、
前記2相通電制御手段により前記モータが駆動制御されているときに、前記モータあるいは操舵軸の回転速度を検出し、回転速度が予め設定した判定基準速度未満であるか否かを判定する回転速度判定手段と、
前記操舵トルク判定手段により前記操舵トルクが前記判定基準操舵トルク以上であると判定され、かつ、前記回転速度判定手段により前記回転速度が前記判定基準速度未満であると判定されたとき、前記舵角比可変装置に対して舵角比の変更指令を出力する舵角比変更指令手段と
を備えたことを特徴とする車両のステアリング装置。 An electric power steering device that drives and controls a three-phase motor to apply a steering assist torque to the steering mechanism;
In a vehicle steering apparatus comprising: a steering angle ratio variable device that varies a steering angle ratio that is a ratio of a steering angle of a steered wheel to a steering angle of a steering wheel.
The electric power steering device is
An electrical angle detection means for detecting an electrical angle of the motor;
An energization failure detection means for detecting the occurrence of energization failure to each phase of the motor;
Theory for outputting a steering assist torque that does not fluctuate with respect to changes in the electrical angle of the motor, using two phases in which no current failure has occurred, when there is only one phase of current failure in the motor. Two-phase energization based on the above two-phase energization current calculation formula, the maximum current that defines the upper limit current of the motor, and the advance amount of the electric angle of the motor in the two-phase energization current calculation formula 2-phase energization control means for energizing the motor to drive the motor by energizing the 2-phase in which energization failure does not occur with the calculated 2-phase energization command current;
When the motor is driven and controlled by the two-phase energization control means, the steering torque input to the steering shaft is detected, and the steering for determining whether or not the steering torque is greater than or equal to a preset reference steering torque. Torque determination means;
When the motor is driven and controlled by the two-phase energization control means, the rotational speed of the motor or the steering shaft is detected to determine whether the rotational speed is less than a preset reference speed. A determination means;
When the steering torque determining means determines that the steering torque is greater than or equal to the determination reference steering torque, and the rotation speed determination means determines that the rotation speed is less than the determination reference speed, the steering angle A steering apparatus for a vehicle, comprising: a steering angle ratio change command means for outputting a steering angle ratio change command to the variable ratio device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009011687A JP2010167881A (en) | 2009-01-22 | 2009-01-22 | Steering device of vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009011687A JP2010167881A (en) | 2009-01-22 | 2009-01-22 | Steering device of vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010167881A true JP2010167881A (en) | 2010-08-05 |
Family
ID=42700445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009011687A Pending JP2010167881A (en) | 2009-01-22 | 2009-01-22 | Steering device of vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010167881A (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012076733A (en) * | 2010-09-06 | 2012-04-19 | Jtekt Corp | Electric power steering device |
| JP2012235559A (en) * | 2011-04-28 | 2012-11-29 | Jtekt Corp | Motor control device and vehicular steering apparatus |
| JP2013138537A (en) * | 2011-12-28 | 2013-07-11 | Denso Corp | Motor control apparatus |
| JP2014141187A (en) * | 2013-01-24 | 2014-08-07 | Toyota Motor Corp | Steering control system of vehicle |
| WO2015199104A1 (en) * | 2014-06-26 | 2015-12-30 | 日立オートモティブシステムズ株式会社 | Motor drive device |
| CN111114624A (en) * | 2018-10-30 | 2020-05-08 | 丰田自动车株式会社 | Steering system and control method for steering system |
-
2009
- 2009-01-22 JP JP2009011687A patent/JP2010167881A/en active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012076733A (en) * | 2010-09-06 | 2012-04-19 | Jtekt Corp | Electric power steering device |
| JP2012235559A (en) * | 2011-04-28 | 2012-11-29 | Jtekt Corp | Motor control device and vehicular steering apparatus |
| JP2013138537A (en) * | 2011-12-28 | 2013-07-11 | Denso Corp | Motor control apparatus |
| US9000700B2 (en) | 2011-12-28 | 2015-04-07 | Denso Corporation | Motor control apparatus |
| JP2014141187A (en) * | 2013-01-24 | 2014-08-07 | Toyota Motor Corp | Steering control system of vehicle |
| WO2015199104A1 (en) * | 2014-06-26 | 2015-12-30 | 日立オートモティブシステムズ株式会社 | Motor drive device |
| CN106416051A (en) * | 2014-06-26 | 2017-02-15 | 日立汽车系统株式会社 | Motor drive device |
| JPWO2015199104A1 (en) * | 2014-06-26 | 2017-04-20 | 日立オートモティブシステムズ株式会社 | Motor drive device |
| CN106416051B (en) * | 2014-06-26 | 2019-06-14 | 日立汽车系统株式会社 | Motor drive |
| US10447183B2 (en) | 2014-06-26 | 2019-10-15 | Hitachi Automotive Systems, Ltd. | Motor drive device |
| CN111114624A (en) * | 2018-10-30 | 2020-05-08 | 丰田自动车株式会社 | Steering system and control method for steering system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2907729B1 (en) | Electric Power Steering Apparatus | |
| KR100914424B1 (en) | Electric power steering device, and control method thereof | |
| US20180079447A1 (en) | Steering Device | |
| US10272941B2 (en) | Vehicle steering device | |
| JP5971512B2 (en) | Vehicle steering system | |
| JP5262931B2 (en) | Electric power steering device | |
| JP2018047884A (en) | Steering device | |
| JP6115368B2 (en) | Steering device | |
| EP2323250B1 (en) | Motor control unit and vehicle steering system | |
| JP2009027905A (en) | Motor control apparatus, and electric power steering apparatus | |
| JP4710528B2 (en) | Electric power steering device | |
| JP2017024683A (en) | Vehicular steering device | |
| JP2010167881A (en) | Steering device of vehicle | |
| JP5263079B2 (en) | Electric power steering device | |
| US10343710B2 (en) | Vehicle steering system | |
| JP2010167878A (en) | Electric power steering device | |
| JP3915595B2 (en) | Rotation angle detection device using resolver and control device using this device | |
| JP2009046005A (en) | Electric power steering device | |
| JP5012157B2 (en) | Electric power steering device | |
| JP2010137627A (en) | Electric power steering device | |
| JP2008006919A (en) | Electric power steering device | |
| JP2014139039A (en) | Electric power steering device | |
| JP2010167879A (en) | Steering device of vehicle | |
| JP2010167880A (en) | Electric power steering device | |
| JP2008183987A (en) | Electric power steering device |