CN114719884A - 一种惯导系统姿态测量精度评估方法及应用 - Google Patents
一种惯导系统姿态测量精度评估方法及应用 Download PDFInfo
- Publication number
- CN114719884A CN114719884A CN202210230440.0A CN202210230440A CN114719884A CN 114719884 A CN114719884 A CN 114719884A CN 202210230440 A CN202210230440 A CN 202210230440A CN 114719884 A CN114719884 A CN 114719884A
- Authority
- CN
- China
- Prior art keywords
- navigation system
- attitude
- inspection trolley
- rail inspection
- rail
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Machines For Laying And Maintaining Railways (AREA)
- Navigation (AREA)
Abstract
本发明属于铁路轨道精密测量相关技术领域,并公开了一种惯导系统姿态测量精度评估方法,包括:对被测轨道进行多次重复测量;针对各次重复测量,分别记录组合导航系统原始输出的时间序列观测结果并获取轨检小车有关数据;获得被测轨道在当地施工坐标系下的平面坐标值;将时间序列观测结果转换为等里程间隔空间序列结果;比较多次重复测量的等里程间隔空间序列结果的差异,进而评估组合导航系统姿态测量精度。本发明还公开了相应的系统、轨检小车及应用。通过本发明,不仅能够高效、准确地评估确定惯性导航系统姿态测量精度,而且还很好地适用于各种类型GNSS/INS轨检小车,同时具备操作便捷、可控性好等优点。
Description
技术领域
本发明属于铁路轨道精密测量相关技术领域,更具体地,涉及一种惯导系统姿态测量精度评估方法及应用。
背景技术
铁路作为重要的交通运输手段之一,其运输效率高、能源消耗少,大力发展以铁路为核心的交通运输网络关乎国计民生,对于保证国民经济的快速发展有着重要的战略意义。近年来,我国铁路线网规模的快速增长,随着铁路运营里程的迅速增加,铁路轨道交通的安全运行和运营维护压力日趋加大。铁路轨道对于轨道平顺度的要求极为严格,在高速行车状态下,微小的轨道不平顺也可能带来很大的轮轨作用力,从而存在安全隐患。因此,对于铁路轨道的维护和保养来说,必需快速高效地测量轨道的不平顺性。
专利检索发现,CN103343498A公开了一种基于惯性导航系统(INS)与全球导航卫星系统(GNSS)组合导航系统的轨道几何状态测量方法,其中以INS/GNSS组合导航系统为核心测量设备,依靠高精度的GNSS/INS组合导航系统所带惯性导航系统出色的相对测量能力,可快速获取轨道不平顺和轨道调整量,将轨道调整至最佳平顺位置。该轨道几何状态测量方法具有测量速度快、精度高、操作简单等优势,可满足高铁轨道精密测量的需求。
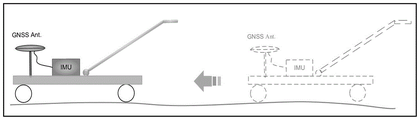
进一步的分析研究表明,对于GNSS/INS轨检小车来说,保证惯性导航系统高精度姿态测量是实现轨道精密测量任务的前提。在实际的轨道不平顺测量任务中,GNSS/INS组合导航系统通常安装在轨检小车上,与小车的车体刚性固联,由此准确感知小车的运动状态变化。同时,轨检小车的车轮始终与被测轨道保持刚性接触,小车的运动轨迹能够反映出真实的轨道空间几何状态。当轨检小车搭载GNSS/INS组合导航系统进行轨道移动精密测量时,轨道不平顺信息会通过小车运动姿态状态的变化传递到惯性导航系统,然后根据惯性器件的输出信息进行数值积分运算求解出轨检小车的姿态等导航参数,从而统准确感知和测量出来轨道不平顺信息。
因此,有必要针对轨检小车搭载的惯性导航系统提前进行姿态精度的评估,以确保轨道不平顺测量的精度。然而,现有技术中惯性导航系统的姿态精度的考核评估是以地面转台试验为主,即采用高精度地面转台设备,来评估其姿态角的精度。这种姿态精度评估方案不仅耗时长、成本高,而且不利于GNSS/INS轨检小车的大规模应用和推广。相应地,如何开发出一种高精度高效率且便捷可靠的惯导系统姿态测量精度评估方法,正成为本领域亟待解决的技术问题之一。
发明内容
针对现有技术的以上缺陷或需求,本发明的目的在于提供一种惯导系统姿态测量精度评估方法及应用,其中通过对整个评估工艺流程重新进行了设计,并对关键操作步骤及评估机理等多个方面作出针对性改进,相应在无需额外精密测量设备的条件下,能够高效、准确地评估确定惯性导航系统姿态测量精度,进而为铁路轨道不平顺测量提供可靠的保障,同时具备操作便捷、可控性好、可更好地适用于各类GNSS/INS轨检小车等特点,因而尤其适用于各类复杂环境下的铁路轨道不平顺信息测量应用场合。
为实现上述目的,按照本发明的一个方面,提供了一种惯导系统姿态测量精度评估方法,其特征在于,该方法包括:
(1)推动搭载有GNSS/INS组合导航系统的轨检小车,对被测轨道进行多次重复测量;
(2)针对各次重复测量,分别记录组合导航系统原始输出的时间序列观测结果,同时获取有关轨检小车经纬度、高程坐标和姿态角的数据;
(3)基于轨检小车经纬度数据,获得被测轨道在当地施工坐标系下的平面坐标值;
(4)将组合导航系统原始输出的时间序列观测结果转换为等里程间隔空间序列结果;
(5)比较多次重复测量的等里程间隔空间序列结果的差异,并统计这些差异值来评估组合导航系统姿态测量精度,由此完成整个的评估过程。
作为进一步优选地,步骤(1)包括下列子步骤:
(1.1)轨检小车开机并完成初始化;
(1.2)沿着被测轨道分别向前、向后推动轨检小车,使其在测量起点和测量终点之间做往复运动,实现对被测轨道的多次重复测量。
作为进一步优选地,在步骤(2)中,所述导航系统原始输出的观测结果包括:GNSS观测信息、INS角速度信息、INS加速度信息,以及GNSS基站的原始观测信息。
作为进一步优选地,在步骤(2)中,所述有关轨检小车经纬度、高程坐标和姿态角的数据包括:轨检小车大地经度、大地纬度、大地高、横滚角、俯仰角和航向角。
作为进一步优选地,在步骤(3)中,所述被测轨道的平面坐标值包括北方向坐标值和东方向坐标值。
作为进一步优选地,步骤(4)包括下列子步骤:
(4.1)根据步骤(3)获得的平面坐标值,结合所述高程坐标计算得出轨检小车各个时刻对应的累计里程值;
(4.2)根据轨检小车各个时刻对应的累计里程值,按照预设的里程间隔对所述时间序列观测结果进行空间降采样处理,由此转换为等里程间隔空间序列结果。
作为进一步优选地,在子步骤(4.2)中,所述空间降采样处理包括如下过程:首先将所述时间序列观测结果按照预设的里程间隔进行分段;接着对各个分段内的里程和姿态角数据进行求平均,并获取对应的平均值。
作为进一步优选地,在子步骤(4.2)中,所述预设的里程间隔为0.2米。
作为进一步优选地,在步骤(5)中,还包括以下的处理过程:根据所述等里程间隔空间序列结果,画出对应的里程-姿态曲线,由此从整体上评估多次测量的姿态差异。
按照本发明的另一方面,还提供了相应的惯导系统姿态测量精度评估系统,其特征在于,该系统包括:
测量模块,该测量模块用于推动搭载有GNSS/INS组合导航系统的轨检小车,对被测轨道进行多次重复测量;
数据获取模块,该数据获取模块用于针对各次重复测量,分别记录组合导航系统原始输出的时间序列观测结果,同时获取有关轨检小车经纬度、高程坐标和姿态角的数据;
平面坐标值计算模块,该用于平面坐标值计算模块基于轨检小车经纬度数据,获得被测轨道在当地施工坐标系下的平面坐标值;
转换模块,该转换模块用于将组合导航系统原始输出的时间序列观测结果转换为等里程间隔空间序列结果;
评估模块,该评估模块用于比较多次重复测量的等里程间隔空间序列结果的差异,并统计这些差异值来评估组合导航系统姿态测量精度,由此完成整个的评估过程。
按照本发明的又一方面,还提供了一种轨检小车,其特征在于,其采用上述方法来执行惯导系统姿态测量精度评估过程。
按照本发明的又一方面,还提供了一种基于GNSS/INS组合导航系统的铁路轨道平顺性测量方法,其特征在于,其采用上述的方法提前进行精度评估。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
(1)本发明通过对整个评估工艺流程重新进行了设计,并对关键操作步骤及评估机理等多个方面作出针对性改进,不仅能够高效、准确地评估确定惯性导航系统姿态测量精度,为轨道不平顺测量提供保障,而且很好地适用于各种类型的GNSS/INS组合导航系统及轨检小车,同时不需要任何其他的额外高精度测量设备;
(2)本发明的工艺方法整体操作便捷、可控性好,可使得GNSS/INS组合导航系统的观测结果获得更为全面的利用,数据利用率高;此外通过等里程间隔的空间降采样处理,便于将时间序列转化为空间序列,并有效规避由于测量速度不同导致的姿态序列不对应等问题;
(3)本发明充分利用了铁路轨道不平顺信息在短时间内不会变化的特征,通过比较同一段轨道多次连续测量结果,可以确保惯导系统姿态评估的准确性和可靠性,因而尤其适用于各类复杂环境下的铁路轨道不平顺信息测量应用场合。
附图说明
图1是用于示范性说明按照本发明设计的惯导系统姿态测量精度评估方法的整体工艺流程图;
图2是GNSS/INS轨检小车进行轨道不平顺测量的应用示意图;
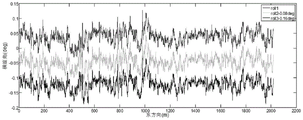
图3a-3c是按照本发明优选实施例而得到的里程-姿态曲线图,更具体地,其中图3a是里程-横滚角曲线图,图3b是里程-俯仰角曲线图,图3c是里程-航向角曲线图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
按照本发明的惯导系统姿态测量精度评估方法,充分利用了铁路轨道不平顺信息在短时间内不会变化的特征,并通过采用等里程间隔的空间降采样处理等操作手段,由此确保了惯导系统姿态评估的准确性和可靠性。
图1是用于示范性说明按照本发明设计的惯导系统姿态测量精度评估方法的整体工艺流程图。下面将结合图1来更为具体地解释说明本发明。
步骤一,轨检小车的测量步骤。
在此步骤中,推动搭载有GNSS/INS组合导航系统的轨检小车,对被测轨道进行多次重复测量。
更具体而言,轨检小车各传感器开机,各传感器正常输出数据。测量人员沿被测轨道分别向前、向后推动轨检小车,使轨检小车在测量起点和测量终点做往复运动,实现对被测轨道的多次重复测量。
步骤二,针对各次重复测量,分别记录组合导航系统原始输出的时间序列观测结果,同时获取轨检小车有关数据。
在此步骤中,所述导航系统原始输出的观测结果进一步可包括:GNSS观测信息、INS角速度信息、INS加速度信息,以及GNSS基站的原始观测信息。此外,所述有关轨检小车经纬度、高程坐标和姿态角的数据进一步可包括:轨检小车大地经度、大地纬度、大地高、横滚角、俯仰角和航向角。
步骤三,获得被测轨道在当地施工坐标系下的平面坐标值。
在此步骤中,譬如可采用高斯投影模型,根据轨检小车经纬度信息获取当地施工坐标系下被测轨道的平面坐标,并用于下一部分里程计算和空间降采样过程。平面坐标具体可包括北方向坐标和东方向坐标。
更具体而言,上述通过轨检小车搭载GNSS/INS系统的原始输出,譬如可利用GNSS绝对定位解算、惯性导航系统推算以及组合导航解算这些本领域熟知的已有方式,获取轨检小车的大地经纬度、高程坐标和姿态角等信息。此外,采用高斯投影模获取当地施工坐标系下被测轨道的平面坐标的过程同样为本领域技术人员所公知,因此在此不再赘述。
步骤四,将组合导航系统原始输出的时间序列观测结果转换为等里程间隔空间序列结果。
在此步骤中,首先是根据所获得的平面坐标值,结合所述高程坐标计算得出轨检小车各个时刻对应的累计里程值;
接着,根据轨检小车各个时刻对应的累计里程值,按照预设的里程间隔对所述时间序列观测结果进行空间降采样处理,由此转换为等里程间隔空间序列结果。
更具体进行解释的话,首先是计算出轨检小车各个时刻对应的累积里程值。
轨检小车各个时刻对应的累积里程值的推算公式譬如可表示如下:

式中,Erailway,Nrailway,Hrailway分别为被测轨检小车东方向坐标、北方向坐标和高程坐标。
接着,根据轨检小车各个时刻的累积里程值,譬如可按照0.2m长度的里程间隔,对被测轨道数据沿里程方向进行空间降采样处理,将GNSS/INS系统输出的时间序列转化为空间序列。
在此处理过程中,空间降采样处理主要通过对同一段轨道各个重复测回数据按照0.2m的里程长度间隔进行分段。然后对各个分段内里程和姿态角信息进行求平均,获取0.2米范围内的里程和姿态角的平均值,从而实现按照0.2m里程长度间隔的空间降采样。通过空间降采样过程来实现时间序列转换为空间序列推算公式可表示如下:

式中,ASpace代表姿态测量结果的空间序列ATime代表姿态测量结果的时间序列,AMean代表0.2m里程间隔范围内所有ATime的平均值。
步骤五,比较多次重复测量的等里程间隔空间序列结果的差异,并统计这些差异值来评估组合导航系统姿态测量精度,由此完成整个的评估过程。
在此步骤中,优选可根据同一段轨道多次重复测量结果的空间序列结果,画出对应的里程-姿态曲线,从整体评估多次测量的姿态差异;此外,对同一段轨道多次重复测量结果的空间序列结果进行做差处理,统计多次测量结果的姿态差异值,从而准确评估惯性导航系统的姿态测量精度。
如图3a-3c具体所示,图3a是里程-横滚角曲线,图3b是里程-俯仰角曲线,图3c是里程-航向角曲线。由于各个测回的姿态角变化差异很小,在图中表示的第二次测量和第三次测量的横滚角、俯仰角以及航向角数值分别沿着y轴作整体平移的处理,将三次测量的姿态角数值图区分开来,以方便更好的观测和对比不同测回姿态角的波形变化。
综上,按照本发明提出了一种步骤清晰、逻辑性好、处理效率高且评估精度高的GNSS/INS轨检小车姿态测量精度评估方法。本发明利用铁路轨道不平顺信息在短时间内不会变化的特征,同时轨检小车运动轨迹可以准确反映出真实轨道不平顺状态并传递给GNSS/INS系统,通过对同一段轨道进行连续多次重复测量,计算多次测量姿态曲线的重复性,从而有效、准确地确定惯性导航系统姿态测量精度。此方法针对不同类型GNSS/INS组合导航系统均适用,不需要额外的高精度测量设备,并且操作简便。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
Claims (10)
1.一种惯导系统姿态测量精度评估方法,其特征在于,该方法包括:
(1)推动搭载有GNSS/INS组合导航系统的轨检小车,对被测轨道进行多次重复测量;
(2)针对各次重复测量,分别记录组合导航系统原始输出的时间序列观测结果,同时获取有关轨检小车经纬度、高程坐标和姿态角的数据;
(3)基于轨检小车经纬度数据,获得被测轨道在当地施工坐标系下的平面坐标值;
(4)将组合导航系统原始输出的时间序列观测结果转换为等里程间隔空间序列结果;
(5)比较多次重复测量的等里程间隔空间序列结果的差异,并统计这些差异值来评估组合导航系统姿态测量精度,由此完成整个的评估过程。
2.如权利要求1所述的一种惯导系统姿态测量精度评估方法,其特征在于,步骤(1)包括下列子步骤:
(1.1)轨检小车开机并完成初始化;
(1.2)沿着被测轨道分别向前、向后推动轨检小车,使其在测量起点和测量终点之间做往复运动,实现对被测轨道的多次重复测量。
3.如权利要求1或2所述的一种惯导系统姿态测量精度评估方法,其特征在于,在步骤(2)中,所述导航系统原始输出的观测结果包括:GNSS观测信息、INS角速度信息、INS加速度信息,以及GNSS基站的原始观测信息。
4.如权利要求3所述的一种惯导系统姿态测量精度评估方法,其特征在于,所述有关轨检小车经纬度、高程坐标和姿态角的数据包括:轨检小车大地经度、大地纬度、大地高、横滚角、俯仰角和航向角。
5.如权利要求1-4任意一项所述的一种惯导系统姿态测量精度评估方法,其特征在于,步骤(4)包括下列子步骤:
(4.1)根据步骤(3)获得的平面坐标值,结合所述高程坐标计算得出轨检小车各个时刻对应的累计里程值;
(4.2)根据轨检小车各个时刻对应的累计里程值,按照预设的里程间隔对所述时间序列观测结果进行空间降采样处理,由此转换为等里程间隔空间序列结果。
6.如权利要求5所述的一种惯导系统姿态测量精度评估方法,其特征在于,在子步骤(4.2)中,所述空间降采样处理包括如下过程:首先将所述时间序列观测结果按照预设的里程间隔进行分段;接着对各个分段内的里程和姿态角数据进行求平均,并获取对应的平均值。
7.如权利要求1-6任意一项所述的一种惯导系统姿态测量精度评估方法,其特征在于,在步骤(5)中,还包括以下的处理过程:根据所述等里程间隔空间序列结果,画出对应的里程-姿态曲线,由此从整体上评估多次测量的姿态差异。
8.一种惯导系统姿态测量精度评估系统,其特征在于,该系统包括:
测量模块,该测量模块用于推动搭载有GNSS/INS组合导航系统的轨检小车,对被测轨道进行多次重复测量;
数据获取模块,该数据获取模块用于针对各次重复测量,分别记录组合导航系统原始输出的时间序列观测结果,同时获取有关轨检小车经纬度、高程坐标和姿态角的数据;
平面坐标值计算模块,该用于平面坐标值计算模块基于轨检小车经纬度数据,获得被测轨道在当地施工坐标系下的平面坐标值;
转换模块,该转换模块用于将组合导航系统原始输出的时间序列观测结果转换为等里程间隔空间序列结果;
评估模块,该评估模块用于比较多次重复测量的等里程间隔空间序列结果的差异,并统计这些差异值来评估组合导航系统姿态测量精度,由此完成整个的评估过程。
9.一种轨检小车,其特征在于,其采用如权利要求1-7任意一项所述的方法来执行惯导系统姿态测量精度评估过程。
10.一种基于GNSS/INS组合导航系统的铁路轨道平顺性测量方法,其特征在于,其采用如权利要求1-7任意一项所述的方法提前进行精度评估。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210230440.0A CN114719884A (zh) | 2022-03-09 | 2022-03-09 | 一种惯导系统姿态测量精度评估方法及应用 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210230440.0A CN114719884A (zh) | 2022-03-09 | 2022-03-09 | 一种惯导系统姿态测量精度评估方法及应用 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114719884A true CN114719884A (zh) | 2022-07-08 |
Family
ID=82236863
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210230440.0A Pending CN114719884A (zh) | 2022-03-09 | 2022-03-09 | 一种惯导系统姿态测量精度评估方法及应用 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114719884A (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115540912A (zh) * | 2022-10-28 | 2022-12-30 | 中煤科工集团上海有限公司 | 采煤机惯性导航精度测评系统及其精度测评方法 |
| CN115540911A (zh) * | 2022-10-28 | 2022-12-30 | 中煤科工集团上海有限公司 | 采煤机惯性导航精度测评系统及测评方法、移动载体 |
| CN115790646A (zh) * | 2022-10-28 | 2023-03-14 | 中煤科工集团上海有限公司 | 采煤机惯性导航精度测评系统及测评方法、移动载体 |
| CN116105699A (zh) * | 2022-12-20 | 2023-05-12 | 中国铁路设计集团有限公司 | 一种多模式精密搭接的轨道精测方法 |
-
2022
- 2022-03-09 CN CN202210230440.0A patent/CN114719884A/zh active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115540912A (zh) * | 2022-10-28 | 2022-12-30 | 中煤科工集团上海有限公司 | 采煤机惯性导航精度测评系统及其精度测评方法 |
| CN115540911A (zh) * | 2022-10-28 | 2022-12-30 | 中煤科工集团上海有限公司 | 采煤机惯性导航精度测评系统及测评方法、移动载体 |
| CN115790646A (zh) * | 2022-10-28 | 2023-03-14 | 中煤科工集团上海有限公司 | 采煤机惯性导航精度测评系统及测评方法、移动载体 |
| WO2024087473A1 (zh) * | 2022-10-28 | 2024-05-02 | 中煤科工集团上海有限公司 | 采煤机惯性导航精度测评系统及测评方法、移动载体 |
| CN116105699A (zh) * | 2022-12-20 | 2023-05-12 | 中国铁路设计集团有限公司 | 一种多模式精密搭接的轨道精测方法 |
| CN116105699B (zh) * | 2022-12-20 | 2024-03-22 | 中国铁路设计集团有限公司 | 一种多模式精密搭接的轨道精测方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114719884A (zh) | 一种惯导系统姿态测量精度评估方法及应用 | |
| WO2023019709A1 (zh) | 基于车载移动激光点云的接触网导高与拉出值自动检测方法 | |
| CN107402006B (zh) | 基于轨道几何特征信息匹配的列车精密定位方法和系统 | |
| CN102337710B (zh) | 一种gps轨道不平顺检测系统及其检测方法 | |
| CN103162689B (zh) | 辅助车载定位系统及车辆的辅助定位方法 | |
| CN104021676B (zh) | 基于车辆动态视频特征的车辆定位及车速测量方法 | |
| CN103343498B (zh) | 一种基于ins/gnss的轨道不平顺检测系统及方法 | |
| CN108842544B (zh) | 一种利用光纤惯导的高铁轨道静态参数检测系统和方法 | |
| CN106091951A (zh) | 一种城轨列车轮缘参数在线检测系统及方法 | |
| CN108444432B (zh) | 一种铁路既有线控制网及轨道线形同步测量方法 | |
| CN111998828B (zh) | 一种基于便携式gps的道路坡度估算方法 | |
| CN104047212B (zh) | 一种基于角度量测的轨道沉降自动测量装置及方法 | |
| CN110658543B (zh) | 一种基于非接触式测量的高速铁路轨道几何参数检测方法 | |
| CN111536969A (zh) | 一种基于初始姿态角自对准的小径管道机器人定位方法 | |
| CN115219662A (zh) | 一种多渠道的碳排放量综合监测方法 | |
| CN109334706A (zh) | 卫星定位与惯导一体化的轨检小车 | |
| CN115597535A (zh) | 基于惯性导航的高速磁悬浮轨道不平顺检测系统及方法 | |
| Chen et al. | Experimental study on the potential of vehicle’s attitude response to railway track irregularity in precise train localization | |
| CN104422921A (zh) | 一种基于方位和自时差测量的固定单站无源定位系统 | |
| CN108413945B (zh) | 轨道坐标点经纬高测量装置及方法 | |
| CN209382013U (zh) | 卫星定位与惯导一体化的轨检小车 | |
| CN109443316B (zh) | 一种铁塔倾斜状态监测方法及系统 | |
| CN117970380A (zh) | 一种铁路机车的卫星定位完好性实时判别方法及装置 | |
| CN114136275A (zh) | 一种轨道线路状态检测装置及路基沉降检测方法 | |
| CN111538044B (zh) | 低成本rtk接收机定位精度测试方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |