JP2004309246A - レーダ信号処理装置 - Google Patents
レーダ信号処理装置 Download PDFInfo
- Publication number
- JP2004309246A JP2004309246A JP2003101378A JP2003101378A JP2004309246A JP 2004309246 A JP2004309246 A JP 2004309246A JP 2003101378 A JP2003101378 A JP 2003101378A JP 2003101378 A JP2003101378 A JP 2003101378A JP 2004309246 A JP2004309246 A JP 2004309246A
- Authority
- JP
- Japan
- Prior art keywords
- target
- tracking
- area
- radar
- ship
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
【解決手段】レーダによる探知データからその探知データ内に含まれる物標のエコーを追尾対象の物標として捕捉し、時間経過に伴って変化するその物標の位置を追尾する。マークMa,Mb,Mcで示す追尾物標が、マークMMで示す自船の後方に設定した追尾解除領域Aに達した時、その物標についての追尾を自動的に解除する。これにより、表示内容が次第に煩雑になるという問題が回避でき、追尾不要となった物標を1つ1つ手動操作によって消去する必要もなくなり、監視の必要な物標について追尾を確実に行える。
【選択図】 図2
Description
【発明の属する技術分野】
この発明は、レーダ映像信号を基に物標の捕捉・追尾を行うレーダ信号処理装置に関するものである。
【0002】
【従来の技術】
従来、レーダを用いて他船などとの衝突を予防することを目的として、自動衝突予防援助装置(ARPA:Automatic Radar Plotting Aid)(以下「ARPA」と言う。)が多数の船舶で運用されている。
【0003】
このARPAは、レーダ映像信号をデジタル化して求めた所定探知領域の探知データを演算処理して、物標の位置を捕捉し、捕捉した物標のうち、利用者が指定した物標の位置、または自動的に捕捉した物標の位置を自動追尾する装置である(特許文献1参照)。また、このARPAは、追尾中の物標について、衝突危険度を算出し、それらを分かりやすい形で表示するとともに、危険な状態となったときに、それを警報する機能を備えている。
【0004】
図13は従来のARPAを備えたデータの構成を示すブロック図である。ここで、レーダアンテナ11は送受信部12で発生させたパルス信号を周期的に放射するとともに、その送受信方位を順に回転させる。ADコンバータ13は送受信部12からの受信信号をデジタルデータに変換し、メモリ14に書き込む。信号処理部15はメモリ14に書き込まれた1スイープ分のデータ、レーダアンテナ11のアンテナ角度データおよびコンパス35により求められた船首方位に基づき、表示メモリ16に対してレーダの映像を表示するためのデータを書き込む。表示制御部17は、表示メモリ16内のデータを表示信号に変換して表示器18へ出力する。
【0005】
ADコンバータ23は受信信号をデジタルデータに変換し、メモリ24に書き込む。物標検出部25はメモリ24に書き込まれた探知データおよびアンテナ角度のデータに基づいて物標を検出する。物標選別部26は物標検出部25で検出された物標のうち、追尾中の物標を選別し、運動推定部27へ与える。運動推定部27は追尾中の物標について、その相対/真運動を推定する。マーク表示制御部28は、運動推定部27により推定された追尾中の物標の位置および速度を表すマークを表示メモリ29へ書き込む。これにより表示器18にレーダ映像とともに追尾中物標のマークを表示する。この図13において物標検出部25、物標選別部26,運動推定部27,マーク表示制御部28および表示メモリ29がARPAの機能を果たす。
【0006】
【特許文献1】
特開昭63−100389号
【0007】
【発明が解決しようとする課題】
ところが、ARPAを利用する利用者にとって、レーダ映像に映る全ての物標が重要であることは稀であり、特定の物標を手動で捕捉したり、画面上に設定した自動捕捉領域に入る物標を自動捕捉するようにしている。
【0008】
しかし、以前には追尾し監視すべき物標であったものが、物標または自船の移動に伴い監視不要となっても自動追尾はそのまま継続される。一方、物標または自船の移動に伴って新たに監視すべき物標が生じると、上記手動捕捉を行ったり自動捕捉されて、そのマークが画面内に表示される。そのため、物標の多い海域ではARPAの運用に伴って追尾物標が増えてゆき、表示内容が煩雑になってしまう。
【0009】
そこで、従来は追尾不要となった物標を1つ1つ手動操作によって消去する必要があり、その操作に手間取ると言う問題があった。また、ARPAの演算処理能力の制限から、捕捉・追尾可能な物標の数には上限があるので、追尾中の物標の数がその上限にまで達した時、新たな物標の捕捉追尾ができなくなるという問題もあった。
【0010】
この発明の目的は、レーダ映像および追尾物標の視認性を高め、利用者の操作負担を軽減し、また演算処理能力を有効にできるようにして、自動衝突予防援助を円滑に行えるようにしたレーダ信号処理装置を提供することにある。
【0011】
【課題を解決するための手段】
この発明は、レーダによる所定探知領域の探知データから該探知データ内に含まれる物標によるエコーを捕捉し、該物標を追尾対象として設定する物標捕捉手段と、時間経過に伴って変化する前記追尾対象の物標の位置を追尾する物標追尾手段と、前記追尾対象の物標が、定められた追尾解除領域に入ったことを検出して、該物標を追尾対象から除く追尾解除手段とを備えたことを特徴としている。
【0012】
この構成により、追尾解除領域を予め設定しておくだけで、追尾対象の物標が追尾解除領域に入った時にその物標が追尾対象から自動的に解除される。
【0013】
また、この発明は、追尾解除領域をエコーを表示する画面内に表示するとともに、ポインティングデバイスからの入力操作によって追尾解除領域の設定を行うようにする。例えばトラックボールやマウスの操作によって画面内に追尾解除領域を任意に設定する。これにより、利用者の目的に応じて、また探知領域内の物標の状況に応じて、高い自由度の下で追尾解除領域を設定できる。
【0014】
また、この発明は、前記レーダが船舶に搭載されているものとし、該船舶の船尾方向で所定の領域を追尾解除領域として定めるようにする。例えば、船舶の船尾方向で方位範囲および距離範囲にそれぞれ広がる領域を追尾解除領域として定めるようにする。これにより、追尾解除領域を合計4つのパラメータで設定でき、その設定が容易となる。また追尾解除領域内外の判定も容易となる。
【0015】
また、この発明は、前記レーダが陸上に設置されているものとし、該レーダの探知領域内の所定範囲を追尾解除領域として定めるようにする。これにより、所定探知領域内の特に監視すべき領域内での物標の追尾が効率よく行える。
【0016】
また、この発明は、自船に搭載したレーダによる所定探知領域の探知データから該探知データ内に含まれる物標によるエコーを捕捉し、該物標を追尾対象として設定する物標捕捉手段と、時間経過に伴って変化する前記追尾対象の物標の位置を追尾する物標追尾手段と、前記物標追尾手段により追尾されている物標の、自船に対する相対運動から、自船との衝突危険度の評価値を求め、該評価値が所定の閾値より低くなったことを検出して、該物標を追尾対象から除く追尾解除手段とを備えたことを特徴としている。
【0017】
このように追尾物標の自船に対する相対運動から求めた衝突危険度の評価値が所定の閾値より低くなった物標が自動解除されるので、追尾不要となった物標の手動による解除操作が不要となる。しかも追尾解除領域の設定も不要となる。
【0018】
また、この発明は、自船に搭載したレーダによる所定探知領域の探知データから該探知データ内に含まれる物標によるエコーを捕捉し、該物標を追尾対象として設定する物標捕捉手段と、時間経過に伴って変化する前記追尾対象の物標の位置を追尾する物標追尾手段と、前記物標追尾手段により追尾されている物標の、自船に対する相対運動から、自船との衝突危険度の評価値を求める手段と、前記追尾対象の物標が、定められた追尾解除領域に入り、且つ前記評価値が所定の閾値より低い物標を追尾対象から除く追尾解除手段とを備えたことを特徴としている。
【0019】
この構成により、追尾物標が追尾解除領域に入り、且つ衝突危険度の低くなった物標が自動解除される。そのため、追尾物標の自船に対する相対範囲と相対運動の両方の条件を満足する、より確実に追尾不要となった物標を追尾解除できるようになる。
【0020】
【発明の実施の形態】
第1の実施形態に係るレーダ信号処理装置を備えたレーダの構成を図1〜図7を基に説明する。
図1はレーダの構成を示すブロック図である。図13に示した従来のレーダと異なり、追尾解除領域内外判定部31およびそれに対して追尾解除領域を設定するためのトラックボール32を備えている。また、物標選別部26の処理内容も異なる。
【0021】
図1において、レーダアンテナ11は送受信部12で発生させたパルス信号を周期的に放射するとともに、その送受信方位を順に回転させる。ADコンバータ13は送受信部12からの受信信号をデジタルデータに変換し、メモリ14に書き込む。信号処理部15はメモリ14に書き込まれた1スイープ分のデータ、レーダアンテナ11のアンテナ角度データおよびコンパス35により求められた船首方位に基づき、表示メモリ16に対してレーダの映像を表示するためのデータを書き込む。表示制御部17は、表示メモリ16内のデータを表示信号に変換して表示器18へ出力する。
【0022】
ADコンバータ23は受信信号をデジタルデータに変換し、メモリ24に書き込む。物標検出部25はメモリ24に書き込まれた探知データおよびアンテナ角度のデータに基づいて物標を検出する。物標選別部26は物標検出部25で検出された物標のうち、追尾中の物標を選別し、運動推定部27へ与える。運動推定部27は追尾中の物標について、その相対/真運動(二次元の真速度)を推定する。マーク表示制御部28は、追尾物標の真速度または必要に応じて相対速度と相対位置を表す追尾物標マークを表示メモリ29へ書き込む。また自船位置や自船の船首方位を示す自船マークを表示メモリ29へ書き込む。これにより、表示器18にレーダ映像とともに追尾中物標のマークおよび自船マークを表示する。
【0023】
追尾解除領域内外判定部31は、物標選別部26が選別した追尾物標についてその追尾物標が追尾解除領域に入ったか否かを判定して、追尾解除領域内に入った物標の追尾を解除する。トラックボール32は追尾解除領域内外判定部31に対して追尾解除領域を設定するために用いる。マーク表示制御部28は、この追尾解除領域を表示するためのデータを生成して表示メモリ29へ書き込む。これにより、表示器18の表示画面内にレーダ映像とともに追尾物標のマークおよび追尾解除領域を表示する。
【0024】
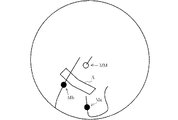
図2は追尾物標と追尾解除領域の表示例を示している。ここでMMは自船マーク、Ma,Mb,Mcはそれぞれ追尾物標マークである。自船マークMMの白丸が自船位置、そこから伸びる直線の方向が自船の針路または船首方位、更にその直線の長さが真速度を表している。また、追尾物標マークMa,Mb,Mcの黒丸が追尾物標の相対位置、そこから伸びる直線の方向が真針路、その直線の長さが真速度を表している。更に、追尾物標マークには、黒丸に付随して追尾物標番号を2桁の数字で表示している。またAで示す多角形領域は追尾解除領域である。この例では、自船から船尾方向に所定距離離れた位置で所定距離範囲および所定方位範囲に広がる領域を概略的になぞる多角形で追尾解除領域を定めている。
【0025】
因みに、自船位置を画面内の所定位置に固定して北方向を画面上方に向けて表示するノースアップモードで表示する場合、自船の船首尾方位の変化に伴ってこの追尾解除領域Aの表示画面内の位置も相対的に変位する。
【0026】
追尾物標の自船に対する相対運動によって追尾物標マークMa,Mb,Mcの何れかが追尾解除領域Aに入れば、その追尾物標は追尾対象から除かれ、その追尾物標マークは消去される。このような物標は自船の側方を通り過ぎて、自船より後方に移動し、更に自船から相対的に遠ざかろうとする物標であるので、もはや追尾対象とする必要は無い。そのため、このように自船から船尾方向に所定距離離れ且つ所定方位方向に広がる領域を追尾解除領域とすれば、通常の物標については追尾解除を効率よく自動化できる。
【0027】
次に、図1に示した物標選別部26、運動推定部27およびマーク表示制御部28の処理内容について各図を参照して説明する。
まず、運動推定部27が持つ追尾物標データの内容について図3に示す。ここで「物標番号」は追尾物標に対して自動的に付けた2桁の番号である。「相対位置」は、自船に対する追尾物標のx方向成分とy方向成分の相対距離、「相対速度」は自船に対する追尾物標のx方向成分とy方向成分の相対速度である。「CPA」は追尾物標が現在の相対位置から現在の相対運動を継続するとした場合に自船に最も近づくと予測される追尾物標の相対位置と自船との距離(Closest Point Approach)である。「TCPA」は追尾物標が上記自船に最も近づくと予想される点に達するまでに要する時間(Time to Closest Point Approach)である。「衝突危険度」はこのCPA、TCPA、および自船に対する相対速度に基づいて、予め定めた関係式で評価した値である。
【0028】
図4は物標選別部26および運動推定部27の処理内容を示す図である。ここでS(n−1)は前回の平滑処理により求めた追尾物標の位置、P(n)は今回の追尾物標の予測位置、M(n)は予測ゲートG(n)内に存在する、エコーの観測により求めた物標の位置である。G(n)はP(n)を中心とする所定半径の円形の予測ゲートである。すなわち、この予測ゲートG(n)内に存在する物標が追尾中の現在の位置であるものと見なす。S(n)は今回のP(n)とM(n)を基に平滑化して求める。また、図中V(n−1)は前回求めた平滑速度、V(n)は今回求めた平滑速度である。ここで、位置平滑化定数をα、速度平滑化定数をβとし、追尾誤差をE(n)とすると、次の式から平滑位置S(n)および平滑速度V(n)を求める。
【0029】
E(n)=M(n)−P(n)
S(n)=P(n)+αE(n)
V(n)=V(n−1)+βE(n)/T
ここでTはサンプリング周期である。この関係から、(n+1)スキャンの予測位置P(n+1)は、
P(n+1)=S(n)+V(n)T
で求められる。
【0030】
図5は物標選別部26および運動推定部27の物標追尾処理の内容について示している。まず、物標選別部26は、各予測ゲート内に存在する物標の位置を検出する(n11)。すなわち、現在追尾中である各物標について、予測ゲート内に存在する物標の位置をその物標の現在位置と見なす。続いて、運動推定部27は、図4に示した方法により、平滑位置S(n)および平滑速度V(n)を求める(n12)。また各追尾物標の次回の予測位置を求める(n12→n13)。ここで、平滑位置S(n)と平滑速度V(n)が追尾物標データ内の「相対位置」,「相対速度」にそれぞれ対応する。
【0031】
その後さらに、上述したCPA,TCPAを既知の方法で求める。このCPA、TCPA、および相対速度に応じて衝突危険度を求める(n14)。このようにして求めた各データで、図3に示した追尾物標データを更新する(n15)。
【0032】
図6は、追尾解除領域内外判定部31の物標捕捉・消去処理について示している。この処理では、まず、追尾物標が追尾解除領域内に入った場合に、その追尾物標に関するデータを図3に示した追尾物標データから消去する(n21)。これにより以降のその物標についての追尾を解除する。また追尾物標データのうち、追尾状態が追尾継続できなくなった物標(ロスト物標)を検出し、それを追尾物標データから消去する(n22)。すなわち、上記予測ゲート内に物標のエコーが現れなくなったとき、その物標はノイズなどのように継続的にエコーとして現れない偽像であったものと見なして追尾終了する。
【0033】
また、前述の予測ゲート外や追尾解除領域外で新たな物標を検出すれば、その物標についてのデータを追尾物標データへ追加する(n23→n24)。このことにより新たな物標の捕捉を自動的に行う。
【0034】
図7は、追尾解除領域の設定の処理について示している。追尾解除領域は、例えば図2においてAで示したように、多角形の各角位置を順に指定していくことにより設定する。その際、トラックボール32の操作内容を読み取って表示画面内に追尾解除領域の表示を行う(n31→n32)。トラックボールの操作が完了すれば、最終的に定まった追尾解除領域を座標のデータとして設定(記憶)する(n33→n34)。
【0035】
図2に示した例では、追尾解除領域を多角形で指定するようにしたが、これを図8の(A)に示すように扇形の一部の形状として指定するようにしてもよい。この場合、方位方向の始点ST_AZ、その終点END_AZ、距離方向の始点IN_R、その終点O_Rをそれぞれ指定することによってこの追尾解除領域Aを設定することができる。トラックボールで指定する場合には、例えば(ST_AZ,O_R)の点と(END_AZ,IN_R)の2点を指定するだけで設定を完了することができる。このような方位方向と距離方向のパラメータで追尾解除領域を設定した場合には、追尾物標が方位方向でST_AZ〜END_AZの間で、且つ距離方向にIN_R〜O_Rの範囲を満たす時、その物標の追尾を解除すればよい。
【0036】
また、図2に示したように多角形やその他の任意のループで追尾解除領域Aを設定した場合には、図8の(B)に示すように、偶数−奇数判定法により、追尾物標が追尾解除領域内外判定を行う。すなわち、追尾解除領域の外側にある点Oと物標の位置とを結ぶ線分が追尾解除領域の境界線と何回交わるかによって内外判定を行う。図中Pa,Pcで示すように、偶数回交わる場合には、その物標は追尾解除領域外に存在するものと見なし、Pbのように奇数回の場合には、その物標が追尾解除領域内に存在するものと見なす。但し、自船が多角形などの範囲内に存在し、その多角形の外側を追尾解除領域として設定した場合には、自船位置と物標とを結ぶ直線が多角形の辺を奇数回交わるとき、その物標は追尾解除領域外と見なし、偶数回のとき追尾解除領域内と見なす。
【0037】
さて、図2に示した例では、自船より後方に設定した追尾解除領域Aを追尾物標が通過した際、その追尾を解除する例を示したが、例えば図9に示すように、MMで示す自船より後方からMa、Mbで示す追尾物標が接近する際に、稀ではあるが追尾解除領域Aを通過する場合も生じる。このような場合には物標Ma,Mbの衝突危険度は一般に低くはないので、追尾を解除したくない場合も生じる。そこで、衝突危険度も考慮して追尾解除を行う。そのために、図6のステップn21の処理を図10の(A)のように変える。すなわち、追尾物標が追尾解除領域内に入り、且つその物標の衝突危険度が、予め定めた閾値Thより小さい時に限って、その物標を追尾物標データから消去する(n21a,n21b→n21c)。また、前述の追尾解除領域を設定せず、衝突危険度だけによって追尾解除を行ってもよい。この場合、図6のステップn21を図10の(B)のステップn21′に置き換えればよい。
【0038】
以上に示したレーダ信号処理装置では、船舶に搭載したレーダの信号を処理する例を示したが、港湾レーダなど、陸上に設置するレーダについて、そのレーダ信号の処理を行う装置の例を図11・図12を基に説明する。
図11は港湾レーダの構成を示すブロック図である。図1に示したレーダと異なるのは、GPS受信機34、そのアンテナ33、コンパス35を備えていないことである。その他は図1に示した船舶搭載用レーダと基本的に同様である。追尾解除領域内外判定部31は、追尾物標が追尾解除領域内に入った時、その物標についての追尾を解除する。トラックボール32は追尾解除領域を設定するために使用する。
【0039】
図12はこのレーダの表示器に表示される表示内容の例である。ここでMa〜Meはそれぞれ追尾物標のマークである。またA1,A2はそれぞれ追尾解除領域を示している。Ma〜Meで示す5つの追尾物標は陸と陸で挟まれた海峡内を航行している。これらの物標は海峡を右側通行で航行し、Ma,Mb,Mcで示す3つの物標は図において右から左方向へ航行していて、Md,Meで示す物標は図において左から右方向へ航行している。Ma,Mb,Mcで示す物標が追尾解除領域A1に達した時、それらは順次追尾解除される。同様にMd,Meで示す物標が追尾解除領域A2に達した時、それぞれ順に追尾解除される。これらの追尾解除領域を通過した後の物標については追尾を行わない。このことにより、特に監視すべき領域内でのみ物標の追尾が効率よく行える。
【0040】
なお、図1では、物標検出部25、物標選別部26、運動推定部27およびマーク表示制御部28、というように機能ブロックに分けて表したが、これらの部分は1つのデジタル演算処理部で演算処理によって行ってもよい。
【0041】
また、以上に示した各実施形態では、追尾解除領域を利用者が設定するように構成したが、例えば、船舶搭載レーダに適用する場合に、自船の船尾方向で方位方向および距離方向にそれぞれ所定幅広がる範囲を追尾解除領域として自動的に設定されるように構成してもよい。また、追尾解除領域を予め複数パターン設けておき、利用者がそのうちのいずれかを選択することによって、追尾解除領域を設定するように構成してもよい。
【0042】
【発明の効果】
この発明によれば、追尾解除領域を予め設定しておくだけで、追尾対象の物標が追尾解除領域に入った時に、その物標が追尾対象から自動的に解除されるので、利用者の操作負担が軽減され、無駄な追尾が避けられ、レーダ映像および重要な追尾物標の視認性が高まる。
【0043】
また、この発明によれば、追尾解除領域をエコーを表示する画面内に表示するとともに、ポインティングデバイスからの入力操作によって追尾解除領域の設定を行うようにしたので、利用者の目的に応じて、また探知領域内の物標の状況に応じて、高い自由度の下で追尾解除領域を設定できる。
【0044】
また、この発明によれば、レーダが船舶に搭載されていて、船舶の船尾方向で所定の領域を追尾解除領域として定めるようにしたので、所定探知領域内の特に監視すべき領域内での物標の追尾が効率よく行える。
【0045】
また、この発明によれば、その所定領域を所定方位の範囲および距離範囲に広がる領域を追尾解除領域として定めるようにしたので、追尾解除領域を合計4つのパラメータで設定でき、その設定が容易となる。また追尾解除領域内外の判定も容易となる。
【0046】
また、この発明によれば、自船に対する追尾物標の相対運動から求めた衝突危険度の評価値が所定の閾値より低くなった物標が自動解除されるようにしたので、追尾不要となった物標の手動による解除操作が不要となる。しかも追尾解除領域の設定も不要となる。
【0047】
また、この発明によれば、追尾物標が追尾解除領域に入り、且つ衝突危険度の低くなった物標が自動解除されるようにしたので、追尾物標の自船に対する相対範囲と相対運動の両方の条件を満足する、より確実に追尾不要となった物標を追尾解除できるようになる。
【図面の簡単な説明】
【図1】第1の実施形態に係るレーダの構成図
【図2】同レーダの表示器における表示例を示す図
【図3】追尾物標データの例を示す図
【図4】物標選別部の物標追尾処理の内容を説明するための図
【図5】物標追尾処理の内容を示すフローチャート
【図6】物標の捕捉および消去に関する処理内容を示すフローチャート
【図7】追尾解除領域の設定処理に関するフローチャート
【図8】第2の実施形態に係るレーダにおける追尾解除領域の例および追尾解除領域内外の判定方法を示す図
【図9】第3の実施形態に係るレーダの表示器における表示内容の例を示す図
【図10】同レーダの物標捕捉・消去処理内容の一部を示す図
【図11】第4の実施形態に係る港湾レーダの構成を示すブロック図
【図12】同レーダの表示器における表示例を示す図
【図13】従来のレーダの構成を示すブロック図
【符号の説明】
MM−自船マーク
Ma〜Me−追尾物標マーク
A−追尾解除領域
11−レーダアンテナ
33−GPSアンテナ
Claims (7)
- レーダによる所定探知領域の探知データから該探知データ内に含まれる物標によるエコーを捕捉し、該物標を追尾対象として設定する物標捕捉手段と、時間経過に伴って変化する前記追尾対象の物標の位置を追尾する物標追尾手段と、前記追尾対象の物標が、定められた追尾解除領域に入ったことを検出して、該物標を追尾対象から除く追尾解除手段とを備えたレーダ信号処理装置。
- 前記追尾解除領域を前記エコーを表示する画面内に表示するとともに、該追尾解除領域をポインティングデバイスからの入力操作を読み取って設定する手段を設けた請求項1に記載のレーダ信号処理装置。
- 前記レーダは船舶に搭載されていて、該船舶の船尾方向で所定の領域を前記追尾解除領域とした請求項1または2に記載のレーダ信号処理装置。
- 前記所定の領域は所定の方位範囲および距離範囲にそれぞれ広がる領域である請求項3に記載のレーダ信号処理装置。
- 前記レーダは陸上に設置されていて、該レーダの探知領域内の所定範囲を前記追尾解除領域とした請求項1、2または3に記載のレーダ信号処理装置。
- 自船に搭載したレーダによる所定探知領域の探知データから該探知データ内に含まれる物標によるエコーを捕捉し、該物標を追尾対象として設定する物標捕捉手段と、時間経過に伴って変化する前記追尾対象の物標の位置を追尾する物標追尾手段と、
前記物標追尾手段により追尾されている物標の、自船に対する相対運動から、自船との衝突危険度の評価値を求め、該評価値が所定の閾値より低くなったことを検出して、該物標を追尾対象から除く追尾解除手段とを備えたレーダ信号処理装置。 - 自船に搭載したレーダによる所定探知領域の探知データから該探知データ内に含まれる物標によるエコーを捕捉し、該物標を追尾対象として設定する物標捕捉手段と、時間経過に伴って変化する前記追尾対象の物標の位置を追尾する物標追尾手段と、
前記物標追尾手段により追尾されている物標の、自船に対する相対運動から、自船との衝突危険度の評価値を求める手段と、
前記追尾対象の物標が、定められた追尾解除領域に入り、且つ前記評価値が所定の閾値より低い物標を追尾対象から除く追尾解除手段とを備えたレーダ信号処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003101378A JP2004309246A (ja) | 2003-04-04 | 2003-04-04 | レーダ信号処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003101378A JP2004309246A (ja) | 2003-04-04 | 2003-04-04 | レーダ信号処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004309246A true JP2004309246A (ja) | 2004-11-04 |
Family
ID=33465188
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003101378A Pending JP2004309246A (ja) | 2003-04-04 | 2003-04-04 | レーダ信号処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004309246A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2808697A1 (en) | 2013-05-31 | 2014-12-03 | Furuno Electric Co., Ltd. | Radar device and method of acquiring and tracking target |
| JP2016217824A (ja) * | 2015-05-19 | 2016-12-22 | 三菱電機株式会社 | レーダ装置 |
| EP3196669A1 (en) | 2016-01-22 | 2017-07-26 | Furuno Electric Co., Ltd. | Radar apparatus and method of tracking target object |
| JP2017182729A (ja) * | 2016-03-31 | 2017-10-05 | 富士通株式会社 | 回避行動判定プログラム、回避行動判定方法および回避行動判定装置 |
| WO2022209135A1 (ja) * | 2021-03-30 | 2022-10-06 | 富士フイルム株式会社 | 制御装置、制御方法、及びプログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63100389A (ja) * | 1986-10-17 | 1988-05-02 | Nkk Corp | 衝突予防装置 |
| JPH03161899A (ja) * | 1989-11-20 | 1991-07-11 | Tokimec Inc | 自動追尾装置 |
| JPH07246998A (ja) * | 1994-03-08 | 1995-09-26 | Tokimec Inc | 船舶用航行支援装置 |
| JPH09236658A (ja) * | 1996-02-29 | 1997-09-09 | Furuno Electric Co Ltd | 物標運動推定装置 |
| JP2000009823A (ja) * | 1998-06-19 | 2000-01-14 | Anritsu Corp | レーダ装置及びその類似装置 |
| JP2000235069A (ja) * | 1999-02-16 | 2000-08-29 | Japan Radio Co Ltd | ガードゾーン表示機能を有するレーダ装置およびレーダ装置におけるガードゾーンの描画方法 |
| JP2002372583A (ja) * | 2001-04-09 | 2002-12-26 | Furuno Electric Co Ltd | 船舶表示装置および港湾監視装置 |
| JP2003075531A (ja) * | 2001-09-05 | 2003-03-12 | Fujitsu Ten Ltd | レーダ測距装置 |
-
2003
- 2003-04-04 JP JP2003101378A patent/JP2004309246A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63100389A (ja) * | 1986-10-17 | 1988-05-02 | Nkk Corp | 衝突予防装置 |
| JPH03161899A (ja) * | 1989-11-20 | 1991-07-11 | Tokimec Inc | 自動追尾装置 |
| JPH07246998A (ja) * | 1994-03-08 | 1995-09-26 | Tokimec Inc | 船舶用航行支援装置 |
| JPH09236658A (ja) * | 1996-02-29 | 1997-09-09 | Furuno Electric Co Ltd | 物標運動推定装置 |
| JP2000009823A (ja) * | 1998-06-19 | 2000-01-14 | Anritsu Corp | レーダ装置及びその類似装置 |
| JP2000235069A (ja) * | 1999-02-16 | 2000-08-29 | Japan Radio Co Ltd | ガードゾーン表示機能を有するレーダ装置およびレーダ装置におけるガードゾーンの描画方法 |
| JP2002372583A (ja) * | 2001-04-09 | 2002-12-26 | Furuno Electric Co Ltd | 船舶表示装置および港湾監視装置 |
| JP2003075531A (ja) * | 2001-09-05 | 2003-03-12 | Fujitsu Ten Ltd | レーダ測距装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2808697A1 (en) | 2013-05-31 | 2014-12-03 | Furuno Electric Co., Ltd. | Radar device and method of acquiring and tracking target |
| JP2016217824A (ja) * | 2015-05-19 | 2016-12-22 | 三菱電機株式会社 | レーダ装置 |
| EP3196669A1 (en) | 2016-01-22 | 2017-07-26 | Furuno Electric Co., Ltd. | Radar apparatus and method of tracking target object |
| US10514455B2 (en) | 2016-01-22 | 2019-12-24 | Furuno Electric Co., Ltd. | Radar apparatus and method of tracking target object |
| JP2017182729A (ja) * | 2016-03-31 | 2017-10-05 | 富士通株式会社 | 回避行動判定プログラム、回避行動判定方法および回避行動判定装置 |
| WO2022209135A1 (ja) * | 2021-03-30 | 2022-10-06 | 富士フイルム株式会社 | 制御装置、制御方法、及びプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20170052029A1 (en) | Ship display device | |
| US8665136B2 (en) | Image processing device, radar apparatus equipped with the same, method of processing image, and image processing program | |
| JP5658871B2 (ja) | 信号処理装置、レーダ装置、信号処理プログラム及び信号処理方法 | |
| JP2012233743A (ja) | 情報表示装置 | |
| JP6234710B2 (ja) | レーダ装置及び物標捕捉追尾方法 | |
| JP6084812B2 (ja) | 追尾処理装置、及び追尾処理方法 | |
| JP6931710B2 (ja) | レーダ装置及び物標追尾方法 | |
| JP6084810B2 (ja) | 追尾処理装置、及び追尾処理方法 | |
| JP4965035B2 (ja) | 船舶表示装置および港湾監視装置 | |
| JP2003337170A (ja) | レーダ信号処理装置およびレーダ | |
| JP4838660B2 (ja) | 航跡表示機能付レーダ装置 | |
| JP2004309246A (ja) | レーダ信号処理装置 | |
| JP2008014874A (ja) | 船舶用レーダ | |
| JP2007064768A (ja) | 水中探知装置 | |
| JP6703799B2 (ja) | レーダ装置及び航跡表示方法 | |
| JP4153625B2 (ja) | 運動予測装置 | |
| JP6466702B2 (ja) | 追尾処理装置、レーダ装置、および、追尾処理方法 | |
| CN115328131A (zh) | 一种无人船的避障方法、装置、无人船及存储介质 | |
| Pappas et al. | Superpixel-guided CFAR detection of ships at sea in SAR imagery | |
| WO2023112349A1 (ja) | 物標監視装置、物標監視方法、及びプログラム | |
| WO2023112348A1 (ja) | 物標監視装置、物標監視方法、及びプログラム | |
| WO2023162561A1 (ja) | 物標監視装置、操船システム、物標監視方法、及びプログラム | |
| JP3609160B2 (ja) | 船舶用レーダの物標警報装置 | |
| JPH0394186A (ja) | 物標追尾装置 | |
| JP2017003386A (ja) | レーダ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050530 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070109 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070308 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070619 |