CN1530271A - 工业用电动车辆的转向装置 - Google Patents
工业用电动车辆的转向装置 Download PDFInfo
- Publication number
- CN1530271A CN1530271A CNA2003101246778A CN200310124677A CN1530271A CN 1530271 A CN1530271 A CN 1530271A CN A2003101246778 A CNA2003101246778 A CN A2003101246778A CN 200310124677 A CN200310124677 A CN 200310124677A CN 1530271 A CN1530271 A CN 1530271A
- Authority
- CN
- China
- Prior art keywords
- steering
- wheel
- motor
- working fluid
- controller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/07—Supply of pressurised fluid for steering also supplying other consumers ; control thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D11/00—Steering non-deflectable wheels; Steering endless tracks or the like
- B62D11/24—Endless track steering specially adapted for vehicles having both steerable wheels and endless track
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/065—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by specially adapted means for varying pressurised fluid supply based on need, e.g. on-demand, variable assist
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07568—Steering arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07572—Propulsion arrangements
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Power Steering Mechanism (AREA)
Abstract
一个控制器基于一个轮胎偏转角传感器检测到的轮胎偏转角控制左右轮驱动马达使得一对驱动轮绕车辆转弯中心的角速度彼此相等。控制器从轮胎偏转角传感器检测到的轮胎偏转角来确定转向盘转动时转向轮的转向速度。基于该转向速度,控制器控制一个液压控制马达,使一个液压泵以一个与转向速度对应的速率通过一个压力顺序阀向转向助力缸提供工作流体。有了这样的布置,允许车辆进行平稳的转弯。
Description
技术领域
本发明涉及一种工业用电动车辆的转向装置,特别涉及具有全液压动力转向系统的工业用电动车辆的转向装置。
背景技术
例如,在美国专利NO.5,542,490中公开的一种电动平衡叉车有一对被马达驱动的驱动轮,一对转向轮,和一个用于检测转向盘的转向角的转向角传感器。一个控制器基于该转向角确定出转向盘的转向速度,并控制一个液压控制马达以一个与该转向速度对应的转速运行。其结果是,液压泵以一个与该转向速度对应的速率向转向控制阀提供工作流体。
在日本公开专利NO.11-235982披露的转向装置中,一个控制器基于转向盘的角度确定出转向盘的角速度,并控制马达以一个与该角速度对应的速率向液压泵提供工作流体,其中该角速度是通过一个转向盘角度传感器检测的。
通常,在电动叉车上,检测转向盘的转向角,基于该转向角控制左右驱动马达的转速。叉车根据与该转向角对应的推进马达的转速之间显现出来的差别而平稳地转弯。
如上所述,如果当转向盘转动时基于转向盘的转向速度来控制液压泵,需要新安装一个检测器用于检测转向盘的转向速度。其结果是,增加了转向装置的零件数量和转向装置的装配步骤。
发明内容
本发明的目的是提供一种工业用电动车辆的转向装置,它能以一个与转向盘的转向速度对应的速率向转向助力缸提供工作流体。
为达到前述和其它目的,根据本发明的意图,本发明提供一种工业用电动车辆的转向装置。工业用车辆包括一个驱动轮、一个转向盘、和一个转向轮,转向轮的车轮偏转角根据转向盘的旋转而改变。根据转向轮的车轮偏转角控制驱动轮的速度。转向装置有一个检测器、一个转向助力缸和一个控制器。检测器检测车轮偏转角。转向助力缸被提供到该处的工作流体致动并移动转向轮以改变车轮偏转角。控制器基于检测器检测到的车轮偏转角计算转向轮的转向速度,并控制提供给转向助力缸的工作流体的流率。
本发明还提供了另一种工业用电动车辆的转向装置。该工业用车辆包括一对驱动轮,一对驱动马达,一个转向盘,一个转向轮,一个用来检测车轮偏转角的检测器,和一个马达控制器。每一个驱动马达驱动其中一个驱动轮。转向轮的车轮偏转角根据转向盘的旋转而改变。马达控制器基于检测器检测到的车轮偏转角控制驱动马达的速度。转向装置有一个液压控制马达,一个液压泵,一个转向助力缸,一个转向控制阀,一个运算部分和一个油率控制器。液压泵通过液压控制马达驱动,并能够调整排放的工作流体的流率。液压泵排放的工作流体的流率随着液压控制马达的速度改变。转向助力缸被来自液压泵的工作流体致动并移动转向轮以改变车轮偏转角。基于转向盘的旋转,转向控制阀调整从液压泵提供给转向助力缸的工作流体的流率。运算部分基于检测器检测到的车轮偏转角计算转向轮的转向速度。油率控制器根据计算出的转向速度控制液压马达。
从结合附图的下列描述中本发明的其它方面和优点将变得更清楚,下列描述是以举例的方式阐述本发明的原理。
附图说明
参照下列最佳实施方式的描述和附图可以更好地理解本发明及其目的和优点,其中:
图1是一幅示意图,表示根据本发明的第一种实施方式的叉车的转向装置;
图2是图1所示的叉车的平面示意图;
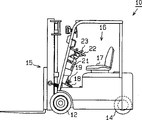
图3是图1所示的叉车的侧面正视示意图;
图4是图1所示的转向装置的电路构造的框图;
图5是一幅图表,表示图1所示转向装置中用来设定马达转速的图;
图6是一幅示意图,表示根据本发明的第二种实施方式的转向装置;和
图7是一幅示意图,表示根据本发明的第三种实施方式的转向装置。
具体实施方式
概括在三轮电动平衡叉车10的转向装置中的本发明第一种最佳实施方式将在下面参照附图1至5进行描述。
如图2至3所示,作为一种工业用车辆的叉车10有一对安装在车身11前部的左右驱动轮12、13,和一个安装在车身11后部的单独的转向轮14。左右驱动轮12、13布置在一个固定的公共轴线上。转向轮14位于与左右驱动轮12、13之间的中心位置成直线的位置。
叉车10有一个安装在车身11前端的桅杆设备15和一个位于驱动轮12、13和转向轮14之间的驾驶室16。驾驶室16有一个驾驶员座椅17。
驾驶室16包括一个加速踏板18,一个制动踏板19,一个方向杆20,一个停车制动杆21,一个转向盘22,和多个载荷操纵杆23。
如图1所示,叉车10有全液压动力转向装置30。
动力转向装置30包括一个三相交流感应马达形式的液压控制马达31,一个液压泵32,一个压力顺序阀33,一个转向控制阀34,一个转向助力缸35。
液压泵32被液压控制马达31驱动,能够调整待供应的工作流体的速率。液压泵32向不同的液压缸(未显示)以及转向助力缸35提供工作流体,该液压缸与载荷操纵回路的载荷操纵装置(未显示)相联系。
压力顺序阀33从液压泵32提供的工作流体中抽出许多工作流体使转向助力缸35保持一个预定的液压,并且压力顺序阀将抽出来的工作流体优先供应给转向助力缸35。压力顺序阀33将剩余的工作流体供应给载荷操纵回路的一个控制阀(未显示)。载荷操纵回路控制工作流体向包含桅杆设备15的载荷操纵设备的供应情况。
随着转向盘22转动,转向控制阀34被转向盘操纵。转向控制阀34以一个与转向盘22的转向速度对应的速率,在与转向盘22的转向对应的方向上向转向助力缸35提供工作流体,该工作流体通过压力顺序阀33来自液压泵32。
转向助力缸35是双向作用式,它被来自转向控制阀34的工作流体在基于转向盘22的转向的方向上驱动,在与转向盘22的转向对应的方向上移动连接到活塞35a的齿条35b。转向助力缸35转动小齿轮36绕它自身的轴线在与转向盘22的转向对应的方向上转动,小齿轮36同轴安装在转向轮14的支承轴上并与齿条35b啮合。转向轮14通过小齿轮36向左或右转动,其方向取决于小齿轮36转动的方向。
下面将参照附图4描述本实施方式的电路结构。
车身11在其上支承了一个加速踏板传感器40、一个方向开关41、一个轮胎偏转角传感器42(车轮偏转角检测器)、一个左轮转速传感器43、和一个右轮转速传感器44。
车身11在其中容纳了一个控制器45、一个左马达驱动器46、一个右马达驱动器47、一个左轮驱动马达(推进马达)48、和一个右轮驱动马达(推进马达)49。
一个液压控制马达转速传感器50和一个液压控制马达驱动器51被连接到液压控制马达31。液压控制马达驱动器51被连接到控制器45。控制器45通过液压控制马达驱动器51控制液压控制马达31的转速改变。
在本实施方式中,控制器45被用作马达控制器、运算部分、和油速控制器。
加速踏板传感器40检测对应于加速踏板18的下降位移的踏板下降程度TH,并将检测值输出到控制器45。方向开关41向控制器45输出一个被选择的位置Drc,该位置是空档位置、向前的位置、和向后的位置中任一个,由方向杆20选择。
如图1所示,轮胎偏转角传感器42包括一个安装在转向轮14的旋转轴上的电位计。当转向盘22向左或右转时轮胎偏转角传感器42检测轮胎偏转角(车轮偏转角)Θ,并向控制器45输出检测值。转向轮14从轮胎偏转角Θ=0°转到Θ=90°或Θ=-90°,在0°时车辆直行,在90°时车辆向右转,在-90°时车辆向左转。
左轮转速传感器43检测左驱动轮12的转速,并将检测值输出到左马达驱动器46。同时,右轮转速传感器44检测右驱动轮13的转速,并将检测值输出到右马达驱动器47。
左马达驱动器46和右马达驱动器47有各自的反相电路,将来自电池的直流电转变成三相交流电,并将三相交流电提供给左轮驱动马达48和右轮驱动马达49。
左轮驱动马达48和右轮驱动马达49各自包括三相AC感应马达,分别由左马达驱动器46和右马达驱动器47控制运行。
液压控制马达转速传感器50检测液压控制马达31的马达转速Nh,并将检测值输出给液压控制马达驱动器51。
液压控制马达驱动器51有一个反相电路,将来自电池的直流电转变成三相交流电,并将三相交流电提供给液压控制马达31。
控制器45包括一个微电脑。控制器45获得来自加速踏板传感器40的检测到的踏板下降程度TH的数值。控制器45从方向开关41输入的所选位置Drc检测车辆行驶的方向,该方向是由驾驶员选择的,或者检测一个空档状态。控制器45还获得从轮胎偏转角传感器42检测到的轮胎偏转角Θ的数值,并从检测值确定转向轮14的一个转向速度VΘ。转向速度VΘ基本上与转向盘22转动的速度相关联。通过获取车轮偏转角Θ改变的数量,把它作为时间的函数,计算出转向速度VΘ。
控制器45根据踏板下降程度TH和轮胎偏转角Θ,执行一个已知的速度控制程序,用来控制左轮驱动马达48和右轮驱动马达49,以及用来控制转向轮速度Vst,这是转向轮14的移动速度。
根据该速度控制程序,控制器45首先相对于检测到的当时的踏板下降程度TH的数值为转向轮速度Vst设定一个目标值。例如,控制器45采用一个存储图确定一个目标值。然后,控制器45从目标值为左轮速度Vl和右轮速度Vr确定目标值从而设定转向轮速度Vst。此时,控制器45为左轮速度Vl和右轮速度Vr确定这样的目标值使得左右驱动轮12、13绕车辆转弯中心的角速度等于转向轮14绕转弯中心的角速度。控制器45向左马达驱动器46输出左驱动轮12的转速的目标值,该数值与左驱动轮12的目标值一致,也向右马达驱动器47输出右驱动轮13的转速的目标值,该数值与右驱动轮13的目标值一致。
提供给左马达驱动器46来自控制器45的左驱动轮12的转速的目标值,还提供给它来自左轮转速传感器43的左驱动轮12的转速的检测值。左马达驱动器46根据一个反馈控制程序,基于左驱动轮12的转速检测值和目标值,控制左轮驱动马达48,为此将左轮速度Vl控制到目标值。同样地,提供给右马达驱动器47来自控制器45的右驱动轮13的转速的目标值,还提供给它来自右轮转速传感器44的右驱动轮13的转速的检测值。右马达驱动器47根据一个反馈控制程序,基于右驱动轮13的转速检测值和目标值,控制右轮驱动马达49,为此将右轮速度Vr控制到目标值。
控制器45根据载荷操纵杆23被操作时的位移,执行一个已知的用于控制液压控制马达31的载荷操纵控制程序,从而控制从液压泵32向载荷操纵回路的控制阀供应的工作流体的速率。
当载荷操纵杆23被操作时,控制器45启动液压控制马达31,并以一个预定转速运行液压控制马达31,该转速取决于载荷操纵杆23的位移。
相对于载荷操纵杆23被操作时的位移设定液压控制马达31的马达转速Nh的目标值,该目标值被输出到液压控制马达驱动器51。目标值采用存储图设定。
根据一个反馈控制程序,基于从控制器45输入的马达转速Nh的目标值和从液压控制马达转速传感器50输入的马达转速Nh的检测值,液压控制马达驱动器51控制液压控制马达31,用来将马达转速Nh控制到该目标值。
控制器45基于在转动盘22转动时转向轮14的转向速度VΘ,执行一个转向控制程序来控制液压控制马达31,以便根据转向速度VΘ控制从液压泵32供应到转向助力缸35的工作流体的速率。
当方向杆20转换到向前或向后的位置或者停留在空档位置,如果左轮速度Vl和右轮速度Vr中至少一个不为0,那么控制器45以一个预定的备用转速运行液压控制马达31。换句话说,当车辆从停止状态开始运行或者靠惯性行驶时,控制器45以一个备用转速运行液压控制马达31。
当方向杆20在空档位置并且左轮速度Vl和右轮速度Vr都为0,即使转向速度VΘ不为0,控制器45也以一个备用转速运行液压控制马达31。就是说,甚至当车辆静止而转向盘22转动时,控制器45以一个备用转速运行液压控制马达31。
相对于转向盘22转动时的转向速度VΘ设定液压控制马达31的马达转速Nh的目标值,并将目标值输出到液压控制马达驱动器51。目标值采用例如图5所示的图表M设定。当转向速度VΘ为0,液压控制马达31的转速的目标值设为0。当转向速度VΘ在一个小于预定的第一转向速度V1的范围内,目标值设定到一个预定的备用转速R1。当转向速度VΘ在从第一转向速度V1到预定的第二转向速度V2的范围内,目标值设定到这样一个速度,它与转向速度VΘ(图5中实线曲线表示)成比例。当转向速度VΘ在一个超过第二转向速度V2的范围内,目标值设定到对应于第二转向速度V2的一个转速R2。
将目标值设定到一个大于液压控制马达31的转速(图5中双点划线表示)足够余量的值,在该值液压泵32能够以一个转向盘22的转向速度实际需要的速率供应工作流体。由于基于转向轮14的转向速度VΘ提高了液压控制马达31的可控制性,这将抑制转向轮14随转向盘22的转向所作的转向运动中的延迟。
液压控制马达驱动器51在控制器45输入的马达转速Nh的目标值和液压控制马达转速传感器50输入的马达转速Nh的检测值的基础上,根据反馈控制程序,控制液压控制马达31,从而将马达转速Nh控制在目标值。
当操作载荷操纵杆23和转动转向盘22时,控制器45同时执行如上所述的载荷操纵控制程序和转向控制程序。
下面将描述本发明这样布置的实施方式。
当方向杆20从空档位置转到向前或向后的位置,控制器45启动液压控制马达31以一个备用转速R1旋转。
当压下加速踏板18,控制器45基于踏板下降程度TH控制左轮驱动马达48和右轮驱动马达49的转速。车辆以一个取决于踏板下降程度TH的转向轮速度Vst行驶。
当转向盘22在车辆直行时转动,控制器45在轮胎偏转角传感器42检测到的轮胎偏转角Θ的基础上控制左驱动轮12和右驱动轮13的转速,然后,控制器45向驱动轮12、13给出一个取决于轮胎偏转角Θ的转速差,使得驱动轮12、13相对车辆转弯中心的角速度彼此相等。其结果是,驱动轮12、13以相等的相对车辆转弯中心的角速度运行,允许车辆平稳运行。
当载荷操纵杆23转动,控制器45根据载荷操纵杆23的位移,将液压控制马达31的转速从备用转速R1增大。液压泵32以一个与载荷操纵杆23的位移相当的速率为压力顺序阀33提供工作流体。
由于在转向助力缸35内的压力不变,压力顺序阀33不增大提供给转向助力缸35的工作流体的速率,而是依据载荷操纵杆23的位移增大提供给载荷操作系统的控制阀的工作流体的速率。
其结果是,工作流体以一个与载荷操纵杆23被操作时的位移相对应的速率被提供给受控的载荷操作设备的液压缸,导致载荷操作设备以一个与载荷操纵杆23的位移相对应的速率运行。
当转向盘22向左或右转,转向控制阀34以一个与转向速度对应的速率向转向助力缸35提供工作流体,方向取决于转向盘22的转向。
转向助力缸35通过来自转向控制阀34的工作流体致动,使转向轮14向左或右转,方向取决于转向盘22的转向。
控制器45从轮胎偏转角传感器42检测到的轮胎偏转角Θ来确定转向轮14的转向速度VΘ。在转向速度VΘ的基础上,控制器45将液压控制马达31的转速增大到备用转速R1,以一个对应于转向速度VΘ的速率从液压泵32向压力顺序阀33供应工作流体。
压力顺序阀33在转向助力缸35内的液压变化的基础上控制需要提供给转向助力缸35的工作流体的量,并将余下的工作流体提供给载荷操纵回路的控制阀。
因此,工作流体以一个对应于转向盘22的转向速度的速率被提供给转向助力缸35,用来提供一个转动转向盘22所需的适当的转向力。
本实施方式提供下列优点。
当车辆转弯时为了向左右驱动轮12、13传递一个转速差,控制器45确定转向轮14的转向速度VΘ,该速度对应于转向盘22的转动速度。基于转向速度VΘ,控制器45控制液压控制马达31的转速以一个对应于转向速度VΘ的速率从液压泵32向转向助力缸35供应工作流体。因此,能够以一个对应于转向速度的速率提供工作流体给转向助力缸35而不必检测转向盘22的转向角。
其结果是,工业用电动车辆,它检测转向轮14的轮胎偏转角Θ用来控制左驱动轮12和右驱动轮13,不必在其上安装一个用于检测转向盘22的转向角的传感器。从而,不会导致转向装置的零件数量和转向装置的装配步骤增加。
在全液压动力转向装置中,特别是,由于工作流体从转向控制阀34的泄漏,转向盘22的转向角和转向轮14的轮胎偏转角Θ倾向于彼此不同。因此,检测转向轮14的轮胎偏转角Θ对控制驱动轮12、13的转向和转速就很必要。根据本实施方式,具有全液压动力转向装置的叉车10上的轮胎偏转角Θ被利用而省却了用来检测转向盘22的转向角的传感器。
通过液压控制马达31致动液压泵32,控制器45和液压控制马达驱动器51根据反馈控制程序控制液压控制马达31的马达转速Nh在对应于转向速度VΘ的目标值处。从而,即使由于叉车承载的货物载荷发生变化引起运行中在转向助力缸35上的载荷的量改变,液压控制马达31被控制在一个对应于转向速度VΘ的转速上,以一个对应于转向速度VΘ的速率向转向助力缸35提供工作流体。
因此,由于即使当叉车承载的货物载荷发生变化时转向盘22所需转向力几乎不改变,增加了叉车的可操纵性。
液压泵32给载荷操纵回路和转向助力缸35提供工作流体。压力顺序阀33将来自液压泵32的工作流体仅按照一个所需的量优先提供给转向助力缸35。
因此,即使当转向盘22迅速转动时,由于提供给转向助力缸35的工作流体较少,数量上容易变得不够,转向盘22所需的转向力避免变得过大。这样能够更容易地转动转向盘22。此外,因为液压控制马达31的转速避免增加,运行液压控制马达31消耗的电能减少了。
当转向盘22转动,从轮胎偏转角传感器42检测到的轮胎偏转角Θ确定出转向速度VΘ,控制器45以一个预定备用转速R1运行液压控制马达31。如果转向速度VΘ在一个超过第一转向速度V1的范围内,那么控制器45将液压控制马达31的马达转速Nh的目标值控制在一个高于转向速度VΘ的理论值的目标值处,使得液压泵32将以一个远远高于转向速度VΘ所需的速率提供工作流体。
因此,转向轮14不会在响应转向盘22的转动有一个延迟后才转动。这提高了液压控制马达31基于转向轮14的转向速度VΘ的可操纵性。
下面将参照图6描述本发明的第二种实施方式。本实施方式区别于第一种实施方式的地方仅在于根据图1至5所示的实施方式的动力转向装置30的压力顺序阀33变成了一个分流器60。第二实施方式的那些与第一实施方式相同的部分用相同的附图标记表示并且不在下文中描述。下面将只详细描述分流器60。
如图6所示,分流器60提供一定量的工作流体,该流体来自液压泵32的工作流体,不管转向助力缸35的载荷和液压泵的液压变化多少,并且提供这一定量的工作流体给转向助力缸35。分流器60提供余下量的工作流体给载荷操纵回路的控制阀。
因此,即使当转向盘22迅速转动时,由于提供给转向助力缸35的工作流体较少,数量上容易变得不够,转向盘22所需的转向力避免变得过大。
根据这样布置的本实施方式,零件数量和装配步骤不会增加,操控性增加,液压控制马达31的可操纵性得到改善。
下面将结合图7描述本发明的第三种实施方式。本实施方式区别于第一种实施方式的地方仅在于根据图1至5所示的实施方式的液压控制马达31和液压泵32变成了一个载荷操纵马达61和一个载荷操纵泵62,省去了压力顺序阀33。第三实施方式的那些与第一实施方式相同的部分用相同的附图标记表示并且不在下文中描述。下面将只详细描述载荷操纵马达61和载荷操纵泵62。
如图7所示,载荷操纵泵62通过载荷操纵马达61致动并能调整待供应的工作流体的速率。载荷操纵泵62只向转向助力缸35提供工作流体。
根据这样布置的本实施方式,零件数量和装配步骤数目不会增加,操控性增加,并且载荷操纵马达61的可控制性得到改善。
对本领域那些技术人员而言很明显,在不背离本发明精神和范围的情况下本发明可以表现为很多其它的具体形式。特别是,应当理解本发明可以具体表现成下列形式。
在图1至7所示的实施方式中,控制器45可以基于踏板下降程度TH和轮胎偏转角Θ控制左轮驱动马达48和右轮驱动马达49各自的转速,而不是转向轮速度Vst,来控制左驱动轮12或右驱动轮13的移动速度,在车辆转弯时这种车轮会成为外侧车轮。
特别是,控制器45相对于踏板下降程度TH的检测值为外侧车轮设定了一个目标值,从外侧车轮的目标值为左轮速度Vl和右轮速度Vr分别确定目标值,并分别将目标值输出给马达驱动器46、47。同时,控制器45为左轮速度Vl和右轮速度Vr确定的目标值使得左右驱动轮12、13绕车辆转弯中心的角速度等于转向轮14绕转弯中心的角速度。
在图1至7所示的实施方式中,控制器45可以控制驱动轮12、13之间的中间位置的移动速度或者驾驶室16的移动速度,而不是转向轮速度Vst。
在图1至6所示的实施方式中,液压控制马达31可以包括一个直流马达而不是一个交流感应马达。同样地,在图7所示的实施方式中载荷操纵马达61可以包括一个直流马达。
包含根据本发明的转向装置的工业用电动车辆不限于三轮电动平衡叉车,可以是前伸电动叉车、四轮叉车、斜向电动拖拉机、电动货车或类似车辆。
所以,本实施例和实施方式应当被看作说明性的而非限制性的并且本发明不限于在此给出的细节,可以在所附的权利要求的范围内和等同的情况下作出改变。
Claims (8)
1.一种工业用电动车辆的转向装置,其中工业用车辆包括一驱动轮,一个转向盘,和一转向轮,转向轮的车轮偏转角根据转向盘的旋转而改变,其中根据转向轮的车轮偏转角控制驱动轮的速度,转向装置的特征在于:
一个检测器,用来检测车轮偏转角;
一个转向助力缸,它被提供到该处的工作流体致动并移动转向轮以改变车轮偏转角;
一个控制器,其中控制器基于检测器检测到的车轮偏转角计算转向轮的转向速度,并控制提供给转向助力缸的工作流体的流率。
2.根据权利要求1所述的转向装置,其特征在于:转向轮的转向速度基本上与转向盘旋转的转向速度相关联。
3.一种工业用电动车辆的转向装置,其中工业用车辆包括一对驱动轮,一对驱动马达,一个转向盘,一转向轮,一个用来检测转向轮的车轮偏转角的检测器,和一个马达控制器,其中每个驱动马达驱动该驱动轮之一,其中转向轮的车轮偏转角根据转向盘的旋转而改变,并且其中马达控制器基于检测器检测到的车轮偏转角控制驱动马达的速度,转向装置的特征在于:
一个液压控制马达;
一个液压泵,其中液压泵通过液压控制马达驱动,并能够调整排放的工作流体的流率,并且其中液压泵排放的工作流体的流率根据液压控制马达的速度而改变;
一个转向助力缸,它被来自液压泵的工作流体致动并移动转向轮以改变车轮偏转角;
一个转向控制阀,其中,基于转向盘的旋转,转向控制阀调整从液压泵提供给转向助力缸的工作流体的流率;
一个运算部分,它基于检测器检测到的车轮偏转角计算转向轮的转向速度;和
一个油率控制器,它根据计算出的转向速度控制液压马达。
4.根据权利要求3所述的转向装置,其特征在于:液压马达包括一个交流感应马达,其中油率控制器反馈控制交流感应马达,使得交流感应马达的速度与转向盘的转向速度相关联。
5.根据权利要求3或4所述的转向装置,其特征还在于:一个压力顺序阀,它引导来自液压泵的工作流体,其中压力顺序阀将工作流体优先供应给转向助力缸。
6.根据权利要求3或4所述的转向装置,其特征在于:工业用车辆包括一个由来自液压泵的工作流体驱动的载荷操纵装置,其中转向装置还包括一个压力顺序阀,它引导来自液压泵的工作流体,其中压力顺序阀将工作流体优先供应给转向助力缸而不是载荷操纵装置。
7.根据权利要求3或4所述的转向装置,其特征还在于:一个分流器,它引导来自液压泵的工作流体,其中分流器提供一定量的工作流体给转向助力缸。
8.根据权利要求3或4所述的转向装置,其特征在于:转向轮的转向速度基本上与转向盘转动的转向速度相关联。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP366857/02 | 2002-12-18 | ||
| JP2002366857A JP4062085B2 (ja) | 2002-12-18 | 2002-12-18 | 電気式産業車両の操舵装置 |
| JP366857/2002 | 2002-12-18 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1530271A true CN1530271A (zh) | 2004-09-22 |
| CN100379628C CN100379628C (zh) | 2008-04-09 |
Family
ID=32376268
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2003101246778A Expired - Fee Related CN100379628C (zh) | 2002-12-18 | 2003-12-17 | 工业用电动车辆的转向装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7357215B2 (zh) |
| EP (1) | EP1431162B2 (zh) |
| JP (1) | JP4062085B2 (zh) |
| CN (1) | CN100379628C (zh) |
| DE (1) | DE60306313T3 (zh) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1781795B (zh) * | 2004-10-25 | 2010-06-16 | 三菱自动车工业株式会社 | 车辆转弯状态控制装置 |
| CN101022986B (zh) * | 2004-09-28 | 2010-12-15 | 卢克汽车-液压系统两合公司 | 转向助力系统 |
| CN103112487A (zh) * | 2013-01-10 | 2013-05-22 | 青岛科技大学 | 车辆线控转向方向盘装置 |
| CN106965854A (zh) * | 2017-03-29 | 2017-07-21 | 星光农机股份有限公司 | 传动控制装置 |
| CN106976479A (zh) * | 2016-01-15 | 2017-07-25 | 迪尔公司 | 具有步进马达的车辆引导系统 |
| CN106976481A (zh) * | 2017-03-29 | 2017-07-25 | 星光农机股份有限公司 | 转向传动结构 |
| CN107200060A (zh) * | 2017-07-11 | 2017-09-26 | 安徽合力股份有限公司 | 一种电动叉车的转向控制装置及其控制方法 |
| CN108443247A (zh) * | 2018-04-03 | 2018-08-24 | 安徽合力股份有限公司 | 叉车独立液压转向系统 |
| CN110799409A (zh) * | 2017-06-29 | 2020-02-14 | 蒂森克虏伯普利斯坦股份公司 | 具有扭矩矢量化和集成防滑控制的线控转向系统 |
| CN111824259A (zh) * | 2020-07-30 | 2020-10-27 | 三一汽车起重机械有限公司 | 车桥对中控制系统及起重机 |
| CN112689592A (zh) * | 2018-09-03 | 2021-04-20 | 三菱罗吉斯耐克特欧洲公司 | 叉车的转向 |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006124127A (ja) * | 2004-10-29 | 2006-05-18 | Mitsubishi Heavy Ind Ltd | バッテリー式フォークリフト |
| DE102005022089B4 (de) * | 2005-05-12 | 2019-11-07 | Linde Material Handling Gmbh | Hydraulische Lenkeinrichtung |
| JP4544197B2 (ja) * | 2005-05-17 | 2010-09-15 | 日産自動車株式会社 | 産業車両の油圧駆動装置 |
| JP4687236B2 (ja) | 2005-05-17 | 2011-05-25 | 日産自動車株式会社 | 産業車両の油圧制御装置 |
| JP2007099038A (ja) * | 2005-10-03 | 2007-04-19 | Hitachi Ltd | パワーステアリング装置 |
| WO2008005886A2 (en) * | 2006-07-07 | 2008-01-10 | Hydro-Gear Limited Partnership | Electronic steering control apparatus |
| US8950520B2 (en) | 2006-07-07 | 2015-02-10 | Hydro-Gear Limited Partnership | Front steering module for a zero turn radius vehicle |
| JP5065632B2 (ja) * | 2006-07-13 | 2012-11-07 | 日産フォークリフト株式会社 | 産業車両の油圧制御装置 |
| JP4389912B2 (ja) | 2006-09-12 | 2009-12-24 | 日産自動車株式会社 | 産業車両の油圧制御装置 |
| US7891458B2 (en) * | 2006-12-21 | 2011-02-22 | Hitachi Construction Machinery Co., Ltd. | Steering system for engineering vehicle |
| EP2098437B1 (en) * | 2006-12-26 | 2017-11-15 | KCM Corporation | Steering system for working vehicle |
| US8844665B2 (en) * | 2007-12-27 | 2014-09-30 | Swissauto Powersport Llc | Skid steered all terrain vehicle |
| JP2010095354A (ja) * | 2008-10-17 | 2010-04-30 | Sumitomonacco Materials Handling Co Ltd | フォークリフトの速度制限装置 |
| CN102341293B (zh) * | 2009-03-12 | 2014-02-12 | R.H.谢帕德股份有限公司 | 解除动力转向助力的方法及使用该方法的动力转向系统 |
| WO2011002053A1 (ja) * | 2009-07-02 | 2011-01-06 | 日立建機株式会社 | 運搬車両 |
| GB2478957B (en) * | 2010-03-24 | 2014-07-09 | Penny & Giles Controls Ltd | A controller and control method for a motorised vehicle |
| DE102010016470B4 (de) | 2010-04-16 | 2012-03-08 | Hubtex Maschinenbau Gmbh & Co. Kg | Lenkverfahren und Lenksysteme für ein Flurförderzeug |
| DE102011111420B4 (de) * | 2011-08-23 | 2015-11-19 | Audi Ag | Verfahren zur Steuerung lenkbarer Hinterräder eines Kraftfahrzeugs und Kraftfahrzeug |
| RU2531425C2 (ru) * | 2012-01-17 | 2014-10-20 | Республиканское Конструкторское Унитарное Предприятие "Гскб По Зерноуборочной И Кормоуборочной Технике" | Гидравлическая система рулевого управления транспортного средства на гусеничном ходу |
| CN102649446B (zh) * | 2012-04-17 | 2013-12-04 | 杭州葛高机械有限公司 | 履带行走机械全液压方向盘转向制动控制装置 |
| CN102649448B (zh) * | 2012-04-17 | 2014-07-02 | 杭州葛高机械股份有限公司 | 全液压方向盘行星转向履带拖拉机 |
| CN103661001B (zh) * | 2013-12-10 | 2015-11-18 | 武汉新能车桥技术发展有限公司 | 双轮驱动系统差速控制方法及系统 |
| US9238477B2 (en) | 2014-03-03 | 2016-01-19 | Xtreme Manufacturing, Llc | Method and system for a lift device having independently steerable wheels |
| CN104787111B (zh) * | 2015-04-23 | 2018-04-24 | 圣邦集团有限公司 | 一种用于转向系统的控制阀 |
| JP6428538B2 (ja) * | 2015-09-14 | 2018-11-28 | 株式会社豊田自動織機 | 産業車両の操舵制御装置及び産業車両の操舵制御方法 |
| CN105329317B (zh) * | 2015-11-17 | 2017-12-19 | 吉林大学 | 汽车爆胎方向盘转角限制和分轮制动联合控制系统及方法 |
| DE102016113260B4 (de) * | 2016-07-19 | 2022-05-25 | Hubtex Maschinenbau Gmbh & Co. Kg | Betriebsverfahren und Flurförderzeug |
| CN106882263A (zh) * | 2017-03-01 | 2017-06-23 | 汤广禹 | 一种新型汽车转向辅助装置 |
| JP6483796B1 (ja) * | 2017-12-22 | 2019-03-13 | 三菱ロジスネクスト株式会社 | 電動車 |
| FR3101867B1 (fr) * | 2019-10-10 | 2021-10-08 | Manitou Bf | Engin de manutention de charge équipé d'un moteur thermique et procédé de commande de la vitesse en rotation du moteur thermique d'un tel engin |
| EP4423001A1 (en) * | 2021-10-26 | 2024-09-04 | Ethium, LLC | Forklift kit with interchangeable power system conversion units |
| CN114132314B (zh) * | 2021-12-20 | 2023-09-01 | 杭叉集团股份有限公司 | 一种工业车辆转弯降速控制系统及其方法 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4557343A (en) * | 1984-08-08 | 1985-12-10 | Towmotor Corporation | Power steering control apparatus and method |
| US4703819A (en) † | 1985-02-27 | 1987-11-03 | Nissan Motor Co., Ltd. | Full hydraulic power steering system |
| DE3709593A1 (de) † | 1986-03-24 | 1987-10-01 | Linde Ag | Lenkeinrichtung mit hilfslenkkraftunterstuetzungseinrichtung |
| DE3622218A1 (de) † | 1986-07-02 | 1988-01-14 | Still Gmbh | Kraftfahrzeug, vorzugsweise flurfoerderzeug, mit einer hydraulischen arbeitseinrichtung und mit einer hydraulischen lenkhilfskraftunterstuetzungseinrichtung |
| DE3709704A1 (de) † | 1987-03-25 | 1988-10-13 | Steinbock Gmbh | Hydraulisch betaetigte lenkeinrichtung |
| JPH0345471A (ja) † | 1989-07-14 | 1991-02-27 | Komatsu Ltd | 全油圧式ステアリングシステムのハンドル位置補正装置 |
| US5513720A (en) * | 1991-01-23 | 1996-05-07 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Power steering apparatus for vehicle |
| SE504084C2 (sv) † | 1991-09-26 | 1996-11-04 | Kalmar Last Maskin Verkstad Ab | Servoaggregat för fordon |
| DE4301581A1 (de) † | 1993-01-21 | 1994-07-28 | Still Gmbh | Hydraulische Lenkregelung bei einem Elektrofahrzeug |
| GB2276596B (en) * | 1993-03-22 | 1996-10-09 | Crown Gabelstapler Gmbh | Steering systems for forklift trucks |
| JP3506810B2 (ja) | 1995-06-19 | 2004-03-15 | ユニシア ジェーケーシー ステアリングシステム株式会社 | 電動ポンプ式動力舵取装置 |
| KR0156433B1 (ko) * | 1995-09-19 | 1998-10-15 | 석진철 | 전유압조향시스템의 비상조향장치 |
| JPH10244951A (ja) | 1997-03-07 | 1998-09-14 | Meidensha Corp | フォークリフト |
| US6226582B1 (en) * | 1997-07-21 | 2001-05-01 | Sre Controls, Inc. | Integrated control for electric lift trucks |
| DE19733096C2 (de) | 1997-07-31 | 2000-05-11 | Mannesmann Vdo Ag | Verfahren und Anordnung zur Regelung einer Hilfskrafteinrichtung in einem Kraftfahrzeug |
| JPH1159467A (ja) * | 1997-08-26 | 1999-03-02 | Koyo Seiko Co Ltd | パワーステアリング装置 |
| JPH11235982A (ja) | 1997-12-16 | 1999-08-31 | Toyota Autom Loom Works Ltd | フォ−クリフトの油圧システム |
| US6135231A (en) * | 1998-04-27 | 2000-10-24 | Sauer Inc. | Method and means for providing a steer-assist and anti-spin system for hydrostatically propelled vehicles |
| US6101435A (en) * | 1998-06-01 | 2000-08-08 | Ford Global Technologies, Inc. | Method for compensating a power assist steering system control signal |
| DE19828816C2 (de) * | 1998-06-27 | 2001-04-19 | Daimler Chrysler Ag | Servolenkung für Kraftfahrzeuge |
| JP3916355B2 (ja) * | 1998-12-28 | 2007-05-16 | 株式会社ジェイテクト | 動力舵取装置 |
| JP2001001932A (ja) | 1999-06-23 | 2001-01-09 | Komatsu Forklift Co Ltd | フォークリフトの操舵制御装置 |
| JP2001316096A (ja) * | 2000-02-28 | 2001-11-13 | Toyota Industries Corp | 産業車両の油圧装置 |
| JP4670161B2 (ja) * | 2000-07-13 | 2011-04-13 | マツダ株式会社 | 自動車の電動パワーステアリング装置 |
| JP3884909B2 (ja) * | 2000-12-06 | 2007-02-21 | 株式会社日立製作所 | 電気車及びその制御装置 |
| JP3521873B2 (ja) * | 2001-01-17 | 2004-04-26 | トヨタ自動車株式会社 | 車両用自動変速機の油圧制御装置 |
-
2002
- 2002-12-18 JP JP2002366857A patent/JP4062085B2/ja not_active Expired - Fee Related
-
2003
- 2003-12-17 DE DE60306313.6T patent/DE60306313T3/de not_active Expired - Lifetime
- 2003-12-17 US US10/740,341 patent/US7357215B2/en not_active Expired - Fee Related
- 2003-12-17 CN CNB2003101246778A patent/CN100379628C/zh not_active Expired - Fee Related
- 2003-12-17 EP EP03028945.8A patent/EP1431162B2/en not_active Expired - Lifetime
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101022986B (zh) * | 2004-09-28 | 2010-12-15 | 卢克汽车-液压系统两合公司 | 转向助力系统 |
| CN1781795B (zh) * | 2004-10-25 | 2010-06-16 | 三菱自动车工业株式会社 | 车辆转弯状态控制装置 |
| CN103112487A (zh) * | 2013-01-10 | 2013-05-22 | 青岛科技大学 | 车辆线控转向方向盘装置 |
| CN106976479B (zh) * | 2016-01-15 | 2021-01-22 | 迪尔公司 | 具有步进马达的车辆引导系统 |
| CN106976479A (zh) * | 2016-01-15 | 2017-07-25 | 迪尔公司 | 具有步进马达的车辆引导系统 |
| CN106965854B (zh) * | 2017-03-29 | 2022-11-11 | 星光农机股份有限公司 | 传动控制装置 |
| CN106976481A (zh) * | 2017-03-29 | 2017-07-25 | 星光农机股份有限公司 | 转向传动结构 |
| CN106965854A (zh) * | 2017-03-29 | 2017-07-21 | 星光农机股份有限公司 | 传动控制装置 |
| CN106976481B (zh) * | 2017-03-29 | 2022-11-11 | 星光农机股份有限公司 | 转向传动结构 |
| CN110799409A (zh) * | 2017-06-29 | 2020-02-14 | 蒂森克虏伯普利斯坦股份公司 | 具有扭矩矢量化和集成防滑控制的线控转向系统 |
| US11505245B2 (en) | 2017-06-29 | 2022-11-22 | Thyssenkrupp Presta Ag | Steer-by-wire steering system with torque vectoring and integrated anti-slip control |
| CN107200060A (zh) * | 2017-07-11 | 2017-09-26 | 安徽合力股份有限公司 | 一种电动叉车的转向控制装置及其控制方法 |
| CN107200060B (zh) * | 2017-07-11 | 2023-08-04 | 安徽合力股份有限公司 | 一种电动叉车的转向控制装置及其控制方法 |
| CN108443247A (zh) * | 2018-04-03 | 2018-08-24 | 安徽合力股份有限公司 | 叉车独立液压转向系统 |
| CN108443247B (zh) * | 2018-04-03 | 2023-07-14 | 安徽合力股份有限公司 | 叉车独立液压转向系统 |
| CN112689592A (zh) * | 2018-09-03 | 2021-04-20 | 三菱罗吉斯耐克特欧洲公司 | 叉车的转向 |
| CN112689592B (zh) * | 2018-09-03 | 2023-11-17 | 三菱罗吉斯耐克特欧洲公司 | 叉车的转向 |
| CN111824259A (zh) * | 2020-07-30 | 2020-10-27 | 三一汽车起重机械有限公司 | 车桥对中控制系统及起重机 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE60306313T3 (de) | 2014-12-24 |
| EP1431162B1 (en) | 2006-06-21 |
| JP2004196110A (ja) | 2004-07-15 |
| CN100379628C (zh) | 2008-04-09 |
| US20040149498A1 (en) | 2004-08-05 |
| DE60306313D1 (de) | 2006-08-03 |
| US7357215B2 (en) | 2008-04-15 |
| EP1431162B2 (en) | 2014-10-22 |
| DE60306313T2 (de) | 2007-06-21 |
| JP4062085B2 (ja) | 2008-03-19 |
| EP1431162A3 (en) | 2004-12-15 |
| EP1431162A2 (en) | 2004-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1530271A (zh) | 工业用电动车辆的转向装置 | |
| CN1966333A (zh) | 动力转向装置 | |
| CN1126707C (zh) | 油压驱动式叉式升降车 | |
| JP5498858B2 (ja) | ホイールローダ | |
| JP6307695B2 (ja) | 車両 | |
| CN1008345B (zh) | 滑移转向车辆的摆动控制系统 | |
| KR101311226B1 (ko) | 독립휠 제어형 다축 조향장치 | |
| CN103429875A (zh) | 作业车辆的驱动控制装置 | |
| JP6282082B2 (ja) | フォークリフト用のモータ駆動装置およびそれを用いた電動フォークリフト | |
| JP2010052493A (ja) | ハイブリッド車両 | |
| CN1833931A (zh) | 轮式车辆的制动力控制设备 | |
| JP2004330998A (ja) | 全方向操舵式フォークリフトの走行規制装置 | |
| JP6234661B2 (ja) | 転舵機構等の制御装置 | |
| JP3406271B2 (ja) | 産業用車両の走行駆動装置 | |
| KR102681385B1 (ko) | 인휠모터 차량의 스티어링 부하 축소를 위한 제어 방법 | |
| JP5992237B2 (ja) | 転舵アシスト制御装置 | |
| JP2015192570A (ja) | 電動フォークリフトおよびその走行用モータ駆動装置 | |
| JP3140008B2 (ja) | 油圧駆動式フォークリフト | |
| WO2016143471A1 (ja) | 車両 | |
| KR100660981B1 (ko) | 유압구동식 포크리프트 | |
| JP5047630B2 (ja) | 舵取り制御を有する作業機械 | |
| JP2002234387A (ja) | 産業用車両の尾灯制動灯制御装置 | |
| JPH09110392A (ja) | 産業車両 | |
| JP2005231412A (ja) | パワーステアリングシステム | |
| JP2006225988A (ja) | ホイール式建設機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20080409 Termination date: 20161217 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |