CN113747001A - Electronic equipment and camera module - Google Patents
Electronic equipment and camera module Download PDFInfo
- Publication number
- CN113747001A CN113747001A CN202010460779.0A CN202010460779A CN113747001A CN 113747001 A CN113747001 A CN 113747001A CN 202010460779 A CN202010460779 A CN 202010460779A CN 113747001 A CN113747001 A CN 113747001A
- Authority
- CN
- China
- Prior art keywords
- camera module
- driving assembly
- image sensor
- reflector
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
- H04N23/687—Vibration or motion blur correction performed by mechanical compensation by shifting the lens or sensor position
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Abstract
The embodiment of the application provides electronic equipment and a camera module, wherein the camera module comprises a first reflector, a lens group and an image sensor which are sequentially arranged along the extension direction of an optical axis; the camera module further comprises a first driving assembly and a second driving assembly which are respectively connected to the first reflector and the image sensor; first drive assembly is used for driving first speculum and rotates around first axis of rotation and second axis of rotation respectively, second drive assembly is used for driving image sensor and rotates around the optical axis, like this, when the first speculum of camera module is when rotating around first axis of rotation and second axis of rotation, accessible second drive assembly drives this image sensor and follows rotatory certain angle in the anti-direction of image rotation around the optical axis, this angle is unanimous with image rotation angle, in order to offset image rotation angle, play despun's effect, make the formation of image of light beam on image sensor can not take place rotatoryly, the definition of image has also been ensured simultaneously.
Description
Technical Field
The embodiment of the application relates to the technical field of terminal equipment, in particular to electronic equipment and a camera module.
Background
With the continuous improvement of the shooting requirements of users, the application of the periscopic camera module on the terminal equipment such as mobile phones is more and more common due to the fact that the periscopic camera module has an ultra-long-distance shooting function. In the process of shooting or photographing, the hand of a user shakes or other external factors influence the terminal equipment and the camera module to shake, so that the shot image is not clear, and the image quality is influenced.
In order to solve the problem, a driving mechanism is generally connected to the reflector of the periscopic camera module, and the driving mechanism drives the reflector to rotate around the axis perpendicular to the ground and rotate in the direction parallel to the ground and the optical axis, so as to offset the shaking angle of the camera module in the direction perpendicular to the ground and parallel to the ground, thereby playing the role of anti-shaking. And the speculum of camera module is at the rotatory anti-shake in-process around the biax, can make the formation of image rotatory shake around the optical axis, appears like soon the problem promptly.
The electronic image rotation elimination method adopted in the related art is to perform edge clipping on an image rotated around an optical axis to return to a positive image, but the problem of imaging blur caused by rotation around the optical axis cannot be solved.
Disclosure of Invention
The embodiment of the application provides an electronic device and a camera module, and can solve the problems that an image of the camera module is still fuzzy after racemization by adopting an electronic racemization method in the related art and other potential problems.
The embodiment of the application provides a camera module, which comprises a first reflector, a lens group and an image sensor, wherein the first reflector, the lens group and the image sensor are sequentially arranged along the extension direction of an optical axis;
the camera module further comprises a first driving assembly and a second driving assembly which are respectively connected to the first reflector and the image sensor; the first driving assembly is used for driving the first reflector to rotate around the first rotating axis and the second rotating axis respectively, and the second driving assembly is used for driving the image sensor to rotate around the optical axis;
the optical axis is the central axis of incident light after being reflected by the first reflector, the first rotating axis is the vertical axis of the first reflector, a preset included angle is formed between the extending direction of the first rotating axis and the thickness direction of the camera module, the second rotating axis is the horizontal axis of the first reflector, and the extending direction of the second rotating axis is consistent with the width direction of the camera module.
The embodiment of the application is characterized in that a first driving assembly is connected to a first reflector, and the first driving assembly can drive the first reflector to rotate around a first rotating axis and a second rotating axis respectively, so that when the camera module generates translational shake along the extending direction of an optical axis or generates rotational shake around the axis of the camera module in the width direction, the first reflector can be driven to rotate around the second rotating axis by the first driving assembly to compensate the deflection angle of incident light when the camera module generates shake along the width direction, and when the camera module generates translational shake along the width direction or generates rotational shake around the optical axis, the first reflector can be driven to rotate around the first rotating axis by the first driving assembly to compensate the deflection angle of the incident light when the camera module generates shake, thereby realizing the anti-shake effect of the camera module. Simultaneously, this application embodiment is through connecting the second drive assembly on image sensor, and this second drive assembly can drive this image sensor and revolve around the optical axis, like this, when the first speculum of camera module is rotatory around first axis of rotation and second axis of rotation, accessible second drive assembly drives this image sensor and revolves the angle around the optical axis along the rotatory reverse direction of image certain angle, this angle is unanimous with like the angle of gyration, in order to offset like the gyration angle, play despinning effect, make the formation of image of light beam on image sensor can not take place the rotation, ensure that the image that image sensor finally obtained is unanimous with the angle of actual object image, the definition of image has also been ensured simultaneously.
In one possible implementation, the camera module further includes a flexible circuit board;
the second drive assembly comprises a fixed part and a movable part, the movable part of the second drive assembly is connected to the image sensor, the fixed part of the second drive assembly is connected to the flexible circuit board, the second drive assembly and the flexible circuit board are arranged in the extending direction of the optical axis, the second drive assembly and the flexible circuit board are located on the image sensor, the image sensor deviates from one side of the mirror group, and the second drive assembly is located between the image sensor and the flexible circuit board.
This application embodiment is through connecting the movable part of second drive assembly on image sensor, connects this second drive assembly's fixed part on flexible circuit board, when guaranteeing the movable part of second drive assembly to image sensor's normal drive, has improved the assembly stability of second drive assembly's fixed part. In addition, the second driving assembly and the flexible circuit board are arranged along the extending direction of the optical axis, so that the second driving assembly and the flexible circuit board are prevented from occupying the space in the thickness direction of the camera module, and the thickness size of the camera module is reduced.
In a possible implementation manner, the second driving assembly includes an electrostatic micro-actuator, a stator of the electrostatic micro-actuator is a fixed portion of the second driving assembly, and a mover of the electrostatic micro-actuator is a movable portion of the second driving assembly.
Through setting up the second drive assembly into the electrostatic type micro drive ware to simplify the structure of second drive assembly, make this second drive assembly's operation more convenient simultaneously, also improved this second drive assembly in addition to image sensor's control accuracy, also make this second drive assembly have efficient, generate heat low and response speed is fast characteristics.
In one possible implementation, the image sensor is electrically connected to the flexible circuit board by a lead;
the length of the lead is larger than the vertical distance between the image sensor and the flexible circuit board, so that the lead can have a certain moving range in the rotation process of the image sensor, and the situation that the lead is damaged or even broken due to stress concentration under the pulling of the image sensor is avoided.
In a feasible implementation manner, a plurality of leads are respectively arranged at two opposite ends of the image sensor along the width direction of the camera module, and the plurality of leads are arranged at intervals along the thickness direction of the camera module.
This application embodiment sets up a plurality of leads respectively through the both sides at image sensor to realize the transmission of the multiple function signal between image sensor and the flexible circuit board, thereby richen the signal transmission kind between image sensor and the external device, and then richen the function of camera module. In addition, the plurality of leads are respectively arranged at two ends of the image sensor which are oppositely arranged along the width direction, so that the leads are prevented from occupying the space in the thickness direction of the camera module, and the thickness size of the camera module is reduced.
In one possible implementation, the outer surface of each lead is covered with an insulating layer to prevent short circuit between two adjacent leads.
In a feasible implementation manner, the camera module further comprises a control module and a detection module, wherein the control module is in signal connection with the detection module, the first driving assembly and the second driving assembly respectively;
the detection module is used for detecting and outputting the shaking angle of the camera module; the control module is used for receiving the shaking angle, controlling the first driving assembly to drive the first reflector to rotate around the first rotating axis and the second rotating axis respectively according to the shaking angle, and controlling the second driving assembly to drive the image sensor to rotate around the optical axis;
the first driving assembly and the second driving assembly are also used for outputting the rotation angles of the first reflector and the image sensor respectively; the control module is further used for receiving the rotation angles of the first reflector and the image sensor so as to control the first driving assembly and the second driving assembly to stop working when the rotation angles of the first reflector and the image sensor respectively reach the anti-shake angle value and the despin angle value.
The control module and the detection module of the embodiment of the application are arranged, so that the first driving assembly and the second driving assembly can work in time and simultaneously when the camera module shakes, the first reflector and the image sensor can rotate simultaneously according to the shaking angle, namely the deflection angle of incident light, and the synchronous work of anti-shaking and rotation-eliminating work is realized, and the anti-shaking and rotation-eliminating efficiency of the camera module is improved. In addition, the first driving assembly and the second driving assembly can feed back the rotation angle to the control module in real time, so that the control module can timely and accurately control the first driving assembly and the second driving assembly to stop working when the rotation angle reaches an anti-shake angle value and a rotation-eliminating angle value, and the anti-shake precision and the rotation-eliminating precision of the camera module are improved.
In a feasible implementation manner, the camera module further includes two capacitive feedback modules;
two ends of one of the two capacitance feedback modules are respectively in signal connection with the first driving assembly and the control module so as to feed back a driving signal of the first driving assembly to the control module; the driving signal of the first driving component corresponds to the rotation angle of the first reflector;
two ends of the other of the two capacitance feedback modules are respectively in signal connection with the second driving assembly and the control module so as to feed back the driving signal of the second driving assembly to the control module; and the driving signal of the second driving component corresponds to the rotation angle of the image sensor.
The embodiment of the application has the advantages that the capacitance feedback module is in signal connection with the first driving assembly and the control module and the second driving assembly and the control module, so that the driving signal of the first driving assembly is accurately and timely fed back to the control module, and the driving signal of the second driving assembly is accurately and timely fed back to the control module, so that the anti-shaking efficiency and the rotation eliminating efficiency of the camera module are improved, the anti-shaking and rotation eliminating precision of the camera module are improved, and the definition of an image shot by the camera module is improved.
In a feasible implementation manner, the size of the second driving component in the thickness direction of the camera module is equal to or smaller than the size of the image sensor in the thickness direction of the camera module, so that the thickness of the camera module cannot be increased due to the arrangement of the second driving component.
In a feasible implementation, the camera module has the interval along two lateral walls that thickness direction set up and image sensor between, for image sensor reserves the activity space around the rotation of optical axis, guarantees that image sensor can not take place to collide with along the both sides wall of thickness direction with the camera module when rotatory around the optical axis.
In a possible implementation manner, the camera module further includes a second reflecting mirror and a third reflecting mirror;
the second reflector and the third reflector are located between the image sensor and the first reflector, the second reflector is located in the extending direction of the optical axis, the third reflector is arranged opposite to the second reflector along the width direction of the camera module, and the second reflector is used for reflecting light to the third reflector and reflecting the light reflected back by the third reflector to the image sensor.
The three-time bending of incident light is realized by the arrangement of the first reflector, the second reflector and the third reflector, so that the size of the camera module in the thickness direction and the extension direction of an optical axis is reduced while the image distance of the camera module is increased.
In a feasible implementation manner, the camera module further includes a third driving assembly connected to the second reflecting mirror or the third reflecting mirror, and the third driving assembly is configured to drive the second reflecting mirror or the third reflecting mirror to move along a width direction of the camera module, so as to change a focal length of the camera module.
This application embodiment is through setting up the third drive assembly on second mirror or third speculum for this second mirror and third speculum can move towards each other or keep away from each other along the width direction of camera module, and like this, when the adjustment of the focus to the camera module is realized, occupation space when having practiced thrift second mirror and third speculum and having removed on the extending direction of z direction and optical axis l, thereby the length dimension and the thickness dimension of camera module have been reduced.
In a feasible implementation manner, the first driving component and the first reflecting mirror are configured into an integrated MEMS micro-mirror, so that not only is the occupied space of the first driving component and the first reflecting mirror in the camera module saved, but also the MEMS micro-mirror has light weight, and is convenient for realizing double-axis large-angle rotation.
In a possible implementation manner, the first driving assembly includes any one of an electrostatic type micro-actuator, a magneto-electric type micro-actuator, a piezoelectric type micro-actuator, a shape memory alloy type micro-actuator, and a thermo-electric type micro-actuator, so that the arrangement type of the first driving assembly is more flexible.
The embodiment of the application also provides electronic equipment which comprises a shell and the camera module; the camera module is arranged on the shell.
This application embodiment is through setting up above-mentioned camera module on electronic equipment's casing, has not only realized the anti-shake effect of camera module, has solved the camera module simultaneously and has revolved the problem at the image that anti-shake in-process appears, even make the formation of image of light beam on image sensor can not take place the rotation, ensure that the image that image sensor finally obtained is unanimous with the angle of actual object image, also ensured the definition of the image that electronic equipment shot simultaneously.
Drawings
Fig. 1 is a schematic structural diagram of a conventional periscopic camera module;
FIG. 2 is a schematic diagram of an optical path of the periscopic camera module shown in FIG. 1 during shaking;
FIG. 3 is a schematic structural diagram of an electronic device according to an embodiment of the present application;
fig. 4 is a first structural schematic diagram of a camera module according to an embodiment of the present application;
FIG. 5 is a cross-sectional view taken along line A-A of FIG. 4;
fig. 6 is a schematic diagram of a second internal structure of the camera module according to the embodiment of the present application;
FIG. 7 is a cross-sectional view taken along line B-B of FIG. 5;
fig. 8 is a partial structural schematic view of a third structure of the camera module according to the embodiment of the present application;
fig. 9 is a fourth structural schematic diagram of the camera module according to the embodiment of the present application;
fig. 10 is a schematic diagram of the optical path of fig. 9 after the second mirror has been moved.
Description of reference numerals:
100-an electronic device;
10-periscopic camera module; 110-a housing; 211-a light transmissive region; 120-object to be shot;
11-a mirror; 12. 23-a lens group; 13. 24-an image sensor; 20-a camera module; 21-a housing; 22-a first mirror; 25-a first drive assembly; 26-a second drive assembly; 27-a filter; 28-a flexible circuit board; 29-a detection module; 30-a control module; 31-a capacitive feedback module; 32-a second mirror; 33-a third mirror; 34-a third drive assembly;
241-a lead; 22a-MEMS micro-mirror.
Detailed Description
The terminology used in the description of the embodiments section of the present application is for the purpose of describing particular embodiments of the present application only and is not intended to be limiting of the present application.
In recent years, camera and video camera functions have become the basic equipment of handheld communication devices such as mobile phones, personal digital assistants, and notebook computers. With the improvement of the shooting requirements of users on mobile phones and other electronic devices, the traditional shooting cannot meet the requirements of users, and the application of large-focus long-range shooting, such as periscopic camera modules, on the mobile phones and other electronic devices is more and more common.
In the process of shooting or photographing, the electronic device 100 and the camera module shake due to the shake of the hand of the user or the influence of other external factors, so that the shot image is not clear, and the image quality is influenced.
Fig. 1 is a schematic structural diagram of a conventional periscopic camera module, and referring to fig. 1, a periscopic camera module 10 includes a reflector 11, a lens group 12 and an image sensor 13 sequentially arranged along an extending direction of an optical axis l. During specific shooting, an incident light ray d enters the periscopic camera module 10 and is transmitted to the reflecting surface of the reflector 11, an incident light ray s reflected by the reflecting surface of the reflector 11 passes through the lens group 12 and is transmitted to the image sensor 13, the image sensor 13 converts an optical signal into an electrical signal, and finally a shot image is displayed in a pixel display mode.
Wherein, the specific setting mode of the periscopic camera module 10 on the electronic equipment such as the mobile phone can be: the extending direction of the optical axis l of the periscopic camera module 10 (the direction indicated by x in fig. 1) coincides with the longitudinal direction of the mobile phone (see the direction indicated by a in fig. 3), the thickness direction of the periscopic camera module 10 (the direction indicated by z in fig. 1) coincides with the thickness direction of the mobile phone (the direction indicated by c in fig. 3), and the width direction of the periscopic camera module 10 (the direction indicated by y in fig. 1) coincides with the width direction of the mobile phone (the direction indicated by b in fig. 3).
The x direction, which is the optical axis direction of the periscopic camera module 10, is an extending direction of the central axis of the incident light ray s that is reflected by the mirror 11 and transmitted to the image sensor 13. It can be understood that the optical axis direction, i.e. the x direction, is an extending direction of the central axis of the incident light s transmitted to the image sensor 13 after being reflected by the reflector 11 when the mobile phone does not shake.
Fig. 2 is a schematic optical path diagram of the periscopic camera module shown in fig. 1 when shaking occurs. Referring to fig. 2, when a user shakes perpendicularly to the ground while holding a mobile phone to shoot, the periscopic camera module 10 may translate and shake along the x direction or rotate and shake around the y direction, for example, when the periscopic camera module 10 translates and shakes along the x direction, the object to be shot 120 translates along the x direction relative to the camera module 10, and then an incident light ray d emitted from the object to be shot 120 is reflected by a reflection surface of the mirror 11, and then a deflection with an angle of 2 × β occurs on a plane formed in the x direction and the z direction, that is, an x-z plane, for example, as shown in fig. 2, a deflection angle a of the incident light ray s reflected by the mirror 11 on the x-z plane is 2 × β, so that an image on the image sensor 13 is blurred.
As shown in fig. 2, when a user shakes parallel to the ground while holding a mobile phone to shoot, the periscopic camera module 10 may translate and shake along the y direction or rotate and shake around the optical axis l, for example, when the periscopic camera module 10 translates and shakes along the y direction, the object to be shot 120 translates along the y direction relative to the camera module 10, and then the incident light ray d emitted from the object to be shot 120 is reflected by the reflection surface of the mirror 11, and then there is a deflection with an angle of 2 α on the plane formed by the x direction and the y direction, that is, the x-y plane, for example, the angle value of the deflection angle a of the incident light ray s reflected by the mirror 11 on the x-y plane is 2 α, so that the imaging on the image sensor 13 is blurred.
For convenience of description, an angle at which the incident light ray s reflected by the reflecting mirror 11 is deflected by the shake of the camera module 10 is referred to as a shake angle of the camera module 10.
As shown in fig. 2, in order to achieve the anti-shake effect of the camera module in the mobile phone, a driving mechanism (not shown) is usually connected to the reflector 11 of the periscopic camera module 10, and the reflector 11 can be driven by the driving mechanism to rotate around the second rotation axis and the first rotation axis l respectively1And (4) rotating. Wherein the first axis of rotation l1Is the vertical axis of the mirror 11 (e.g., the axis l extending in the z' direction in FIG. 2)1). Because the angle between the reflector 11 and the thickness direction of the camera module 10 is 45 ° when the reflector is actually arranged, the angle between the vertical axis of the reflector 11 and the thickness direction of the camera module 10 is 45 °. The second axis of rotation is a horizontal axis of the reflector 11, which extends in the width direction of the camera module 10, i.e., the y direction.
When the mobile phone shakes perpendicularly to the ground, the driving mechanism can drive the reflector 11 to rotate around the second rotation axis by an angle β to compensate the shaking angle of the periscopic camera module 10, i.e. the deflection angle of the incident light s, so that the incident light s reflected by the reflector 11 is in the same direction as the light beam when the mobile phone does not shake.
Similarly, when the mobile phone shakes parallel to the ground, the driving mechanism can drive the reflector 11 to rotate around the first rotation axis l1The angle α is rotated to compensate the shaking angle of the periscopic camera module 10, i.e. the deflection angle of the incident light s, so that the incident light s reflected by the reflector 11 is consistent with the direction of the light beam when shaking does not occur, thereby playing the role of anti-shaking.
However, in the mirror 11 around the first axis of rotation l1And the second axis of rotation, the image of the object on the image sensor 13 may have a phenomenon of rotational shake around the optical axis l, i.e., an image rotation problem. The angle of rotation around the optical axis of the image of the object on the image sensor 13, i.e., the image rotation angle δ, can be expressed by the following formula (1):

it is understood that the specific generation of the rotation-like problem and the derivation of the rotation-like angle can be directly referred to the prior art, and will not be described herein.
In order to solve the image rotation problem, an electronic image rotation elimination method is adopted in the related art, for example, an image rotated around the optical rotation is subjected to edge cropping to correct the image, but the problem of imaging blur cannot be solved.
In order to ensure that an image after derotation is clear, the embodiment of the application provides an electronic device and a camera module, the second driving component is connected to an image sensor, and the second driving component can drive the image sensor to rotate around an optical axis, so that when a first reflector of the camera module rotates around a first rotating axis and a second rotating axis, the image sensor can be driven to rotate around the optical axis by a certain angle along the reverse direction of image rotation by the second driving component, the angle is consistent with an image rotation angle to offset the image rotation angle, a despinning effect is achieved, imaging of a light beam on the image sensor cannot rotate, the image finally obtained by the image sensor is ensured to be consistent with the angle of an actual object image, and meanwhile the definition of the image is also ensured.
The following describes in detail specific structures of the electronic device and the camera module provided in the embodiments of the present application.
Fig. 3 is a schematic structural diagram of an electronic device according to an embodiment of the present application. Referring to fig. 3, the electronic device 100 according to an embodiment of the present invention may include, but is not limited to, a mobile or fixed terminal with a camera function, such as a mobile phone, a tablet computer, a notebook computer, an ultra-mobile personal computer (UMPC), a handheld computer, an intercom, a netbook, a POS machine, a Personal Digital Assistant (PDA), a wearable device, and a virtual reality device.
Referring to fig. 3, the electronic device 100 may include a housing 110 and a camera module 20, the camera module 20 being disposed on the housing 110. For example, the camera module 20 is disposed on the rear cover of the housing 110. The incident light e enters the camera module 20 from the light-transmitting portion of the housing 110, and the shooting operation of the electronic device 100 is completed.
This application embodiment is through setting up above-mentioned camera module 20 on electronic equipment 100's casing 110, has not only realized camera module 20's anti-shake effect, has solved camera module 20 and has revolved the problem at the image that anti-shake in-process appears simultaneously, even make the formation of image of light beam on image sensor 24 can not take place to rotate, ensure that the image that image sensor 24 finally obtained is unanimous with the angle of actual object image, also ensured the definition of the image that electronic equipment 100 shot simultaneously.
Fig. 4 is a first structural schematic diagram of a camera module according to an embodiment of the present application. Referring to fig. 4 and 5, as an optional arrangement, a thickness direction, i.e., a c direction, of the electronic apparatus 100 according to the embodiment of the present application is consistent with a thickness direction, i.e., a z direction, of the camera module 20, and a length direction, i.e., an a direction, of the electronic apparatus 100 is consistent with an optical axis direction, i.e., an x direction, of the camera module 20, so that while a long zoom function of the camera module 20 is ensured, an occupied size of the camera module 20 in the thickness direction of the housing 110 is reduced, thereby reducing the thickness size of the electronic apparatus 100 during installation and improving an aesthetic appearance of the electronic apparatus 100.
The following specifically describes the specific structure of the camera module according to the embodiment of the present application in two scenarios.
Fig. 5 is a cross-sectional view taken along line a-a of fig. 4. Referring to fig. 4 and 5, the present embodiment provides a camera module 20, and the camera module 20 may include a first reflecting mirror 22, a lens group 23, and an image sensor 24 sequentially disposed along an extending direction of an optical axis l. As shown in fig. 5, the extending direction of the optical axis l in the embodiment of the present application specifically refers to the extending direction of the central axis of the incident light ray f after the incident light ray e is reflected by the first reflector 22. It can be understood that the optical axis l is a central axis of the incident light f reflected by the first reflector 22 and transmitted to the image sensor 24 when the camera module 20 is in a steady state, i.e., when no shake occurs. The extending direction of the optical axis l may be a central axis of the camera module 20 along the length direction.
Referring to fig. 4 and 5, in practical applications, the camera module 20 may further include a housing 21, and the first reflector 22, the lens group 23 and the image sensor 24 are all accommodated in the housing 21, so that the camera module 20 is an integral module, thereby facilitating the detachment and installation of the camera module 20 on the electronic device 100 such as a mobile phone. The housing 21 of the camera module 20 is provided with a light-transmitting area 211 for transmitting the incident light e to the first reflector 22. It is understood that the light-transmitting region 211 may be a light-transmitting hole formed in the housing 21, or may be a light-transmitting glass or the like provided on the housing 21, as long as the region of the housing 21 corresponding to the first reflector 22 is ensured to transmit light.
When the camera module 20 works, the incident light e can be transmitted to the first reflector 22 through the light-transmitting area 211 of the housing 21, the reflector surface of the first reflector 22 reflects the incident light e to the mirror group 23, the incident light f reflected by the first reflector 22 passes through the mirror group 23 and is transmitted to the image sensor 24, the image sensor 24 converts the optical signal into an electrical signal, and finally the photographed image is displayed in a pixel display mode.
Wherein a mirror group 23 is arranged between the first mirror 22 and the image sensor 24, the mirror group 23 being used to image the incident light f onto the image sensor 24, thus allowing the image sensor 24 to obtain an image of better quality. In practical applications, the lens group 23 may include a plurality of lenses spaced apart along the extending direction of the optical axis l, and the overall focal length of the lens group 23 may be changed by moving any one or more lenses of the lens group 23 along the optical axis l, so as to implement the zoom function of the camera module 20.
The image sensor 24 of the embodiment of the application may adopt a Complementary Metal-Oxide Semiconductor (CMOS) photosensitive element, or may adopt a Charge Coupled Device (CCD) photosensitive element.
In a specific arrangement, a filter 27 may be disposed between the mirror group 23 and the image sensor 24, for example, the incident light f reflected by the first reflecting mirror 22 passes through the mirror group 23 and the filter 27 in sequence, and is finally imaged on the image sensor 24. The filter 27 has the function of filtering light, for example, in black and white photography, the filter 27 can change the tone of the scene, making the taken picture more natural. In color photography, the filter 27 can change the hue of incident light, the color of the subject, and the like.
The camera module 20 of the embodiment of the present application may further include a first driving assembly 25 and a second driving assembly 26 respectively connected to the first reflecting mirror 22 and the image sensor 24. Wherein the first driving assembly 25 is used for driving the first reflector 22 to rotate around the first rotation axis and the second rotation axis respectively, and the second driving assembly 26 is used for driving the image sensor 24 to rotate around the optical axis l.
It should be noted that the first rotation axis refers to the vertical axis l of the first reflector 221The second rotation axis is a horizontal axis (not shown) of the first reflector 22, and the horizontal axis extends in the y direction, which is the width direction of the camera module 20. In practical applications, the first reflector 22 forms an angle of 45 ° with the thickness direction of the camera module 20, i.e. the z direction, and therefore the vertical axis l1A preset included angle is formed between the extending direction of the lens module 20 and the thickness direction of the camera module 20, i.e. the z direction, and the preset included angle is 45 °.
It will be appreciated that the first axis of rotation l1And the second rotation axis are both virtual rotation axes of the first reflector 22, and are not specific to the structure of the camera module 20. Wherein the extending direction of the optical axis l is perpendicular to the first rotation axis l1And the y-direction of the first plane.
Taking a mobile phone as an example, the specific setting mode of the camera module 20 provided on the mobile phone in the embodiment of the present application may be: the extending direction of the optical axis l of the camera module 20 (the direction indicated by x in fig. 5) coincides with the longitudinal direction of the cellular phone (the direction indicated by a in fig. 3), the thickness direction of the camera module 20 (the direction indicated by z in fig. 5) coincides with the thickness direction of the cellular phone (the direction indicated by c in fig. 3), and the width direction of the camera module 20 (the direction indicated by y in fig. 5) coincides with the width direction of the cellular phone (the direction indicated by b in fig. 3).
As can be seen from the above description, when a user shakes perpendicular to the ground when taking a picture with a mobile phone, the camera module 20 of the embodiment of the present application shakes horizontally along the x direction or shakes rotationally around the axis in the y direction, and the incident light e is reflected by the reflecting surface of the first reflecting mirror 22 and then deflects on the x-z plane, which is the plane formed by the x direction and the z direction, so that the image on the image sensor 24 is blurred.
When the user holds the mobile phone to shoot, the camera module 20 of the embodiment of the present application may be shifted and shaken along the y direction or may be swung around the optical axis l1Rotational jitter occurs such that the incident light e, after being reflected by the reflective surface of the first mirror 22, is deflected in the x-y plane, which is the plane formed by the x-direction and the y-direction, thereby causing blurring of the image formed on the image sensor 24.
For convenience of description, the embodiment of the present application uses an angle at which the incident light beam f reflected by the first reflecting mirror 22 is deflected by the shake of the camera module 10 as the shake angle of the camera module 20.
In order to achieve the anti-shake effect of the camera module 20 according to the embodiment of the present application, the first driving assembly 25 can drive the first reflector 22 to rotate around the second rotation axis and the first rotation axis l respectively1Rotate to compensate the shake angle of the camera module 20 when the mobile phone shakes perpendicular to the ground and parallel to the ground. For example, when the mobile phone shakes perpendicularly to the ground, the camera module 20 can move horizontally and shake along the extending direction of the optical axis l, and the first driving component 25 can drive the first reflector 22 to rotate around the second rotation axis by a certain angle, so as to offset the deflection angle of the incident light f relative to the optical axis l when the camera module 20 shakes, and make the incident light f reflected by the first reflector 22 consistent with the beam direction when the camera module does not shake.
Similarly, when the mobile phone shakes parallel to the ground, the camera module 20 can shake with the mobile phone in a y direction, i.e. a width direction, or shake with the mobile phone in a rotating manner around the optical axis l, and the first driving component can be used for driving the mobile phone to shake25 drive the first mirror 22 about the first axis of rotation l1The first reflector 22 is rotated by a certain angle to offset the deflection angle of the incident light f relative to the optical axis l when the camera module 20 shakes, so that the direction of the light beam reflected by the first reflector is the same as that of the light beam when the camera module does not shake, thereby playing a role in anti-shake.
The first reflector 22 may be an existing reflector plate or a reflector prism.
The first driving assembly 25 may include any one of an electrostatic type micro-actuator, a magneto-electric type micro-actuator, a piezoelectric type micro-actuator, a shape memory alloy type micro-actuator, and a thermoelectric type micro-actuator.
For example, the first driving component 25 is a magneto-electric micro-driver, which includes a magnetic field and a conductor, wherein when the magnetic field moves relative to the conductor, the conductor generates an induced current, and the induced current makes the conductor subject to an ampere force, so that the conductor moves, and the conductor is a component of the magneto-electric micro-driver, which drives the first reflector 22 to rotate.
For another example, the first driving component 25 is a piezoelectric micro-driver, which is based on the reverse electric effect of the piezoelectric ceramic material, and when a voltage is applied to the piezoelectric material, a mechanical stress is generated, i.e., the electric energy and the mechanical energy are converted, and the mechanical deformation is controlled, so as to drive the first reflector 22 to rotate.
It should be noted that the structure and operation principle of the electrostatic micro-actuator, the magneto-electric micro-actuator, the piezoelectric micro-actuator, the shape memory alloy micro-actuator and the thermoelectric micro-actuator can be directly referred to the prior art, and are not described herein again.
Fig. 6 is a schematic diagram of a second internal structure of the camera module according to the embodiment of the present application. Referring to fig. 6, in order to simplify the structure of the camera module 20, the first reflecting mirror 22 and the first driving assembly 25 according to the embodiment of the present disclosure may be configured as an integrated Micro Electro Mechanical Systems (MEMS) micro mirror, i.e., a MEMS micro mirror 22 a. The MEMS micro-mirror 22a is fabricated by integrated circuit technology. The arrangement of the MEMS micro-mirror 22a not only saves the occupied space of the first driving component 25 and the first reflecting mirror 22 in the camera module 20, but also the MEMS micro-mirror 22a has light weight, thereby facilitating the dual-axis large-angle rotation of the first reflecting mirror 22, and further satisfying the large-angle anti-shake effect of the camera module 20 and the electronic device 100.
In practical applications, the first reflector 22 rotates around the first rotation axis l of the camera module 201And the second rotation axis, the image of the object on the image sensor 24 may have a phenomenon of rotational shake around the optical axis l, i.e., an image rotation problem. The angle at which the image of the subject on the image sensor 24 is rotated around the optical axis l is referred to as a derotation angle.
In order to solve the image rotation problem, in the embodiment of the present application, the second driving component 26 may drive the image sensor 24 to rotate a certain angle around the optical axis l along the reverse direction of the imaging rotation, and an angle value of the derotation angle is consistent with an angle value of the image rotation to offset the image rotation angle, so as to perform a derotation function, so that the imaging of the light beam on the image sensor 24 does not rotate, ensure that the angle of the image finally obtained by the image sensor 24 is consistent with that of the actual object, and simultaneously ensure the definition of the image.
Based on the above, the embodiment of the present application adopts a physical anti-shake manner, that is, the image sensor 24 is rotated around the optical axis l to offset the angle of the imaging rotating and shaking around the optical axis l, so that not only the definition of the shot image and the angle consistency with the actual shot object are ensured, but also the operation procedure of the rotation-eliminating process is simplified, and the rotation-eliminating efficiency of the camera module 20 of the embodiment of the present application is improved.
The second driving assembly 26 may include any one of an electrostatic micro-actuator, a magneto-electric micro-actuator, a piezoelectric micro-actuator, a shape memory alloy micro-actuator, and a thermoelectric micro-actuator, so that the first driving assembly 25 and the second driving assembly 26 are more flexibly disposed.
For example, the second driving assembly 26 is an electrostatic micro-actuator. Taking the electrostatic cantilever actuator as an example, the second driving assembly 26 includes a fixed plate and a movable plate, which are oppositely disposed, the fixed plate is generally referred to as a stator of the electrostatic microactuator, and the movable plate is referred to as a mover of the electrostatic microactuator.
Wherein, the stator can be connected to the housing 21 of the camera module 20, the mover is connected to the image sensor 24, a gap is formed between the stator and the mover, and the stator and the mover are connected through the elastic cantilever. When the image sensor works, different linear voltage values are applied to the two ends of the stator and the rotor respectively, the electrostatic force attracted between the stator and the rotor is obtained through the voltage difference, and when the electrostatic force reaches the action required by the movement of the elastic cantilever, the rotor rotates around the optical axis l relative to the stator under the action of the electrostatic force, so that the image sensor 24 is driven to rotate around the optical axis l. The structure and operation principle of the electrostatic microactuator can be directly referred to the prior art, and will not be described herein.
In the embodiment of the present application, the second driving assembly 26 is configured as an electrostatic micro-driver, so as to simplify the structure of the second driving assembly 26, and meanwhile, the second driving assembly 26 is more convenient to operate, and in addition, the control precision of the second driving assembly 26 on the image sensor 24 is also improved, and the second driving assembly 26 also has the characteristics of high efficiency, low heat generation, low power consumption and high response speed.
It is understood that the second driving assembly 26 may correspond to the first driving assembly 25, for example, the second driving assembly 26 and the first driving assembly 25 may both adopt an electrostatic micro-driver. Of course, in other examples, the second driving assembly 26 may also adopt a different type of driving structure from the first driving assembly 25, for example, the first driving assembly 25 adopts an electrostatic micro-driver, and the second driving assembly 26 adopts a piezoelectric micro-driver.
As is apparent from the above description, the second driving unit 26 includes a fixed portion connected to a member that does not move relative to the housing 21 of the camera module 20, and a movable portion connected to the image sensor 24. The movable part rotates the image sensor 24 by electrostatic force or the like between the fixed part and the movable part. For example, the stator of the electrostatic microactuator may be used as the stationary portion, and the mover of the electrostatic microactuator may be used as the movable portion.
Fig. 7 is a cross-sectional view taken along line B-B of fig. 5. Referring to fig. 5 and 7, the camera module 20 according to the embodiment of the present disclosure further includes a Flexible Printed Circuit (FPC) 28.
In particular, during assembly, the movable portion of the second driving assembly 26 is connected to the image sensor 24, and the fixed portion of the second driving assembly 26 is connected to the flexible circuit board 28. The flexible circuit board 28 includes two opposite surfaces, and the fixing portion of the second driving assembly 26 is connected to one of the surfaces of the flexible circuit board 28, so as to enhance the structural stability of the second driving assembly 26.
In some examples, the fixing portion of the second driving assembly 26 may be fixed on the flexible circuit board 28 by bonding, so that the connection structure between the fixing portion of the second driving assembly 26 and the flexible circuit board 28 is simplified while the connection strength between the fixing portion of the second driving assembly 26 and the flexible circuit board 28 is ensured, thereby improving the assembly efficiency between the second driving assembly 26 and the flexible circuit board 28. Of course, in other examples, the fixing portion of the second driving assembly 26 may be detachably fixed on the flexible circuit board 28 by bolts or the like, so as to facilitate the detachment of the second driving assembly 26.
Also, the movable portion of the second driving assembly 26 may be fixed to the image sensor 24 by means of adhesion, so that the connection structure between the movable portion of the second driving assembly 26 and the image sensor 24 is simplified while the connection strength between the movable portion of the second driving assembly 26 and the image sensor 24 is ensured, thereby improving the assembly efficiency between the second driving assembly 26 and the image sensor 24.
Referring to fig. 5, the second driving assemblies 26 and the flexible circuit board 28 may be disposed in the extending direction of the optical axis l when they are assembled, and the second driving assemblies 26 are disposed on the side of the image sensor 24 away from the mirror group 23, so as to avoid blocking of incident light by the second driving assemblies 26 and the flexible circuit board 28. The second driving assembly 26 is located between the image sensor 24 and the flexible circuit board 28 so that the fixed portion and the movable portion of the second driving assembly 26 are connected to the flexible circuit board 28 and the image sensor 24, respectively.
The embodiment of the present application, by connecting the movable portion of the second driving component 26 to the image sensor 24 and connecting the fixed portion of the second driving component 26 to the flexible circuit board 28, ensures the normal driving of the movable portion of the second driving component 26 to the image sensor 24, and improves the assembly stability of the fixed portion of the second driving component 26.
The embodiment of the present application sets up through the extending direction with second drive assembly 26 and flexible circuit board 28 along optical axis l to avoid second drive assembly 26 and flexible circuit board 28 to occupy the thickness direction of camera module 20 and be the space of z direction, thereby reduced camera module 20's thickness size.
In practical applications, the thickness direction of the camera module 20 is the same as the thickness direction c of the electronic device 100 such as a mobile phone, and the above arrangement effectively reduces the occupied size of the camera module 20 in the thickness direction of the electronic device 100 such as a mobile phone, so that the thickness of the electronic device 100 such as a mobile phone can be reduced, and the aesthetic appearance of the electronic device 100 can be improved. In another aspect, the camera module 20 reduces the size of the electronic device 100 such as a mobile phone in the thickness direction, so as to provide a suitable space for installing other components in the electronic device 100.
In other examples, the second driving assembly 26 and the flexible circuit board 28 may also be disposed in the y direction perpendicular to the optical axis l, i.e., the width direction of the camera module 20, for example, the second driving assembly 26 and the flexible circuit board 28 are disposed on the side of the image sensor 24 disposed in the y direction, i.e., the width direction, so that the second driving assembly 26 and the flexible circuit board 28 can also be prevented from occupying the space in the z direction, i.e., the thickness direction, of the camera module 20.
In one possible implementation, the dimension of the second driving assembly 26 in the z-direction, i.e., the thickness direction of the camera module 20, may be equal to or smaller than the dimension of the image sensor 24 in the z-direction, so as to ensure that the second driving assembly 26 is disposed without increasing the thickness dimension of the camera module 20.
Referring to fig. 7, to ensure that the image sensor 24 operates properly, the image sensor 24 may be electrically connected to a flexible circuit board 28. In practical applications, one end of the flexible circuit board 28 is electrically connected to a power source, such as a battery, of the electronic device 100, such as a mobile phone. By electrically connecting the image sensor 24 to the flexible circuit board 28, power can be supplied to the image sensor 24 through the flexible circuit board 28, thereby ensuring that the image sensor 24 operates properly.
For example, pins such as copper pillars are provided on the image sensor 24, insertion holes corresponding to the pins are provided on the flexible circuit board 28, and the pins of the image sensor 24 are inserted into the insertion holes of the flexible circuit board 28, so that the image sensor 24 and the flexible circuit board 28 are electrically connected.
As another example, a lead 241 may be provided between the image sensor 24 and the flexible circuit board 28. Specifically, one end of the lead 241 is electrically connected to the image sensor 24, and the other end of the lead 241 is electrically connected to the flexible circuit board 28, so that the image sensor 24 is electrically connected to the flexible circuit board 28 through the lead 241. For example, one end of the lead 241 may be connected to two opposite sides of the image sensor 24 in the thickness direction of the camera module 20, and the other end of the lead 241 is led out from two opposite sides of the image sensor 24 in the thickness direction of the camera module 20 and connected to the flexible circuit board 28.
When the image sensor 24 of the embodiment of the present application rotates around the optical axis l, the lead 241 is subjected to a certain tensile force. In order to prevent the lead 241 from being subjected to stress concentration due to the action of a pulling force during the rotation of the image sensor 24, the embodiment of the present application may set the length of the lead 241 to be greater than the vertical distance between the image sensor 24 and the flexible circuit board 28, so that the lead 241 has a redundant portion between the image sensor 24 and the flexible circuit board 28, so as to ensure that the lead 241 can have a certain moving range during the rotation of the image sensor 24, and thus, the lead 241 is prevented from being damaged or even broken due to the stress concentration under the pulling of the image sensor 24.
In particular, the length of the lead 241 may be 2mm to 4mm, so that the lead 241 is not occupied by an excessive space in the camera module 20 while the image sensor 24 is not damaged in the rotation process. For example, the length of the lead 241 may be 2mm, 2.5mm, 3mm, 3.4mm, 3.7mm, or 4mm, which is a suitable value.
In some examples, a plurality of leads 241 may be disposed between the image sensor 24 and the flexible circuit board 28 to implement transmission of various functional signals between the image sensor 24 and the flexible circuit board 28, so as to enrich the signal transmission types between the image sensor 24 and an external device, and further enrich the functions of the camera module 20.
For example, the flexible circuit board 28 is electrically connected to a functional device such as an external memory module, and the image sensor 24 is electrically connected to the flexible circuit board 28 through one of the leads 241, so that the image sensor 24 is electrically connected to the external memory module through the flexible circuit board 28, and the image obtained by the image sensor 24 is stored in the memory module.
When specifically setting up, a plurality of lead wires 241 can set up respectively at image sensor 24 along the y direction both ends that the relative setting of width direction of camera module 20 promptly, and a plurality of lead wires 241 set up along the thickness direction interval of camera module 20, set up like this and avoided lead wire 241 to occupy the space in the thickness direction of camera module 20 to this camera module 20's thickness size has been reduced.
An insulating layer (not shown) may be wrapped around an outer surface of each lead 241 to prevent a short circuit between two adjacent leads 241. When the insulating layer is specifically manufactured, the insulating layer can be made of polyvinyl chloride, polyethylene, polyvinyl acetal and other materials.
Referring to fig. 5, in the embodiment of the present application, a space (as indicated by h in fig. 5) is provided between two side walls of the camera module 20 disposed along the z direction and the image sensor 24, for example, a space h is provided between two side walls of the housing 21 of the camera module 20 disposed along the z direction and the image sensor 24, so as to reserve a moving space for the rotation of the image sensor 24 around the optical axis l, and ensure that the image sensor 24 does not collide with two side walls of the camera module 20 along the thickness direction, for example, an inner wall of the housing 21, when rotating around the optical axis l.
For example, when the image sensor 24 is an image sensor of an IMX520 model, the width of the gap h is at least 0.5mm, i.e., at least 0.5mm of active space can be reserved between the two sidewalls of the camera module 20 disposed along the z-direction and the image sensor 24.
In order to maintain the thickness of the camera module 20, a groove (not shown) may be formed on an inner wall of the housing 21 facing the image sensor 24 in the z direction to increase the distance between the inner wall of the housing 21 and the image sensor 24, so as to reserve a space for the rotation of the image sensor 24.
Fig. 8 is a partial structural schematic diagram of a third structure of the camera module according to the embodiment of the present application. Referring to fig. 5 and 8, the camera module 20 according to the embodiment of the present disclosure may further include a control module 30 and a detection module 29, where the control module 30 is in signal connection with the detection module 29, the first driving assembly 25 and the second driving assembly 26, respectively.
The detecting module 29 may be a gyroscope, which is used to detect and output the shake angle of the camera module 20. The control module 30 may be a Micro Controller Unit (MCU), and is configured to receive the dithering angle output by the detection module 29, and the control module 30 controls the first driving assembly 25 to operate according to the dithering angle to drive the first mirrors 22 to rotate around the first rotation axes l respectively1And a second axis of rotation. Meanwhile, the control module 30 controls the second driving component 26 to drive the image sensor 24 to rotate around the optical axis l according to the shaking angle.
As further shown in fig. 8, the first driving assembly 25 and the second driving assembly 26 are further used for outputting the rotation angles of the first mirror 22 and the image sensor 24, respectively. The control module 30 is further configured to receive the rotation angles of the first reflecting mirror 22 and the image sensor 24, so as to control the first driving assembly 25 and the second driving assembly 26 to stop working when the rotation angles of the first reflecting mirror 22 and the image sensor 24 reach the anti-shake angle value and the despin angle value, respectively.
Taking the second driving assembly 26 as an example, the movable angle of the movable portion of the second driving assembly 26 has a corresponding relationship with the rotation angle of the image sensor 24, and the movable angle of the movable portion of the second driving assembly 26 can be directly fed back to the control module 30, for example, an angle sensor is disposed on the second driving assembly 26 and feeds back the movable angle of the movable portion to the control module 30, so that the control module 30 can obtain the rotation angle of the image sensor 24 according to the movable angle of the movable portion.
In addition, since the movable angle of the movable portion of the second driving assembly 26 has a corresponding relationship with the current or voltage intensity applied to the second driving assembly 26, in some examples, the current or voltage intensity on the second driving assembly 26 may also be fed back to the control module 30. For example, when the second driving assembly 26 is an electrostatic microactuator, the relative displacement between the mover and the stator corresponds to the electrostatic attraction between the mover and the stator, and the relative displacement between the mover and the stator corresponds to the rotation angle of the image sensor 24. During operation, the relative displacement between the mover and the stator may be directly fed back to the control module 30 through the angle sensor, or the electrostatic attraction between the mover and the stator may be fed back to the control module 30, so that the control module 30 obtains the rotation angle of the image sensor 24 in real time.
It is understood that the relationship between the relative displacement between the mover and the stator of the electrostatic microactuator and the electrostatic attraction between the mover and the stator, and the relationship between the relative displacement between the mover and the stator and the rotation angle of the image sensor 24 can be directly referred to the conventional electrostatic microactuator, and will not be described herein.
It should be noted that the anti-shake angle value of the first reflector 22 in the embodiment of the present application is half of the deflection angle of the incident light f when the camera module 20 shakes. The despin angle value of the image sensor 24 is equal to the angle value of the rotation of the image on the image sensor 24 about the optical axis l, and in the opposite direction. Wherein, the relationship between the anti-shake angle value and the despin angle value can be directly referred to the above formula (1). The relationship between the deflection angle value and the anti-shake angle value of the incident light f, the relationship between the image rotation angle value and the despin angle value of the image sensor 24, and the logical relationship between the anti-shake angle value and the despin angle value are all pre-stored in the control module 30.
According to the formula (1), the control module 30 drives the first driving assembly 25 and the second driving assembly 26 simultaneously, so that the first driving assembly 25 and the second driving assembly 26 can work in time and simultaneously when the camera module 20 shakes, the first reflector 22 and the image sensor 24 can rotate simultaneously according to the deflection angle of the incident light f, synchronous working of anti-shaking and despinning is achieved, and anti-shaking and despinning efficiency of the camera module 20 is improved.
In addition, the first driving assembly 25 and the second driving assembly 26 can feed back the rotation angle to the control module 30 in real time, so that the detection module 29, the control module 30, and the first driving assembly 25 and the second driving assembly 26 form closed-loop control, and the control module 30 can timely and accurately control the first driving assembly 25 and the second driving assembly 26 to stop working when the rotation angle reaches the anti-shake angle value and the rotation-rotation angle value, thereby improving the anti-shake and rotation-rotation precision of the camera module 20.
In order to improve the signal feedback efficiency between the first driving assembly 25 and the second driving assembly 26 and the control module 30, the camera module 20 of the embodiment of the present application further includes two capacitive feedback modules 31.
Two ends of one of the two capacitive feedback modules 31 are respectively in signal connection with the first driving assembly 25 and the control module 30, so as to feed back a driving signal of the first driving assembly 25 to the control module 30; wherein, the driving signal of the first driving assembly 25 corresponds to the rotation angle of the first reflecting mirror 22.
It is understood that the driving signal of the first driving assembly 25 may be a rotation angle of the first driving assembly 25, and may also be a current intensity or a voltage intensity applied to the first driving assembly 25. During operation, a driving signal of the first driving assembly 25 is fed back to the control module 30 through the capacitance feedback circuit of the capacitance feedback module 31, so that the control module 30 can timely and accurately acquire the driving signal of the first reflector 22 around the first rotation axis l1And the angle of rotation of the second axis of rotation.
Two ends of the other of the two capacitive feedback modules 31 are respectively in signal connection with the second driving assembly 26 and the control module 30, so as to feed back the driving signal of the second driving assembly 26 to the control module 30. Wherein, the driving signal of the second driving assembly 26 corresponds to the rotation angle of the image sensor 24.
It is understood that the driving signal of the second driving assembly 26 may be a rotation angle of the second driving assembly 26, and may also be a current intensity or a voltage intensity applied to the second driving assembly 26. During operation, a driving signal of the second driving assembly 26 is fed back to the control module 30 through the capacitance feedback circuit of the capacitance feedback module 31, so that the control module 30 can timely and accurately acquire the rotation angle of the image sensor 24 around the optical axis l.
This application embodiment is through equal signal connection capacitance feedback module 31 between first drive assembly 25 and control module 30 and between second drive assembly 26 and control module 30, with accurate and timely feedback to control module 30 of drive signal with first drive assembly 25, simultaneously with accurate and timely feedback to control module 30 of drive signal of second drive assembly 26, thereby the anti-shake efficiency and the despinning efficiency of camera module 20 have been improved, improve camera module 20's anti-shake and despinning precision simultaneously, thereby the definition of the image that camera module 20 shot has been improved.
The capacitive feedback module 31 may directly use an existing capacitive feedback resonator. The circuit and operation principle of the capacitive feedback module 31 can be directly referred to the related contents of the existing capacitive feedback resonator.
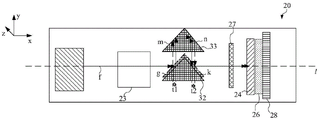
Fig. 9 is a fourth schematic structural diagram of the camera module according to the embodiment of the present application. Referring to fig. 9, the camera module 20 may further include a second reflecting mirror 32 and a third reflecting mirror 33.
Wherein the second mirror 32 and the third mirror 33 are located between the image sensor 24 and the first mirror 22, for example, the second mirror 32 and the third mirror 33 may be disposed between the mirror group 23 and the image sensor 24. The second reflecting mirror 32 is located in the extending direction of the optical axis l, and the third reflecting mirror 33 is disposed opposite to the second reflecting mirror 32 in the width direction of the camera module 20, i.e., the y direction, for example, the third reflecting mirror 33 is disposed above the second reflecting mirror 32 in the y direction.
The second reflector 32 is used for reflecting the light reflected by the first reflector 22 to the third reflector 33, and reflecting the light reflected by the third reflector 33 to the image sensor 24. For example, when the camera module 20 is specifically operated, the incident light e is transmitted to the first reflector 22 through the transparent region 211 of the housing 21, is reflected by the first reflector 22, then is transmitted to the second reflector 32 through the lens assembly 23, the second reflector 32 continuously reflects the incident light f to one of the reflective surfaces of the third reflector 33, then is reflected to the second reflector 32 from the other reflective surface of the third reflector 33, and finally is reflected to the image sensor 24 through the second reflector 32.
In a specific configuration, the second reflecting mirror 32 is a total reflection mirror, for example, the second reflecting mirror 32 is a total reflection prism, that is, the second reflecting mirror 32 is a light-tight prism, so as to ensure that the light transmitted from the mirror group 23 to one of the reflecting surfaces of the second reflecting mirror 32 can be completely reflected to the third reflecting mirror 33, and the light reflected from the third reflecting mirror 33 to the other reflecting surface of the second reflecting mirror 32 can be completely reflected to the image sensor 24, and cannot enter the second reflecting mirror 32, which affects normal transmission of the light.
For example, the second reflector 32 may be a total reflection prism, and the second reflector 32 includes two reflecting mirror surfaces having an included angle therebetween and facing the mirror group 23 and the image sensor 24, respectively. As shown in fig. 9, for convenience of description, the reflecting mirror surface facing the mirror group 23 is used as a second reflecting mirror surface g for reflecting the incident light f transmitted by the mirror group 23 to the third reflecting mirror 32, and the reflecting mirror surface facing the image sensor 24 is used as a second reflecting mirror surface k for reflecting the incident light f reflected by the third reflecting mirror 32 to the image sensor 24.
In some examples, the second reflector 32 may also be composed of two reflecting mirrors with an included angle, and the embodiment of the present application is not limited to the specific structure of the second reflector 32.
As shown in fig. 9, the third reflector 33 of the embodiment of the present application is a half-mirror prism, wherein the mirror surface of the third reflector 33 facing the second reflector 32 is a transparent mirror surface, and the other surface of the third reflector is a reflective surface, and the interior of the third reflector is transparent, so that the incident light f reflected from the second reflector 32 to the third reflector 33 can penetrate into the third reflector 33 from the transparent mirror surface at the bottom and be transmitted to one of the reflective surfaces of the third reflector 33, the incident light f transmitted to the reflective surface can be transmitted to the other reflective surface through the interior of the third reflector 33 after being reflected by the reflective surface, and the incident light f is transmitted to the reflective surface of the second reflector 32 facing the image sensor 24 after being reflected by the other reflective surface and passing through the transparent mirror surface at the bottom of the third reflector 33.
In a specific arrangement, the third reflector 33 may be a semi-transparent semi-reflective triangular prism, for example, the third reflector 33 includes two reflecting mirror surfaces, i.e. a second reflecting mirror surface g and a second reflecting mirror surface k, which have an included angle and face the second reflector 32, respectively, and a bottom mirror surface facing the second reflector 32 is disposed between the two reflecting mirror surfaces. Wherein the bottom mirror surface is a transparent mirror, so that the incident light f is reflected from the second reflector 32 to the third reflector 33.
For convenience of description, the reflecting mirror surface facing the second reflecting mirror surface g is used as the third reflecting mirror surface m, and the reflecting mirror surface facing the second reflecting mirror surface k is used as the third reflecting mirror surface n, during specific shooting, the incident light f reflected from the second reflecting mirror surface g is transmitted to the third reflecting mirror surface m through the bottom mirror surface, then the third reflecting mirror surface m reflects the incident light f to the third reflecting mirror surface n, and the third reflecting mirror surface n reflects the incident light f reflected from the third reflecting mirror surface m and then transmits the reflected incident light f to the second reflecting mirror surface k through the bottom mirror surface.
In some examples, the third reflector 33 may also be composed of two reflecting mirrors with an included angle, and the two reflecting mirrors face the second reflecting mirror surface g and the second reflecting mirror surface k, respectively, and the embodiment of the present application does not limit the specific structure of the third reflector 33.
In the embodiment of the present application, the first reflector 22, the second reflector 32, and the third reflector 33 are arranged to realize three times of bending of incident light, so that the size of the camera module 20 in the thickness direction and the extending direction of the optical axis l is reduced while the image distance of the camera module 20 is increased.
With continued reference to fig. 9, in some examples, a third driving assembly 34 may be connected to the second mirror 32 or the third mirror 33, and the third driving assembly 34 is used to drive the second mirror 32 or the third mirror 33 to move along the y direction so as to change the focal length of the camera module 20.
Fig. 10 is a schematic diagram of the optical path of fig. 9 after the second mirror has been moved. Referring to fig. 9 and 10, taking the example of connecting the third driving assembly 34 to the second reflecting mirror 32 as an example, the third driving assembly 34 can drive the second reflecting mirror 32 to move toward or away from the third reflecting mirror 33, so as to shorten or lengthen the horizontal distance of the incident light f transmitted from the first reflecting mirror 22 to the image sensor 24, thereby achieving the adjustment of the focal length of the camera module 20.
Referring to fig. 10, for example, the third driving assembly 34 drives the second reflecting mirror 32 to move away from the third reflecting mirror 33 along the y direction, so that the incident light e transmitted from the mirror group 23 is reflected by the second reflecting mirror 32 and the two sides of the third reflecting mirror 33 to form an incident light f, which is extended by a distance of t1+ t2 in the extending direction of the optical axis l, that is, the horizontal distance of the incident light f transmitted from the first reflecting mirror 22 to the image sensor 24 is extended by t1+ t2, thereby increasing the focal length of the camera module 20.
The third driving assembly 34 may include any one of an electrostatic micro-actuator, a magneto-electric micro-actuator, a piezoelectric micro-actuator, a shape memory alloy micro-actuator, and a thermoelectric micro-actuator. Of course, the third driving assembly 34, the first driving assembly 25 and the second driving assembly 26 can all adopt the same driving structure, so as to simplify the assembling process of the camera module.
This application embodiment is through setting up second reflector 32 and third reflector 33 between image sensor 24 and first reflector 22, and through set up third drive assembly 34 on second reflector 32 or third reflector 33, make this second reflector 32 and third reflector 33 can move along the y direction towards each other or keep away from each other, like this, when realizing the adjustment to the focus of camera module 20, occupation space when having practiced thrift second reflector 32 and third reflector 33 and having removed in the extending direction of z direction and optical axis l, thereby the length size and the thickness size of camera module 20 have been reduced.
In the description of the embodiments of the present application, it should be noted that unless otherwise explicitly stated or limited, the terms "mounted," "connected," and "connected" are to be construed broadly, and may be, for example, a fixed connection, an indirect connection via an intermediary, a connection between two elements, or an interaction between two elements. The specific meanings of the above terms in the embodiments of the present application can be understood by those of ordinary skill in the art according to specific situations.
The terms "first," "second," "third," "fourth," and the like in the description and in the claims of the embodiments of the application and in the drawings described above, if any, are used for distinguishing between similar elements and not necessarily for describing a particular sequential or chronological order.
Claims (15)
1. A camera module is characterized by comprising a first reflector, a lens group and an image sensor which are sequentially arranged along the extension direction of an optical axis;
the camera module further comprises a first driving assembly and a second driving assembly which are respectively connected to the first reflector and the image sensor; the first driving assembly is used for driving the first reflector to rotate around a first rotating axis and a second rotating axis respectively, and the second driving assembly is used for driving the image sensor to rotate around the optical axis;
the optical axis is the central axis of incident light after being reflected by the first reflector, the first rotating axis is the vertical axis of the first reflector, a preset included angle is formed between the extending direction of the first rotating axis and the thickness direction of the camera module, the second rotating axis is the horizontal axis of the first reflector, and the extending direction of the second rotating axis is consistent with the width direction of the camera module.
2. The camera module of claim 1, further comprising a flexible circuit board;
the second driving assembly comprises a movable part and a fixed part, the movable part of the second driving assembly is connected to the image sensor, and the fixed part of the second driving assembly is connected to the flexible circuit board; the second driving assembly and the flexible circuit board are arranged in the extending direction of the optical axis, the second driving assembly and the flexible circuit board are located on one side, away from the mirror group, of the image sensor, and the second driving assembly is located between the image sensor and the flexible circuit board.
3. The camera module according to claim 2, wherein the second driving assembly comprises an electrostatic micro-actuator, a stator of the electrostatic micro-actuator is the fixed portion of the second driving assembly, and a mover of the electrostatic micro-actuator is the movable portion of the second driving assembly.
4. The camera module according to claim 2, wherein the image sensor is electrically connected to the flexible circuit board by a lead;
the length of the lead is greater than the vertical distance between the image sensor and the flexible circuit board.
5. The camera module according to claim 4, wherein the image sensor is provided with a plurality of leads respectively at two ends thereof which are opposite to each other in a width direction of the camera module, and the leads are spaced apart from each other in a thickness direction of the camera module.
6. The camera module of claim 5, wherein an outer surface of each of the leads is coated with an insulating layer.
7. The camera module according to any one of claims 1 to 6, further comprising a control module and a detection module, wherein the control module is in signal connection with the detection module, the first driving assembly and the second driving assembly, respectively;
the detection module is used for detecting and outputting the shaking angle of the camera module; the control module is used for receiving the shaking angle, controlling the first driving assembly to drive the first reflector to rotate around a first rotating axis and a second rotating axis respectively according to the shaking angle, and controlling the second driving assembly to drive the image sensor to rotate around an optical axis;
the first driving assembly and the second driving assembly are further used for outputting rotation angles of the first reflecting mirror and the image sensor respectively; the control module is further configured to receive rotation angles of the first mirror and the image sensor, and control the first driving assembly and the second driving assembly to stop working when the rotation angles of the first mirror and the image sensor respectively reach an anti-shake angle value and a despin angle value.
8. The camera module of claim 7, further comprising two capacitive feedback modules;
two ends of one of the two capacitance feedback modules are respectively in signal connection with the first driving assembly and the control module so as to feed back a driving signal of the first driving assembly to the control module; wherein a driving signal of the first driving assembly corresponds to a rotation angle of the first mirror;
two ends of the other of the two capacitance feedback modules are respectively in signal connection with the second driving assembly and the control module so as to feed back a driving signal of the second driving assembly to the control module; wherein the driving signal of the second driving assembly corresponds to a rotation angle of the image sensor.
9. The camera module of any one of claims 1-8, wherein a dimension of the second drive assembly in a thickness direction of the camera module is equal to or less than a dimension of the image sensor in the thickness direction of the camera module.
10. The camera module according to any one of claims 1 to 9, wherein two side walls of the camera module arranged in a thickness direction have a space from the image sensor.
11. The camera module of any one of claims 1-10, further comprising a second mirror and a third mirror;
the second reflector and the third reflector are located between the image sensor and the first reflector, the second reflector is located in the extending direction of the optical axis, the third reflector is arranged along the width direction of the camera module and opposite to the second reflector, and the second reflector is used for reflecting light to the third reflector and reflecting the light reflected back by the third reflector to the image sensor.
12. The camera module of claim 11, further comprising a third driving assembly connected to the second reflector or the third reflector, wherein the third driving assembly is configured to drive the second reflector or the third reflector to move along a width direction of the camera module, so as to change a focal length of the camera module.
13. The camera module of any one of claims 1-12, wherein the first drive assembly and the first mirror are configured as an integrated MEMS micro-mirror.
14. The camera module according to any one of claims 1 to 13, wherein the first driving element comprises any one of an electrostatic micro-actuator, a magneto-electric micro-actuator, a piezoelectric micro-actuator, a shape memory alloy micro-actuator, and a thermoelectric micro-actuator.
15. An electronic device comprising a housing and the camera module of any one of claims 1-14; the camera module is arranged on the shell.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010460779.0A CN113747001B (en) | 2020-05-27 | 2020-05-27 | Electronic equipment and camera module |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010460779.0A CN113747001B (en) | 2020-05-27 | 2020-05-27 | Electronic equipment and camera module |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113747001A true CN113747001A (en) | 2021-12-03 |
| CN113747001B CN113747001B (en) | 2022-11-04 |
Family
ID=78723727
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010460779.0A Active CN113747001B (en) | 2020-05-27 | 2020-05-27 | Electronic equipment and camera module |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113747001B (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115396574A (en) * | 2022-08-18 | 2022-11-25 | Oppo广东移动通信有限公司 | Lens module and electronic equipment |
| CN117135454A (en) * | 2023-01-13 | 2023-11-28 | 荣耀终端有限公司 | Image processing method, device and storage medium |
Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6130993A (en) * | 1998-04-20 | 2000-10-10 | Asahi Kogaku Kogyo Kabushiki Kaisha | Camera having an image stabilizer |
| US20040141065A1 (en) * | 2003-01-17 | 2004-07-22 | Minolta Co., Ltd. | Image taking device with bent optical system |
| CN1847970A (en) * | 2005-04-15 | 2006-10-18 | 鸿富锦精密工业(深圳)有限公司 | Camera possessing hand vibration preventor |
| US20100245603A1 (en) * | 2007-11-09 | 2010-09-30 | Panasonic Corporation | Camera, camera system, and camera body |
| US20140267809A1 (en) * | 2013-03-12 | 2014-09-18 | Canon Kabushiki Kaisha | Imaging apparatus and control method therefor |
| US20140362242A1 (en) * | 2012-11-16 | 2014-12-11 | Panasonic Intellectual Property Corporation Of America | Camera drive device |
| US20150229843A1 (en) * | 2012-10-31 | 2015-08-13 | Fujifilm Corporation | Camera module having anti-shake mechanism |
| CN106405991A (en) * | 2016-11-29 | 2017-02-15 | 深圳市世尊科技有限公司 | Periscopic camera shooting module and reflector apparatus used for the periscopic camera shooting module |
| CN107515459A (en) * | 2016-06-17 | 2017-12-26 | 宁波舜宇光电信息有限公司 | Periscopic camera module and its imaging method |
| CN109905581A (en) * | 2019-03-21 | 2019-06-18 | Oppo广东移动通信有限公司 | Imaging modules, CCD camera assembly and electronic device |
| CN110505370A (en) * | 2018-05-16 | 2019-11-26 | 宁波舜宇光电信息有限公司 | Light steering assembly and its manufacturing method and periscopic camera module, periscopic array mould group and electronic equipment |
| CN110730285A (en) * | 2019-10-14 | 2020-01-24 | Oppo广东移动通信有限公司 | Camera module and terminal equipment |
| CN110879454A (en) * | 2019-12-25 | 2020-03-13 | Oppo广东移动通信有限公司 | Camera module, periscopic camera module, camera assembly and electronic device |
| CN110913096A (en) * | 2019-05-05 | 2020-03-24 | 华为技术有限公司 | Camera module and electronic equipment |
| CN111131683A (en) * | 2020-01-14 | 2020-05-08 | 南昌欧菲光电技术有限公司 | Camera module and electronic device |
-
2020
- 2020-05-27 CN CN202010460779.0A patent/CN113747001B/en active Active
Patent Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6130993A (en) * | 1998-04-20 | 2000-10-10 | Asahi Kogaku Kogyo Kabushiki Kaisha | Camera having an image stabilizer |
| US20040141065A1 (en) * | 2003-01-17 | 2004-07-22 | Minolta Co., Ltd. | Image taking device with bent optical system |
| CN1847970A (en) * | 2005-04-15 | 2006-10-18 | 鸿富锦精密工业(深圳)有限公司 | Camera possessing hand vibration preventor |
| US20100245603A1 (en) * | 2007-11-09 | 2010-09-30 | Panasonic Corporation | Camera, camera system, and camera body |
| US20150229843A1 (en) * | 2012-10-31 | 2015-08-13 | Fujifilm Corporation | Camera module having anti-shake mechanism |
| US20140362242A1 (en) * | 2012-11-16 | 2014-12-11 | Panasonic Intellectual Property Corporation Of America | Camera drive device |
| US20140267809A1 (en) * | 2013-03-12 | 2014-09-18 | Canon Kabushiki Kaisha | Imaging apparatus and control method therefor |
| CN107515459A (en) * | 2016-06-17 | 2017-12-26 | 宁波舜宇光电信息有限公司 | Periscopic camera module and its imaging method |
| CN106405991A (en) * | 2016-11-29 | 2017-02-15 | 深圳市世尊科技有限公司 | Periscopic camera shooting module and reflector apparatus used for the periscopic camera shooting module |
| CN110505370A (en) * | 2018-05-16 | 2019-11-26 | 宁波舜宇光电信息有限公司 | Light steering assembly and its manufacturing method and periscopic camera module, periscopic array mould group and electronic equipment |
| CN109905581A (en) * | 2019-03-21 | 2019-06-18 | Oppo广东移动通信有限公司 | Imaging modules, CCD camera assembly and electronic device |
| CN110913096A (en) * | 2019-05-05 | 2020-03-24 | 华为技术有限公司 | Camera module and electronic equipment |
| CN110730285A (en) * | 2019-10-14 | 2020-01-24 | Oppo广东移动通信有限公司 | Camera module and terminal equipment |
| CN110879454A (en) * | 2019-12-25 | 2020-03-13 | Oppo广东移动通信有限公司 | Camera module, periscopic camera module, camera assembly and electronic device |
| CN111131683A (en) * | 2020-01-14 | 2020-05-08 | 南昌欧菲光电技术有限公司 | Camera module and electronic device |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115396574A (en) * | 2022-08-18 | 2022-11-25 | Oppo广东移动通信有限公司 | Lens module and electronic equipment |
| CN117135454A (en) * | 2023-01-13 | 2023-11-28 | 荣耀终端有限公司 | Image processing method, device and storage medium |
| CN117135454B (en) * | 2023-01-13 | 2024-09-24 | 荣耀终端有限公司 | Image processing method, device and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113747001B (en) | 2022-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210781015U (en) | Camera module and electronic equipment | |
| JP4917060B2 (en) | Imaging unit and portable electronic device | |
| KR101274665B1 (en) | Imaging device | |
| CN108432226A (en) | Camera model and electronic device including camera model | |
| CN113747001B (en) | Electronic equipment and camera module | |
| WO2020199823A1 (en) | Periscope camera module and multi-camera module | |
| CN108769493A (en) | CCD camera assembly and electronic device | |
| CN112911092A (en) | Camera module and electronic equipment | |
| CN108989641A (en) | Imaging modules and electronic device | |
| CN111131683A (en) | Camera module and electronic device | |
| CN109068029A (en) | Imaging modules and electronic device | |
| WO2021104402A1 (en) | Camera module and electronic device | |
| CN112511731A (en) | Camera module and electronic equipment | |
| CN112394536A (en) | Optical anti-shake device and control method | |
| CN211509141U (en) | Camera module and electronic device | |
| WO2022037591A1 (en) | Lens module, camera module, and terminal | |
| WO2021184245A1 (en) | Camera module and electronic device | |
| CN208386756U (en) | Imaging modules and electronic device | |
| JP4970303B2 (en) | Imaging device | |
| CN212435809U (en) | Anti-shake device of camera module and electronic equipment | |
| CN211791692U (en) | Camera module and electronic equipment | |
| KR20080079222A (en) | Imaging unit and mobile electronic device | |
| CN113467043B (en) | Movable piece, motor, lens module and electronic equipment | |
| CN210381046U (en) | Camera module and electronic equipment | |
| CN103064232B (en) | There is the electronic installation of camera function |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |