CN115667716A - 具有高扭矩驱动器的泵 - Google Patents
具有高扭矩驱动器的泵 Download PDFInfo
- Publication number
- CN115667716A CN115667716A CN202180026336.3A CN202180026336A CN115667716A CN 115667716 A CN115667716 A CN 115667716A CN 202180026336 A CN202180026336 A CN 202180026336A CN 115667716 A CN115667716 A CN 115667716A
- Authority
- CN
- China
- Prior art keywords
- common axis
- rotor
- pump
- coils
- pump apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C15/00—Component parts, details or accessories of machines, pumps or pumping installations, not provided for in groups F04C2/00 - F04C14/00
- F04C15/0057—Driving elements, brakes, couplings, transmission specially adapted for machines or pumps
- F04C15/008—Prime movers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B15/00—Pumps adapted to handle specific fluids, e.g. by selection of specific materials for pumps or pump parts
- F04B15/02—Pumps adapted to handle specific fluids, e.g. by selection of specific materials for pumps or pump parts the fluids being viscous or non-homogeneous
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/03—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B9/00—Piston machines or pumps characterised by the driving or driven means to or from their working members
- F04B9/02—Piston machines or pumps characterised by the driving or driven means to or from their working members the means being mechanical
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C3/00—Rotary-piston machines or pumps, with non-parallel axes of movement of co-operating members, e.g. of screw type
- F04C3/02—Rotary-piston machines or pumps, with non-parallel axes of movement of co-operating members, e.g. of screw type the axes being arranged at an angle of 90 degrees
- F04C3/04—Rotary-piston machines or pumps, with non-parallel axes of movement of co-operating members, e.g. of screw type the axes being arranged at an angle of 90 degrees of intermeshing engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D13/00—Pumping installations or systems
- F04D13/02—Units comprising pumps and their driving means
- F04D13/06—Units comprising pumps and their driving means the pump being electrically driven
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D25/00—Pumping installations or systems
- F04D25/02—Units comprising pumps and their driving means
- F04D25/06—Units comprising pumps and their driving means the pump being electrically driven
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/22—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating around the armatures, e.g. flywheel magnetos
- H02K21/227—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating around the armatures, e.g. flywheel magnetos having an annular armature coil
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K37/00—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors
- H02K37/10—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type
- H02K37/12—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type with stationary armatures and rotating magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/06—Means for converting reciprocating motion into rotary motion or vice versa
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2240/00—Components
- F04C2240/10—Stators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2240/00—Components
- F04C2240/20—Rotors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2240/00—Components
- F04C2240/40—Electric motor
- F04C2240/401—Linear motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
- H02K16/04—Machines with one rotor and two stators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/12—Transversal flux machines
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Reciprocating Pumps (AREA)
Abstract
一种流体移动设备(12)包括具有转子(42)和定子(44)的电动机(24)以及流体移位构件(34)。转子(42)相对于定子(44)在公共轴线(CA)上旋转以产生旋转输出。旋转输出被提供给流体移位构件(34)以向流体移位构件(34)提供动力,以执行沿着公共轴线线性地移动和围绕公共轴线旋转中的一项。定子(44)包括多个线圈(52),所述线圈被配置为为转子(42)的旋转提供动力。所述多个线圈(52)沿着所述公共轴线(CA)排列。
Description
相关申请的交叉引用
本申请要求2020年3月31日递交的美国临时申请No.63/003,021、名称为“具有高扭矩驱动器的泵”的权益,所述美国临时申请的全部内容以引用的方式并入本文中。
技术领域
本公开内容涉及泵系统。更具体地,本公开内容涉及用于在各种应用中使用的流体移动设备(例如泵设备)的驱动器。
背景技术
通常,被泵送的流体由正排量泵置于压力下。在涂敷应用中,泵将涂料置于压力下,并通过柔性软管在压力下输出涂料。喷枪用于分配涂料,喷枪连接到软管的与泵相反的端部。容积泵通常安装在驱动器外壳上并由电动机驱动。泵杆附接到往复驱动器,所述往复驱动器驱动泵杆的往复运动,从而将流体从容器中拉入泵中,然后从泵向下游驱动流体。在一些情况下,电动机可以为泵提供动力。电动机通过齿轮减速系统连接到泵上,所述齿轮减速系统增加了电动机产生的扭矩。
发明内容
根据本公开内容的一个方面,一种用于泵送流体的泵设备包括:被配置为产生旋转输出的电动机、被配置为将来自电动机的旋转输出转换为线性往复输出的驱动器、以及被配置为接收来自驱动器的线性往复输出以沿着公共轴线性地往复运动以泵送流体。所述电动机包括:转子,所述转子被配置为围绕公共轴线旋转,所述转子包括多个磁体,每个磁体均伸长并且平行于所述公共轴线延伸,所述多个磁体围绕所述公共轴线环形地排列;以及定子,所述定子被配置为被通电以产生使转子旋转的磁通。所述定子包括多个线圈,所述多个线圈沿着所述公共轴线排列,所述多个线圈中的每个线圈均与所述公共轴线同轴;以及多个沿着公共轴线排列的圆形突刺阵列,所述多个圆形突刺阵列中的每个圆形突刺阵列分别包括与公共轴线同轴排列成圆形的多个突刺(spur),所述多个圆形突刺阵列的所有突刺被配置为被多个线圈中的线圈同时极化以产生磁通,以使转子相对于定子旋转。
根据本公开内容的附加或替代方面,一种泵设备包括:电动机,所述电动机包括定子和绕公共轴线同轴地旋转的转子,所述定子包括沿着公共轴线排列的多个线圈;流体移位构件,所述流体移位构件被配置为沿着所述公共轴线线性地往复运动以泵送流体;以及驱动机构,其轴向地位于电动机和活塞之间,其将来自电动机的旋转输出转换为驱动流体位移构件的线性往复输出。驱动机构被配置为使得:所述电动机每转过第一数量的完整转数,所述流体移位构件就行进一英寸,其中,所述第一数量在0.9-3.0转的范围内,包括端值(inclusive)。
根据本公开内容的另一个附加或替代方面,一种泵设备包括:电动机,所述电动机包括定子和绕公共轴线旋转的转子,所述定子包括沿着公共轴线排列的多个线圈;流体移位构件,所述流体移位构件被配置为沿着公共轴线CA线性地往复运动以泵送流体;以及驱动机构,其位于电动机和活塞之间,将电动机的旋转输出转换为驱动活塞的线性往复输出。驱动机构被配置为使得:所述电动机每转过X数量的完整转数,所述流体位移构件就完成一个泵冲程,其中,X在1-3的范围内,包括端值。
根据本公开内容的又一个附加或替代方面,一种泵设备包括:电动机,所述电动机包括定子和围绕公共轴线旋转的转子,所述定子包括沿着公共轴线排列的多个线圈,每个线圈围绕和延伸并与公共轴线同轴;圆柱形活塞,所述活塞与所述公共轴线同轴,所述活塞被配置为沿着所述公共轴线线性地往复运动以泵送流体;以及驱动机构,其位于电动机和活塞之间,将电动机的旋转输出转换为驱动活塞的线性往复输出。
根据本公开内容的又一个附加或替代方面,一种用于移动液体的设备包括被配置为产生旋转输出的电动机和被配置为通过转子围绕公共轴线旋转以移动液体的流体移位构件。电动机包括:转子,其被配置为围绕公共轴线旋转,所述转子包括多个磁体,每个磁体均伸长并且平行于公共轴线延伸,多个磁体围绕公共轴线环形地排列;以及定子,其被配置为被通电以产生使转子旋转的磁通。所述定子包括:多个线圈,所述多个线圈沿着所述公共轴线排列,所述多个线圈中的每个线圈均与所述公共轴线同轴;多个圆形突刺阵列,其沿着公共轴线排列,所述多个圆形突刺阵列中的每个圆形突刺阵列分别包括与公共轴线同轴排列成圆形的多个突刺,所述多个圆形突刺均被配置为被多个线圈中的线圈同时极化以产生磁通,从而使转子相对于定子旋转。
根据本公开内容的又一个附加或替代方面,一种用于移动液体的设备包括被配置为产生旋转输出的电动机和被配置为通过电动机的输出移动的流体移位构件。所述电动机包括转子,所述转子被配置为围绕公共轴线旋转,所述转子包括多个磁体,每个磁体均伸长并且平行于所述公共轴线延伸,所述多个磁体围绕所述公共轴线环形地排列;定子被配置为被通电以产生使转子旋转的磁通。所述定子包括多个线圈,所述多个线圈沿着所述公共轴线排列,所述多个线圈中的每个线圈均与所述公共轴线同轴。多个圆形突刺阵列沿着公共轴线排列,所述多个圆形突刺阵列中的每个圆形突刺阵列分别包括与公共轴线同轴排列成圆形的多个突刺,所述多个圆形突刺均被配置为被多个线圈中的线圈同时极化以产生磁通,以使转子相对于定子旋转。与多个线圈中的任何一个线圈相比,定子的至少一个突刺更靠近流体移位构件。
附图说明
图1A是泵设备的正视示意性框图。
图1B是图1A的泵设备的侧视示意性框图。
图2是泵设备的示意性框图。
图3A是在图1A和图1B的泵系统中使用的泵组件的立体图。
图3B是沿着图3A中的线B-B截取的立体剖视图。
图3C是沿着图3A中的线B-B截取的第一正剖视图。
图4A是孤立地示出电动机的一部分的立体图。
图4B是图4A所示的电动机的定子的立体图。
图5A是图4B所示的定子的相组件的立体图。
图5B是图5A所示的相组件的立体图,其中,为了清楚起见,移除了磁通环。
图6A是示出流过相组件的电流的放大剖视图。
图6B是示出与图6A所示电流相反的电流的放大剖视图。
图6C是示出电动机的转子部分的部件的磁极性的放大端面图。
图7是泵设备的示意性框图。
图8是泵设备的示意性框图。
