DE102014217387A1 - Method for operating a tilting chassis and active tilting suspension for a rail-bound vehicle - Google Patents
Method for operating a tilting chassis and active tilting suspension for a rail-bound vehicle Download PDFInfo
- Publication number
- DE102014217387A1 DE102014217387A1 DE102014217387.6A DE102014217387A DE102014217387A1 DE 102014217387 A1 DE102014217387 A1 DE 102014217387A1 DE 102014217387 A DE102014217387 A DE 102014217387A DE 102014217387 A1 DE102014217387 A1 DE 102014217387A1
- Authority
- DE
- Germany
- Prior art keywords
- vehicle
- inclination angle
- actuator
- inclination
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0162—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input mainly during a motion involving steering operation, e.g. cornering, overtaking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D9/00—Steering deflectable wheels not otherwise provided for
- B62D9/02—Steering deflectable wheels not otherwise provided for combined with means for inwardly inclining vehicle body on bends
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K5/00—Cycles with handlebars, equipped with three or more main road wheels
- B62K5/10—Cycles with handlebars, equipped with three or more main road wheels with means for inwardly inclining the vehicle body on bends
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2300/00—Indexing codes relating to the type of vehicle
- B60G2300/45—Rolling frame vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
Die Erfindung betrifft ein Verfahren zum Betrieb eines Neigefahrwerks (2) für ein schienenungebundenes Fahrzeug (1) mit wenigstens einem Aktuator. Hierzu wird ein aufgrund einer Zentrifugalbeschleunigung (ay) in einer Kurve erforderlicher Neigungswinkel (φ) des Fahrzeugs (1) gegenüber einem globalen Koordinatensystem (x, y, z) um eine Drehachse (P) herum zumindest teilweise durch eine von dem Aktuator erzeugbare Stellkraft (F) eingestellt. Erfindungsgemäß wird der Neigungswinkel (φ) auf Basis aktueller Werte der Zentrifugalbeschleunigung (ay) und der Erdbeschleunigung (g) derart berechnet, dass ein aus diesen resultierender Wert einer Querbeschleunigung (ay') in Bezug auf ein gegenüber dem globalen Koordinatensystem (x, y, z) um den Neigungswinkel (φ) geneigtes Fahrzeugkoordinatensystem (x', y', z') gleich null ist. Nach dem Einstellen des berechneten Neigungswinkels (φ) wird der zur Einsparung von Energie Aktuator deaktiviert. Weiterhin ist die Erfindung auf ein Neigefahrwerk (2) zur Durchführung des Verfahrens gerichtet.The invention relates to a method for operating a tilting chassis (2) for a rail-unbound vehicle (1) with at least one actuator. For this purpose, an inclination angle (φ) of the vehicle (1) required in a curve due to centrifugal acceleration (ay) is determined at least partly by a force (s) generated by the actuator relative to a global coordinate system (x, y, z) about an axis of rotation (P) ( F) is set. According to the invention, the angle of inclination (φ) is calculated on the basis of current values of the centrifugal acceleration (ay) and the gravitational acceleration (g) in such a way that a value of a transverse acceleration (ay ') resulting therefrom with respect to the global coordinate system (x, y, z) is equal to zero by the inclination angle (φ) inclined vehicle coordinate system (x ', y', z '). After setting the calculated inclination angle (φ), the energy-saving actuator is deactivated. Furthermore, the invention is directed to a tilting chassis (2) for carrying out the method.
Description
Die vorliegende Erfindung betrifft ein Verfahren zum Betrieb eines Neigefahrwerks für ein schienenungebundenes Fahrzeug mit wenigstens einem Aktuator nach dem Oberbegriff von Anspruch 1.The present invention relates to a method for operating a tilting suspension for a rail-bound vehicle with at least one actuator according to the preamble of
Einspurige Fahrzeuge – wie etwa ein Motorrad – weisen die Eigenart auf, dass diese in Kurven eine angemessene Querneigung in die jeweilige Lenkrichtung verlangen. Durch das sogenannte "Legen" des Fahrzeugs in Richtung Kurvenmittelpunkt wird ein Kippmoment erzeugt, welche der auf das Fahrzeug einwirkenden und sich mit zunehmender Geschwindigkeit erhöhenden Fliehkraft entgegenwirkt. Ohne dessen Neigung würde das Fahrzeug aus der Kurve heraus quasi umfallen.Single-track vehicles - such as a motorcycle - have the peculiarity that they require in curves a proper bank in the respective steering direction. Due to the so-called "laying" of the vehicle in the direction of the center of the curve, a tilting moment is generated which counteracts the centrifugal force acting on the vehicle and increasing with increasing speed. Without its inclination, the vehicle would virtually fall out of the curve.
Zukünftige Verkehrsszenarien sehen auch für mehrspurige Fahrzeuge deutlich schmalere Fahrzeugkonzepte gegenüber heutigen Personenfahrzeugen vor. Bei derartigen, insbesondere an wenigstens einer Achse zweispurigen Fahrzeugen mit geringer Spurbreite ergibt sich ein ähnliches Stabilitätsproblem wie bei einspurigen Fahrzeugen. Hier reicht das sich auf Basis der Gewichtskraft und der Spurbreite ergebende Gegenmoment ab einer individuellen Kurvengeschwindigkeit nicht mehr aus. Im Ergebnis kann das kurveninnere Rad der Achse während eines Lenkmanövers seinen Kontakt zum Untergrund verlieren. In diesem Zustand droht das Fahrzeug dann ab einer bestimmten Geschwindigkeit ebenfalls gegen die Kurvenrichtung und somit aus der Kurve heraus umzukippen.Future traffic scenarios also provide significantly narrower vehicle concepts for multi-lane vehicles compared to today's passenger vehicles. In such vehicles, in particular on at least one axle, two-lane vehicles with a narrow track width, a similar stability problem arises as with single-lane vehicles. Here, on the basis of the weight and the track width resulting counter-torque from an individual cornering speed is no longer sufficient. As a result, the inside wheel of the axle may lose contact with the ground during a steering maneuver. In this state, the vehicle threatens then from a certain speed also against the curve direction and thus overturn out of the curve.
Neben dem Herabsetzen des Fahrzeugschwerpunktes wurden derartige Fahrzeuge daher bereits mit einer Neigetechnik ausgestattet, wodurch deren Aufbau wie der eines Motorrades in die Kurve gelegt werden kann. Die auf diese Weise wie bei einspurigen Fahrzeugen mögliche Stabilisierung kann beispielsweise durch die das Fahrzeug lenkende Person und/oder über ein geeignetes Neigemittel erfolgen. Bei sogenannten passiven Neigefahrwerken beschränken sich die Anregungen zur Einnahme oder Veränderung der Fahrzeugneigung rein auf manuelle Lenkeingaben und/oder die Gewichtsverlagerung der Person. Demgegenüber sehen aktive Neigefahrwerke deren direkte Verstellung durch das jeweilige Neigemittel vor.In addition to the reduction of the vehicle's center of gravity, such vehicles have therefore already been equipped with a tilting technology, whereby their structure like that of a motorcycle can be placed in the curve. The stabilization possible in this way, as in the case of single-track vehicles, can take place, for example, by the person guiding the vehicle and / or by means of a suitable tilting means. In so-called passive pitch suspensions, the suggestions for taking or changing the vehicle inclination are limited to manual steering inputs and / or the person's weight shift. In contrast, active tilting chassis provide for their direct adjustment by the respective tilting means.
Im Stand der Technik sind bereits diverse Ausgestaltungen für mit einem Neigefahrwerk ausgestattete Fahrzeuge bekannt. Mit einem Neigefahrwerk ausgestattete Fahrzeuge werden im Rahmen der Erfindung auch als Neigefahrzeuge bezeichnet.Various designs for vehicles equipped with a tilting suspension are already known in the prior art. Vehicles equipped with a tilting suspension are also referred to as tilting vehicles in the context of the invention.
So geht beispielsweise aus der
Auch die
Ein ähnlicher Aufbau geht aus der
Die
Auch die
Der
Die Kontrolle sowie die Betätigung von mit einem Neigemittel – wie beispielsweise einem Aktuator – ausgestatteten aktiven Neigefahrwerken stellt eine Vielzahl an Herausforderungen dar. Zur Erfassung der Fahrdynamik eines in Fahrt befindlichen Fahrzeugs können beispielsweise die insbesondere in Kurven auftretende Zentrifugalbeschleunigung oder die Gierrate herangezogen werden. Deren Erfassung erfolgt allerdings nur innerhalb eines Fahrzeugkoordinatensystems, welches sich aufgrund der wechselnden Neigung des Fahrzeugs beständig gegenüber dem globalen Koordinatensystem verändert.Control and operation of active tilting suspensions equipped with a tilting means such as an actuator presents a multitude of challenges. For example, the centrifugal acceleration or the yaw rate occurring in particular in curves can be used to record the driving dynamics of a vehicle in motion. However, their detection takes place only within a vehicle coordinate system, which changes constantly due to the changing inclination of the vehicle relative to the global coordinate system.
Für ein Fahrzeug ohne Neigefahrwerk, welches nur kleine Winkel für seine mögliche Neigung aufweist, kann die Genauigkeit dieser Signale als ausreichend angesehen werden. Bei einem Fahrzeug mit einem Neigefahrwerk sind die vorzunehmenden Messungen allerdings komplizierter sowie ungenauer und verlangen beispielsweise zusätzliche Informationen über den Neigungswinkel und die Veränderungen der Koordinaten. Hinzu kommt, dass die eingesetzten Aktuatoren durch deren ständige Kraftbereitstellung einen mitunter hohen Energieverbrauch aufweisen. Dies gilt sowohl während des aktiven Eingreifens mit dem Ziel einer Neigungsverlagerung als auch während des Haltens einer bereits eingenommenen Neigung. Dies widerspricht bisweilen dem Effizienzgedanken solcher kleineren und schmaleren Fahrzeuge.For a vehicle without a taillight, which has only small angles for its possible inclination, the accuracy of these signals can be considered sufficient. In a vehicle with a tilting chassis, however, the measurements to be made are more complicated and inaccurate, requiring, for example, additional information about the angle of inclination and the changes in the coordinates. In addition, the actuators used by their constant power supply have a sometimes high energy consumption. This applies both during the active intervention with the aim of a tilt shift as well as while holding a tilt already taken. This sometimes contradicts the idea of efficiency of such smaller and narrower vehicles.
Angesichts der bisherigen mitunter aufwendigen Ausgestaltungen für die Steuerung und Regelung von aktiven Neigesystemen für Fahrzeuge sowie dem mitunter hohen Verbrauch an Energie bietet der Betrieb solcher Neigefahrwerke daher durchaus noch Raum für Verbesserungen.In view of the previously sometimes elaborate designs for the control and regulation of active tilting systems for vehicles and the sometimes high energy consumption of the operation of such Neigefahrwerke therefore quite room for improvement.
Vor diesem Hintergrund liegt der Erfindung die Aufgabe zugrunde, ein Verfahren zum Betrieb eines Neigefahrwerks sowie ein aktives Neigefahrwerk für ein Fahrzeug aufzuzeigen, durch welches neben einer einfacheren und damit kostengünstigeren Regelung sowie Steuerung insbesondere ein energieeffizienterer Einsatz des aktiven Neigemittels ermöglicht wird.Against this background, the present invention seeks to provide a method for operating a tilting chassis and an active tilting chassis for a vehicle, which in addition to a simpler and thus more cost-effective control and control in particular a more energy efficient use of the active tilting means is possible.
Diese Aufgabe wird durch ein Verfahren mit den Merkmalen des Anspruchs 1 gelöst. Weitere, besonders vorteilhafte Ausgestaltungen der Erfindung offenbaren die Unteransprüche.This object is achieved by a method having the features of
Es ist darauf hinzuweisen, dass die in der nachfolgenden Beschreibung einzeln aufgeführten Merkmale sowie Maßnahmen in beliebiger, technisch sinnvoller Weise miteinander kombiniert werden können und weitere Ausgestaltungen der Erfindung aufzeigen. Die Beschreibung charakterisiert und spezifiziert die Erfindung insbesondere im Zusammenhang mit den Figuren zusätzlich.It should be noted that the features listed in the following description as well as measures in any technically meaningful way can be combined with each other and show other embodiments of the invention. The description additionally characterizes and specifies the invention, in particular in connection with the figures.
Hiernach wird nachfolgend ein Verfahren zum Betrieb eines aktiven Neigefahrwerks aufgezeigt, welche sich insbesondere für ein schienenungebundenes Fahrzeug eignet.Hereinafter, a method for operating an active tilting suspension is shown below, which is particularly suitable for a track-bound vehicle.
Hierzu umfasst das Neigefahrwerk wenigstens ein Neigemittel, bei welchem es sich in bevorzugter Weise um einen Aktuator handeln kann. Dieser wird zur aktiven Einstellung sowie Veränderung des jeweils erforderlichen Neigungswinkels des Fahrzeugs um eine Drehachse herum angesteuert. Ziel ist die Kompensierung der in Kurven auftretenden Zentrifugalbeschleunigung, durch welche sich das Fahrzeug ohne Gegenkraft um die Drehachse herum radial aus der Kurve heraus neigen würde. Die jeweilige Höhe der Zentrifugalbeschleunigung hängt dabei insbesondere von der aktuellen Geschwindigkeit des Fahrzeugs und/oder dessen Lenkwinkel ab. Um nun die benötigte Gegenkraft zu erhalten, wird das Fahrzeug aktiv in die der Zentrifugalbeschleunigung entgegengesetzte Richtung um die Drehachse herum und somit in die jeweilige Kurve hinein geneigt. Der Neigungswinkel wird dabei durch den Aktuator eingestellt, indem dieser eine entsprechende Stellkraft erzeugt.For this purpose, the tilting chassis comprises at least one tilting means, which may preferably be an actuator. This is controlled for active setting and changing the respectively required angle of inclination of the vehicle about an axis of rotation around. The aim is to compensate for the centrifugal acceleration occurring in curves, through which the vehicle would tilt radially out of the curve without counterforce around the axis of rotation. The respective height of the centrifugal acceleration depends in particular on the current speed of the vehicle and / or its steering angle. In order to obtain the required counterforce, the vehicle is actively inclined in the direction opposite to the centrifugal acceleration about the axis of rotation and thus into the respective curve. The inclination angle is adjusted by the actuator by this generates a corresponding force.
Selbstverständlich kann die das Fahrzeug steuernde Person ebenfalls einen entsprechenden Beitrag wie etwa eine Gewichtsverlagerung zum Erreichen des benötigten Neigungswinkels leisten. Hierdurch kann sich die durch den Aktuator zu erzeugende Stellkraft auf eine dann noch vorhandene Differenz reduziert werden. Of course, the person controlling the vehicle can also make a corresponding contribution, such as weight shifting, to achieve the required angle of inclination. As a result, the actuating force to be generated by the actuator can be reduced to a remaining difference.
Erfindungsgemäß erfolgt die Berechnung des jeweiligen Neigungswinkels so, dass als Basis hierfür die aktuellen Werte für die Zentrifugalbeschleunigung und die Erdbeschleunigung herangezogen werden. Deren jeweiligen Richtungen werden in Bezug auf ein globales Koordinatensystem angenommen, welches von dem jeweiligen Neigungswinkel des Fahrzeugs unabhängig ist. Damit ist die gemessene Zentrifugalbeschleunigung in eine horizontale Richtung gerichtet, während die angenommene oder ebenfalls gemessene Erdbeschleunigung senkrecht hierzu in Richtung des zu befahrenden Untergrundes weist.According to the invention, the calculation of the respective inclination angle takes place in such a way that the current values for the centrifugal acceleration and the gravitational acceleration are used as a basis for this. Their respective directions are assumed with respect to a global coordinate system which is independent of the respective inclination angle of the vehicle. Thus, the measured centrifugal acceleration is directed in a horizontal direction, while the assumed or also measured gravitational acceleration points perpendicular thereto in the direction of the ground to be traveled.
Zielführend hierbei ist, dass sowohl die Zentrifugalbeschleunigung als auch die Erdbeschleunigung in ihre Komponenten zerlegt werden, welche sich bei einer Neigung des Fahrzeugs aus seiner aufrechten Position heraus ergeben. Mit anderen Worten erstreckt sich das Fahrzeug oder dessen Aufbau in einem eigenen Fahrzeugkoordinatensystem, welches in Abhängigkeit von dem jeweiligen Neigungswinkel gegenüber dem globalen Koordinatensystem gekippt ist. Hierbei sind insbesondere die sich senkrecht zur um die Drehachse neigbaren Hochachse des Fahrzeugs erstreckende Komponenten der Zentrifugalbeschleunigung und der Erdbeschleunigung relevant. Diese weisen gewöhnlich in voneinander entgegengesetzte Richtungen. Der hieraus resultierende Wert in Bezug auf das Fahrzeugkoordinatensystem wird als Querbeschleunigung des Fahrzeugs senkrecht zu seiner dabei geneigten Hochachse definiert.The aim here is that both the centrifugal acceleration and the gravitational acceleration are decomposed into their components, which result in an inclination of the vehicle from its upright position out. In other words, the vehicle or its structure extends in a separate vehicle coordinate system, which is tilted in dependence on the respective inclination angle relative to the global coordinate system. In this case, in particular, the components of the centrifugal acceleration and the gravitational acceleration which extend perpendicular to the vertical axis of the vehicle, which can be inclined about the axis of rotation, are relevant. These usually point in opposite directions. The resulting value with respect to the vehicle coordinate system is defined as the lateral acceleration of the vehicle perpendicular to its inclined vertical axis.
Nach der Erfindung wird nun der zu berechnende Neigungswinkel des Fahrzeugs bzw. des Aufbaus grundsätzlich so gewählt, dass sich für die Querbeschleunigung senkrecht zur Hochachse (des gegenüber dem globalen Koordinatensystem geneigten Fahrzeugkoordinatensystems) ein Wert von null ergibt. Auf diese Weise wird bei einem Neigefahrzeug mit einer nah des zu befahrenden Untergrundes gelegenen Drehachse ein Gleichgewicht der Momente um diese Drehachse herum erzeugt.According to the invention, the angle of inclination of the vehicle or the structure to be calculated is fundamentally chosen such that a value of zero results for the transverse acceleration perpendicular to the vertical axis (of the vehicle coordinate system inclined with respect to the global coordinate system). In this way, an equilibrium of the moments is generated around this axis of rotation in a tilting vehicle with an axis of rotation close to the ground to be traveled.
Der jeweils erforderliche Neigungswinkel "φ" kann näherungsweise wie folgt berechnet werden:
Bei Einstellung des so berechneten Neigungswinkels ist der Wert für die Querbeschleunigung senkrecht zur Hochachse des geneigten Fahrzeugs gleich null. Dies meint, dass bei einer so eingenommenen Neigung des Fahrzeugs während seiner Kurvenfahrt kein Moment um die Drehachse herum vorhanden ist.When setting the inclination angle thus calculated, the value for the lateral acceleration perpendicular to the vertical axis of the inclined vehicle is equal to zero. This means that at such an assumed inclination of the vehicle during its cornering no moment is present around the axis of rotation around.
Vor diesem Hintergrund wird weiter vorgeschlagen, dass der Aktuator im Zustand dieses Gleichgewichtes deaktiviert werden kann. Dies meint, dass die durch den Aktuator erzeugte Stellkraft nach dem Einstellen des berechneten Neigungswinkels zumindest teilweise, besonders bevorzugt vollständig abgestellt werden kann. Da das Fahrzeug beim Erreichen des berechneten Neigungswinkels im Kräftegleichgewicht hinsichtlich etwaiger Momente um die Drehachse herum und somit stabil ist, besteht insofern keine Notwendigkeit mehr zur Aufrechterhaltung der Stellkraft seitens des Aktuators. Hiernach wird die aktuelle Neigung des Fahrzeugs zumindest temporär von selbst beibehalten, ohne dass es einer Aktivität des Aktuators erfordert.Against this background, it is further proposed that the actuator can be deactivated in the state of this equilibrium. This means that the adjusting force generated by the actuator after the setting of the calculated inclination angle can be at least partially, particularly preferably completely turned off. Since the vehicle when reaching the calculated angle of inclination in the balance of power with respect to any moments around the axis of rotation and thus is stable, there is thus no longer a need to maintain the actuating force on the part of the actuator. After that, the current inclination of the vehicle is maintained at least temporarily by itself, without requiring any activity of the actuator.
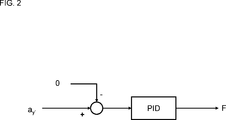
Der sich hieraus ergebende Vorteil liegt zunächst in einer überaus einfachen und damit günstigen Möglichkeit zur Regelung sowie Steuerung des Neigefahrwerks. Aufgrund der nur geringen Anforderungen hinsichtlich der notwendigen Erfassungsmittel kann eine entsprechend günstige Sensorkonfiguration gewählt werden. Durch den Wegfall mitunter aufwendiger und entsprechende Rechenleistung erfordernder Umrechnungen zwischen dem globalen Koordinatensystem und dem Fahrzeugkoordinatensystem ist eine insgesamt vereinfachte und insbesondere schnellere Kontrolle des Neigungswinkels ermöglicht, bei gleichzeitiger Kontrollschleifenstabilität. Hierzu kann beispielsweise ein einfacher PID-Regler Verwendung finden.The resulting advantage is initially in a very simple and thus favorable way to control and control of the tilting chassis. Due to the low requirements with regard to the necessary detection means, a correspondingly favorable sensor configuration can be selected. The elimination of sometimes complicated and corresponding computing power requiring conversions between the global coordinate system and the vehicle coordinate system is a total simplified and in particular faster control of the inclination angle allows, while control loop stability. For this purpose, for example, a simple PID controller can be used.
Der erfindungsgemäße Ansatz kann daher vorsehen, das Fahrzeug grundsätzlich in eine Position zu regeln, in der keine stationäre Stellkraft durch den Aktuator benötigt wird. Dieser Ansatz kann auch als "umgekehrte Pendelsteuerung" bezeichnet werden.The approach according to the invention can therefore provide for the vehicle to be fundamentally regulated in a position in which no stationary actuating force is required by the actuator. This approach may also be referred to as "reverse shuttle control".
Als weiterer Vorteil der Erfindung ist die Möglichkeit zur Deaktivierung des Aktuators während stabiler Fahrzustände. Mit einer der Gründe für den hohen Energieverbrauch ist die derzeitige Bereitstellung einer stationären Stellkraft durch den Aktuator, beispielsweise in Form eines stationären Unterstützungsmoments. Selbstverständlich können hierzu auch mechanische Reibungen zwischen verschiedenen bei einer Neigung des Fahrzeugs relativ zueinander verlagerbaren Teile gezählt werden. Neben der Optimierung liegt insbesondere in der zumindest temporär möglichen Abschaltung des Aktuators ein hohes Potential an Energieeinsparung.Another advantage of the invention is the ability to deactivate the actuator during stable driving conditions. One of the reasons for the high energy consumption is the current provision of a stationary actuating force by the actuator, for example in the form of a stationary assist torque. Of course, this also mechanical friction between different at an inclination of the vehicle relative to each other movable parts can be counted. In addition to the optimization is in particular in the at least temporarily possible shutdown of the actuator, a high potential for energy conservation.
Die Ausgestaltung des Aktuators selbst kann hinsichtlich seiner maximal zu erzeugenden Stellkraft erfolgen. So sollte der Aktuator in der Lage sein, den Neigungswinkel beispielsweise bei einem Not-Ausweichmanöver allein einzustellen. Dies mitunter auch gegen eine entgegengesetzte Kraft oder Last durch die aufsitzende Person/en. Selbiges gilt für ein etwaiges Aufrichten des Fahrzeugs bzw. dessen Aufbaus im Stillstand. Gleichwohl muss die erzeugbare Stellkraft keinen Wert übersteigen, welcher sich bei einem die Spurbreite des Fahrzeugs übersteigenden, aus der Zentrifugalbeschleunigung und der Erdbeschleunigung resultierenden Kraftvektor heraus ergibt. Denn dieser würde unweigerlich zu einem Kippen des Fahrzeugs führen, was auch eine höhere mögliche Stellkraft des Aktuators dann nicht mehr verhindern kann. Als weitere Einflussfaktoren zur Festlegung der erzeugbaren Stellkraft wären die maximal mögliche Zentrifugalbeschleunigung und/oder der baulich maximal mögliche Neigungswinkel und/oder die benötigte Dynamik zur Beschleunigung um die Drehachse hinsichtlich der Neigung zu nennen. The configuration of the actuator itself can be carried out with regard to its maximum generating force. Thus, the actuator should be able to adjust the tilt angle, for example, in an emergency evasive maneuver alone. This sometimes also against an opposite force or load by the seated person / s. The same applies to any erection of the vehicle or its construction at a standstill. However, the producible force need not exceed a value which results in a force vector exceeding the track width of the vehicle resulting from the centrifugal acceleration and the gravitational acceleration. Because this would inevitably lead to a tilting of the vehicle, which can no longer prevent a higher possible actuating force of the actuator. Further influencing factors for determining the producible actuating force would be the maximum possible centrifugal acceleration and / or the structurally maximum possible angle of inclination and / or the dynamics required for acceleration about the axis of rotation with respect to the inclination.
Gemäß einer besonders bevorzugten Ausgestaltung kann eine Feed-Back-Steuerung vorgesehen sein. Dies meint, dass der Neigungswinkel des Fahrzeugs entlang des zuvor eingestellten Gleichgewichts kontrolliert wird, sobald sich die Zentrifugalbeschleunigung ay im globalen Koordinatensystem ändert. Mit anderen Worten wird hiernach bei einer Veränderung der Zentrifugalbeschleunigung ein zum beibehalten des Wertes null für die Querbeschleunigung erforderlicher neuer Neigungswinkel berechnet. Folglich wird hierbei die Querbeschleunigung in Bezug auf das Fahrzeugkoordinatensystem als Regel-Input für die Feed-Back-Steuerung verwendet.According to a particularly preferred embodiment, a feed-back control can be provided. This means that the inclination angle of the vehicle is controlled along the previously set equilibrium as soon as the centrifugal acceleration a y changes in the global coordinate system. In other words, hereinafter, when the centrifugal acceleration is changed, a new inclination angle required to maintain the value zero for the lateral acceleration is calculated. Consequently, in this case, the lateral acceleration with respect to the vehicle coordinate system is used as the control input for the feed-back control.
Mögliche Auslöser für die Veränderung der Zentrifugalbeschleunigung sind beispielsweise Beschleunigungs- oder Abbremsvorgänge des Fahrzeugs sowie eine Veränderung des Kurvenradius und damit des Lenkwinkels.Possible triggers for the change in the centrifugal acceleration are, for example, acceleration or deceleration processes of the vehicle and a change in the curve radius and thus the steering angle.
Besagter neu berechneter Neigungswinkel kann dann in vorteilhafter Weise zumindest teilweise durch Aktivieren des Aktuators zur Erzeugung einer hierfür erforderlichen Stellkraft eingestellt werden. Hierfür ist eine bestimmte Menge an Energie erforderlich, um das Fahrzeug bzw. dessen Aufbau um die Neigungsachse herum zu beschleunigen. Selbiges gilt für ein etwaiges Abbremsen der Beschleunigung durch den Aktuator, damit die Verlagerung in dem erforderlichen Neigungswinkel beendet werden kann.Said newly calculated inclination angle can then be set in an advantageous manner, at least partially by activating the actuator to generate a force required for this purpose. For this purpose, a certain amount of energy is required to accelerate the vehicle or its structure around the inclination axis. The same applies to a possible deceleration of the acceleration by the actuator, so that the displacement can be terminated at the required angle of inclination.
Alternativ hierzu kann eine Feed-Forward-Steuerung vorgesehen werden. Dies meint, dass zunächst eine Fahrsituation prognostiziert werden kann, welche eine bestimmte Zentrifugalbeschleunigung erwarten lässt. Daraufhin kann dann bereits im Vorfeld einer tatsächlich eintretenden Fahrsituation ein aufgrund der zu erwartenden Zentrifugalbeschleunigung einzunehmender idealer Neigungswinkel vorberechnet und eingestellt werden. Anschließend kann die eigentliche Steuerung dann gegen diesen vorberechneten idealen Neigungswinkel erfolgen. Hierzu kann auf Basis einer möglichen Abweichung zwischen dem vorberechneten idealen Neigungswinkel und dem aufgrund der tatsächlichen Fahrsituation aktuell erforderlichen Neigungswinkel ein neuer Neigungswinkel berechnet werden. Dieser kann dann in vorteilhafter Weise zumindest teilweise durch Aktivieren des Aktuators zur Erzeugung einer hierfür erforderlichen Stellkraft eingestellt werden.Alternatively, a feed-forward control may be provided. This means that first a driving situation can be predicted, which promises a certain centrifugal acceleration. Then, in advance of an actually occurring driving situation, an ideal inclination angle to be assumed on the basis of the expected centrifugal acceleration can be precalculated and adjusted. Subsequently, the actual control can then take place against this pre-calculated ideal inclination angle. For this purpose, a new inclination angle can be calculated on the basis of a possible deviation between the precalculated ideal inclination angle and the actual required inclination angle due to the actual driving situation. This can then be set in an advantageous manner at least partially by activating the actuator to generate a force required for this purpose.
Selbstverständlich können die zuvor aufgezeigten Ansätze für den Betrieb des Neigefahrwerks in Form der Feed-Back-Steuerung oder Feed-Forward-Steuerung auch miteinander kombiniert werden. Die Kombination kann dabei von den jeweiligen Fahrsituationen abhängig gemacht werden. Weiterhin kann die Vermischung beider Ansätze über Gewichtungsfaktoren erfolgen. Bei den Gewichtungsfaktoren kann es sich um feste Werte handeln. In vorteilhafter Weise können besagte Gewichtungsfaktoren auch variieren, beispielsweise in Abhängigkeit der jeweiligen Fahrzustände.Of course, the above-mentioned approaches for the operation of the tilting suspension in the form of the feed-back control or feed-forward control can also be combined. The combination can be made dependent on the respective driving situations. Furthermore, the mixing of the two approaches can take place via weighting factors. The weighting factors can be fixed values. Advantageously, said weighting factors can also vary, for example as a function of the respective driving conditions.
Die Erfindung sieht vor, dass der Aktuator ein Elektromotor sein kann. Alternativ hierzu kann der Aktuator auch wenigstens einen Elektromotor umfassen. Der Elektromotor ist im Wesentlichen dazu vorgesehen, damit das Fahrzeug bzw. dessen Aufbau um die Drehachse herum beschleunigt werden kann, um den gewünschten Neigungswinkel einzunehmen. In Ergänzung hierzu kann der Elektromotor auch dazu genutzt werden, um die bereits erfolgte Beschleunigung um die Drehachse herum entsprechend zu verzögern und/oder abzubremsen.The invention provides that the actuator can be an electric motor. Alternatively, the actuator may also comprise at least one electric motor. Essentially, the electric motor is provided so that the vehicle or its construction can be accelerated around the axis of rotation in order to assume the desired angle of inclination. In addition to this, the electric motor can also be used to correspondingly delay and / or decelerate the acceleration that has already taken place around the axis of rotation.
In Bezug auf die Anordnung des Elektromotors wird weiterhin vorgeschlagen, diesen als Verbraucher und/oder als Erzeuger elektrischer Energie einzusetzen. Hierzu kann die während des Neigens um die Drehachse herum insbesondere bei der Verzögerung der Beschleunigung vorhandene kinetische Energie genutzt werden. So kann besagte kinetische Energie aus der Drehung auf den Elektromotor übertragen werden, welcher hierdurch in eine Rotation versetzt wird. Diese Rotation kann wiederum herangezogen werden, um elektrische Energie über den somit passiv drehenden Elektromotor zu gewinnen. Besonders bevorzugt kann der Elektromotor sowohl zur aktiven Beschleunigung als auch zur Gewinnung elektrischer Energie eingesetzt werden. Bei der Gewinnung elektrischer Energie durch den Elektromotor erzeugt dieser gleichzeitig einen Widerstand, durch welchen die gewünschte Verzögerung der vorherigen Beschleunigung um die Drehachse herum erfolgt.With regard to the arrangement of the electric motor is further proposed to use this as a consumer and / or as a generator of electrical energy. For this purpose, the kinetic energy present during the tilting about the axis of rotation, in particular during the deceleration of the acceleration, can be utilized. Thus, said kinetic energy can be transferred from the rotation to the electric motor, which is thereby set in rotation. This rotation can in turn be used to gain electrical energy via the thus passively rotating electric motor. Particularly preferably, the electric motor can be used both for active acceleration and for the production of electrical energy. When electrical energy is generated by the electric motor, it simultaneously generates a resistance through which the desired deceleration of the previous acceleration takes place about the axis of rotation.
Insofern kann der Elektromotor nicht nur die benötigte kinetische Energie als Stellkraft für den Neigungswinkel während der rotierenden Beschleunigung bereitstellen, sondern auch die kinetische Energie aus dem Verzögern oder Abbremsen der Rotation innerhalb des möglichen Neigungswinkels quasi zurückerlangen. Die so (zurück-)gewonnene elektrische Energie kann dann in geeigneter Weise akkumuliert werden, beispielsweise über einen Akkumulator. Wenngleich verschiedene Energieverluste während des Betriebs des Neigefahrwerks unvermeidlich sind, kann der Energieverbrauch auf diese Art in Summe dennoch in vorteilhafter Weise weiter reduziert werden. As such, not only can the electric motor provide the required kinetic energy as a pitch force control during rotational acceleration, but it can also, as it were, quasi recover the kinetic energy from decelerating or decelerating the rotation within the possible tilt angle. The electrical energy recovered in this way can then be accumulated in a suitable manner, for example via an accumulator. Although various energy losses are inevitable during the operation of the taillight, energy consumption in this manner can still be advantageously further reduced in total.
Je nach Höhe der erfassten Zentrifugalbeschleunigung ist es denkbar, dass ein erforderlicher Neigungswinkel für das Fahrzeug berechnet wird, welcher den maximalen baulichen Neigungswinkel übersteigt. Nach einer vorteilhaften Weiterentwicklung kann in diesem Fall der zuvor eingestellte maximal mögliche Neigungswinkel gehalten werden, indem der Aktuator zur Erzeugung einer hierfür erforderlichen Stellkraft aktiviert wird. Eine derartige Maßnahme wird insbesondere für einen kurzen Zeitraum als vorteilhaft angesehen. Demgegenüber sieht die Erfindung für derartige Zustände mit andauernder Notwendigkeit zum Halten des maximal möglichen Neigungswinkels andere Lösungen vor, welche entsprechend genutzt werden können.Depending on the magnitude of the detected centrifugal acceleration, it is conceivable that a required angle of inclination for the vehicle is calculated, which exceeds the maximum structural inclination angle. According to an advantageous further development, the previously set maximum possible angle of inclination can be maintained in this case by activating the actuator to generate a required actuating force for this purpose. Such a measure is considered advantageous, in particular for a short period of time. In contrast, the invention provides for such conditions with continuing need to hold the maximum possible angle of inclination before other solutions, which can be used accordingly.
So kann nach einer besonders bevorzugten Weiterbildung der Erfindung ferner eine Bremseinrichtung vorgesehen sein, deren Verzögerungs- und/oder Bremsleistung sich auf die Rotation des Fahrzeugs bzw. dessen Aufbau um die Drehachse herum auswirkt. Mit anderen Worten kann aufgrund des Vorhandenseins einer solchen vorteilhaften Bremseinrichtung ein Neigen des Fahrzeugs um die Drehachse herum wenigstens zum Teil blockiert werden, indem die Bremseinrichtung zumindest teilweise betätigt wird. Auf diese Weise kann beispielsweise ein zu schnelles Umschlagen zwischen unterschiedlichen Neigungswinkel gezielt abgebremst werden.Thus, according to a particularly preferred development of the invention, a braking device may also be provided whose deceleration and / or braking power has an effect on the rotation of the vehicle or its construction about the axis of rotation. In other words, due to the presence of such an advantageous braking device, tilting of the vehicle about the axis of rotation may be at least partially blocked by at least partially actuating the braking device. In this way, for example, a quick turnaround between different angles of inclination can be selectively braked.
Gemäß einer vorteilhaften Weiterentwicklung in Bezug auf die Anordnung der Bremseinrichtung ist vorgesehen, diese zum tatsächlichen Arretieren des aktuell eingestellten Neigungswinkels zu nutzen. Grundsätzlich kann der Aktuator auf diese Weise immer dann deaktiviert werden, wenn die Bremseinrichtung das Arretieren des Fahrzeugs bzw. seines Aufbaus in der jeweils aktuellen Lage um die Drehachse herum übernimmt.According to an advantageous further development with regard to the arrangement of the braking device, it is provided to use these for the actual locking of the currently set angle of inclination. In principle, the actuator can be deactivated in this way whenever the braking device takes over the locking of the vehicle or its construction in the respective current position about the axis of rotation around.
So kann besagte Arretierung beispielsweise bei kleinen Geschwindigkeiten (beispielsweise < 5 km/h) und/oder kleinen Lenkwinkeln erfolgen, während sich das Fahrzeug in seiner aufrechten Ausrichtung befindet. In der aufrechten Ausrichtung liegen die Hochachse der globalen Koordinatensystems und des Fahrzeugkoordinatensystems entsprechend aufeinander oder verlaufen zumindest parallel. Mit anderen Worten kann so das Fahrzeug bis zum Erreichen eines Wertes für die eine Neigung des Fahrzeugs erfordernde Zentrifugalbeschleunigung in seiner aufrechten Ausrichtung durch die Bremseinrichtung arretiert werden. In dieser Ausrichtung weist der Neigungswinkel einen entsprechenden Wert von null auf.For example, said locking may occur at low speeds (eg, <5 km / h) and / or small steering angles while the vehicle is in its upright orientation. In the upright orientation, the vertical axis of the global coordinate system and the vehicle coordinate system are corresponding to each other or at least parallel. In other words, the vehicle can thus be locked in its upright orientation by the braking device until reaching a value for the centrifugal acceleration requiring the inclination of the vehicle. In this orientation, the tilt angle has a corresponding value of zero.
Durch die gleichzeitige oder zeitlich versetzte Deaktivierung des Aktuators sowie der gesamten Neigungsregelung kann eine mitunter hohe Energieeinsparung erzielt werden. Je nach Ausgestaltung der Bremseinrichtung liegt deren Verbrauch an Energie in vorteilhafter Weise dann unterhalb des so möglichen Einsparpotentials.By simultaneously or temporally offset deactivation of the actuator and the entire inclination control, a sometimes high energy savings can be achieved. Depending on the design of the braking device whose consumption of energy is then advantageously below the possible savings potential.
Weiterhin ist vorgesehen, dass das Fahrzeug solange in seiner Neigung mit einem aktuellen Neigungswinkel von ungleich null durch betätigen der Bremseinrichtung arretiert werden kann, bis eine Verstellung des aktuellen Neigungswinkels erforderlich wird. Da auf diese Weise auch in einer geneigten Lage das Halten des aktuellen Neigungswinkels durch die Arretierung über die Bremseinrichtung erfolgt, kann auch während dieser Phase der Aktuator in vorteilhafter Weise deaktiviert werden.Furthermore, it is provided that the vehicle can be locked in its inclination with a current angle of inclination of non-zero by pressing the brake device until an adjustment of the current inclination angle is required. Since in this way, even in an inclined position holding the current angle of inclination is effected by the locking on the braking device, the actuator can be deactivated in an advantageous manner during this phase.
Als weitere vorteilhafte Weiterbildung des Erfindungsgedankens kann die Bremseinrichtung selbstverständlich auch dazu genutzt werden, um das Fahrzeug bzw. dessen Aufbau in dem maximal möglichen Neigungswinkel zu arretieren. Auf diese Weise kann das Fahrzeug auch beim Erreichen des baulich maximal möglichen Neigungswinkels von ungleich null in diesem arretiert werden, indem die Bremseinrichtung entsprechend betätigt wird. Selbiges kann bevorzugt auch für den Fall gelten, dass ein rechnerisch erforderlicher Neigungswinkel berechnet wird, welcher den maximal möglichen Neigungswinkel übersteigt. Auch in diesem Fall wird der maximal mögliche Neigungswinkel zunächst eingestellt und anschließend über die Bremseinrichtung arretiert.As a further advantageous development of the inventive concept, the braking device can of course also be used to lock the vehicle or its construction in the maximum possible angle of inclination. In this way, the vehicle can be locked even when reaching the structurally maximum possible angle of inclination of non-zero in this by the brake device is actuated accordingly. The same can preferably also apply in the case that a computationally required angle of inclination is calculated, which exceeds the maximum possible angle of inclination. Also in this case, the maximum possible angle of inclination is initially set and then locked via the brake device.
Vor dem Hintergrund der vorgenannten Ausführungen kann somit ein beständiges Zusammenspiel von Aktuator und Bremseinrichtung erfolgen, welche sich in ihrer jeweiligen Aktivität abwechseln. Die Übergabe zwischen den beiden Einrichtungen ist dann entsprechend auszuführen, um keine unangenehmen oder gar die Bedienung des Fahrzeugs gefährdenden Übergänge zu erhalten.Against the background of the aforementioned embodiments, a consistent interaction of actuator and braking device can take place, which alternate in their respective activity. The transfer between the two facilities must then be carried out accordingly in order to avoid unpleasant transients or even transient endangering the operation of the vehicle.
Insgesamt ist festzustellen, dass die Neigung des Fahrzeugs bzw. dessen Aufbaus nur bis zu einem baulich festgelegten maximalen Neigungswinkel möglich ist. Insofern ist auch der maximale Wert für die aufgrund der Neigung kompensierbare Zentrifugalbeschleunigung begrenzt. Der maximal mögliche Neigungswinkel kann beispielsweise so eingestellt sein, dass eine maximale Zentrifugalbeschleunigung von 4,0 m/s2 kompensierbar ist. Über diesem Wert ist mitunter auch eine maximal mögliche Haftung der Räder auf dem jeweiligen Untergrund nicht mehr zweifelsfrei gegeben.Overall, it should be noted that the inclination of the vehicle or its construction is possible only up to a structurally determined maximum inclination angle. In this respect, the maximum value for the compensable due to the inclination is also Centrifugal acceleration limited. The maximum possible angle of inclination, for example, be set so that a maximum centrifugal acceleration of 4.0 m / s 2 can be compensated. Over this value, a maximum possible adhesion of the wheels on the respective surface is sometimes no longer certain.
Im Folgenden werden beispielhafte Szenarien für die Übergabe zwischen Aktuator und Bremseinrichtung näher erläutert:
Sofern die maximal kompensierbare Zentrifugalbeschleunigung und der maximal erreichbare Neigungswinkel rechnerisch überschritten sind, kann die Bremseinrichtung während eines konstanten Wertes für den Neigungswinkel betätigt werden. Im Ergebnis wird das Fahrzeug in seiner aktuellen Neigung arretiert.In the following, exemplary scenarios for the transfer between actuator and braking device are explained in more detail:
If the maximum compensatable centrifugal acceleration and the maximum achievable inclination angle are exceeded mathematically, the braking device can be actuated during a constant value for the inclination angle. As a result, the vehicle is locked in its current inclination.
Sobald die Bremseinrichtung aktiviert und das Fahrzeug arretiert ist, kann der Aktuator entsprechend heruntergefahren werden und/oder hinsichtlich seiner zuvor erzeugten Stellkraft auslaufen.Once the braking device is activated and the vehicle is locked, the actuator can be shut down accordingly and / or expire in terms of its previously generated restoring force.
Wird ein Absinken der Zentrifugalbeschleunigung erfasst, deren aktueller Wert sich der maximal kompensierbaren Zentrifugalbeschleunigung nähert, kann der Aktuator erneut aktiviert werden. In diesem Zustand ist der Aktuator in einer Art Bereitschaft, während die Bremseinrichtung noch weiterhin aktiv ist.If a decrease in the centrifugal acceleration is detected, the current value of which approaches the maximum compensatable centrifugal acceleration, the actuator can be reactivated. In this state, the actuator is in a kind of readiness while the brake device is still active.
Fällt der erfasste Wert für die aktuelle Zentrifugalbeschleunigung unterhalb des Wertes für die maximal kompensierbare Zentrifugalbeschleunigung und wird ein unterhalb des eingestellten maximalen Neigungswinkels liegender Wert für den jetzt noch erforderlichen Neigungswinkel berechnet, kann die Bremseinrichtung deaktiviert und damit gelöst werden. Hiernach übernimmt nun der bereits in Bereitschaft stehende Aktuator die Einstellung des neuen berechneten Neigungswinkels.If the detected value for the current centrifugal acceleration falls below the value for the maximum compensatable centrifugal acceleration and a value lying below the set maximum angle of inclination is calculated for the now required angle of inclination, the braking device can be deactivated and thus released. After that, the actuator already in stand-by now takes over the setting of the new calculated tilt angle.
Anschließend erfolgt wieder der weitere Standardbetrieb für das Neigefahrwerk, bei dem der Wert für die Querbeschleunigung senkrecht zur Fahrzeughochachse bei null gehalten wird.Subsequently, the further standard operation for the tilting suspension takes place again, in which the value for the lateral acceleration perpendicular to the vehicle vertical axis is kept at zero.
Das nunmehr vorgestellte Verfahren zum Betrieb eines aktiven Neigefahrwerks ermöglicht dessen überaus einfache und damit kostengünstige Regelung sowie Steuerung. Dank der einfachen Regelvorgaben sind keine aufwendigen Regelungen notwendig, so dass das Verfahren mit der Verarbeitung von nur wenigen Daten zur aktuellen Fahrdynamik auskommt. Insbesondere der Einsatz einer zusätzlichen Bremseinrichtung zur Arretierung der aktuellen Neigung wirkt sich derart entlastend auf den Aktuator aus, dass dieser überaus energieeffizient eingesetzt werden kann.The now presented method for operating an active tilting chassis allows its extremely simple and therefore cost control and control. Thanks to the simple rule specifications, no complex regulations are necessary, so that the method manages with the processing of only a few data on the current driving dynamics. In particular, the use of an additional braking device for locking the current inclination has such a relieving effect on the actuator that it can be used in an extremely energy-efficient manner.
Hier ist es insbesondere das Zusammenspiel von Aktuator und Bremseinrichtung, welches den im Betrieb ansonsten üblichen beständigen Energieverbrauch des Aktuators auf ein Minimum reduziert. Tatsächlich wird so der Aktuator im Wesentlichen nur für das zumindest teilweise Einstellen des jeweils erforderlichen Neigungswinkels aktiviert, während das Beibehalten einer stationären Neigung über eine Arretierung durch die Bremseinrichtung erfolgt. Allenfalls in kurzen Zeitabschnitten wird der Aktuator auch zum reinen Halten der aktuellen Neigung genutzt, in denen eine Aktivierung der Bremseinrichtung nicht sinnvoll erscheint. Durch die Nutzung der auf den Aktuator einwirkenden kinetischen Energie kann dieser ferner auch zur Gewinnung von elektrischer Energie eingesetzt werden, wodurch der Energieverbrauch insgesamt deutlich abgesenkt werden kann.Here it is in particular the interaction of actuator and braking device, which reduces the otherwise usual during operation constant energy consumption of the actuator to a minimum. In fact, the actuator is essentially activated only for the at least partial adjustment of the respectively required angle of inclination, while the maintenance of a stationary inclination takes place via a locking by the braking device. At most, in short periods of time, the actuator is also used to keep the current slope pure, in which an activation of the braking device does not seem to make sense. By using the kinetic energy acting on the actuator, this can also be used for the production of electrical energy, whereby the energy consumption can be significantly reduced overall.
Weiterhin ist die Erfindung auf ein Neigefahrwerk für ein schienenungebundenes Fahrzeug mit wenigstens einem Aktuator gerichtet, welches mindestens drei Räder aufweisen kann. Besonders bevorzugt kann das erfindungsgemäße Neigefahrwerk zur Durchführung des zuvor beschriebenen erfindungsgemäßen Verfahrens genutzt werden.Furthermore, the invention is directed to a tilting suspension for a rail vehicle with at least one actuator, which may have at least three wheels. Particularly preferably, the tilting suspension according to the invention can be used to carry out the method according to the invention described above.
Hierbei ist ein aufgrund einer Zentrifugalbeschleunigung in einer Kurve erforderlicher Neigungswinkel des Fahrzeugs gegenüber einem globalen Koordinatensystem um eine Drehachse herum zumindest teilweise durch eine von dem Aktuator erzeugbare Stellkraft einstellbar. Erfindungsgemäß ist der Neigungswinkel auf Basis aktueller Werte der Zentrifugalbeschleunigung und der Erdbeschleunigung derart berechenbar, dass ein aus diesen resultierender Wert einer Querbeschleunigung in Bezug auf ein gegenüber dem globalen Koordinatensystem um den Neigungswinkel geneigtes Fahrzeugkoordinatensystem gleich null. Weiterhin ist nach dem Einstellen des berechneten Neigungswinkels der Aktuator deaktivierbar.In this case, a required due to a centrifugal acceleration in a curve angle of inclination of the vehicle relative to a global coordinate system about an axis of rotation at least partially adjustable by an actuation force generated by the actuator. According to the invention, the inclination angle based on current values of the centrifugal acceleration and the acceleration due to gravity can be calculated such that a value of a lateral acceleration resulting therefrom with respect to a vehicle coordinate system tilted by the inclination angle relative to the global coordinate system equals zero. Furthermore, after setting the calculated angle of inclination, the actuator can be deactivated.
Die sich daraus ergebenden Vorteile wurden bereits zuvor im Zusammenhang mit dem erfindungsgemäßen Verfahren näher erläutert und gelten für das erfindungsgemäße Neigefahrwerk entsprechend. Aus diesem Grund wird an dieser Stelle auf die vorherigen Ausführungen hierzu verwiesen. The resulting advantages have already been explained in detail in connection with the method according to the invention and apply correspondingly to the tilting suspension according to the invention. For this reason, reference is made at this point to the previous comments on this.
Weitere vorteilhafte Einzelheiten und Wirkungen der Erfindung sind im Folgenden anhand von in den Figuren schematisch dargestellten Ausführungsbeispielen näher erläutert. Es zeigen:Further advantageous details and effects of the invention are explained in more detail below with reference to embodiments schematically illustrated in the figures. Show it:
In den unterschiedlichen Figuren sind gleiche Teile stets mit denselben Bezugszeichen versehen, so dass diese in der Regel auch nur einmal beschrieben werden.In the different figures, the same parts are always provided with the same reference numerals, so that these are usually described only once.
In der hier gezeigten Vorder- oder Rückansicht fällt die Blickrichtung in Richtung einer globalen Längsachse x bzw. einer Fahrzeuglängsachse x' des Fahrzeugs
Zwischen dem in
Auf Höhe des Untergrundes
Die jeweils parallel zur Fahrzeugquerachse x' verlaufenden Komponenten der Zentrifugalbeschleunigung ay und der Erdbeschleunigung g sind zu einer resultierenden Querbeschleunigung ay' zusammengefasst, welche senkrecht zur Fahrzeughochachse z' ausgerichtet ist.The components of the centrifugal acceleration a y and the gravitational acceleration g, which run parallel to the vehicle transverse axis x 'in each case, are combined to form a resulting transverse acceleration a y ', which is aligned perpendicular to the vehicle's vertical axis z '.
Aufgrund der auf das Fahrzeug
Nach dem erfindungsgemäßen Verfahren zum Betrieb des Neigefahrwerks
Erfindungsgemäß wird der Aktuator nach erfolgreichem Einstellen des berechneten Neigungswinkels φ deaktiviert, da sich das System zumindest temporär im Gleichgewicht befindet. Auf diese Weise kann ein mitunter hohes Einsparpotential an elektrischer Energie erreicht werden.According to the invention, the actuator is deactivated after successful setting of the calculated inclination angle φ, since the system is at least temporarily in equilibrium. In this way, a sometimes high potential savings in electrical energy can be achieved.
BezugszeichenlisteLIST OF REFERENCE NUMBERS
- 11
- Fahrzeug (Neigefahrzeug) Vehicle (tilt vehicle)
- 22
-
Neigefahrwerk von
1 Tilting suspension from1 - 33
- Untergrund underground
- 44
-
Fahrzeugachse von
2 , mehrspurigVehicle axle of2 , multi lane - 55
-
Rad von
2 Wheel of2 - 66
-
Rad von
2 Wheel of2 - 77
-
Aufhängungsseite links an
4 Suspension side on left4 - 88th
-
Aufhängungsseite rechts an
4 Suspension side right4 - 99
-
Aufbau von
1 building of1 - ay a y
- Zentrifugalbeschleunigung centrifugal acceleration
- ay' ay '
- Querbeschleunigung lateral acceleration
- FF
- Stellkraft force
- gG
- Erdbeschleunigung acceleration of gravity
- PP
- Drehachse axis of rotation
- SS
- Schwerpunkt main emphasis
- δδ
- Faktor factor
- φφ
- Neigungswinkel zwischen z und z' Inclination angle between z and z '
- φa φ a
- Neigungswinkel aktuell Tilt angle currently
- φi φ i
- Neigungswinkel ideal Tilt angle ideal
- ψψ
- Fahrsituation driving situation
- vv
-
Geschwindigkeit von
1 Speed of1 - xx
- globale Längsachse global longitudinal axis
- x'x '
- Fahrzeuglängsachse vehicle longitudinal axis
- yy
- globale Querachse global transverse axis
- y'y '
- Fahrzeugquerachse Vehicle transverse axis
- zz
- globale Hochachse global vertical axis
- z'z '
- Fahrzeughochachse Vehicle axis
ZITATE ENTHALTEN IN DER BESCHREIBUNG QUOTES INCLUDE IN THE DESCRIPTION
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.This list of the documents listed by the applicant has been generated automatically and is included solely for the better information of the reader. The list is not part of the German patent or utility model application. The DPMA assumes no liability for any errors or omissions.
Zitierte PatentliteraturCited patent literature
- WO 2011/102108 A1 [0006] WO 2011/102108 A1 [0006]
- JP 2011-230727 A [0007] JP 2011-230727 A [0007]
- JP 2012-153349 A [0008] JP 2012-153349 A [0008]
- JP 2006-248489 A [0009] JP 2006-248489A [0009]
- EP 1600313 B1 [0010] EP 1600313 B1 [0010]
- US 2006/0180372 A1 [0011] US 2006/0180372 A1 [0011]
Claims (10)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014217387.6A DE102014217387A1 (en) | 2014-09-01 | 2014-09-01 | Method for operating a tilting chassis and active tilting suspension for a rail-bound vehicle |
| DE202014104120.6U DE202014104120U1 (en) | 2014-09-01 | 2014-09-03 | Active tilting suspension for a trackless vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014217387.6A DE102014217387A1 (en) | 2014-09-01 | 2014-09-01 | Method for operating a tilting chassis and active tilting suspension for a rail-bound vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| DE102014217387A1 true DE102014217387A1 (en) | 2016-03-03 |
Family
ID=55312090
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102014217387.6A Withdrawn DE102014217387A1 (en) | 2014-09-01 | 2014-09-01 | Method for operating a tilting chassis and active tilting suspension for a rail-bound vehicle |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102014217387A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017212165B4 (en) | 2017-07-17 | 2023-11-30 | Ford Global Technologies, Llc | tilting vehicle |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060180372A1 (en) | 2003-08-22 | 2006-08-17 | Bombardier Recreational Products Inc. | Electronic stability system on a three-wheeled vehicle |
| JP2006248489A (en) | 2005-03-14 | 2006-09-21 | Toyota Motor Corp | Stabilizer system for vehicle |
| EP1600313B1 (en) | 2004-05-26 | 2011-08-03 | Toyota Jidosha Kabushiki Kaisha | Stabilizer control device for vehicle |
| WO2011102108A1 (en) | 2010-02-16 | 2011-08-25 | 株式会社エクォス・リサーチ | Vehicle |
| JP2011230727A (en) | 2010-04-30 | 2011-11-17 | Equos Research Co Ltd | Vehicle |
| JP2012153349A (en) | 2011-01-28 | 2012-08-16 | Equos Research Co Ltd | Vehicle |
-
2014
- 2014-09-01 DE DE102014217387.6A patent/DE102014217387A1/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060180372A1 (en) | 2003-08-22 | 2006-08-17 | Bombardier Recreational Products Inc. | Electronic stability system on a three-wheeled vehicle |
| EP1600313B1 (en) | 2004-05-26 | 2011-08-03 | Toyota Jidosha Kabushiki Kaisha | Stabilizer control device for vehicle |
| JP2006248489A (en) | 2005-03-14 | 2006-09-21 | Toyota Motor Corp | Stabilizer system for vehicle |
| WO2011102108A1 (en) | 2010-02-16 | 2011-08-25 | 株式会社エクォス・リサーチ | Vehicle |
| JP2011230727A (en) | 2010-04-30 | 2011-11-17 | Equos Research Co Ltd | Vehicle |
| JP2012153349A (en) | 2011-01-28 | 2012-08-16 | Equos Research Co Ltd | Vehicle |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017212165B4 (en) | 2017-07-17 | 2023-11-30 | Ford Global Technologies, Llc | tilting vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102014217386A1 (en) | Method for operating a tilting chassis and active tilting suspension for a rail-bound vehicle | |
| EP1758776B1 (en) | Method for controlling the braking system of a four-wheel drive motor vehicle | |
| DE102011085423B4 (en) | Device for controlling a moment | |
| WO2008037347A1 (en) | Braking system and method for braking a vehicle with a hybrid drive | |
| EP1843906B1 (en) | Driving dynamics control or regulating system for a two track, two axle motor vehicle | |
| DE102007061900A1 (en) | Lane keeping assistance system for motor vehicle, has control unit regulating steering angle of steerable front wheels by actuator of steering such that steering moment is supplemented or compensated to total steering moment | |
| DE112010005216T5 (en) | VEHICLE BEHAVIOR CONTROL DEVICE | |
| DE112010005698T5 (en) | Driving Motion Control System | |
| DE112021005430T5 (en) | METHOD OF USING BRAKES AND/OR WHEEL MOTOR SPEED AND/OR POWER POWER TO STEER A VEHICLE | |
| WO2007118587A2 (en) | System for influencing the driving behaviour of a vehicle | |
| DE102009019365A1 (en) | System and method for merging a torque vectoring differential with a stability control system | |
| DE102014202230A1 (en) | Method and apparatus for preventing tipping of a steerable vehicle | |
| WO2011076534A1 (en) | Method and device for distributing a driving torque to the wheels of an electrically driven axle of a motor vehicle | |
| EP3019377B1 (en) | Control system and method for operating a motor vehicle | |
| DE102015214176A1 (en) | Method for driver assistance with water smoothness on a road surface | |
| DE102009007357A1 (en) | Active chassis frame controlling method for use in two-axle two-lane motor vehicle, involves providing regulation with respect to transverse dynamic adjacent to servo control with respect to transverse dynamic of vehicle | |
| EP2772374A1 (en) | Operating method for a single-axle roll stabilization system of a two-axle, two-track vehicle | |
| DE202014104120U1 (en) | Active tilting suspension for a trackless vehicle | |
| WO2007118588A1 (en) | Method and device for controlling the driving behavior of a motor vehicle | |
| DE102008034908A1 (en) | Vehicle i.e. car, stabilizing method, involves producing yaw moment of vehicle in such manner that actual characteristics of vehicle is approximated to reference characteristics | |
| DE102012223984A1 (en) | Method for influencing driving dynamics of motor vehicle by using active actuators variable suspension, involves performing control of actuators based on detection of dynamic driving maneuver | |
| DE102018201190A1 (en) | Method for operating a driver assistance system | |
| EP3844040B1 (en) | Method for operating a motor vehicle and corresponding motor vehicle | |
| EP2052884B1 (en) | Method and system for affecting the movement of a vehicle structure on a powered vehicle and vehicle controlled or regulated by its movement processes | |
| DE102014217387A1 (en) | Method for operating a tilting chassis and active tilting suspension for a rail-bound vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R005 | Application deemed withdrawn due to failure to request examination |