CN114834622A - Ship diesel-electric hybrid power propulsion system based on fuzzy control - Google Patents
Ship diesel-electric hybrid power propulsion system based on fuzzy control Download PDFInfo
- Publication number
- CN114834622A CN114834622A CN202210593221.9A CN202210593221A CN114834622A CN 114834622 A CN114834622 A CN 114834622A CN 202210593221 A CN202210593221 A CN 202210593221A CN 114834622 A CN114834622 A CN 114834622A
- Authority
- CN
- China
- Prior art keywords
- diesel engine
- power
- ship
- motor
- diesel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000001360 synchronised effect Effects 0.000 claims abstract description 29
- 230000005540 biological transmission Effects 0.000 claims abstract description 14
- 238000013139 quantization Methods 0.000 claims description 16
- 238000000034 method Methods 0.000 claims description 15
- 230000005611 electricity Effects 0.000 claims description 6
- 230000005284 excitation Effects 0.000 claims description 5
- 238000013178 mathematical model Methods 0.000 claims description 4
- 238000010521 absorption reaction Methods 0.000 claims description 2
- 238000013461 design Methods 0.000 abstract description 7
- 238000011161 development Methods 0.000 abstract description 7
- 230000006870 function Effects 0.000 description 21
- 239000000446 fuel Substances 0.000 description 15
- 230000008569 process Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 238000004088 simulation Methods 0.000 description 4
- 230000006872 improvement Effects 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000033228 biological regulation Effects 0.000 description 2
- 239000002283 diesel fuel Substances 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000003344 environmental pollutant Substances 0.000 description 2
- 238000003912 environmental pollution Methods 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000000059 patterning Methods 0.000 description 2
- 231100000719 pollutant Toxicity 0.000 description 2
- 241000282414 Homo sapiens Species 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000013473 artificial intelligence Methods 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000011217 control strategy Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000004146 energy storage Methods 0.000 description 1
- 238000009472 formulation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 239000003209 petroleum derivative Substances 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/20—Use of propulsion power plant or units on vessels the vessels being powered by combinations of different types of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/21—Control means for engine or transmission, specially adapted for use on marine vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/20—Use of propulsion power plant or units on vessels the vessels being powered by combinations of different types of propulsion units
- B63H2021/202—Use of propulsion power plant or units on vessels the vessels being powered by combinations of different types of propulsion units of hybrid electric type
- B63H2021/205—Use of propulsion power plant or units on vessels the vessels being powered by combinations of different types of propulsion units of hybrid electric type the second power unit being of the internal combustion engine type, or the like, e.g. a Diesel engine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/21—Control means for engine or transmission, specially adapted for use on marine vessels
- B63H2021/216—Control means for engine or transmission, specially adapted for use on marine vessels using electric control means
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T70/00—Maritime or waterways transport
- Y02T70/50—Measures to reduce greenhouse gas emissions related to the propulsion system
- Y02T70/5218—Less carbon-intensive fuels, e.g. natural gas, biofuels
- Y02T70/5236—Renewable or hybrid-electric solutions
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
The invention discloses a ship diesel-electric hybrid power propulsion system based on fuzzy control, which effectively combines diesel power and motor power according to the characteristics of the propulsion and electric propulsion of a ship diesel engine, performs coordinated distribution of the diesel power and the motor power according to a characteristic curve of the diesel engine through a designed fuzzy controller, and transmits the power to a propeller through a transmission device comprising a clutch, a gear box and a transmission shafting so as to push a ship to sail. The diesel-electric hybrid power ship propulsion system comprises a low-speed diesel engine, a three-phase permanent magnet synchronous motor, a clutch, a gear box, a transmission shafting and a controllable pitch propeller, and the optimal working point of the diesel engine is analyzed in a workbench according to the load characteristic curve of the diesel engine, so that the optimal output power of the diesel engine of the ship under different working conditions is analyzed. The invention is helpful for the development of the design of the propulsion system of the diesel-electric hybrid power ship.
Description
Technical Field
The invention belongs to the field of ship diesel-electric hybrid propulsion control, and particularly relates to a ship diesel-electric hybrid propulsion system based on fuzzy control.
Background
The 21 st century is a century with concurrent challenges and opportunities, wherein energy and environment are the most serious problems facing human beings, the reserve of energy resources is limited, the crisis of resource exhaustion is gradually approached, the environmental pollution is gradually worsened, the economic development is seriously influenced, and the problems are also difficult to be solved by the ship operation industry. The ship power propulsion system is the part which has the largest energy consumption ratio and the largest pollution emission ratio in the ship operation industry. The traditional ship power propulsion system takes a diesel engine as main power, petroleum products are main fuels of the ship diesel engine, and meanwhile, the emission of the diesel engine is also an important pollution source for polluting the atmosphere.
The marine diesel engine generally uses the low-speed diesel engine, because diesel oil is difficult for reasons such as volatilizing and compression ignition, the diesel engine cold start performance is relatively poor, even there is the start preheating device, just can start after preheating certain time. The diesel engine power has low thermal efficiency in certain working regions due to high power density, and further development of the diesel engine power is limited due to emission of a large amount of pollutants. With the continuous soundness of relevant policy and regulations, the pollutant emission generated by the diesel engine becomes a problem which must be considered in the integrated design of the power system of the ship. To meet the requirements of policy and regulation, the usage rate of the diesel engine in the design of the ship propulsion system should be further reduced. The green ship standard issued by the China classification society takes low noise as a part of green ships to improve the working and living conditions of crews and reduce the labor intensity. The marine diesel engine is not in line with the development trend of good working environment of the ship due to the defect of high noise. The single-engine propulsion system of the traditional marine diesel engine is too simple in structure, poor in working characteristics in various sea conditions, not in line with the development trend of system modularization and integration, and has a single and limited working mode to be improved urgently under the rapid development of technologies such as artificial intelligence and automatic control.
In order to realize zero pollution and zero oil consumption in the ship sailing process, one measure is to adopt a ship electric propulsion system, but due to the influence of a power generation mode, power density and an energy storage technology, most pure electric ships have the problems of low speed, acceleration and self-control performance at the present stage, and the cruising ability of the pure electric ships is easily restricted by battery capacity. Considering that a marine diesel engine propulsion system and a marine electric propulsion system have advantages and disadvantages respectively, the diesel-electric hybrid propulsion system can fully utilize the advantages of high energy density and powerful power of the diesel engine, simultaneously considers the characteristics of no pollution and zero emission of electric propulsion, ensures that the diesel engine always operates in a higher efficiency range under certain specific working conditions, improves the utilization rate of fuel, and simultaneously greatly reduces the emission of harmful gas.
Disclosure of Invention
The invention aims to provide a fuzzy control-based ship diesel-electric hybrid propulsion system.
The purpose of the invention is realized by the following technical scheme:
a ship diesel-electric hybrid power propulsion system based on fuzzy control comprises a diesel engine, a motor, a fuzzy controller, an electromagnetic clutch, a gear box, a transmission shafting, a propeller, a DC/DC converter and a storage battery; the diesel engine and the three-phase permanent magnet synchronous motor are connected to two input shafts of the gear box in a parallel connection mode, different clutches 1 and 2 are simultaneously arranged on output shafts of the diesel engine and the motor, and the on-off states of the clutches are different under different working modes; a DC/DC inverter is arranged on the side of the three-phase permanent magnet synchronous motor; when the three-phase permanent magnet synchronous motor is used as a shaft generator to generate electricity, the electric energy at the side of the three-phase permanent magnet synchronous motor is integrated, the generated electricity is transferred to a storage battery, and the storage battery is charged; when the three-phase permanent magnet synchronous motor is used as a motor, the motor is directly driven by the storage battery, and the DC/DC inverter does not work at the moment; the working modes of the diesel-electric hybrid power ship performed by the fuzzy controller are as follows:
step 1: using the input signal SOC of the storage battery by a quantization factor K 1 Fuzzification and ship operation required power T n Using a quantization factor K 2 Firstly, fuzzification is carried out, which subset of fuzzy subsets { XS, S, PS, M, PB, B, XB } the residual electric quantity SOC of the storage battery after the fuzzification is determined according to the fuzzified value, and power T required by running of the ship after the fuzzification is determined n Finding out the position of the fuzzified input in the membership function curve of the fuzzy subset { XS, S, PS, M, PB, B, XB };
step 2: using fuzzy control reasoning relation, if A and B then C, according to the established fuzzy rule control table, obtaining the current diesel engine output torque T e The fuzzy subset is one of { XS, S, PS, MS, M, MB, PB, B, XB }; wherein S represents minimum, S represents small, PS represents small, MS represents medium or small, M represents medium, MB represents medium or large, PB represents large, B represents large, and XB represents maximum;
and step 3: using a weighted average method based on a fuzzy subset of the output diesel engine output torque Judging the gear of the output torque of the diesel engine, and then utilizing a quantization factor K 3 ,
Judging the gear of the output torque of the diesel engine, and then utilizing a quantization factor K 3 , Converting the gear of the output torque of the diesel engine into the real output power of the diesel engine;
Converting the gear of the output torque of the diesel engine into the real output power of the diesel engine;
and 4, step 4: according to a mathematical model of the diesel-electric hybrid power system, the output power of the diesel engine is converted into a diesel engine throttle control signal and a control signal of the excitation voltage of the motor, the output of the diesel engine and the motor are controlled, and a working mode is selected, wherein the output power of the motor is obtained by the difference between the power required by the operation of the ship and the output power of the diesel engine.
Further, when the electric quantity of the storage battery is not sufficient and the power required by the operation of the ship at the propeller end is large, the output power of the diesel engine provides the power required by the operation of all the ships, and the diesel engine is used as the propulsion power to operate at a working point; the clutch 1 is controlled to be in an engaging state, the three-phase permanent magnet synchronous motor does not work, the corresponding clutch 2 is in a disconnecting state, the DC/DC inverter is in a non-working state, and the residual electric quantity of the battery is not changed.
Further, when the electric quantity of the storage battery is sufficient and the power required by the operation of the ship at the propeller end is small, the output power of the diesel engine is almost 0, and the motor provides the power required by the operation of the ship to push the ship to sail; the three-phase permanent magnet synchronous motor is in a working motor working state, the output power is given by the difference between the power required by the operation of the ship and the output power of the diesel engine, the storage battery directly supplies electric energy to the motor, the DC/DC inverter does not work, the clutch 2 is in a connection state, the diesel engine does not work, and the clutch 1 is in a disconnection state.
Furthermore, when the electric quantity of the storage battery is not sufficient and the power required by the operation of the ship at the propeller end is small, the output power of the diesel engine can meet the requirement of the navigation of the ship, and meanwhile, the surplus power can be used for driving the motor to charge the storage battery; the three-phase permanent magnet synchronous motor is in a generator working state, the absorption power is given by the difference between the power required by the running of the ship and the output power of the diesel engine, the clutch 1 and the clutch 2 are all in a joint state, one part of the output power of the diesel engine is sent to the propeller through the clutch 1 and the gear box, and the other part of the output power of the diesel engine is sent to the shaft generator through the clutch 1, the gear box and the clutch 2; at the moment, the DC/DC inverter works, and the generated energy of the shaft generator is integrated and then is sent to the storage battery to charge the storage battery.
Further, when the electric quantity of the storage battery is sufficient and the power required by the operation of the ship is extremely high, the output power of the diesel engine is close to the optimal working condition point, the power required by the operation of the ship cannot be provided completely, and the residual power is provided by the motor; the three-phase permanent magnet synchronous motor is in a motor working state, the output power is given by the difference between the power required by the running of the ship and the output power of the diesel engine, the clutch 1 and the clutch 2 are both in a joint state, the storage battery directly supplies electric energy to the motor, and the DC/DC inverter does not work.
The invention has the beneficial effects that:
according to the characteristics of propulsion and electric propulsion of a marine diesel engine, the power of a diesel engine and the power of a motor are effectively combined, the power of the diesel engine and the power of the motor are coordinated and distributed according to a characteristic curve of the diesel engine through a designed fuzzy controller, and are transmitted to a propeller through a transmission device comprising a clutch, a gear box and a transmission shafting, so that the marine is pushed to sail. The propulsion system of the diesel-electric hybrid power ship comprises a low-speed diesel engine, a three-phase permanent magnet synchronous motor, a clutch, a gear box, a transmission shafting and a controllable pitch propeller, and the optimal working point of the diesel engine is analyzed in a workbench according to the load characteristic curve of the diesel engine, so that the optimal output power of the diesel engine under different working conditions of the ship is analyzed. The invention explains the installation type of the diesel engine and the motor of the diesel-electric hybrid power ship and the whole system framework in detail, explains the control method of the diesel engine and the motor for coordinated distribution of power, and is beneficial to the development of the design of the diesel-electric hybrid power ship propulsion system.
The fuzzy control of the invention ensures that the response speed and the stability of the system in the switching process are considered according to the fuzzy logic rule in the switching process of the system working mode, thereby avoiding adverse factors caused by power fluctuation in the switching process of the system and improving the stability of the system.
In the establishment of the fuzzy membership function, the Gaussian membership function curve is used for the residual electric quantity of the storage battery and the total torque required by the running of the ship, so that the improvement of the resolution and the response speed of a ship hybrid power system is greatly facilitated, the poor stability of a control system can be avoided, the triangular membership function curve is used for the output torque of a diesel engine output by the system, and the system precision can be greatly improved.
The invention can fully utilize the characteristics of the diesel engine and the motor to realize the reduction of the installation power of the main diesel engine; the redundancy of the propulsion device is improved to a certain extent; the propulsion efficiency of the power propulsion system is improved; the fuel consumption of the diesel engine is reduced; the fuel utilization rate is improved; the carbon dioxide emission in the ship advancing process is reduced, so that the aim of reducing environmental pollution is fulfilled.
Drawings
FIG. 1 is a marine diesel-electric hybrid propulsion system based on fuzzy control according to the present invention;
FIG. 2 is a graph of the load characteristics of a diesel engine of the present invention;
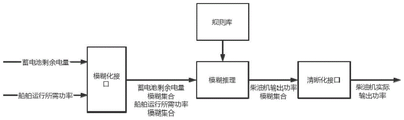
FIG. 3 is a basic block diagram of the fuzzy controller of the present invention;
FIG. 4 is a graph of membership function of the remaining battery capacity of the present invention;
FIG. 5 is a graph of the total demand torque membership function for the operation of the vessel of the present invention;
FIG. 6 is a graph of a membership function for output torque of a diesel engine according to the present invention;
FIG. 7 is a fuzzy control rule surface diagram of the present invention;
FIG. 8 is a diesel-electric hybrid simulation model of a fuzzy control-based ship;
FIG. 9 is a graph showing the universal characteristic of the diesel engine of the present invention;
FIG. 10 is a diesel engine mode of the present invention;
FIG. 11 is a motor mode of the present invention;
FIG. 12 is a shaft generator mode of the present invention;
fig. 13 shows a hybrid mode of the present invention.
Detailed Description
The invention is further described below with reference to the accompanying drawings.
The ship diesel-electric hybrid propulsion system based on fuzzy control is realized by the following technical scheme:
the diesel-electric hybrid propulsion system of the ship is shown in figure 1, a diesel engine and a three-phase permanent magnet synchronous motor are connected to two input shafts of a gear box in a parallel connection mode, different clutches 1 and 2 are simultaneously arranged on output shafts of the diesel engine and an electric motor, and the on-off states of the clutches are different under different working modes. Meanwhile, a DC/DC inverter is arranged on the side of the three-phase permanent magnet synchronous motor, when the three-phase permanent magnet synchronous motor is used as a shaft generator to generate electricity, the electric energy on the side of the three-phase permanent magnet synchronous motor can be effectively integrated, the generated electricity can be transmitted to a storage battery, and the storage battery is charged. When the three-phase permanent magnet synchronous motor is used as a motor, the motor is directly driven by the storage battery, and the DC/DC inverter does not work at the moment.
A diesel-electric hybrid coordinated distribution control strategy based on fuzzy control comprises the following steps:
step 1: the characteristic curve of the diesel engine is analyzed, as shown in fig. 2, the characteristic curve of the diesel engine enables the inherent characteristic of the diesel engine to be unchanged along with the change of external conditions, and the change of related parameters is measured through experiments. In the experiment, the fuel injection pump adjusting mechanism of the diesel engine is fixed, the rotating speed of the diesel engine is changed by changing the load of the diesel engine, and the rule that the main performance index and the working parameter of the diesel engine change along with the rotating speed is measured under the condition.
As can be seen from the graph in fig. 2, when the diesel engine starts to operate in the state of the rotation speed n1, the power of the diesel engine is low, the fuel consumption rate is very high, and the torque is low, so that before the rotation speed reaches n1, under the condition that the remaining battery power is sufficient, the shaft motor is used as the motor to complete the operations of system start or short-term low-speed sailing according to the characteristics of the shaft motor that the starting response is quick, the power consumption is low, and the like in the low-speed region, and at this time, the system operates in the motor mode that the shaft motor propels alone.
As the load increases, the rotational speed increases, the torque of the diesel engine increases, the specific fuel consumption decreases, and the output torque of the diesel engine reaches a maximum at the rotational speed n2, at which the diesel engine operates in a state where the specific fuel consumption is relatively small and has a good output power, which is generally defined as an optimum operating point. And then, the output torque of the diesel engine is reduced by a small amplitude when the rotating speed is continuously increased, and the fuel consumption rate reaches the lowest value at the position of n3, so that when the torque and the power required by the ship for sailing are within the range provided by the diesel engine, the diesel engine is required to work near the optimal working point, the system is propelled by the diesel engine alone, the abundant power of the diesel engine is provided for the shaft-mounted motor, the storage battery is charged, and the shaft-mounted motor is in a generator state.
When the rotating speed reaches n4, the power output and the fuel consumption rate of the diesel engine reach higher values, the output torque is reduced to a certain extent, and after the rotating speed exceeds n4 state, the working state of the diesel engine is poor, so after the rotating speed reaches n4 and the diesel engine cannot meet the torque required by ship navigation, the diesel engine should change state and be in a proper constant power state, and the insufficient power required by the system should be assisted and propelled by the motor through the shaft-driven motor.
Therefore, the required torque of the ship is used as one input set of fuzzy control to different degrees, the residual capacity of the battery is used as the other input set, and under different ship speed requirements, the input is fuzzified and subjected to fuzzy reasoning to further control the working mode of the system.
Step 2: building fuzzy controller structure
The fuzzy controller design of the ship hybrid power propulsion energy-saving control system mainly comprises the following steps: selecting input and output variables, fuzzifying the input and output variables, defining a fuzzy membership function and formulating a fuzzy rule. The basic structure of the fuzzy controller is shown in fig. 3, and it can be seen from the structural diagram that the fuzzy controller generally consists of four parts, which are: fuzzification interface: converting the actual discourse domain of the input and the output of the system into a fuzzy set which accords with the input of the system; a rule base: converting the qualitative relation between the input and the output of the system into a control rule through some experiences so as to carry out fuzzy reasoning in the following; fuzzy reasoning: reasoning the relation among all input and output fuzzy sets of the whole system according to the formulated fuzzy control rule; clearing the interface: and the fuzzy set of the input and the output of the fuzzy controller is clarified to obtain the exact input and output values of the system.
And step 3: input output variable fuzzification
Converting the basic discourse domain of the input and output variables into a fuzzy set, wherein the basic discourse domain is [ u ] min ,u max ]The fuzzy set obtained by fuzzifying the image is [ u' min ,u' max ]Then, linear transformation is used:

setting the residual electric quantity of the storage battery as SOC and the total required torque of the ship operation as T n Diesel engine outputOutput torque is T e . For the remaining capacity of the battery, the actual variation range is discussed as [0, SOC ] max ]Wherein SOC is max Representing the capacity of the accumulator, whose parameters are scaled by a quantization factor K in order to be graded in the fuzzy controller 1 Quantization is performed to set its fuzzy set to [0, 1%]Wherein 0 represents that the residual capacity of the storage battery is 0, 0.5 represents that the residual capacity of the storage battery is medium, 1 represents that the storage battery is sufficient, and other electric quantity grades are linearly distributed in an interval.
Similarly, for the total torque demand for the ship to operate, the actual variation range should be [0, T nmax ]Wherein T is nmax Representing the maximum value of the total required torque for the operation of the ship, and passing a quantization factor K through the parameters of the maximum value in order to grade the maximum value in the fuzzy controller 2 Quantization is performed to set its fuzzy set to [0, 1%]Wherein 0 represents that the torque is 0,1 represents that the total required torque of the ship operation is maximum, and the rest torque grades are linearly distributed in the interval.
For the output of the fuzzy controller: the actual variation range of the output torque of the diesel engine should be [0, T ] emax ]Wherein T is emax Representing the maximum value of the output torque of the diesel engine, and similarly, for the purpose of grading it in the fuzzy controller, the parameters thereof are passed through a quantization factor K 3 Quantization is performed to set its fuzzy set to [0,1]Wherein 0 represents the torque of 0, 0.5 represents the optimal torque of the diesel engine, the value is determined by the speed characteristic and the load characteristic of the diesel engine, 1 represents the maximum torque which can be output by the diesel engine, and the rest torque grades are linearly distributed in the interval.
And 4, step 4: fuzzy set membership function:
the membership function is constructed by selecting an expert experience method, the influence of the curve shape and distribution of the ship hybrid power energy-saving control system and the membership function on the control system is comprehensively analyzed, the fact that a Gaussian membership function curve is used for the residual electric quantity of a storage battery and the total required torque of ship operation is summarized, the improvement of the resolution and the response speed of the ship hybrid power system is greatly facilitated, the problem that the stability of the control system is too poor can be solved, a triangular membership function curve is used for the output torque of a diesel engine of a system, and the accuracy of the system can be greatly improved.
The membership function curve of the input and output fuzzy set established by Matlab is as follows, FIG. 4 is the membership function curve of the residual capacity of the storage battery, FIG. 5 is the total required torque membership function curve of the ship operation, and FIG. 6 is the output torque membership function curve of the diesel engine. In fig. 4, 5, and 6, XS indicates minimum, S indicates small, PS indicates small, MS indicates medium, M indicates medium, MB indicates medium, PB indicates large, B indicates large, and XB indicates maximum.
And 5: fuzzy control rule formulation
The ship hybrid power energy-saving propulsion control system generates control rules according to the fuzzy model of the process, and pays attention to the reasonability, consistency and completeness of the number of the rules during design. The design of the fuzzy control rule of the hybrid ship is mainly formulated according to the following basis:
(1) when the residual electric quantity of the storage battery is insufficient, the output torque of the diesel engine is higher than the total required torque of the ship in operation, surplus power generated when the diesel engine operates is transmitted to the shaft generator, and the shaft generator generates power to supply power to the storage battery and a ship power grid.
(2) When the residual charge of the storage battery is sufficient, the output torque of the diesel engine is enough to provide the total required torque for the operation of the ship, and in this case, the diesel engine is enabled to work in a higher efficiency area, namely, a diesel engine operation mode.
(3) When the remaining battery capacity is sufficient, the diesel engine should be operated near the optimum operating point, and the difference between the total required torque for the ship to operate and the output torque of the diesel engine is compensated by the electric motor.
(4) When the residual electric quantity of the storage battery is high, the diesel engine is used as the main power, and the electric motor is used as the auxiliary power to carry out hybrid propulsion.
(5) No matter what mode is used for propulsion, in order to reduce the fuel consumption and improve the fuel utilization rate, the output torque of the diesel engine is within the optimal torque, and the failure of the diesel engine can be caused when the torque exceeds the optimal torque.
According to the principle, the input and output fuzzy sets are graded, the residual capacity of the storage battery and the total required torque for the operation of the ship are graded into 7 grades, namely 7 fuzzy subsets, and the output torque of the diesel engine is graded into 9 grades, namely 9 fuzzy subsets.
The fuzzy set of the residual charge SOC of the storage battery comprises 7 fuzzy subsets: { XS, S, PS, M, PB, B, XB }, total requested torque T for ship operation n Contains 7 fuzzy subsets: { XS, S, PS, M, PB, B, XB }, diesel output torque T e Contains 9 fuzzy subsets: { XS, S, PS, MS, M, MB, PB, B, XB }, where XS denotes tiny, S denotes small, PS denotes small, MS denotes medium, M denotes medium, MB denotes medium, PB denotes large, B denotes large, and XB denotes maximum. Based on the above analysis, fuzzy control rules are formulated, see table 1.

TABLE 1
The fuzzy inference statement of the problem is that if A and B then C uses a zadah method to perform fuzzy inference on a fuzzy rule, and a known optimal output power of the diesel engine is obtained according to a known battery residual capacity and the required power for running a ship and experience, namely a fuzzy relation R is determined. According to the fuzzy control rule table 1, a Matlab patterning tool is applied to the fuzzy control rule table to perform fuzzy rule patterning, as shown in FIG. 7: the fuzzy regular graphical curved surface shows that when the residual electric quantity of the storage battery is sufficient, the output torque of the diesel engine is small, the ship is pushed to sail by using the motor as auxiliary power, the dependence degree of the ship operation on the diesel engine is reduced, the propelling pressure of the diesel engine in the ship operation process can be effectively reduced, the fuel consumption rate is reduced, and energy-saving propulsion is realized. When the electric quantity of the storage battery is insufficient, the diesel engine is used as main power to propel, the ship can be well pushed to sail, the output torque of the diesel engine is always in the range of the optimal torque, and the operation efficiency and the fuel utilization rate of the diesel engine can be well improved.
Step 6: fuzzy control output sharpening
After the fuzzy rule is judged in the step 5, the fuzzy controller outputs a fuzzy quantity which is the output torque T of the diesel engine e Cannot be directly used to control the actuator, a subset of the fuzzy set { XS, S, PS, MS, M, MB, PB, B, XB } is used to decide the fuzzy control outcome using a weighted average method:

wherein xi represents the discrete point in the fuzzy subset, ki represents the weight corresponding to the discrete point, and the intermediate value of each fuzzy subset is taken. The obtained result of the judgment is the gear number T 'of the output power of the diesel engine' e ,T′ e Has a variation range of [ T' e,min ,T' e,max ]And does not represent the actual output power of the diesel engine, the linear transformation is continuously carried out on the diesel engine, and the quantization factor K is still used 3 The variation range of the actual control amount is [0, T ] emax ]The transformation of (2):

and 7: mathematical model establishment for diesel-electric hybrid power system
And modeling the ship hybrid power system, and combining the diesel engine module simulation model, the motor module simulation model, the fuzzy controller module simulation model and the gear transmission model. The torque required by ship navigation and the residual battery capacity are used as input signals of the fuzzy controller, the torque required by diesel engine navigation is output, control signals of the opening degree of an accelerator of the diesel engine and the excitation voltage of the motor are further obtained through the load characteristics of the diesel engine, and a diesel-electric hybrid power system is modeled as shown in fig. 8.
The relation between the fuel injection quantity and the torque of the diesel engine is shown in the following figure 9, and the relation between the output torque of the diesel engine and the accelerator opening is obtained, wherein alpha represents the accelerator opening, and M represents the output torque of the diesel engine; the function Fcn in simulink is therefore based on the relationship between diesel opening alpha and diesel torque M as

When the output torque of the diesel engine is obtained through the output of the fuzzy controller, the output torque of the diesel engine passes through an MATLAB Fcn function module, wherein the power of the diesel engine is Shaft motor power of
Shaft motor power of Defining piecewise functions
Defining piecewise functions

Where P is the power required for the operation of the ship. The motor excitation voltage is obtained through the relation in a simultaneous mode, the output rotating speeds of the diesel engine and the shaft motor are synthesized in the gearbox to serve as the input rotating speed of the integrated model of the ship and the oar, and the ship torque signal is fed back to the fuzzy controller to be input in the feedback link, so that the closed-loop control of the ship navigation torque is achieved.
The system consists of a diesel engine, a motor, a fuzzy controller, an electromagnetic clutch, a gear box, a transmission shaft system, a propeller, a DC/DC converter and a storage battery. The method comprises the steps of taking a system target navigational speed and the battery residual capacity as system input signals, driving the opening degree of an accelerator of a diesel engine through a fuzzy logic controller, adjusting the power mode of the system, respectively establishing a system diesel engine mode, a motor mode, a shaft generator mode and a hybrid power mode, and adjusting the working states of the diesel engine and the motor through a controller to realize the stable operation of the hybrid power system.
And selecting the working mode of the diesel-electric hybrid power ship by using the fuzzy controller. The input of the fuzzy controller is a received storage battery residual capacity signal SOC and a power signal required by the running of the ship at the propeller endT n . Firstly, the input signal SOC of the storage battery is utilized by a quantization factor K 1 Fuzzification and ship operation required power T n Using a quantization factor K 2 Firstly, fuzzification is carried out, which subset of fuzzy subsets { XS, S, PS, M, PB, B, XB } the residual electric quantity SOC of the storage battery after the fuzzification is determined according to the fuzzified value, and power T required by running of the ship after the fuzzification is determined n And finding out the position of the fuzzified input in the membership function curve of the fuzzy subset { XS, S, PS, M, PB, B, XB }. Secondly, by using the fuzzy control reasoning relation 'if A and B then C', according to the established fuzzy rule control table (see table 1), the current diesel engine output torque T can be obtained e The fuzzy subset is one of { XS, S, PS, MS, M, MB, PB, B, XB }. Then, a weighted average method is used according to the fuzzy subset of the output diesel engine output torque Judging the gear of the output torque of the diesel engine, and then utilizing a quantization factor K 3 ,
Judging the gear of the output torque of the diesel engine, and then utilizing a quantization factor K 3 , And converting the gear of the output torque of the diesel engine into the real output power of the diesel engine. And finally, converting the output power of the diesel engine into a diesel engine accelerator control signal and a control signal of the excitation voltage of the motor according to a mathematical model of the diesel-electric hybrid power system, controlling the output of the diesel engine and the motor, and selecting a working mode, wherein the output power of the motor is given by the difference between the power required by the operation of the ship and the output power of the diesel engine.
And converting the gear of the output torque of the diesel engine into the real output power of the diesel engine. And finally, converting the output power of the diesel engine into a diesel engine accelerator control signal and a control signal of the excitation voltage of the motor according to a mathematical model of the diesel-electric hybrid power system, controlling the output of the diesel engine and the motor, and selecting a working mode, wherein the output power of the motor is given by the difference between the power required by the operation of the ship and the output power of the diesel engine.
The four operating modes of the diesel-electric hybrid ship are as follows:
(1) diesel mode: when the electric quantity of the storage battery is not sufficient and the power required by the operation of the ship at the propeller end is larger, the output power of the diesel engine provides the power required by the operation of all the ships, and the diesel engine is used as the propulsion power to operate at the optimal working condition point. Therefore, in this state, a mode of providing propulsion power by using diesel oil for propulsion alone is adopted, and the operation diagram of the system in the mode is shown in fig. 10: the work station, namely a fuzzy controller receives the signal of the residual electric quantity of the storage battery and the signal of the power required by the running of the ship at the propeller end, and respectively transmits the diesel output signal, the motor output signal, the DC/DC inverter working signal and the clutch opening and closing signal to each unit. And controlling the clutch 1 to be in a connection state, the three-phase permanent magnet synchronous motor to be out of work, the corresponding clutch 2 to be in a disconnection state, the DC/DC inverter to be in an out-of-work state and the residual electric quantity of the battery to be unchanged by utilizing a corresponding intelligent controller in the workstation. Power flow: diesel engine-clutch 1-gear box-transmission shafting-propeller
(2) Motor mode: when the storage battery has sufficient electric quantity and the power required by the operation of the ship at the propeller end is small, the output power of the diesel engine is almost 0, and the motor provides the power required by the operation of the ship to push the ship to sail. Therefore, the hybrid ship is propelled by the electric motor in this state, and the system operates in this mode as shown in fig. 11: the work station, namely a fuzzy controller receives the signal of the residual electric quantity of the storage battery and the signal of the power required by the running of the ship at the propeller end, and respectively transmits the diesel output signal, the motor output signal, the DC/DC inverter working signal and the clutch opening and closing signal to each unit. By utilizing a corresponding intelligent controller in a workstation, at the moment, the three-phase permanent magnet synchronous motor is in a working motor working state, the output power is given by the difference between the power required by the running of the ship and the output power of the diesel engine, the storage battery directly supplies electric energy to the motor, the DC/DC inverter does not work, the clutch 2 is in a joint state, the diesel engine does not work, and the clutch 1 is in a disconnection state. Power flow: storage battery, motor, clutch 2, gear box, transmission shaft system and propeller.
(3) Shaft generator mode: when the electric quantity of the storage battery is not sufficient and the power required by the operation of the ship at the propeller end is small, the output power of the diesel engine can meet the requirement of the navigation of the ship, and meanwhile, the surplus power can be used for driving the motor to charge the storage battery. Therefore, the shaft generator operation mode is adopted in this state, and the system operation diagram in the mode is shown in fig. 12: the work station, namely a fuzzy controller receives the signal of the residual electric quantity of the storage battery and the signal of the power required by the running of the ship at the propeller end, and respectively transmits the diesel output signal, the motor output signal, the DC/DC inverter working signal and the clutch opening and closing signal to each unit. By using a corresponding intelligent controller in a workstation, the three-phase permanent magnet synchronous motor is in a generator working state, the absorbed power is given by the difference between the power required by the running of a ship and the output power of a diesel engine, the clutch 1 and the clutch 2 are all in a joint state, one part of the output power of the diesel engine is sent to a propeller through the clutch 1 and a gear box, and the other part of the output power of the diesel engine is sent to a shaft generator through the clutch 1, the gear box and the clutch 2. At the moment, the DC/DC inverter works, and the generated energy of the shaft generator is integrated and then is sent to the storage battery to charge the storage battery. Power flow: diesel engine, clutch 1, gear box, transmission shaft system, propeller; the diesel engine, the clutch 1, the gear box, the clutch 2, the shaft generator, the DC/DC inverter and the storage battery.
(4) Hybrid mode: when the storage battery is sufficient in electric quantity and the power required by the operation of the ship is extremely high, the output power of the diesel engine is close to the optimal working condition point, the power required by the operation of the ship cannot be provided completely, and the residual power is provided by the motor. Therefore, the sailing state is driven by the diesel engine and the motor together, and the power requirement of the hybrid power ship can be met, and the system operation diagram in the mode is shown in fig. 13: the work station, namely a fuzzy controller receives the signal of the residual electric quantity of the storage battery and the signal of the power required by the running of the ship at the propeller end, and respectively transmits the diesel output signal, the motor output signal, the DC/DC inverter working signal and the clutch opening and closing signal to each unit. By using a corresponding intelligent controller in a workstation, the three-phase permanent magnet synchronous motor is in a motor working state, the output power is given by the difference between the power required by the running of the ship and the output power of the diesel engine, the clutch 1 and the clutch 2 are both in a joint state, the storage battery directly supplies electric energy to the motor, and the DC/DC inverter does not work. Power flow: diesel engine, clutch 1, gear box, transmission shaft system, propeller; storage battery, motor, clutch 2, gear box, transmission shaft system and propeller.
The above description is only a preferred embodiment of the present invention and is not intended to limit the present invention, and various modifications and changes may be made by those skilled in the art. Any modification, equivalent replacement, or improvement made within the spirit and principle of the present invention should be included in the protection scope of the present invention.
Claims (5)
1. The utility model provides a boats and ships diesel-electric hybrid propulsion system based on fuzzy control which characterized in that: the system comprises a diesel engine, a motor, a fuzzy controller, an electromagnetic clutch, a gear box, a transmission shafting, a propeller, a DC/DC converter and a storage battery; the diesel engine and the three-phase permanent magnet synchronous motor are connected to two input shafts of the gear box in a parallel connection mode, different clutches 1 and 2 are simultaneously arranged on output shafts of the diesel engine and the motor, and the on-off states of the clutches are different under different working modes; a DC/DC inverter is arranged on the side of the three-phase permanent magnet synchronous motor; when the three-phase permanent magnet synchronous motor is used as a shaft generator to generate electricity, the electric energy at the side of the three-phase permanent magnet synchronous motor is integrated, the generated electricity is transferred to a storage battery, and the storage battery is charged; when the three-phase permanent magnet synchronous motor is used as a motor, the motor is directly driven by the storage battery, and the DC/DC inverter does not work at the moment; the working mode of the diesel-electric hybrid power ship by the fuzzy controller is as follows:
step 1: using the input signal SOC of the storage battery by a quantization factor K 1 Fuzzification and ship operation required power T n Using a quantization factor K 2 Firstly fuzzification is carried out, the subset of the fuzzy subset { XS, S, PS, M, PB, B, XB } of the SOC of the residual electric quantity of the storage battery after the fuzzification is determined according to the fuzzification value, and the power T required by the running of the ship after the fuzzification is determined n Finding out the position of the fuzzified input in the membership function curve of the fuzzy subsets { XS, S, PS, M, PB, B, XB };
step 2: using fuzzy control reasoning relation, if A and B then C, according to the established fuzzy rule control table, obtaining the current diesel engine output torque T e The fuzzy subset is represented by XS, S, PS, MS, M, MB,one of PB, B, XB }; wherein S represents minimum, S represents small, PS represents small, MS represents medium or small, M represents medium, MB represents medium or large, PB represents large, B represents large, and XB represents maximum;
and step 3: using a weighted average method based on a fuzzy subset of the output diesel engine output torque Judging the gear of the output torque of the diesel engine, and then utilizing a quantization factor K 3 ,
Judging the gear of the output torque of the diesel engine, and then utilizing a quantization factor K 3 , Converting the gear of the output torque of the diesel engine into the real output power of the diesel engine;
Converting the gear of the output torque of the diesel engine into the real output power of the diesel engine;
and 4, step 4: according to a mathematical model of the diesel-electric hybrid power system, the output power of the diesel engine is converted into a diesel engine throttle control signal and a control signal of the excitation voltage of the motor, the output of the diesel engine and the motor are controlled, and a working mode is selected, wherein the output power of the motor is obtained by the difference between the power required by the operation of the ship and the output power of the diesel engine.
2. The fuzzy control based marine diesel-electric hybrid propulsion system of claim 1, further comprising: when the electric quantity of the storage battery is not sufficient and the power required by the operation of the ship at the propeller end is larger, the output power of the diesel engine provides the power required by the operation of all ships, and the diesel engine is used as the propulsion power to operate at a working point; the clutch 1 is controlled to be in an engaging state, the three-phase permanent magnet synchronous motor does not work, the corresponding clutch 2 is in a disconnecting state, the DC/DC inverter is in a non-working state, and the residual electric quantity of the battery is not changed.
3. The fuzzy control based marine diesel-electric hybrid propulsion system of claim 1, further comprising: when the electric quantity of the storage battery is sufficient and the power required by the operation of the ship at the propeller end is small, the output power of the diesel engine is almost 0, and the motor provides the power required by the operation of the ship to push the ship to sail; the three-phase permanent magnet synchronous motor is in a working motor working state, the output power is given by the difference between the power required by the operation of the ship and the output power of the diesel engine, the storage battery directly supplies electric energy to the motor, the DC/DC inverter does not work, the clutch 2 is in a connection state, the diesel engine does not work, and the clutch 1 is in a disconnection state.
4. The fuzzy control based marine diesel-electric hybrid propulsion system of claim 1, further comprising: when the electric quantity of the storage battery is not sufficient and the power required by the operation of the ship at the propeller end is small, the output power of the diesel engine can meet the requirement of the navigation of the ship, and meanwhile, the surplus power can be used for driving the motor to charge the storage battery; the three-phase permanent magnet synchronous motor is in a generator working state, the absorption power is given by the difference between the power required by the running of the ship and the output power of the diesel engine, the clutch 1 and the clutch 2 are all in a joint state, one part of the output power of the diesel engine is sent to the propeller through the clutch 1 and the gear box, and the other part of the output power of the diesel engine is sent to the shaft generator through the clutch 1, the gear box and the clutch 2; at the moment, the DC/DC inverter works, and the generated energy of the shaft generator is integrated and then is sent to the storage battery to charge the storage battery.
5. The fuzzy control based marine diesel-electric hybrid propulsion system of claim 1, further comprising: when the electric quantity of the storage battery is sufficient and the power required by the operation of the ship is extremely high, the output power of the diesel engine is close to the optimal working condition point, the power required by the operation of the ship cannot be provided completely, and the residual power is provided by the motor; the three-phase permanent magnet synchronous motor is in a motor working state, the output power is given by the difference between the power required by the running of the ship and the output power of the diesel engine, the clutch 1 and the clutch 2 are both in a joint state, the storage battery directly supplies electric energy to the motor, and the DC/DC inverter does not work.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210593221.9A CN114834622A (en) | 2022-05-27 | 2022-05-27 | Ship diesel-electric hybrid power propulsion system based on fuzzy control |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210593221.9A CN114834622A (en) | 2022-05-27 | 2022-05-27 | Ship diesel-electric hybrid power propulsion system based on fuzzy control |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114834622A true CN114834622A (en) | 2022-08-02 |
Family
ID=82572655
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210593221.9A Pending CN114834622A (en) | 2022-05-27 | 2022-05-27 | Ship diesel-electric hybrid power propulsion system based on fuzzy control |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114834622A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116280140A (en) * | 2023-04-13 | 2023-06-23 | 广东海洋大学 | Ship hybrid power energy management method, equipment and medium based on deep learning |
| WO2024170899A1 (en) * | 2023-02-14 | 2024-08-22 | Mathwall Engineering Limited | Hybrid control unit for a watercraft |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104691300A (en) * | 2013-12-04 | 2015-06-10 | 现代自动车株式会社 | System and method for controlling fuzzy engine clutch of hybrid vehicle |
| CN104709456A (en) * | 2015-03-24 | 2015-06-17 | 上海海洋大学 | Series-parallel hybrid power system for tuna longline boat |
| CN107161313A (en) * | 2017-05-23 | 2017-09-15 | 大连理工大学 | A kind of oil electric mixed dynamic reversing control system suitable for working ship |
| CN113148093A (en) * | 2021-04-22 | 2021-07-23 | 哈尔滨工程大学 | Power distribution method of parallel ship hybrid power system |
| CN215752971U (en) * | 2019-12-20 | 2022-02-08 | 财团法人船舶暨海洋产业研发中心 | Hybrid power system |
-
2022
- 2022-05-27 CN CN202210593221.9A patent/CN114834622A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104691300A (en) * | 2013-12-04 | 2015-06-10 | 现代自动车株式会社 | System and method for controlling fuzzy engine clutch of hybrid vehicle |
| CN104709456A (en) * | 2015-03-24 | 2015-06-17 | 上海海洋大学 | Series-parallel hybrid power system for tuna longline boat |
| CN107161313A (en) * | 2017-05-23 | 2017-09-15 | 大连理工大学 | A kind of oil electric mixed dynamic reversing control system suitable for working ship |
| CN215752971U (en) * | 2019-12-20 | 2022-02-08 | 财团法人船舶暨海洋产业研发中心 | Hybrid power system |
| CN113148093A (en) * | 2021-04-22 | 2021-07-23 | 哈尔滨工程大学 | Power distribution method of parallel ship hybrid power system |
Non-Patent Citations (6)
| Title |
|---|
| 万鹤高: "并联混合动力系统能量管理策略研究", 《CNKI的中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》 * |
| 席龙飞: "船舶油电混合动力系统建模与仿真", 《CNKI的中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》 * |
| 张文: "并联混合动力汽车动力系统参数与能量管理策略研究", 《CNKI的中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》 * |
| 徐金云: "并联式混合动力电动汽车控制策略研究", 《CNKI的中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》 * |
| 樊兆明: "混合动力汽车能量管理策略及发动机优化研究", 《CNKI的中国优秀硕士学位论文全文数据库 工程科技Ⅱ辑》 * |
| 黄兴, 等;: "船舶混合动力系统的发展与应用", 《船舶》 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024170899A1 (en) * | 2023-02-14 | 2024-08-22 | Mathwall Engineering Limited | Hybrid control unit for a watercraft |
| CN116280140A (en) * | 2023-04-13 | 2023-06-23 | 广东海洋大学 | Ship hybrid power energy management method, equipment and medium based on deep learning |
| CN116280140B (en) * | 2023-04-13 | 2023-10-10 | 广东海洋大学 | Ship hybrid power energy management method, equipment and medium based on deep learning |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104527958B (en) | Energy optimization and control method of four-engine double-paddle hybrid power propelling system | |
| US7317259B2 (en) | Power output apparatus and motor vehicle equipped with power output apparatus | |
| US9586665B2 (en) | Process for controlling a hybrid naval propulsion system and hybrid propulsion system | |
| CN114834622A (en) | Ship diesel-electric hybrid power propulsion system based on fuzzy control | |
| Grimmelius et al. | Control of hybrid ship drive systems | |
| He et al. | Energy management strategies for a hybrid electric vehicle | |
| CN113602071B (en) | Hybrid power system and control method | |
| CN109823505A (en) | One kind being used for towed steamer hybrid power system and method | |
| CN110065613A (en) | A kind of ship bavin electricity mixed power propulsion system rule energy management control method based on operating mode's switch | |
| CN113071649A (en) | Ship gas-electric hybrid power mode switching coordination control strategy | |
| Tummakuri et al. | Sizing of energy storage system for a battery operated short endurance marine vessel | |
| CN212267818U (en) | Ship with a detachable cover | |
| CN105564530A (en) | Hybrid power system and optimal control method for mechanical outer skeleton | |
| CN209956203U (en) | Hybrid power system for dragging type ship | |
| CN209351576U (en) | Shaft generator control system and ship hybrid power system | |
| CN114074751A (en) | Model selection method for ship equipment and ship | |
| CN112572744A (en) | Double-shaft four-engine ship hybrid power system and propulsion control method thereof | |
| Diju et al. | Control strategy of hybrid electric ship based on improved fuzzy logic threshold | |
| CN113525656B (en) | Gas-electric hybrid power ship energy distribution method based on propeller rotating speed closed loop | |
| Yang et al. | Technology research and experimental simulation of energy management system for diesel electric hybrid ship | |
| Wang et al. | PMP-based equivalent fuel consumption optimization for power distribution of power-split HEVs | |
| CN109878686B (en) | Double-engine single-propeller type gas-electricity hybrid ship power system | |
| CN117755453A (en) | Fuzzy coordination control method for ship diesel-electric combined propulsion | |
| Tian et al. | Research on modelling method of ship hybrid power system | |
| KR20220055785A (en) | Ship's Optimal Navigation System and its Operation Method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20220802 |