JP2006109650A - Vehicle control unit and vehicle control method - Google Patents
Vehicle control unit and vehicle control method Download PDFInfo
- Publication number
- JP2006109650A JP2006109650A JP2004294927A JP2004294927A JP2006109650A JP 2006109650 A JP2006109650 A JP 2006109650A JP 2004294927 A JP2004294927 A JP 2004294927A JP 2004294927 A JP2004294927 A JP 2004294927A JP 2006109650 A JP2006109650 A JP 2006109650A
- Authority
- JP
- Japan
- Prior art keywords
- drive motor
- limit value
- power
- battery
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
本発明は車両用制御装置及び車両制御方法に関し、特に、ドライバの意思を反映して車両が搭載する駆動系の出力を制御する車両用制御装置及び車両制御方法に関する。 The present invention relates to a vehicle control device and a vehicle control method, and more particularly, to a vehicle control device and a vehicle control method for controlling an output of a drive system mounted on a vehicle reflecting a driver's intention.
従来から、モータやエンジン等を動力源として走行する車両において、燃料電池やエンジンの制御をドライバの意思を反映して適正に行う制御技術が知られている(例えば、特許文献1参照)。特許文献1に開示された車両用制御装置では、ドライバのアクセル操作量から駆動モータの要求出力を算出し、該駆動モータ要求出力に基づき、二次電池の充電状態が目標状態に制御されるよう、燃料電池の目標発電電力を演算し、該目標発電力に基づき燃料電池システムの発電を行っている。
しかし、二次電池の充電状態或いは二次電池の温度条件に基づき、二次電池の入出力電力が制限されている場合に、通常の駆動モータ制御を行うと、バッテリ(二次電池)の過充放電を起こす可能性がある。また、該バッテリの過充放電を検出した場合には、駆動モータのトルクを制限して、バッテリの充放電電力を制限する必要があるため、結果としてドライバが要求するトルクを出力することが出来ず、所望とする加速が行えない。 However, when the input / output power of the secondary battery is limited based on the charging state of the secondary battery or the temperature condition of the secondary battery, if the normal drive motor control is performed, the battery (secondary battery) Charging / discharging may occur. In addition, when overcharge / discharge of the battery is detected, it is necessary to limit the charge / discharge power of the battery by limiting the torque of the drive motor. As a result, the torque requested by the driver can be output. Therefore, the desired acceleration cannot be performed.
本発明の第1の特徴は、車両の駆動軸へ動力を供給する駆動モータを備える車両の速度を検出する車速検出手段と、駆動モータへ電力を供給する二次電池の出力電力又は入力電力の制限値を検出する二次電池入出力制限値検出手段と、二次電池の出力電力又は入力電力の制限値及び車両の速度に基づいて、駆動モータが生成するトルクの変化量の上限値又は下限値を算出する駆動モータトルク変化量上下限値算出手段とを備える車両用制御装置であることを要旨とする。 The first feature of the present invention is vehicle speed detection means for detecting the speed of a vehicle including a drive motor that supplies power to the drive shaft of the vehicle, and output power or input power of a secondary battery that supplies power to the drive motor. Secondary battery input / output limit value detection means for detecting limit value, upper limit value or lower limit of torque change amount generated by drive motor based on output value or input power limit value of secondary battery and vehicle speed The gist of the present invention is a vehicle control device including drive motor torque change amount upper / lower limit value calculating means for calculating a value.
本発明の第2の特徴は、車両の駆動軸へ動力を供給する駆動モータを備える車両の速度を検出し、駆動モータへ電力を供給する二次電池の出力電力又は入力電力の制限値を検出し、二次電池の出力電力又は入力電力の制限値及び車両の速度に基づいて、駆動モータが生成するトルクの変化量の上限値又は下限値を算出する車両制御方法であることを要旨とする。 The second feature of the present invention is to detect the speed of a vehicle including a drive motor that supplies power to the drive shaft of the vehicle, and to detect a limit value of output power or input power of a secondary battery that supplies power to the drive motor. The vehicle control method calculates the upper limit value or the lower limit value of the amount of change in torque generated by the drive motor based on the output power or input power limit value of the secondary battery and the vehicle speed. .
本発明によれば、二次電池の入出力電力の制限値と車両の車速に基づき、駆動モータのトルク変化量の上下限値を算出することにより、二次電池の過充放電を起こすことなく、ドライバが要求するトルクを駆動モータが出力する車両用制御装置及び車両制御方法を提供することが出来る。 According to the present invention, the upper and lower limit values of the torque change amount of the drive motor are calculated based on the limit value of the input / output power of the secondary battery and the vehicle speed of the vehicle without causing overcharge / discharge of the secondary battery. The vehicle control device and the vehicle control method in which the drive motor outputs the torque required by the driver can be provided.
以下図面を参照して、本発明の実施の形態を説明する。図面の記載において同一あるいは類似の部分には同一あるいは類似な符号を付している。 Embodiments of the present invention will be described below with reference to the drawings. In the description of the drawings, the same or similar parts are denoted by the same or similar reference numerals.
図1に示すように、本発明の第1及び第2の実施の形態に係わる車両用制御装置は、その基本構成として、車両の駆動軸へ動力を供給する駆動モータを備える車両の速度を検出する車速検出部1と、駆動モータへ電力を供給する二次電池(以後、「バッテリ」という)の出力電力又は入力電力の制限値を検出する二次電池入出力制限値検出部2と、出力電力又は入力電力の制限値及び車両の速度に基づいて、駆動モータが生成するトルクの変化量の上限値又は下限値を算出する駆動モータトルク変化量上下限値算出部3とを備える。
As shown in FIG. 1, the vehicle control apparatus according to the first and second embodiments of the present invention detects the speed of a vehicle having a drive motor that supplies power to the drive shaft of the vehicle as its basic configuration. A vehicle
(第1の実施の形態)
図2に示すように、本発明の第1の実施の形態に係わる車両用制御装置は、その基本構成として、車速検出部1と、駆動モータへ電力を供給するバッテリの出力電力の制限値を検出する二次電池出力制限値検出部4と、出力電力の制限値及び車両の速度に基づいて、駆動モータが生成するトルクの変化量の上限値を算出する駆動モータトルク変化量上限値算出部5とを備える。即ち、図2の車両用制御装置を図1の車両用制御装置と比べると、図1の二次電池入出力制限値検出部2は、図2の二次電池出力制限値検出部4に相当し、図1の駆動モータトルク変化量上下限値算出部3は、図2の駆動モータトルク変化量上限値算出部5に相当する。
(First embodiment)
As shown in FIG. 2, the vehicle control apparatus according to the first embodiment of the present invention has, as its basic configuration, a limit value for the output power of the
図3に示すように、第1の実施の形態において図2に示した車両用制御装置の制御対象となる車両は、燃料電池システム16を主電源として及びバッテリ14を補助電源として搭載した燃料電池車両である。駆動モータ15が燃料電池システム16及びバッテリ14から得られる電力より生成される駆動力によって燃料電池車両は走行する。
As shown in FIG. 3, the vehicle to be controlled by the vehicle control device shown in FIG. 2 in the first embodiment is a fuel cell equipped with the
燃料電池車両は、天然ガス等の燃料を改質して得られる水素と空気中の酸素とを電気化学的に反応させて直接発電する燃料電池システム16と、燃料電池システム16から出力を取り出す駆動ユニット17と、ドライバのアクセル操作量を検出する手段としてのアクセル開度センサ19と、車両の速度を検出する手段としての車速センサ11と、駆動モータインバータ18と、駆動モータ15と、バッテリ14と、バッテリ14の充電状態を推定し、バッテリ14の出力電力又は入力電力の制限値を演算するバッテリコントローラ12と、アクセル開度センサ19が検出するアクセル開度と車速センサ11が検出する車速から駆動モータインバータ18に指令する駆動モータトルクを演算し、駆動モータ15の消費電力を推定して駆動ユニット17に指令する発電電力を演算するコントローラ13とを備える。ここで、図2の車両用制御装置と図3の燃料電池車両とを比較すると、図2の車速検出部1は図3の車速センサ11に相当し、図2の二次電池出力制限値検出部4は図3のバッテリコントローラ12に相当し、図2の駆動モータトルク変化量上限値算出部5は図3のコントローラに相当する。
The fuel cell vehicle directly generates power by electrochemically reacting hydrogen obtained by reforming a fuel such as natural gas and oxygen in the air, and driving to extract output from the fuel cell system 16
図4に示すように、図3の燃料電池システム16は、燃料ガス中の水素と酸化剤ガス中の酸素とを電気化学的に反応させて発電を行う燃料電池スタック21と、燃料電池スタック21へ供給される燃料ガスとしての水素ガスを貯蔵する水素タンク(高圧水素)29と、高圧水素29から供給される水素ガスの圧力及び流量を制御する可変バルブ24と、可変バルブ24を通過した水素ガスと燃料電池スタック21から排出された未反応の水素ガス(排水素ガス)とを混合して燃料電池スタック21の水素導入口へ供給するイジェクタ28と、燃料電池スタック21の水素ガスの排出口とイジェクタ28とを繋ぐ水素循環流路と、燃料電池スタック21の水素ガスの排出口に接続されたパージ弁26と、燃料電池スタック21へ供給される酸化剤ガスとしての空気を圧縮して燃料電池スタック21の空気導入口へ供給する酸化ガス供給装置(例えば、コンプレッサ)23と、燃料電池スタック21の空気の排出口に接続された空気の流量/圧力制御弁としてのスロットル25と、燃料電池スタック21へ供給される空気及び水素を加湿する加湿器22と、加湿器22へ純水を供給する純水供給部27と、燃料電池スタック21の空気導入口での空気圧力を検出する空気圧力センサ30と、燃料電池スタック21の水素導入口での水素圧力を検出する水素圧力センサ31と、燃料電池スタック21へ流入する空気流量を検出する空気流量センサ32と、燃料電池スタック21へ流入する水素流量を検出する水素流量センサ33と、コンプレッサ23から送出される空気の圧力を測定する空気圧力センサ36と、コンプレッサ23から送出される空気の温度を検出す温度センサ37と、燃料電池スタック21を構成するセルあるいはセル群の電圧を検出するセル電圧検出部35と、各センサの信号とセル電圧検出部35の出力を取り込み、内蔵された制御ソフトウェアに基づいて各アクチュエータを駆動する制御部34とを有する。燃料電池スタック21と電気負荷(駆動モータ15など)の間に駆動ユニット17が配置されている。
As shown in FIG. 4, the
酸化ガス供給装置23では空気が圧縮されて加湿器22へ送られ、加湿器22では純水供給部27から供給された純水で空気を加湿し、加湿された空気が燃料電池スタック21へ送り込まれる。水素系では可変バルブ24で水素ガスの流量を制御して、燃料電池スタック21の水素極内の圧力を所望の値とする、また、イジェクタ28で排水素ガスの還流量と合流し、加湿器22へ送られる。加湿器22では空気と同様に純水供給部27で供給された純水で水素を加湿し、加湿された水素が燃料電池スタック21へ送り込まれる。燃料電池スタック21では送り込まれた空気と水素を反応させて発電を行い、電流(電力)を駆動ユニット17を介して車両に搭載された外部システム(例えば、図3の駆動モータ15)へ供給する。燃料電池スタック21で反応に使用した残りの空気はスロットル25を介して燃料電池システム16外へ排出される。スロットル25では空気の圧力制御が行われる。また、反応に使用した残りの水素は燃料電池システム16外へ排出されるが、イジェクタ28によって加湿器22上流へ還流されて発電に再利用される。
In the oxidizing gas supply device 23, the air is compressed and sent to the
燃料電池スタック21の空気導入口での空気圧力を検出する空気圧力センサ30、空気導入口での空気流量を検出する空気流量センサ32、水素導入口での水素圧力を検出する水素圧力センサ31と水素導入口での水素流量を検出する水素流量センサ33、及びセル電圧検出部35からの検出値は制御部34へ読み込まれる。制御部34では、読み込んだ各値がそのときの目標発電量から決まる所定の目標値になるように、酸化ガス供給装置23、スロットル25及び可変バルブ24を制御するとともに、目標値に対して実際に実現されている水素/空気の圧力及び流量に応じて燃料電池スタック21から駆動ユニット17へ取り出す出力(電流値)を指令し制御を行う。
An air pressure sensor 30 for detecting an air pressure at the air inlet of the
次に、図5を参照して、図3の車両用制御装置による燃料電池車両の制御方法を説明する。図3の車両用制御装置は、バッテリコントローラ12から送られてきたバッテリ14の出力電力の制限値に基づき、駆動モータ15のトルク応答を補正する。以下にその詳細な手順を説明する。なお、以下の処理内容は、燃料電池システム16の運転開始時より所定時間毎(例えば10[ms]毎)に実行される。
Next, a control method of the fuel cell vehicle by the vehicle control device of FIG. 3 will be described with reference to FIG. The vehicle control device in FIG. 3 corrects the torque response of the
(イ)S01段階において車速センサ11が車速を検出し、S02段階においてアクセル開度センサ19がアクセル開度を検出し、S03段階においてバッテリコントローラ12がバッテリ14の出力電力の制限値を検出する。
(A) The vehicle speed sensor 11 detects the vehicle speed in step S01, the accelerator opening sensor 19 detects the accelerator opening in step S02, and the
(ロ)S04段階において、S01段階で検出した車速、S02段階で検出したアクセル開度及びS03段階で検出したバッテリ14の出力電力の制限値に基づき、コントローラ13が、駆動モータインバータ18に指令する駆動モータトルク指令値の変化量の上限値を補正演算する。
(B) In step S04, the
(ハ)S05段階において、S04段階で演算した駆動モータトルクの変化量の上限値に基づき、コントローラ13が、駆動モータインバータ18に指令する駆動モータ指令トルクを算出する。S06段階において、コントローラ13が、S05段階で算出した駆動モータ指令トルクを駆動モータインバータ18に指令する。以上の手順が繰り返し実行される。
(C) In step S05, the
図6を参照して、バッテリ14の充電状態(SOC)と出力電力の制限値との関係を説明する。予め実験などにより、バッテリ14の出力電力の制限値と、バッテリ14の充電状態、バッテリ14の劣化度及びバッテリ14の温度との関係を調べる。バッテリ14の充電状態が高くなるほど、バッテリ14の出力電力の制限値も高くなる。バッテリ14の劣化が進むほど、或いはバッテリ14の温度が適正温度が外れるほど、バッテリ14の出力電力の制限値は低くなる。このように、バッテリ出力電力制限値Bout [kW]は、バッテリ充電状態SOC1[%]とバッテリ劣化度及びバッテリ温度から推定される。
With reference to FIG. 6, the relationship between the state of charge (SOC) of
図7を参照して、図5のS04段階の詳細な手順を説明する。図7に示すように、S04段階はS401段階及びS402段階からなる。 With reference to FIG. 7, the detailed procedure of step S04 in FIG. 5 will be described. As shown in FIG. 7, step S04 comprises steps S401 and S402.
(A)S401段階では、S01で検出した車速VSP1 [km/h]と、S03段階で検出したバッテリ14の出力電力の制限値Bout[kW]に基づき、駆動モータ15のトルク変化量の上限値の補正係数kacc[-]を算出する。
(A) In step S401, based on the vehicle speed VSP 1 [km / h] detected in step S01 and the output power limit value B out [kW] of the
(B)S402段階では、補正前の駆動モータ15のトルク変化量の上限値に、S401段階で算出したトルク変化量の上限値の補正係数kacc[-]を積算して、補正後の駆動モータ15のトルク変化量の上限値を算出する。
(B) In step S402, the correction coefficient k acc [−] of the upper limit value of the torque change amount calculated in step S401 is added to the upper limit value of the torque change amount of the
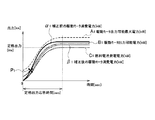
図8乃至図10(a)を参照して、図7のS401段階での駆動モータ15のトルク変化量の上限値の補正係数kacc[-]の演算方法について説明する。先ず、駆動モータ15のトルク変化量の上限値を補正する必要性について説明する。図8は、所定の車速VSP1[km/h]で駆動モータ15に最速応答を要求した場合の出力値の立ち上がりの様子を示すグラフである。
A method for calculating the correction coefficient k acc [−] of the upper limit value of the torque change amount of the
図8のプロファイルA1は、燃料電池システム16及びバッテリ14が駆動モータ15へ出力することができる最大の電力(以後、「駆動モータ出力可能最大電力」という)[kW]を示す。駆動モータ出力可能最大電力は、燃料電池スタック21が発電する電力(以後、「燃料電池発電電力」という)[kW]と、バッテリ14が出力することができる最大の電力(以後、「バッテリ最大アシスト電力」という)[kW]とを加算したものである。
A profile A 1 in FIG. 8 indicates the maximum power (hereinafter referred to as “maximum power that can be output to the drive motor”) [kW] that the
図8のプロファイルB1は、バッテリ14が出力することができる電力が図6に示した温度又は劣化度により制限される場合における、燃料電池システム16及びバッテリ14が駆動モータ15へ出力することができる電力(以後、「駆動モータ出力可能電力」という)[kW]を示す。駆動モータ出力可能電力は、燃料電池発電電力 [kW]と、S03段階で検出したバッテリ14の出力電力の制限値Bout[kW]とを加算したものである。
The profile B 1 in FIG. 8 indicates that the
図8のプロファイルC1は、燃料電池発電電力 [kW]を示す。 A profile C 1 in FIG. 8 shows fuel cell generated power [kW].
図8のプロファイルα1は、駆動モータ15の消費電力が駆動モータ出力可能最大電力(プロファイルA1)を上回らない範囲で、駆動モータ15に最速応答を要求した場合の駆動モータ15の出力を示す。プロファイルα1において設定された駆動モータ15のトルク変化量の上限値(補正前)で駆動モータ15へトルク指令を発してしまうと、図8の点P1において、駆動モータ15の出力(プロファイルα1)が、駆動モータ出力可能電力(プロファイルB1)を上回り、バッテリ14の過放電を起こす可能性がある。一方、図8のプロファイルβ1は、駆動モータ15の消費電力が駆動モータ出力可能電力(プロファイルB1)を上回らない範囲で、駆動モータ15に最速応答を要求した場合の駆動モータ15の出力を示す。図8のプロファイルβ1に示すように、駆動モータ15の消費電力が駆動モータ出力可能電力(プロファイルB1)を上回らない範囲で、駆動モータ15のトルク変化量の上限値を補正演算する。これにより、バッテリ14の過放電を回避できる。
A profile α 1 in FIG. 8 indicates the output of the
今、所定の車速VSP1[km/h]で駆動モータ15に最速応答を要求した場合について考える。バッテリ14の過放電を防止するために、駆動モータトルク指令値[Nm]が駆動モータ出力可能最大トルク[Nm] (プロファイルA1)を上回らないように駆動モータトルク指令値[Nm]のトルク変化量上限値を予め決定する必要がある(プロファイルα1)。
Consider a case where the
しかし、バッテリアシスト電力[kW]が低下している場合に、トルク変化量上限値で駆動モータトルク指令値[Nm]を算出すると、駆動モータ出力可能トルク[Nm] (プロファイルB1)を駆動モータトルク指令値[Nm]が上回り(P1)、バッテリ過放電を起こしてしまう可能性がある。 However, when the battery assist power [kW] is decreasing and the drive motor torque command value [Nm] is calculated with the torque change amount upper limit value, the drive motor output possible torque [Nm] (profile B 1 ) is used as the drive motor. The torque command value [Nm] exceeds (P 1 ), and battery overdischarge may occur.
そこで、駆動モータ出力可能トルク[Nm] (プロファイルB1)を上回らないように、トルク変化量上限値を補正して駆動モータトルク指令値[Nm]を算出する必要がある。このときのバッテリ出力電力制限値Bout、補正係数kacc[-]及び車速VSP1との関係を求める。 Therefore, it is necessary to calculate the drive motor torque command value [Nm] by correcting the torque change amount upper limit value so as not to exceed the drive motor output possible torque [Nm] (profile B 1 ). At this time, the relationship between the battery output power limit value B out , the correction coefficient k acc [−], and the vehicle speed VSP 1 is obtained.
なお、図9は、図8の縦軸を駆動モータ15のトルクに換算したグラフである。即ち、燃料電池発電電力[kW]とバッテリ最大アシスト電力[kW]を加算したもののトルク変換値を駆動モータ出力可能最大トルク[Nm]とし、バッテリアシスト電力[kW]が低下している場合に、燃料電池発電電力[kW]とバッテリ出力電力制限値[kW]を加算したもののトルク変換値を駆動モータ出力可能トルク[Nm]とする。
FIG. 9 is a graph in which the vertical axis of FIG. 8 is converted into the torque of the
図10(a)に示すように、バッテリ出力電力制限値Boutが大きくなるほど、駆動モータトルク変化量上限値の補正係数kacc[-]は大きくなる。また、車速VSP1が速くなるほど、駆動モータトルク変化量上限値の補正係数kacc[-]は小さくなる。車速センサ11が検出した車速VSP1[km/h]と、バッテリコントローラ12が検出したバッテリ出力電力制限値Bout[kW]とから、図10(a)を参照し、駆動モータトルク変化量上限値補正係数kacc[-]を算出する。
As shown in FIG. 10A, the correction coefficient k acc [−] of the drive motor torque change amount upper limit value increases as the battery output power limit value B out increases. Further, as the vehicle speed VSP 1 increases, the correction coefficient k acc [−] of the drive motor torque change upper limit value decreases. Based on the vehicle speed VSP 1 [km / h] detected by the vehicle speed sensor 11 and the battery output power limit value B out [kW] detected by the
次に、図10(b)に基づいて、車速VSP1[km/h]のときの駆動モータトルク変化量上限値は△Trqup[Nm/10msec]であることがわかる。したがって、車速VSP1[km/h]及びバッテリ出力電力制限値Bout[kW]の時の、補正後の駆動モータトルク変化量上限値△Trqup’は、(1)式から求めることができる。 Next, based on FIG. 10B, it can be seen that the upper limit value of the drive motor torque change amount at the vehicle speed VSP 1 [km / h] is ΔTrq up [Nm / 10 msec]. Accordingly, the corrected drive motor torque change upper limit value ΔTrq up ′ at the vehicle speed VSP 1 [km / h] and the battery output power limit value B out [kW] can be obtained from the equation (1). .
△Trqup’ = kacc × △Trqup [Nm/10msec] ・・・(1)
図11を参照して、S05段階における駆動モータ指令トルクの算出方法を説明する。車速センサ11が検出した車速VSP1[km/h]及びアクセル開度センサ19が検出したアクセル開度APO[deg]から、目標駆動モータトルクTrq[Nm]を求めることができる。今、アクセル操作の踏込み時間が、△T[10msec]であったとき、目標駆動モータトルク変化量△Trq[Nm]は、(2)式から求めることができる。
△ Trq up '= k acc × △ Trq up [Nm / 10msec] (1)
With reference to FIG. 11, the calculation method of the drive motor command torque in step S05 will be described. The target drive motor torque Trq [Nm] can be obtained from the vehicle speed VSP 1 [km / h] detected by the vehicle speed sensor 11 and the accelerator opening APO [deg] detected by the accelerator opening sensor 19. Now, when the accelerator operation depression time is ΔT [10 msec], the target drive motor torque change amount ΔTrq [Nm] can be obtained from the equation (2).
△Trq = Trq /△T [Nm/10msec] ・・・(2)
「目標駆動モータトルク変化量△Trq」が「補正後の駆動モータトルク変化量上限値△Trqup’」と等しい或いはより大きい場合、目標駆動モータトルクの変化量は補正後駆動モータトルク変化量上限値で制限し、それ以外であれば、ドライバの要求どおりの目標駆動モータトルク変化量として、駆動モータトルク指令値を算出する。
△ Trq = Trq / △ T [Nm / 10msec] (2)
When “target drive motor torque change amount ΔTrq” is equal to or greater than “corrected drive motor torque change amount upper limit value ΔTrq up '”, the target drive motor torque change amount is the upper limit of corrected drive motor torque change amount. Otherwise, the drive motor torque command value is calculated as the target drive motor torque change amount as requested by the driver.
一般に駆動モータ15の応答要求に対し、燃料電池システム16の発電応答は遅い。そのため、バッテリ14は、基本的に燃料電池システム16の発電応答の遅れを補償するものである。しかし、バッテリ14の充電状態(SOC)が低下した場合や、バッテリ14の熱保護を行う場合には、バッテリ14の出力電力を制限する必要があるため、通常通りの駆動モータ15の制御を行うとバッテリ14の過放電を起こしてしまう。これを防止するためには駆動モータ15のトルク制限を行う必要があり、結果として燃料電池システム16の定格発電電力及びバッテリ14の最大アシスト電力から求まる駆動モータ最大トルクを出力できない。そこで、本発明の第1の実施の形態では、バッテリ14の出力電力の制限値Boutに応じて、駆動モータ15のトルク変化量の上限値△Trqupを修正することにより、燃料電池システム16の定格発電電力及びバッテリ14の最大アシスト電力から求まる駆動モータ最大トルクが出力される。よって、二次電池(バッテリ)14の出力電力制限値が低下している場合に、駆動モータ15のトルクを過剰に制限することなく、ドライバの要求に応じた最大トルクを出力させることができる。換言すれば、車速とバッテリ14の出力電力を検出し、予めバッテリ14の過放電を引き起こさないように駆動モータ15のトルク変化量を補正することにより、ドライバが要求するトルクを駆動モータ15が出力する燃料電池車両の制御システムを提供することができる。
In general, the power generation response of the
(第2の実施の形態)
図12に示すように、本発明の第2の実施の形態に係わる車両用制御装置は、その基本構成として、車速検出部1と、車両の制動時等に駆動モータからバッテリへ供給される回生電力(以後、「入力電力」という)の制限値を検出する二次電池入力制限値検出部6と、入力電力の制限値及び車両の速度に基づいて、駆動モータが生成するトルクの変化量の下限値を算出する駆動モータトルク変化量下限値算出部7とを備える。即ち、図12の車両用制御装置を図1の車両用制御装置と比べると、図1の二次電池入出力制限値検出部2は、図12の二次電池入力制限値検出部6に相当し、図1の駆動モータトルク変化量上下限値算出部3は、図12の駆動モータトルク変化量下限値算出部7に相当する。
(Second Embodiment)
As shown in FIG. 12, the vehicle control device according to the second embodiment of the present invention has, as its basic configuration, a vehicle
第2の実施の形態において図12に示した車両用制御装置の制御対象となる車両は、図3に示した燃料電池車両と同じであり、図示及び説明を省略する。 The vehicle to be controlled by the vehicle control device shown in FIG. 12 in the second embodiment is the same as the fuel cell vehicle shown in FIG.
次に、図5を参照して、図3の車両用制御装置による燃料電池車両の制御方法を説明する。図3の車両用制御装置は、バッテリコントローラ12から送られてきたバッテリ14の入力電力の制限値に基づき、駆動モータ15のトルク応答を補正する。以下にその詳細な手順を説明する。なお、以下の処理内容は、燃料電池システム16の運転開始時より所定時間毎(例えば10[ms]毎)に実行される。
Next, a control method of the fuel cell vehicle by the vehicle control device of FIG. 3 will be described with reference to FIG. The vehicle control device of FIG. 3 corrects the torque response of the
(イ)S01段階において車速センサ11が車速を検出し、S02段階においてアクセル開度センサ19がアクセル開度を検出し、S03段階においてバッテリコントローラ12がバッテリ14の入力電力の制限値を検出する。
(A) The vehicle speed sensor 11 detects the vehicle speed in step S01, the accelerator opening sensor 19 detects the accelerator opening in step S02, and the
(ロ)S04段階において、S01段階で検出した車速、S02段階で検出したアクセル開度及びS03段階で検出したバッテリ14の入力電力の制限値に基づき、コントローラ13が、駆動モータインバータ18に指令する駆動モータトルク指令値の変化量の下限値を補正演算する。
(B) In step S04, the
(ハ)S05段階において、S04段階で演算した駆動モータトルクの変化量の下限値に基づき、コントローラ13が、駆動モータインバータ18に指令する駆動モータ指令トルクを算出する。S06段階において、コントローラ13が、S05段階で算出した駆動モータ指令トルクを駆動モータインバータ18に指令する。以上の手順が繰り返し実行される。
(C) In step S05, the
図13を参照して、バッテリ14の充電状態(SOC)と入力電力の制限値との関係を説明する。予め実験などにより、バッテリ14の入力電力の制限値と、バッテリ14の充電状態、バッテリ14の劣化度及びバッテリ14の温度との関係を調べる。バッテリ14の充電状態が高くなるほど、バッテリ14の入力電力の制限値は低くなる。バッテリ14の劣化が進むほど、或いはバッテリ14の温度が適正温度が外れるほど、バッテリ14の入力電力の制限値は低くなる。このように、バッテリ入力電力制限値Bin [kW]は、バッテリ充電状態SOC1[%]とバッテリ劣化度及びバッテリ温度から推定される。
With reference to FIG. 13, the relationship between the state of charge (SOC) of
図14を参照して、図5のS04段階の詳細な手順を説明する。図14に示すように、S04段階はS451段階及びS452段階からなる。 With reference to FIG. 14, the detailed procedure of step S04 in FIG. 5 will be described. As shown in FIG. 14, step S04 comprises steps S451 and S452.
(A)S451段階では、S01で検出した車速VSP1 [km/h]と、S03段階で検出したバッテリ14の入力電力の制限値Bin[kW]に基づき、駆動モータ15のトルク変化量の下限値の補正係数kdec[-]を算出する。
(A) In step S451, based on the vehicle speed VSP 1 [km / h] detected in step S01 and the input power limit value B in [kW] detected in step S03, the torque change amount of the
(B)S452段階では、補正前の駆動モータ15のトルク変化量の下限値に、S451段階で算出したトルク変化量の下限値の補正係数kdec[-]を積算して、補正後の駆動モータ15のトルク変化量の下限値を算出する。
(B) In step S452, the correction coefficient k dec [−] of the lower limit value of the torque change amount calculated in step S451 is added to the lower limit value of the torque change amount of the
図15乃至図17(a)を参照して、図14のS451段階での駆動モータ15のトルク変化量の下限値の補正係数kdec [-]の演算方法について説明する。先ず、駆動モータ15のトルク変化量の下限値を補正する必要性について説明する。図15は、所定の車速VSP1[km/h]で駆動モータ15に最速応答を要求した場合の出力値の立下りの様子を示すグラフである。
With reference to FIG. 15 to FIG. 17A, a method of calculating the correction coefficient k dec [−] of the lower limit value of the torque change amount of the
図15のプロファイルA2は、駆動モータ15がバッテリ14へ入力することができる最大の電力(以後、「駆動モータ入力可能最大電力」という)[kW]を示す。駆動モータ入力可能最大電力は、燃料電池発電電力 [kW]と、バッテリ14へ入力することができる最大の電力(以後、「バッテリ最大入力電力」という)[kW]とを加算したものである。
Profile A 2 in FIG. 15 indicates the maximum power (hereinafter referred to as “maximum power that can be input to the drive motor”) [kW] that the
図15のプロファイルB2は、バッテリ14へ入力することができる電力が図13に示したバッテリ14の温度又は劣化度により制限される場合における、駆動モータ15がバッテリ14へ入力することができる電力(以後、「駆動モータ入力可能電力」という)[kW]を示す。駆動モータ入力可能電力は、燃料電池発電電力 [kW]と、S03段階で検出したバッテリ14の入力電力の制限値Bin[kW]とを加算したものである。
The profile B 2 in FIG. 15 indicates the power that the
図15のプロファイルC2は、燃料電池発電電力 [kW]を示す。 A profile C 2 in FIG. 15 shows fuel cell generated power [kW].
図15のプロファイルα2は、駆動モータ15の消費電力が駆動モータ入力可能最大電力(プロファイルA2)を下回らない範囲で、駆動モータ15に最速応答を要求した場合の駆動モータ15の出力を示す。プロファイルα2において設定された駆動モータ15のトルク変化量の下限値(補正前)で駆動モータ15へトルク指令を発してしまうと、図15の点P2において、駆動モータ15の出力(プロファイルα2)が、駆動モータ入力可能電力(プロファイルB2)を下回り、バッテリ14の過充電を起こす可能性がある。一方、図15のプロファイルβ2は、駆動モータ15の消費電力が駆動モータ入力可能電力(プロファイルB2)を下回らない範囲で、駆動モータ15に最速応答を要求した場合の駆動モータ15の出力を示す。図15のプロファイルβ2に示すように、駆動モータ15の消費電力が駆動モータ入力可能電力(プロファイルB2)を下回らない範囲で、駆動モータ15のトルク変化量の下限値を補正演算する。これにより、バッテリ14の過充電を回避できる。
A profile α 2 in FIG. 15 indicates an output of the
今、所定の車速VSP1[km/h]で駆動モータ15に最速応答を要求した場合について考える。バッテリ14の過充電を防止するために、駆動モータトルク指令値[Nm]が駆動モータ入力可能最大トルク[Nm] (プロファイルA2)を下回らないように駆動モータトルク指令値[Nm]のトルク変化量下限値を予め決定する必要がある(プロファイルα2)。
Consider a case where the
しかし、バッテリ最大入力電力[kW]が低下している場合に、トルク変化量下限値で駆動モータトルク指令値[Nm]を算出すると、駆動モータ入力可能トルク[Nm](プロファイルB2)を駆動モータトルク指令値[Nm]が下回り(P2)、バッテリ14の過充電を起こしてしまう可能性がある。
However, if the drive motor torque command value [Nm] is calculated with the torque change amount lower limit value when the battery maximum input power [kW] is decreasing, the drive motor input allowable torque [Nm] (profile B 2 ) is driven. There is a possibility that the motor torque command value [Nm] is lower (P 2 ) and the
そこで、駆動モータ入力可能トルク[Nm](プロファイルB2)を下回らないように、トルク変化量下限値を補正して駆動モータトルク指令値[Nm]を算出する必要がある。このときのバッテリ入力電力制限値Bin、補正係数kdec[-]及び車速VSP1との関係を求める。 Therefore, it is necessary to calculate the drive motor torque command value [Nm] by correcting the lower limit value of the torque change amount so as not to fall below the drive motor input possible torque [Nm] (profile B 2 ). At this time, the relationship between the battery input power limit value B in , the correction coefficient k dec [−], and the vehicle speed VSP 1 is obtained.
なお、図16は、図15の縦軸を駆動モータ15のトルクに換算したグラフである。即ち、燃料電池発電電力[kW]とバッテリ最大入力電力[kW]を加算したもののトルク変換値を駆動モータ入力可能最大トルク[Nm]とし、バッテリアシスト電力[kW]が低下している場合に、燃料電池発電電力[kW]とバッテリ入力電力制限値[kW]を加算したもののトルク変換値を駆動モータ入力可能トルク[Nm]とする。
FIG. 16 is a graph in which the vertical axis of FIG. 15 is converted into the torque of the
図17(a)に示すように、バッテリ入力電力制限値Binが大きくなるほど、駆動モータトルク変化量下限値の補正係数kdec[-]は大きくなる。また、車速VSP1が速くなるほど、駆動モータトルク変化量下限値の補正係数kdec [-]は小さくなる。車速センサ11が検出した車速VSP1[km/h]と、バッテリコントローラ12が検出したバッテリ入力電力制限値Bin[kW]とから、図17(a)を参照し、駆動モータトルク変化量下限値補正係数kdec[-]を算出する。
As shown in FIG. 17A, the correction coefficient k dec [−] of the drive motor torque change lower limit value increases as the battery input power limit value B in increases. Further, as the vehicle speed VSP 1 increases, the correction coefficient k dec [−] of the drive motor torque change lower limit value decreases. Based on the vehicle speed VSP 1 [km / h] detected by the vehicle speed sensor 11 and the battery input power limit value B in [kW] detected by the
次に、図17(b)に基づいて、車速VSP1[km/h]のときの駆動モータトルク変化量下限値は△Trqlo[Nm/10msec]であることがわかる。したがって、車速VSP1[km/h]及びバッテリ入力電力制限値Bin[kW]の時の、補正後の駆動モータトルク変化量下限値△Trqlo’は、(3)式から求めることができる。 Next, based on FIG. 17B, it can be seen that the lower limit value of the drive motor torque change amount at the vehicle speed VSP 1 [km / h] is ΔTrq lo [Nm / 10 msec]. Accordingly, the corrected lower limit value ΔTrq lo ′ of the drive motor torque after the vehicle speed VSP 1 [km / h] and the battery input power limit value B in [kW] can be obtained from the equation (3). .
△Trqlo’ = kdec × △Trqlo [Nm/10msec] ・・・(3)
図18を参照して、S05段階における駆動モータ指令トルクの算出方法を説明する。車速センサ11が検出した車速VSP1[km/h]及びアクセル開度センサ19が検出したアクセル開度APO[deg]から、目標駆動モータトルクTrq[Nm]を求めることができる。今、アクセル操作の踏込み時間が、△T[10msec]であったとき、目標駆動モータトルク変化量△Trq[Nm]は、(4)式から求めることができる。
△ Trq lo '= k dec × △ Trq lo [Nm / 10msec] (3)
With reference to FIG. 18, the calculation method of the drive motor command torque in step S05 will be described. The target drive motor torque Trq [Nm] can be obtained from the vehicle speed VSP 1 [km / h] detected by the vehicle speed sensor 11 and the accelerator opening APO [deg] detected by the accelerator opening sensor 19. Now, when the accelerator operation depression time is ΔT [10 msec], the target drive motor torque change amount ΔTrq [Nm] can be obtained from the equation (4).
△Trq = Trq /△T [Nm/10msec] ・・・(4)
「目標駆動モータトルク変化量△Trq」が「補正後の駆動モータトルク変化量下限値△Trqlo’」と等しい或いはより大きい場合、目標駆動モータトルクの変化量は補正後駆動モータトルク変化量下限値で制限し、それ以外であれば、ドライバの要求どおりの目標駆動モータトルク変化量として、駆動モータトルク指令値を算出する。
△ Trq = Trq / △ T [Nm / 10msec] (4)
If “target drive motor torque change amount ΔTrq” is equal to or greater than “corrected drive motor torque change amount lower limit value ΔTrq lo ′”, the target drive motor torque change amount is the lower limit of corrected drive motor torque change amount. Otherwise, the drive motor torque command value is calculated as the target drive motor torque change amount as requested by the driver.
以上説明したように、本発明の第2の実施の形態では、バッテリ14の入力電力の制限値Binに応じて、駆動モータ15のトルク変化量の下限値△Trqloを修正することにより、燃料電池システム16の定格発電電力及びバッテリ14の最大入力電力から求まる駆動モータ最大トルクが出力される。よって、二次電池(バッテリ)14の入力電力制限値が低下している場合に、駆動モータ15のトルクを過剰に制限することなく、ドライバの要求に応じた最小トルクを出力させることができる。換言すれば、車速とバッテリ14の入力電力を検出し、予めバッテリ14の過充電を引き起こさないように駆動モータ15のトルク変化量を補正することにより、ドライバが要求するトルクを駆動モータ15が出力する燃料電池車両の制御システムを提供することができる。
As described above, in the second embodiment of the present invention, by correcting the lower limit value ΔTrq lo of the torque change amount of the
(その他の実施の形態)
上記のように、本発明は、第1及び第2の実施の形態によって記載したが、この開示の一部をなす論述及び図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。即ち、本発明はここでは記載していない様々な実施の形態等を包含するということを理解すべきである。したがって、本発明はこの開示から妥当な特許請求の範囲に係る発明特定事項によってのみ限定されるものである。
(Other embodiments)
As described above, the present invention has been described according to the first and second embodiments. However, it should not be understood that the description and drawings constituting a part of this disclosure limit the present invention. From this disclosure, various alternative embodiments, examples and operational techniques will be apparent to those skilled in the art. That is, it should be understood that the present invention includes various embodiments not described herein. Therefore, the present invention is limited only by the invention specifying matters according to the scope of claims reasonable from this disclosure.
1…車速検出部
2…二次電池入出力制限値検出部
3…駆動モータトルク変化量上下限値算出部
4…二次電池出力制限値検出部
5…駆動モータトルク変化量上限値算出部
6…二次電池入力制限値検出部
7…駆動モータトルク変化量下限値算出部
11…車速センサ
12…バッテリコントローラ
13…コントローラ
14…バッテリ
15…駆動モータ
16…燃料電池システム
17…駆動ユニット
18…駆動モータインバータ
19…アクセル開度センサ
21…燃料電池スタック
22…加湿器
23…酸化ガス供給装置(コンプレッサ)
24…可変バルブ
25…スロットル
26…パージ弁
27…純水供給部
28…イジェクタ
29…高圧水素
30…空気圧力センサ
31…水素圧力センサ
32…空気流量センサ
33…水素流量センサ
34…制御部
35…セル電圧検出部
36…空気圧力センサ
37…温度センサ
DESCRIPTION OF
DESCRIPTION OF SYMBOLS 24 ... Variable valve 25 ... Throttle 26 ... Purge valve 27 ... Pure water supply part 28 ...
Claims (5)
前記駆動モータへ電力を供給する二次電池の出力電力又は入力電力の制限値を検出する二次電池入出力制限値検出手段と、
前記出力電力又は入力電力の制限値及び前記車両の速度に基づいて、前記駆動モータが生成するトルクの変化量の上限値又は下限値を算出する駆動モータトルク変化量上下限値算出手段
とを備えることを特徴とする車両用制御装置。 Vehicle speed detection means for detecting the speed of the vehicle, comprising a drive motor for supplying power to the drive shaft of the vehicle;
A secondary battery input / output limit value detecting means for detecting a limit value of output power or input power of a secondary battery that supplies power to the drive motor;
Drive motor torque change upper / lower limit value calculating means for calculating an upper limit value or a lower limit value of a change amount of torque generated by the drive motor based on the limit value of the output power or input power and the speed of the vehicle. A control apparatus for a vehicle.
前記駆動モータトルク変化量上下限値算出手段は、前記出力電力の制限値及び前記車両の速度に基づいて、前記駆動モータが生成するトルクの変化量の上限値を算出する駆動モータトルク変化量上限値算出手段であることを特徴とする請求項1記載の車両用制御装置。 The secondary battery input / output limit value detecting means is a secondary battery output limit value detecting means for detecting a limit value of the output power of the secondary battery,
The drive motor torque change amount upper and lower limit value calculating means calculates a drive motor torque change amount upper limit value for calculating an upper limit value of a torque change amount generated by the drive motor based on the output power limit value and the vehicle speed. 2. The vehicle control device according to claim 1, wherein the vehicle control device is a value calculating means.
前記駆動モータトルク変化量上下限値算出手段は、前記入力電力の制限値及び前記車両の速度に基づいて、前記駆動モータが生成するトルクの変化量の下限値を算出する駆動モータトルク変化量下限値算出手段であることを特徴とする請求項1記載の車両用制御装置。 The secondary battery input / output limit value detecting means is a secondary battery input limit value detecting means for detecting a limit value of input power of the secondary battery,
The drive motor torque change upper / lower limit value calculation means calculates a lower limit value of a change amount of torque generated by the drive motor based on the limit value of the input power and the speed of the vehicle. 2. The vehicle control device according to claim 1, wherein the vehicle control device is a value calculating means.
前記駆動モータへ電力を供給する二次電池の出力電力又は入力電力の制限値を検出し、
前記出力電力又は入力電力の制限値及び前記車両の速度に基づいて、前記駆動モータが生成するトルクの変化量の上限値又は下限値を算出する
ことを特徴とする車両制御方法。 Detecting the speed of the vehicle comprising a drive motor for supplying power to the drive shaft of the vehicle;
Detecting a limit value of output power or input power of a secondary battery that supplies power to the drive motor;
An upper limit value or a lower limit value of a change amount of torque generated by the drive motor is calculated based on the output power or the limit value of the input power and the speed of the vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004294927A JP2006109650A (en) | 2004-10-07 | 2004-10-07 | Vehicle control unit and vehicle control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004294927A JP2006109650A (en) | 2004-10-07 | 2004-10-07 | Vehicle control unit and vehicle control method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006109650A true JP2006109650A (en) | 2006-04-20 |
Family
ID=36378696
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004294927A Pending JP2006109650A (en) | 2004-10-07 | 2004-10-07 | Vehicle control unit and vehicle control method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006109650A (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2943589A3 (en) * | 2009-03-31 | 2010-10-01 | Renault Sas | Electric motor 's torque adjusting method for electric vehicle, involves applying current corresponding to setpoint to motor for generating corresponding motor torque to confer speed defined by position of accelerator pedal to vehicle |
| WO2011161814A1 (en) | 2010-06-25 | 2011-12-29 | トヨタ自動車株式会社 | Electrically driven vehicle and method of controlling thereof |
| US8269443B2 (en) | 2007-10-22 | 2012-09-18 | Toyota Jidosha Kabushiki Kaisha | Rotary electric machine control apparatus |
| US8718849B2 (en) | 2010-06-25 | 2014-05-06 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle and control method therefor |
| EP2100765A3 (en) * | 2008-02-29 | 2016-08-24 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Battery management control system |
| JP2017001498A (en) * | 2015-06-09 | 2017-01-05 | トヨタ自動車株式会社 | Hybrid vehicle |
| KR101804774B1 (en) | 2016-01-21 | 2017-12-05 | 현대자동차주식회사 | Fuel cell vehicle and controlling method therefor |
-
2004
- 2004-10-07 JP JP2004294927A patent/JP2006109650A/en active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8269443B2 (en) | 2007-10-22 | 2012-09-18 | Toyota Jidosha Kabushiki Kaisha | Rotary electric machine control apparatus |
| EP2100765A3 (en) * | 2008-02-29 | 2016-08-24 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Battery management control system |
| FR2943589A3 (en) * | 2009-03-31 | 2010-10-01 | Renault Sas | Electric motor 's torque adjusting method for electric vehicle, involves applying current corresponding to setpoint to motor for generating corresponding motor torque to confer speed defined by position of accelerator pedal to vehicle |
| WO2011161814A1 (en) | 2010-06-25 | 2011-12-29 | トヨタ自動車株式会社 | Electrically driven vehicle and method of controlling thereof |
| US8718849B2 (en) | 2010-06-25 | 2014-05-06 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle and control method therefor |
| US8755963B2 (en) | 2010-06-25 | 2014-06-17 | Toyota Jidosha Kabushiki Kaisha | Electrically-powered vehicle and control method therefor |
| JP2017001498A (en) * | 2015-06-09 | 2017-01-05 | トヨタ自動車株式会社 | Hybrid vehicle |
| KR101804774B1 (en) | 2016-01-21 | 2017-12-05 | 현대자동차주식회사 | Fuel cell vehicle and controlling method therefor |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5120594B2 (en) | Fuel cell system and operation method thereof | |
| US20100316926A1 (en) | Fuel cell system | |
| US8084151B2 (en) | Fuel cell system and method therefor | |
| JP5224082B2 (en) | Fuel cell system and drainage control method thereof | |
| US10107705B2 (en) | Fuel cell vehicle | |
| WO2009096229A1 (en) | Fuel battery system | |
| WO2006117969A1 (en) | Fuel cell system | |
| US8920994B2 (en) | Fuel cell system | |
| JP4525112B2 (en) | Control device for fuel cell vehicle | |
| JP4380676B2 (en) | Moving body | |
| JP2009026736A (en) | Fuel cell system | |
| JP2009026605A (en) | Fuel cell system, and mobile body | |
| JP2004265683A (en) | Fuel cell power generation control system | |
| US6875531B2 (en) | Fuel cell power supply device | |
| JP2006109650A (en) | Vehicle control unit and vehicle control method | |
| JP2004193063A (en) | Fuel cell system | |
| JP4569350B2 (en) | Electric motor system and method for controlling electric motor system | |
| JP2005085622A (en) | Fuel cell power generating system | |
| JP2008084603A (en) | Fuel cell system and its purging method | |
| JP4893916B2 (en) | Fuel cell system | |
| JP4816872B2 (en) | Fuel cell system | |
| US11440434B2 (en) | Hybrid vehicle and method for controlling hybrid vehicle | |
| JP2011210512A (en) | Fuel cell system | |
| JP7127600B2 (en) | FUEL CELL VEHICLE AND METHOD OF CONTROLLING FUEL CELL VEHICLE | |
| JP2007149450A (en) | Fuel cell system, movable body, and its starting method |