JP2007264712A - Lane detector - Google Patents
Lane detector Download PDFInfo
- Publication number
- JP2007264712A JP2007264712A JP2006085142A JP2006085142A JP2007264712A JP 2007264712 A JP2007264712 A JP 2007264712A JP 2006085142 A JP2006085142 A JP 2006085142A JP 2006085142 A JP2006085142 A JP 2006085142A JP 2007264712 A JP2007264712 A JP 2007264712A
- Authority
- JP
- Japan
- Prior art keywords
- lane
- detection
- detected
- distance
- host vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Abstract
Description
本発明は、車線検出装置に係り、特に、車両前方の撮像画像中から車線を検出する車線検出装置に関する。 The present invention relates to a lane detection device, and more particularly to a lane detection device that detects a lane from a captured image in front of a vehicle.
近年、自動車等の走行安全性の向上や車両の自動制御等に向けて、車載のステレオカメラやビデオカメラ等で撮像した画像に画像処理を施して安全性向上や自動制御等の前提となる道路形状を認識するための道路認識装置の開発が進められている。道路形状を的確に認識を精度よく行うためには、自車両前方の道路を含む風景を撮像した画像中から自車両の左右に標示されている車線の位置を確実に検出することが必要となる(例えば、特許文献1、2等参照)。 In recent years, roads that have been premised on improving safety and automatic control by applying image processing to images taken with in-vehicle stereo cameras and video cameras, etc., in order to improve driving safety of automobiles and automatic control of vehicles, etc. Development of a road recognition device for recognizing a shape is in progress. In order to accurately recognize the road shape accurately, it is necessary to reliably detect the positions of the lanes marked on the left and right of the host vehicle from an image obtained by capturing a landscape including the road ahead of the host vehicle. (For example, see Patent Documents 1 and 2).
これらの装置では、自車両の左右の車線位置を検出するために、撮像画像の各画素の輝度値や輝度微分値に着目し、その変化から車線のエッジ部分を検出し、そのエッジ部分に基づいて車線位置を検出するように構成されることが多い。 In these devices, in order to detect the left and right lane positions of the host vehicle, attention is paid to the luminance value and the luminance differential value of each pixel of the captured image, and the edge portion of the lane is detected from the change, and based on the edge portion. Often configured to detect lane position.
なお、本発明では、追い越し禁止線等の車道中央線や車両通行帯境界線、路側帯と車道とを区画する区画線等の道路面上に標示された連続線や破線を車線といい、車線自体の幅を車線幅という。
しかしながら、単に撮像画像の各画素の輝度値等のみに基づいて車線位置を検出すると、図26に示すように、特に横断歩道が撮像されている画像では横断歩道のゼブラ模様のペイント部分を車線と誤検出し、自車両の左右の車線位置LR、LLを誤って検出してしまうことがある。 However, if the lane position is detected based only on the luminance value of each pixel of the captured image, as shown in FIG. 26, the zebra pattern paint portion of the pedestrian crossing is defined as the lane especially in the image in which the pedestrian crossing is imaged. Incorrect detection may result in erroneous detection of the left and right lane positions LR and LL of the host vehicle.
このような事態を回避するために、例えば、車線幅の規格が10〜15cmとされている通常の1本の車線と、幅の規格が45〜50cmとされている横断歩道のゼブラ模様のペイント部分のような幅広の標示とを閾値を設けて区別する方法が考えられる。このように車線幅についての閾値を設ければ、検出したエッジ部分に対応する車線部分の車線幅が閾値より大きい幅広の標示についてはそのエッジ部分を検出の対象から除外することができる。 In order to avoid such a situation, for example, a normal lane with a lane width standard of 10 to 15 cm and a zebra pattern paint on a pedestrian crossing with a width standard of 45 to 50 cm A method of distinguishing a wide sign such as a part by providing a threshold value can be considered. Thus, if the threshold value about the lane width is provided, the edge portion of the wide lane mark whose lane width corresponding to the detected edge portion is larger than the threshold value can be excluded from the detection target.
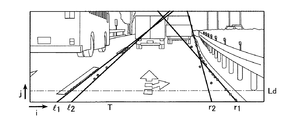
しかし、このように幅広の標示を除外するように閾値を設定すると、今度は例えば図27に示すように、黄色や白色の3本の車線が並列に標示された車線幅が45cm程度の幅広の車道中央線を表す車線TLを検出することができなくなり、同図の場合には右車線位置が特定できなくなる。また、後述する図22に示すような高速道路の合流地点等に標示された幅が同程度の太い破線状の標示BLも検出できなくなる。 However, when the threshold value is set so as to exclude the wide sign in this way, this time, as shown in FIG. 27, for example, the lane width in which three lanes of yellow and white are marked in parallel is about 45 cm wide. The lane TL representing the roadway center line cannot be detected, and the right lane position cannot be specified in the case of FIG. Further, it is impossible to detect a thick broken-line marking BL having the same width as that shown at a junction of an expressway as shown in FIG.
このように、単に車線幅について閾値を設けるだけでは検出すべき幅広の車線や太い標示を検出できなくなり、自車両の左右の車線位置を特定できなくなる。 Thus, simply setting a threshold value for the lane width makes it impossible to detect a wide lane or a thick sign to be detected, and the left and right lane positions of the host vehicle cannot be specified.
本発明は、このような事情に鑑みてなされたものであり、横断歩道のような車線位置検出に不要な幅広の標示は適切に排除し、必要な幅広の車線や標示は検出して的確に車線位置を検出することが可能な車線検出装置を提供することを目的とする。 The present invention has been made in view of such circumstances, and appropriately eliminates wide signs unnecessary for lane position detection such as pedestrian crossings, and detects necessary wide lanes and signs accurately. An object of the present invention is to provide a lane detection device capable of detecting a lane position.
前記の問題を解決するために、第1の発明は、
車線検出装置において、
自車両前方の道路を含む風景を撮像して画素ごとに輝度値を有する一対の画像を出力する撮像手段と、
前記撮像された一対の画像に基づいて少なくとも一方の画像の各画素について実空間における距離を算出する画像処理手段と、
前記一方の画像について前記輝度値および前記距離に基づいて車線の一方のエッジ部分に対応する画素を車線候補点として検出し、検出した車線候補点に基づいて車線位置を検出する検出手段と
を備え、
前記検出手段は、前記車線候補点とそれに対応する車線の反対側のエッジ部分との実空間上の距離を算出し、前記距離が検出車線幅閾値以下の場合にのみ前記検出した車線候補点を前記車線位置の検出に用い、
かつ、前記検出車線幅閾値は、自車両の走行環境または道路環境により可変とされていることを特徴とする。
In order to solve the above problem, the first invention provides:
In the lane detector,
Imaging means for imaging a landscape including a road ahead of the host vehicle and outputting a pair of images having a luminance value for each pixel;
Image processing means for calculating a distance in real space for each pixel of at least one image based on the pair of captured images;
Detecting means for detecting a pixel corresponding to one edge portion of the lane as a lane candidate point based on the luminance value and the distance for the one image, and detecting a lane position based on the detected lane candidate point; ,
The detection means calculates a distance in real space between the lane candidate point and an edge portion on the opposite side of the lane corresponding to the lane candidate point, and the detected lane candidate point is detected only when the distance is equal to or smaller than a detected lane width threshold. Used to detect the lane position,
In addition, the detected lane width threshold value is variable depending on a traveling environment or a road environment of the host vehicle.
第2の発明は、第1の発明の車線検出装置において、前記検出手段は、1本の車線幅の規格より幅広の標示を検出した場合には、前記検出車線幅閾値を、前記幅広の標示を検出可能な値に拡大することを特徴とする。 According to a second aspect of the present invention, in the lane detection device according to the first aspect of the present invention, when the detection means detects a sign wider than the standard of one lane width, the detected lane width threshold is set to the wide sign. Is expanded to a detectable value.
第3の発明は、第2の発明の車線検出装置において、前記検出手段は、車線候補点の探索を行う前記一方の画像のうち、自車両前方の所定距離または前記所定距離より自車両に近い探索領域においては前記検出車線幅閾値を前記1本の車線幅の規格に対応する値に設定し、自車両前方の前記所定距離より遠い探索領域においては前記検出車線幅閾値を拡大された値に設定することを特徴とする。 According to a third aspect of the present invention, in the lane detection device according to the second aspect of the invention, the detection means is a predetermined distance ahead of the host vehicle or closer to the host vehicle than the predetermined distance in the one image for searching for lane candidate points. In the search area, the detected lane width threshold is set to a value corresponding to the standard of one lane width, and in the search area far from the predetermined distance ahead of the host vehicle, the detected lane width threshold is set to an enlarged value. It is characterized by setting.
第4の発明は、第3の発明の車線検出装置において、前記検出手段は、前記所定距離を自車両の走行距離に応じて短縮することを特徴とする。 According to a fourth aspect of the present invention, in the lane detection device according to the third aspect, the detection unit shortens the predetermined distance according to a travel distance of the host vehicle.
第5の発明は、第1から第4のいずれかの発明の車線検出装置において、
自車両が高速道路を走行中か否かを検出する高速道路走行検出手段を備え、
前記検出手段は、前記高速道路走行検出手段により自車両が高速道路を走行中であると検出された場合には、前記検出車線幅閾値を1本の車線幅の規格より幅広の標示を検出可能な値に拡大することを特徴とする。
A fifth aspect of the present invention is the lane detection device according to any one of the first to fourth aspects of the invention,
Highway running detection means for detecting whether or not the host vehicle is running on a highway,
The detecting means can detect a sign that is wider than the standard of one lane width for the detected lane width threshold when the highway running detecting means detects that the host vehicle is running on the highway. It is characterized by enlarging to various values.
第6の発明は、第5の発明の車線検出装置において、
自車両の前方に横断歩道があるか否かを検出する横断歩道検出手段と
を備え、
前記検出手段は、前記高速道路走行検出手段により自車両が高速道路を走行中であるとは検出されず、前記横断歩道検出手段により横断歩道が検出された場合には、前記検出車線幅閾値を前記1本の車線幅の規格に対応する値に設定することを特徴とする。
A sixth invention is the lane detection device of the fifth invention,
Pedestrian crossing detection means for detecting whether there is a pedestrian crossing in front of the vehicle,
The detection means does not detect that the host vehicle is traveling on an expressway by the expressway running detection means, and if the pedestrian crossing is detected by the pedestrian crossing detection means, the detection lane width threshold is set. It is set to a value corresponding to the standard of the one lane width.
第7の発明は、第6の発明の車線検出装置において、前記検出手段は、前記高速道路走行検出手段により自車両が高速道路を走行中であるとは検出されず、前記横断歩道検出手段により横断歩道が検出されなかった場合において、自車両の車速または自車両の左右の前記車線位置の間隔に基づいて自車両が高速道路を走行している可能性が高い場合には、前記検出車線幅閾値を1本の車線幅の規格より幅広の標示を検出可能な値に拡大することを特徴とする。 According to a seventh aspect of the present invention, in the lane detection device according to the sixth aspect of the present invention, the detection means is not detected by the highway travel detection means that the host vehicle is traveling on a highway, but is detected by the pedestrian crossing detection means. When a pedestrian crossing is not detected, if it is highly possible that the host vehicle is traveling on an expressway based on the speed of the host vehicle or the distance between the left and right lane positions of the host vehicle, the detected lane width The threshold value is expanded to a value that allows detection of a wider sign than the specification of one lane width.
第8の発明は、第1から第7のいずれかの発明の車線検出装置において、前記検出手段は、1本の車線幅の規格より幅広の標示を一定距離以上連続して検出した場合には、前記検出車線幅閾値を、前記幅広の標示を検出可能な値に拡大することを特徴とする。 According to an eighth aspect of the present invention, in the lane detection device according to any one of the first to seventh aspects, the detection means detects a sign that is wider than a standard of one lane width continuously for a certain distance or more. The detection lane width threshold value is expanded to a value capable of detecting the wide sign.
第9の発明は、第8の発明の車線検出装置において、前記一定距離は、自車両の進行方向における横断歩道の長さ以上の距離であることを特徴とする。 According to a ninth aspect of the present invention, in the lane detection device according to the eighth aspect of the invention, the fixed distance is a distance that is equal to or greater than the length of the pedestrian crossing in the traveling direction of the host vehicle.
第1の発明によれば、自車両が高速道路を走行している或いは走行している可能性が高い等の自車両の走行環境や、道路上に横断歩道が標示されている等の道路環境にあわせて検出車線幅閾値を拡大させたり縮小させたりして適切に設定することで、不要な標示は適切に排除し、必要な標示は的確に検出して車線候補点を検出することが可能となる。 According to the first invention, the traveling environment of the host vehicle such as the host vehicle traveling on the highway or having a high possibility of traveling, or the road environment such as a pedestrian crossing marked on the road By appropriately setting the detection lane width threshold to be enlarged or reduced according to the situation, unnecessary signs can be properly excluded, and necessary signs can be accurately detected to detect lane candidate points. It becomes.
そのため、自車両の左右の車線位置を的確に検出することが可能となる。また、通常の標準的な走行状態においては、車線幅の規格が10〜15cmとされている通常の1本の車線を検出するように、検出車線幅閾値を狭く設定することで、車線候補点の誤検出を防止することが可能となる。 Therefore, it is possible to accurately detect the left and right lane positions of the host vehicle. In a normal standard driving state, a lane candidate point is set by narrowing the detection lane width threshold so as to detect a normal lane having a lane width standard of 10 to 15 cm. This makes it possible to prevent false detection.
第2の発明によれば、前記1本の車線幅の規格より幅広の車線や標示を検出した場合に検出車線幅閾値を拡大することで、そのような幅広の車線等を適切に検出することが可能となり、前記発明の効果がより適切に発揮される。 According to the second aspect of the present invention, when a lane or sign wider than the one lane width standard is detected, the detected lane width threshold value is expanded to appropriately detect such a wide lane or the like. And the effects of the present invention are more appropriately exhibited.
第3の発明によれば、自車両から見て所定距離内の画像の探索領域では検出車線幅閾値を狭く設定し、所定距離よりも遠い探索領域では広く設定することで、通常の1本の車線が存在する領域では検出車線幅閾値を狭く、幅広の車線等が存在する領域では検出車線幅閾値を広くすることができる。そのため、通常の1本の車線が存在する領域では車線候補点の誤検出を防止し、幅広の車線等が存在する領域ではそのような幅広の車線等を適切に検出することが可能となり、前記各発明の効果がより有効に発揮される。 According to the third aspect of the present invention, the detection lane width threshold is set narrow in the search area of the image within a predetermined distance when viewed from the host vehicle, and is set wide in the search area far from the predetermined distance. The detection lane width threshold value can be narrowed in a region where a lane exists, and the detection lane width threshold value can be increased in a region where a wide lane or the like exists. Therefore, it is possible to prevent erroneous detection of lane candidate points in an area where one normal lane exists, and to appropriately detect such a wide lane in an area where a wide lane exists, etc. The effect of each invention is exhibited more effectively.
第4の発明によれば、当初設定される前記所定距離を自車両の走行距離に応じて短縮することで、前記第3の発明のように画像の2つの探索領域で異なる検出車線幅閾値を自車両の走行にあわせて適切に設定することが可能となり、前記各発明の効果をより的確に発揮させることが可能となる。 According to the fourth aspect of the invention, by reducing the initially set predetermined distance in accordance with the travel distance of the host vehicle, different detection lane width thresholds are set in the two search areas of the image as in the third aspect of the invention. It is possible to set appropriately according to the traveling of the host vehicle, and it is possible to exert the effects of the respective inventions more accurately.
第5の発明によれば、高速道路では横断歩道は存在しないから、高速道路走行検出手段で自車両が高速道路を走行中であると検出した場合に検出車線幅閾値を拡大することで、高速道路の合流地点等に標示される太い破線状の標示を的確に検出することが可能となる。そのため、自車両の左右の車線位置をより的確に検出することが可能となり、前記各発明の効果がより的確に発揮される。 According to the fifth invention, since there is no pedestrian crossing on the highway, when the highway travel detection means detects that the vehicle is traveling on the highway, the detected lane width threshold is increased to increase the speed It is possible to accurately detect a thick broken-line marking that is marked at a junction or the like on the road. Therefore, it is possible to more accurately detect the left and right lane positions of the host vehicle, and the effects of the above-described inventions are more accurately exhibited.
第6の発明によれば、高速道路走行検出手段で自車両が高速道路を走行中であるとは検出されない一般道における走行中に横断歩道検出手段で横断歩道が検出された場合に、検出車線幅閾値を狭く設定することで、横断歩道を誤って車線として検出して従来例のように自車両の左右の車線位置を誤検出することを防止することが可能となる。そのため、前記各発明の効果をより的確に発揮させることができる。 According to the sixth aspect of the present invention, when a pedestrian crossing is detected by the pedestrian crossing detection means while traveling on a general road where the vehicle is not detected to be traveling on the highway by the highway travel detection means, the detected lane is detected. By setting the width threshold value narrow, it is possible to prevent the pedestrian crossing from being erroneously detected as a lane and erroneously detecting the left and right lane positions of the host vehicle as in the conventional example. Therefore, the effects of the above inventions can be more accurately exhibited.
第7の発明によれば、高速道路走行検出手段により自車両が高速道路を走行中であるとは検出されなかったが、横断歩道検出手段により横断歩道が検出されず、自車両が例えば高速で走行しているような場合には、高速道路を走行している可能性がある。そのような場合に検出車線幅閾値を拡大することで、高速道路の合流地点等に標示される太い破線状の標示を的確に検出することが可能となり、前記各発明の効果がより的確に発揮される。 According to the seventh aspect of the invention, the highway running detection means does not detect that the host vehicle is traveling on the highway, but the pedestrian crossing detection means does not detect the pedestrian crossing, and the own vehicle is, for example, at high speed. If you are traveling, you may be traveling on a highway. In such a case, by enlarging the detection lane width threshold, it becomes possible to accurately detect a thick broken-line marking that is marked at a junction of an expressway, etc., and the effects of each of the above-described inventions can be exhibited more accurately. Is done.
第8の発明によれば、幅広の車線や標示が一定距離以上連続して検出された場合に、検出車線幅閾値を拡大することで、黄色や白色の3本等の車線が並列に標示された車道中央線を確実に検出できるようになり、前記各発明の効果がより的確に発揮される。 According to the eighth invention, when wide lanes or markings are continuously detected for a certain distance or more, the detected lane width threshold value is expanded so that three lanes such as yellow and white are marked in parallel. Thus, the roadway center line can be reliably detected, and the effects of the above-described inventions can be exhibited more accurately.
第9の発明によれば、第8の発明における前記一定距離を横断歩道の一般的な長さ以上の距離とすることで、横断歩道のゼブラ模様のペイント部分を誤って検出することを確実に防止することが可能となり、前記第8の発明の効果がより効果的に発揮される。 According to the ninth aspect, by making the constant distance in the eighth aspect more than the general length of the pedestrian crossing, it is possible to reliably detect the zebra pattern paint portion of the pedestrian crossing. It becomes possible to prevent, and the effect of said 8th invention is exhibited more effectively.
以下、本発明に係る車線検出装置の実施の形態について、図面を参照して説明する。 Embodiments of a lane detection device according to the present invention will be described below with reference to the drawings.
本実施形態に係る車線位置検出装置1は、図1に示すように、主に撮像手段2と、変換手段3と、画像処理手段6と、検出手段9とから構成されている。
As shown in FIG. 1, the lane position detection apparatus 1 according to the present embodiment mainly includes an
撮像手段2は、車両周辺を撮像するものであり、所定のサンプリング周期で車両前方の道路を含む風景を撮像して一対の画像を出力するように構成されている。本実施形態では、互いに同期が取られたCCDやCMOSセンサ等のイメージセンサがそれぞれ内蔵された一対のメインカメラ2aおよびサブカメラ2bからなるステレオカメラが用いられている。本実施形態では、メインカメラ2aおよびサブカメラ2bにはCCDカメラが用いられている。
The imaging means 2 is for imaging the periphery of the vehicle, and is configured to capture a landscape including a road ahead of the vehicle at a predetermined sampling period and output a pair of images. In the present embodiment, a stereo camera including a pair of
メインカメラ2aとサブカメラ2bは、例えば、ルームミラー近傍に車幅方向に所定の間隔をあけて取り付けられている。前記一対のステレオカメラのうち、運転者に近い方のカメラが後述するように各画素について距離が算出され車線が検出される基となる画像を撮像するメインカメラ2a、運転者から遠い方のカメラが前記距離等を求めるために比較される画像を撮像するサブカメラ2bとされている。
The
メインカメラ2aおよびサブカメラ2bには、変換手段3としてのA/Dコンバータ3a、3bがそれぞれ接続されている。A/Dコンバータ3a、3bでは、メインカメラ2aおよびサブカメラ2bから出力されてきた一対のアナログ画像がそれぞれ画素ごとに例えば256階調のグレースケール等の所定の輝度階調の輝度値を有するデジタル画像に変換されるように構成されている。そして、前述した各画素について距離が算出され車線が検出される基となる画像から変換されたデジタル画像が基準画像として、また距離等を求めるために比較される画像から変換されたデジタル画像が比較画像として出力されるようになっている。
A /
A/Dコンバータ3a、3bには、画像補正部4が接続されている。画像補正部4では、A/Dコンバータ3a、3bから出力されてきた基準画像および比較画像に対してメインカメラ2aおよびサブカメラ2bの取付位置の誤差に起因するずれやノイズの除去等を含む輝度値の補正等の画像補正がアフィン変換等を用いて行われるようになっている。
An
なお、例えば、基準画像Tは図2に示されるような水平方向が512画素、垂直方向が200画素分の輝度値からなる画像データとして、比較画像は図示を省略するが水平方向が640画素、垂直方向が200画素分の輝度値からなる画像データとしてそれぞれ画像補正部4から出力されるように構成されている。また、それぞれの画像データは画像補正部4に接続された画像データメモリ5に格納され、同時に検出手段9に送信されるようになっている。
For example, as shown in FIG. 2, the reference image T is image data composed of luminance values of 512 pixels in the horizontal direction and 200 pixels in the vertical direction. The
前述したように、本実施形態では、メインカメラ2a等にCCDカメラが用いられている。メインカメラ2aやサブカメラ2bは、自車両前方の風景を下側から順に水平方向にライン状に走査して撮像し、各水平ラインごとに撮像されたデータを順次変換手段3に送信する。そして、変換手段3で送信させてきた水平ラインの各画素ごとに撮像データを所定の輝度階調の輝度値に変換され、画像補正部4で画像補正が行われた後、各水平ラインごとの画像データが画像データメモリ5に格納されると同時に検出手段9に順次送信されるようになっている。
As described above, in this embodiment, a CCD camera is used for the
画像補正部4には、画像処理手段6が接続されており、画像処理手段6は、主に、イメージプロセッサ7と距離データメモリ8とから構成されている。
An
イメージプロセッサ7では、ステレオマッチング処理とフィルタリング処理により画像補正部4から出力された基準画像Tおよび比較画像のデジタルデータに基づいて基準画像Tの各画素または複数画素から構成するブロックからなる各設定領域について実空間における距離を算出するための視差dpを算出するようになっている。この視差dpの算出については、本願出願人により先に提出された特開平5−114099号公報に詳述されているが、以下、その要点を簡単に述べる。
In the
イメージプロセッサ7は、512×200画素を有する基準画像Tについて4×4画素の画素ブロックごとに1つの視差dpを算出するようになっている。1つの画素ブロックを構成する16画素には、前述したようにそれぞれ0〜255の輝度値p1ijが割り当てられており、その16画素の輝度値p1ijがその画素ブロック特有の輝度値特性を形成している。
The
なお、輝度値p1ijの添字iおよびjは、基準画像Tの画像平面の左下隅を原点とし、水平方向をi座標軸、垂直方向をj座標軸とした場合の画素ブロックの左下隅の画素のi座標およびj座標を表す。また、比較画像については基準画像Tの原点に予め対応付けられた画素を原点として同様にi座標、j座標を取る。 The subscripts i and j of the luminance value p1ij are the i coordinates of the pixel at the lower left corner of the pixel block when the lower left corner of the image plane of the reference image T is the origin, the horizontal direction is the i coordinate axis, and the vertical direction is the j coordinate axis. And the j coordinate. For the comparison image, the i-coordinate and the j-coordinate are similarly taken with the pixel previously associated with the origin of the reference image T as the origin.
イメージプロセッサ7におけるステレオマッチング処理では、前記のように基準画像Tを4×4画素ごとに最大128×50個の画素ブロックに分割し、比較画像を水平方向に延在する4画素幅の水平ラインに分割する。そして、基準画像Tの1つの画素ブロックを取り出してそれに対応する比較画像の水平ライン上を1画素ずつ水平方向、すなわちi方向にシフトさせながら下記(1)式で求められるシティブロック距離CBが最小となる水平ライン上の画素ブロック、すなわち基準画像Tの画素ブロックと似た輝度値特性を有する比較画像上の画素ブロックを探索するようになっている。
CB=Σ|p1ij−p2ij| …(1)
In the stereo matching process in the
CB = Σ | p1ij−p2ij | (1)
なお、p2ijは比較画像上の座標(i,j)の画素の輝度値を表す。また、本実施形態では、前述したように画像補正部4から水平ラインごとの画像データが出力されるため、イメージプロセッサ7では、水平ライン4本分の画像データが入力されるごとに前記4×4画素の画素ブロックに対するステレオマッチング処理を行うようになっている。
P2ij represents the luminance value of the pixel at the coordinates (i, j) on the comparison image. In the present embodiment, as described above, the image data for each horizontal line is output from the
イメージプロセッサ7は、このようにして特定した比較画像上の画素ブロックともとの基準画像T上の画素ブロックとのずれ量を算出し、そのずれ量を視差dpとして基準画像T上の画素ブロックに割り付けるようになっている。
The
この視差dpは、前記メインカメラ2aおよびサブカメラ2bの一定距離の離間に由来する基準画像Tおよび比較画像における同一物体の写像位置に関する水平方向の相対的なずれ量であり、メインカメラ2aおよびサブカメラ2bの中央位置から物体までの距離と視差dpとを三角測量の原理に基づいて対応付けることができる。
The parallax dp is a relative displacement amount in the horizontal direction with respect to the mapping position of the same object in the reference image T and the comparison image derived from the
具体的には、実空間上で、メインカメラ2aおよびサブカメラ2bの中央真下の道路面上の点を原点とし、自車両の車幅方向すなわち左右方向にX軸、車高方向にY軸、車長方向すなわち距離方向にZ軸を取ると、距離画像上の点(i,j,dp)から実空間上の点(X,Y,Z)への座標変換は下記の(2)〜(4)式に基づいて行われる。
X=CD/2+Z×PW×(i−IV) …(2)
Y=CH+Z×PW×(j−JV) …(3)
Z=CD/(PW×(dp−DP)) …(4)
Specifically, in real space, a point on the road surface directly below the center of the
X = CD / 2 + Z * PW * (i-IV) (2)
Y = CH + Z × PW × (j−JV) (3)
Z = CD / (PW × (dp−DP)) (4)
すなわち、メインカメラ2aおよびサブカメラ2bの中央位置、正確には中央真下の道路面上の点から物体までの距離Lと視差dpとは、前記(4)式のZを距離Lとすることで一意に対応付けられる。ここで、CDはメインカメラ2aとサブカメラ2bとの間隔、PWは1画素当たりの視野角、CHはメインカメラ2aとサブカメラ2bの取り付け高さ、IVおよびJVは自車両正面の無限遠点の距離画像上のi座標およびj座標、DPは消失点視差を表す。
That is, the center position of the
また、イメージプロセッサ7は、視差dpの信頼性を向上させる目的から、このようにして求めた視差dpに対してフィルタリング処理を施し、有効とされた視差dpのみを出力するようになっている。すなわち、例えば、車道の映像のみからなる特徴に乏しい4×4画素の画素ブロックを比較画像の4画素幅の水平ライン上で走査しても、比較画像の車道が撮像されている部分ではすべて相関が高くなり、対応する画素ブロックが特定されて視差dpが算出されてもその視差dpの信頼性は低い。そのため、そのような視差dpは前記フィルタリング処理で無効とされ、視差dpの値として0を出力するようになっている。
Further, for the purpose of improving the reliability of the parallax dp, the
したがって、イメージプロセッサ7から出力される基準画像Tの各画素の距離L、すなわち基準画像Tの各画素ブロックについて実空間における距離を算出するための視差dpは、通常、基準画像Tの左右方向に隣り合う画素間で輝度値p1ijの差が大きいいわゆるエッジ部分についてのみ有効な値を持つデータとなる。
Accordingly, the distance L between the pixels of the reference image T output from the
イメージプロセッサ7で算出された基準画像Tの各画素ブロックの視差dpは前記(4)式に基づいてZすなわち距離Lに変換されて、画像処理手段6の距離データメモリ8に格納されるようになっている。なお、検出手段9における処理では、基準画像Tの1つの画素ブロックは4×4個の画素として扱われ、1画素ブロックに属する16個の画素は同一の距離Lを有する独立した画素(i,j)として処理されるようになっている。以下、画素(i,j)の距離LをLijと表す。
The parallax dp of each pixel block of the reference image T calculated by the
検出手段9は、図示しないCPUやROM、RAM、入出力インターフェース等がバスに接続されたマイクロコンピュータより構成されている。また、検出手段9には、車速センサAやGPS(Global Positioning System)受信機等を搭載したナビゲーション装置Bが接続されている。 The detection means 9 is composed of a microcomputer in which a CPU, ROM, RAM, input / output interface and the like (not shown) are connected to a bus. The detection means 9 is connected to a navigation device B equipped with a vehicle speed sensor A, a GPS (Global Positioning System) receiver, and the like.
検出手段9は、本実施形態では、高速道路走行検出部91と、横断歩道検出部92と、車線検出部93とで構成されている。
In this embodiment, the detection means 9 includes an expressway traveling
高速道路走行検出部91は、自車両が高速道路を走行中であるか否かを判断するようになっている。本実施形態では、高速道路走行検出部91は、ナビゲーション装置Bからの情報に基づいて前記判断を行うようになっている。
The highway
また、高速道路走行検出部91は、車速センサAからの情報に基づいて例えば自車両の車速が時速80km以上である状態が1分以上継続した場合には、自車両が高速道路を走行している或いは高速道路を走行し始めた可能性が高いと判断するようになっている。なお、自車両が高速道路を走行中であるか否か或いは高速道路を走行している可能性が高いか否かの判断を、後述する車線検出部93により検出される左右の車線位置の間隔に基づいて走行レーンの幅を測定し、その幅が所定距離以上であれば肯定的な判断を行うように構成することも可能である。
Moreover, the highway driving | running | working
横断歩道検出部92は、自車両から例えば50m前方に相当する基準画像T上の1画素幅の水平ラインj上を左端から右方向に走査して各画素の輝度値p1ijを読み取り、道路面上の点に相当する画素であって実空間上の距離として45〜50cm程度連続した高輝度の画素部分と低輝度の画素部分が例えば3個以上繰り返し存在する場合に、横断歩道を検出するようになっている。なお、他の方法で横断歩道を検出するように構成することも可能である。
The pedestrian
車線検出部93は、基準画像Tの各画素(i,j)の輝度値p1ijおよび距離Lijに基づいて基準画像T上における自車両の左右の車線位置を検出するようになっている。
The
具体的には、前述したように、車線検出部93には、基準画像Tの各画素(i,j)の輝度値p1ijのデータが基準画像Tの1画素幅分の水平ラインごとに画像補正部4から入力されるようになっている。そして、水平ラインが順次下側から上向きに1画素幅ずつオフセットされながら各画素の輝度値p1ijが入力され、最終的に基準画像Tの全画素(i,j)の輝度値p1ijのデータが車線検出部93に入力されるようになっている。
Specifically, as described above, the
なお、水平ライン上の各画素(i,j)のj座標は同一であることから、ライン上の各画素のj座標がjである水平ラインを水平ラインjと表す。 Since the j coordinate of each pixel (i, j) on the horizontal line is the same, a horizontal line in which the j coordinate of each pixel on the line is j is represented as a horizontal line j.
車線検出部93は、図3に示す基本フローに従って、画像補正部4から入力されてきた水平ラインj上を探索して、後述する条件を満たす画素を車線を表している可能性がある画素すなわち車線候補点として検出し、検出された車線候補点に基づいて自車両の左右の車線位置を検出するようになっている。
The
なお、車線候補点の探索は、基準画像Tの画像全体に対して行うことができる。すなわち、基準画像Tの全域を探索領域とすることができる。 The search for lane candidate points can be performed on the entire image of the reference image T. That is, the entire area of the reference image T can be set as a search area.
しかし、本実施形態では、車線候補点の誤検出の抑制や処理速度の向上等の観点から、図4に示すように前回のサンプリング周期における検出で自車両の左右に右車線位置LRlastおよび左車線位置LLlastが検出された場合には、今回の探索では、基準画像T上の前回の右車線位置LRlastおよび左車線位置LLlastの周囲のみを探索領域Sr、Slとして設定し、それらの領域内でのみ車線候補点の探索を行うようになっている。 However, in the present embodiment, from the viewpoint of suppressing erroneous detection of lane candidate points and improving the processing speed, as shown in FIG. 4, the right lane position LRlast and the left lane on the left and right of the host vehicle are detected in the previous sampling period as shown in FIG. When the position LLlast is detected, in this search, only the surroundings of the previous right lane position LRlast and left lane position LLlast on the reference image T are set as the search areas Sr and Sl, and only within those areas. Search for lane candidate points.
本実施形態では、探索領域Sr、Slは、前回の右車線位置LRlastおよび左車線位置LLlastから実空間上で左右方向にそれぞれ一定の距離だけ離間した位置までとされている。具体的には、図5に示すように、右車線位置LRlastや左車線位置LLlastに対して自車両に近い側、すなわち右車線位置LRlastの左側および左車線位置LLlastの右側の探索領域の規定値として内側規定値Wth_inが設定されており、右車線位置LRlastや左車線位置LLlastに対して自車両から遠い側、すなわち右車線位置LRlastの右側および左車線位置LLlastの左側の探索領域の規定値として外側規定値Wth_outが設定されている。内側規定値Wth_inおよび外側規定値Wth_outは40cm程度の値が適宜設定される。 In the present embodiment, the search areas Sr and Sl are set to positions separated from the previous right lane position LRlast and left lane position LLlast by a certain distance in the left-right direction in real space. Specifically, as shown in FIG. 5, the prescribed values of the search areas on the side close to the host vehicle with respect to the right lane position LRlast and the left lane position LLlast, that is, the left side of the right lane position LRlast and the right side of the left lane position LLlast. The inner specified value Wth_in is set as the specified value for the search area on the far side from the host vehicle with respect to the right lane position LRlast and the left lane position LLlast, that is, the right lane position LRlast and the left lane position LLlast. The outer specified value Wth_out is set. The inner specified value Wth_in and the outer specified value Wth_out are appropriately set to values of about 40 cm.
また、車線候補点の探索は、探索を行う水平ラインjと右車線側探索領域Srの左端および左車線側探索領域Slの右端と交点の画素をそれぞれの領域の探索開始点isとし、右車線側では水平ラインj上を右向きに、左車線側では水平ラインj上を左向きにそれぞれ1画素ずつオフセットしながら探索するようになっている。 Further, the search for the lane candidate point is performed by using the horizontal line j to be searched, the left edge of the right lane side search area Sr, and the right edge of the left lane side search area S1 as intersection pixels as search start points is of the respective areas, and the right lane. On the side, the search is performed by offsetting one pixel at a time on the horizontal line j to the right, and on the left lane side to the left on the horizontal line j.
また、探索は、水平ラインjと右車線側探索領域Srの右端および左車線側探索領域Slの左端と交点の画素をそれぞれの領域の探索終了点ieとしてそれぞれの探索終了点ieまで行われるようになっている。なお、後述するように、開始点Psが見出されて第1車線幅閾値Wth1が設定されると、探索終了点ieを超えても第1車線幅閾値Wth1に達するまでは水平ラインj上の探索が続行される。 Further, the search is performed up to each search end point ie using the pixel at the intersection of the horizontal line j and the right end of the right lane side search region Sr and the left end of the left lane side search region S1 as the search end point ie of each region. It has become. As will be described later, when the start point Ps is found and the first lane width threshold value Wth1 is set, the first lane width threshold value Wth1 is exceeded until the first lane width threshold value Wth1 is reached. The search continues.
車線検出部93は、図3の基本フローの第1プロセスである車線候補点検出変換処理(ステップS10)において、図6に示すフローチャートに従って車線候補点を検出するようになっている。なお、左右の探索領域Sr、Slについての車線候補点の検出は同様に行われるから、以下、代表して右車線側探索領域Srを探索する場合について述べる。また、左車線側探索領域Slの探索は同一水平ラインjについて右車線側探索領域Srの探索と同時に行われるように構成されている。
The
車線検出部93は、画像補正部4から基準画像Tの水平ラインj上の各画素(i,j)の輝度値p1ijが送信されてくると、図4に示した要領で探索領域Srについての探索開始点isおよび探索終了点ieを設定する(ステップS101)。車線検出部93は、続いて、探索する画素を右方にオフセットさせながら(ステップS102)、探索画素が下記の第1開始点条件を満たすか否かを判断する(ステップS103)。
When the luminance value p1ij of each pixel (i, j) on the horizontal line j of the reference image T is transmitted from the
[第1開始点条件]
条件1:その探索画素の輝度値p1ijが道路面輝度値proadより第1開始点輝度閾値pth1以上大きく、かつ、輝度微分値で表されるエッジ強度Eijが第1開始点エッジ強度閾値Eth1以上であること。
条件2:その探索画素に対応する実空間上の点が道路面上にあること。
ここで、道路面輝度値proadは、現在探索が行われている水平ラインjの直下のすでに探索が行われた4行分の水平ラインj−1、j−2、j−3、j−4上における画素の輝度値ヒストグラムの出現度数が最大となる輝度値として水平ラインjごとに算出される。
[First start point condition]
Condition 1: The luminance value p1ij of the search pixel is greater than the road surface luminance value proad by the first start point luminance threshold pth1 and the edge intensity Eij represented by the luminance differential value is greater than or equal to the first start point edge intensity threshold Eth1. There is.
Condition 2: A point on the real space corresponding to the search pixel is on the road surface.
Here, the road surface brightness value proad is the horizontal lines j-1, j-2, j-3, j-4 for four rows that have already been searched immediately below the horizontal line j currently being searched. It is calculated for each horizontal line j as a luminance value that maximizes the frequency of appearance of the luminance value histogram of the above pixel.
前記条件1は、図7(A)、(B)に示すように輝度値p1ijが道路面輝度値proadから閾値pth1以上に大きくなり輝度微分値であるエッジ強度Eijが閾値Eth1以上である車線の一方のエッジ部分に対応する探索画素を、車線候補点となり得る開始点として見出すための条件である。条件2は、道路面より上方にある先行車のピラーやバンパ等の車体部分やガードレール、電信柱等のエッジ部分である探索画素を開始点から除外するための条件である。
As shown in FIGS. 7A and 7B, the condition 1 is that the luminance value p1ij increases from the road surface luminance value proad to the threshold value pth1 or more and the edge intensity Eij as the luminance differential value is the threshold value Eth1 or more. This is a condition for finding a search pixel corresponding to one edge portion as a start point that can be a lane candidate point.
車線検出部93は、条件1を満たす画素が現れると、その画素についての距離Lijを距離データメモリ8から読み出してその画素に対応する実空間上の点が道路面上にあるか否かを判断する。
When a pixel satisfying the condition 1 appears, the
ここで、条件2を満たすか否かの判断の手法について簡単に説明する。図8に示すように、まず、基準画像T上の探索画素Mが属する水平ラインjに消失点Vpから引いた垂線の足を画素mとすると、画素mに対応する実空間上の点mは自車両の正面に位置する。点mが道路面上にあるとすると、自車両に搭載されたメインカメラ2aから点mまでの距離をLm、メインカメラ2aの焦点距離をf、メインカメラ2aの取付高さをhとすると、メインカメラ2aの結像位置における点mの映像と消失点Vpとのずれyは、
y=h×f/Lm …(5)
で表される。
Here, a method for determining whether or not the
y = h × f / L m (5)
It is represented by
基準画像T上での画素mと消失点Vpとの画素間隔をypixelとすると、ピクセル長をpとしたときypixel=y/pの関係が成り立つから、画素mと消失点Vpとの画素間隔ypixelとメインカメラ2aから点mまでの距離Lmとは、
ypixel=y/p=h×f/(Lm×p) …(6)
すなわち、
Lm=h×f/(p×ypixel) …(7)
の関係が成り立つ。消失点Vpのj座標は予め分かっているから、水平ラインjのj座標から(7)式に基づいて実空間上の自車両から点mまでの距離Lmが算出される。
Assuming that the pixel interval between the pixel m and the vanishing point Vp on the reference image T is ypixel, the relationship ypixel = y / p is established when the pixel length is p. Therefore, the pixel interval ypixel between the pixel m and the vanishing point Vp. And the distance L m from the
ypixel = y / p = h × f / (L m × p) (6)
That is,
L m = h × f / (p × ypixel) (7)
The relationship holds. Since the j coordinate of the vanishing point Vp is known in advance, the distance L m from the host vehicle to the point m in the real space is calculated from the j coordinate of the horizontal line j based on the equation (7).
また、同様にして、基準画像Tの画素mと探索画素Mとの画素間隔xpixelから実空間上の点mと探索画素Mに対応する道路面上の点Mとの距離Lm-Mが算出でき、この距離Lm-Mと前記距離Lmとから自車両と道路面上の点Mとの実空間上の距離LMが算出される。 Similarly, the distance L mM between the point m on the real space and the point M on the road surface corresponding to the search pixel M can be calculated from the pixel interval xpixel between the pixel m of the reference image T and the search pixel M. From this distance L mM and the distance L m , a distance L M in real space between the vehicle and a point M on the road surface is calculated.
そして、この実空間上の自車両と道路面上の点Mとの距離LMと、距離データメモリ8から読み出された距離Lijとを比較して、一定の誤差範囲で一致すれば探索画素Mに対応する実空間上の点Mは道路面上にあると判断でき、距離Lijが前記距離LMより小さければ、探索画素Mに対応する実空間上の点Mは道路面より高い位置に存在する先行車のピラー等であり点Mは道路面上にはないと判断することができる。
Then, the distance L M between the vehicle in the real space and the point M on the road surface is compared with the distance Lij read from the
車線検出部93は、探索画素が前記第1開始点条件を満たすと判断すると(図6のステップS103:YES)、その探索画素を開始点PsとしてRAM上にセットし、第1車線幅閾値Wth1をセットする(ステップS104)。第1車線幅閾値Wth1は、開始点Psが検出された場合に探索範囲を確保するための閾値であり、例えば実空間上の距離として1mに設定されている。第1車線幅閾値Wth1を水平ラインjのjに依存して可変とすることも可能である。
If it is determined that the search pixel satisfies the first start point condition (step S103 in FIG. 6: YES), the
車線検出部93は、開始点Psと第1車線幅閾値Wth1とをセットすると、さらに水平ラインj上を右方に探索を続け、探索画素が下記の第2開始点条件を満たすか否かを判断する(ステップS105)。これは、図9に示すように開始点Psとしてセットされた画素が実際には消えかかった古い車線Loldの端部に対応する画素Psoldであり、その古い車線Loldと一部重なるようにして新しく塗り直された車線Lnewが引かれている場合に、元の開始点Ps等のセットを取り消して、塗り直された車線Lnewの端部に対応する画素Psnewを開始点Psとして新たにセットするための判断基準である。
When the
[第2開始点条件]
条件3:その探索画素の輝度値p1ijが道路面輝度値proadより第2開始点輝度値閾値pth2以上大きく、かつ、輝度微分値で表されるエッジ強度Eijが第2開始点エッジ強度閾値Eth2以上であること。ただし、pth2>pth1。
条件4:開始点Psからその探索画素の左隣の画素までの平均輝度値と道路面輝度値proadとの差が第1車線平均輝度値閾値Ath1以下であること。
条件5:その探索画素に対応する実空間上の点が道路面上にあること。
[Second starting point condition]
Condition 3: The luminance value p1ij of the search pixel is larger than the road surface luminance value proad by the second starting point luminance value threshold value pth2, and the edge strength Eij represented by the luminance differential value is equal to or larger than the second starting point edge strength threshold value Eth2. Be. However, pth2> pth1.
Condition 4: The difference between the average luminance value from the start point Ps to the pixel adjacent to the left of the search pixel and the road surface luminance value proad is equal to or less than the first lane average luminance value threshold Ath1.
Condition 5: A point on the real space corresponding to the search pixel is on the road surface.
そして、探索画素が前記第2開始点条件を満たす場合には(ステップS105:YES)、車線検出部93は、元の開始点Psおよび第1車線幅閾値Wth1のセットを解除し、現在の探索画素を新たな開始点Psとして再セットし、第1車線幅閾値Wth1も再セットする(ステップS106)。
When the search pixel satisfies the second start point condition (step S105: YES), the
なお、図10(A)は第2開始点条件の第2開始点輝度閾値pth2を説明する図であり、図10(B)は第2開始点エッジ強度閾値Eth2を説明する図である。また、条件4において、元の開始点から現在の探索画素の左隣の画素までの領域Kの平均輝度値と道路面輝度値proadとの差が閾値Ath1より大きければ、その領域Kに対応する車線は現在もいわば生きている車線として標示されていると考えられるから、開始点Psを再セットする必要はない。
FIG. 10A is a diagram for explaining the second start point luminance threshold value pth2 of the second start point condition, and FIG. 10B is a diagram for explaining the second start point edge intensity threshold Eth2. If the difference between the average luminance value of the region K from the original start point to the pixel adjacent to the left of the current search pixel and the road surface luminance value proad is larger than the threshold value Ath1 in the
また、通常の車線位置検出では、古い車線Loldの上に塗り直された車線Lnewではなく、最初から通常の車線が検出される場合が多いが、その場合には、前記第1開始点条件を満たす探索画素は同時に第2開始点条件を満たす。そのため、第1開始点条件を満たした時点で開始点Psとしてセットされ、第1車線幅閾値Wth1がセットされ、即座に第2開始点条件を満たすと判断されて開始点Ps等が再セットされる。 Further, in the normal lane position detection, the normal lane is often detected from the beginning instead of the lane Lnew repainted on the old lane Lold. Satisfactory search pixels simultaneously satisfy the second start point condition. Therefore, when the first start point condition is satisfied, it is set as the start point Ps, the first lane width threshold Wth1 is set, it is immediately determined that the second start point condition is satisfied, and the start point Ps and the like are reset. The
車線検出部93は、水平ラインj上を右方に探索を続け、探索画素が下記の終了点条件を満たすか否かを判断する(図6のステップS107)。
[終了点条件]
条件6:その探索画素の輝度微分値で表されるエッジ強度Eijが終了点エッジ強度閾値−Eth2以下であるか、またはその探索画素の輝度値が開始点Psにおける輝度値より小さいこと。
The
[End condition]
Condition 6: The edge intensity Eij represented by the luminance differential value of the search pixel is equal to or less than the end point edge intensity threshold −Eth2, or the luminance value of the search pixel is smaller than the luminance value at the start point Ps.
これは、図示を省略するが、終了点Peが車線に対応する高輝度の画素から道路面に対応する低輝度値の画素に移行し、車線の反対側のエッジ部分に対応する点であることを表す。なお、本実施形態では、終了点エッジ強度閾値−Eth2の絶対値は前記第2開始点エッジ強度閾値Eth2の絶対値と同一に設定されている。 Although not shown, the end point Pe is a point corresponding to the edge portion on the opposite side of the lane, from the high luminance pixel corresponding to the lane to the low luminance value pixel corresponding to the road surface. Represents. In the present embodiment, the absolute value of the end point edge intensity threshold −Eth2 is set to be the same as the absolute value of the second start point edge intensity threshold Eth2.
車線検出部93は、終了点条件を満たす点、すなわち終了点Peが検出されなければ(ステップS107:NO)、第1車線幅閾値Wth1に達するまで探索を行い、第1車線幅閾値Wth1に達しても終了点Peが検出されない場合は(ステップS108:YES)、開始点Psおよび第1車線幅閾値Wth1のセットを解除する。
If a point that satisfies the end point condition, that is, the end point Pe is not detected (step S107: NO), the
そして、探索終了点ieに達していなければ(ステップS102:NO)、引き続き水平ラインj上の探索を続行し、探索画素が第1開始点条件を満たすか否かの判断(ステップS103)からの前記処理を繰り返す。なお、このフローチャートから分かるように、開始点Psから右方に探索を続けて探索終了点ieを超える場合でも第1車線幅閾値Wth1に達していなければ第1車線幅閾値Wth1に達するまで水平ラインj上の探索が続行される。 If the search end point ie has not been reached (step S102: NO), the search on the horizontal line j is continued and the determination from the determination whether the search pixel satisfies the first start point condition (step S103). Repeat the above process. As can be seen from this flowchart, even if the search continues to the right from the start point Ps and exceeds the search end point ie, the horizontal line is not reached until the first lane width threshold Wth1 is reached. The search on j continues.
また、車線検出部93は、終了点Peを検出すると(ステップS107:YES)、開始点Psから終了点Peの左隣の画素までの平均輝度値が下記の第1平均輝度値条件を満たすか否かを判断する(ステップS109)。
[第1平均輝度値条件]
条件7:開始点Psから終了点Peの左隣の画素までの平均輝度値と道路面輝度値proadとの差が前記第1車線平均輝度値閾値Ath1以下であること。
Further, when the
[First average luminance value condition]
Condition 7: The difference between the average luminance value from the start point Ps to the pixel adjacent to the left of the end point Pe and the road surface luminance value proad is equal to or less than the first lane average luminance value threshold Ath1.
本実施形態では、この条件7における第1車線平均輝度値閾値Ath1は、前記第2開始点条件の条件4における第1車線平均輝度値閾値Ath1と同一の値が用いられる。前述したように、第1車線平均輝度値閾値Ath1は、消えかかった古い車線Loldに対応する平均輝度値と新たに塗り直された車線Lnewに対応する平均輝度値とを分ける閾値である。
In the present embodiment, the first lane average luminance value threshold Ath1 in the
車線検出部93は、開始点Psから終了点Peの左隣の画素までの平均輝度値が前記第1平均輝度値条件を満たす(ステップS109:YES)、すなわち、平均輝度値が低い車線に相当する平均輝度値であると判断すると、この車線の近くに新しく塗られた車線がある可能性があるため、既に車線候補点が図示しない記憶手段に保存されていなければ(ステップS110:YES)、この開始点Psの座標(i,j)をとりあえず車線候補点として保存し(ステップS111)、さらに水平ラインj上の探索を続ける。
The
一方、車線検出部93は、開始点Psから終了点Peの左隣の画素までの平均輝度値が前記第1平均輝度値条件を満たさない(ステップS109:NO)、すなわち、平均輝度値が高い車線に相当する平均輝度値であると判断すると、同一の水平ラインj上の探索で既に保存されている平均輝度値が低い車線に対応する車線候補点があれば(ステップS112:YES)、その車線候補点を削除して(ステップS113)、平均輝度値が高い方の開始点Psを車線候補点として保存して(ステップS114)、同一水平ラインj上の探索を打ち切る。
On the other hand, the
本実施形態では、以上のように、水平ラインj上の探索が終了する場合は、平均輝度値が高い車線が見出されて探索が打ち切られた場合、平均輝度値が低い車線しか見出されず探索終了点ieに達した場合、車線が見出されず探索終了点ieに達した場合の3通りの場合である。そして、平均輝度値が高くいわば生きている車線が見出されればその車線を優先しながら、第1開始点条件または第2開始点条件を満たす画素のうち自車両に最も近い画素を車線候補点として検出する。 In the present embodiment, as described above, when the search on the horizontal line j ends, when a lane with a high average luminance value is found and the search is terminated, only the lane with a low average luminance value is found and the search is completed. When the end point ie is reached, there are three cases where the lane is not found and the search end point ie is reached. Then, if a live lane is found with a high average luminance value, priority is given to the lane, and among the pixels satisfying the first start point condition or the second start point condition, the pixel closest to the host vehicle is set as the lane candidate point. To detect.
水平ラインj上の探索が終了すると、車線検出部93は、車線候補点が保存されているか否かを判断する(ステップS115)。車線候補点が保存されていなければ(ステップS115:NO)、水平ラインjが200行目に達したか否かを判断し(ステップS116)、200行目に達していなければ(ステップS116:NO)、200行目に達するまで、画像補正部4から送信されてきた1画素分上側の水平ラインj+1について前記処理手順を繰り返す。
When the search on the horizontal line j ends, the
車線候補点が保存されていれば(ステップS115:YES)、車線検出部93は、続いて太い標示数カウント処理(ステップS117)を行うようになっている。
If the lane candidate points are stored (step S115: YES), the
太い標示数カウント処理は、通常の連続線や破線で標示された車線より幅広に標示された標示、例えば横断歩道のゼブラ模様や道路中央に複数本が並列に標示された白色、黄色等の車線、或いは高速道路の合流地点等に標示された太い破線状の標示に対応する車線候補点の数をカウントする処理である。 Thick sign count processing is performed on white, yellow, and other lanes that are marked wider than the lanes marked with normal continuous lines or broken lines, such as zebra patterns on pedestrian crossings or multiple lines in the center of the road. Alternatively, it is a process of counting the number of lane candidate points corresponding to a thick broken-line marking marked at a junction of an expressway or the like.
本実施形態では、自車両の前方約10mから20mの範囲で太い標示に対応する車線候補点の数をカウントし、後述する検出モード切替(図3のステップS40)の判断材料を集計するようになっている。 In the present embodiment, the number of lane candidate points corresponding to thick markings in the range of about 10 m to 20 m ahead of the host vehicle is counted, and the determination materials for detection mode switching (step S40 in FIG. 3) to be described later are tabulated. It has become.
具体的には、車線検出部93は、太い標示数カウント処理(ステップS117)においては、図11に示すように、まず、現在探索中の水平ラインjが前述したように自車両の前方約10mから20mの範囲内の領域を探索中か否かを判断し(ステップS118)、範囲内でなければ(ステップS118:NO)、この処理を行わずに続く検出車線幅閾値変更処理(ステップS121)に移行する。
Specifically, in the thick marking number counting process (step S117), the
また、水平ラインjが前記範囲内にあると判断すると(ステップS118:YES)、車線検出部93は、続いて車線候補点とそれに対応する終了点Peとの間の実空間上の距離を算出するようになっている。これらの実空間上の距離は前記要領で自車両から車線候補点までの距離Lijと車線候補点と終了点Pe間の画素数から求めることができる。なお、車線候補点と終了点Peとの距離は、車線やその他の標示の左右方向の長さすなわち幅に相当する。
If it is determined that the horizontal line j is within the above range (step S118: YES), the
車線検出部93は、算出した車線候補点と終了点Peとの距離が第2車線幅閾値Wth2以内か否かを判断し(ステップS119)、それらの距離すなわち標示の幅が第2車線幅閾値Wth2より大きければ(ステップS119:NO)、太い標示数カウントを1増加させて(ステップS120)太い標示に対応する車線候補点の数をカウントしていくようになっている。なお、第2車線幅閾値Wth2は、標示が通常の車線であるか或いは前記太い表示であるか判別するための閾値であり、例えば30cmに設定される。
The
車線検出部93は、続いて、検出車線幅閾値変更処理(図6のステップS121)を行うようになっている。
Subsequently, the
検出車線幅閾値Wthdとは、車線候補点とそれに対応する終了点Peとの距離すなわち車線幅または標示の幅に応じて検出されたその車線候補点を残して後述するハフ変換(ステップS132)の対象とするか或いは削除するかを判別するための閾値である。 The detected lane width threshold Wthd is the Hough transform (step S132) described later, leaving the lane candidate point detected according to the distance between the lane candidate point and the corresponding end point Pe, that is, the lane width or the width of the marking. This is a threshold value for determining whether to be a target or to be deleted.
前述したように、第1車線幅閾値Wth1は開始点Psが検出された場合に探索範囲を確保するための閾値であり、また第2車線幅閾値Wth2は標示が通常の車線であるか或いは前記太い表示であるか判別するための閾値であり、ともに設定された数値に固定している。 As described above, the first lane width threshold value Wth1 is a threshold value for securing a search range when the start point Ps is detected, and the second lane width threshold value Wth2 is an indication that the sign is a normal lane or It is a threshold value for determining whether the display is thick, and both are fixed to a set numerical value.
一方、検出車線幅閾値Wthdは下記のように自車両の走行環境や道路環境の条件に応じて可変とされており、自動的に変更されるようになっている。なお、検出車線幅閾値Wthdは、標準検出モードにおいては1本の車線幅の規格すなわち10〜15cm幅の車線を検出可能で、規格が45〜50cmとされる横断歩道のゼブラ模様を検出しない値、すなわち例えば30cmに設定される。 On the other hand, the detected lane width threshold value Wthd is variable according to the conditions of the traveling environment of the host vehicle and the road environment as described below, and is automatically changed. Note that the detected lane width threshold Wthd is a value that can detect a lane width standard, that is, a lane with a width of 10 to 15 cm and does not detect a zebra pattern of a pedestrian crossing with a standard of 45 to 50 cm in the standard detection mode. That is, for example, it is set to 30 cm.
なお、本実施形態では、車線位置の検出モードとして標準検出モードと太い車線検出モードの2種類が設定できるようになっている。標準検出モードは、前記のように通常の車線幅の車線を検出し、それより幅広の車線は検出しない検出モードであり、太い車線検出モードは、幅広の車線を検出可能な検出モードである。 In the present embodiment, two types of lane position detection modes can be set: a standard detection mode and a thick lane detection mode. As described above, the standard detection mode is a detection mode in which a lane having a normal lane width is detected and a lane wider than that is not detected. The thick lane detection mode is a detection mode in which a wide lane can be detected.
車線検出部93は、検出車線幅閾値変更処理(ステップS121)においては、図12に示すように、前記高速道路走行検出部91で自車両が高速道路を走行中であるという判断がなされていれば(ステップS122:YES)、検出車線幅閾値Wthdを例えば55cmに拡大する(ステップS123)。
In the detected lane width threshold value changing process (step S121), the
また、自車両が高速道路を走行中ではなく(ステップS122:NO)、横断歩道検出部92により自車両の前方に横断歩道が検出されていれば(ステップS124:YES)、自車両から横断歩道までの距離R1を前方50mを意味する50に設定し(ステップS125)、検出車線幅閾値Wthdを例えば30cmに設定するようになっている(ステップS126)。なお、R1は初期値として0が設定される。 If the host vehicle is not traveling on the expressway (step S122: NO) and the pedestrian crossing is detected in front of the host vehicle by the pedestrian crossing detection unit 92 (step S124: YES), the pedestrian crossing from the host vehicle is performed. The distance R1 is set to 50 which means 50m ahead (step S125), and the detected lane width threshold Wthd is set to 30 cm, for example (step S126). R1 is set to 0 as an initial value.
横断歩道は、自車両前方50mの地点に検出されなくなった後も後述する検出モード切替処理(ステップS40)で自車両から横断歩道までの距離R1が更新されることで追跡され、横断歩道が図2に示した基準画像Tの最下端の水平ラインjから下方に見えなくなるまで、すなわち、横断歩道と自車両との距離R1が、基準画像Tの最下端の水平ラインjに対応する実空間上の位置と自車両との距離Runseen以下になるまで追跡される。 Even after the pedestrian crossing is no longer detected at a point 50 m ahead of the host vehicle, the distance R1 from the host vehicle to the pedestrian crossing is updated in the detection mode switching process (step S40) described later. 2, until the distance R1 between the pedestrian crossing and the host vehicle is in the real space corresponding to the lowest horizontal line j of the reference image T. The vehicle is tracked until the distance between the vehicle and the vehicle is less than or equal to Runseen.
そのため、横断歩道検出部92により自車両の前方に横断歩道が検出されていなくても(ステップS124:NO)、横断歩道と自車両との距離R1が前記距離Runseenより大きければ(ステップS127:YES)、横断歩道がまだ基準画像T上に撮像されているから検出車線幅閾値Wthdを例えば30cmに狭く設定する(ステップS126)。なお、距離Runseenは予めメインカメラ2aの設置状態により決定される。
Therefore, even if a pedestrian crossing is not detected in front of the host vehicle by the pedestrian crossing detection unit 92 (step S124: NO), if the distance R1 between the pedestrian crossing and the host vehicle is larger than the distance Runseen (step S127: YES) ) Since the pedestrian crossing is still imaged on the reference image T, the detected lane width threshold Wthd is set to be narrow, for example, 30 cm (step S126). The distance Runseen is determined in advance according to the installation state of the
一方、車線検出部93は、横断歩道が検出されていない或いは検出されても距離R1が前記距離Runseen以下になれば(ステップS127:NO)、続いて、前記高速道路走行検出部91により自車両が高速道路を走行している或いは高速道路を走行し始めた可能性が高いと判断された場合には(ステップS128:YES)、検出車線幅閾値Wthdを例えば55cmに拡大する(ステップS123)。
On the other hand, if no pedestrian crossing is detected or the distance R1 is equal to or less than the distance Runseen (step S127: NO), the
また、車線検出部93は、自車両が高速道路を走行している或いは高速道路を走行し始めた可能性が低く(ステップS128:NO)、現在の検出モードが太い車線検出モードでなければ(ステップS129:NO)、検出車線幅閾値Wthdを例えば30cmに設定するようになっている(ステップS126)。
Further, the
また、車線検出部93は、現在の検出モードが太い車線検出モードであれば(ステップS129:YES)、現在探索を行っている水平ラインjに対応する実空間上のラインの自車両に対する距離が後述する所定距離R2以内であるか否かを判断する(ステップS130)。そして、所定距離R2以内であれば(ステップS130:YES)、検出車線幅閾値Wthdを例えば30cmに設定し(ステップS126)、所定距離R2より遠ければ(ステップS130:NO)、検出車線幅閾値Wthdを例えば55cmに拡大するようになっている(ステップS123)。
Further, if the current detection mode is a thick lane detection mode (step S129: YES), the
なお、本実施形態では、検出車線幅閾値Wthdを例えば30cm或いは55cmの2種類しか設けない場合について述べるが、前記種々の条件に合わせて設定値を適宜変えて設定するように構成することも可能である。 In the present embodiment, the case where only two types of detection lane width threshold values Wthd are provided, for example, 30 cm or 55 cm will be described. However, it is also possible to configure so that the set value is appropriately changed according to the various conditions. It is.
車線検出部93は、以上のようにして検出車線幅閾値Wthdを設定すると、続いて、前記太い標示数カウント(図6のステップS117)で算出した車線候補点とそれに対応する終了点Peとの間の実空間上の距離が設定された検出車線幅閾値Wthd以内か否かを判断するようになっている(ステップS131)。
When the
そして、車線候補点と終了点Peとの距離が検出車線幅閾値Wthdより大きければ(ステップS131:NO)、その車線候補点を削除するようになっている(ステップS132)。 If the distance between the lane candidate point and the end point Pe is larger than the detected lane width threshold Wthd (step S131: NO), the lane candidate point is deleted (step S132).
また、車線検出部93は、車線候補点と終了点Peとの距離が検出車線幅閾値Wthd以内であれば(ステップS131:YES)、続いて、車線候補点から終了点Peの左隣の画素までの平均輝度値が下記の第2平均輝度値条件を満たすか否かを判断する(ステップS133)。
If the distance between the lane candidate point and the end point Pe is within the detected lane width threshold Wthd (step S131: YES), the
[第2平均輝度値条件]
条件8:車線候補点から対応する終了点Peの左隣の画素までの平均輝度値と道路面輝度値proadとの差が第2車線平均輝度値閾値Ath2以上であること。
[Second average luminance value condition]
Condition 8: The difference between the average luminance value from the lane candidate point to the left adjacent pixel of the corresponding end point Pe and the road surface luminance value proad is equal to or greater than the second lane average luminance value threshold Ath2.
本実施形態では、前述したように第1車線平均輝度値閾値Ath1は、消えかかった古い車線Loldに対応する平均輝度値と新たに塗り直された車線Lnewに対応する平均輝度値とを画する閾値であったが、条件8における第2車線平均輝度値閾値Ath2は、車線として最低限要求される平均輝度値と道路面輝度値proadとの差を画するものであり、第1車線平均輝度値閾値Ath1より小さい値が適宜設定される。
In the present embodiment, as described above, the first lane average luminance value threshold Ath1 defines the average luminance value corresponding to the old lane Lold that has disappeared and the average luminance value corresponding to the newly repainted lane Lnew. The second lane average luminance value threshold value Ath2 in
車線検出部93は、車線候補点が第2平均輝度値条件を満たさないと判断すると(ステップS133:NO)、その車線候補点を削除する(ステップS132)。一方、車線候補点が第2平均輝度値条件を満たすと判断すると(ステップS133:YES)、その車線候補点を削除せずに残し、図13に示すように、最終的にその水平ラインj上に車線候補点(Ij,Jj)が検出される。
If the
車線検出部93は、続いて、以上のようにして水平ラインj上に検出した車線候補点に対してハフ変換を実行するようになっている(ステップS134)。なお、ハフ変換は、基準画像T上の複数の車線候補点に基づいて車線位置検出の基準となる直線を検出することを目的とするものである。
Subsequently, the
本実施形態では、ハフ変換については公知の方法が用いられる。具体的には、例えば、検出された車線候補点が基準画像T上の直線
i=aj+b …(8)
上に存在すると仮定すると、Ij、Jjは、
Ij=aJj+b …(9)
を満たす。
In the present embodiment, a known method is used for the Hough transform. Specifically, for example, the detected lane candidate point is a straight line on the reference image T i = aj + b (8)
Assuming that it exists above, I j and J j are
I j = aJ j + b (9)
Meet.
前記(9)式は、
b=−Jj×a+Ij …(10)
と変形できる。(10)式から分かるように、前記車線候補点検出処理で水平ラインj上に車線候補点(Ij,Jj)が検出されると、−Jj、Ijを傾きおよびb切片として図14に示すようにハフ平面であるa−b平面上に1本の直線を引くことができる。
The equation (9) is
b = −J j × a + I j (10)
And can be transformed. As can be seen from the equation (10), when the lane candidate point (I j , J j ) is detected on the horizontal line j in the lane candidate point detection process, −J j , I j are shown as slopes and b intercepts. As shown in FIG. 14, one straight line can be drawn on the ab plane which is a Hough plane.
a−b平面は、図15に示すように所定の大きさに升目に区切られており、(10)式で表される直線が引かれると、図15の斜線を付した升目のような直線が通過する升目の計数値が1増加される。なお、a−b平面の各升目には所定のaおよびbの値が対応しているから、a−b平面で升目を選択することは、対応するa、bの値を選択すること、すなわち(8)式で表されるように基準画像T上に傾きa、i切片bの直線を選択することと同義である。 The ab plane is divided into cells having a predetermined size as shown in FIG. 15, and when a straight line represented by the equation (10) is drawn, a straight line like a hatched cell in FIG. The count value of the mesh that passes is increased by one. It should be noted that since the predetermined a and b values correspond to each cell on the ab plane, selecting the cell on the ab plane means selecting the corresponding a and b values, This is synonymous with selecting a straight line having an inclination a and an i-intercept b on the reference image T as expressed by equation (8).
車線検出部93は、基準画像T上を水平ラインを上向きに1画素分ずつずらしながら探索を行い、各水平ライン上に車線候補点が検出されるごとに前記ハフ変換を行ってa−b平面の升目の計数値を加算していくようになっている。そして、最終的に基準画像Tの最上段の200行目の水平ラインまで探索が終了すると、図16の領域Aに示すように複数の車線候補点が得られ、a−b平面の各升目にはそれぞれ計数値が加算された状態となる。
The
なお、図16以下の図では、車線候補点が基準画像T上や実空間上でいわば疎らに検出されるように示されているが、実際には非常に細かく多数検出される。また、上記では右車線側探索領域Srを探索する場合について述べたが、左車線側探索領域Slを探索する場合についても同様に検出された車線候補点(Ij,Jj)についてハフ変換が行われ、右車線側探索領域Srの場合とは別個にa−b平面が作成され、a−b平面の各升目にはそれぞれ計数値が加算される。 In FIG. 16 and subsequent figures, lane candidate points are shown to be sparsely detected on the reference image T or in real space, but in reality, a large number are detected very finely. In the above description, the case of searching the right lane side search area Sr has been described. However, in the case of searching the left lane side search area S1 as well, the Hough transform is performed on the detected lane candidate point (I j , J j ). The ab plane is created separately from the case of the right lane side search area Sr, and a count value is added to each cell of the ab plane.
水平ラインj上の右向きおよび左向きの探索で検出されたすべての車線候補点に対するハフ変換および2枚のa−b平面の各升目への計数値の加算を終え、200行目の水平ラインjの探索が終了すると(図6のステップS116:YES)、図3に示した基本フローの第1プロセスである車線候補点検出変換処理(ステップS10)が終了する。 After completing the Hough transform for all lane candidate points detected in the rightward and leftward searches on the horizontal line j and adding the count value to each square of the two ab planes, the horizontal line j of the 200th row When the search ends (step S116 in FIG. 6: YES), the lane candidate point detection conversion process (step S10), which is the first process of the basic flow shown in FIG. 3, ends.
次に、車線検出部93は、基本フローの第2プロセスである車線直線検出処理(ステップS20)に移行する。
Next, the
車線検出部93は、前記ハフ変換で得られた右車線側探索領域Srおよび左車線側探索領域Slの各a−b平面から計数値が大きな単数または複数の升目をそれぞれ抽出し、図17や図18に示すようなピーク直線r1、r2、l1、l2をそれぞれ抽出するようになっている。
The
車線検出部93は、抽出された複数のピーク直線のうち下記の選択条件に適合するものを棄却し、ピーク直線が1本に絞られるまで右向き探索および左向き探索の各場合についてそれぞれ選択を行うようになっている。
The
[選択条件]
条件9:所定の前方距離におけるピーク直線の位置が、自車両の中心から換算した車幅の位置より内側に存在すること。ただし、連続して車線位置が検出されている場合には前回検出された車線位置からの変化量を用いて所定の閾値以内であれば条件9は適用しない。
条件10:自車両の前記推定軌跡Lestとの平行度が一定の閾値より大きいこと。
条件11:図17および図18に一点破線Ldで表される所定の前方距離における自車両の中心からの左右差距離が規定値far_th以上に遠いピーク直線と規定値near_th以下のピーク直線がある場合の規定値far_th以上のピーク直線であること。ただし、far_th>near_th。
条件12:前回検出された車線位置や幅から推定した車線推定中心位置に最も近いピーク直線を残すこと。
[Selection condition]
Condition 9: The position of the peak straight line at a predetermined forward distance exists inside the position of the vehicle width converted from the center of the host vehicle. However, when the lane position is continuously detected, the
Condition 10: Parallelism with the estimated trajectory Lest of the host vehicle is larger than a certain threshold value.
Condition 11: When there is a peak straight line in which the left-right difference distance from the center of the vehicle at a predetermined forward distance represented by the one-dot broken line Ld in FIGS. 17 and 18 is more than a specified value far_th and a peak straight line less than a specified value near_th The peak straight line is more than the specified value far_th. However, far_th> near_th.
Condition 12: A peak straight line closest to the lane estimation center position estimated from the previously detected lane position and width is left.
車線検出部93は、このようにして右車線側探索領域Srおよび左車線側探索領域Slで抽出されたピーク直線から車線位置としてふさわしい直線を表す左右のピーク直線r1、l1をそれぞれ図19に示すような車線直線r1、l1として1本ずつ選択して、図3の車線直線検出処理(ステップS20)を終了するようになっている。
The
車線検出部93は、続いて、基本フローの第3プロセスである車線位置検出処理(ステップS30)に移行する。車線位置検出処理では、前記車線直線検出処理で得られた車線直線r1、l1を基準にして自車両の左右に存在する直線状または曲線状の車線を検出するようになっている。
Subsequently, the
具体的には、車線検出部93は、前記車線候補点検出変換処理と同様に、基準画像Tにおけるj座標一定の1画素幅の水平ラインj上を右向きおよび左向きにそれぞれ走査しながら処理を行う。まず、右車線直線r1或いは左車線直線l1を基準として各直線とのi方向の差が閾値以内の車線候補点を車線ポジションとして所定の個数に達するまで記録する。
Specifically, the
車線検出部93は、車線直線r1、l1上或いはその近傍に車線ポジションを前記所定の個数記録すると、その上方の水平ラインjでは、車線直線r1、l1にかかわらず、最後に検出された車線ポジションを基準として下記の要領で車線を追い、車線がカーブしている場合にもそのカーブに追随して車線ポジションを検出していくようになっている。
When the
すなわち、車線検出部93は、所定個数の車線ポジションが記録されると、その上方の水平ラインjで次に検出された車線候補点と所定個数の最後に検出された車線ポジションとのi方向、j方向の変位が規定値以内か否かを判断する。そして、規定値以内であると判断すると、その車線候補点を車線ポジションとして記録する。
That is, when a predetermined number of lane positions are recorded, the
以後同様にして、図19(A)に示されるように、水平ラインj上で車線候補点を検出すると、前回検出された車線ポジションaとのi方向、j方向の変位が規定値以内か否かを判断し、規定値以内であると判断すると、今回検出した車線候補点を車線ポジションbとして記録していく。 Thereafter, similarly, as shown in FIG. 19A, when a lane candidate point is detected on the horizontal line j, whether or not the displacement in the i direction and the j direction with respect to the previously detected lane position a is within a specified value. If it is determined that it is within the specified value, the lane candidate point detected this time is recorded as the lane position b.
また、水平ラインj上に車線候補点が検出されて、前回検出された車線ポジションとのi方向、j方向の変位が規定値以内でない場合も、前回までに検出した車線ポジションを延長した直線、すなわち、図19(B)では車線ポジションbと車線ポジションaとを結ぶ直線からのi方向の変位が規定値以内であれば、今回検出した車線候補点を車線ポジションc、d、…として記録する。 In addition, when a lane candidate point is detected on the horizontal line j and the displacement in the i direction and the j direction with respect to the previously detected lane position is not within the specified value, a straight line obtained by extending the previously detected lane position, That is, in FIG. 19B, if the displacement in the i direction from the straight line connecting the lane position b and the lane position a is within a specified value, the detected lane candidate point is recorded as the lane position c, d,. .
車線検出部93は、左右の車線間の実空間上の間隔すなわち道幅を確認しつつ水平ラインjを基準画像Tの上方にずらしながら順次車線ポジションを検出して、最終的に図20に示すように、自車両の左右に車線位置LR、LLを検出するようになっている。このようにして、図3の車線位置検出処理(ステップS30)が終了する。
The
車線検出部93は、続いて、基本フローの第4プロセスである検出モード切替処理(ステップS40)に移行する。この検出モード切替は、次回の検出処理のための前処理をなすものである。
Subsequently, the
車線検出部93は、検出モード切替処理(ステップS40)においては、図21に示すように、まず、現在の検出モードが太い車線検出モードか否かを判断し(ステップS401)、太い車線検出モードであれば(ステップS401:YES)、前記車線候補点検出変換処理の太い標示数カウント処理(ステップS117)でカウントした自車両の前方約10mから20mの範囲内における太い標示に対応する車線候補点の数が閾値以上か否かを判断する(ステップS402)。閾値は、例えば6に適宜設定される。
In the detection mode switching process (step S40), the
そして、太い標示に対応する車線候補点の数が閾値以上であれば(ステップS402:YES)、今回の検出処理から次回の検出処理までの間に自車両が前進する距離rを算出する(ステップS403)。距離rは、今回の処理時における車速Vと処理サイクルΔtとの積として算出される。 If the number of lane candidate points corresponding to the thick marking is equal to or greater than the threshold (step S402: YES), the distance r by which the host vehicle advances between the current detection process and the next detection process is calculated (step S402). S403). The distance r is calculated as the product of the vehicle speed V and the processing cycle Δt during the current processing.
さらに、前記検出車線幅閾値変更処理(ステップS121)において、現在の検出モードが太い車線検出モードである場合の検出車線幅閾値Wthdの切り替えの基準となる前記所定距離R2を、現在の値から前記自車両が前進する距離rを減算することで算出する(ステップS404)。すなわち、検出車線幅閾値Wthdの切り替えの基準となる所定距離R2を自車両が前進した分だけ短くする。 Further, in the detected lane width threshold value changing process (step S121), the predetermined distance R2 serving as a reference for switching the detected lane width threshold value Wthd when the current detection mode is the thick lane detection mode is determined from the current value. Calculation is performed by subtracting the distance r by which the host vehicle moves forward (step S404). That is, the predetermined distance R2 that is a reference for switching the detected lane width threshold Wthd is shortened by the amount of advance of the host vehicle.
また、現在の検出モードが太い車線検出モードであるが、太い標示に対応する車線候補点の数が閾値より少なければ(ステップS402:NO)、検出モードを標準検出モードに切り替えてセットする(ステップS405)。 If the current detection mode is a thick lane detection mode, but the number of lane candidate points corresponding to the thick marking is less than the threshold (step S402: NO), the detection mode is switched to the standard detection mode and set (step S402). S405).
一方、現在の検出モードが太い車線検出モードではなく標準検出モードである場合に(ステップS401:NO)、太い標示に対応する車線候補点の数が閾値より少なければ(ステップS406:NO)、そのまま標準検出モードとする。 On the other hand, when the current detection mode is not the thick lane detection mode but the standard detection mode (step S401: NO), if the number of lane candidate points corresponding to the thick marking is less than the threshold value (step S406: NO), it remains as it is. Set to standard detection mode.
また、現在の検出モードが標準検出モードである場合に、太い標示に対応する車線候補点の数が閾値以上であれば(ステップS406:YES)、検出モードを太い車線検出モードに切り替えてセットし(ステップS407)、所定距離R2を基準距離R0にセットするようになっている(ステップS408)。基準距離R0は例えば20mや18m、16m等に適宜設定される。 Further, when the current detection mode is the standard detection mode and the number of lane candidate points corresponding to the thick marking is equal to or greater than the threshold (step S406: YES), the detection mode is switched to the thick lane detection mode and set. (Step S407), the predetermined distance R2 is set to the reference distance R0 (Step S408). The reference distance R0 is appropriately set to 20 m, 18 m, 16 m, etc., for example.
車線検出部93は、横断歩道と自車両との距離R1が前記距離Runseenより大きければ(ステップS409:YES)、今回の検出処理から次回の検出処理までの間に自車両が前進する距離rを算出し(ステップS410)或いは前記ステップS403で距離rを算出していればその値を用い、距離R1を現在の値から自車両が前進した距離r分だけ短くして(ステップS411)、横断歩道を追跡するようになっている。
If the distance R1 between the pedestrian crossing and the host vehicle is larger than the distance Runseen (step S409: YES), the
このようにして、図3の検出モード切替処理(ステップS40)が終了する。 In this way, the detection mode switching process (step S40) in FIG. 3 ends.
次に、本実施形態に係る車線検出装置1の作用について説明する。 Next, the operation of the lane detector 1 according to this embodiment will be described.
検出手段9における初期状態においては、検出モードは標準検出モードであり検出車線幅閾値Wthdは本実施形態では30cmに設定されている。従って、この標準検出モードでは、規格が10〜15cmとされている通常の1本の車線は検出されるが、45〜50cm間隔で繰り返される横断歩道のゼブラ模様のペイント部分は検出されない。 In the initial state of the detection means 9, the detection mode is the standard detection mode, and the detection lane width threshold Wthd is set to 30 cm in this embodiment. Therefore, in this standard detection mode, a normal lane having a standard of 10 to 15 cm is detected, but a zebra pattern paint portion of a pedestrian crossing repeated at intervals of 45 to 50 cm is not detected.
しかし、このように検出車線幅閾値Wthdを狭く設定したままでは、例えば、図22に示すような高速道路の合流地点等に標示された太い破線状の標示BLを検出できない。 However, if the detection lane width threshold value Wthd is set to be narrow as described above, for example, a thick broken-line sign BL indicated at a junction of an expressway as shown in FIG. 22 cannot be detected.
そこで、本実施形態では、車線候補点検出変換処理(ステップS10)の検出車線幅閾値変更処理(ステップS121)で、高速道路を走行中であることを検出した場合(ステップS122:YES)や横断歩道を検出していない状態で高速道路を走行している可能性が高い場合(ステップS128:YES)には、検出車線幅閾値Wthdが例えば55cm等に拡大される。そのため、そのような太い破線状の標示BLに対応する車線候補点を確実に検出することができる。 Therefore, in the present embodiment, when the detected lane width threshold value changing process (step S121) of the lane candidate point detection and conversion process (step S10) is detected (step S122: YES) or crossing is detected. When there is a high possibility that the vehicle is traveling on a highway without detecting a sidewalk (step S128: YES), the detected lane width threshold Wthd is enlarged to 55 cm, for example. Therefore, a lane candidate point corresponding to such a thick broken-line marking BL can be reliably detected.
なお、この場合、車線候補点検出変換処理(ステップS10)の太い標示数カウント処理(ステップS117)で、標示BLが太い標示として認識されると、検出モード切替処理(ステップS40)で検出モードが標準検出モードから太い車線検出モードに切り替わる。しかし、検出車線幅閾値変更処理(ステップS121)では、検出モードの切り替えにかかわらず高速道路を走行中であるかその可能性が高ければ検出車線幅閾値Wthdが拡大されるから、高速道路を走行中であるかその可能性が高い場合には、各検出処理において前記標示BLに対応する車線候補点および車線位置が検出される。 In this case, when the sign BL is recognized as a thick sign in the thick sign count process (step S117) in the lane candidate point detection conversion process (step S10), the detection mode is changed in the detection mode switching process (step S40). The standard detection mode is switched to the thick lane detection mode. However, in the detected lane width threshold value changing process (step S121), the detected lane width threshold value Wthd is increased if the vehicle is traveling on the highway or its possibility is high regardless of the detection mode switching. If the vehicle is in the middle or the possibility is high, a lane candidate point and a lane position corresponding to the marking BL are detected in each detection process.
また、高速道路には横断歩道はないから、高速道路を走行中であることが検出されれば横断歩道の検出結果を待たずに無条件に検出車線幅閾値Wthdを拡大してよい(ステップS122、S123)。 In addition, since there is no pedestrian crossing on the highway, if it is detected that the vehicle is traveling on the highway, the detection lane width threshold Wthd may be unconditionally expanded without waiting for the detection result of the pedestrian crossing (step S122). , S123).
しかし、自車両の車速V等から高速道路を走行している可能性が高くても、高速道路を走行中であることが確実に検出されていない以上、一般道を高速で走行している可能性が残る。そのため、本実施形態では、横断歩道を検出していない場合に限って高速道路を走行中である可能性が高いか否かの判断を行うようになっている(ステップS124、S127、S128)。 However, even if there is a high possibility that the vehicle is traveling on a highway due to the vehicle speed V or the like of the host vehicle, it is possible to travel on a general road at high speed as long as it is not reliably detected that the vehicle is traveling on the highway. Sex remains. Therefore, in this embodiment, it is determined whether or not there is a high possibility that the vehicle is traveling on a highway only when no pedestrian crossing is detected (steps S124, S127, and S128).
一方、検出車線幅閾値Wthdが狭く設定された標準検出モードでは、例えば、図23に示すような3本程度の車線が並列に標示された車道中央線を表す車線TLを検出することができない。 On the other hand, in the standard detection mode in which the detection lane width threshold value Wthd is set narrow, for example, it is not possible to detect the lane TL representing the roadway center line in which about three lanes as shown in FIG.
そこで、本実施形態では、まず、車線候補点検出変換処理(ステップS10)の太い標示数カウント処理(ステップS117)で、自車両MCの前方約10mから約20mの範囲で、標準検出モードで行われる今回の検出処理では車線候補点としては削除されてしまう太い標示に対応する車線候補点の数をカウントして太い標示を検出する。 Therefore, in this embodiment, first, in the thick sign number count process (step S117) of the lane candidate point detection conversion process (step S10), the standard detection mode is performed in the range of about 10 m to about 20 m ahead of the host vehicle MC. In this detection process, the number of lane candidate points corresponding to thick markings that are deleted as lane candidate points is counted to detect thick markings.
そして、太い標示に対応する車線候補点の数が閾値以上であれば、検出モード切替処理(ステップS40)で検出モードが太い車線検出モードに切り替わり(ステップS407)、検出車線幅閾値Wthdの切り替えの基準となる所定距離R2が基準距離R0に設定される(ステップS408)。 If the number of lane candidate points corresponding to the thick marking is equal to or greater than the threshold, the detection mode is switched to the thick lane detection mode (step S407) in the detection mode switching process (step S40), and the detection lane width threshold Wthd is switched. The reference predetermined distance R2 is set to the reference distance R0 (step S408).
そして、次回の検出処理では、車線候補点検出変換処理(ステップS10)の検出車線幅閾値変更処理(ステップS121)で、太い車線検出モードであるから(ステップS129:YES)、車線候補点の探索を行っている水平ラインjの実空間上における自車両MCからの距離が所定距離R2すなわちこの場合は基準距離R0以内であれば(ステップS130:YES)、検出車線幅閾値Wthdは例えば30cmに狭く設定される(ステップS126)。 In the next detection process, since the detected lane width threshold value changing process (step S121) of the lane candidate point detection conversion process (step S10) is the thick lane detection mode (step S129: YES), the lane candidate point is searched. If the distance from the host vehicle MC in the real space of the horizontal line j that is performing is a predetermined distance R2, that is, within the reference distance R0 in this case (step S130: YES), the detected lane width threshold Wthd is set to 30 cm, for example It is set narrower (step S126).
水平ラインjの実空間上における自車両MCからの距離が基準距離R0以内の範囲では、図23に示すように車線幅は狭いから、検出車線幅閾値Wthdが狭くても水平ラインj上の探索で左右の車線位置を検出することができる。 Since the lane width is narrow as shown in FIG. 23 when the distance from the host vehicle MC in the real space of the horizontal line j is within the reference distance R 0 , the horizontal line j is on the horizontal line j even if the detected lane width threshold Wthd is narrow. The left and right lane positions can be detected by searching.
また、水平ラインjと自車両MCとの距離が基準距離R0以遠の範囲では(ステップS130:NO)、車線幅が幅広になっているから、検出車線幅閾値Wthdを拡大することで(ステップS123)、水平ラインj上の探索で幅広となった車線の位置をも検出することが可能となる。逆の言い方をすれば、このように的確に幅広の車線を検出できるように基準距離R0が設定される。 Further, in the range where the distance between the horizontal line j and the host vehicle MC is greater than the reference distance R0 (step S130: NO), the lane width is wide, so that the detected lane width threshold Wthd is increased (step S123), it becomes possible to detect the position of the lane that has become wide in the search on the horizontal line j. In other words, the reference distance R0 is set so that a wide lane can be accurately detected.
また、自車両MCの走行により、その次の回の検出処理では自車両MCが前進する。本装置の処理サイクルをΔtとすれば、自車両MCは現在の車速VとΔtとを乗算したV・Δtだけ前進する。これを自車両MCの静止系で見た場合、図24に示すように、太い車線TLが自車両MCにV・Δtだけ接近する。 In addition, as the host vehicle MC travels, the host vehicle MC moves forward in the next detection process. If the processing cycle of this apparatus is Δt, the host vehicle MC moves forward by V · Δt obtained by multiplying the current vehicle speed V by Δt. When this is viewed in the stationary system of the host vehicle MC, as shown in FIG. 24, the thick lane TL approaches the host vehicle MC by V · Δt.
そのため、本実施形態では、前回の車線位置検出が終了した時点で、次回の検出処理のための前処理として行われる検出モード切替処理(ステップS40)で、自車両の車速Vと処理サイクルΔtから自車両MCが前進した距離r=V・Δtを算出し(ステップS403)、現在設定されている前記所定距離R2から前記距離rを減算する(ステップS404)。図24の例で言えば、次回の検出処理のために、現在所定距離R2として設定されている基準距離R0からr=V・Δtを減算して所定距離R2を設定する。 Therefore, in the present embodiment, at the time when the previous lane position detection is completed, the detection mode switching process (step S40) performed as a pre-process for the next detection process is performed from the vehicle speed V of the host vehicle and the processing cycle Δt. The distance r = V · Δt traveled by the host vehicle MC is calculated (step S403), and the distance r is subtracted from the currently set predetermined distance R2 (step S404). In the example of FIG. 24, for the next detection process, the predetermined distance R2 is set by subtracting r = V · Δt from the reference distance R0 currently set as the predetermined distance R2.
このようにして、各検出処理ごとに車速Vを測定して所定距離R2からr=V・Δtを減算していくことで、検出車線幅閾値Wthdを切り替える位置を適切に自車両側にずらしながら車線位置を的確に検出することが可能となる。 In this way, by measuring the vehicle speed V for each detection process and subtracting r = V · Δt from the predetermined distance R2, the position for switching the detected lane width threshold Wthd is appropriately shifted to the own vehicle side. It becomes possible to accurately detect the lane position.
また、横断歩道検出部92により横断歩道が検出された場合、車線候補点検出変換処理(ステップS10)の検出車線幅閾値変更処理(ステップS121)で、自車両から横断歩道までの距離R1が50に設定され(ステップS125)、検出車線幅閾値Wthdが例えば30cmに狭く設定される(ステップS126)。
If a pedestrian crossing is detected by the pedestrian
そして、横断歩道検出部92により横断歩道が検出されなくなった後も、検出モード切替処理(ステップS40)において横断歩道と自車両との距離R1が前記距離Runseenより大きいうちは(ステップS409:YES)、距離R1を自車両が前進した距離r分だけ短くしていき(ステップS411)、横断歩道と自車両との距離R1が前記距離Runseen以下(ステップS409:NO)になるまで横断歩道を追跡する。そしてその間(ステップS127:YES)、検出車線幅閾値Wthdが例えば30cmに狭く設定され続ける(ステップS126)。
Even after the pedestrian
そのため、横断歩道のゼブラ模様のペイント部分は、横断歩道が基準画像Tから見えなくなるまで検出されない。 Therefore, the zebra pattern paint portion of the pedestrian crossing is not detected until the pedestrian crossing is not visible from the reference image T.
以上のように、本実施形態に係る車線検出装置1によれば、自車両が高速道路を走行している或いは走行している可能性が高い等の自車両の走行環境や、道路上に横断歩道が標示されている等の道路環境にあわせて検出車線幅閾値Wthdを拡大させたり縮小させたりして適切に設定することで、不要な標示は適切に排除し、必要な標示は的確に検出して車線候補点を検出することが可能となる。 As described above, according to the lane detection device 1 according to the present embodiment, the traveling environment of the host vehicle such as the host vehicle traveling on the highway or having a high possibility of traveling, or crossing on the road. By appropriately setting the detection lane width threshold Wthd by enlarging or reducing it according to the road environment where the sidewalk is marked, unnecessary signs are properly excluded, and necessary signs are detected accurately. Thus, lane candidate points can be detected.
そのため、自車両の左右の車線位置を的確に検出することが可能となる。 Therefore, it is possible to accurately detect the left and right lane positions of the host vehicle.
具体的には、本実施形態に係る車線検出装置1によれば、通常の標準的な走行状態においては、車線幅の規格が10〜15cmとされている通常の1本の連続線状或いは破線状の車線を検出するように、検出車線幅閾値Wthdは例えば30cmに設定される。このように比較的狭く設定されることで、車線候補点の誤検出を防止することが可能となる。 Specifically, according to the lane detection device 1 according to the present embodiment, in a normal standard traveling state, a normal single continuous line or broken line having a lane width standard of 10 to 15 cm. The detected lane width threshold Wthd is set to 30 cm, for example, so as to detect a lane-like lane. Thus, by setting it comparatively narrow, it becomes possible to prevent the erroneous detection of a lane candidate point.
一方、図23や図24に示したように、自車両MCの前方約10mから約20mの範囲で、幅広の車線や標示を検出した場合には、検出車線幅閾値Wthdを例えば55cmに拡大することで、そのような幅広の車線等を適切に検出することが可能となる。 On the other hand, as shown in FIGS. 23 and 24, when a wide lane or sign is detected in the range of about 10 m to about 20 m ahead of the host vehicle MC, the detected lane width threshold Wthd is increased to, for example, 55 cm. Thus, such a wide lane or the like can be appropriately detected.
また、その際、検出車線幅閾値Wthdを、自車両から見て基準距離R0以内の基準画像Tの領域で水平ラインj上を探索する場合には狭く設定し、基準距離R0よりも遠い領域で水平ラインj上を探索する場合には広く設定することで、通常の1本の車線が存在する領域では検出車線幅閾値Wthdを狭く、幅広の車線等が存在する領域では検出車線幅閾値Wthdを広くすることができる。 At this time, the detected lane width threshold value Wthd is set to be narrow when searching on the horizontal line j in the region of the reference image T within the reference distance R 0 when viewed from the host vehicle, and is farther than the reference distance R 0. When searching on the horizontal line j in a region, the detection lane width threshold Wthd is narrow in the region where one normal lane exists, and the detection lane width threshold in the region where a wide lane exists. Wthd can be widened.
そのため、通常の1本の車線が存在する領域では車線候補点の誤検出を防止し、幅広の車線等が存在する領域ではそのような幅広の車線等を適切に検出することが可能となる。 Therefore, it is possible to prevent erroneous detection of lane candidate points in an area where one normal lane exists, and to appropriately detect such a wide lane in an area where a wide lane exists.
さらに、当初基準距離R0に設定される所定距離Rを自車両の走行距離rに応じて短縮することで、前記のように基準画像Tの2つの領域で異なる検出車線幅閾値Wthdを、自車両の走行にあわせて適切に設定することが可能となり、より的確に前記効果を奏することが可能となる。 Furthermore, by reducing the predetermined distance R initially set to the reference distance R 0 according to the travel distance r of the host vehicle, the detected lane width threshold Wthd that differs between the two regions of the reference image T as described above can be set. It is possible to set appropriately according to the running of the vehicle, and it is possible to achieve the effect more accurately.
また、高速道路では横断歩道は存在しないから、例えば基準画像Tの全域にわたって検出車線幅閾値Wthdを広く設定することで、図22に示したような高速道路の合流地点等に標示される太い破線状の標示BLを的確に検出することが可能となり、自車両の左右の車線位置LR、LLを的確に検出することが可能となる。 Further, since there is no pedestrian crossing on the expressway, for example, by setting the detection lane width threshold Wthd widely over the entire area of the reference image T, a thick broken line shown at the junction of the expressway as shown in FIG. It is possible to accurately detect the sign BL of the shape, and it is possible to accurately detect the left and right lane positions LR and LL of the host vehicle.
また、一般道において、横断歩道が検出された場合には、検出車線幅閾値Wthdを狭く設定することで、横断歩道を誤って車線として検出して従来例のように自車両の左右の車線位置LR、LLを誤検出することを防止することが可能となる。 Further, when a pedestrian crossing is detected on a general road, by setting the detection lane width threshold Wthd to be narrow, the pedestrian crossing is erroneously detected as a lane and the left and right lane positions of the host vehicle are detected as in the conventional example. It is possible to prevent erroneous detection of LR and LL.
なお、基準画像Tのうち、横断歩道が存在する領域については車線候補点の検出を行わず、他の領域について本実施形態に係る車線位置検出を行うように構成することも可能である。 It should be noted that, in the reference image T, it is possible to configure so that the lane candidate point is not detected for the region where the pedestrian crossing exists, and the lane position detection according to the present embodiment is performed for the other region.
また、図25に示すように、自車両の前方約10mから20mの範囲で対応する車線候補点の数をカウントされる太い標示が、例えば自車両の進行方向における横断歩道の一般的な長さ以上連続して検出された場合、その太い標示は、横断歩道のゼブラ模様のペイント部分ではなく、黄色や白色の3本等の車線が並列に標示された車道中央線であると判断できる。 In addition, as shown in FIG. 25, a thick sign for counting the number of corresponding lane candidate points in the range of about 10 m to 20 m ahead of the host vehicle is, for example, the general length of the pedestrian crossing in the traveling direction of the host vehicle. When detected continuously, the thick marking is not the zebra pattern paint portion of the pedestrian crossing, but can be determined to be the roadway center line in which three lanes such as yellow and white are marked in parallel.
そのため、このような場合に検出車線幅閾値Wthdを拡大するように構成することも可能である。このように構成すれば、横断歩道のゼブラ模様のペイント部分ではない幅広の標示を確実に検出できるようになり、的確に幅広の車道中央線を検出することが可能となる。 For this reason, it is possible to increase the detection lane width threshold Wthd in such a case. If comprised in this way, it will become possible to detect reliably the wide sign which is not the zebra pattern paint part of a pedestrian crossing, and it becomes possible to detect a wide roadway center line exactly.
1 車線位置検出装置
2 撮像手段
6 画像処理手段
9 検出手段
91 高速道路走行検出部
92 横断歩道検出部
p1ij 輝度値
Lij 距離
T 基準画像
LR、LL 車線位置
Wthd 検出車線幅閾値
MC 自車両
BL 幅広の標示
TL 車道中央線
R2 自車両前方の所定距離
Sr、Sl 探索領域
r 自車両の走行距離
V 車速
DESCRIPTION OF SYMBOLS 1 Lane
Claims (9)
前記撮像された一対の画像に基づいて少なくとも一方の画像の各画素について実空間における距離を算出する画像処理手段と、
前記一方の画像について前記輝度値および前記距離に基づいて車線の一方のエッジ部分に対応する画素を車線候補点として検出し、検出した車線候補点に基づいて車線位置を検出する検出手段と
を備え、
前記検出手段は、前記車線候補点とそれに対応する車線の反対側のエッジ部分との実空間上の距離を算出し、前記距離が検出車線幅閾値以下の場合にのみ前記検出した車線候補点を前記車線位置の検出に用い、
かつ、前記検出車線幅閾値は、自車両の走行環境または道路環境により可変とされていることを特徴とする車線検出装置。 Imaging means for imaging a landscape including a road ahead of the host vehicle and outputting a pair of images having a luminance value for each pixel;
Image processing means for calculating a distance in real space for each pixel of at least one image based on the pair of captured images;
Detecting means for detecting a pixel corresponding to one edge portion of the lane as a lane candidate point based on the luminance value and the distance for the one image, and detecting a lane position based on the detected lane candidate point; ,
The detection means calculates a distance in real space between the lane candidate point and an edge portion on the opposite side of the lane corresponding to the lane candidate point, and the detected lane candidate point is detected only when the distance is equal to or smaller than a detected lane width threshold. Used to detect the lane position,
And the said detection lane width threshold value is made variable with the driving | running | working environment or road environment of the own vehicle, The lane detection apparatus characterized by the above-mentioned.
前記検出手段は、前記高速道路走行検出手段により自車両が高速道路を走行中であると検出された場合には、前記検出車線幅閾値を1本の車線幅の規格より幅広の標示を検出可能な値に拡大することを特徴とする請求項1から請求項4のいずれか一項に記載の車線検出装置。 Highway running detection means for detecting whether or not the host vehicle is running on a highway,
The detecting means can detect a sign that is wider than the standard of one lane width for the detected lane width threshold when the highway running detecting means detects that the host vehicle is running on the highway. The lane detection device according to any one of claims 1 to 4, wherein the lane detection device expands to a large value.
を備え、
前記検出手段は、前記高速道路走行検出手段により自車両が高速道路を走行中であるとは検出されず、前記横断歩道検出手段により横断歩道が検出された場合には、前記検出車線幅閾値を前記1本の車線幅の規格に対応する値に設定することを特徴とする請求項5に記載の車線検出装置。 Pedestrian crossing detection means for detecting whether there is a pedestrian crossing in front of the vehicle,
The detection means does not detect that the host vehicle is traveling on an expressway by the expressway running detection means, and if the pedestrian crossing is detected by the pedestrian crossing detection means, the detection lane width threshold is set. 6. The lane detection device according to claim 5, wherein the lane detection device is set to a value corresponding to the standard of the one lane width.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006085142A JP2007264712A (en) | 2006-03-27 | 2006-03-27 | Lane detector |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006085142A JP2007264712A (en) | 2006-03-27 | 2006-03-27 | Lane detector |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007264712A true JP2007264712A (en) | 2007-10-11 |
Family
ID=38637691
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006085142A Pending JP2007264712A (en) | 2006-03-27 | 2006-03-27 | Lane detector |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007264712A (en) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009229182A (en) * | 2008-03-21 | 2009-10-08 | Acreeg Corp | Feature-on-image measurement method, display method, and measurement apparatus |
| JP2010146470A (en) * | 2008-12-22 | 2010-07-01 | Denso Corp | Traveling-lane detector and traveling-lane detection program |
| JP2010271162A (en) * | 2009-05-21 | 2010-12-02 | Mitsubishi Electric Corp | Road lane data generator, method of generating road lane data, and road lane data generation program |
| JP2011118509A (en) * | 2009-12-01 | 2011-06-16 | Fuji Heavy Ind Ltd | Road recognition device |
| US8600112B2 (en) | 2010-03-15 | 2013-12-03 | Aisin Seiki Kabushiki Kaisha | Crosswalk detection device, crosswalk detection method and recording medium |
| JP2014186646A (en) * | 2013-03-25 | 2014-10-02 | Fuji Heavy Ind Ltd | Vehicle-mounted white line recognition device |
| CN109478336A (en) * | 2016-07-21 | 2019-03-15 | 五十铃自动车株式会社 | Image processing apparatus and image processing method |
| CN111260918A (en) * | 2018-12-03 | 2020-06-09 | 罗伯特·博世有限公司 | Method and server unit for locating a vehicle precisely to the lane |
| CN112819711A (en) * | 2021-01-20 | 2021-05-18 | 电子科技大学 | Monocular vision-based vehicle reverse positioning method utilizing road lane line |
| JP2021157486A (en) * | 2020-03-27 | 2021-10-07 | 日立造船株式会社 | Detection method of railroad rail with image |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003168123A (en) * | 2001-11-30 | 2003-06-13 | Toyota Central Res & Dev Lab Inc | Traffic lane boundary decision apparatus |
| JP2005283219A (en) * | 2004-03-29 | 2005-10-13 | Clarion Co Ltd | Vehicle traveling road determination method, vehicle traveling road determination device and navigation system |
| JP2005339468A (en) * | 2004-05-31 | 2005-12-08 | Mitsubishi Electric Corp | On-vehicle road marking detector |
-
2006
- 2006-03-27 JP JP2006085142A patent/JP2007264712A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003168123A (en) * | 2001-11-30 | 2003-06-13 | Toyota Central Res & Dev Lab Inc | Traffic lane boundary decision apparatus |
| JP2005283219A (en) * | 2004-03-29 | 2005-10-13 | Clarion Co Ltd | Vehicle traveling road determination method, vehicle traveling road determination device and navigation system |
| JP2005339468A (en) * | 2004-05-31 | 2005-12-08 | Mitsubishi Electric Corp | On-vehicle road marking detector |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009229182A (en) * | 2008-03-21 | 2009-10-08 | Acreeg Corp | Feature-on-image measurement method, display method, and measurement apparatus |
| JP2010146470A (en) * | 2008-12-22 | 2010-07-01 | Denso Corp | Traveling-lane detector and traveling-lane detection program |
| JP2010271162A (en) * | 2009-05-21 | 2010-12-02 | Mitsubishi Electric Corp | Road lane data generator, method of generating road lane data, and road lane data generation program |
| JP2011118509A (en) * | 2009-12-01 | 2011-06-16 | Fuji Heavy Ind Ltd | Road recognition device |
| US8600112B2 (en) | 2010-03-15 | 2013-12-03 | Aisin Seiki Kabushiki Kaisha | Crosswalk detection device, crosswalk detection method and recording medium |
| JP2014186646A (en) * | 2013-03-25 | 2014-10-02 | Fuji Heavy Ind Ltd | Vehicle-mounted white line recognition device |
| CN109478336A (en) * | 2016-07-21 | 2019-03-15 | 五十铃自动车株式会社 | Image processing apparatus and image processing method |
| CN111260918A (en) * | 2018-12-03 | 2020-06-09 | 罗伯特·博世有限公司 | Method and server unit for locating a vehicle precisely to the lane |
| JP2021157486A (en) * | 2020-03-27 | 2021-10-07 | 日立造船株式会社 | Detection method of railroad rail with image |
| JP7481872B2 (en) | 2020-03-27 | 2024-05-13 | 日立造船株式会社 | How to detect railroad tracks using images |
| CN112819711A (en) * | 2021-01-20 | 2021-05-18 | 电子科技大学 | Monocular vision-based vehicle reverse positioning method utilizing road lane line |
| CN112819711B (en) * | 2021-01-20 | 2022-11-22 | 电子科技大学 | Monocular vision-based vehicle reverse positioning method utilizing road lane line |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4659631B2 (en) | Lane recognition device | |
| US9569675B2 (en) | Three-dimensional object detection device, and three-dimensional object detection method | |
| JP2007264712A (en) | Lane detector | |
| JP4568637B2 (en) | Road recognition device | |
| JP4676373B2 (en) | Peripheral recognition device, peripheral recognition method, and program | |
| JP4638369B2 (en) | Lane position detector | |
| JP6344638B2 (en) | Object detection apparatus, mobile device control system, and object detection program | |
| KR101241651B1 (en) | Image recognizing apparatus and method, and position determining apparatus, vehicle controlling apparatus and navigation apparatus using the image recognizing apparatus or method | |
| US20080013789A1 (en) | Apparatus and System for Recognizing Environment Surrounding Vehicle | |
| JP4714104B2 (en) | Object tilt detection device | |
| JP5631581B2 (en) | Road recognition device | |
| JP4901275B2 (en) | Travel guidance obstacle detection device and vehicle control device | |
| JP5561064B2 (en) | Vehicle object recognition device | |
| JP2003296736A (en) | Device for detecting obstacle and method thereof | |
| JP6150164B2 (en) | Information detection apparatus, mobile device control system, mobile object, and information detection program | |
| JP5180126B2 (en) | Road recognition device | |
| JP2014006885A (en) | Level difference recognition apparatus, level difference recognition method, and program for level difference recognition | |
| JP2009053818A (en) | Image processor and method thereof | |
| JP4939137B2 (en) | Lane recognition device | |
| JP2007316685A (en) | Traveling path boundary detection device and traveling path boundary detection method | |
| JP2020095622A (en) | Image processing device and image processing method | |
| JP4721278B2 (en) | Lane departure determination device, lane departure prevention device, and lane tracking support device | |
| JP4956099B2 (en) | Wall detector | |
| US20200193184A1 (en) | Image processing device and image processing method | |
| JP5888275B2 (en) | Road edge detection system, method and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081002 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100907 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110118 |