图9是泵设备的示意性框图。
图10是泵设备的示意性框图。
图11是泵设备的示意性框图。
图12A是现有技术的泵设备的示意性框图。
图12B是现有技术的电动机的端视图。
具体实施方式
本公开内容涉及一种泵设备,该泵设备具有围绕公共轴线旋转的电动机和沿着公共轴线往复运动的泵送构件。电动机和泵送构件在公共轴线上同轴。电动机包括绕公共轴线旋转的转子和被通电以产生使转子旋转的磁通的定子。定子包括一个或更多个线圈,每个线圈均与公共轴线同轴。
图1A是泵系统10的正视示意性框图。图1B是泵系统10的侧视示意性框图。将一起论述图1A和图1B。在本实施例中,泵系统10被设置为例如用于喷涂油漆或其他液体的喷射(spray)系统,然而,泵系统10可以被设置为用于其他泵送和流体处理应用,例如位置转移、装载(loading)和卸载、喷雾、计量、涂覆等。泵设备12、支撑件14、喷枪16、供应管线18和储存器20被示出。泵设备12包括泵框架22、电动机24、驱动器26、容积泵(displacement pump)28和控制器29。支撑件14包括支撑框架30和轮子32。容积泵28的流体位移构件34和泵体36被示出。喷枪16包括手柄38和触发器40。
本实施例中的泵系统10是用于将各种流体的喷射物施加到基底上的系统,流体的示例包括涂料、水、油、污渍、终饰材料、骨料(aggregate)、覆盖材料和溶剂以及其他选择。泵设备12可以产生高流体泵送压力,例如约3.4-69兆帕(MPa)(约500-10,000磅/平方英寸(psi))或甚至更低和/或更高。在一些示例中,泵送压力在约20.7-34.5MPa(约2,000-4,000psi)的范围内。高流体泵送压力对于将流体雾化成喷射物以将流体施加到表面是有用的。虽然关于泵系统10的喷射系统版本描述了泵设备12,但是应当理解,泵设备12可以用于在任何期望的系统中进行泵送。例如,泵设备12可以用作输送泵来输送流体;可以用于多组分喷射系统中,例如将组分流体供给到配比泵;用于比例泵中;装载和卸载;计量;涂覆等。
泵设备12被配置为从储存器20抽取喷射流体并将流体泵送到下游的喷枪16以施用于基底上。支撑件14连接到泵设备12并且相对于储存器20支撑泵设备12。支撑框架30连接到泵框架22。轮子32连接到支撑框架30以促进工作地点之间和工作地点内的移动。虽然泵设备12被描述为由支撑件14支撑,但是应当理解,泵设备12可以安装成以任何期望的方式抽取流体。例如,泵设备12可以安装在储存器20的盖子上,使得储存器20支撑泵设备12。泵设备12可以直接安装到储存器20。例如,储存器可以是鼓形件(drum),例如55加仑的鼓形件以及其他选项,并且泵设备12可以直接安装到鼓形件上。在这样的示例中,泵设备12可以被称为鼓形件泵(drum pump)。
泵框架22支撑泵设备12的其他部件。电动机24和容积泵28连接到泵框架22。电动机24是具有定子和转子的电动机。转子被配置为响应于通过定子的电流而围绕旋转轴线旋转。旋转轴线与图示的公共轴线CA同轴。电动机24产生与公共轴线CA同轴的旋转输出。
除非另有说明,否则本文使用的术语“径向的”或“径向地/在径向上”意指正交于公共轴线CA。除非另有说明,否则本文使用的术语“轴向的”或“轴向地/在轴向上”意指平行于公共轴线CA。除非另有说明,否则本文使用的术语“周向的”或“周向地/在周向上”是指围绕公共轴线CA。
控制器29可操作地连接到电动机24,电气地和/或通信地,以控制电动机24的操作。控制器29由此控制容积泵28的泵送。控制器29可以具有用于控制容积泵28的泵送的任何期望的配置并且可以包括控制电路和存储器。控制器29被配置为存储可执行代码、实现功能和/或处理指令。控制器29被被配置为执行本文论述的任何功能,包括接收来自本文提及的任何传感器的输出、检测本文提及的任何条件或事件、以及控制本文提及的任何部件的操作。控制器29可以具有用于控制泵设备12的操作、收集数据、处理数据等的任何合适的配置。控制器29可以包括硬件、固件和/或存储的软件。控制器29可以是适合根据本文描述的技术操作的任何类型。虽然控制器29被示为单个单元,但是可以理解控制器29可以完全或部分地设置在一个或更多个电路板上。在一些示例中,控制器29可以实现为多个分立的电路子组件。
驱动器26连接到电动机24以由电动机24驱动。驱动器26接收来自电动机24的旋转输出并将来自电动机24的旋转输出转换成沿着公共轴线CA的线性输入。驱动器26(直接或间接地)连接到流体移位构件34以驱动流体移位构件34沿着公共轴线CA往复运动。在一些示例中,电动机24、驱动器26和流体移位构件34同轴地设置在公共轴线CA上。这样,电动机24的旋转轴线和流体移位构件34的往复运动轴线是同轴的。流体移位构件34在泵体36内往复运动以将喷射流体从储存器20通过供应管线18泵送到喷枪16。流体移位构件34可以是圆柱形的、沿着公共轴线CA呈长形并且与公共轴线CA同轴。在一些示例中,流体移位构件34可以是活塞,其可以沿着公共轴线CA呈长形并且与公共轴线CA同轴。在一些示例中,流体移位构件34可以是隔膜,在该隔膜中,其中心线性地往复运动,而隔膜的圆形外周边保持在位。隔膜可以与公共轴线CA同轴,使得隔膜的中心在公共轴线CA上并沿着公共轴线CA线性地往复运动。
在操作期间,用户可以通过移动支撑件14将泵设备12操纵到相对于目标基底的期望位置,或其他泵送应用。例如,用户可以通过将轮子32上的支撑框架30倾斜并将泵设备12滚动到期望的位置来操纵泵设备12。泵设备12可以是手持式的,这意味着人们可以用手将泵设备12移动到工作现场上和周围。在一些实施例中,泵设备12足够轻以使其可以被拾起(例如,小于约31.8千克(kg)(小于约70磅(lbs)))并被携带。在一些情况下,泵设备12是带轮子的以允许运输,如上所述。在一些情况下,泵设备12的重量可以小于约45.4kg(约100lbs),或者在一些情况下可以小于约68.0kg(约150lbs),或者在一些情况下可以小于约90.7kg(约200lbs)。
容积泵28可以延伸到储存器20中。电动机24向驱动器26提供旋转输入,并且驱动器26向流体位移构件34提供线性输入以引起流体位移构件34的往复运动。电动机24的转子在公共轴线CA上旋转以产生旋转输出。来自电动机24的旋转输出作为旋转输入提供给驱动器26,驱动器26将来自电动机24的旋转输入转换为线性输出,该线性输出作为线性输入提供给流体移位构件34。流体移位构件34的线性输入来自驱动器26引起流体位移构件34在公共轴线CA上的线性位移。流体移位构件34从储存器20抽取流体,对流体加压,并将流体通过供应管线18向下游驱动到喷枪16。用户可以通过例如用用户的单手抓住手柄38来操纵喷枪16。用户通过致动触发器40来引起喷射。在一些示例中,由泵设备12产生的压力雾化离开喷枪16的流体以产生流体喷雾。在一些示例中,喷枪16是无气喷雾器,这意味着单独作用在流体上并且由泵设备12产生的压力推动和雾化流体,而气流不用于推动和雾化流体成喷雾。
图2是泵设备12的示意性框图。泵设备12包括马达24、驱动器26和容积泵28。其示出了电动机24的转子42和定子44。转子42包括永磁体阵列46和转子体48。定子44包括相组件50,每个相组件均包括线圈52。驱动器26包括驱动螺母54和螺杆56。容积泵28包括泵体36、流体位移构件34和止回阀58a、58b。
马达24是电动机。转子42被配置为相对于定子44并且在旋转轴线AR上旋转。定子44与转子42同轴地设置在旋转轴线AR上。旋转轴线AR与公共轴线CA同轴。转子42包括朝向定子44定向的永磁体阵列46。在所示示例中,转子42设置在定子44周围并且永磁体阵列46设置在转子体48的径向内侧上。气隙60形成在定子44和转子42之间,使得定子44和转子42不直接接触。更具体地,气隙在定子44和永磁体阵列46之间径向地形成。因此,可以认为电动机24包括外转子。然而,应当理解,在各种其他示例中,转子42设置在定子44内以在定子44内旋转,使得可以认为电动机24包括内转子。在这样的示例中,永磁体阵列46可以设置在转子体48的外径向表面上。
定子44包括沿着并围绕旋转轴线AR排列的相组件50。每个相组件50均包括绕公共轴线CA周向地延伸的线圈52。相组件50包括形成在该相组件50的线圈52的每个轴向侧上的金属部件。金属部件可以全部或部分地由叠层的叠堆形成。叠层可以由这样的材料形成,所述材料能够非常易于因由线圈52产生的场而极化。这种材料通常是铁磁性的。铁磁材料可以是金属,例如铁或铁合金,例如钢。更具体地,叠层可以由硅钢以及其他选项制成。铁磁材料可以是掺杂或嵌设有铁磁元素的陶瓷。
线圈52形成为绕公共轴线CA周向地延伸的线箍。因此,线圈52与公共轴线CA同轴。每个线圈52相对于其他线圈52是离散的。每个线圈52均是绕公共轴线CA的导线(通常是铜)绕组。因此,每个线圈52均可以是围绕公共轴线CA的20、30、40、50、100或更少或更多圈的连续绕组。在一些实施例中,带(ribbon)被缠绕而不是线(wire)。每个线圈52均具有代表每个线圈52的电路端部的两条终端线,用于通过线圈52运行AC信号,该线圈52可以与控制器29(图1A和图1B)电连接。
线圈52在径向上不彼此重叠或交叉。任何一个线圈52的任何部分都没有沿着公共轴线CA设置在与任何其他线圈52相同的轴向位置处。因此,没有一个线圈52与任何其他线圈52在径向上重叠。马达24的每个线圈52之间存在轴向间隙。因此,线圈52位于沿着公共轴线CA的分开且不同的轴向位置处。每个线圈52均由圆形线圈制成。公共轴线CA延伸通过每个线圈52的每个圈(loop)。所述的线圈52中不包括公共轴线CA不延伸通过其中的圈。所述圈的导线不轴向地延伸,而是围绕公共轴线CA周向地延伸。
容积泵28设置在泵设备12的与马达24相反的轴向端部。流体移位构件34(例如活塞或隔膜以及其他选项)被配置为在往复运动轴线RA上往复运动。往复轴线RA与公共轴线CA同轴。往复轴线RA也与旋转轴线AR同轴。流体移位构件34在泵体36内往复运动以泵送流体。泵体36和流体移位构件34都可以与公共轴线CA同轴。在一些示例中,泵体36是缸体/圆柱体。例如,泵体36可以是缸体,流体移位构件34可以是沿着往复轴线Ra在轴向上呈长形的活塞,两者都与转子42和定子44同轴地设置在公共轴线CA上。
驱动器26在马达24和流体移位构件34之间延伸并连接。在所示的示例中,驱动器26包括螺杆56和驱动螺母54。长形的螺杆56与公共轴线CA同轴,因此与往复轴线RA和旋转轴AR同轴。依赖于泵设备12的机械设计,长形的螺杆56可以在公共轴线CA上旋转而不做直线往复运动,或者长形的螺杆56可以在不旋转的情况下沿着公共轴线CA直线往复运动之一。驱动螺母54是与公共轴线CA同轴的并且因此与往复轴线RA和旋转轴线AR同轴。驱动螺母54可以是如下两种情况下之一:在螺杆56直线地往复运动的实施例中,驱动螺母54可以在公共轴线CA上旋转;或者,在螺杆56在公共轴线CA上旋转但不线性地往复运动的实施例中,驱动螺母54可以沿着公共轴线CA往复运动。
驱动器26的旋转部件(例如,驱动螺母54和螺杆56中的第一个)连接到转子42以接收来自马达24的旋转输出。驱动器26的往复运动部件(例如,驱动螺母54和螺杆56中的另一个)连接到流体移位构件34以向流体移位构件34提供直线输入以驱动流体移位构件34的轴向往复运动。
虽然驱动器26的至少一部分轴向地设置在马达24和容积泵28之间,但是应当理解,驱动器26的一个或更多个部件可以与马达24的一个或更多个部件在径向上重叠。当这些部件沿着公共轴线CA布置在共同的轴向位置时,所述部件可以被认为是在径向上重叠的。从公共轴线CA延伸的径向线将延伸通过每个径向重叠部件。例如,驱动螺母54可以在转子42的径向内侧(特别是在转子42位于定子44内并且在定子44内旋转的实施例中)以线性地驱动螺杆56。在一些示例中,螺杆56至少部分地设置在马达24的中空芯体内(中空芯体延伸穿过转子42并且与转子42和公共轴线CA同轴)。在一些示例中,马达24和驱动器26的直线移位元件之间的重叠量可以在操作期间变化。例如,螺杆56的轴向端部可以设置在马达24内并且沿着公共轴线CA相对于马达24轴向移动,使得重叠量增加和减少。因此,往复运动部件的往复运动区域的至少一部分(即,往复运动部件的线性行进范围的远端之间的沿着公共轴线的区域)可以与旋转轴线的转子区域(即,转子42沿着旋转轴线所在的区域)的至少一部分既同轴又位于同一位置。
在操作期间,向线圈52提供电力并且相组件50产生与永磁体阵列46相互作用以驱动转子42旋转的电磁场。所示的马达24的实施例包括三个相,这些相对应于三个相组件50和其中的线圈52,其中,三个正弦AC信号(被以120度电气偏移)通过线圈52传递。如果有两个相组件50和两个线圈52,则两个正弦AC信号将相隔180度,或者对于四个相组件50的组相隔90度等。
转子42绕公共轴线CA旋转并产生旋转输出。旋转输出被提供给驱动器26,驱动器26将旋转运动转换成沿着公共轴线CA的线性运动。由驱动器26产生的线性输出被提供给流体移位构件34以使流体移位构件34在公共轴线CA上线性移位。在一些示例中,马达24是可逆马达,使得转子42在第一旋转方向(例如,顺时针和逆时针方向中的一个)上被驱动以在第一轴向方向AD1上移动流体移位构件34并且转子42在第二旋转方向上被驱动方向(例如,顺时针和逆时针方向中的另一个)以在第二轴向方向AD2上移动流体移位构件34。
在所示的示例中,容积泵28是双容积泵,其被配置为在流体移位构件34被沿第一轴向方向AD1驱动时和流体移位构件34被沿第二轴向方向AD2驱动时都输出流体。在所示的示例中,流体移位构件34是活塞并且止回阀58b安装到活塞以随活塞轴向地行进。随着流体移位构件34沿第二轴向方向AD2移动,止回阀58a打开并且止回阀58b关闭。流体通过止回阀58a被吸入泵体36的上游腔室中,该腔室轴向地设置在止回阀58a和止回阀58b之间。位于止回阀58b的与上游腔室相反的轴向侧的下游腔室中的流体从容积泵28向下游驱动。随着流体移位构件34沿第一轴向方向AD1移动,止回阀58a关闭而止回阀58b打开。关闭的止回阀58a防止流出上游腔室的逆流。流体从上游腔室被驱动,通过止回阀58b,并且进入下游腔室。流体也被从容积泵28向下游驱出下游腔室。因此,容积泵28可以在流体移位构件34的每个行程期间输出流体。
传统的AC感应马达使用多个分立的线圈,这些线圈轴向延伸并形成围绕转子的旋转轴线周向地延伸的线圈阵列(参见图10A-图10B)。每个线圈代表一个作用在磁铁上的潜在的极(potential pole)。在传统的AC感应马达中,围绕旋转轴周向地排列的离散线圈彼此异相。所产生的潜在转矩与极数成正比。这种马达中的极数受限于围绕马达内的旋转轴线周向地安装离散线圈的能力。
绕公共轴线CA一直周向地延伸的线圈52允许比传统的AC感应马达更多的磁极,并且更多的磁极允许力的产生更均匀地分布在转子42的圆周上,以使偏心力最小化或消除力的非生产性部分。将转子42的旋转轴线AR与移位构件34的往复运动轴线RA共定位在公共轴线CA上进一步使偏心力最小化。高极数消除或减少对减速传动(reduction gearing)的需要,进一步减小偏心力以及减轻重量和摩擦,允许泵设备12的更紧凑的布置。即使在低抽速、极少或没有使传动减速的情况下,本马达24的设计仍有利于高扭矩(其产生高流体压力),从而再次降低成本、重量、摩擦和包装尺寸。使转子42、长形的螺杆56和移位构件34的旋转轴线均相对于彼此同轴(例如,沿着公共轴线CA)允许紧凑且高效的泵设计。
在马达24的旋转输出和到活塞泵28的线性往复输入之间没有机械放大装置(机械地降低速度以增加扭矩)。虽然马达24可以在低速时产生高扭矩(这与传统的AC感应马达不同),但是本马达24也可以在高速下产生高扭矩。因此,单个泵设备12可以在一个性能范围内实现许多性能点(例如,压力相对泵送的体积),否则这将需要几种不同型号的、具有有特定的传动减速比(gear reductions)常规马达驱动泵,每个传动减速比特定所述相同性能范围的子部分。泵设备12由此提供了宽范围的可能的操作条件,这些条件将需要多个传统泵(每个传统泵具有不同的驱动器)以实现相同的范围。
图3A是泵设备12的立体图。图3B是沿着图3A中的线B-B截取的泵设备12的立体剖视图。图3C是沿着图3A中的线B-B截取的正剖视图。将一起论述图3A-图3C。泵框架22、马达24、驱动器26、容积泵28、转子轴62、轴承组件64、传感器66、泵轴68和计时构件70被示出。泵框架22包括主体72、连接器74和框架端部76。主体72包括第一部分78、第二部分80、第三部分82、安装法兰84、柱部86和侧开口88。框架端部76包括径向突出部90。
马达24包括转子42、定子44、马达轴承92、轴(axle)94、第一马达端部96、第二马达端部98和电源连接器100。转子42包括转子主体48和永磁体阵列46。将在本文中进一步论述定子44和转子42的内部细节。轴94包括外端部102。
驱动器26包括驱动螺母54、螺杆56和滚动元件104(图2B)。驱动螺母54包括螺母安装突起部106、螺母肩部108和轴向延伸部110。螺杆56包括第一螺杆端部112、第二螺杆端部114、螺纹116和孔118。转子轴62包括第一轴端部120和第二轴端部122。
容积泵28包括流体移位构件34、泵体36和止回阀58a、58b。流体移位构件34包括连接器108。传感器66包括第一换能器部件126和第二换能器部件128。
马达24设置在泵设备12的第一轴向端部,并且容积泵38设置在泵设备12的第二轴向端部。泵框架22支撑泵设备12的其他部件。马达24轴向地设置在框架端部76和主体72之间。马达24是电动马达24。定子44包括线圈52(如图2和4A-图9所示),其也可称为定子绕组,转子42包括永磁体阵列46。定子44和转子42同轴地设置在公共轴线CA上。转子42被配置为响应于通过定子44的电流而围绕公共轴线CA旋转。马达24是可逆马达,因为定子44可以使转子42围绕公共轴线CA沿两个旋转方向交替旋转(例如,顺时针或逆时针),以使流体移位构件34沿着公共轴线CA(例如,沿轴向方向AD1和轴向方向AD2)交替地沿向前或向后方向线性行进。例如,转子42可以沿顺时针和逆时针方向中的一个旋转,以驱动流体移位构件34进行沿轴向方向AD1的下行行程并远离马达24,然后转子42可以沿顺时针和逆时针方向中的另一个旋转以将流体移位构件34通过沿第二轴向方向AD2的上行行程拉向马达24。
在所示的示例中,转子42围绕定子44设置,使得马达24包括外转子。在各种其他实施例中,转子42设置在定子44内,使得马达24包括内转子,这仍然符合本公开内容的原理。永磁体阵列46面向定子44并且通过气隙60与定子44隔开(最佳在图2中看到)。在所示的示例中,永磁体阵列46设置在转子主体48的内圆周面上,因为转子42是外转子。永磁体阵列46围绕公共轴线CA周向地排列。永磁体阵列46形成与转子42和定子44同轴地设置在公共轴线CA上的环形阵列。转子主体48可以由单个部件或由固定在一起的多个部件形成。
定子44固定到轴94。轴94沿着公共轴线CA延伸并与公共轴线CA同轴地设置。轴94的外端部102沿第二轴向方向AD2延伸超过定子44的轴向端部。轴94的外端部102沿第二轴向方向AD2延伸超过转子42的轴向端部。外端部102轴向突出超过第二马达端部98。轴94的外端部102是敞开的,从而通过第二马达端部98向马达24提供电力。在所示的示例中,电源连接器100可以是被配置为连接到插座(例如壁式插座)的电插头,其通过延伸穿过外端部102中的开口并且连接到定子44的线圈52的电缆而连接到定子44。因此,马达24可以通过第二马达端部98接收电力并通过第一马达端部96提供旋转输出。马达轴承92相对于定子44支撑转子42。马达轴承92有助于转子42相对于定子44的旋转。轴94延伸穿过设置在马达24的第二马达端部98处的马达轴承92,使得马达轴承92在第二马达端部98处设置在转子体48和轴94之间。
泵框架22支撑马达24。主体72相对于马达24沿轴向方向AD1延伸。在所示的示例中,主体72与第一马达端部96轴向地间隔开。主体72与第一马达端部96沿第一轴向方向AD1间隔开。主体72与公共轴线CA同轴地设置。这样,主体72与马达24和流体移位构件34在公共轴线CA上同轴地设置。主体72包括轴向地最靠近马达24的第一部分78、连接到第一部分78并且从第一部分78沿第一轴向方向AD1延伸的第二部分80、以及连接到第二部分并且从第二部分80沿第一轴向方向AD1延伸的第三部分82。虽然主体72被示出为由三个部分形成,但是应当理解,主体72可以根据需要由尽可能多或尽可能少的部分形成。在所示的示例中,形成主体72的与公共轴线CA正交的每个部分的宽度随着主体72远离马达24并朝向容积泵28延伸而减小。在所示的示例中,第一部分78的宽度大于第二部分80的宽度。第二部分80的宽度大于第三部分82的宽度,并且第三部分82的宽度大于泵体36的宽度。柱部86和侧开口88形成于第三部分82的与第二部分80相反的端部中。侧开口88形成在柱部86之间。侧开口88提供访问流体移位构件34和泵轴68之间的连接部的通道,以方便容积泵28的安装和拆卸。
由多个部分形成的主体72有利于泵设备12的有效组装和维修。主体72可以被拆卸以提供对泵设备12的各种部件的访问,包括动态的、移动的部件。例如,第二部分80可以从第一部分78移除以促进驱动器26的润滑。应当理解的是,在一些示例中,可以在不拆卸主体72的情况下访问和维修驱动器26。缓冲器130b设置在第三框架体62中、泵轴68的与驱动螺母54相反的一侧。缓冲器(bumper)130b可以是可压缩的,并且可以在超行程的情况下与泵轴68相接。
框架端部56设置在马达24的与主体72相反的轴向侧。框架端部76靠近第二马达端部98设置。框架端部76固定到轴94的外端部102。通过轴94和框架端部76的连接,马达24静态地连接到泵框架22。泵框架22将马达24固定在沿着公共轴线CA的轴向位置,并通过泵框架22和轴94的连接来防止定子44相对于公共轴线CA移动。
连接器74在主体72和框架端部76之间延伸,并且将主体72和框架端部76固定在一起以防止框架端部76和主体72之间的相对运动。在所示的示例中,连接器74固定到框架端部76的径向突出部90并且连接到主体72的安装法兰84。连接器74将主体72和框架端部76固定在一起,以防止这些部件之间的不希望的相对运动以及这些部件相对于公共轴线CA的不希望的运动。虽然泵框架22被描述为由多个部件形成,但是应当理解,泵框架22用作单个部件以支撑马达24和容积泵28并且对在泵送过程中经受的载荷作出反应,如下面更详细地论述的。泵框架22可以根据需要由尽可能多或尽可能少的单独部件形成。
连接器74与转子42被径向地间隔开并且在框架端部76和主体72之间轴向延伸。转子42在由连接器74、主体72和框架端部76限定的区域内旋转。虽然连接器74被示出为由多个在围绕转子42周向地间隔开的连接构件形成,但是应当理解,在一些示例中,连接器74可以完全包围转子42。例如,一个或更多个连接器74可以形成外壳,转子42在该外壳中旋转。在所示的示例中,连接构件74包括多个拉杆,这些拉杆在框架端部76和主体72之间延伸并且连接框架端部76和主体72。
转子42和转子轴62用作为驱动器26提供动力的马达24的旋转输出部件。转子轴62固定到转子42以与转子42一起旋转。转子轴62在转子42的旋转轴线上旋转并且因此在公共轴线CA上旋转。转子轴62延伸到主体72的内部,使得转子轴62的至少一部分与主体72的至少一部分径向地重叠。在一些示例中,转子轴62可以可移除地连接到转子42,例如通过紧固件。应当理解,在其他示例中,转子轴62可以与转子主体48一体地形成。转子轴62从转子42沿着公共轴线CA并且沿第一轴向方向AD1轴向地延伸。转子轴62沿着与公共轴线CA同轴的轴线是长形的。转子轴62与定子44、转子42、驱动器26和流体移位构件34同轴地设置。在所示的示例中,转子轴62包括打开的第一轴向端部102和闭合的第二轴向端部104。闭合的端部设置在转子轴62和转子42之间的界面处。缓冲器130a设置在转子轴62的闭合的端部处的转子轴62中。缓冲器130a可以是可压缩的并且可以在超行程的情况下与第二螺杆端部114接合以防止损坏螺杆56。
轴承组件64径向地设置在转子轴62和泵框架22之间。更具体地,轴承组件64径向地设置在转子轴62和主体72之间。轴承组件64轴向地设置在驱动螺母54和马达24之间。轴承组件64相对于泵框架22支撑马达24并且有利于转子轴62相对于泵框架22的旋转。由此,轴承组件64在马达24和泵框架22之间形成动态连接。轴承组件64被配置为支撑在泵送期间产生的旋转及轴向载荷。轴承组件64支撑轴向载荷以将马达24与容积泵28产生的轴向载荷隔离。轴承组件64可以被称为止推轴承。
轴承组件64可以具有适合于支撑在泵送过程中产生的轴向载荷的任何构造。在一些示例中,轴承组件64可以包括单个轴承元件,该单个轴承元件被配置为在第一轴向方向AD1和第二轴向方向AD2中的每一个上支撑轴向载荷,例如双列角接触轴承等。在一些示例中,轴承组件64可以由多个轴承元件形成以支撑第一轴向方向AD1和第二轴向方向AD2中的每一个上的轴向载荷。例如,轴承组件64可以由被配置为支撑第一轴向方向AD1上的轴向载荷的第一圆锥滚子轴承和被配置为支撑第二轴向方向AD2上的轴向载荷的第二圆锥滚子轴承形成。
驱动器26与公共轴线CA同轴并且可操作地连接到转子轴62。驱动器26设置在转子轴62的与转子42相反的轴向端部处。驱动器26通过转子轴62接收来自转子42的旋转输出。驱动器26通过轴承组件64由泵框架22支撑。驱动器26轴向直接位于马达24和容积泵28之间。
驱动器26的驱动螺母54连接到转子轴62以由转子轴62驱动以在公共轴线CA上旋转。驱动螺母54可以通过紧固件(例如螺栓)、粘合剂或压配合以及其他选项附接到转子轴62。在所示的示例中,螺母安装突起部106便于将驱动螺母54安装到转子轴62上。紧固件可以通过螺母安装突起部106延伸到转子轴62中。第一轴向端部120与形成在驱动螺母54上的螺母肩部108接合。螺母肩部108形成在螺母安装突起部106和轴向延伸部110之间,轴向延伸部110延伸到转子轴62中并与转子轴62径向地重叠。螺杆56径向设置在驱动螺母54内。螺杆56和驱动螺母54设置成与公共轴线CA同轴。
滚动元件104设置在螺杆56和驱动螺母54之间并且相对于驱动螺母54支撑螺杆56。滚动元件104围绕并且沿着与公共轴线CA同轴的轴线排列。滚动元件104周向地限定接收区域,螺杆56的一部分在整个操作过程中设置在该接收区域内。螺杆56轴向延伸出接收区域的两端。接收区域可以是圆柱形的并且与公共轴线CA以及流体移位构件34的往复运动轴线和转子42的旋转轴线同轴。滚动元件104支撑驱动螺母54内的螺杆56,使得径向间隙132是间隙132形成在螺杆56和驱动螺母54之间并且由在螺杆56和驱动螺母54之间滚动的滚动元件104保持。保持间隙132防止螺杆56和驱动螺母54彼此直接接触。滚动元件104接合螺杆56的螺纹116以在螺杆56上施加轴向驱动力,从而使螺杆56沿着公共轴线CA轴向平移。滚动元件104可以具有任何合适的构造,用于相对于螺杆56支撑驱动螺母54并且由于驱动螺母54的旋转而线性地驱动螺杆56。例如,滚动元件104可以是滚珠或轴向长形的滚子。球可以接合螺母54和螺纹116的螺纹。轴向长形的滚子可以包括螺纹轴,该螺纹轴接合螺纹116以驱动螺杆56。滚动元件104围绕公共轴线CA周向地排列。
在所示的示例中,螺杆56被配置为在操作期间沿着公共轴线CA往复运动。驱动螺母54的旋转导致滚动元件104在螺杆56上施加轴向驱动力以沿着公共轴线CA线性地驱动螺杆56。螺杆56将来自驱动器26的线性输出提供给容积泵28。虽然螺杆56被描述为沿着公共轴线CA往复运动,但是应当理解,在一些示例中,螺杆56被配置为在公共轴线CA上旋转以驱动线性流体移位构件34的位移。例如,螺母可以连接到螺杆56以由于螺杆56的旋转而沿着螺杆56线性位移。在这样的示例中,螺杆56可以直接连接到转子轴或形成为转子轴的一部分62。此外,虽然螺杆56在本实施例中被示出为在马达24的外部,但是在一些实施例中螺杆56可以平移到马达24中。例如,驱动螺母54和滚动元件104可以在转子42的径向内部(特别是在转子42驻留在定子44内并且在定子44内旋转的实施例中)以驱动螺杆56延伸穿过马达24的中空芯体(中空芯体延伸穿过转子42并与转子42和公共轴线CA同轴)。在另一个实施例中,虽然驱动螺母54和滚动元件104不被转子42径向地重叠,但是螺杆56延伸到马达24的中空芯体中(例如,螺杆的端部倒回到、并且平移穿过、并且处于马达24的中空芯体内)。因此,在一些示例中,驱动器26的线性移位元件(例如,螺杆56)在泵循环的至少一部分期间与马达24径向地重叠,而驱动器的旋转部件(例如,螺母54)不径向地与马达24重叠。在每种情况下,中空芯体和螺杆56均与公共轴线CA同轴。
泵轴68连接到螺杆56和流体移位构件34。泵轴68在公共轴线CA上与马达24和流体移位构件34同轴地设置。泵轴68在公共轴线CA上与螺杆56、驱动器54和转子轴62同轴地设置。泵轴68连接到螺杆56以沿着公共轴线CA往复运动。在所示的示例中,泵轴68与螺杆56往复运动。应当理解,在螺杆56旋转而不是往复运动的示例中,泵轴68可以连接到螺杆56以沿着螺杆56往复运动。
泵轴68连接到流体移位构件34以驱动流体移位构件34的往复运动。因此,螺杆56和泵轴68可以被认为形成驱动器26的线性移位元件。泵轴68延伸到螺杆56内的孔118中。泵轴68可以以任何期望的方式连接到螺杆56,例如通过接口螺纹、销、压配合、粘合剂或弹簧锁以及其他选项。虽然泵轴68和螺杆56被描述为单独地形成的,但是应当理解,螺杆56和泵轴68可以形成为单个部件。在一些示例中,流体移位构件34可以直接连接到螺杆56并且计时构件70也可以安装到螺杆56。
计时构件70设置在泵轴68上并由泵轴68支撑。泵轴68和计时构件70可以被认为形成计时组件以防止驱动器26的线性移位元件围绕公共轴线CA旋转。在所示的示例中,计时组件防止螺杆56旋转以导致螺杆56改为线性位移。泵轴68形成计时组件的支撑,因为泵轴68支撑计时构件70。计时构件70与螺杆56和泵轴68一起往复运动。计时构件70被计时并与主体72接合,从而防止计时组件绕公共轴线CA旋转。例如,形成在计时构件70和主体72中的一个上的突起部可以与形成在计时构件70和主体72中的另一个上的凹槽接合。由此,计时构件70防止螺杆56围绕公共轴线CA旋转,从而便于螺杆56沿着公共轴线CA的平移。在一些示例中,计时构件70的外表面与主体72紧密配合以在计时构件70和主体72之间的界面处提供滑动密封。滑动密封界面防止灰尘和其他污染物迁移通过主体72在螺杆56围绕公共轴线CA旋转的示例中,计时构件70可以与螺母相关联,该螺母被配置为沿着螺杆56平移以防止螺母围绕公共轴线CA旋转。
传感器66被配置为感测沿第一轴向方向AD1的泵行程的结束和/或泵设备12的移动元件的线性和/或旋转位置。第一换能器部件126可以安装在泵框架22的孔中,并且第二换能器部件128可以安装在泵轴68的孔中,以及其他选项。传感器66可以基于线性和/或旋转移位元件的位置生成数据并将数据提供给马达24的控制器29。在所示的示例中,传感器66被配置为生成指示线性移位元件何时处于下行行程端部的日期,该下行行程可以与原始位置相关联。在一些示例中,马达24在通电时归位。例如,转子42可以在与下行行程相关的第一旋转方向上被驱动,直到第一换能器部件126感测到第二换能器部件128,指示下行行程的结束。然后,可以控制转子42以旋转与行程相关联的设定转数以引起随后的上行行程和下行行程。在一些示例中,马达24在操作期间重新归位以防止蠕变,例如在预定数量的泵循环或泵行程之后。在一些示例中,传感器可以集成到马达24中以感测转子42的角位置,用于控制和信号定时目的。例如,与马达24相关联的第二传感器可以生成关于转子42的旋转的数据并将该数据提供给控制器29。第一换能器部件126和第二换能器部件128可以具有任何期望的配置。例如,第一换能器部件126和第二换能器部件128中的一个可以是磁体,而第一换能器部件126和第二换能器部件128中的另一个可以是对由磁体产生的磁场敏感的磁簧开关。磁体部件可以安装到泵框架22和泵轴68中的任一个上,并且磁场传感器可以安装到另一个部件上。
容积泵28安装在泵框架22上并设置在公共轴线CA上。更具体地,泵体36安装在泵框架22的与马达24相反的一端。泵体36固定地安装在泵框架22上。泵体36固定在泵框架22上,使得泵体36在运行期间保持静止,并且不相对于公共轴线CA移动。泵体36可以围绕与公共轴线CA同轴的轴线呈圆柱形。由此,泵体36可以沿着与转子42的旋转轴线同轴的轴线伸长。
流体移位构件34至少部分地设置在泵体36内。在所示的示例中,流体移位构件34沿着与公共轴线CA同轴的轴线伸长。在所示的示例中,流体移位构件34是被配置为通过沿着公共轴线CA往复运动来泵送流体的活塞。然而,应当理解,流体移位构件34可以具有适合于泵送同时与公共轴线CA同轴地设置的任何期望的构造。例如,流体移位构件34可以是具有中心的隔膜,该隔膜设置在并且被配置为沿着公共轴线CA往复运动。虽然在该示例中流体移位构件34被描述为沿着公共轴线CA往复运动,但是应当理解,流体移位构件34的一些示例可以在公共轴线CA上旋转而不进行往复运动。
流体移位构件34在第一端部134和第二端部136之间轴向伸长。流体移位构件34的第一端部134连接到泵设备12的线性位移驱动元件。在所示的示例中,流体移位构件34的第一端部134是直接连接到泵轴68的与螺杆56相反的轴向端部。在所示的示例中,流体移位构件34的第一端部134延伸到泵轴68中。第一端部134固定到泵轴68上,使得流体移位构件34与螺杆56和泵轴68沿着公共轴线CA往复运动。第一端部134和泵轴68可以以任何期望的方式连接。例如,销可以延伸穿过第一轴向端部134并穿过泵轴68,以将流体移位构件34固定到泵轴68。虽然流体移位构件34被描述为直接连接到泵轴68,但是应当理解,流体移位构件34可以直接连接到驱动器26的其他线性移位元件。在一些示例中,流体移位元件34可以直接连接到螺杆56。
容积泵28通过泵体36和主体72之间的连接静态地连接到泵框架22。静态连接将泵体36保持在沿着公共轴线CA的设定位置。静态连接防止泵体36相对于公共轴线CA移动。例如,静态连接防止沿着公共轴线CA的线性运动或绕公共轴线CA的旋转运动。容积泵28通过流体移位构件34和驱动器26之间的连接动态地连接到马达24。动态连接使流体移位构件34相对于公共轴线CA移动。例如,动态连接引起沿着公共轴线CA的线性运动或绕公共轴线CA的旋转运动,这取决于容积泵28的配置。
止回阀58a是由泵体36支撑的单向阀。止回阀58b是设置在流体移位构件34中以便与流体移位构件34一起往复运动的单向阀。在所示的示例中,止回阀58b设置在流体移位构件34的第二轴向端部136处。第二容积泵28可以是双容积泵,因为容积泵28在第二轴向方向AD2上的上行行程和在第一轴向方向AD1上的下行行程期间都输出流体。止回阀58a可以与公共轴线CA同轴。更具体地,止回阀58a的球和环形座都可以与公共轴线CA同轴。止回阀58b可以与公共轴线CA同轴。更具体地,止回阀58b的球和环形座都可以与公共轴线CA同轴。
动态密封件124a、124b设置在流体移位构件34和泵体36之间的界面处。动态密封件124a将泵体36的内部分成上游腔室和下游腔室。动态密封件124a可以安装到流体移位构件34以与流体移位构件34一起移动,或者可以相对于泵体36静止,使得流体移位构件34相对于动态密封件124a移动。在所示的示例中,流体移位构件34通过动态密封件124b从泵体36离开。动态密封件124b由泵体36支撑并且相对于泵体36保持静止,使得流体移位构件34相对于动态密封件124b移动。动态密封件124a、124b可以由成堆的密封环形成。动态密封件124a、124b同轴地设置在公共轴线CA上,因此与转子42的旋转轴线和流体移位构件34的往复运动轴线同轴。
以示例的方式论述了包括下行行程和上行行程的示例性泵循环。在操作期间,向定子44提供电力以驱动转子42围绕公共轴线CA旋转。转子42在第一旋转方向(例如,顺时针和逆时针方向中的一个)上围绕公共轴线CA旋转并且由于转子42和转子轴62之间的连接而导致转子轴62同时旋转。由于转子轴62和驱动螺母54之间的连接,转子轴62在公共轴线CA上旋转并且为驱动器26提供动力。
驱动螺母54在公共轴线CA上旋转,导致滚动元件104在第二轴向方向AD2上对螺杆56施加轴向驱动力,从而沿着公共轴线CA线性地驱动螺杆56。螺杆56沿第二轴向方向AD2并朝向马达24被线性驱动。在一些示例中,螺杆56的一部分延伸到马达24的一部分中并与马达24的一部分轴向地重叠。在这样的示例中,随着螺杆56沿第二轴向方向AD2位移,轴向重叠量增加。螺杆56沿着公共轴线CA和第二轴向方向AD2通过上行行程拉动流体移位构件34。在上行行程期间,止回阀58a打开而止回阀58b关闭。形成在流体移位构件34和止回阀58a之间的上游腔室的容积增大,并且位于流体移位构件34和动态密封件124a之间的动态界面的与上游腔室相反的轴向侧的下游腔室的容积减小。流体通过止回阀58a被吸入上游腔室,同时从容积泵28的下游腔室向下游驱动。
在完成上行行程之后,转子42在与第一旋转方向相反的第二旋转方向(例如,顺时针和逆时针方向中的另一个)上被驱动。转子42驱动转子轴62的旋转,转子轴62驱动驱动螺母54的旋转。滚动元件104沿第一轴向方向AD1在螺杆56上施加轴向驱动力,以沿着公共轴线CA线性驱动螺杆56。螺杆56驱动泵轴68并且因此驱动流体移位构件34通过沿着公共轴线CA和第一轴向方向AD1的下行行程。在下行行程期间,止回阀58a关闭而止回阀58b打开。流体从上游腔室通过止回阀58b被驱动到下游腔室。流体从容积泵28向下游驱动。传感器66可以感测下行行程的结束并将该数据提供给控制器29。在所示的示例中,容积泵28在上行程和下行行程期间都输出流体。
在泵送过程中会产生和经历轴向力。轴承组件64允许来自马达24的旋转运动在驱动器26内传递,同时防止由容积泵28产生的一些或全部轴向力传递到转子42。流体移位构件34沿着公共轴线CA以往复线性方式移动并经受往复运动过程中由于流体阻力而产生的轴向力。具体地,流体移位构件34在移动通过上行行程时经历向下的反作用力并且在移动通过下行行程时经历向上的反作用力。向上的反作用力和向下的反作用力都通过驱动器26传递到轴承组件64。马达24、流体移位构件34和轴承组件64的同轴特性有利于有效的力传递以保护马达24免受反作用力的影响。轴承组件64与流体移位构件34的往复运动轴线同轴地设置,使得提供给轴承组件64的力围绕公共轴线CA平衡。轴承组件64将这种力传递到泵框架22以隔离马达24。同轴特性有利于紧凑、有效的轴承布置。
在使用长形滚子的示例中,螺杆56、驱动螺母54和可能的滚动元件104上的螺距确定转子42旋转与流体移位构件34线性行程的比率。转子42和驱动器26的尺寸设计成提供期望的转数与行程之比率。在一些示例中,转子42和驱动器26的尺寸设置成使得转子42的一转导致流体移位构件34在第一轴向方向AD1和第二轴向方向AD2之一上的全行程。沿相反旋转方向的完整旋转导致流体移位构件34沿相反轴向方向的完整行程。因此,在相反方向上的两个旋转可以提供流体移位构件34的完整泵循环,每个泵循环包括在每个轴向方向上的一个行程(例如,上行行程和下行行程)。由此,泵设备12可以提供转子42的转数和泵行程之间的1∶1比率。
然而,可以理解的是,转子42和驱动器26的尺寸可以设计成提供任何期望的转数与行程之比率。泵设备12可以被配置为提供任何期望的转数与行程之比率。在一些示例中,泵设备12提供高达约4∶1的转数与行程之比率。应当理解,其他最大的转数与行程之比率是可能的,例如约1∶1、2∶1、3∶1或5∶1,以及其他选项。在一些示例中,泵设备12可以提供约0.25∶1-7∶1之间的转数行程比。应当理解,所论述的任何范围可以是包含端值的范围,使得边界值被包括在该范围内。还应当理解,所论述的范围中的每一个都可以与指定的范围不同,同时仍落入本公开内容的范围内。
还应当理解,控制器29可以控制马达24的操作,使得实际行程长度是动态的并且可以在操作期间变化。控制器29可以使行程长度在下行行程和上行行程之间变化。在一些示例中,控制器29被配置为在最大行程长度和最小行程长度之间控制马达24的操作。
马达24和驱动器26可以被配置为使流体移位构件34每转子42旋转至少约6.35mm(约0.25英寸)。转子42每转8.9-30.5mm(约0.35-1.2英寸)。在一些示例中,马达24和驱动器26被配置为使流体移位构件34在约8.9-11.4mm(约0.35-0.45英寸)之间移动。在一些示例中,马达24和驱动器26被配置为在约19-21.6mm(约0.75-0.85英寸)之间移动流体移位构件34。在一些示例中,马达24和驱动器26被配置为使流体移位构件34在约24.1-26.7mm(约0.95-1.05英寸)之间移动。由泵设备12提供的转子42每转的轴向位移有助于泵送期间的精确控制和快速响应。转子42每转的轴向位移有利于泵行程之间的快速转换,使流体移位构件34不移动时的时间最少化,并提供更有效的泵送,同时减少泵设备12的部件的磨损。
泵设备12被配置为根据转数与位移之比率进行泵送。更具体地,马达24和驱动器26被配置为对于转子42的每一转提供转子42的转数和流体移位构件34的线性行进距离之间的期望的转数与位移之比率,如以英寸为单位测量的。在一些示例中,转数与位移之比率(转/英寸)小于约4∶1。在一些示例中,转数与位移之比率在约0.85∶1和3.25∶1之间。在一些示例中,转数与位移之比率在约1∶1-3∶1之间。在一些示例中,转数与位移之比率在约1∶1-2.75∶1之间。在一些示例中,转数与位移之比率约为1∶1-2.55∶1。在一些示例中,转数与位移之比率在约1∶1-1.3∶1之间。在一些示例中,转数与位移之比率在约0.9∶1-1.1∶1之间。在一些示例中,转数与位移之比率在约2.4∶1-2.6∶1之间。相对于其他电动泵,例如需要减速齿轮以产生足够的泵送扭矩并且通常具有约8∶1或更高的转数与位移之比率的曲柄驱动泵,泵设备12提供的较低的转数与位移之比率有利于更高效的泵送,产生更少的磨损,并且为改变行程方向提供快速响应。转子42能够以较低的转速被驱动以产生相同的线速度,从而在运行期间产生较少的热量。
泵设备12提供了显著的优点。马达24和流体移位构件34同轴地设置在公共轴线CA上,有利于紧凑、重量轻的泵送布置。与包括齿轮减速装置的泵布置相比,同轴的马达24和流体移位构件34允许快速响应和控制。马达24可以在低速下产生高扭矩并且不需要减速齿轮来驱动流体移位构件34的位移。马达24直接向驱动器26提供旋转动力并且驱动器26直接向流体移位元件34提供线性动力。旋转和往复运动在公共轴线CA上同轴地设置的部件有利于有效的力传递,甚至在公共轴线CA上加载,防止磨损并增加泵设备12的使用寿命。
泵设备12的每个旋转部件(例如,转子42、转子轴62和驱动螺母54)连接在一起以便以共同的旋转速度一起旋转。泵设备12的每个轴向位移部件(例如,螺杆56、泵轴68和流体移位构件34)连接在一起以便以共同的轴向速度线性地移位。这种常见的速度有助于快速反应和翻转,因为旋转输出不必通过减速齿轮系加速或以其他方式改变。由此,泵设备12提供了一种紧凑的、重量轻的组件,适用于在高压下泵送流体。
图4A是将马达24的部件独自立体地示出的立体图。图4B是定子44的立体图。将一起论述图4A和图4B。马达24包括被转子42包围的定子44。转子42的永磁体阵列46被示出。永磁体阵列46包括磁体138和集中器(concentrators)140。定子44包括相组件50a-50c(在本文中统称为“相组件50”或“多个相组件50”)。相组件50a包括一对磁通环142a、142b;轴向返回部144;以及线圈52。相组件50b包括一对磁通环142c、142d;轴向返回部144;以及线圈52。相组件50c包括一对磁通环142e、142f;轴向返回部144;以及线圈52。每个磁通环142a-142f(在本文中统称为“磁通环142”或“多个磁通环142”)分别包括圆形突刺阵列146a-146f(在本文中统称为“圆形突刺阵列146”或“多个圆形突刺阵列146”)。每个磁通环142a-142f包括叠层件148、枝部150、主干152、箍(hoop)154和多个突刺156。
马达24沿着公共轴线CA定位。更具体地,马达24具有与公共轴线CA同轴的圆柱形轮廓。定子44和转子42中的每一个还具有与公共轴线CA同轴的圆柱形轮廓。转子42由定子44驱动以绕公共轴线CA同轴旋转。虽然在本实施例中,转子42围绕定子44使得转子42在公共轴线CA上围绕定子44周向旋转,但是在替代实施例中,转子42可以替代地位于定子44内部。无论转子42是在定子44周围还是在定子44内,马达24的操作原理以及转子42和定子44的结构都可以是相似的。所以,虽然下面的讨论参照的是转子42围绕定子44旋转的实施例,这些教导同样适用于转子42在定子44内旋转的实施例。
在所示的实施例中,转子42包括永磁体阵列46。永磁体阵列46包括多个永磁体138。多个磁体138围绕公共轴线CA环形地排列。更具体地,多个磁体138的管状阵列与公共轴线CA同轴。多个磁体138围绕公共轴线CA周向地排列。多个磁体138围绕定子44周向地排列。
如图4A所示,每个磁体138均具有长轴,长轴LA轴向地定向(平行于公共轴线CA)。每个磁体138均具有短轴SA,如图4A所示,短轴SA与长轴LA正交并且与转子42相切。每个磁体138的短轴SA均可以与以公共轴线CA为中心的圆相切。每个磁体138均具有永磁极——北极和南极,它们是周向地定向的。更具体地,每个磁体138在短轴SA的一端具有北极并且在短轴SA的相反端具有南极。北极和南极中的每一个都延伸长轴LA的长度,使得北极和南极被沿着长轴LA的轴向界面分开。每个磁体138的北极和南极不是以磁体通常在它们的长轴LA的相反端被分成北极和南极的方式轴向地定向的。在所示的实施例中,虽然多个磁体138围绕定子44环形地排列,但是如前文所述,多个磁体138可以环形地排列在定子44内。定子44可以不包括任何永磁体,而是电磁体,该电磁体,如本文进一步描述的,由线圈52当通电时产生磁场。同样,转子42可以仅包括永磁体,而不包括任何电磁体。
转子42还包括多个集中器140。多个集中器140与多个磁体138交错。这样,没有一个磁体138物理接触另一个磁体138,并且没有一个磁体138物理上与另一个邻接。然而,磁体138由多个集中器140物理固定。多个集中器140轴向地定向,使得每个集中器140的长轴平行于公共轴线CA。每个集中器140的长轴平行于每个磁体138的长轴LA。每个集中器140可以由堆叠的叠层形成。每个叠层的长轴均与公共轴线CA平行。因此,叠层的堆叠的纹理(grain)是轴向地定向的。
每个磁体138均平行于公共轴线延伸。每个磁体138均可以横跨定子44的多个相并且与其磁性相互作用。例如,每个磁体138均可以与多个线圈52和突刺156的多个环形阵列径向地重叠。每个集中器140均平行于公共轴线延伸。每个集中器140均可以横跨定子44的多个相并与其磁性相互作用。例如,每个集中器140均可以与多个线圈52和突刺156的环形阵列径向地重叠。
叠层可以由在线圈产生的磁场作用下非常容易极化的材料制成。这种材料通常是铁磁性的。铁磁材料可以是金属如铁或铁合金如钢。更具体地,叠层可以由硅钢以及其他选项制成。铁磁材料可以是掺杂或嵌设有铁磁元素的陶瓷。
定子44包括多个突刺156。每个突刺156均朝向转子42突出。例如,每个突刺156均相对于公共轴线CA径向地(正交)朝向转子42突出。在本实施例中,每个突刺156是朝向转子42变窄以将集中的磁通量朝向转子42的有限部分集中的结构。更具体地,每个突刺156的圆周宽度随着突刺156相对于定子44并朝向转子42径向延伸而变窄。在一些实施例中,虽然突刺156可能不朝向转子42变窄,但是仍然可以将磁通量向转子42集中。在本实施例中,突刺156从公共轴线CA向外突出,因为转子42从定子44径向地向外定位。然而,在替代的内转子42的实施例中,突刺156朝向这种转子42并朝向公共轴线CA向内突出。多个突刺156排列成具有管状的轮廓。更具体地,多个突刺156围绕公共轴线CA环形地排列并且沿着公共轴线CA轴向排列。这样,定子44包括多个圆形突刺阵列146a-146f。图4B的实施例示出六个圆形突刺阵列146a-146f,这六个圆形突刺阵列146a-146f沿着公共轴线CA排列。所述多个圆形突刺阵列146a-146f沿着公共轴线CA排列。每个圆形突刺阵列146a-146f与公共轴线CA同轴。多个圆形突刺阵列146a-146f限定与公共轴线CA同轴的圆柱体。突刺156不必离开定子44的其他物理部件而突出到气隙中。相反,突刺156可以部分或完全嵌入诸如环氧树脂的灌封(potting)化合物中。例如,定子156可以具有圆柱形外部,其中,突刺156位于内部和/或暴露在圆柱形外表面上,但是突刺156仍然起到相对于周围灌封材料集中电磁通量的作用。
在本实施例中,圆形突刺阵列146a-146f分别是多个磁通环142a-146f的一部分。每个磁通环142支撑该磁通环142的相应圆形突刺阵列146的所有突刺156。例如,磁通环142a支撑圆形突刺阵列146a的所有突刺156。磁通环142各自至少部分地由叠层(laminate)形成。每个磁通环142a-146f可以是连续的叠层件或由围绕公共轴线CA排列的多个叠层件形成。在本实施例中,每个磁通环142a-146f包括箍154、相对于箍154径向延伸的多个主干152、以及由多个主干152支撑的多个枝部150。
对于每个磁通环142,箍154作为环而完全围绕公共轴线CA延伸。主干152从箍154径向延伸并朝向转子42。在所示的示例中,主干152径向延伸远离公共轴线CA,因为马达24是外转子。枝部150由主干152支撑。枝部150设置在主干152的与箍154相反的径向端。枝部150从主干152在围绕公共轴线CA的第一圆周方向(例如,顺时针和逆时针方向中的一个)上和围绕公共轴线CA的第二圆周方向(例如,顺时针和逆时针方向中的另一个)上周向地延伸。突刺156形成在枝部150的与主干152相反的径向侧上。
在一些其他实施例中,磁通环142不包括箍154和/或主干152,在这种情况下,枝部150由其他结构直接连接和/或支撑,例如通过环氧树脂或其他灌封化合物连接。在一些实施例中,多个叠层件组装在一起以形成每个圆形磁通环142和/或圆形突刺阵列146,例如通过组装在一起的多个弧形部分。
每个箍154均与公共轴线CA同轴。无论是由离散的叠层件组装而成,每个叠层件均支持圆形突刺阵列146的多个但不是所有的突刺156,还是由支撑圆形突刺阵列146的所有突刺156的连续叠层形成,圆形突刺阵列146a-146f都由磁通环142a-142f支撑,其允许磁通在周向相邻的突刺156之间流动。多个磁通环142a-142f沿着公共轴线CA并围绕公共轴线CA排列。每个磁通环142a-142f与公共轴线CA同轴。形成磁通环142a-142f的叠层148形成突刺156的至少一部分。本实施例中的突刺156,如在本文中进一步描述的,包括由叠层形成的突刺主体158和由粉末金属形成的粉末金属末端部160。然而,应当理解,在各种其他实施例中,叠层件148可以完全形成突刺156。
在本实施例中,每个突刺156均包括粉末金属末端部160,这在一些实施例中可能是理想的(由于粉末金属缺乏方向性纹理),但是各种实施例不限于此,并且每个突刺156可以不包括粉末金属部件。因此,每个突刺156均可以部分或全部由叠层形成,例如,由其所相关的磁通环142的叠层件148形成。如图所示,属于共用磁通环142的多个周向相邻的突刺156由单个共同的叠层件148形成。更具体地,在所示的实施例中,同一磁通环142的多个周向相邻的突刺156的突刺主体158由单个叠层件148形成。
每个突刺156均可以与其磁通环142的枝部150、主干152和/或箍154接通(contiguous)。这样,单个磁通环142的突刺156、枝部150、主干152和/或箍154可以由单个叠层件或多个叠层件形成。突刺阵列146的每个突刺156由此可以由共同的叠层件形成。在所示的实施例中,形成磁通环142a-142f的叠层件148是接通的(contiguous)件。这样,每个磁通环142a-142f的叠层部分均由接通的叠层形成。突刺156、枝部150、主干152和/或箍154可以具有相对于公共轴线CA径向延伸(例如,正交)的叠层纹理(laminate grain)。这种叠层纹理可以仅径向定向。
如图4B所示,定子44由相组件50a-05c的阵列形成。相组件50a-50c沿着公共轴线CA排列。每个相组件50a-50c分别包括一对圆形突刺阵列146a-146b、146c-146d、146e-146f。因此,相组件50a包括成对的圆形突刺阵列146a、146b;相组件50b包括成对的圆形突刺阵列146c、146d;相组件50c包括成对的圆形突刺阵列146e、146f。在本实施例中,每个相组件50a-50c分别包括一对磁通环142a-142b、142c-142d、142e-142f。每对圆形突刺阵列146a-146b、146c-146d、146e-146f分别由轴向返回部144连接。每对磁通环142a-142b、142c-142d、142e-142f分别由轴向返回部144连接。
每个相组件50均包括轴向地设置在该相组件50的成对磁通环142之间的线圈52。线圈52围绕公共轴线CA周向地延伸,使得公共轴线CA延伸穿过由每个线圈52形成的环。所述线圈52轴向地设置在每个相组件50的叠层部分之间。每个线圈52由此被叠层堆叠括住。
轴向返回部144在成对的磁通环142之间延伸并连接成对的磁通环142以形成相组件50。轴向返回部144围绕公共轴线CA布置并且形成用于每个相组件50的轴向返回部144的圆形阵列。轴向返回部144被布置在线圈52的与转子42相反的径向侧上。轴向返回部144设置在线圈52的与永磁体阵列46相反的径向侧上。轴向返回部144的阵列限定了圆柱体,公共轴线CA延伸穿过该圆柱体。轴向返回部144设置在枝部150的与突刺156相反的径向侧上。轴向返回部144可以与相组件50的每个磁通环142的叠层直接接触。例如,每个轴向返回部144可以直接接触每个枝部150的与突刺156相对的径向侧。在所示的示例中,轴向返回部144直接接触每个枝部150的径向内侧,因为马达24是在外转子式的。
每个轴向返回部144均由叠层的叠堆形成,这些叠层具有轴向的(即,平行于公共轴线CA)的纹理取向。轴向返回部144的叠层纹理可以仅是轴向的。因此,轴向返回部144的叠层纹理可以正交于形成磁通环142的叠层的叠层纹理。因此,马达24可以包括围绕公共轴线CA设置的一个或更多个轴向定向的叠层阵列。一个或更多个轴向定向的叠层阵列限定了与公共轴线CA同轴并且因此彼此同轴的圆柱体。如本文进一步解释的,轴向返回部144在形成相组件50的一对磁通环142的每个磁通环142之间传导电磁通量。在所示的示例中,轴向返回部144的第一阵列在成对磁通环142a-142b之间传导电磁通量;轴向返回部144的第二阵列在成对的磁通环142c-142d之间传导电磁通量;轴向返回部的第三阵列在成对的磁通环142e-142f之间传导电磁通量。轴向返回部144在每个相组件50的成对磁通环142之间传导电磁通量。同样,轴向返回部144在每对圆形突刺阵列146a-146b、146c-146d、146e-146f之间传导电磁通量。同样,轴向返回部144在成对的磁通环142的轴向相邻的枝部150之间传导电磁通量。如本文进一步解释的,成对的磁通环142a-142b、142c-142d、142e-142f的突刺156和因此成对的圆形突刺阵列146a-146b、146c-146d、146d-146f形成穿过定子44的多个磁通回路,其磁性地作用在转子42的磁体138上以使转子34相对于定子44旋转。
沿着公共轴线CA到移位构件34(和容积泵28的(多个)泵送室,以及容积泵28的主体36)最近的磁通环142和/或叠层148和/或突刺156(或将磁通量引导到磁体138的其他叠层结构)比沿着公共轴线CA最近的线圈52在轴向上更近。这部分地是因为线圈们不存在相对于马达24轴向延伸的端匝,如下面更详细论述的。
图5A是相组件50a的立体图。图5B是相组件50a的立体图,其中,为了清楚起见,移除了磁通环142a。将一起论述图5A和图5B。虽然更详细地示出和论述了相组件50a,但是应当理解,其他相组件50b、50c(在图4B中最佳地可见)在结构和功能上可以相同,唯一的区别是通过相组件50a-50c的线圈52传递的信号相对于彼此异相。此外,相组件50a一50c可以围绕公共轴线CA相对于彼此被转动以形成定子44。磁通环142a包括圆形突刺阵列146a、枝部150a、主干152a、箍154a和突刺156a。磁通环142b包括圆形突刺阵列146b、枝部150b、主干152b、箍154b和突刺156b。
相组件50a由一对磁通环142a、142b形成,线圈52轴向地夹在成对磁通环142a-142b之间。每个线圈52是绕公共轴线CA的导线(通常为铜)绕组。因此,每个线圈52可以是具有围绕公共轴线CA的20、30、40、50、100个或更少或更多圈的连续绕组。在一些实施例中,带被缠绕而不是丝。每个线圈52具有两个终端导线162a、162b,它们代表每个线圈52的电路的端部。图5B最佳地显示了线圈52的导线端部162a、162b,用于通过线圈52传递AC信号,线圈52可以与控制器29电连接。
线圈52与相组件50a的突刺156a、156b径向地重叠,这是由于突刺156a、156b中的每一个的一部分沿着公共轴线CA轴向突出。因此,从公共轴线CA延伸的径向线可以穿过线圈52中的每一个和相组件50的突刺156的一部分。径向线可以延伸通过轴向返回部144、线圈52和突刺156的一部分。在所示的示例中,粉末金属末端部160在线圈52上轴向延伸。因此,从公共轴线CA延伸的径向线可以延伸穿过叠层(例如,轴向返回部144的叠层)、线材(例如,线圈52)和粉末金属(例如,粉末金属末端部160的粉末金属)。在一些其他实施例中,突刺156不轴向突出而是仅径向突出(朝向或远离公共轴线CA)。
线圈52直接设置在成对的磁通环142a、142b之间。线圈52设置在成对的磁通环142a、142b之间形成的轴向间隙中。更具体地,线圈52直接位于形成磁通环142a的叠层和形成磁通环142b的叠层之间。线圈52的至少一部分直接位于成对的磁通环142a、142b的相对枝部150a、150b之间。线圈52的至少一部分直接位于成对的圆形突刺阵列146a、146b的每对突刺156a、156b的部分之间(例如,突刺阵列146a的突刺156a和突刺阵列146b的突刺156b)。线圈52直接轴向地位于成对的圆形突刺阵列146a、146b的由叠层形成的部分之间。因此,线圈52由叠层轴向地支撑/括住。
线圈52与轴向返回部144径向地重叠。在该特定实施例中,线圈52径向夹在轴向返回部144和突刺156a、156b的部分之间,因为突刺156a、156b各自具有轴向突出部分。因此,线圈52设置在与公共轴线CA同轴并且由轴向返回部144和磁通环142a、142b限定的环形室中。在所示的示例中,环形室的四个侧面中的三个(例如,两个轴向侧面和一个径向侧面)是通过叠层而形成的。在所示的示例中,环形室的四个侧面之一由粉末金属部件(例如,突刺156a、156b的粉末金属末端部160)形成。然而,应当理解,一些示例包括具有所有四个侧面由叠层限定的环形室。在一些示例中,环形腔室可以有三侧面,例如在突刺156a、156b不包括轴向延伸部件的情况下。
图6A和图6B展示了如何通过突刺156a、156b中那些磁通配对的突刺形成磁通回路。图6C示出了与转子42的永磁体阵列46相互作用的相组件50a的磁通配对的突刺156a、156b的详细视图。将一起论述图6A-图6C。磁通配对的突刺指的是相组件50的相对圆形突刺阵列146的相应最近的突刺对156(例如,相组件50a的相对的圆形突刺阵列146a、146b的最近的突刺对156a、156b)。虽然突刺156a、156b在图6A-图6C中被突出显示为突刺中的磁通配对的突刺,但是应当理解,这些是示例,并且磁通环142a、142b的所有突刺156a、156b类似地穿过圆形突刺阵列146a、146b地磁通配对。
每个突刺156a是带有与其对应的磁通配对突刺156b的相似磁通回路的一部分。磁通配对的突刺156a、156b通常与相对的圆形突刺阵列146a、146b的突刺156a、156b轴向地配对,而不是在圆周上与同一圆形突刺阵列146a、146b的相邻突刺156a、156b配对,因为所有圆形突刺阵列146a的突刺156a在任何给定时间将具有相同的极性,而同一相组件50a的相对的圆形突刺阵列146b的所有突刺156b将在任何给定时间具有相反的极性。更具体地,圆形突刺阵列146a的每个突刺156a与线圈52的另一个轴向侧上的圆形突刺阵列156b的最近的突刺156b磁通配对。如图6A和图6B所示,通过磁通配对的突刺156a、156b形成磁通回路,使得突刺156a、156b分别被极化——北极化和南极化。
磁通由线圈52产生。具体地,AC信号通过每个线圈52,其会快速建立和破坏磁场,因为通过线圈52的AC信号的电流反向。如图所示,磁通环142a、142b和轴向返回部144的磁通集中材料围绕在线圈52的至少三个侧面上。在图6A和图6B中示出磁通集中材料的叠层纹理。通常,磁通沿着叠层方向与纹理一起流动,因为磁通通常会沿着磁导率最高的路径流动,并且对磁通从一层叠层跳到另一层叠层有很大的阻力。枝部150a、150b(包括除了粉末金属末端部160之外的突刺156a、156b)的叠层纹理是径向地定向的,而轴向返回部144的叠层纹理是轴向地定向的。因此,磁通U形地轴向流过轴向返回部144并且径向地流过枝部150a、150b和突刺156a、156b从而朝向转子42,U形的底部在线圈52的与转子42相反的一侧,并且U形支腿朝向转子42。图6A和图6B表示AC信号的反转以及磁通配对的突刺156a、156b的磁极如何切换。
突刺156a、156b中的磁通配对的突刺彼此周向地偏移,使得突刺156a不与突刺156b轴向对齐。磁通配对的突刺156a、156b的端部没有轴向地对齐,这是因为突刺156a从突刺156b周向地偏移,所以磁通回路在突刺156a、156b的磁通配对的突刺之间周向地行进至少有限的距离。因此,包括多个磁通配对的突刺156a、156b的累积磁通回路可以以螺旋模式周向地流过突刺156a、156b和轴向返回部144。注意,虽然大多数磁通量在磁通配对的突刺156a、156b之间流动,但是枝部150a、150b允许同一枝部150a、150b的突刺156a、156b之间的磁通量流动,使得有限量的磁通量可以跳过磁通配对的突刺156a、156b而流向同一个枝部150a、150b的下一个突刺156a、156b。
图6C示出定子44的磁通配对的突刺156a、156b与转子42的集中器140和磁体138相互作用的详细视图。流过线圈52的AC信号快速改变电流方向并且因此快速改变磁通配对的突刺156a、156b的南北极性。图6C示出了圆形突刺阵列146a的所有突刺156a具有北极而圆形突刺阵列146b的所有突刺156b具有南极的实例。同样在这种情况下,突刺156a、156b与周向地设置在磁体138之间的集中器140对齐。集中器140的叠层不具有固有的极性,但由于集中器140在磁极之间的固定位置,集中器140在效果上表现出如图所示的永久极化。每个集中器140接触两个磁体138。每个集中器140接触两个磁体138的同一极。例如,集中器140将与两个南极接触或与两个北极接触。取决于与集中器140相邻的极性,集中器140在每个磁体138的相对侧呈现交替的北极和南极。如图所示,每个磁体138在其短轴的相对侧永久地被极化成北极和南极。磁体138和集中器140的交错布置产生相反极化的集中器140和磁体138磁极。
集中器140将磁通从磁体138引向定子126。磁通回路在定子44和转子42之间的气隙60上完成。来自转子42(特别是磁体138)的磁通和来自线圈52(通过突刺156a、156b)的磁通在气隙152中相互作用,并且产生的磁通剪切力迫使转子42旋转。该马达24的磁通具有横向于旋转轴线(该旋转轴线与共轴CA同轴)的取向。这与传统交流和直流无刷马达的径向磁通量方向不同。
由定子44产生并作用在转子42上的磁通是不断变化的,这既是由于因转子42的旋转引起的磁体138和集中器140的位置变化,也是由于因通过线圈52的AC信号的变化而引起的突刺156a、156b的极性变化。因此,经过线圈52的AC信号与转子42的旋转同步,以通过突刺156a、156b产生及时对应于集中器140(其正在接近和离开突刺156a、156b)的磁场,以便同时推动和拉动转子42的磁体138以提供使转子42旋转的力。更具体地,在对准接近和离开时,N-N和S-S界面排斥而N-S吸引。
相应的AC信号(例如,正弦形或梯形)相对于彼此异相。这样,与同步正弦AC信号相比,磁体138(沿它们的长度)更频繁地具有作用在其上的磁通量峰值,以获得沿转子42的旋转轴线(这也是公共轴线CA)作用在转子42上的更平滑的转矩分布。图2、图4A和图4B所示的马达24的实施例包括三个相,其与三个相组件50a-50c和其中的线圈52相对应,其中,三个120度电偏移的正弦AC信号通过线圈52传递。如果有两个相组件50和两个线圈52,则两个正弦AC信号将相隔180度,或者对于四个相组件50的组相隔90度。
由于磁体138是长形的并且与多个线圈52径向地重叠,所以每个磁体138均被多个线圈52电磁作用。更具体地,在所示的示例中,每个磁体138均可以被三个线圈52同时沿着磁铁142的长度方向电磁作用。因此,多个不同的线圈52可以同时电磁地作用在每个磁体138上。此外,在整个操作过程中,每个磁体138可以仅由三个线圈52(或在两相马达24实施例中仅两个线圈52,或在四相马达24实施例中仅四个线圈52等)电磁作用。这与传统的AC感应马达不同,在传统的AC感应马达中,每个磁体都将围绕转子的旋转轴线与传统的环形绕组阵列的所有绕组相互作用。由于每个磁体138沿其长轴对称,所以马达24具有多个定子相但连续的转子相。
传统的AC感应马达使用多个离散的线圈,这些线圈形成围绕转子的旋转轴线周向地延伸的线圈阵列(参见图10A和图10B)。每个线圈代表一个作用在磁铁上的潜在的极。在传统的AC感应马达中,围绕旋转轴周向地排列的离散线圈彼此异相。在任何给定情况下,离散线圈都可以与一小部分磁体相互作用。产生的潜在转矩与极数成正比。这种马达中的极数受限于围绕马达内的旋转轴线周向地安装离散线圈的能力。线圈绕组可以做得更小,定子的直径可以做得更大,以容纳更多的线圈以支持更多的磁极,但这会增加马达的尺寸、重量和成本,并且仍然有限制。当转子以相对较高的速率旋转时,也可以增加功率,从而每单位时间可以经历更多的线圈-磁铁通过。然而,这种功率增加需要马达以相对较高的速度运行,而某些应用可能需要低速输出。提供减速传动机构以降低速度并将扭矩增加到所需的高扭矩和低速度会增加成本、重量、尺寸和摩擦。
根据本公开内容的马达24不同于传统的AC和DC无刷马达。马达24的一个方面是它包含相对较少的线圈52,在所示的实施例中只有三个。与传统的AC和DC无刷马达不同,线圈52由完全围绕转子42的旋转轴线(和公共轴线CA)延伸的线环形成。转子42的旋转轴线(和公共轴线CA)延伸通过每个环(例如,每个环的中心)。每个线圈52是环形的,并且每个线圈52的环同样是环形的,并且线圈52和环的圆形平面轮廓正交于公共轴线CA。每个线圈52的导线形成单个线箍,该线箍具有多个环,这些环重叠并相互接触以形成单个线箍组件。线圈52不包括这样的环,所述环产生使转子42旋转、公共轴线CA不延伸穿过其中的磁通。与在传统的AC感应马达中为每个磁极添加线圈不同,围绕单个线圈52的枝部150和轴向返回部144将磁通引导到多个突刺156,这些突刺156在整个枝部150上磁通配对以产生多个磁极。在所示的示例中,对于每个相组件50,一个线圈52支撑三十个磁极,因为示例磁通环142每个包括三十个突刺156,但是可以根据圆形突刺阵列138的突刺156的数量来创建更少和更多的磁极。因此,激活一个线圈52将激活许多极,而在一些传统的AC和DC无刷马达中激活一个线圈仅激活一个极。在一些示例中,每个线圈52可以在给定情况下与每个磁体138相互作用。此外,多个线圈52作为多个相组件50的一部分沿转子42的旋转轴线排列,从而使极数成倍增加。
高极数消除或减少对减速齿轮的需要,并进一步减小偏心力以及减轻重量和摩擦,从而允许泵设备12的更紧凑的布置。由于泵送应用通常在低速下进行,本马达24设计允许的高极数意味着即使在低泵送速度、极少或没有传动减速的情况下,高扭矩也能产生高流体压力,这再次降低了成本、重量、摩擦和封装尺寸。至少出于这些原因,本公开内容的马达24可以以小封装尺寸产生高扭矩,即使在泵通常运行的低速下也是如此。因此,可以最小化或完全排除驱动器的传动减速,从而节省成本、尺寸、重量和摩擦力。
图7是泵设备12’的示意图。泵设备12’包括马达24’、驱动器26和容积泵28’。马达24’是内转子式的,其具有设置在定子44’内的转子42’。转子42’在定子44’内旋转。除了定子44’的突刺156朝向公共轴线CA和朝向内转子42’径向向内延伸,而外转子式的突刺156相对于公共轴线CA径向向外伸出并且朝向外转子42,定子44’与定子44基本相似(最佳地如图5A所示)。除了永磁体阵列46相对于转子42’设置在转子42’的径向外侧而外转子马达的永磁体阵列46布置在外转子42的径向内侧,转子42’基本上类似于转子42(最佳地如图2和图5A所示)。
在所示的示例中,容积泵28’包括入口止回阀58a和出口止回阀58c,它们可以是任何所需形式的单向阀,例如球阀和座阀以及其他选项。入口止回阀58a和出口止回阀58c中的每一个相对于公共轴线CA是静止的。泵送室164流体连接到入口止回阀58a和出口止回阀58c中的每一个。泵送室164的容积随着流体移位构件34被轴向地拉向马达24’而增加,并且泵送室164的容积随着流体移位构件34被轴向地驱动远离马达24’而减小。在所示的示例中,容积泵28’是单容积泵,其仅在泵行程之一期间向下游驱动流体。然而,应当理解,容积泵28’可以是类似于容积泵28(图1A-图3C)的双容积泵,使得容积泵28’在泵循环的每个行程期间输出流体。
沿着公共轴线CA到移位构件34(和泵送室164)最近的磁通环142和/或叠层件148和/或突刺156(或将磁通量引导到磁体138的其他叠层结构)被定位于比轴向地最近的线圈52更靠近容积泵28’(和泵送室164)的轴向位置处。这部分地是因为线圈52没有轴向延伸的端匝。由此,泵设备12’提供紧凑、有效的泵送装置。
图8是泵设备12”的示意性框图。虽然本文提及的各种其他实施例可以具有线性地往复运动的流体移位构件34,但是本实施例,和各种其他实施例,的流体移位构件34’旋转并且可以往复运动或可以不往复运动。图8的泵设备12”包括具有转子42的马达24,转子42在定子44的内部或外部旋转。定子44包括产生磁的多个线圈52(在本实施例中为三个,但在各种其他实施例中可以提供更多或更少的数量)磁通通过定子44以驱动转子42。转子42与公共轴线CA同轴地旋转。流体容积泵28”包括旋转的流体移位构件34’。流体移位构件34’可以沿着公共轴线CA是长形的。流体移位构件34’可以与公共轴线CA同轴。流体移位构件34’可以相对于公共轴线CA同轴地旋转。流体移位构件34’的旋转可以泵送流体。转子42的旋转轴线AR可以与流体移位构件34’的旋转轴线AR2同轴。
图8的容积泵28”可以是渐进腔泵(progressive cavity pump)、叶片泵(vanepump)、转子泵(impeller pump)或蠕动泵,以及其他选项。在转子42和旋转流体移位构件34’之间可能没有机械放大。例如,在转子42和旋转流体移位构件34’之间可能没有齿轮机构/传动件(gearing),或者可能在整个泵设备12”上没有齿轮机构/传动件。转子42和旋转流体移位构件34’可以被固定,使得转子42的一转导致旋转流体移位构件34’的一转。
在蠕动泵的情况下,旋转流体移位构件34’可以是在包含柔性管的外壳内旋转的转子类型,形成流体移位构件34’的转子顺着移动以便渐进且重复地沿着柔性管的长度的一部分对着外壳的内部挤压;当旋转流体移位构件34’旋转时,转子重复地开始并释放其沿着管的长度对柔性管的挤压。
在叶片泵的情况下,旋转流体移位构件34’可以是在外壳内旋转的转子。两个叶片可以在壳体内从形成流体移位构件34”的转子沿相反方向突出。叶片可以支撑在一个或更多个弹簧上以允许叶片移入和移出转子以适应外壳的内部形状。外壳可以与公共轴线CA同轴。转子可以围绕与公共轴线CA同轴的旋转轴线旋转。
图9是示出作为渐进腔泵的容积泵28”的示意性框图。内转子马达24’连接到流体移位构件34’以引起容积泵28”的泵送。在本实施例中,旋转流体移位构件34’是螺旋转子166。螺旋转子166在渐进腔定子壳体168内旋转。螺旋转子166可以包括翅片,如图所示,用于推进或以其他方式移动液体,例如作为水。渐进腔定子外壳168内侧上的弹性体形成一系列包括叶部(lobes)的腔体,螺旋转子166进入和退出叶部以将多个相应的腔(pockets)从泵的一端逐渐移动到另一端,流体在压力下移动通过所述腔。螺旋转子166可以围绕公共轴线CA旋转。螺旋转子166可以相对于公共轴线CA同轴地旋转。在一些实施例中,螺旋转子166可以设置在具有圆柱形内部轮廓(例如,不是渐进腔体)的管的内部,或者螺旋转子166可以完全暴露在被移动的液体介质中,而没有围绕螺旋转子166的外套筒。
如本文中论述的,根据本公开内容的设备可以具有各种优点。一个优点可以是减少流体移位构件的倾斜(canting),这种倾斜原本会导致侧向加载和过早失效。图10示出了可操作地连接到泵28的马达24的示意图。具体地,示出了磁通环142。如前文所述和所示的,突刺156的环形阵列(图10中未示出)被线圈(图10中未示出)同时极化为相同的极性,完全围绕磁通环142。这被表示关于磁通环142的“+”符号,然而取决于相周期的部分,其也可以是“-”。图10进一步示出了马达24的相组件50。相组件50被标记为A、B和C,代表三个相,以120度电偏移操作。这样,相位沿着公共轴线运行。如图所示,每个相组件50均包括第一磁通环142A和第二磁通环142B。第一磁通环142A和第二磁通环142B的每个磁通配对的组的突刺分别为相反极性的正极和负极,显示为“+”和“-”。磁通环142A、142B的每个极同时围绕公共轴线CA360度地被正极或负极化。每个相组件50的第一磁通环142A和第二磁通环142B之间的相反极化方向随着相组件50的相应的线圈的正弦输入信号而变化。由于第一磁通环142A和第二磁通环142B轴向排列并且被相反地加载,则可以在它们和转子的磁体之间产生轴向力,除了这种轴向力由于两个相反极化的第一磁通环142A和第二磁通环142B而被平衡和抵消。每个环142A、142B均完全围绕公共轴线CA极化,从而平衡载荷。随着时间的推移,磨损可能会降低任何马达的正常功能,并且这种退化可能导致第一磁通环142A和第二磁通环142B之间相对于磁体的不平衡(例如由于损耗或缺陷,在诸如线圈的材料中),这种不平衡,由于轴向地定向的相,将仅沿着公共轴线轴向推动马达24,并且因此推动驱动器26和流体移位构件34。这种不期望的力不会导致问题,因为泵28被配置成使流体移位构件34轴向移动。因此,马达24防止流体移位构件34上的不希望的侧向载荷。
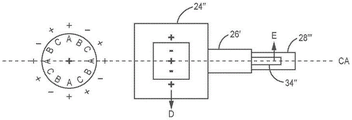
图11示出了由常规径向磁通电动马达24”操作的泵28”’的示意图,其中线圈围绕公共轴线而不是沿着公共轴线排列。因此,相A、B、C围绕公共轴线排列。泵28”’可以基本上类似于泵28、28’、28”中的任何一个。不仅可以用于围绕公共轴线均匀分布力的磁极更少,而且由于磨损而导致的相位不平衡都会在转子上产生力矩,如由所示的向下的力示出的。这与关于图10所论述的产生轴向力的不平衡形成对比。马达24”上的这种错误力将使马达24”围绕驱动器26’转动,驱动器26’可以与驱动器26’基本相似,在驱动器26’中存在任何游隙的程度,从而推动流体移位构件34”偏离公共轴线并加载流体移位构件34”的侧面,这会导致流体移位构件34”过早地磨损,特别是如果依靠流体移位构件34”来提供动态密封表面,例如在其是活塞的情况下。马达24”中的径向力D可引起泵28”’中的径向反作用力E。因此,根据本公开内容的马达在操作泵和类似的流体移动设备方面具有优于传统径向磁通马达的优点。
图12A是现有技术的泵设备200的示意性框图。图12B是传统的AC感应马达202的现有技术的示意性端视图。如图所示,线圈212的端匝210比钢叠层214和磁体216更靠近流体移位构件34地延伸。这些端匝210除了将线圈212的环返回以与钢叠层214重叠之外几乎没有什么用处。没有这种端匝210,如马达24、24’中的情况,减少了马达的长度并消除了与这种端匝210相关的重量和成本。
现有技术的泵设备200包括由减速齿轮220形成的驱动器218,其增加扭矩并降低马达202输出的速度。减速齿轮220将泵222,特别是流体移位构件224连接到马达202。流体移位构件224在与马达202的转子的旋转轴线不对齐的轴线上往复运动。在所示的示例中轴线是横向的。齿轮装置220增加了偏移和额外的结构,导致流体移位构件224的轴线与马达202的轴线不对齐。
虽然本公开内容和权利要求的泵送组件是在喷射系统的背景下论述的,但是应当理解,泵送组件和控制装置可以在各种流体移动背景和系统中使用并且不限于所论述的那些。所论述的任何一个或更多个泵送组件可单独使用或与一个或更多个附加泵一起使用以移动流体用于任何所需目的,例如位置转移、喷洒、计量、应用、推进等。
尽管已经参考示例性实施例描述了本发明,但是本领域技术人员将理解,在不脱离本发明的范围的情况下,可以进行各种改变并且可以用等效物代替其元件。此外,可以进行许多修改以使特定情况或材料适应本发明的教导而不脱离本发明的基本范围。因此,旨在本发明不限于所公开的特定实施例,而是本发明将包括落入随附的权利要求范围内的所有实施例。
Claims (56)
1.一种用于泵送流体的泵设备,所述泵设备包括:
电动马达,其被配置为产生旋转输出,所述电动马达包括:
转子,其被配置为围绕公共轴线旋转,所述转子包括多个磁体,每个磁体均为长形并且平行于所述公共轴线延伸,所述多个磁体围绕所述公共轴线环形地排列;和
定子,其被配置为被通电以产生使所述转子旋转的磁通,所述定子包括:
多个线圈,所述多个线圈沿着所述公共轴线排列,所述多个线圈中的每个线圈均与所述公共轴线同轴;和
多个圆形突刺阵列,其沿着所述公共轴线排列,所述多个圆形突刺阵列中的每个圆形突刺阵列分别包括:
多个突刺,其排列在与所述公共轴线同轴的圆中,所述多个突刺的所有突刺均被配置为由所述多个线圈中的线圈同时极化以产生使所述转子相对于所述定子旋转的磁通;
驱动器,其被配置为将来自所述电动马达的旋转输出转换为线性往复输出;和
流体移位构件,其被配置为接收来自所述驱动器的线性往复输出,以沿着所述公共轴线线性地往复运动以泵送流体。
2.根据权利要求1所述的泵设备,其中,所述多个线圈沿着所述公共轴线排列,使得每个线圈在径向上不与所述多个线圈中的任何其他线圈重叠。
3.根据权利要求2所述的泵设备,其中,与一个或更多个线圈中的最接近的线圈相比,所述多个突刺中沿着所述公共轴线最接近的突刺更靠近所述流体移位构件。
4.根据权利要求2所述的泵设备,其中,对于每个圆形突刺阵列,所述多个突刺中的每个突刺相对于所述公共轴线径向地朝向所述转子突出,以将集中的磁通朝向所述转子聚焦。
5.根据权利要求4所述的泵设备,其中,所述多个突刺中的每个突刺的周向宽度随着所述突刺朝向所述转子延伸而变窄。
6.根据权利要求1-5中任一项所述的泵设备,其中,所述多个突刺中的每个突刺均包括金属。
7.根据权利要求1-5中任一项所述的泵设备,其中,所述多个突刺中的每个突刺均包括金属叠层的叠堆。
8.根据权利要求1-5中任一项所述的泵设备,其中,所述多个突刺中的每个突刺均包括粉末金属件。
9.根据权利要求1-5中任一项所述的泵设备,其中,所述多个圆形突刺阵列中的每个圆形突刺阵列均包括至少25个突刺。
10.根据权利要求1-5中任一项所述的泵设备,其中,所述多个圆形突刺阵列被布置为多组成对的圆形突刺阵列,所述成对的圆形突刺阵列具有第一圆形突刺阵列和第二圆形突刺阵列,并且所述一个或更多个线圈包括位于每组成对的圆形突刺阵列之间的相应的线圈。
11.根据权利要求10所述的泵设备,其中,每组成对的圆形突刺阵列均包括在所述第一圆形突刺阵列和所述第二圆形突刺阵列之间延伸的多个轴向返回部,以允许磁通回路将所述第一圆形突刺阵列和所述第二圆形突刺阵列上的突刺对极化。
12.根据前述权利要求中任一项所述的泵设备,其中,所述马达不包括具有端匝的线圈,所述端匝沿着所述公共轴线延伸超过所有所述突刺。
13.根据权利要求1所述的泵设备,其中,所述定子包括至少一个相组件,所述至少一个相组件包括所述一个或更多个线圈中的第一线圈,所述第一线圈轴向地设置在所述至少一个相组件的第一磁通环和所述至少一个相组件的第二磁通环之间。
14.根据权利要求13所述的泵设备,其中,所述第一磁通环包括多个枝部,每个枝部相对于所述公共轴线径向地延伸,所述第一磁通环的所述多个突刺相应地由所述多个枝部支撑,使得每个枝部支撑所述第一磁通环的所述多个突刺中的至少三个相应的突刺。
15.根据前述权利要求中任一项所述的泵设备,其中,所述转子包括多个磁体,每个磁体均具有长轴和与其长轴正交的短轴,每个磁体的长轴均平行于所述公共轴线延伸,并且每个磁体均被永久磁性地极化为分别在所述短轴的端部具有北极和南极。
16.根据权利要求15所述的泵设备,其中,一个或更多个线圈包括沿着所述公共轴线排列的三个线圈,其中,所述三个线圈中没有一个在圆周上与彼此重叠,并且其中,所述三个线圈中的每个线圈产生与所述多个磁体中的每个磁体相互作用的相应的磁场,以旋转所述转子。
17.根据前述权利要求中任一项所述的泵设备,其中,所述定子被配置为基于一个或更多个AC正弦信号产生磁通以旋转所述转子,所述一个或更多个AC正弦信号通过所述一个或更多个线圈分别提供。
18.根据前述权利要求中任一项所述的泵设备,其中,所述一个或更多个线圈中的每个线圈被定位成使得所述公共轴线延伸穿过每个线圈并且使得所述马达不包括一个公共轴线不延伸穿过其中的线圈。
19.根据前述权利要求中任一项所述的泵设备,其中,所述马达不包括沿着所述公共轴线位于共同的轴向位置处并且围绕所述公共轴线周向地排列的线圈。
20.根据权利要求1-15中任一项所述的泵设备,其中,所述一个或更多个线圈包括沿着所述公共轴线排列的三个线圈,所述三个线圈中的每个线圈均与所述公共轴线同轴。
21.根据权利要求1-14中任一项所述的泵设备,其中,与将磁通集中到所述马达的磁体的所述定子的任何金属叠层相比,所述一个或更多个线圈中没有一个线圈延伸得更靠近所述流体移位构件。
22.根据前述权利要求中任一项所述的泵设备,其中,所述驱动机构包括:长形的螺杆,所述螺杆与所述公共轴线同轴,所述螺杆被所述旋转输出驱动,使得所述螺杆或者围绕所述公共轴线旋转或者沿着所述公共轴线线性地往复运动,以及螺母,所述螺母与所述长形的螺杆相接以或者围绕所述公共轴线旋转或者沿着所述公共轴线性地往复运动。
23.根据权利要求22所述的泵设备,其中,所述驱动机构还包括螺母,所述螺母接合所述螺杆,使得所述螺杆和所述螺母中的一个旋转并且所述螺杆和所述螺母中的另一个线性地平移。
24.根据前述权利要求中任一项所述的泵设备,其中,所述流体移位构件是活塞。
25.根据权利要求1所述的泵设备,其中,所述定子包括:
沿着所述公共轴线布置的一个或更多个相组件,所述一个或更多个相组件中的每个相组件均包括所述一个或更多个线圈中的线圈,所述线圈轴向地布置在所述相组件的第一磁通环和所述相组件的第二磁通环之间。
26.根据权利要求25所述的泵设备,其中,所述第一磁通环和所述第二磁通环都是金属的。
27.根据权利要求25所述的泵设备,其中,所述一个或更多个相组件中的每个相组件还包括在所述第一磁通环和所述第二磁通环之间延伸并连接所述第一磁通环和所述第二磁通环的多个轴向返回部。
28.根据权利要求27所述的泵设备,其中,所述多个轴向返回部中的每个轴向返回部都是金属的。
29.根据权利要求27所述的泵设备,其中,所述线圈设置在与所述公共轴线同轴并且由所述第一磁通环、所述第二磁通环和所述多个轴向返回部限定的环形室中。
30.根据权利要求29所述的泵设备,其中,所述线圈径向地设置在所述多个轴向返回部和所述转子之间。
31.根据权利要求29所述的泵设备,其中,所述第一磁通环包括多个径向地朝向所述转子突出的第一突刺,并且所述第二磁通环包括多个径向地朝向所述转子突出的第二突刺。
32.根据权利要求31所述的泵设备,其中,所述多个第一突刺在所述线圈上方轴向地延伸,使得所述多个第一突刺中的每个第一突刺的至少一部分径向地设置在所述线圈和所述转子之间。
33.一种喷雾器,包括根据前述权利要求中任一项所述的泵设备。
34.根据权利要求33所述的喷雾器,其中,所述喷雾器是手持式的。
35.一种鼓形件卸载机,包括根据权利要求1-32中任一项所述的泵设备。
36.一种泵设备,包括:
电动马达,其包括定子和绕公共轴线同轴地旋转的转子,所述定子包括沿着所述公共轴线排列的多个线圈;
流体移位构件,其被配置为沿着所述公共轴线线性地往复运动以泵送流体;和
驱动机构,其轴向地位于所述马达和所述活塞之间,所述驱动机构将来自所述马达的旋转输出转换为驱动所述流体位移构件的线性往复输出;
其中,所述驱动机构被配置为使得:所述马达每转过第一数量的完整转数,所述流体移位构件就行进一英寸,其中,所述第一数量在0.9-3.0转的范围内,包括端值。
37.根据权利要求36所述的泵设备,其中,所述多个线圈沿着所述公共轴线轴向地间隔开。
38.根据权利要求36和37中任一项所述的泵设备,其中,所述转子在径向上设置在所述定子的外部。
39.根据权利要求36和37中任一项所述的泵设备,其中,所述转子在径向上设置在所述定子的内部。
40.一种泵设备,包括:
电动马达,其包括定子和绕公共轴线旋转的转子,所述定子包括沿着所述公共轴线排列的多个线圈;
流体移位构件,其被配置为沿着所述公共轴线CA线性地往复运动以泵送流体;和
驱动机构,其位于所述马达和所述活塞之间,所述驱动机构将所述马达的旋转输出转换为驱动所述活塞的线性往复输出,
其中,所述驱动机构被配置为使得:所述马达每转过X数量的完整转数,所述流体位移构件就完成一个泵冲程,其中,X在1-3的范围内,包括端值。
41.一种泵设备,包括:
电动马达,其包括定子和绕公共轴线旋转的转子,所述定子包括沿着所述公共轴线排列的多个线圈,每个线圈均围绕所述公共轴线延伸并与所述公共轴线同轴;
圆柱形活塞,所述活塞与所述公共轴线同轴,所述活塞被配置为沿着所述公共轴线线性地往复运动以泵送流体;和
驱动机构,其位于所述马达和所述活塞之间,所述驱动机构将所述马达的旋转输出转换为驱动所述活塞的线性往复输出。
42.根据权利要求41所述的泵设备,其中,所述多个线圈中的每个线圈相对于所述多个线圈中的其他线圈轴向地间隔开。
43.根据权利要求41所述的泵设备,其中,所述马达的沿着所述公共轴线最靠近所述圆柱形活塞的部分是由叠层形成的而不是由线圈形成的。
44.根据权利要求41所述的泵设备,其中,所述多个线圈中的每个线圈在轴向上设置在第一金属部件和第二金属部件之间。
45.根据权利要求44所述的泵设备,其中,所述多个线圈中的每个线圈在径向上设置在第三金属部件和所述转子之间。
46.一种用于移动液体的设备,所述设备包括:
被配置为产生旋转输出的电动马达,所述电动马达包括:
转子,其被配置为围绕公共轴线旋转,所述转子包括多个磁体,每个磁体均是长形的并且平行于所述公共轴线延伸,所述多个磁体围绕所述公共轴线环形地排列;和
定子,其被配置为被通电以产生使所述转子旋转的磁通,所述定子包括:
多个线圈,所述多个线圈沿着所述公共轴线排列,所述多个线圈中的每个线圈均与所述公共轴线同轴;和
多个圆形突刺阵列,其沿着所述公共轴线排列,所述多个圆形突刺阵列中的每个圆形突刺阵列分别包括:
多个突刺,其排列成与所述公共轴线同轴的圆,所述多个突刺的所有突刺均被配置为由所述多个线圈中的线圈同时极化以产生磁通,以使所述转子相对于所述定子旋转;和
流体移位构件,其被配置为通过所述转子来围绕所述公共轴线旋转以移动液体。
47.根据权利要求46所述的设备,其中,所述流体移位构件相对于所述公共轴线同轴地旋转。
48.根据权利要求46所述的设备,其中,所述流体移位构件和所述转子之间没有传动装置。
49.根据权利要求46-48中任一项所述的设备,其中,所述流体移位构件是渐进腔泵的转子、叶片泵的转子和蠕动泵的转子中的一个。
50.根据权利要求46所述的设备,其中,所述流体移位构件包括在渐进腔定子壳体内旋转的螺旋转子。
51.根据权利要求50所述的设备,其中,所述螺旋转子和所述渐进腔定子壳体中的一者或两者与所述公共轴线CA同轴。
52.根据权利要求50所述的设备,其中,所述螺旋转子与所述公共轴线同轴地旋转。
53.根据权利要求46-52中任一项所述的设备,其中,所述多个圆形突刺阵列被被布置为多组成对的圆形突刺阵列,所述成对的圆形突刺阵列具有第一圆形突刺阵列和第二圆形突刺阵列,并且所述多个线圈包括位于每组成对的圆形突刺阵列之间的相应的线圈。
54.根据权利要求46-53中任一项所述的设备,其中,所述多个磁体中的每个磁体在径向上与所述多个线圈中的每个线圈重叠。
55.根据权利要求46-54中任一项所述的设备,其中,所述马达不包括具有端匝的线圈,所述端匝定位成比所述突刺中的任何一个突刺更靠近所述流体移位构件。
56.一种用于移动液体的设备,所述设备包括:
被配置为产生旋转输出的电动马达,所述电动马达包括:
转子,其被配置为围绕公共轴线旋转,所述转子包括多个磁体,每个磁体均是长形的并且平行于所述公共轴线延伸,所述多个磁体围绕所述公共轴线环形地排列;和
定子,其被配置为被通电以产生使转子旋转的磁通,所述定子包括:
多个线圈,所述多个线圈沿着所述公共轴线排列,所述多个线圈中的每个线圈均与所述公共轴线同轴;和
多个圆形突刺阵列,其沿着所述公共轴线排列,所述多个圆形突刺阵列中的每个圆形突刺阵列分别包括:
多个突刺,其排列成与所述公共轴线同轴的圆,所述多个突刺的所有突刺均被配置为由所述多个线圈中的线圈同时极化以产生磁通,以使所述转子相对于所述定子旋转;和
流体移位构件,其被配置为被所述电动马达的输出移动,其中,所述定子的突刺中的至少一个突刺比所述多个线圈中的任何一个线圈都更靠近所述流体移位构件。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202063003021P | 2020-03-31 | 2020-03-31 | |
| US63/003,021 | 2020-03-31 | ||
| PCT/US2021/025133 WO2021202699A1 (en) | 2020-03-31 | 2021-03-31 | Pump with high torque drive |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115667716A true CN115667716A (zh) | 2023-01-31 |
Family
ID=77855700
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202180026336.3A Pending CN115667716A (zh) | 2020-03-31 | 2021-03-31 | 具有高扭矩驱动器的泵 |
Country Status (3)
| Country | Link |
|---|---|
| US (3) | US11193486B2 (zh) |
| EP (1) | EP4127473A1 (zh) |
| CN (1) | CN115667716A (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115667716A (zh) * | 2020-03-31 | 2023-01-31 | 固瑞克明尼苏达有限公司 | 具有高扭矩驱动器的泵 |
| CN112065207A (zh) * | 2020-09-17 | 2020-12-11 | 广东骏驰科技股份有限公司 | 一种新型电动电撑杆 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5312233A (en) | 1992-02-25 | 1994-05-17 | Ivek Corporation | Linear liquid dispensing pump for dispensing liquid in nanoliter volumes |
| DE4300512B4 (de) * | 1993-01-12 | 2007-05-24 | Bayerische Motoren Werke Ag | Antrieb für eine Kraftstoffpumpe von Fahrzeugen |
| US6092995A (en) | 1998-12-31 | 2000-07-25 | Uniflows Co., Ltd. | High precision pump for medical and chemical analyzers |
| DE10034095C2 (de) | 2000-07-13 | 2002-12-05 | Gerhard Jesse | Dosierpumpe |
| US7242118B2 (en) * | 2003-07-31 | 2007-07-10 | Japan Servo Co., Ltd. | Toroidal-coil linear stepping motor, toroidal-coil linear reciprocating motor, cylinder compressor and cylinder pump using these motors |
| US6943478B2 (en) | 2003-11-14 | 2005-09-13 | Dura-Trac Motors, Inc. | Brushless permanent magnet wheel motor with variable axial rotor/stator alignment |
| KR100785276B1 (ko) | 2005-12-29 | 2007-12-13 | 한국전기연구원 | 외전형 영구자석 여자 횡자속 전동기 |
| US20080179982A1 (en) * | 2007-01-30 | 2008-07-31 | Arvinmeritor Technology, Llc | Transverse flux, switched reluctance, traction motor with bobbin wound coil, with integral liquid cooling loop |
| US7492074B1 (en) * | 2007-03-30 | 2009-02-17 | Norman Rittenhouse | High-efficiency wheel-motor utilizing molded magnetic flux channels with transverse-flux stator |
| WO2009018149A1 (en) * | 2007-07-27 | 2009-02-05 | The Texas A & M University System | Short-flux path motors / generators |
| US8299677B2 (en) * | 2009-12-04 | 2012-10-30 | Hamilton Sundstrand Corporation | Transverse regulated flux machine |
| DE102009060959A1 (de) | 2009-12-30 | 2011-07-07 | Robert Bosch GmbH, 70469 | Transversalflussmaschine |
| US8053944B2 (en) * | 2010-03-15 | 2011-11-08 | Motor Excellence, Llc | Transverse and/or commutated flux systems configured to provide reduced flux leakage, hysteresis loss reduction, and phase matching |
| DE102010018145B4 (de) | 2010-04-24 | 2012-07-26 | Kolektor Group D.O.O. | Dynamoelektrische Maschine der Klauenpolbauart |
| EP2641316B1 (en) | 2010-11-17 | 2019-02-13 | Motor Excellence, LLC | Transverse and/or commutated flux systems having segmented stator laminations |
| WO2012067896A2 (en) | 2010-11-17 | 2012-05-24 | Motor Excellence, Llc | Transverse and/or commutated flux systems having laminated and powdered metal portions |
| US8749108B2 (en) * | 2011-03-15 | 2014-06-10 | Electric Torque Machines, Inc. | Transverse and/or commutated flux systems having laminated and powdered metal portions |
| US9236773B2 (en) | 2013-08-16 | 2016-01-12 | Electric Torque Machines Inc | Segmented stator with controlled eddy current |
| US10046351B2 (en) * | 2014-07-14 | 2018-08-14 | Graco Minnesota Inc. | Material dispense tracking and control |
| US10594192B1 (en) * | 2015-08-20 | 2020-03-17 | Anoup Kaul | Brushless motor/generator |
| AU2016277738B2 (en) * | 2015-12-30 | 2021-07-22 | Graco Minnesota Inc. | Fluted piston components for pumps |
| CN115667716A (zh) * | 2020-03-31 | 2023-01-31 | 固瑞克明尼苏达有限公司 | 具有高扭矩驱动器的泵 |
-
2021
- 2021-03-31 CN CN202180026336.3A patent/CN115667716A/zh active Pending
- 2021-03-31 EP EP21721274.5A patent/EP4127473A1/en active Pending
- 2021-04-09 US US17/226,712 patent/US11193486B2/en active Active
- 2021-11-04 US US17/453,592 patent/US11473576B2/en active Active
-
2022
- 2022-09-15 US US17/945,598 patent/US20230019323A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20220056909A1 (en) | 2022-02-24 |
| US11473576B2 (en) | 2022-10-18 |
| US20210301819A1 (en) | 2021-09-30 |
| EP4127473A1 (en) | 2023-02-08 |
| US11193486B2 (en) | 2021-12-07 |
| US20230019323A1 (en) | 2023-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11867165B2 (en) | Drive system for a positive displacement pump | |
| US20070237658A1 (en) | Magnetically driven valveless piston pumps | |
| US5286176A (en) | Electromagnetic pump | |
| US10323631B2 (en) | Electric pump | |
| US20230019323A1 (en) | Pump with high torque drive | |
| US20160013711A1 (en) | Reciprocating Electric Motor | |
| US8587163B2 (en) | Electric motors and related systems for deployment in a downhole well environment | |
| US20010003802A1 (en) | Magnetic spring and ventricle assist device employing same | |
| US7695253B2 (en) | Magnetic displacement pump and compressor | |
| CN115362318A (zh) | 泵驱动系统 | |
| WO1990012962A1 (en) | Electric motor driven diaphragm pump | |
| CN212155076U (zh) | 一种高功率密度动圈式电磁直驱液压泵 | |
| US3089425A (en) | Magnetic pump | |
| WO2021202699A1 (en) | Pump with high torque drive | |
| CN112243489A (zh) | 带有线性电机的计量泵 | |
| US20080232988A1 (en) | Material Pump | |
| EP2005564B1 (en) | Electromagnetic transducer apparatus | |
| US5905355A (en) | Pump-motor apparatus | |
| CN111120241A (zh) | 一种往复增压泵 | |
| Ravikumar | Dual side double acting reciprocating pump using scotch yoke mechanism | |
| CN111207054B (zh) | 一种空压机 | |
| RU2117185C1 (ru) | Микрокомпрессор | |
| JPH0747950B2 (ja) | フリーピストン式の流体処理装置 | |
| US20200251972A1 (en) | Electrical pump drive for a positive displacement pump, positive displacement pump and method therefor | |
| RU93014348A (ru) | Электромагнитный насос |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |