CN113264048A - 车辆、操作车辆的系统和方法 - Google Patents
车辆、操作车辆的系统和方法 Download PDFInfo
- Publication number
- CN113264048A CN113264048A CN202110146940.1A CN202110146940A CN113264048A CN 113264048 A CN113264048 A CN 113264048A CN 202110146940 A CN202110146940 A CN 202110146940A CN 113264048 A CN113264048 A CN 113264048A
- Authority
- CN
- China
- Prior art keywords
- tire
- vehicle
- torque
- longitudinal force
- force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 37
- 229920006395 saturated elastomer Polymers 0.000 claims description 16
- 238000012546 transfer Methods 0.000 claims description 14
- 239000013598 vector Substances 0.000 description 13
- 238000004891 communication Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 10
- 238000004088 simulation Methods 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 8
- 230000005484 gravity Effects 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 239000010426 asphalt Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000011217 control strategy Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18172—Preventing, or responsive to skidding of wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/04—Control of vehicle driving stability related to roll-over prevention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/119—Conjoint control of vehicle sub-units of different type or different function including control of all-wheel-driveline means, e.g. transfer gears or clutches for dividing torque between front and rear axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/12—Conjoint control of vehicle sub-units of different type or different function including control of differentials
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/04—Control of vehicle driving stability related to roll-over prevention
- B60W2030/043—Control of vehicle driving stability related to roll-over prevention about the roll axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/26—Wheel slip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/30—Wheel torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/40—Torque distribution
- B60W2720/403—Torque distribution between front and rear axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/40—Torque distribution
- B60W2720/406—Torque distribution between left and right wheel
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
本发明涉及车辆、操作车辆的系统和方法。传感器测量车辆的动态参数。处理器基于车辆的动态参数确定在第一轮胎上的横向力,确定在第一轮胎上的纵向力,该纵向力实现第一轮胎对于横向力的最大抓地力,并调节第一轮胎上的第一扭矩,以便在第一轮胎处实现确定的纵向力。
Description
技术领域
本主题公开涉及控制轮胎力,特别涉及用于在轮胎之间分配力以在转弯中获得最大轮胎抓地力的系统和方法。
背景技术
当轮胎上的横向力或平行于道路的力小于称为轮胎的饱和力的力时,车辆的轮胎便能够抓紧道路。然而,当该横向力超过饱和力时,轮胎沿着道路滑移,导致车辆不稳定。车辆转弯时会在轮胎上施加横向力。根据转弯的动力学,一个轮胎上的横向力可能不同于另一轮胎上的横向力。因此,一个轮胎可能失去与道路的抓地力,而另一轮胎保持其抓地力。这样的情况导致车轮不稳定并且难以控制车辆。因此,期望能够控制在车辆的轮胎上的横向力,以实现轮胎在道路上的最大抓地力。
发明内容
在一示例性实施例中,公开了一种操作车辆的方法。从车辆的动态参数确定在车辆的第一轮胎上的横向力。确定在第一轮胎上的纵向力,该纵向力实现第一轮胎对于横向力的最大抓地力。调节第一轮胎上的第一扭矩,以便在第一轮胎处实现确定的纵向力。
除了本文所述的一个或多个特征之外,调节第一扭矩还包括额外地调节第二轮胎上的第二扭矩。在一实施例中,第一轮胎是饱和轮胎,第二轮胎是不饱和轮胎,并且通过使用第二轮胎的剩余能力来调节第一扭矩以减小第一轮胎上的纵向力。根据在第一轮胎上的归一化纵向力以及在归一化纵向力和理想滑移之间的关系确定第一轮胎的理想滑移率。根据理想滑移和实时路况确定第一轮胎上的纵向力。在一实施例中,在前轴和后轴之间传递扭矩。该方法包括基于第一轮胎的饱和度来调节施加到第一轮胎的第一扭矩的上限。
在另一示例性实施例中,公开了一种用于操作车辆的系统。该系统包括用于测量车辆的动态参数的传感器,以及处理器。处理器配置为:基于车辆的动态参数确定在第一轮胎上的横向力;确定在第一轮胎上的纵向力,该纵向力实现第一轮胎对于横向力的最大抓地力;以及调节第一轮胎上的第一扭矩,以便在第一轮胎处实现确定的纵向力。
除了本文所述的一个或多个特征之外,处理器还配置为通过额外地调节第二轮胎上的第二扭矩来调节第一轮胎上的第一扭矩。在一实施例中,第一轮胎是饱和轮胎,第二轮胎是不饱和轮胎,并且处理器还配置为通过使用第二轮胎的剩余能力来调节第一扭矩以减小第一轮胎上的纵向力。处理器还配置为根据在第一轮胎上的归一化纵向力以及在归一化纵向力和理想滑移之间的关系确定第一轮胎的理想滑移率。处理器还配置为根据理想滑移和实时路况确定第一轮胎上的纵向力。处理器还配置为在前轴和后轴之间传递扭矩。处理器还配置为基于第一轮胎的饱和度来调节施加到第一轮胎的扭矩的上限。
在又一示例性实施例中,公开了一种车辆。车辆包括用于测量车辆的动态参数的传感器,以及处理器。处理器配置为:基于车辆的动态参数确定在第一轮胎上的横向力;确定在第一轮胎上的纵向力,该纵向力实现第一轮胎对于横向力的最大抓地力;以及调节第一轮胎上的第一扭矩,以便在第一轮胎处实现确定的纵向力。
除了本文所述的一个或多个特征之外,处理器还配置为通过额外地调节第二轮胎上的第二扭矩来调节第一轮胎上的第一扭矩。在一实施例中,第一轮胎是饱和轮胎,第二轮胎是不饱和轮胎,并且处理器还配置为通过使用第二轮胎的剩余能力来调节第一扭矩以减小第一轮胎上的纵向力。处理器还配置为根据在第一轮胎上的归一化纵向力以及在归一化纵向力和理想滑移之间的关系确定第一轮胎的理想滑移率,并且根据理想滑移和实时路况确定第一轮胎上的纵向力。处理器还配置为在前轴和后轴之间传递扭矩。处理器还配置为基于第一轮胎的饱和度来调节施加到第一轮胎的扭矩的上限。
当结合附图考虑时,根据以下详细描述,本公开的以上特征和优点以及其他特征和优点将显而易见。
附图说明
其他特征、优点和细节仅通过示例的方式在下面的详细描述中出现,该详细描述参考附图,其中:
图1示出了根据各个实施例的包括相关轨迹计划系统的车辆;
图2示出了车辆的轮廓的俯视图,其示出了用于将力和扭矩分配到车辆的轮胎的各种致动器;
图3示出了用于以驾驶员辅助或性能模式操作车辆的控制系统架构;
图4示出了流程图,其示出了对于在转弯中受到横向力的轮胎实现最大抓地力的方法;
图5示出了示例性转弯中的车辆,描绘转弯中的车辆上的各种力和扭矩;
图6示出了轮胎的牵引圆;
图7示出了车辆的前后轮胎的归一化纵向力与滑移率的图;
图8示出了对于轮胎的多个转向角的纵向力与滑移率之间的关系图;
图9示出了多种道路条件下的纵向力与滑移率之间的关系图;以及
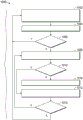
图10示出了用于调节扭矩的过程的流程图。
具体实施方式
以下描述本质上仅是示例性的,并不旨在限制本公开、其应用或用途。应当理解,在所有附图中,相应的附图标记表示相同或相应的部件和特征。如本文所用,术语模块是指处理电路,其可以包括:专用集成电路(ASIC)、电子电路、执行一个或多个软件或固件程序的处理器(共享、专用或组)和存储器、组合逻辑电路和/或提供所描述功能的其他合适部件。
根据示例性实施例,图1示出了根据各个实施例的包括总体上以100示出的相关轨迹计划系统的车辆10。通常,轨迹计划系统100确定用于车辆10的自动驾驶的轨迹计划。车辆10通常包括底盘12、车身14、前轮16和后轮18。车身14布置在底盘12上并且基本包围车辆10的部件。车身14和底盘12可以共同形成框架。车轮16和18每个在车身14的相应角部附近旋转地联接至底盘12。
在各个实施例中,车辆10是自主车辆,并且轨迹计划系统100并入车辆10。车辆10例如是被自动控制以将乘客从一个位置运送到另一个位置的车辆。车辆10在所示实施例中描述为乘用车,但应当理解,也可以使用任何其他车辆,包括摩托车、卡车、运动型多用途车(SUV)、休闲车(RV)等。在示例性实施例中,车辆10是所谓的四级或五级自动化系统。四级系统表示“高度自动化”,是指自动驾驶系统对动态驾驶任务的所有方面的驾驶模式特定性能,即使人类驾驶员没有适当地响应干预要求。五级系统表示“完全自动化”,是指自动驾驶系统在可由人类驾驶员管理的所有道路和环境条件下对动态驾驶任务的所有方面的全时性能。
如图所示,车辆10通常包括推进系统20、传动系统22、转向系统24、制动系统26、传感器系统28、致动器系统30、至少一个数据存储设备32、至少一个控制器34和通信系统36。在各个实施例中,推进系统20可以包括内燃机、诸如牵引马达的电机和/或燃料电池推进系统。传动系统22配置成根据可选择的速比将动力从推进系统20传递至车轮16和18。根据各个实施例,传动系统22可包括有级传动比自动变速器、无级变速器或其他合适的变速器。制动系统26配置成向车轮16和18提供制动扭矩。在各个实施例中,制动系统26可以包括摩擦制动、线制动、诸如电机的再生制动系统和/或其他合适的制动系统。转向系统24影响车轮16和18的位置。尽管出于说明性目的示出为包括方向盘,但在本公开范围内预期的一些实施例中,转向系统24可以不包括方向盘。
传感器系统28包括一个或多个感测设备40a-40n,其感测车辆10的外部环境和/或内部环境的可观察到的状况。感测设备40a-40n可以包括但不限于雷达、激光雷达、全球定位系统、光学相机、热相机、超声波传感器和/或其他传感器。相机可包括彼此隔开选定距离的两个或更多个数字相机,其中两个或更多个数字相机用于获得周围环境的立体图像以便获得三维图像。传感器系统28还可以包括用于测量车辆的运动学参数或动态参数的传感器,比如纵向速度、横向速度、纵向加速度、横向加速度、横摆角、横摆率等或者可以用于计算这些动态参数的参数。
致动器系统30包括一个或多个致动器设备42a-42n,其控制一个或多个车辆特征,比如但不限于推进系统20、传动系统22、转向系统24和制动系统26。在各个实施例中,车辆特征还可以包括内部和/或外部车辆特征,比如但不限于门、行李箱和舱室特征,比如通风、音乐、照明等(未编号)。
控制器34包括至少一个处理器44和计算机可读存储设备或介质46。处理器44可以是任何定制的或可商购的处理器、中央处理单元(CPU)、图形处理单元(GPU)、与控制器34相关的多个处理器中的辅助处理器、基于半导体的微处理器(形式为微芯片或芯片组)、宏处理器、其任何组合或通常用于执行指令的任何设备。例如,计算机可读存储设备或介质46可以包括只读存储器(ROM)、随机存取存储器(RAM)和保持活动存储器(KAM)中的易失性和非易失性存储。KAM是持久性或非易失性存储器,其可以在处理器44掉电时用于存储各种操作变量。可以使用许多已知的存储设备中的任何一种来实现计算机可读存储设备或介质46,比如PROM(可编程只读存储器)、EPROM(电PROM)、EEPROM(电可擦除PROM)、闪存或能够存储数据的任何其他电、磁、光或组合存储设备,其中一些表示可执行指令,由控制器34在控制车辆10时使用。
指令可以包括一个或多个单独的程序,每个程序包括用于实现逻辑功能的可执行指令的有序列表。当由处理器44执行时,指令使处理器44能够从传感器系统28接收并处理信号,执行用于自动控制车辆10的部件的逻辑、计算、方法和/或算法,并且基于该逻辑、计算、方法和/或算法生成至致动器系统30的控制信号以自动控制车辆10的部件。尽管在图1中仅示出了一个控制器34,但车辆10的实施例可包括任意数量的控制器34,它们通过任何合适的通信介质或通信介质的组合进行通信,并且配合以处理传感器信号,执行逻辑、计算、方法和/或算法,并且生成控制信号以自动控制车辆10的特征。
在各个实施例中,控制器34的一个或多个指令体现在轨迹计划系统100中,并且当由处理器44执行时,生成解决环境的运动学和动态约束的轨迹输出。在一示例中,接收的指令是输入过程传感器和地图数据。指令执行带有定制成本函数的基于图的方法,以处理城市和高速公路道路中的不同道路场景。
通信系统36配置为与其他实体48进行无线通信,比如但不限于其他车辆(“V2V”通信)、基础设施(“V2I”通信)、远程系统和/或个人设备(关于图2更详细地描述)。在示例性实施例中,通信系统36是无线通信系统,其配置为使用IEEE 802.11标准或通过使用蜂窝数据通信经由无线局域网(WLAN)进行通信。然而,在本公开的范围内还考虑了诸如专用短程通信(DSRC)信道之类的附加或替代通信方法。DSRC信道是指专门为汽车使用而设计的单向或双向短程到中程无线通信信道以及一组相应的协议和标准。
处理器44还包括用于以两种操作模式(标准操作模式和性能操作模式)中的至少一种操作车辆的程序。在标准操作模式下,处理器44操作车辆的标准仿真模型,其在驾驶员输入和车辆动力学之间提供线性关系。标准仿真模型接收驾驶员输入,并根据驾驶员输入确定车辆的动态参数。标准仿真模型生成用于车辆的致动器的致动器命令,并且处理器44将这些命令发送到致动器,以便在车辆处生成动态参数。
在性能操作模式中,处理器44操作车辆10的性能仿真模型。性能仿真模型通常是车辆的非线性模型,并且与标准仿真模型相比,通常需要更多的输入,以便确定车辆的动态参数。例如,标准仿真模型通常接收驾驶员方向盘角度作为输入,而性能仿真模型通常除了方向盘角度之外还接收轮胎上的牵引扭矩和轮胎上的制动扭矩,以便确定动态参数。因此,性能仿真模型除了方向盘角度之外还包括来自加速踏板和制动踏板的输入,以便限定车辆10的动态状态。性能模型还使用在标准操作模式下不使用的多个致动器,如图2所示。
图2示出了车辆10的轮廓的俯视图200,其示出了用于车辆的各种致动器,用于将力和扭矩分配到车辆的轮胎。示出了车辆的重心CG,并且在重心处示出了以车辆为中心的坐标系215,定义了车辆10的纵轴(x)和横轴(y)。车辆10包括左前轮胎(FL)、右前轮胎(FR)、左后轮胎(RL)和右后轮胎(RR)。前轴202支撑左前轮胎FL和右前轮胎FR,后轴204支撑左后轮胎RL和右后轮胎RR。分别示出了左前轮胎(FL)、右前轮胎(FR)、左后轮胎(RL)和右后轮胎(RR)的轮胎力(Fx,FL,Fy,FL)、(Fx,FR,Fy,FR)、(Fx,RL,Fy,RL)和(Fx,RR,Fy,RR)。驱动机构系统将扭矩从发动机传递到轮胎,以引起轮胎旋转。驱动机构系统包括但不限于全轮驱动致动器(eAWD)206、电子限滑差速器致动器(eLSD)208和开放式差速器(OD)210。电子全轮驱动致动器(eAWD)206控制前轴202和后轴204之间的扭矩分配。eAWD206示出为将扭矩Tf分配给前轴202,并将扭矩Tr分配给后轴204。后轴204处的电子限滑差速器致动器(eLSD)208控制左后轮胎(RL)和右后轮胎(RR)之间的扭矩分配。前轴202处的开放式差速器(OD)210控制左前轮胎(FL)和右前轮胎(FR)之间的扭矩分配。如图2所示,左前轮胎(FL)接收扭矩Tb1,右前轮胎(FR)接收扭矩Tb2,左后轮胎(RL)接收扭矩Tb3,右后轮胎(RR)接收扭矩Tb4。
图3示出了用于以驾驶员辅助或性能模式操作车辆10的控制系统架构300。在各个方面,控制系统架构300包括在处理器44上运行的各种模块,以将驾驶员意图转换为车辆的实际运动。控制系统架构300包括目标状态确定模块304、车辆控制模块306和致动器308。目标状态确定模块304基于驾驶员输入确定车辆的期望状态。车辆控制模块306基于期望状态确定命令控制调节并操作致动器308以控制车辆10。
控制系统架构300从驾驶员接收驾驶员输入302,比如方向盘角度、制动踏板位置和加速器踏板位置。驾驶员输入302被提供给目标状态确定模块304。目标状态确定模块304基于驾驶员输入计算期望状态(Sd),并将期望状态Sd提供给车辆控制模块306。期望状态Sd可以包括但不限于车辆10的期望横摆率、期望侧滑角、期望横向速度和/或期望纵向速度。驾驶员输入也被提供给前馈控制模块314。
车辆控制模块306基于期望状态Sd产生用于车辆的致动器调节命令(δQ)。致动器调节命令δQ可被添加到与求和器320处的驾驶员输入相对应的致动器命令(Q)。致动器命令Q由前馈控制模块314提供。总和(Q+δQ)被提供给致动器308,以提供操作车辆10的动作Qa。致动器可包括例如eAWD206、eLSD208和开放式差速器210。致动器用于生成车辆10处的期望状态(例如期望横摆率、期望纵向速度等)。在各个实施例中,可以调节致动器命令以确保它们不会导致轮胎力超过轮胎的能力。
因此,车辆10经历期望的动态状态,比如期望横摆率和/或期望侧滑角。车辆10上的传感器316可以检测这些动态参数及其值。可替代地,传感器316可以获得可用于确定这些动态参数的测量值。另外,车辆状态估计和故障检测模块312可以估计这些动态参数的值。可以将这些动态参数的感测值和这些动态参数的估计值提供给车辆控制模块306,以帮助车辆控制模块306为车辆控制的下一时间步长确定命令致动器调节δQ。这些感测和估计值也可以被提供给目标状态确定模块304,以便控制期望状态Sd的计算。这种反馈防止由目标状态确定模块304生成的期望状态Sd变化太快。传感器316可以进一步将感测值和估计值提供给前馈控制模块314。
随着车辆转弯,横向力会施加在每个轮胎上。当轮胎上的横向力超过轮胎的某个饱和值时,轮胎会失去对道路的抓地力并横向滑移。本文公开的方法确定至少一个轮胎上的横向力并调节施加到轮胎上的扭矩,以便在给定横向力的情况下获得轮胎的最大抓地力。在各个实施例中,该方法确定在第一轮胎上的横向力和在第二轮胎上的横向力,并调节第一轮胎和第二轮胎之间的扭矩,以便获得第一和第二轮胎的最大抓地力。在各个实施例中,调节扭矩在第一轮胎和第二轮胎中的每个上传递纵向力,以便使每个轮胎的抓地力最大化。例如,当第一轮胎上的横向力导致轮胎滑移并且第二轮胎具有未使用的能力时,可以通过采用第二轮胎的未使用的能力来调节扭矩,以将力从第一轮胎传递到第二轮胎以减少第一轮胎上的滑移。第一轮胎和第二轮胎之间的力平衡可以在前轮胎和后轮胎、左轮胎和右轮胎或者因此任何组合之间。
图4示出了流程图400,其示出了实现在转弯中承受横向力的轮胎的最大抓地力的方法。
在框402,在车辆处获得与轮胎和车辆动力学有关的传感器测量。这些传感器测量可以包括但不限于施加的扭矩、转向角、轮胎的旋转速率、车辆的横摆率、加速度计测量等。在框404,传感器测量被输入到车辆的集成轮胎和车辆模型中,以便确定至少一个轮胎上的至少一个横向力。在框406,计算车轮上的“最佳”横向和纵向力。这些最佳力是使轮胎饱和的力,从而实现轮胎对道路的最大抓地力。在框408,计算与在框406计算出的轮胎上的最佳横向和纵向力相对应的理想目标滑移。理想目标滑移对应于“最佳”或干燥的道路条件。在框410,基于框408的理想目标滑移和当前道路条件(其例如可以包括潮湿道路条件或结冰道路条件)来确定实时目标滑移。在框412,在车辆的各个致动器处执行车轮滑移控制策略,以便以在当前轮胎和道路条件下实现车辆的最佳控制的方式在轮胎之间分配扭矩和力。一旦扭矩和力已经分配在车辆上,该方法返回到框404,以便确定用于随后时间步长的横向力的当前或更新值。下面讨论图4中公开的方法的细节。
图5示出了说明性转弯500中的车辆,描绘了转弯中的车辆上的各种力和扭矩。力矢量 表示前轴上的横向力,力矢量
表示前轴上的横向力,力矢量 表示后轴上的横向力。这些力围绕车辆的重心在车辆上施加扭矩,该扭矩可以通过外部施加的扭矩(比如轮胎摩擦)来平衡。描述在给定图5所示的力的情况下车辆没有旋转或恒定旋转的条件的扭矩平衡方程在方程(1)中示出:
表示后轴上的横向力。这些力围绕车辆的重心在车辆上施加扭矩,该扭矩可以通过外部施加的扭矩(比如轮胎摩擦)来平衡。描述在给定图5所示的力的情况下车辆没有旋转或恒定旋转的条件的扭矩平衡方程在方程(1)中示出:

其中, 是前轴的横向力,
是前轴的横向力, 是后轴的横向力,LF是重心到前轴202的距离,LR是从重心CG到后轴204的距离。项
是后轴的横向力,LF是重心到前轴202的距离,LR是从重心CG到后轴204的距离。项 是从外部施加在车辆上的横摆力矩。
是从外部施加在车辆上的横摆力矩。
除了方程(1)的扭矩平衡方程,方程(2)中示出了转弯中的车辆的力平衡方程:

其中,δ是前轴的转向角,m是车辆的质量, 是车辆的期望横向加速度。可以对方程(1)和(2)进行求解,以确定前轴处的横向力和后轴处的横向力。最佳横向力即轮胎实现最大抓地力的力通过方程(3)和(4)来设置这些横向力值:
是车辆的期望横向加速度。可以对方程(1)和(2)进行求解,以确定前轴处的横向力和后轴处的横向力。最佳横向力即轮胎实现最大抓地力的力通过方程(3)和(4)来设置这些横向力值:

其中, 是前轮胎上的最佳横向力,以及
是前轮胎上的最佳横向力,以及

其中, 是后轴上的最佳横向力。
是后轴上的最佳横向力。
图6示出了轮胎的牵引圆600。牵引圆600指示用于保持在道路上的抓地力的横向和纵向轮胎力的极限。纵向力沿x轴显示,而横向力沿y轴显示。轮胎上的力由以原点为中心的力矢量表示。当力矢量位于牵引圆之内时,轮胎能够保持其在道路上的抓地力。当力矢量超过牵引力圆或位于牵引力圆之外时,轮胎会失去对道路的抓地力,并沿着道路滑动。当轮胎上的力在牵引圆600上时,称轮胎已饱和。尽管在图6中表示为圆,但用于任何特定轮胎的牵引圆600可以具有其他形状,包括椭圆形等。另外,牵引圆600的尺寸基于各种参数,包括施加到轮胎的法向力。
横向力矢量602指示转弯中的轮胎上的横向力 横向力矢量602是位于沿着牵引圆600的极限力矢量604的横向分量,这种极限力矢量604为轮胎提供最大抓地力。极限力矢量604还包括纵向力矢量606(
横向力矢量602是位于沿着牵引圆600的极限力矢量604的横向分量,这种极限力矢量604为轮胎提供最大抓地力。极限力矢量604还包括纵向力矢量606( ),其是轮胎上的仍允许轮胎抓紧道路的最大可能纵向力。可以使用方程(5)根据横向力矢量602确定纵向力矢量606:
),其是轮胎上的仍允许轮胎抓紧道路的最大可能纵向力。可以使用方程(5)根据横向力矢量602确定纵向力矢量606:

其中, 是在给定横向力
是在给定横向力 并在抓紧道路时可施加到轮胎的最大纵向力。Fz,ij是施加到轮胎的法向力。索引i和j用于表示车轮位置i={前,后}和j={左,右},方程(5)还包括各种路面系数,其中,μx,ij是归一化纵向力,μy,ij是轮胎的归一化横向力。
并在抓紧道路时可施加到轮胎的最大纵向力。Fz,ij是施加到轮胎的法向力。索引i和j用于表示车轮位置i={前,后}和j={左,右},方程(5)还包括各种路面系数,其中,μx,ij是归一化纵向力,μy,ij是轮胎的归一化横向力。
然后组合轮胎力,以确定相关轴上的最大纵向力。可以在前轴202处处理的最大纵向力是每个前轮上的最大纵向力的总和,如方程(6)所示:

类似地,可以在后轴204处处理的最大纵向力是每个后轮上的最大纵向力的总和,如方程(7)所示:

出于关于方程(3)和(4)呈现的相同原因,前轴处的最佳纵向力由方程(8)设定:

并且后轴处的最佳纵向力由方程(9)设定:

一旦为每个轴计算出最佳力,就可以为每个轮胎计算出最佳力。在沿每个轴的最佳力分布中,左右轮胎均等地共享轴上的力。因此,

其中,i={前,后}和j={左,右}。对于选定的轮胎,最佳纵向力可以相对于轮胎上的法向力进行归一化,如方程(11)所示:

其中,μx,ij是归一化纵向力。方程(11)假定理想条件。然而,在非理想条件下,比如在湿滑道路条件下,

其中,μs是表面粘附系数。如果μs<1,则使用方程(11)估计的归一化纵向力大于从牵引圆确定的极限值,这可能导致力的计算不正确。为了确定当前道路条件的力,假定μs=1(即使用方程(11))确定归一化力。然后将这些归一化力用于确定滑移或滑移率。
图7示出了车辆的前后轮胎的归一化纵向力与滑移率的图。图700是车辆的前轮胎的归一化纵向力对滑移率的图。图702是车辆的后轮胎的归一化纵向力对滑移率的图。曲线704示出了前轮胎的归一化纵向力与滑移率之间的关系,而曲线706示出了后轮胎的归一化纵向力与滑移率之间的关系。曲线704和706假定最佳道路条件。使用它们各自的曲线,由方程(11)确定轮胎的归一化纵向力用于确定前后轮胎的滑移率。例如,对于前轮胎,归一化纵向力约为0.3,对应于0.01的理想滑移。对于后轮胎,归一化纵向力约为0.9,对应于约为0.02的理想滑移。一旦确定了轮胎的理想滑移,就可以确定纵向力,该纵向力对于当前道路条件在轮胎处实现该理想滑移率。
图8示出了轮胎的多个转向角的纵向力与滑移率之间的关系的图800。曲线802代表转向角为0度的关系,曲线804代表转向角为5度的关系,曲线806代表转向角为10度的关系。轮胎的纵向力可以使用相关的曲线来确定,理想滑移率可以使用图7的图来确定。
图9示出了对于多种道路条件的纵向力与滑移率之间的关系的图。曲线902代表混凝土的关系,曲线904代表干沥青的关系,曲线906代表湿沥青的关系,曲线908代表冰的关系。轮胎的纵向力可以使用相关的曲线来确定,理想滑移率可以使用图7的图来确定。
一旦基于理想和实时道路条件确定了要施加的纵向力,就可以在轮胎上调节扭矩以实现该纵向力。在各个实施例中,可以在轮胎之间调节扭矩,以便将纵向力从一个轮胎传递到另一轮胎。传递的力的量取决于接收该力的轮胎的剩余轮胎能力。
在各个实施例中,控制系统架构300控制轮胎之间的扭矩传递,以最大化轮胎对道路的抓地力。控制扭矩包括使用eAWD206在前轴和后轴之间传递扭矩,以及使用eLSD208在右后轮和左后轮之间传递扭矩。扭矩传递操作包括修改上限,其控制可以调节扭矩的速度。
对于前轴与后轴之间的扭矩传递操作,定义上限ΔTmax。上限涉及接收扭矩的轴,在本文中也称为接收器轴。上限部分地取决于接收器轴的能力。特别是,当前轴是接收器轴时,上限由方程(13)定义:

其中, 是向前轴传递扭矩的上限,
是向前轴传递扭矩的上限, 是前轴的马达的最大扭矩能力,
是前轴的马达的最大扭矩能力, 是前轴的扭矩能力。当后轴是接收器轴时,上限由方程(14)定义:
是前轴的扭矩能力。当后轴是接收器轴时,上限由方程(14)定义:

其中, 是向后轴传递扭矩的上限,
是向后轴传递扭矩的上限, 是后轴的马达的最大能力,
是后轴的马达的最大能力, 是后轴的扭矩能力。
是后轴的扭矩能力。
扭矩在一系列时间步长上在轴之间传递。对于每个时间步长,都会根据更新的条件重新确定上限。在道路条件被高估的情况下(即道路质量不理想),可能需要减小轴上的扭矩。扭矩在时间步长之间以选定的量下降。扭矩上限根据方程(15)减小:

其中,k是表示时间步长的索引,ΔTredc,i表示所选的扭矩减小值。该下降过程一直持续到扭矩上限消失,此时可以执行上升过程,以提高轮胎上的扭矩以达到饱和状态。扭矩上限在上升过程中增加,如方程(16)所示:

其中,ΔTprom,i代表选定的扭矩增加值。
类似地,右后轮胎和左后轮胎之间的扭矩传递由它们之间传递的扭矩的上限控制。根据转弯的方向,一个轮胎将比另一个轮胎具有更大的牵引。该车轮在本文中称为高牵引轮胎。使用测量的车轮速度来检测高牵引车轮。根据哪个轮胎是高牵引车轮来调节轮胎之间的扭矩。扭矩传递的上限是根据高牵引轮胎确定的,如方程(17)所示:

其中,ωRL是左后轮胎的角速度,ωRR是右后轮胎的角速度, 是右后轮胎的扭矩能力,
是右后轮胎的扭矩能力, 是左后轮胎的扭矩能力。除非高牵引轮胎的滑移率大于选定的阈值,否则扭矩将传递到高牵引轮胎。随着扭矩的传递,扭矩上限根据方程(18)下降:
是左后轮胎的扭矩能力。除非高牵引轮胎的滑移率大于选定的阈值,否则扭矩将传递到高牵引轮胎。随着扭矩的传递,扭矩上限根据方程(18)下降:

其中,ΔTred,c是扭矩减小值。继续下降过程,直到高牵引车轮的纵向稳定性条件成立,表明高牵引车轮处于稳定状态。然后开始上升过程,以根据方程(19)平稳地增加扭矩上限:

图10示出了用于调节扭矩的过程1000的流程图。在框1002,基于干燥道路条件计算控制动作。可以使用方程(19)如下计算控制动作:

其中,Reff是比例因子, 是用于保持轮胎抓地力的最大可能纵向力,
是用于保持轮胎抓地力的最大可能纵向力, 是轮胎的当前纵向力。
是轮胎的当前纵向力。
在框1004,监测纵向或横向饱和。在框1006,确定轮胎是否饱和。在框1006,如果轮胎未饱和,则过程返回至框1002以继续监测循环。然而,如果轮胎饱和,则该方法前进至框1008。在框1008,减小扭矩传递的上限。
在框1010,进行轮胎是否饱和的另一确定。如果轮胎饱和,则该方法前进至框1016,在框1016将上限设置为零。返回至框1010,如果轮胎未饱和,则该方法前进至框1012。在框1012,上限增加。在框1014,进行轮胎是否饱和的另一确定。如果轮胎未饱和,则该方法返回至框1008,在框1008上限下降。如果轮胎饱和,则该方法返回至框1002。
尽管已经参考示例性实施例描述了以上公开,但本领域技术人员将理解,在不脱离其范围的情况下,可以进行各种改变,并且可以用等同物代替其要素。另外,在不脱离本公开的实质范围的情况下,可以做出许多修改以使特定情况或材料适应本公开的教导。因此,意图是本公开不限于所公开的特定实施例,而是将包括落入其范围内的所有实施例。
Claims (10)
1.一种操作车辆的方法,包括:
从车辆的动态参数确定在车辆的第一轮胎上的横向力;
确定在第一轮胎上的纵向力,该纵向力实现第一轮胎对于横向力的最大抓地力;以及
调节第一轮胎上的第一扭矩,以便在第一轮胎处实现确定的纵向力。
2.根据权利要求1所述的方法,其中,调节所述第一扭矩还包括额外地调节第二轮胎上的第二扭矩。
3.根据权利要求2所述的方法,其中,所述第一轮胎是饱和轮胎,所述第二轮胎是不饱和轮胎,所述方法还包括:通过使用第二轮胎的剩余能力来调节所述第一扭矩以减小第一轮胎上的纵向力。
4.根据权利要求1所述的方法,还包括:根据在所述第一轮胎上的归一化纵向力以及在所述归一化纵向力和理想滑移之间的关系确定第一轮胎的理想滑移率,并且根据所述理想滑移和实时路况确定第一轮胎上的纵向力。
5.根据权利要求1所述的方法,还包括在前轴和后轴之间传递扭矩。
6.一种用于操作车辆的系统,包括:
用于测量车辆的动态参数的传感器;以及
处理器,其配置为:
基于车辆的动态参数确定在第一轮胎上的横向力;
确定在第一轮胎上的纵向力,该纵向力实现第一轮胎对于横向力的最大抓地力;以及
调节第一轮胎上的第一扭矩,以便在第一轮胎处实现确定的纵向力。
7.根据权利要求6所述的系统,其中,所述处理器还配置为通过额外地调节第二轮胎上的第二扭矩来调节所述第一轮胎上的第一扭矩。
8.根据权利要求7所述的系统,其中,所述第一轮胎是饱和轮胎,所述第二轮胎是不饱和轮胎,并且所述处理器还配置为通过使用第二轮胎的剩余能力来调节所述第一扭矩以减小第一轮胎上的纵向力。
9.根据权利要求6所述的系统,其中,所述处理器还配置为根据在所述第一轮胎上的归一化纵向力以及在所述归一化纵向力和理想滑移之间的关系确定第一轮胎的理想滑移率,并且根据所述理想滑移和实时路况确定第一轮胎上的纵向力。
10.根据权利要求6所述的系统,其中,所述处理器还配置为在前轴和后轴之间传递扭矩。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/791,470 | 2020-02-14 | ||
| US16/791,470 US11396287B2 (en) | 2020-02-14 | 2020-02-14 | Architecture and methodology for real-time target wheel slip identification to optimally manage wheel stability and vehicle lateral grip |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113264048A true CN113264048A (zh) | 2021-08-17 |
| CN113264048B CN113264048B (zh) | 2024-05-24 |
Family
ID=77060951
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110146940.1A Active CN113264048B (zh) | 2020-02-14 | 2021-02-02 | 车辆、操作车辆的系统和方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11396287B2 (zh) |
| CN (1) | CN113264048B (zh) |
| DE (1) | DE102021100766A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117818641A (zh) * | 2023-12-13 | 2024-04-05 | 无锡商业职业技术学院 | 一种智能汽车轨迹跟踪控制方法及系统 |
| CN118372886A (zh) * | 2024-06-21 | 2024-07-23 | 长城汽车股份有限公司 | 一种车辆控制的方法、装置、车辆和计算机可读存储介质 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210142057A (ko) * | 2020-05-15 | 2021-11-24 | 현대자동차주식회사 | 차량 선회 제어 장치, 그를 포함한 시스템 및 그 방법 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040176899A1 (en) * | 2003-03-07 | 2004-09-09 | Hallowell Stephen James | Torque distribution systems and methods for wheeled vehicles |
| US20100161194A1 (en) * | 2008-12-22 | 2010-06-24 | Gm Global Technology Operations, Inc. | System and method for active traction control of a vehicle |
| CN104554274A (zh) * | 2013-10-24 | 2015-04-29 | 固特异轮胎和橡胶公司 | 道路摩擦估计系统与方法 |
| CN107539311A (zh) * | 2016-06-23 | 2018-01-05 | 福特全球技术公司 | 车辆轮胎饱和度估计装置 |
| CN107685737A (zh) * | 2016-08-04 | 2018-02-13 | 通用汽车环球科技运作有限责任公司 | 用于确定车辆打滑失控状态的方法和系统 |
| CN108025709A (zh) * | 2015-06-30 | 2018-05-11 | 凯尔西-海耶斯公司 | 机动车牵引力控制方法 |
| US20190143986A1 (en) * | 2017-11-14 | 2019-05-16 | Neapco Intellectual Property Holdings, Llc | Torque modulation to linearize tire slip characteristics |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4750124A (en) | 1986-11-19 | 1988-06-07 | General Motors Corporation | Anti-lock brake control system |
| US6325469B1 (en) | 1996-09-06 | 2001-12-04 | General Motors Corporation | Brake control system |
| JPH10315945A (ja) * | 1997-05-20 | 1998-12-02 | Toyota Motor Corp | 車輌の安定走行制御装置 |
| US6035251A (en) | 1997-11-10 | 2000-03-07 | General Motors Corporation | Brake system control method employing yaw rate and ship angle control |
| US6282479B1 (en) | 1999-08-16 | 2001-08-28 | General Motors Corporation | Vehicle stability enhancement system in high center of gravity vehicle |
| JP3601487B2 (ja) * | 2000-11-20 | 2004-12-15 | トヨタ自動車株式会社 | 車輌の制駆動力制御装置 |
| US6813552B2 (en) | 2002-11-18 | 2004-11-02 | General Motors Corporation | Method and apparatus for vehicle stability enhancement system |
| US6819998B2 (en) | 2002-11-26 | 2004-11-16 | General Motors Corporation | Method and apparatus for vehicle stability enhancement system |
| US6865468B2 (en) | 2002-11-26 | 2005-03-08 | General Motors Corporation | Method and apparatus for vehicle stability enhancement system |
| US6879898B2 (en) | 2003-01-03 | 2005-04-12 | General Motors Corporation | Method and apparatus for vehicle integrated chassis control system |
| US6968261B2 (en) | 2003-01-03 | 2005-11-22 | General Motors Corporation | Method and apparatus for vehicle stability enhancement system |
| US6842685B2 (en) | 2003-03-06 | 2005-01-11 | Delphi Technologies, Inc. | TCS stability utilizing a controlled center coupling and controlled brake system |
| US6856885B2 (en) | 2003-04-01 | 2005-02-15 | General Motors Corporation | Vehicle stability enhancement control |
| US7698034B2 (en) | 2004-01-06 | 2010-04-13 | Gm Global Technology Operations, Inc. | Integrating active front steering and vehicle stability brake control |
| US6856886B1 (en) | 2004-03-23 | 2005-02-15 | General Motors Corporation | Vehicle stability enhancement control and method |
| US7099759B2 (en) | 2004-03-30 | 2006-08-29 | General Motors Corporation | Method and apparatus for estimating steering behavior for integrated chassis control |
| US7274984B2 (en) | 2004-06-14 | 2007-09-25 | General Motors Corporation | Vehicle stability enhancement system |
| US7472006B2 (en) | 2004-09-20 | 2008-12-30 | Gm Global Technology Operations, Inc. | Vehicle dynamics control architecture |
| US7181326B2 (en) | 2004-12-20 | 2007-02-20 | General Motors Corporation | Active front steer control for vehicle stability enhancement |
| US7706941B2 (en) | 2006-07-20 | 2010-04-27 | Gm Global Technology Operations, Inc. | Method and system for coordinating a vehicle stability control system with a suspension damper control sub-system |
| US7917270B2 (en) | 2007-06-19 | 2011-03-29 | GM Global Technology Operations LLC | Operation of electronic stability control systems using data from a plurality of sources |
| US8108103B2 (en) | 2008-10-01 | 2012-01-31 | GM Global Technology Operations LLC | Nonlinear frequency dependent filtering for vehicle ride/stability control |
| JP5154397B2 (ja) * | 2008-12-25 | 2013-02-27 | 富士重工業株式会社 | 車両運動制御装置 |
| US8886434B2 (en) | 2009-02-04 | 2014-11-11 | GM Global Technology Operations LLC | Method of operating an electronic stability control |
| US8417417B2 (en) | 2010-07-28 | 2013-04-09 | GM Global Technology Operations LLC | Architecture and methodology for holistic vehicle control |
| US8315764B2 (en) | 2010-09-07 | 2012-11-20 | GM Global Technology Operations LLC | Optimal corner control for vehicles |
| US8718868B2 (en) | 2011-06-30 | 2014-05-06 | GM Global Technology Operations LLC | Vehicle using tire temperature to adjust active chassis systems |
| US8684115B2 (en) | 2012-06-13 | 2014-04-01 | GM Global Technology Operations LLC | Vehicle and a modular drive apparatus for the vehicle |
| US9296391B2 (en) * | 2014-03-25 | 2016-03-29 | Ford Global Technologies, Llc | E-drive torque sensing vehicle state estimation methods for vehicle control |
-
2020
- 2020-02-14 US US16/791,470 patent/US11396287B2/en active Active
-
2021
- 2021-01-15 DE DE102021100766.6A patent/DE102021100766A1/de active Pending
- 2021-02-02 CN CN202110146940.1A patent/CN113264048B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040176899A1 (en) * | 2003-03-07 | 2004-09-09 | Hallowell Stephen James | Torque distribution systems and methods for wheeled vehicles |
| US20100161194A1 (en) * | 2008-12-22 | 2010-06-24 | Gm Global Technology Operations, Inc. | System and method for active traction control of a vehicle |
| CN104554274A (zh) * | 2013-10-24 | 2015-04-29 | 固特异轮胎和橡胶公司 | 道路摩擦估计系统与方法 |
| CN108025709A (zh) * | 2015-06-30 | 2018-05-11 | 凯尔西-海耶斯公司 | 机动车牵引力控制方法 |
| CN107539311A (zh) * | 2016-06-23 | 2018-01-05 | 福特全球技术公司 | 车辆轮胎饱和度估计装置 |
| CN107685737A (zh) * | 2016-08-04 | 2018-02-13 | 通用汽车环球科技运作有限责任公司 | 用于确定车辆打滑失控状态的方法和系统 |
| US20190143986A1 (en) * | 2017-11-14 | 2019-05-16 | Neapco Intellectual Property Holdings, Llc | Torque modulation to linearize tire slip characteristics |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117818641A (zh) * | 2023-12-13 | 2024-04-05 | 无锡商业职业技术学院 | 一种智能汽车轨迹跟踪控制方法及系统 |
| CN118372886A (zh) * | 2024-06-21 | 2024-07-23 | 长城汽车股份有限公司 | 一种车辆控制的方法、装置、车辆和计算机可读存储介质 |
| CN118372886B (zh) * | 2024-06-21 | 2024-08-20 | 长城汽车股份有限公司 | 一种车辆控制的方法、装置、车辆和计算机可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210253089A1 (en) | 2021-08-19 |
| CN113264048B (zh) | 2024-05-24 |
| US11396287B2 (en) | 2022-07-26 |
| DE102021100766A1 (de) | 2021-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114454866A (zh) | 用于重型车辆的基于车轮滑移的车辆运动管理 | |
| JP7508563B2 (ja) | 速度制限付きのトルク要求に基づく車両運動管理 | |
| CN113264048B (zh) | 车辆、操作车辆的系统和方法 | |
| US11780449B2 (en) | System and method to estimate maximum lateral acceleration and yaw rate in limit handling maneuvers in low-friction surfaces | |
| US20190256094A1 (en) | Architecture and methodology for target states determination of performance vehicle motion control | |
| US20170361834A1 (en) | System for mitigating vehicle sway | |
| US11097743B2 (en) | Method and system for controlling a vehicle by determining a location of an optimum perceived yaw center | |
| US20230034858A1 (en) | Systems and methods for electric vehicle speed control | |
| US11794747B2 (en) | Method for controlling an actuator of a vehicle | |
| CN113246961B (zh) | 控制车辆稳定性的系统和方法 | |
| CN111348040A (zh) | 车辆的行驶控制方法和行驶控制装置 | |
| US11529948B2 (en) | Architecture and methodology of limit handling intended driver command interpreter to achieve maximum lateral grip | |
| CN114523971A (zh) | 用于车辆的车辆运动管理系统和运动支持系统 | |
| CN113276834B (zh) | 使用感知横摆中心进行车辆综合稳定性控制的系统和方法 | |
| EP4244105B1 (en) | Vehicle motion management system and motion support device control system | |
| US20240326607A1 (en) | Pre-emptive wheel slip control by wheel displacement | |
| KR20240069764A (ko) | 대형 차량을 위한 휠 슬립-기반 모션 제어 | |
| CN118182623A (zh) | 用于自动驾驶控制的电动助力转向参数的在线评估方法和系统 | |
| CN117719490A (zh) | 车辆行驶稳定性自适应控制系统和控制方法 | |
| KR20240016280A (ko) | 휠 슬립 밸런스드 드라이브 기반의 에너지 효율적 추진 | |
| Holzmann et al. | Performing the vehicle command |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |