JP2010039832A - Image processor and image processing program - Google Patents
Image processor and image processing program Download PDFInfo
- Publication number
- JP2010039832A JP2010039832A JP2008203090A JP2008203090A JP2010039832A JP 2010039832 A JP2010039832 A JP 2010039832A JP 2008203090 A JP2008203090 A JP 2008203090A JP 2008203090 A JP2008203090 A JP 2008203090A JP 2010039832 A JP2010039832 A JP 2010039832A
- Authority
- JP
- Japan
- Prior art keywords
- value
- low
- pass filter
- target pixel
- dimensional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012937 correction Methods 0.000 claims abstract description 94
- 238000012545 processing Methods 0.000 claims abstract description 63
- 238000000034 method Methods 0.000 claims description 29
- 230000035945 sensitivity Effects 0.000 claims description 4
- 238000001514 detection method Methods 0.000 abstract description 10
- 230000002542 deteriorative effect Effects 0.000 abstract 1
- 239000003086 colorant Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 238000011946 reduction process Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 2
- 238000003672 processing method Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 238000007429 general method Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
Images









Landscapes
- Image Processing (AREA)
- Facsimile Image Signal Circuits (AREA)
- Studio Devices (AREA)
Abstract
Description
この発明は、ディジタルカメラなどの入力画像に混入するノイズを除去する画像処理装置および画像処理プログラムに関するものである。 The present invention relates to an image processing apparatus and an image processing program for removing noise mixed in an input image such as a digital camera.
CCD等の撮像素子を備えたディジタルカメラやイメージスキャナなどの画像入力装置、およびこの種の画像入力装置から入力した画像を表示するディスプレイや印刷するカラープリンタ等の画像出力装置では、画像入力系あるいは画像伝送系において画像データにノイズが混入する。この種のノイズは、装置内で画像処理により除去されるのが一般的である。こうした画像入出力装置のうち、ディジタルカメラにおいて混入したノイズを除去する従来の方法について説明する。
ノイズを除去する最も平易で一般的な方法としては、画像処理対象である画素(以下、注目画素と称す)を中心にした複数画素からなる処理ウィンドウを構成し、処理ウィンドウ内の周辺画素の信号レベル値と注目画素の信号レベル値を重み付けして畳み込み演算することによりローパスフィルタをかけるという技術がある。しかしながら、この方法を用いた場合、ノイズ以外の画像に存在する有意なエッジに対しても一律にローパスフィルタがかかるため、画像の解像度を低下させてしまうという問題がある。
また、他の方法として、処理ウィンドウについて、PrewittやSobelなどのオペレータを適用することでエッジを検出し、注目画素が画像中の有意なエッジであると判断した場合にはローパスフィルタの強度を弱め、あるいは周辺に存在するエッジを構成する画素を避ける方向性を持たせてローパスフィルタをかけることで、画像の解像度低下を抑えながらノイズを除去するという技術が提案されている(例えば特許文献1参照)。
In an image input device such as a digital camera or image scanner equipped with an image sensor such as a CCD, and an image output device such as a display for displaying an image input from this type of image input device or a color printer for printing, an image input system or Noise is mixed in image data in the image transmission system. This type of noise is generally removed by image processing within the apparatus. Of these image input / output devices, a conventional method for removing noise mixed in a digital camera will be described.
The simplest and most general method for removing noise is to form a processing window consisting of a plurality of pixels centered on a pixel to be image processed (hereinafter referred to as a pixel of interest), and signals of peripheral pixels in the processing window. There is a technique of applying a low-pass filter by weighting the level value and the signal level value of the pixel of interest and performing a convolution operation. However, when this method is used, there is a problem that the resolution of the image is lowered because a low-pass filter is uniformly applied to significant edges existing in an image other than noise.
As another method, the edge of the processing window is detected by applying an operator such as Prewitt or Sobel, and if it is determined that the pixel of interest is a significant edge in the image, the strength of the low-pass filter is reduced. Alternatively, a technique has been proposed in which noise is removed while suppressing a decrease in image resolution by applying a low-pass filter with a direction that avoids pixels constituting edges existing in the vicinity (see, for example, Patent Document 1). ).
上記特許文献1に記載のノイズを除去する画像処理の方法は、特定方向に連続するノイズをエッジとして誤判定したり、被写体中に存在する模様をエッジとして検出できずにノイズと誤判定することがあるため、エッジとノイズを100%分離することができず、解像度の低下を引き起こし、またノイズリダクションを十分に行えないという問題がある。
The image processing method for removing noise described in
この発明は、上記問題点を解決するためになされたもので、解像度を低下させることなくノイズリダクションを行うことを可能にする画像処理装置および画像処理プログラムを得ることを目的とする。 The present invention has been made to solve the above-described problems, and an object thereof is to obtain an image processing apparatus and an image processing program that enable noise reduction without reducing the resolution.
この発明に係る画像処理装置は、入力された2次元画像の注目画素を中心とした複数画素からなる処理ウィンドウに対して、注目画素を含むそれぞれが異なる1次元方向のローパスフィルタ値を算出する複数の1次元ローパスフィルタと、前記処理ウィンドウに対して、注目画素を含む2次元方向のローパスフィルタ値を算出する2次元ローパスフィルタと、各1次元方向のローパスフィルタ値と注目画素値の差分の絶対値をそれぞれ算出し、各差分の絶対値の最小値を注目画素のエッジレベルとして検出するエッジレベル検出手段と、予め設定したエッジ補正曲線に基づいて、検出エッジレベルに対応するエッジ補正係数を算出するNR係数算出手段と、エッジ補正係数を用いて注目画素値と2次元方向のローパスフィルタ値を重み付け加算するNR処理手段を備えたものである。 The image processing apparatus according to the present invention calculates a plurality of low-pass filter values in different one-dimensional directions, each including a target pixel, for a processing window composed of a plurality of pixels centered on the target pixel of an input two-dimensional image. A one-dimensional low-pass filter, a two-dimensional low-pass filter for calculating a low-pass filter value in a two-dimensional direction including the target pixel with respect to the processing window, and an absolute difference between the low-pass filter value in each one-dimensional direction and the target pixel value Calculate the edge correction coefficient corresponding to the detected edge level based on the edge level detection means that calculates each value and detects the minimum value of the absolute value of each difference as the edge level of the pixel of interest and the preset edge correction curve NR coefficient calculating means for performing weighting and adding the target pixel value and the two-dimensional low-pass filter value using the edge correction coefficient Those having a NR processing means for.
この発明によれば、本来のエッジレベルとノイズを分別せずにエッジレベルを調整できるように構成したため、解像度を低下させることなくノイズリダクションを行うことが可能となり、高画質の画像を得ることができる効果がある。 According to the present invention, since the edge level can be adjusted without separating the original edge level and noise, noise reduction can be performed without lowering the resolution, and a high-quality image can be obtained. There is an effect that can be done.
実施の形態1.
図1は、この発明の実施の形態1による画像処理装置の機能構成を示すブロック図である。
図において、画像処理装置は、0度方向ローパスフィルタ(以下、ローパスフィルタをLPFと称す)11、45度方向LPF12、90度方向LPF13、135度方向LPF14からなる複数の1次元ローパスフィルタと、2次元LPF15と、エッジレベル検出部20と、NR係数算出部21と、NR処理部22を基本構成として備えている。また、この実施の形態1の画像処理装置による処理は、コンピュータ(マイコンを含む)上で実行するプログラムとして構成することができるものである。
FIG. 1 is a block diagram showing a functional configuration of an image processing apparatus according to
In the figure, an image processing apparatus includes a plurality of one-dimensional low-pass filters including a 0-degree direction low-pass filter (hereinafter referred to as a low-pass filter) 11, a 45-
次に、動作について説明する。
1画面を構成する画像を水平M画素(例、17画素)、垂直N画素(例、17画素)からなる画素構成の複数の処理ウィンドウに分け、画像処理装置は、順次入力される処理ウィンドウ毎に以下の処理を行うものとする。
1次元LPF11〜14は、入力画像データの注目画素を中心とし、水平17画素、垂直17画素からなる画素構成の処理ウィンドウに対して、それぞれ異なる1次元方向(0度、45度、90度、135度)のLPF値を算出する。
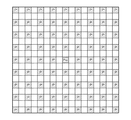
図2は、処理ウィンドウに対して0度方向にフィルタ処理を行う方法について示す。中心にある画素は注目画素Pxyである。0度方向LPF11では、注目画素Pxyを含む0度方向にある画素に対して処理を行う。図2で水平方向に斜線を施した画素が処理対象になる。また、ここでは、処理を行う入力画像は、一般的な単板カラーデジタルカメラから入力された画像を想定しており、ベイヤー配列のうちR、Gr、Gb、Bの4色の撮影色のうち同色のみを処理する場合の例について示している。同様に、図3は45度方向LPF12、図4は90度方向LPF13、図5は135度方向LPF14によるフィルタ処理の方法を示している。各1次元LPFでは、例えば注目画素を含む1次元方向の画素群の単純平均を算出することで、各方向の平均画素値、lpf000、lpf045、lpf090、lpf135を1次元方向のLPF値としてそれぞれ算出する。
Next, the operation will be described.
An image constituting one screen is divided into a plurality of processing windows each having a pixel configuration including horizontal M pixels (for example, 17 pixels) and vertical N pixels (for example, 17 pixels). The following processing is performed.
The one-
FIG. 2 shows a method for performing filtering in the 0 degree direction with respect to the processing window. The pixel at the center is the target pixel Pxy. In the 0
また、2次元LPF15により、同タイミングの入力画像データの処理ウィンドウに対して2次元方向のLPF値を算出する。
図6は、処理ウィンドウに対するLPF演算の処理方法について示している。ここでは、2次元方向のLPF値として、17画素×17画素からなる処理ウィンドウ内の全ての平均値lpf17を(1)式に従って算出する。

FIG. 6 shows an LPF calculation processing method for the processing window. Here, as the LPF value in the two-dimensional direction, all average values lpf17 in the processing window composed of 17 pixels × 17 pixels are calculated according to the equation (1).
次に、エッジレベル検出部20では、1次元LPF11〜14によりそれぞれ算出された1次元方向のLPF値lpf000〜lpf135と入力画像データの注目画素の信号レベルPxyの差分の絶対値をそれぞれ算出し、その中で最小となる差分絶対値lpfminを注目画素のエッジレベルとして検出する。
Next, the edge
NR係数算出部21では、予め設定されたエッジ補正曲線に基づいて、エッジレベル検出部20で検出されたエッジレベルに対応するエッジ補正係数を算出する。
エッジ補正曲線は、図7に例示するように、検出エッジレベルに応じてエッジ補正係数が変化する特性を規定している。この例では、エッジ補正係数のレンジを0〜64までの65段階で定義し、検出されたエッジレベルlpfminが大きいほどエッジ補正の度合いを大きくし、検出エッジレベルlpfminが小さいほど補正を弱める特性を示している。したがって、注目画素におけるエッジレベルに応じてエッジ補正係数dx1が一意に決まる。また、図7では、補正特性を定義するためのDMINX、DMAXX、DMINY、DMAXYは予め与えられており、エッジ補正曲線は画像入力装置における撮影条件に応じて予め規定しておく。
さらに、NR係数算出部21では、エッジ補正曲線からエッジ補正係数dx1を算出すると、これと対になるエッジ補正係数dx2を(2)式によって算出する。
dx2=64−dx1 (2)
これらのエッジ補正係数dx1、dx2は、後段のNR処理部22でノイズリダクションを行うために使用されるNR係数となる。
The NR
As illustrated in FIG. 7, the edge correction curve defines the characteristic that the edge correction coefficient changes according to the detected edge level. In this example, the range of the edge correction coefficient is defined in 65 levels from 0 to 64, and the degree of edge correction is increased as the detected edge level lpfmin is increased, and the correction is weakened as the detected edge level lpfmin is decreased. Show. Therefore, the edge correction coefficient dx1 is uniquely determined according to the edge level in the target pixel. In FIG. 7, DMINX, DMAXX, DMINY, and DMAXY for defining correction characteristics are given in advance, and an edge correction curve is defined in advance according to shooting conditions in the image input apparatus.
Furthermore, when the edge correction coefficient dx1 is calculated from the edge correction curve, the NR
dx2 = 64−dx1 (2)
These edge correction coefficients dx1 and dx2 are NR coefficients used for noise reduction in the subsequent
NR処理部22では、NR係数算出部21で算出されたエッジ補正係数を用いて入力画像データの注目画素値と2次元方向のLPF値を重み付けして加算する。
ここでは、2次元方向のLPF値lpf17をエッジ補正係数dx1係数で重み付けし、また、注目画素値Pxyをエッジ補正係数dx2で重み付けする。そして、両者を(3)式に従って加算することでノイズリダクション処理を行い、ノイズ補正後の画素値Pxy’を得る。
Pxy’=(dx1×lpf17+dx2×Pxy)/64 (3)
上記一連の処理は、処理ウィンドウのR、Gr、Gb、Bの4色の撮影色のうち同色のみについて説明してきたが、他の各色に対しても同様に行う。また、1画面を構成する処理ウィンドウの全てに対して同様な処理を行う。
以上のようにノイズリダクション処理を行うことにより、解像度を損なうことなく画面全体のノイズレベルの均一化が図れるため、高画質なノイズリダクション効果が得られる。
In the
Here, the LPF value lpf17 in the two-dimensional direction is weighted with the edge correction coefficient dx1 coefficient, and the target pixel value Pxy is weighted with the edge correction coefficient dx2. Then, noise reduction processing is performed by adding both in accordance with equation (3) to obtain a pixel value Pxy ′ after noise correction.
Pxy ′ = (dx1 × lpf17 + dx2 × Pxy) / 64 (3)
The above-described series of processing has been described for only the same color among the four shooting colors R, Gr, Gb, and B in the processing window, but the same processing is performed for each of the other colors. In addition, the same processing is performed on all processing windows constituting one screen.
By performing the noise reduction process as described above, the noise level of the entire screen can be made uniform without degrading the resolution, so that a high-quality noise reduction effect can be obtained.
図8は、上記ノイズリダクション処理の前後の画像信号を示す説明図である。
図8(a)は、この発明を適用する画像入力装置に入力される画像信号を、説明上1次元信号として示した例である。図において、破線で記載した信号は本来被写体が持つ信号レベルの変化を示しているが、画像入力装置のアナログ回路で混入したノイズの影響で実線のような信号として入力されている。図8(b)は、図8(a)の信号に対して図7の補正特性を用いてノイズリダクション処理を行った後の画像信号例を示す。このことから、ノイズ信号が良好に抑圧され、かつ本来画像内に含まれるエッジが保持されていることが確認できる。これは、エッジレベル検出部20において0度〜135度の1次元方向のLPF値と注目画素の差分絶対値を算出し、その最小値を注目画素のエッジレベルとすることで、画像に本来存在するエッジについては、エッジの稜線方向のLPFが差分絶対値の対象として選択され、その差分値を超えるエッジ補正がかからないためである。
FIG. 8 is an explanatory diagram showing image signals before and after the noise reduction process.
FIG. 8A shows an example in which an image signal input to an image input apparatus to which the present invention is applied is shown as a one-dimensional signal for explanation. In the figure, the signal indicated by a broken line indicates a change in the signal level inherent to the subject, but is input as a solid line signal due to the influence of noise mixed in the analog circuit of the image input apparatus. FIG. 8B shows an example of an image signal after the noise reduction processing is performed on the signal of FIG. 8A using the correction characteristics of FIG. From this, it can be confirmed that the noise signal is satisfactorily suppressed and the edges originally included in the image are retained. This is because the edge
以上のように、この実施の形態1によれば、注目画素を中心とした複数画素からなる処理ウィンドウに対して、注目画素を含むそれぞれ異なる1次元方向の複数のLPF値を算出すると共に、上記処理ウィンドウに対して、注目画素を含む2次元方向のLPF値を算出し、各1次元方向のLPF値と注目画素値の差分の絶対値をそれぞれ算出して各差分の絶対値の最小値を注目画素のエッジレベルとして検出し、予め設定したエッジ補正曲線に基づいて、検出エッジレベルに対応するエッジ補正係数を算出し、算出したエッジ補正係数を用いて注目画素値と2次元方向のLPF値を重み付け加算することでノイズリダクションを行うようにしている。したがって、本来のエッジレベルとノイズを分別せずにエッジレベルを調整できるように構成したため、解像度を低下させることなくノイズリダクションを行うことが可能となり、高画質の画像を得ることができる。また、注目画素のエッジレベルの検出は、画像中に本来存在するエッジと撮像系で付加されたノイズを区別することなくレベル抑圧を行う構成にしたため、Sobelフィルタなどを用いて画像中のエッジとノイズを区別してノイズのみにノイズリダクションを行う構成に比べて、均一な粒状感、かつノイズレベルが低い画像を出力することが可能になるという効果が得られる。 As described above, according to the first embodiment, a plurality of LPF values in different one-dimensional directions including a target pixel are calculated for a processing window including a plurality of pixels centered on the target pixel. The LPF value in the two-dimensional direction including the target pixel is calculated for the processing window, the absolute value of the difference between the LPF value in each one-dimensional direction and the target pixel value is calculated, and the minimum absolute value of each difference is calculated. Detected as the edge level of the target pixel, calculates an edge correction coefficient corresponding to the detected edge level based on a preset edge correction curve, and uses the calculated edge correction coefficient to calculate the target pixel value and the LPF value in the two-dimensional direction The noise reduction is performed by weighted addition. Therefore, since the edge level can be adjusted without separating the original edge level and noise, noise reduction can be performed without reducing the resolution, and a high-quality image can be obtained. In addition, the detection of the edge level of the pixel of interest is configured to perform level suppression without distinguishing between the edge originally present in the image and the noise added by the imaging system, so the edge level in the image is detected using a Sobel filter or the like. Compared to a configuration in which noise is differentiated and noise reduction is performed only on noise, an effect of enabling output of an image having a uniform graininess and a low noise level can be obtained.
なお、上記例では、単板カラーセンサを使用して撮影した画像に対しエッジ補正係数を全撮影色に対して一律なエッジ補正曲線を用いて算出する例について示したが、この限りでなく、入力画像の色成分毎にイメージセンサの特性に合わせて感度が異なる曲線を用いる構成としてもよい。これにより、全ての色成分に対して均一なノイズリダクション処理を行える効果がある。
また、上記例では、各1次元方向のLPF値算出時および処理ウィンドウ内の全ての画素の平均値LPFを算出する際に、演算対象の全画素を使用する構成を示したが、この限りでなく、注目画素と比較的近い信号レベルを持つ(すなわち、所定のレベル差内にある)画素値のみを選択して演算対象画素として使用する構成にしてもよい。これにより、注目画素と明らかに特徴が異なる領域が処理ウィンドウ内に含まれていた場合に、異なる領域の特徴を排除した演算が可能になり、より高解像度なノイズリダクションが可能になる。
In the above example, an example in which the edge correction coefficient is calculated using an edge correction curve that is uniform for all shooting colors for an image shot using a single-plate color sensor is not limited thereto. A configuration in which curves having different sensitivities in accordance with the characteristics of the image sensor may be used for each color component of the input image. As a result, there is an effect that uniform noise reduction processing can be performed for all color components.
In the above example, the configuration is shown in which all pixels to be calculated are used when calculating the LPF value in each one-dimensional direction and when calculating the average value LPF of all the pixels in the processing window. Instead, only a pixel value having a signal level that is relatively close to the target pixel (that is, within a predetermined level difference) may be selected and used as the calculation target pixel. As a result, when a region that clearly differs from the pixel of interest in the processing window is included in the processing window, it is possible to perform an operation that excludes the feature of the different region, and noise reduction with higher resolution becomes possible.
また、上記例では、エッジレベル検出部20でエッジレベルを検出する際、各1次元方向のLPF値と注目画素の差分絶対値が最小のものをエッジレベルと定義したが、この限りでなく、0度方向から135度方向のLPF値に対して最小のもの(エッジ方向の候補)と最大のものを用いて、最大のものが最小のものと直交方向であった場合に最小のものを真のエッジ方向と判定するなど、複数のエッジ方向からエッジレベルを検出するように構成してもよい。この場合、ランダムノイズの影響で誤った方向のエッジレベル絶対値が選択されることが減少し、より正確なエッジレベルを算出することが可能になる。
また、上記例では、NR係数算出部21で算出するエッジ補正係数を65段階で算出する方法について記載したが、この限りでなく、入力画像のビット幅等の要因によって任意の段階で算出してもよい。
In the above example, when the edge level is detected by the edge
In the above example, the method of calculating the edge correction coefficient calculated by the NR
また、上記例では、各1次元方向のLPF値および2次元方向のLPF値は演算対象画素の単純平均値として算出することを例としたが、この限りでなく、注目画素と演算対象画素の距離に応じて重み付け平均を用いるように構成してもよい。これによって、注目画素に近い画素の特徴量を重んじた算出が可能になり、特に比較的ノイズが少ない条件で、より正確なエッジレベル検出が可能になる。
また、上記例では、エッジ補正係数に基づいてNR処理部22で注目画素値Pxyと2次元方向のLPF値lpf17の重み付け加算を行う例を示したが、この限りでなく、lpf17の代わりにlpfminを規定する方向のLPF値(lpf000〜lpf135のいずれか)を用いる構成にしてもよい。この場合はlpf17を用いる場合に比べて狭い範囲での重み付け加算になるため、入力画像に比較的ノイズが少ない場合に特に解像度を完全に維持可能にする点で有効である。
In the above example, the LPF value in each one-dimensional direction and the LPF value in the two-dimensional direction are calculated as a simple average value of the calculation target pixel. You may comprise so that a weighted average may be used according to distance. As a result, it is possible to perform calculation with respect to the feature amount of the pixel close to the target pixel, and it is possible to detect the edge level more accurately particularly under the condition of relatively little noise.
In the above example, the
また、上記例では、2次元方向のLPF値を求めるための(1)式による平均値算出処理において、17×17画素からなる処理ウィンドウ内の同色画素について演算する方法を記載したが、この限りでなく、実現する装置コストや入力される画像信号のS/N比などに基づいて他のウィンドウサイズを用いてもよい。また、この場合、(1)式の分母が2のべき乗になるような画素数の選択を行うことで、除算器を削減するようにしてもよい。
また、上記例では、(3)式を用いたNR処理において除算を用いる場合の説明を行ったがこの限りでなく、重み付け加算の段階数が2のべき乗の場合は除算をビットシフト演算で実現することで、回路化した場合は除算器が排除可能で、一方、プログラムで実現する場合は演算の実行速度の向上が可能になる。
Further, in the above example, in the average value calculation process according to the equation (1) for obtaining the LPF value in the two-dimensional direction, a method for calculating the same color pixels in the processing window composed of 17 × 17 pixels is described. Instead, other window sizes may be used based on the realized device cost, the S / N ratio of the input image signal, and the like. In this case, the number of dividers may be reduced by selecting the number of pixels so that the denominator of equation (1) is a power of 2.
In the above example, the case where division is used in the NR processing using equation (3) has been described. However, this is not limited to this, and division is realized by bit shift operation when the number of stages of weighted addition is a power of 2. Thus, the divider can be eliminated when the circuit is realized, while the execution speed of the operation can be improved when the circuit is realized by a program.
実施の形態2.
図9は、この発明の実施の形態2による画像処理装置の機能構成を示すブロック図である。図において、図1に相当する部分には同一符号を付し、原則としてその説明は省略する。この実施の形態2は、2次元LPF15とNR係数算出部21の間に明るさ補正部21を設けた点で実施の形態1と異なる。
次に、動作について説明する。
明るさ補正部23では、予め設定された明度補正曲線に基づいて、2次元LPF15の2次元方向のLPF値に対応する明度補正係数を算出する。ここで、明度補正曲線としては、例えば図10に示すような曲線を用いる。この例では、暗部補正の段階を129段階とし64の場合を明るさ補正なしと定義している。NR1HXとNR1HYは補正曲線を定義するために予め設定した制御点である。特に図10の明度補正曲線の場合、画像の暗部でのエッジ補正係数を弱めることができる。この補正曲線を用いて明るさ補正を行う場合、2次元方向のLPF値を注目画素周辺の明るさとして、明度補正係数hyを求める。
FIG. 9 is a block diagram showing a functional configuration of an image processing apparatus according to
Next, the operation will be described.
The
NR係数算出部21では、実施の形態1で説明したように、エッジレベル検出部20で検出されたエッジレベルに対するエッジ補正係数を算出しているが、このエッジ補正係数を、明るさ補正部23で算出した明度補正係数に基づいて補正する。ここでは、エッジ補正係数dx1に対して明度補正係数を適用した(4)式により、明度補正後のエッジ補正係数dx1’を算出し、(2)式によりdx2’を算出する。
dx1’=dx1×hy/64 (4)
このように明度補正されたエッジ補正係数dx1’、dx2’は、明度補正係数hyに応じて、すなわち画像領域の明暗に応じて可変することができる。
As described in the first embodiment, the NR
dx1 ′ = dx1 × hy / 64 (4)
The edge correction coefficients dx1 ′ and dx2 ′ thus corrected for brightness can be varied according to the brightness correction coefficient hy, that is, according to the brightness of the image area.
以上のように、この実施の形態2によれば、実施の形態1の構成に対して明るさ補正部23を加えることで、画像中の明部や暗部のエッジ補正レベルを可変にすることが可能になり、例えば入力画像の明るい領域に合わせてNR係数を調整した場合に信号レベルの低い暗部がぼけてしまうなど、入力画像の明るさに起因する補正ムラを緩和させることが可能になる。
As described above, according to the second embodiment, by adding the
なお、この実施の形態2の例では、明るさ補正を129段階で切り替え可能にする構成を示したが、この限りでなく、入力画像や装置の画像特性に応じて任意の段階で切り替え可能にするようにしてもよい。また、(4)式では除算を用いて明るさ補正を行うようにしたが、この限りでなく、明るさ補正の段階数を2のべき乗にしてもよい。その場合は、ビットシフト演算で置き換えることが可能になり、回路化する場合は除算器を削減できるため回路規模の簡略化が可能になり、また、プログラム処理で行う場合は処理速度の高速化を可能にする。
また、この実施の形態2の例では、単板カラーセンサを使用して撮影した画像に対し明るさ補正を全撮影色に対して一律に行う例について示したが、この限りでなく、色成分毎に感度が異なるイメージセンサの特性に合わせて明度補正係数を色毎に定義する構成としてもよい。これにより、全ての色成分に対して均一なノイズリダクション処理を行えるという効果がある。
In the example of the second embodiment, the configuration in which the brightness correction can be switched in 129 stages is shown. However, the present invention is not limited to this, and the brightness correction can be switched in any stage according to the input image and the image characteristics of the apparatus. You may make it do. Further, although brightness correction is performed using division in the equation (4), this is not restrictive, and the number of brightness correction steps may be raised to a power of two. In that case, it is possible to replace it with a bit shift operation, and in the case of circuitization, the number of dividers can be reduced, so the circuit scale can be simplified, and in the case of program processing, the processing speed can be increased. enable.
Further, in the example of the second embodiment, the example in which the brightness correction is uniformly performed for all the photographed colors with respect to the image photographed using the single plate color sensor is shown, but this is not the only case. The brightness correction coefficient may be defined for each color according to the characteristics of the image sensor having different sensitivities. Thereby, there is an effect that uniform noise reduction processing can be performed for all color components.
11〜14 1次元LPF(ローパスフィルタ)、15 2次元LPF(ローパスフィルタ)、20 エッジレベル検出部、21 NR係数算出部、22 NR処理部、23 明るさ補正部。 11-14 One-dimensional LPF (low-pass filter), 15 Two-dimensional LPF (low-pass filter), 20 Edge level detection unit, 21 NR coefficient calculation unit, 22 NR processing unit, 23 Brightness correction unit.
Claims (7)
前記処理ウィンドウに対して、注目画素を含む2次元方向のローパスフィルタ値を算出する2次元ローパスフィルタと、
各1次元方向のローパスフィルタ値と注目画素値の差分の絶対値をそれぞれ算出し、各差分の絶対値の最小値を注目画素のエッジレベルとして検出するエッジレベル検出手段と、
予め設定したエッジ補正曲線に基づいて、検出エッジレベルに対応するエッジ補正係数を算出するNR係数算出手段と、
エッジ補正係数を用いて注目画素値と2次元方向のローパスフィルタ値を重み付け加算するNR処理手段を備えたことを特徴とする画像処理装置。 A plurality of one-dimensional low-pass filters for calculating a low-pass filter value in a different one-dimensional direction each including a target pixel for a processing window including a plurality of pixels centered on the target pixel of an input two-dimensional image;
A two-dimensional low-pass filter that calculates a low-pass filter value in a two-dimensional direction including the target pixel with respect to the processing window;
An edge level detecting means for calculating an absolute value of a difference between each low-pass filter value in one dimensional direction and a target pixel value, and detecting a minimum value of the absolute value of each difference as an edge level of the target pixel;
NR coefficient calculating means for calculating an edge correction coefficient corresponding to the detected edge level based on a preset edge correction curve;
An image processing apparatus comprising NR processing means for weighting and adding a target pixel value and a two-dimensional low-pass filter value using an edge correction coefficient.
NR係数算出手段は、エッジ補正係数を前記明度補正係数に基づいて補正し、
NR処理手段は、注目画素値と2次元方向のローパスフィルタ値を、前記明度補正されたエッジ補正係数を用いて重み付け加算することを特徴とする請求項1から請求項3のうちのいずれか1項記載の画像処理装置。 Brightness correction means for calculating a brightness correction coefficient corresponding to the low-pass filter value in the two-dimensional direction based on a preset brightness correction curve;
The NR coefficient calculating means corrects the edge correction coefficient based on the brightness correction coefficient,
The NR processing means weights and adds the target pixel value and the two-dimensional low-pass filter value using the edge correction coefficient whose brightness is corrected. The image processing apparatus according to item.
前記同じ処理ウィンドウに対して、注目画素を含む2次元方向のローパスフィルタ値を算出する処理と、
各1次元方向のローパスフィルタ値と注目画素値の差分の絶対値をそれぞれ算出し、各差分の絶対値の最小値を注目画素のエッジレベルとして検出する処理と、
予め設定したエッジ補正曲線に基づいて、検出エッジレベルに対応するエッジ補正係数を算出する処理と、
エッジ補正係数を用いて注目画素値と2次元方向のローパスフィルタ値を重み付け加算する処理とをコンピュータ上で実行する画像処理プログラム。 A process of calculating a plurality of low-pass filter values in different one-dimensional directions including the target pixel for a processing window including a plurality of pixels centered on the target pixel of the two-dimensional image;
A process of calculating a low-pass filter value in a two-dimensional direction including the target pixel for the same processing window;
A process of calculating an absolute value of a difference between each low-pass filter value in each one-dimensional direction and a target pixel value, and detecting a minimum value of the absolute value of each difference as an edge level of the target pixel;
A process of calculating an edge correction coefficient corresponding to the detected edge level based on a preset edge correction curve;
An image processing program for executing, on a computer, a process of weighting and adding a target pixel value and a two-dimensional low-pass filter value using an edge correction coefficient.
前記同じ処理ウィンドウに対して、注目画素を含む2次元方向のローパスフィルタ値を算出する処理と、
各1次元方向のローパスフィルタ値と注目画素値の差分の絶対値をそれぞれ算出し、各差分の絶対値の最小値を注目画素のエッジレベルとして検出する処理と、
予め設定したエッジ補正曲線に基づいて、検出エッジレベルに対応するエッジ補正係数を算出する処理と、
予め設定した明度補正曲線に基づいて2次元方向のローパスフィルタ値に対応する明度補正係数を算出する処理と、
エッジ補正係数を明度補正係数に基づいて補正する処理と、
前記明度補正されたエッジ補正係数を用いて注目画素値と2次元方向のローパスフィルタ値を重み付け加算する処理とをコンピュータ上で実行する画像処理プログラム。 A process of calculating a plurality of low-pass filter values in different one-dimensional directions including the target pixel for a processing window including a plurality of pixels centered on the target pixel of the two-dimensional image;
A process of calculating a low-pass filter value in a two-dimensional direction including the target pixel for the same processing window;
A process of calculating an absolute value of a difference between each low-pass filter value in each one-dimensional direction and a target pixel value, and detecting a minimum value of the absolute value of each difference as an edge level of the target pixel;
A process of calculating an edge correction coefficient corresponding to the detected edge level based on a preset edge correction curve;
A process for calculating a brightness correction coefficient corresponding to a low-pass filter value in a two-dimensional direction based on a preset brightness correction curve;
Processing for correcting the edge correction coefficient based on the lightness correction coefficient;
An image processing program for executing on a computer weighted addition of a target pixel value and a two-dimensional low-pass filter value using the brightness-corrected edge correction coefficient.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008203090A JP4990240B2 (en) | 2008-08-06 | 2008-08-06 | Image processing apparatus and image processing program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008203090A JP4990240B2 (en) | 2008-08-06 | 2008-08-06 | Image processing apparatus and image processing program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010039832A true JP2010039832A (en) | 2010-02-18 |
| JP4990240B2 JP4990240B2 (en) | 2012-08-01 |
Family
ID=42012298
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008203090A Expired - Fee Related JP4990240B2 (en) | 2008-08-06 | 2008-08-06 | Image processing apparatus and image processing program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4990240B2 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013150824A1 (en) * | 2012-04-04 | 2013-10-10 | 三菱電機株式会社 | Image processing device and method, and image processing program |
| US9007492B2 (en) | 2012-02-01 | 2015-04-14 | Panasonic Intellectual Property Management Co., Ltd. | Image processing device and imaging device |
| WO2020231065A1 (en) * | 2019-05-10 | 2020-11-19 | Samsung Electronics Co., Ltd. | Method and apparatus for combining image frames captured using different exposure settings into blended images |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0962836A (en) * | 1995-08-25 | 1997-03-07 | Ge Yokogawa Medical Syst Ltd | Picture processing method and picture processor |
| JP2002185795A (en) * | 2000-12-11 | 2002-06-28 | Seiko Epson Corp | Image processing method, computer-readable recording medium for recording image processing program and image processing unit |
| JP2007312304A (en) * | 2006-05-22 | 2007-11-29 | Fujitsu Ltd | Image processing apparatus and image processing method |
-
2008
- 2008-08-06 JP JP2008203090A patent/JP4990240B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0962836A (en) * | 1995-08-25 | 1997-03-07 | Ge Yokogawa Medical Syst Ltd | Picture processing method and picture processor |
| JP2002185795A (en) * | 2000-12-11 | 2002-06-28 | Seiko Epson Corp | Image processing method, computer-readable recording medium for recording image processing program and image processing unit |
| JP2007312304A (en) * | 2006-05-22 | 2007-11-29 | Fujitsu Ltd | Image processing apparatus and image processing method |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9007492B2 (en) | 2012-02-01 | 2015-04-14 | Panasonic Intellectual Property Management Co., Ltd. | Image processing device and imaging device |
| WO2013150824A1 (en) * | 2012-04-04 | 2013-10-10 | 三菱電機株式会社 | Image processing device and method, and image processing program |
| JPWO2013150824A1 (en) * | 2012-04-04 | 2015-12-17 | 三菱電機株式会社 | Image processing apparatus and method, and image processing program |
| US9258461B2 (en) | 2012-04-04 | 2016-02-09 | Mitsubishi Electric Corporation | Image processing device and method, and image processing program |
| WO2020231065A1 (en) * | 2019-05-10 | 2020-11-19 | Samsung Electronics Co., Ltd. | Method and apparatus for combining image frames captured using different exposure settings into blended images |
| US11062436B2 (en) | 2019-05-10 | 2021-07-13 | Samsung Electronics Co., Ltd. | Techniques for combining image frames captured using different exposure settings into blended images |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4990240B2 (en) | 2012-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10636126B2 (en) | Image processing device, imaging apparatus, image processing method, image processing program, and recording medium | |
| US9445022B2 (en) | Image processing apparatus and image processing method, and program | |
| US8208046B2 (en) | Method of detecting defect in image pickup apparatus and the image pickup apparatus | |
| EP1746846B1 (en) | Image processing device having color shift-correcting function, image processing program, and electronic camera | |
| JP4054184B2 (en) | Defective pixel correction device | |
| US8792746B2 (en) | Image processing apparatus, image processing method, and program | |
| US8000549B2 (en) | Digital image processing apparatus and method for the same | |
| US20110285871A1 (en) | Image processing apparatus, image processing method, and computer-readable medium | |
| JP5060447B2 (en) | Noise cancellation processing circuit and solid-state imaging device | |
| KR100780242B1 (en) | Method and apparatus for removing noise in dark area of image | |
| EP2742681B1 (en) | Image processing apparatus and control method therefor | |
| EP1480449A2 (en) | Adaptive coring for video peaking | |
| TWI544785B (en) | Image downsampling apparatus and method | |
| JP2007041834A (en) | Image processor | |
| JP4990240B2 (en) | Image processing apparatus and image processing program | |
| JP4380399B2 (en) | Imaging apparatus, noise reduction apparatus, noise reduction method, and program | |
| EP2835963B1 (en) | Image processing device and method, and image processing program | |
| KR100627615B1 (en) | Apparatus for removing color interpolation by using adjustable threshold | |
| KR20130021977A (en) | Device for correcting a difference of gr and gb sensitivity in image sensor and method thereof | |
| JP3959547B2 (en) | Image processing apparatus, image processing method, and information terminal apparatus | |
| JP2016208343A (en) | Image processing system, control method of the same, control program, and imaging apparatus | |
| JP6184277B2 (en) | Image processing device | |
| KR100776385B1 (en) | Color interpolation apparatus for edge enhancement and noise removal | |
| KR100769561B1 (en) | Apparatus and method for setting up threshold used for noise removal | |
| JP2015216521A (en) | Color information compensation device and program therefor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120403 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120501 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4990240 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150511 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |