CN115402358A - 一种低能耗的自动驾驶电动汽车车道级运行方案规划方法 - Google Patents
一种低能耗的自动驾驶电动汽车车道级运行方案规划方法 Download PDFInfo
- Publication number
- CN115402358A CN115402358A CN202211354086.9A CN202211354086A CN115402358A CN 115402358 A CN115402358 A CN 115402358A CN 202211354086 A CN202211354086 A CN 202211354086A CN 115402358 A CN115402358 A CN 115402358A
- Authority
- CN
- China
- Prior art keywords
- lane
- vehicle
- interval
- speed
- vehicles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 63
- 238000005265 energy consumption Methods 0.000 title claims abstract description 55
- 230000008859 change Effects 0.000 claims abstract description 64
- 238000013210 evaluation model Methods 0.000 claims abstract description 11
- 230000008569 process Effects 0.000 claims description 19
- 230000014509 gene expression Effects 0.000 claims description 14
- 238000004590 computer program Methods 0.000 claims description 13
- 238000003860 storage Methods 0.000 claims description 11
- 238000005096 rolling process Methods 0.000 claims description 10
- 230000006870 function Effects 0.000 claims description 9
- 230000001133 acceleration Effects 0.000 claims description 7
- 238000012937 correction Methods 0.000 claims description 6
- 230000011218 segmentation Effects 0.000 claims description 4
- 230000002068 genetic effect Effects 0.000 claims description 3
- 238000005259 measurement Methods 0.000 claims description 3
- 238000005457 optimization Methods 0.000 claims description 3
- 230000008901 benefit Effects 0.000 description 4
- NFLLKCVHYJRNRH-UHFFFAOYSA-N 8-chloro-1,3-dimethyl-7H-purine-2,6-dione 2-(diphenylmethyl)oxy-N,N-dimethylethanamine Chemical compound O=C1N(C)C(=O)N(C)C2=C1NC(Cl)=N2.C=1C=CC=CC=1C(OCCN(C)C)C1=CC=CC=C1 NFLLKCVHYJRNRH-UHFFFAOYSA-N 0.000 description 2
- 238000007726 management method Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000011002 quantification Methods 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
Abstract
本发明提出一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,属于交通运行方案规划技术领域。包括:S1.将道路进行区间划分和车道线分割,确定车道编号规则;S2.建立变速频率模型;S3.建立变道频率模型;S4.建立区间车道级交通量集计模型,统计预估不同道路区间、车道上的运行车辆数;S5.融合车道级交通量、变道频率指标、变速频率指标,建立区间车道级能耗评估模型;S6.求解区间车道级能耗评估模型的最佳运行路径、轨迹及车速方案。解决了现有技术中不能准确表达变化运行工况与机动操作对运行成本的影响,无法为车辆运行提供高精度节能运行轨迹及区间车速方案的技术问题。
Description
技术领域
本发明涉及一种电动汽车车道级运行方案规划方法,尤其涉及一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,属于交通运行方案规划技术领域。
背景技术
自动驾驶程序执行需要精确控制车辆加减速、变道、转向操作,由于油车在制动、转向等环节并没有完全实现精确的电控,目前自动驾驶行业研究主要集中于电动汽车控制及其续航里程,再生制动能量回收技术能在一定程度上延长电动汽车行驶里程,但还是难以满足车辆运行所需的能量需求。因此,在电池性能容量限制下,发挥自动驾驶车辆可感、可控、可反馈的技术优势,结合交通运行规划手段,合理配置与规划自动驾驶电动汽车的路权与能量资源,是降低自动驾驶电动汽车能量风险、保障道路交通运行秩序的可行途径之一。
《交通控制限号及能耗影响下的电动汽车路径规划研究》中提出了一种考虑纯电动汽车能耗的路径规划算法,该算法有效解决了车辆运行路径及全线运行车速的规划问题,但车辆在运行过程中需要适应实际运行工况的变化,频繁调整运行车速,该算法忽略了这一过程,求取车速往往面向路径全运行过程不变,无法量化变化运行环境与车速对车辆能耗产生的影响。只能求取路径而非运行轨迹,规划车速是面向路径不变而非适应不同运行工况自适应调整,因此,无法准确表达与量化运行过程中工况与机动操作对运行时间、运行能耗带来的影响。具体表现为以下两点:
1、忽略了运行工况的变化及车辆在横向车道空间与纵向路段区间转移等机动操作耗费的能量,不能准确表达变化运行工况与机动操作对运行成本的影响,无法为车辆运行提供精度跃升的节能运行轨迹。
2、既有规划方法能够向车辆提供运行车速方案,但求取车速通常面向路径全运行过程不变,与车辆实际运行规律不尽相符,无法为车辆运行提供精度跃升的区间车速方案,不利于准确预测车辆运行时间及能量消耗。
发明内容
在下文中给出了关于本发明的简要概述,以便提供关于本发明的某些方面的基本理解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
鉴于此,为解决现有技术中存在的技术问题,本发明提供一种低能耗的自动驾驶电动汽车车道级运行方案规划方法。
方案一、一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,包括以下步骤:
S1.将道路进行区间划分和车道线分割,确定车道编号规则;
S2.以区间车道为单元,新增变速频率指标,建立变速频率模型;
S3.以区间车道为单元,新增变道频率指标,建立变道频率模型;
S4.以区间车道为单元,建立区间车道级交通量集计模型,统计预估不同道路区间、车道上的运行车辆数;
S5.融合车道级交通量、变道频率指标、变速频率指标,建立区间车道级能耗评估模型;
S6.求解区间车道级能耗评估模型的最佳运行路径、轨迹及车速方案。
优选的,S1具体是:划分路段区间的方法是:将道路OD的有效路径j纵向分割n等分的道路区间,其中道路OD分别为车辆当前位置和目的地;
车道线分割的方法是:将道路空间进行横向等间距分割;
确定车道编号规则的方法是:道路区间序号为 ,车道序号为
,车道序号为 。
。
优选的,S2具体是:忽略车辆变速过程,设车辆变速由 区间进入
区间进入 区间时完成,则,车辆进入由
区间时完成,则,车辆进入由 区间进入
区间进入 区间的变速标识表达式为:
区间的变速标识表达式为:

其中, 为车辆在
为车辆在 路径
路径 区间
区间 车道上的运行车速,
车道上的运行车速, 为车辆
为车辆 路径在
路径在 区间
区间 车道上的运行车速;
车道上的运行车速;
车辆运行过程中,车辆变速次数的表达式为:

优选的,S3具体是:忽略车辆变道过程,设车辆变道由 区间进入
区间进入 区间时完成,则,车辆由
区间时完成,则,车辆由 路径
路径 区间的
区间的 车道进入
车道进入 路径
路径 区间的
区间的 车道的车辆变道标识数学表达为:
车道的车辆变道标识数学表达为:

其中, 为车辆在
为车辆在 路径
路径 区间的
区间的 车道运行轨迹,
车道运行轨迹, 为车辆在
为车辆在 路径
路径 区间的
区间的 车道运行轨迹;
车道运行轨迹;
车辆运行过程中,车辆变道次数的数学表达式为:

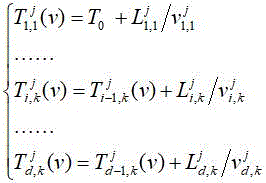
优选的,S4具体是:设当前时间为 、车辆当前处于路段第1区间1车道、目的路段区间为d,则车辆驶离
、车辆当前处于路段第1区间1车道、目的路段区间为d,则车辆驶离 区间的
区间的 车道的时间为:
车道的时间为:
其中, 、
、 、
、 分别为车辆在
分别为车辆在 路径起点第1区间1车道的驶离时间、行驶距离、行驶速度,
路径起点第1区间1车道的驶离时间、行驶距离、行驶速度, 、
、 、
、 分别为车辆在
分别为车辆在 路径
路径 区间
区间 车道的驶离时间、行驶距离、行驶速度,
车道的驶离时间、行驶距离、行驶速度, 、
、 、
、 分别为车辆在
分别为车辆在 路径终点第
路径终点第 区间
区间 车道的驶离时间、行驶距离、行驶速度,
车道的驶离时间、行驶距离、行驶速度, 分别为车辆在
分别为车辆在 路径第
路径第 区间
区间 车道的驶离时间,即车辆驶离i、d的前一区间的时间;
车道的驶离时间,即车辆驶离i、d的前一区间的时间;
则车辆运行在轨迹 的总行程时间为:
的总行程时间为:

令计量时间间隔为 ,车辆驶入、驶出路段区间
,车辆驶入、驶出路段区间 的时间间隔
的时间间隔 、
、 为:
为:

设车辆在 区间的
区间的 车道上行驶,当车辆变道标识
车道上行驶,当车辆变道标识 ,车辆由
,车辆由 区间驶入
区间驶入 区间不变道,保持原车道
区间不变道,保持原车道 行驶,第
行驶,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:
当变道标识 ,车辆向左变道,第
,车辆向左变道,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:

当变道标识 ,车辆向右变道,第
,车辆向右变道,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:

其中, 为
为 路径第
路径第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数,
车道上的车辆总数, 、
、 分别为第
分别为第 个时间间隔内
个时间间隔内 路径
路径 区间
区间 、
、 车道上的车辆总数,
车道上的车辆总数, 、
、 分别为第
分别为第 个时间间隔内
个时间间隔内 路径
路径 区间
区间 、
、 车道上的车辆总数。
车道上的车辆总数。
优选的,S5具体是:自动驾驶电动汽车的运行能耗与行驶路径、运行速度和运行路况有关,驱动力模型的一般式为:

其中, 为滚动阻力,
为滚动阻力, 为空气阻力,
为空气阻力, 坡度阻力,
坡度阻力, 加速阻力,
加速阻力, 为滚动阻力系数,
为滚动阻力系数, 为空气阻力系数,
为空气阻力系数, 为车速,
为车速, 为坡度角,
为坡度角, 为车辆,
为车辆, 为质量换算系数,
为质量换算系数, 为汽车质量;
为汽车质量; 为时间;
为时间;
其中,滚动阻力、空气阻力和加速阻力均与车速有关;
驱动力模型转化为:

其中, 为坡度角,由运行轨迹决定,
为坡度角,由运行轨迹决定, 为车辆在
为车辆在 路径
路径 区间
区间 车道上的运行车速;
车道上的运行车速;
车辆在 路径
路径 区间的
区间的 车道上消耗的能量为:
车道上消耗的能量为:

融合车道级车辆数、车辆变道频率、车辆变速频率因素,引入能耗综合修正系数,数学表达式为:

其中, 为起终点间有效路径的集合,
为起终点间有效路径的集合, 为车辆变速次数,
为车辆变速次数, 为车辆变道次数;
为车辆变道次数;
区间车道级能耗评估模型为:

其中, 分别为区间车道能够容纳的最大车辆数、电动汽车上路的最大、最小限速值。
分别为区间车道能够容纳的最大车辆数、电动汽车上路的最大、最小限速值。
优选的,S6具体是:模型输入为当前位置 、时间
、时间 及目的地
及目的地 ,模型输出为车道级出行路径
,模型输出为车道级出行路径 、轨迹
、轨迹 及区间运行车速
及区间运行车速 ,记为
,记为 ,模型为有约束多元非线性优化问题,采用遗传算法进行求解:
,模型为有约束多元非线性优化问题,采用遗传算法进行求解:
S61.自变量定义与初始化:根据当前位置 及目的地
及目的地 ,有效路径集合J利用A*算法求取,对有效运行路径进行枚举,设初始运行路径
,有效路径集合J利用A*算法求取,对有效运行路径进行枚举,设初始运行路径 ,运行车道为1号车道,
,运行车道为1号车道, 、区间运行车速取区间车道历史平均车速
、区间运行车速取区间车道历史平均车速 ;
;
S62.变量编码:s为编码精度系数,设s=4,变量 按以下规则编码:
按以下规则编码:

其中, 为自变量编码精度,
为自变量编码精度, 为自变量的最大值和最小值,其中
为自变量的最大值和最小值,其中 的最小值为1,最大值为道路车道数;针对高速公路,
的最小值为1,最大值为道路车道数;针对高速公路, 最小值取60,最大值取80;
最小值取60,最大值取80;
S63.适应度函数:适应度函数 ,
, 指运行方案的能耗上限;
指运行方案的能耗上限;
S64.收敛判断:选用平均相对误差作为收敛标准,若连续2次迭代结果的相对误差小于0.15,中止求解,否则继续求解。
方案二、一种电子设备,包括存储器和处理器,存储器存储有计算机程序,所述的处理器执行所述计算机程序时实现方案一所述一种低能耗的自动驾驶电动汽车车道级运行方案规划方法的步骤。
方案三、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现方案一所述一种低能耗的自动驾驶电动汽车车道级运行方案规划方法。
本发明的有益效果如下:
(1)克服传统路径规划方法精度不足的局限性,通过路段区间化及车道线分割,建立变速频率模型、变道频率模型和区间车道级交通量集计模型,还原车辆在横向车道空间与纵向路段区间机动转移的数学表达,提高建模精度。
(2)突破常规能耗指标框架,融合车道级路况、变道频率指标、变速频率指标,形成能耗综合修正系数,精准量化车辆在变化道路工况下运行的能量消耗,输出精细化节能运行轨迹与区间车速运行方案。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为一种低能耗的自动驾驶电动汽车车道级运行方案规划方法流程示意图;
图2为路段区间划分结果示意图。
具体实施方式
为了使本发明实施例中的技术方案及优点更加清楚明白,以下结合附图对本发明的示例性实施例进行进一步详细的说明,显然,所描述的实施例仅是本发明的一部分实施例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
实施例1、参照图1-图2说明本实施方式,一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,包括以下步骤:
S1.为准确量化车辆运行过程中不同工况下的能耗变化,通过路段区间化及车道线分割,将道路空间进行横向与纵向分割,具体是:将道路进行区间划分和车道线分割,确定车道编号规则;
划分路段区间的方法是:将道路OD的有效路径j纵向分割n等分的道路区间,其中道路OD分别为车辆当前位置和目的地;
车道线分割的方法是:将道路空间进行横向等间距分割;
确定车道编号规则的方法是:道路区间序号为 ,车道序号为k,参照图2;
,车道序号为k,参照图2;
S2.车速协同是反映车辆运行状态稳定与否的重要指标,车辆的能量消耗与运行车速成正比,车辆频繁变速的机动操作,也会增加车辆自身的能量消耗,为量化变速频率对能耗产生的影响,新增变速频率指标,建立变速频率量化模型,具体是:以区间车道为单元,新增变速频率指标,建立变速频率模型;
忽略车辆变速过程,设车辆变速由 区间进入
区间进入 区间时完成,则,车辆进入由
区间时完成,则,车辆进入由 区间进入
区间进入 区间的变速标识表达式为:
区间的变速标识表达式为:

其中, 为车辆在
为车辆在 路径
路径 区间
区间 车道上的运行车速,
车道上的运行车速, 为车辆
为车辆 路径在
路径在 区间
区间 车道上的运行车速;
车道上的运行车速;
车辆运行过程中,车辆变速次数的表达式为:

S3.车辆频繁变道的机动操作,也会增加车辆自身的能量消耗,扰乱交通秩序。为量化变道频率对能耗的折损,新增变道频率指标,建立变道频率量化模型,具体是:以区间车道为单元,新增变道频率指标,建立变道频率模型;
忽略车辆变道过程,设车辆变道由 区间进入
区间进入 区间时完成,则,车辆由
区间时完成,则,车辆由 路径
路径 区间的
区间的 车道进入
车道进入 路径
路径 区间的
区间的 车道的车辆变道标识数学表达为:
车道的车辆变道标识数学表达为:

其中, 为车辆在
为车辆在 路径
路径 区间的
区间的 车道运行轨迹,
车道运行轨迹, 为车辆在
为车辆在 路径
路径 区间的
区间的 车道运行轨迹;
车道运行轨迹;
车辆运行过程中,车辆变道次数的数学表达式为:

S4.以交通量作为评估路况的量化指标,假设所有自动驾驶电动汽车的运行方案会全量上传至管理与控制中心进行集计,根据管理机制,利用车辆上传的车速方案,建立区间车道级车辆数集计模型,统计预估不同道路区间、车道上的运行车辆数,具体是:以区间车道为单元,建立区间车道级交通量集计模型,统计预估不同道路区间、车道上的运行车辆数;
设当前时间为 、车辆当前处于路段第1区间1车道、目的路段区间为d,则车辆驶离
、车辆当前处于路段第1区间1车道、目的路段区间为d,则车辆驶离 区间的
区间的 车道的时间为:
车道的时间为:

其中, 、
、 、
、 分别为车辆在
分别为车辆在 路径起点第1区间1车道的驶离时间、行驶距离、行驶速度,
路径起点第1区间1车道的驶离时间、行驶距离、行驶速度, 、
、 、
、 分别为车辆在
分别为车辆在 路径
路径 区间
区间 车道的驶离时间、行驶距离、行驶速度,
车道的驶离时间、行驶距离、行驶速度, 、
、 、
、 分别为车辆在
分别为车辆在 路径终点第
路径终点第 区间
区间 车道的驶离时间、行驶距离、行驶速度,
车道的驶离时间、行驶距离、行驶速度, 分别为车辆在
分别为车辆在 路径第
路径第 区间
区间 车道的驶离时间;
车道的驶离时间;
则车辆运行在轨迹 的总行程时间为:
的总行程时间为:

令计量时间间隔为 ,车辆驶入、驶出路段区间
,车辆驶入、驶出路段区间 的时间间隔
的时间间隔 、
、 为:
为:

设车辆在 区间的
区间的 车道上行驶,当车辆变道标识
车道上行驶,当车辆变道标识 ,车辆由
,车辆由 区间驶入
区间驶入 区间不变道,保持原车道
区间不变道,保持原车道 行驶,第
行驶,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:

当变道标识 ,车辆向左变道,第
,车辆向左变道,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:

当变道标识 ,车辆向右变道,第
,车辆向右变道,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:

其中, 为
为 路径第
路径第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数,
车道上的车辆总数, 、
、 分别为第
分别为第 个时间间隔内
个时间间隔内 路径
路径 区间
区间 、
、 车道上的车辆总数,
车道上的车辆总数, 、
、 分别为第
分别为第 个时间间隔内
个时间间隔内 路径
路径 区间
区间 、
、 车道上的车辆总数。
车道上的车辆总数。
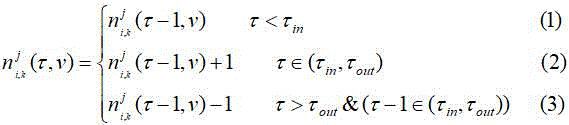
上述表达式(1)、(2)、(3)分别表示第 个时间间隔内车辆未驶达、驶至、驶离i路段L车道时更新区间车辆数的三种情况。
个时间间隔内车辆未驶达、驶至、驶离i路段L车道时更新区间车辆数的三种情况。
S5.融合车道级交通量、变道频率指标、变速频率指标,建立区间车道级能耗评估模型;
自动驾驶电动汽车的运行能耗与行驶路径、运行速度和运行路况(交通拥堵、道路坡度和自然天气)有关,驱动力模型的一般式为:

其中, 为滚动阻力,
为滚动阻力, 为空气阻力,
为空气阻力, 坡度阻力,
坡度阻力, 加速阻力,
加速阻力, 为滚动阻力系数,
为滚动阻力系数, 为空气阻力系数,
为空气阻力系数, 为车速,
为车速, 为车辆,
为车辆, 为质量换算系数,
为质量换算系数, 为汽车质量;
为汽车质量; 为时间;
为时间;
其中,滚动阻力、空气阻力和加速阻力均与车速有关;
驱动力模型可转化为:

其中, 为坡度角,由运行轨迹决定,
为坡度角,由运行轨迹决定, 为车辆在
为车辆在 路径
路径 区间
区间 车道上的运行车速;
车道上的运行车速;
车辆在 路径
路径 区间的
区间的 车道上消耗的能量为:
车道上消耗的能量为:

在车辆数越多的车道上行驶,车辆受其他车辆的干扰强度越高,车辆频繁变速、变道的可能性增加,频繁的机动操作与转换又会将进一步增加车辆能耗,为此,融合车道级车辆数、车辆变道频率、车辆变速频率因素,引入能耗综合修正系数,数学表达式为:

其中, 为起终点间有效路径的集合,
为起终点间有效路径的集合, 为车辆变速次数,
为车辆变速次数, 为车辆变道次数;
为车辆变道次数;
区间车道级能耗评估模型为:

其中, 分别为区间车道能够容纳的最大车辆数、电动汽车上路的最大、最小限速值。
分别为区间车道能够容纳的最大车辆数、电动汽车上路的最大、最小限速值。
S6.求解区间车道级能耗评估模型的最佳运行路径、轨迹及车速方案
模型输入为当前位置 、时间
、时间 及目的地
及目的地 ,模型输出为车道级出行路径
,模型输出为车道级出行路径 、轨迹
、轨迹 及区间运行车速
及区间运行车速 ,记为
,记为 ,模型为有约束多元非线性优化问题,采用遗传算法进行求解:
,模型为有约束多元非线性优化问题,采用遗传算法进行求解:
S61.自变量定义与初始化:根据当前位置 及目的地
及目的地 ,有效路径集合J利用A*算法求取,对有效运行路径进行枚举,设初始运行路径
,有效路径集合J利用A*算法求取,对有效运行路径进行枚举,设初始运行路径 ,运行车道为1号车道,
,运行车道为1号车道, 、区间运行车速取区间车道历史平均车速
、区间运行车速取区间车道历史平均车速 ;
;
S62.变量编码:s为编码精度系数,设s=4,变量 按以下规则编码:
按以下规则编码:

其中, 为自变量编码精度,
为自变量编码精度, 为自变量的最大值和最小值,其中
为自变量的最大值和最小值,其中 的最小值为1,最大值为道路车道数;针对高速公路,
的最小值为1,最大值为道路车道数;针对高速公路, 最小值取60,最大值取80;
最小值取60,最大值取80;
S63.适应度函数:适应度函数 ,
, 指运行方案的能耗上限;
指运行方案的能耗上限;
S64.收敛判断:选用平均相对误差作为收敛标准,若连续2次迭代结果的相对误差小于0.15,中止求解,否则继续求解。
本发明在自动驾驶电动汽车电池容量及性能限制背景下,通过区间车道级能耗模型,围绕节能目标,为车辆全运行周期提供路权、能量的统筹与规划服务,生成时空精细化的运行路径、运行轨迹及区间车速方案,有效降低自动驾驶电动汽车在运行过程中的能量风险。
实施例2、本发明的计算机装置可以是包括有处理器以及存储器等装置,例如包含中央处理器的单片机等。并且,处理器用于执行存储器中存储的计算机程序时实现上述的基于CREO软件的可修改由关系驱动的推荐数据的推荐方法的步骤。
所称处理器可以是中央处理单元(Central Processing Unit,CPU),还可以是其他通用处理器、数字信号处理器 (Digital Signal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现成可编程门阵列 (Field-Programmable Gate Array,FPGA) 或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
所述存储器可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序(比如声音播放功能、图像播放功能等)等;存储数据区可存储根据手机的使用所创建的数据(比如音频数据、电话本等)等。此外,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如硬盘、内存、插接式硬盘,智能存储卡(Smart Media Card, SMC),安全数字(Secure Digital, SD)卡,闪存卡(Flash Card)、至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。
实施例3、计算机可读存储介质实施例
本发明的计算机可读存储介质可以是被计算机装置的处理器所读取的任何形式的存储介质,包括但不限于非易失性存储器、易失性存储器、铁电存储器等,计算机可读存储介质上存储有计算机程序,当计算机装置的处理器读取并执行存储器中所存储的计算机程序时,可以实现上述的基于CREO软件的可修改由关系驱动的建模数据的建模方法的步骤。
所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读介质可以包括:能够携带所述计算机程序代码的任何实体或装置、记录介质、U盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器(ROM,Read-Only Memory)、随机存取存储器(RAM,Random Access Memory)、电载波信号、电信信号以及软件分发介质等。需要说明的是,所述计算机可读介质包含的内容可以根据司法管辖区内立法和专利实践的要求进行适当的增减,例如在某些司法管辖区,根据立法和专利实践,计算机可读介质不包括电载波信号和电信信号。
尽管根据有限数量的实施例描述了本发明,但是受益于上面的描述,本技术领域内的技术人员明白,在由此描述的本发明的范围内,可以设想其它实施例。此外,应当注意,本说明书中使用的语言主要是为了可读性和教导的目的而选择的,而不是为了解释或者限定本发明的主题而选择的。因此,在不偏离所附权利要求书的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。对于本发明的范围,对本发明所做的公开是说明性的,而非限制性的,本发明的范围由所附权利要求书限定。
Claims (9)
1.一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,其特征在于,包括以下步骤:
S1.将道路进行区间划分和车道线分割,确定车道编号规则;
S2.以区间车道为单元,新增变速频率指标,建立变速频率模型;
S3.以区间车道为单元,新增变道频率指标,建立变道频率模型;
S4.以区间车道为单元,建立区间车道级交通量集计模型,统计预估不同道路区间、车道上的运行车辆数;
S5.融合车道级交通量、变道频率指标、变速频率指标,建立区间车道级能耗评估模型;
S6.求解区间车道级能耗评估模型的最佳运行路径、轨迹及车速方案。
2.根据权利要求1所述的一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,其特征在于,S1具体是:划分路段区间的方法是:将道路OD的有效路径j纵向分割n等分的道路区间,其中道路OD分别为车辆当前位置和目的地;
车道线分割的方法是:将道路空间进行横向等间距分割;
确定车道编号规则的方法是:道路区间序号为 ,车道序号为
,车道序号为 。
。
3.根据权利要求2所述的一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,其特征在于,S2具体是:忽略车辆变速过程,设车辆变速由 区间进入
区间进入 区间时完成,则,车辆进入由
区间时完成,则,车辆进入由 区间进入
区间进入 区间的变速标识表达式为:
区间的变速标识表达式为:

其中, 为车辆在
为车辆在 路径
路径 区间
区间 车道上的运行车速,
车道上的运行车速, 为车辆
为车辆 路径在
路径在 区间
区间 车道上的运行车速;
车道上的运行车速;
车辆运行过程中,车辆变速次数的表达式为:

4.根据权利要求3所述的一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,其特征在于,S3具体是:忽略车辆变道过程,设车辆变道由 区间进入
区间进入 区间时完成,则,车辆由
区间时完成,则,车辆由 路径
路径 区间的
区间的 车道进入
车道进入 路径
路径 区间的
区间的 车道的车辆变道标识数学表达为:
车道的车辆变道标识数学表达为:

其中, 为车辆在
为车辆在 路径
路径 区间的
区间的 车道运行轨迹,
车道运行轨迹, 为车辆在
为车辆在 路径
路径 区间的
区间的 车道运行轨迹;
车道运行轨迹;
车辆运行过程中,车辆变道次数的数学表达式为:

5.根据权利要求4所述的一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,其特征在于,S4具体是:设当前时间为 、车辆当前处于路段第1区间1车道、目的路段区间为d,则车辆驶离
、车辆当前处于路段第1区间1车道、目的路段区间为d,则车辆驶离 区间的
区间的 车道的时间为:
车道的时间为:

其中, 、
、 、
、 分别为车辆在
分别为车辆在 路径起点第1区间1车道的驶离时间、行驶距离、行驶速度,
路径起点第1区间1车道的驶离时间、行驶距离、行驶速度, 、
、 、
、 分别为车辆在
分别为车辆在 路径
路径 区间
区间 车道的驶离时间、行驶距离、行驶速度,
车道的驶离时间、行驶距离、行驶速度, 、
、 、
、 分别为车辆在
分别为车辆在 路径终点第
路径终点第 区间
区间 车道的驶离时间、行驶距离、行驶速度,
车道的驶离时间、行驶距离、行驶速度, 分别为车辆在
分别为车辆在 路径第
路径第 区间
区间 车道的驶离时间;
车道的驶离时间;
则车辆运行在轨迹 的总行程时间为:
的总行程时间为:

令计量时间间隔为 ,车辆驶入、驶出路段区间
,车辆驶入、驶出路段区间 的时间间隔
的时间间隔 、
、 为:
为:

设车辆在 区间的
区间的 车道上行驶,当车辆变道标识
车道上行驶,当车辆变道标识 ,车辆由
,车辆由 区间驶入
区间驶入 区间不变道,保持原车道
区间不变道,保持原车道 行驶,第
行驶,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:

当变道标识 ,车辆向左变道,第
,车辆向左变道,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:

当变道标识 ,车辆向右变道,第
,车辆向右变道,第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数为:
车道上的车辆总数为:

其中, 为
为 路径第
路径第 个时间间隔内
个时间间隔内 区间
区间 车道上的车辆总数,
车道上的车辆总数, 、
、 分别为第
分别为第 个时间间隔内
个时间间隔内 路径
路径 区间
区间 、
、 车道上的车辆总数,
车道上的车辆总数, 、
、 分别为第
分别为第 个时间间隔内
个时间间隔内 路径
路径 区间
区间 、
、 车道上的车辆总数。
车道上的车辆总数。
6.根据权利要求5所述的一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,其特征在于,S5具体是:自动驾驶电动汽车的运行能耗与行驶路径、运行速度和运行路况有关,驱动力模型的一般式为:

其中, 为滚动阻力,
为滚动阻力, 为空气阻力,
为空气阻力, 坡度阻力,
坡度阻力, 加速阻力,
加速阻力, 为滚动阻力系数,
为滚动阻力系数, 为空气阻力系数,
为空气阻力系数, 为车速,
为车速, 为车辆,
为车辆, 为质量换算系数,
为质量换算系数, 为汽车质量;
为汽车质量; 为时间;
为时间;
其中,滚动阻力、空气阻力和加速阻力均与车速有关;
驱动力模型转化为:

其中, 为坡度角,由运行轨迹决定,
为坡度角,由运行轨迹决定, 为车辆在
为车辆在 路径
路径 区间
区间 车道上的运行车速;
车道上的运行车速;
车辆在 路径
路径 区间的
区间的 车道上消耗的能量为:
车道上消耗的能量为:

融合车道级车辆数、车辆变道频率、车辆变速频率因素,引入能耗综合修正系数,数学表达式为:

其中, 为起终点间有效路径的集合,
为起终点间有效路径的集合, 为车辆变速次数,
为车辆变速次数, 为车辆变道次数;
为车辆变道次数;
区间车道级能耗评估模型为:

其中, 分别为区间车道能够容纳的最大车辆数、电动汽车上路的最大、最小限速值。
分别为区间车道能够容纳的最大车辆数、电动汽车上路的最大、最小限速值。
7.根据权利要求6所述的一种低能耗的自动驾驶电动汽车车道级运行方案规划方法,其特征在于,S6具体是:模型输入为当前位置 、时间
、时间 及目的地
及目的地 ,模型输出为车道级出行路径
,模型输出为车道级出行路径 、轨迹
、轨迹 及区间运行车速
及区间运行车速 ,记为
,记为 ,模型为有约束多元非线性优化问题,采用遗传算法进行求解:
,模型为有约束多元非线性优化问题,采用遗传算法进行求解:
S61.自变量定义与初始化:根据当前位置 及目的地
及目的地 ,有效路径集合J利用A*算法求取,对有效运行路径进行枚举,设初始运行路径
,有效路径集合J利用A*算法求取,对有效运行路径进行枚举,设初始运行路径 ,运行车道为1号车道,
,运行车道为1号车道, 、区间运行车速取区间车道历史平均车速
、区间运行车速取区间车道历史平均车速 ;
;
S62.变量编码:s为编码精度系数,设s=4,变量 按以下规则编码:
按以下规则编码:

其中, 为自变量编码精度,
为自变量编码精度, 为自变量的最大值和最小值,其中
为自变量的最大值和最小值,其中 的最小值为1,最大值为道路车道数;针对高速公路,
的最小值为1,最大值为道路车道数;针对高速公路, 最小值取60,最大值取80;
最小值取60,最大值取80;
S63.适应度函数:适应度函数 ,
, 指运行方案的能耗上限;
指运行方案的能耗上限;
S64.收敛判断:选用平均相对误差作为收敛标准,若连续2次迭代结果的相对误差小于0.15,中止求解,否则继续求解。
8.一种电子设备,其特征在于,包括存储器和处理器,存储器存储有计算机程序,所述的处理器执行所述计算机程序时实现权利要求1-7任一项所述的一种低能耗的自动驾驶电动汽车车道级运行方案规划方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-7任一项所述的一种低能耗的自动驾驶电动汽车车道级运行方案规划方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211354086.9A CN115402358B (zh) | 2022-11-01 | 2022-11-01 | 一种低能耗的自动驾驶电动汽车车道级运行方案规划方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211354086.9A CN115402358B (zh) | 2022-11-01 | 2022-11-01 | 一种低能耗的自动驾驶电动汽车车道级运行方案规划方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115402358A true CN115402358A (zh) | 2022-11-29 |
| CN115402358B CN115402358B (zh) | 2023-04-07 |
Family
ID=84167657
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211354086.9A Active CN115402358B (zh) | 2022-11-01 | 2022-11-01 | 一种低能耗的自动驾驶电动汽车车道级运行方案规划方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115402358B (zh) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109857104A (zh) * | 2019-01-25 | 2019-06-07 | 北京交通大学 | 一种基于公路虚拟轨道化的无人驾驶技术 |
| CN113593228A (zh) * | 2021-07-26 | 2021-11-02 | 广东工业大学 | 一种高速公路瓶颈区域自动驾驶协同控制方法 |
| CN114993335A (zh) * | 2022-06-30 | 2022-09-02 | 重庆长安汽车股份有限公司 | 一种自动驾驶路径规划方法、装置、电子设备及存储介质 |
-
2022
- 2022-11-01 CN CN202211354086.9A patent/CN115402358B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109857104A (zh) * | 2019-01-25 | 2019-06-07 | 北京交通大学 | 一种基于公路虚拟轨道化的无人驾驶技术 |
| CN113593228A (zh) * | 2021-07-26 | 2021-11-02 | 广东工业大学 | 一种高速公路瓶颈区域自动驾驶协同控制方法 |
| CN114993335A (zh) * | 2022-06-30 | 2022-09-02 | 重庆长安汽车股份有限公司 | 一种自动驾驶路径规划方法、装置、电子设备及存储介质 |
Non-Patent Citations (1)
| Title |
|---|
| 马建等: "中国交通工程学术研究综述?2016", 《中国公路学报》 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115402358B (zh) | 2023-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111768637B (zh) | 一种信号交叉口交通信号灯和车辆轨迹控制方法 | |
| CN109733378B (zh) | 一种线下优化线上预测的转矩分配方法 | |
| CN114937366B (zh) | 一种基于多尺度交通需求与供给转化的交通流推算方法 | |
| US20230264578A1 (en) | Method for predicting energy consumption-recovery ratio of new energy vehicle, and energy saving control method and system for new energy vehicle | |
| CN113044064A (zh) | 基于元强化学习的车辆自适应的自动驾驶决策方法及系统 | |
| KR102671687B1 (ko) | 차량의 주행 가능 거리를 추정하기 위한 방법 및 장치 | |
| CN115062202A (zh) | 驾驶行为意图及轨迹的预测方法、装置、设备及存储介质 | |
| CN115402358B (zh) | 一种低能耗的自动驾驶电动汽车车道级运行方案规划方法 | |
| Zhang et al. | Dynamic control cycle speed limit strategy for improving traffic operation at freeway bottlenecks | |
| CN113753082B (zh) | 无人车轨迹更新方法及装置、控制方法及电子设备 | |
| CN113479187A (zh) | 一种插电式混合动力汽车分层异步长能量管理方法 | |
| Zhang et al. | Stability and safety analysis of mixed traffic flow considering network function degradation and platoon driving on the road with a slope | |
| CN115713860B (zh) | 一种基于强化学习的高速公路交通管控方法 | |
| CN117612365A (zh) | 一种高速公路车道可汇入容量精细化估计方法、系统、设备及介质 | |
| CN102221385A (zh) | 燃料消耗的确定方法及导航系统 | |
| CN112669609A (zh) | 基于大数据和边缘计算的数据处理方法及大数据服务器 | |
| CN113902209A (zh) | 出行路线推荐方法、边缘服务器、云服务器、设备及介质 | |
| CN106530689B (zh) | 一种基于遗传算法和行驶数据的公交车到站时间实时预估方法 | |
| CN118025225B (zh) | 考虑周车运动预测偏差的高效生态驾驶轨迹跟踪控制方法 | |
| KR102346506B1 (ko) | 강화학습 기반의 교통 신호 시간 제어 방법 및 장치 | |
| RU2765268C1 (ru) | Устройство формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по автомагистрали | |
| CN115762200B (zh) | 车路协同环境下信号交叉口车道功能动态优化方法及系统 | |
| RU2764741C1 (ru) | Система формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по автомагистрали | |
| CN118070683B (zh) | 基于数字孪生的物流运输大数据采集方法及系统 | |
| CN117537836B (zh) | 一种考虑实时事故风险的导航路径优化方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |