CN113218389A - 一种车辆定位方法、装置、存储介质及计算机程序产品 - Google Patents
一种车辆定位方法、装置、存储介质及计算机程序产品 Download PDFInfo
- Publication number
- CN113218389A CN113218389A CN202110564851.9A CN202110564851A CN113218389A CN 113218389 A CN113218389 A CN 113218389A CN 202110564851 A CN202110564851 A CN 202110564851A CN 113218389 A CN113218389 A CN 113218389A
- Authority
- CN
- China
- Prior art keywords
- imu
- data
- time
- target vehicle
- positioning data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 80
- 238000004590 computer program Methods 0.000 title claims abstract description 22
- 238000012937 correction Methods 0.000 claims abstract description 58
- 230000004927 fusion Effects 0.000 claims abstract description 45
- 238000005259 measurement Methods 0.000 claims description 23
- 238000012545 processing Methods 0.000 claims description 23
- 238000009499 grossing Methods 0.000 claims description 14
- 238000001514 detection method Methods 0.000 claims description 13
- 230000004807 localization Effects 0.000 claims description 9
- 230000003068 static effect Effects 0.000 claims description 7
- 238000012986 modification Methods 0.000 claims description 2
- 230000004048 modification Effects 0.000 claims description 2
- 230000001133 acceleration Effects 0.000 description 20
- 239000013598 vector Substances 0.000 description 16
- 239000011159 matrix material Substances 0.000 description 12
- 230000008569 process Effects 0.000 description 12
- 238000001914 filtration Methods 0.000 description 10
- 238000004364 calculation method Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 230000008901 benefit Effects 0.000 description 3
- 238000004422 calculation algorithm Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 230000003111 delayed effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- 102100023927 Asparagine synthetase [glutamine-hydrolyzing] Human genes 0.000 description 1
- 241000287196 Asthenes Species 0.000 description 1
- 101100380329 Homo sapiens ASNS gene Proteins 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000007499 fusion processing Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
Abstract
本公开提供了一种车辆定位方法、装置、存储介质和计算机程序产品,其中,该方法包括:在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据后,获取目标车辆在第一历史时刻的第一IMU定位数据和在目标时刻的第二IMU定位数据;基于标准定位数据和第一IMU定位数据,确定定位修正数据;基于定位修正数据和第二IMU定位数据,确定目标车辆在目标时刻的修正后定位数据。本公开实施例利用IMU高频输出的特点,以及基于多传感器融合系统提供的具有较高精度的标准定位数据对第二IMU定位数据进行修正,得到的修正后定位数据,能够为目标车辆提供低延时的较高精度的定位数据,进而提高自动驾驶的安全性。
Description
技术领域
本公开涉及自动驾驶技术领域,具体而言,涉及一种车辆定位方法、装置、存储介质及计算机程序产品。
背景技术
近年来,随着智能化水平的不断提高,自动驾驶技术取得飞速发展,给人们带来较多便利。可靠的定位结果是自动驾驶中安全保证的基础。自动驾驶需要厘米级精准的定位结果,因此需要在传统的定位技术的基础上结合多个传感器采集到的定位信息,优化车辆的定位结果,才能满足高精度的定位要求。但是,一般传感器采集信息的频率比较低,同时将多个传感器所采集的定位信息和高精度地图进行匹配也需要比较多的计算时间。因此,自动驾驶系统会产生比较大的延迟,进而影响自动驾驶的安全。
发明内容
本公开实施例至少提供一种车辆定位方法、装置、存储介质及计算机程序产品。
第一方面,本公开实施例提供了一种车辆定位方法,包括:
在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据后,获取所述目标车辆在所述第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;所述第二IMU定位数据为最新输出的IMU定位数据;
基于所述标准定位数据和所述第一IMU定位数据,确定定位修正数据;
基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
一种可选的实施方式中,所述基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据,包括:
基于所述定位修正数据和预设的平滑因子,确定平滑处理后的定位修正数据;
基于所述平滑处理后的定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
一种可选的实施方式中,根据以下步骤确定所述目标车辆在任一时刻的IMU定位数据:
获取所述IMU测量到的所述目标车辆在所述任一时刻的IMU运行数据;
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
一种可选的实施方式中,所述修正后定位数据包括以下至少一项:所述目标车辆的修正位置信息、所述目标车辆的修正速度信息、所述目标车辆的修正姿态信息。
一种可选的实施方式中,所述IMU运行数据包括所述目标车辆的加速度信息;
在所述修正后定位数据指示有所述目标车辆的所述修正速度信息的情况下,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正速度信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的加速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的速度信息。
一种可选的实施方式中,在所述修正后定位数据指示有所述目标车辆的所述修正位置信息和所述修正速度信息的情况下,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正位置信息和所述修正速度信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的加速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的位置信息。
一种可选的实施方式中,所述IMU运行数据包括所述目标车辆的角速度;
在所述修正后定位数据指示有所述目标车辆的所述修正姿态信息的情况下,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正姿态信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的角速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的姿态信息。
一种可选的实施方式中,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
获取基于控制器局域网总线CAN-BUS的测量数据确定的所述目标车辆的静止状态检测结果;
在所述静止状态检测结果指示所述目标车辆未处于静止状态的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
一种可选的实施方式中,所述方法还包括:
获取所述第一历史时刻与所述目标时刻之间的各历史时刻的第三IMU定位数据;
基于所述定位修正数据和所述各历史时刻的第三IMU定位数据,确定所述第一历史时刻与所述目标时刻之间的各历史时刻的修正后定位数据。
第二方面,本公开实施例还提供一种车辆定位装置,包括:
获取模块,用于在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据时,获取所述目标车辆在所述第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;所述第二IMU定位数据为最新输出的IMU定位数据;
第一修正模块,用于基于所述标准定位数据和所述第一IMU定位数据,确定定位修正数据;
第二修正模块,用于基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
一种可选的实施方式中,所述第二修正模块,用于基于所述定位修正数据和预设的平滑因子,确定平滑处理后的定位修正数据;基于所述平滑处理后的定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
一种可选的实施方式中,所述车辆定位装置还包括确定模块,用于获取所述IMU测量到的所述目标车辆在所述任一时刻的IMU运行数据;基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
一种可选的实施方式中,所述修正后定位数据包括以下至少一项:所述目标车辆的修正位置信息、所述目标车辆的修正速度信息、所述目标车辆的修正姿态信息。
一种可选的实施方式中,所述IMU运行数据包括所述目标车辆的加速度信息;
所述确定模块,用于在所述修正后定位数据指示有所述目标车辆的所述修正速度信息的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正速度信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的加速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的速度信息。
一种可选的实施方式中,所述确定模块,用于在所述修正后定位数据指示有所述目标车辆的所述修正位置信息和所述修正速度信息的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正位置信息和所述修正速度信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的加速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的位置信息。
一种可选的实施方式中,所述IMU运行数据包括所述目标车辆的角速度;
所述确定模块,用于在所述修正后定位数据指示有所述目标车辆的所述修正姿态信息的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正姿态信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的角速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的姿态信息。
一种可选的实施方式中,所述确定模块,用于获取基于控制器局域网总线CAN-BUS的测量数据确定的所述目标车辆的静止状态检测结果;在所述静止状态检测结果指示所述目标车辆未处于静止状态的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
一种可选的实施方式中,所述获取模块,还用于获取所述第一历史时刻与所述目标时刻之间的各历史时刻的第三IMU定位数据;基于所述定位修正数据和所述各历史时刻的第三IMU定位数据,确定所述第一历史时刻与所述目标时刻之间的各历史时刻的修正后定位数据。
第三方面,本公开实施例还提供一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的车辆定位方法的步骤。
第四方面,本公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面,或第一方面中任一种可能的车辆定位方法的步骤。
第五方面,本公开实施例提供了一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现上述第一方面,或第一方面中任一种可能的车辆定位方法的步骤。
关于上述车辆定位装置、计算机设备、计算机可读存储介质和计算机程序产品的效果描述参见上述车辆定位方法的说明,这里不再赘述。
本公开实施例提供的车辆定位方法、装置、存储介质和计算机程序产品,在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据后,获取目标车辆在第一历史时刻的第一IMU定位数据和在目标时刻的第二IMU定位数据;基于标准定位数据和第一IMU定位数据,确定定位修正数据;基于定位修正数据和第二IMU定位数据,确定目标车辆在目标时刻的修正后定位数据。其中,本公开实施例的执行系统为IMU系统,由于IMU系统输出IMU定位数据的频率高于多传感器融合系统输出标准定位数据的频率,因此,利用IMU系统能够保证目标车辆在运行过程中获得无延时的IMU定位数据,同时利用IMU系统提供的第一历史时刻的第一IMU定位数据和多传感器融合系统提供的第一历史时刻的标准定位数据,得到的定位修正数据,修正目标时刻的第二IMU定位数据,能够得到目标时刻的一个具有较高精度的定位数据,即目标时刻的修正后定位数据。之后,利用IMU系统获取修正后定位数据,能够为目标车辆提供低延时的较高精度的定位数据,进而提高自动驾驶的安全性。
为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
为了更清楚地说明本公开实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,此处的附图被并入说明书中并构成本说明书中的一部分,这些附图示出了符合本公开的实施例,并与说明书一起用于说明本公开的技术方案。应当理解,以下附图仅示出了本公开的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1示出了本公开实施例所提供的一种车辆定位方法的流程图;
图2示出了本公开实施例所提供的基于IMU运行数据确定IMU定位数据的流程图;
图3示出了本公开实施例所提供的前向滤波和后向滤波过程的示意图;
图4示出了本公开实施例所提供的IMU系统工作流程示意图;
图5示出了本公开实施例所提供的一种车辆定位装置的示意图;
图6示出了本公开实施例所提供的一种计算机设备的结构示意图。
具体实施方式
为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例中附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本公开实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本公开的实施例的详细描述并非旨在限制要求保护的本公开的范围,而是仅仅表示本公开的选定实施例。基于本公开的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
另外,本公开实施例中的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的实施例能够以除了在这里图示或描述的内容以外的顺序实施。
在本文中提及的“多个或者若干个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。
经研究发现,在自动驾驶领域,可靠的定位结果是自动驾驶中安全保证的基础。自动驾驶需要厘米级精准的定位结果,因此需要在传统的定位技术的基础上结合多个传感器采集到的定位信息,优化车辆的定位结果,才能满足高精度的定位要求。但是,一般传感器采集信息的频率比较低,同时将多个传感器所采集的定位信息和高精度地图进行匹配也需要比较多的计算时间。因此,自动驾驶系统会产生比较大的延迟,进而影响自动驾驶的安全。
基于上述研究,本公开提供了一种车辆定位方法、装置、存储介质及计算机程序产品,其中,本公开实施例的执行系统为IMU系统,由于IMU系统输出IMU定位数据的频率高于多传感器融合系统输出标准定位数据的频率,因此,利用IMU系统能够保证目标车辆在运行过程中获得无延时的IMU定位数据,同时利用IMU系统提供的第一历史时刻的第一IMU定位数据和多传感器融合系统提供的第一历史时刻的标准定位数据,得到的定位修正数据,修正目标时刻的第二IMU定位数据,能够得到目标时刻的一个具有较高精度的定位数据,即目标时刻的修正后定位数据。之后,利用IMU系统获取修正后定位数据,能够为目标车辆提供低延时的较高精度的定位数据,进而提高自动驾驶的安全性。
针对以上方案所存在的缺陷,均是发明人在经过实践并仔细研究后得出的结果,因此,上述问题的发现过程以及下文中本公开针对上述问题所提出的解决方案,都应该是发明人在本公开过程中对本公开做出的贡献。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
需要说明的是,本公开实施例中所提到的特定名词包括:
1、惯性测量单元,Inertial measurement unit,IMU,是测量物体三轴姿态角(或角速率)以及加速度的装置。
2、激光雷达,Laser Radar,LiDAR,是以发射激光束探测目标的位置、速度等特征量的雷达系统。
3、全球定位系统,Global Positioning System,GNSS,一种以人造地球卫星为基础的高精度无线电导航的定位系统。
4、控制器局域网总线,ControLLer Area Net-work Bus,CAN-BUS,是一种串行总线系统,通过相应的CAN接口连接工业设备,构成低成本网络。
5、GNSS,Global Navigation Satellite System,全球导航卫星系统,是能在地球表面或近地空间的任何地点为用户提供全天候的3维坐标和速度以及时间信息的空基无线电导航定位系统。
6、频率的单位,赫兹(Hertz,HZ)。
为便于对本实施例进行理解,首先对本公开实施例所公开的一种车辆定位方法的应用场景进行介绍,本发明实施例提供的车辆定位方法可以应用于自动驾驶领域,解决自动驾驶中定位系统的较高延迟问题,提高自动驾驶的安全性。自动驾驶需要厘米级精度的定位结果,可以利用多传感器融合系统,为其提供满足自动驾驶精度要求的高精度的定位数据,并利用该高精度的定位数据对IMU系统输出的IMU定位数据进行修正、处理,最终能够得到修正后的高精度的定位数据。
这里,多传感器融合系统是一种基于高精度地图(HDMaps)并融合处理多个传感器测量结果的系统,能够增强目标车辆的位置精度,具体的传感器类型可以包括以下至少一种:激光雷达、相机、GNSS、IMU、CAN-BUS。其中,相机或者激光雷达一般输出测量数据的频率比较低,比如10HZ,GNSS一般输出测量数据的频率也比较低,比如5HZ,IMU或者CAN-BUS输出测量数据的频率一般为100HZ。需要说明的是,输出频率越低,输出速度越慢。利用多传感器融合系统融合不同传感器在第一历史时刻之后(包括第一历史时刻)的一段时间内的各时刻的测量数据,最终能够得到第一历史时刻的标准定位数据。
示例性的,多传感器融合系统同时将相机或者激光雷达与HDMaps匹配,需要较多的计算时间,另外,相机或者激光雷达输出频率较低的情况下,再叠加与HDMaps匹配的计算时间,会产生一段延时,因此,异步调度IMU系统高频输出IMU定位数据,并结合多传感器融合系统提供的标准定位数据,能够为目标车辆提供低延时的高精度的定位数据。
下面对本公开实施例所公开的一种车辆定位方法进行详细介绍,本公开实施例所提供的车辆定位方法的执行主体一般为具有一定计算能力的计算机设备,该计算机设备例如包括:终端设备或服务器或其它处理设备。在一些可能的实现方式中,该车辆定位方法可以通过处理器调用存储器中存储的计算机可读指令的方式来实现。
下面以执行主体为运行有IMU系统的计算机设备为例对本公开实施例提供的车辆定位方法加以说明。
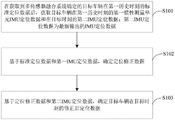
基于上述应用场景的介绍,参见图1所示,为本公开实施例提供的车辆定位方法的流程图,所述方法包括步骤S101~S103,其中:
S101:在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据后,获取目标车辆在第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;第二IMU定位数据为最新输出的IMU定位数据。
本步骤中,第一历史时刻可以为早于当前IMU系统获取到标准定位数据的时刻。这里,标准定位数据为一种高精度的定位数据,是由多传感器融合系统基于高精度地图并融合了多个传感器测量数据得到的一个精准的定位数据。由于多个传感器中的相机或者激光雷达为多传感器融合系统提供的定位数据是低频输出,另外,多传感器融合系统在将相机或者激光雷达提供的定位数据与高精度地图匹配时的计算过程需要一段的时间,因此,在当前时刻获取到的标准定位数据是多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据,当前时刻晚于第一历史时刻。
这里,IMU定位数据可以为基于IMU测量到的目标车辆在对应时刻的IMU运行数据确定的。示例性的,目标车辆在第一历史时刻的第一IMU定位数据,可以为IMU系统基于IMU测量到的目标车辆在第一历史时刻的IMU运行数据确定的;目标车辆在第二历史时刻的第二IMU定位数据,可以为IMU系统基于IMU测量到的目标车辆在第二历史时刻的IMU运行数据确定的。另外,可以利用不同的IMU分别为多传感器融合系统和IMU系统提供IMU运行数据;或者,可以利用设置在目标车辆上相同的IMU测量不同时刻的IMU运行数据分别提供给多传感器融合系统和IMU系统。具体设置情况可以按照实际应用场景进行具体限定,本公开实施例在此不进行限定。
这里,目标时刻可以包括当前时刻,或者是当前时刻的历史时刻。示例性的,如果在获取到第一历史时刻的标准定位数据时,IMU系统确定出了一个IMU定位数据,则目标时刻可以为当前时刻,此时IMU系统确定出的IMU定位数据可以为第二IMU定位数据。示例性的,如果在获取到第一历史时刻的标准定位数据时,IMU系统未确定出IMU定位数据,则获取目标时刻的第二IMU定位数据,该目标时刻早于当前时刻,第二IMU定位数据为IMU系统在历史时刻中最新输出的IMU定位数据。
需要说明的是,IMU系统会将每一历史时刻所确定出的IMU定位数据保存在定位数据队列中,等待修正处理。
定位数据包括位置信息、速度信息、姿态信息,其中,位置信息p包括(x,y,z),速度信息v包括(vx,vy,vz),姿态信息q包括(α,β,γ),即定位数据[p,v,q]包括[x,y,z,vx,vy,vz,α,β,γ]。其中,x,y,z分别表示空间中相互垂直的三个方向坐标。
S102:基于标准定位数据和第一IMU定位数据,确定定位修正数据。
定位数据中包括目标车辆的位置信息、目标车辆的速度信息、目标车辆的姿态信息。
标准定位数据为多传感器融合系统提供的、精确的位置信息p′,精确的速度信息v′,精确的姿态信息q′。其中,姿态信息q′包括角度θ′,θ′表示绕x-y-z旋转的角度θ′=[α,β,γ],即欧拉角。
第一IMU定位数据为IMU系统在第一历史时刻,基于IMU测量到的目标车辆的IMU运行数据所确定出的。其中,第一IMU定位数据包括位置信息p0,速度信息v0,姿态信息q0。其中,姿态信息q0包括角度θ0。
在一种可能的实施方式中,可以基于标准定位数据与第一IMU定位数据之间的差值,确定定位修正数据。示例性的,定位修正数据Δ=[Δp,Δv,Δθ],其中:
Δp=p′-p0
Δv=v′-v0
Δθ=θ′-θ0
S103:基于定位修正数据和第二IMU定位数据,确定目标车辆在目标时刻的修正后定位数据。
第二IMU定位数据为IMU系统在目标时刻,基于IMU测量到的目标车辆的IMU运行数据所确定出的。其中,第二IMU定位数据包括位置信息pi,速度信息vi,姿态信息qi,其中,i表示目标时刻。
具体实施时,可以基于定位修正数据和预设的平滑因子,确定平滑处理后的定位修正数据;基于平滑处理后的定位修正数据和第二IMU定位数据,确定目标车辆在目标时刻的修正后定位数据。
这里,预设的平滑因子可以为通过IMU系统确定出的定位修正数据的置信度,确定的一个平滑因子,记为α。具体地,平滑因子α可以取范围为0~1内的任意数据。需要说明的是,IMU系统确定出的定位修正数据的置信度越高,α值越大。
示例性的,修正后定位数据包括修正位置信息p′i,修正速度信息v′i,修正姿态信息q′i,分别按照公式1~3确定,其中:
p′i=pi+αΔp公式1
v′i=vi+αΔv公式2

其中, 表示四元数的乘法运算,q{}表示将{}内的参数转化为四元数。
表示四元数的乘法运算,q{}表示将{}内的参数转化为四元数。
可以参见图2所示,其为基于IMU运行数据确定IMU定位数据的流程图,可以根据步骤S201~S202确定出目标车辆在任一时刻的IMU定位数据:
S201:获取IMU测量到的目标车辆在任一时刻的IMU运行数据;
S202:基于在任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及目标车辆在任一时刻、和第二历史时刻与任一时刻之间的各历史时刻的IMU运行数据,确定目标车辆在任一时刻的IMU定位数据。
具体实施时,首先可以获取目标车辆的重力加速度g,加速度的偏差ab,角速度的偏差wb,以及IMU测量到的目标车辆在任一时刻的IMU运行数据,IMU运行数据包括加速度信息am和角速度信息wm,之后,结合运动学模型,确定目标车辆在任一时刻的IMU定位数据。
在一个实施例中,确定目标车辆在任一时刻的IMU定位数据中的位置信息,具体实施时,可以基于在任一时刻之前最近一次得到的、在第二历史时刻的修正位置信息和修正速度信息,以及目标车辆在任一时刻、和第二历史时刻与任一时刻之间的各历史时刻的加速度信息,确定目标车辆在任一时刻的IMU定位数据中的位置信息。
具体的,可以参见下述的积分处理公式4:

其中,j表示任一时刻,j-1表示任一时刻之前IMU系统输出的最新的IMU定位数据的时刻,pj表示任一时刻的位置信息,pj-1表示任一时刻j之前IMU系统输出的最新的IMU定位数据中的位置信息或者是任一时刻j之前IMU系统输出的最新的IMU定位数据被修正后的修正后定位数据中的位置信息,vj表示任一时刻j的速度信息,Δt表示任一时刻与任一时刻之前IMU系统输出的最新的IMU定位数据的时刻之间的差值,R表示旋转矩阵。
旋转矩阵R为

其中,qw,qx,qy,qz,分别为姿态qj的四元数,即
qj=[qw,qx,qy,qz]
在一个实施例中,确定目标车辆在任一时刻的IMU定位数据中的速度信息,具体实施时,基于在任一时刻之前最近一次得到的、在第二历史时刻的修正速度信息,以及目标车辆在任一时刻、和第二历史时刻与任一时刻之间的各历史时刻的加速度信息,确定目标车辆在任一时刻的IMU定位数据中的速度信息。
具体的,可以参见下述的积分处理公式5:
vj=vj-1+(R(am-ab)+g)Δt公式5
在一个实施例中,确定目标车辆在任一时刻的IMU定位数据中的姿态信息,具体实施时,基于在任一时刻之前最近一次得到的、在第二历史时刻的修正姿态信息,以及目标车辆在所述任一时刻、和第二历史时刻与任一时刻之间的各历史时刻的角速度信息,确定目标车辆在任一时刻的IMU定位数据中的姿态信息。
具体的,可以参见下述的积分处理公式6:

需要说明的是,g、ab、wb在上述公式4、5、6的积分处理过程中保持不变。
在一些实施例中,在j-1时刻为第二历史时刻的情况下,IMU可以直接利用第二历史时刻的修正后定位数据[p′j-1,v′j-1,q′j-1],确定目标车辆在任一时刻的IMU定位数据[pj,vj,qj]。具体积分处理过程可以参见上述的积分处理过程,重复之处在此不再赘述。
在另一些实施例中,在j-1不为第二历史时刻的情况下,IMU可以间接利用第二历史时刻的修正后定位数据[p′j-1,v′j-1,q′j-1],确定目标车辆在任一时刻的IMU定位数据[pj,vj,qj]。具体实施时,j-1时刻的IMU定位数据是利用j-2(j不小于2)时刻的IMU定位数据得到的,以此类推,多传感器融合系统在第二历史时刻输出标准定位数据之后的一个数据处理周期内,每一历史时刻得到的IMU定位数据都是,利用第二历史时刻的修正后定位数据或利用第二历史时刻的修正后定位数据积分后得到的IMU定位数据得到的。因此,可以利用第二历史时刻的修正后定位数据或利用第二历史时刻的修正后定位数据积分后得到的IMU定位数据按照上述进行积分处理,确定目标车辆在任一时刻的IMU定位数据。
上述步骤S101~S103只对目标时刻的第二IMU定位数据进行修正,得到目标时刻的修正后定位数据,在一种可能的实施方式中,还可以对第一历史时刻与目标时刻之间的各历史时刻的第三IMU定位数据进行修正。具体实施时,将IMU系统基于IMU测量的IMU运行数据得到的IMU定位数据按照时间顺序存储在定位数据队列中;之后,获取第一历史时刻与目标时刻之间的各历史时刻的第三IMU定位数据;基于定位修正数据和各历史时刻的第三IMU定位数据,确定第一历史时刻与目标时刻之间的各历史时刻的修正后定位数据。
示例性的,利用定位修正数据Δ,并按照公式1~3(此时i可以表示第一历史时刻与目标时刻之间的各历史时刻)对定位数据队列中第一历史时刻与目标时刻之间的各历史时刻的第三IMU定位数据进行修正,能够得到第一历史时刻与目标时刻之间的各历史时刻的修正后定位数据。这里,可以利用各历史时刻的修正后定位数据,还原目标车辆的精准轨迹,以用于精准轨迹生成目标车辆本次自动驾驶过程的运动轨迹。
在一种可能的实施方式中,由于IMU在静止状态下会有一定的噪声和偏差干扰,因此IMU系统在每次输出IMU定位数据之前还需要判断目标车辆是否处于静止状态。
具体实施时,获取基于CAN-BUS的测量数据确定的目标车辆的静止状态检测结果;在静止状态检测结果指示目标车辆未处于静止状态的情况下,基于在任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及目标车辆在所述任一时刻和第二历史时刻与任一时刻之间的各历史时刻的IMU运行数据,确定目标车辆在任一时刻的IMU定位数据。在静止状态检测结果指示目标车辆处于静止状态的情况下,IMU系统可以强制将目标车辆的当前位置信息和姿态信息,分别设置为IMU系统最新输出的、且目标车辆运行过的一个定位数据(可以包括IMU定位数据或者修正后定位数据)中的位置信息和姿态信息,将当前时刻目标车辆的速度,直接设置为零。通过上述处理,能够消除IMU在存在噪声和偏差的情况下对本公开实施例确定的精准的定位结果的影响。
这里,CAN-BUS可以通过获取目标车辆的车轮数据,比如监测车轮转动发出的脉冲数据,判断车轮是否转动,进而判断目标车辆是否处于静止状态。
下面详细介绍基于多传感器融合系统确定标准定位数据的方法:
多传感器融合系统除了需要基本的GNSS,IMU测量的定位数据之外,还需要融合激光雷达和/或相机和/或高精度地图。同时,还要考虑目标车辆的当前状态是否为静止状态,即融合CAN-BUS提供的数据。
多传感器融合系统可以采用卡尔曼滤波框架,采用前向滤波(forward filter)和后向滤波(Backward filter)结合的方法来保证目标车辆定位结果的准确性。
1、前向滤波
多传感器融合系统可以采用误差状态卡尔曼滤波ESKF(Error state Kalmanfilter)的方法来融合不同传感器的测量数据。具体地,可以包括两个步骤:
(1)预测
结合上述步骤S101,多传感器融合系统在获取到IMU测量的目标车辆在第一历史时刻的IMU运行数据(加速度信息am和角速度信息wm),结合运动学模型,预测目标车辆在第一历史时刻的第一定位数据,该第一定位数据的定位精度小于标准定位数据的定位精度。
具体地,多传感器融合系统可以基于公式4,确定目标车辆在第一历史时刻的位置信息;多传感器融合系统可以基于公式5,确定目标车辆在第一历史时刻的速度信息;多传感器融合系统可以基于公式6,确定目标车辆在第一历史时刻的姿态信息。之后,确定出第一历史时刻的预测状态向量X可以为:
X=[p1,v1,q1,ab,wb,g]T
其中,X=[p1,v1,q1,ab,wb,g]T为X=[p1,v1,q1,ab,wb,g]的转置。
需要说明的是,第一定位数据中包括的位置信息、速度信息、姿态信息属于预测状态向量X中的子向量。基于上述旋转矩阵R,加速度的偏差ab,角速度的偏差wb,加速度信息am,角速度信息wm,第一历史时刻与第一历史时刻之后最新获取到观测定位数据的时刻之间的差值Δt′,确定预测状态向量X的转移矩阵:

其中,um为传感器噪声,I为单位矩阵, 为预测状态向量X的修正量。
为预测状态向量X的修正量。
(2)修正
在第一历史时刻之后,多传感器融合系统还可以继续融合其他传感器,比如相机和/或激光雷达和/或GNSS和/或CAN-BUS提供的观测定位数据,示例性的,比如GNSS测量的位置信息和速度信息,相机、激光雷达和高精度地图估计的位置信息和姿态信息,CAN-BUS测量的速度信息等。计算上述预测状态向量X的修正量 并将修正后状态向量记为
并将修正后状态向量记为 则
则

其中 具体计算公式如下:
具体计算公式如下:
K=PHT(HPHT+V)


其中,K表示卡尔曼增益(Kalman gain),P表示预测状态向量X的协方差矩阵, 表示预测状态向量X的修正后协方差矩阵,l为观测定位数据,V为l的观测噪声。h(x)为观测方程,H为h(x)关于
表示预测状态向量X的修正后协方差矩阵,l为观测定位数据,V为l的观测噪声。h(x)为观测方程,H为h(x)关于 的一阶导数,即
的一阶导数,即

其中,HX为h(x)关于X的一阶导数。 为X对
为X对 的一阶导数,对于任何观测定位数据l,
的一阶导数,对于任何观测定位数据l, 保持不变。
保持不变。
2、后向滤波
可以参见图3所示,其为前向滤波和后向滤波过程的示意图。多传感器融合系统可以采用Rauch–Tung–Striebel(RTS)smoother算法,通过缓存第一历史时刻后一段预设时间之间的各历史时刻的预测状态向量Xj、修正后状态向量 Xj的协方差矩阵Pj、Xj的修正后协方差矩阵
Xj的协方差矩阵Pj、Xj的修正后协方差矩阵 Xj的转移矩阵FX,在RTS smoother算法中从j时刻开始递归优化j时刻之前的n个的修正后状态向量,即从
Xj的转移矩阵FX,在RTS smoother算法中从j时刻开始递归优化j时刻之前的n个的修正后状态向量,即从 到
到 确定优化后状态向量
确定优化后状态向量 具体的计算公式为:
具体的计算公式为:


其中,k为递归优化处理的步骤,其范围为0到n,n为正整数;示例性的,可以参见图3所示,其中,递归优化处理步骤为0~6。
Ck为后向滤波的增益, 为后向滤波的增益的转置,
为后向滤波的增益的转置, 为
为 优化后的修正后状态向量的协方差矩阵。
优化后的修正后状态向量的协方差矩阵。
其中,Ck按照如下公式确定:

其中, 为Xj的转移矩阵的转置,
为Xj的转移矩阵的转置, 为
为 的转置。
的转置。
通过上述步骤优化后的修正后状态向量,越接近最大回溯状态 的状态越精确,比如
的状态越精确,比如 的状态要比
的状态要比 精确。多传感器融合系统将
精确。多传感器融合系统将 中的标准定位数据发送给IMU系统。
中的标准定位数据发送给IMU系统。
下面将详细说明,多传感器融合系统与IMU系统异步调度的具体情况:
可以参见图4所示,其为IMU系统工作流程示意图,包括:在第一历史时刻获取IMU测量的目标车辆的加速度信息am和角速度信息wm,并基于公式4~6做积分处理,确定第一IMU定位数据。多传感器融合系统将 中第一历史时刻的标准定位数据[p′,v′,q′]发送给IMU系统,并基于标准定位数据[p′,v′,q′]和第一IMU定位数据之间的差值,确定定位修正数据Δ=[Δp,Δv,Δθ];之后,从定位数据队列中找到IMU系统最新输出的IMU定位数据(第二IMU定位数据),利用定位修正数据Δ和平滑因子进行修正,参见公式1~3,确定修正后定位数据,并将该修正后定位数据存储到定位数据队列中,用于作为IMU下一时刻的定位参考数据,以基于该定位参考数据无延时输出高精度的定位数据。
中第一历史时刻的标准定位数据[p′,v′,q′]发送给IMU系统,并基于标准定位数据[p′,v′,q′]和第一IMU定位数据之间的差值,确定定位修正数据Δ=[Δp,Δv,Δθ];之后,从定位数据队列中找到IMU系统最新输出的IMU定位数据(第二IMU定位数据),利用定位修正数据Δ和平滑因子进行修正,参见公式1~3,确定修正后定位数据,并将该修正后定位数据存储到定位数据队列中,用于作为IMU下一时刻的定位参考数据,以基于该定位参考数据无延时输出高精度的定位数据。
本公开实施例的执行系统为IMU系统,由于IMU系统输出IMU定位数据的频率高于多传感器融合系统输出标准定位数据的频率,因此,利用IMU系统能够保证目标车辆在运行过程中获得无延时的IMU定位数据,同时利用IMU系统提供的第一历史时刻的第一IMU定位数据和多传感器融合系统提供的第一历史时刻的标准定位数据,得到的定位修正数据,修正目标时刻的第二IMU定位数据,能够得到目标时刻的一个具有较高精度的定位数据,即目标时刻的修正后定位数据。之后,利用IMU系统获取修正后定位数据,能够为目标车辆提供低延时的较高精度的定位数据,进而提高自动驾驶的安全性。
本领域技术人员可以理解,在具体实施方式的上述方法中,各步骤的撰写顺序并不意味着严格的执行顺序而对实施过程构成任何限定,各步骤的具体执行顺序应当以其功能和可能的内在逻辑确定。
基于同一发明构思,本公开实施例中还提供了与车辆定位方法对应的车辆定位装置,由于本公开实施例中的车辆定位装置解决问题的原理与本公开实施例上述车辆定位方法相似,因此装置的实施可以参见方法的实施,重复之处不再赘述。
参照图5所示,为本公开实施例提供的一种车辆定位装置的示意图,所述装置包括:获取模块501、第一修正模块502和第二修正模块530;其中,
获取模块501,用于在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据时,获取所述目标车辆在所述第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;所述第二IMU定位数据为最新输出的IMU定位数据;
第一修正模块502,用于基于所述标准定位数据和所述第一IMU定位数据,确定定位修正数据;
第二修正模块503,用于基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
一种可选的实施方式中,所述第二修正模块503,用于基于所述定位修正数据和预设的平滑因子,确定平滑处理后的定位修正数据;基于所述平滑处理后的定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
一种可选的实施方式中,所述车辆定位装置还包括确定模块504,用于获取所述IMU测量到的所述目标车辆在所述任一时刻的IMU运行数据;基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
一种可选的实施方式中,所述修正后定位数据包括以下至少一项:所述目标车辆的修正位置信息、所述目标车辆的修正速度信息、所述目标车辆的修正姿态信息。
一种可选的实施方式中,所述IMU运行数据包括所述目标车辆的加速度信息;
所述确定模块504,用于在所述修正后定位数据指示有所述目标车辆的所述修正速度信息的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正速度信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的加速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的速度信息。
一种可选的实施方式中,所述确定模块504,用于在所述修正后定位数据指示有所述目标车辆的所述修正位置信息和所述修正速度信息的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正位置信息和所述修正速度信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的加速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的位置信息。
一种可选的实施方式中,所述IMU运行数据包括所述目标车辆的角速度;
所述确定模块504,用于在所述修正后定位数据指示有所述目标车辆的所述修正姿态信息的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正姿态信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的角速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的姿态信息。
一种可选的实施方式中,所述确定模块504,用于获取基于控制器局域网总线CAN-BUS的测量数据确定的所述目标车辆的静止状态检测结果;在所述静止状态检测结果指示所述目标车辆未处于静止状态的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
一种可选的实施方式中,所述获取模块501,还用于获取所述第一历史时刻与所述目标时刻之间的各历史时刻的第三IMU定位数据;基于所述定位修正数据和所述各历史时刻的第三IMU定位数据,确定所述第一历史时刻与所述目标时刻之间的各历史时刻的修正后定位数据。
关于车辆定位装置中的各模块的处理流程、以及各模块之间的交互流程的描述可以参照上述车辆定位方法实施例中的相关说明,这里不再详述。
基于同一技术构思,本申请实施例还提供了一种计算机设备。参照图6所示,为本申请实施例提供的计算机设备的结构示意图,包括:
处理器61、存储器62和总线63。其中,存储器62存储有处理器61可执行的机器可读指令,处理器61用于执行存储器62中存储的机器可读指令,所述机器可读指令被处理器61执行时,处理器61执行下述步骤:
S101:在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据后,获取目标车辆在第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;第二IMU定位数据为最新输出的IMU定位数据;
S102:基于标准定位数据和第一IMU定位数据,确定定位修正数据;
S103:基于定位修正数据和第二IMU定位数据,确定目标车辆在目标时刻的修正后定位数据。
上述存储器62包括内存621和外部存储器622;这里的内存621也称内存储器,用于暂时存放处理器61中的运算数据,以及与硬盘等外部存储器622交换的数据,处理器61通过内存621与外部存储器622进行数据交换,当计算机设备运行时,处理器61与存储器62之间通过总线63通信,使得处理器61在执行上述方法实施例中所提及的执行指令。
本公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述方法实施例中所述的车辆定位方法的步骤。其中,该存储介质可以是易失性或非易失的计算机可读取存储介质。
本公开实施例还提供一种计算机程序产品,包括计算机指令,所述计算机指令被处理器执行时实现上述的车辆定位方法的步骤。其中,计算机程序产品可以是任何能实现上述车辆定位方法的产品,该计算机程序产品中对现有技术做出贡献的部分或全部方案可以以软件产品(例如软件开发包(Software Development Kit,SDK))的形式体现,该软件产品可以被存储在一个存储介质中,通过包含的计算机指令使得相关设备或处理器执行上述车辆定位方法的部分或全部步骤。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统和装置的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。在本公开所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,又例如,多个模块或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些通信接口,装置或模块的间接耦合或通信连接,可以是电性,机械或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本公开各个实施例中的各功能模块可以集成在一个处理模块中,也可以是各个模块单独物理存在,也可以两个或两个以上模块集成在一个模块中。
所述功能如果以软件功能模块的形式实现并作为独立的产品销售或使用时,可以存储在一个处理器可执行的非易失的计算机可读取存储介质中。基于这样的理解,本公开的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本公开各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(Read-OnlyMemory,ROM)、随机存取存储器(Random Access Memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
最后应说明的是:以上所述实施例,仅为本公开的具体实施方式,用以说明本公开的技术方案,而非对其限制,本公开的保护范围并不局限于此,尽管参照前述实施例对本公开进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本公开实施例技术方案的精神和范围,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应所述以权利要求的保护范围为准。
本公开实施例提供了一种车辆定位方法、装置、存储介质及计算机程序产品,具体如下:
TS1、一种车辆定位方法,其中,所述方法包括:
在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据后,获取所述目标车辆在所述第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;所述第二IMU定位数据为最新输出的IMU定位数据;
基于所述标准定位数据和所述第一IMU定位数据,确定定位修正数据;
基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
TS2、根据TS1所述的方法,其中,所述基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据,包括:
基于所述定位修正数据和预设的平滑因子,确定平滑处理后的定位修正数据;
基于所述平滑处理后的定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
TS3、根据TS1所述的方法,其中,根据以下步骤确定所述目标车辆在任一时刻的IMU定位数据:
获取所述IMU测量到的所述目标车辆在所述任一时刻的IMU运行数据;
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
TS4、根据TS3所述的方法,其中,所述修正后定位数据包括以下至少一项:所述目标车辆的修正位置信息、所述目标车辆的修正速度信息、所述目标车辆的修正姿态信息。
TS5、根据TS4所述的方法,其中,所述IMU运行数据包括所述目标车辆的加速度信息;
在所述修正后定位数据指示有所述目标车辆的所述修正速度信息的情况下,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正速度信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的加速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的速度信息。
TS6、根据TS5所述的方法,其中,在所述修正后定位数据指示有所述目标车辆的所述修正位置信息和所述修正速度信息的情况下,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正位置信息和所述修正速度信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的加速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的位置信息。
TS7、根据TS4所述的方法,其中,所述IMU运行数据包括所述目标车辆的角速度;
在所述修正后定位数据指示有所述目标车辆的所述修正姿态信息的情况下,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的所述修正姿态信息,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的角速度信息,确定所述目标车辆在所述任一时刻的IMU定位数据中的姿态信息。
TS8、根据TS3~TS7任一所述的方法,其中,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
获取基于控制器局域网总线CAN-BUS的测量数据确定的所述目标车辆的静止状态检测结果;
在所述静止状态检测结果指示所述目标车辆未处于静止状态的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
TS9、根据TS1所述的方法,其中,所述方法还包括:
获取所述第一历史时刻与所述目标时刻之间的各历史时刻的第三IMU定位数据;
基于所述定位修正数据和所述各历史时刻的第三IMU定位数据,确定所述第一历史时刻与所述目标时刻之间的各历史时刻的修正后定位数据。
TS10、一种车辆定位装置,其中,所述装置包括:
获取模块,用于在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据时,获取所述目标车辆在所述第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;所述第二IMU定位数据为最新输出的IMU定位数据;
第一修正模块,用于基于所述标准定位数据和所述第一IMU定位数据,确定定位修正数据;
第二修正模块,用于基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
TS11、一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如权利要求TS1至TS9任意一项所述的车辆定位方法的步骤。
TS12、一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如TS1至TS9任意一项所述的车辆定位方法的步骤。
TS13、一种计算机程序产品,包括计算机指令,其特征在于,所述计算机指令被处理器执行时实现如权利要求TS1至TS9中任意一项所述的车辆定位方法的步骤。
Claims (10)
1.一种车辆定位方法,其特征在于,包括:
在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据后,获取所述目标车辆在所述第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;所述第二IMU定位数据为最新输出的IMU定位数据;
基于所述标准定位数据和所述第一IMU定位数据,确定定位修正数据;
基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
2.根据权利要求1所述的方法,其特征在于,所述基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据,包括:
基于所述定位修正数据和预设的平滑因子,确定平滑处理后的定位修正数据;
基于所述平滑处理后的定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
3.根据权利要求1所述的方法,其特征在于,根据以下步骤确定所述目标车辆在任一时刻的IMU定位数据:
获取所述IMU测量到的所述目标车辆在所述任一时刻的IMU运行数据;
基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻、和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
4.根据权利要求3所述的方法,其特征在于,所述修正后定位数据包括以下至少一项:所述目标车辆的修正位置信息、所述目标车辆的修正速度信息、所述目标车辆的修正姿态信息。
5.根据权利要求3~4任一所述的方法,其特征在于,所述基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据,包括:
获取基于控制器局域网总线CAN-BUS的测量数据确定的所述目标车辆的静止状态检测结果;
在所述静止状态检测结果指示所述目标车辆未处于静止状态的情况下,基于在所述任一时刻之前最近一次得到的、在第二历史时刻的修正后定位数据,以及所述目标车辆在所述任一时刻和所述第二历史时刻与所述任一时刻之间的各历史时刻的IMU运行数据,确定所述目标车辆在所述任一时刻的IMU定位数据。
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
获取所述第一历史时刻与所述目标时刻之间的各历史时刻的第三IMU定位数据;
基于所述定位修正数据和所述各历史时刻的第三IMU定位数据,确定所述第一历史时刻与所述目标时刻之间的各历史时刻的修正后定位数据。
7.一种车辆定位装置,其特征在于,包括:
获取模块,用于在获取到多传感器融合系统确定的目标车辆在第一历史时刻的标准定位数据时,获取所述目标车辆在所述第一历史时刻的第一惯性测量单元IMU定位数据和在目标时刻的第二IMU定位数据;所述第二IMU定位数据为最新输出的IMU定位数据;
第一修正模块,用于基于所述标准定位数据和所述第一IMU定位数据,确定定位修正数据;
第二修正模块,用于基于所述定位修正数据和所述第二IMU定位数据,确定所述目标车辆在目标时刻的修正后定位数据。
8.一种计算机设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如权利要求1至6任意一项所述的车辆定位方法的步骤。
9.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如权利要求1至6任意一项所述的车辆定位方法的步骤。
10.一种计算机程序产品,包括计算机指令,其特征在于,所述计算机指令被处理器执行时实现如权利要求1至6中任意一项所述的车辆定位方法的步骤。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110564851.9A CN113218389B (zh) | 2021-05-24 | 2021-05-24 | 一种车辆定位方法、装置、存储介质及计算机程序产品 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110564851.9A CN113218389B (zh) | 2021-05-24 | 2021-05-24 | 一种车辆定位方法、装置、存储介质及计算机程序产品 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113218389A true CN113218389A (zh) | 2021-08-06 |
| CN113218389B CN113218389B (zh) | 2024-05-17 |
Family
ID=77098072
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110564851.9A Active CN113218389B (zh) | 2021-05-24 | 2021-05-24 | 一种车辆定位方法、装置、存储介质及计算机程序产品 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113218389B (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113656521A (zh) * | 2021-08-16 | 2021-11-16 | 智道网联科技(北京)有限公司 | 车辆位置信息确定方法及相关装置 |
| CN117782114A (zh) * | 2024-02-28 | 2024-03-29 | 福瑞泰克智能系统有限公司 | 车辆定位校正方法、装置、计算机设备和存储介质 |
Citations (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104457789A (zh) * | 2014-11-26 | 2015-03-25 | 深圳市华颖泰科电子技术有限公司 | 基于惯性导航的参数修正方法和装置 |
| JP2015102330A (ja) * | 2013-11-21 | 2015-06-04 | 古野電気株式会社 | 移動情報算出装置、移動情報算出方法、移動情報算出プログラム、および移動体 |
| JP2015148450A (ja) * | 2014-02-05 | 2015-08-20 | 古野電気株式会社 | センサ誤差補正装置、imu較正システム、imu較正方法、および、imu較正プログラム |
| CN106595654A (zh) * | 2016-12-13 | 2017-04-26 | 天津大学 | 一种激光跟踪测量系统连续跟踪测量方法及装置 |
| CN109099912A (zh) * | 2017-08-11 | 2018-12-28 | 黄润芳 | 室外精确定位导航方法、装置、电子设备及存储介质 |
| CN109870157A (zh) * | 2019-02-20 | 2019-06-11 | 苏州风图智能科技有限公司 | 确定车体位姿的方法及装置、制图方法 |
| CN109931939A (zh) * | 2019-02-27 | 2019-06-25 | 杭州飞步科技有限公司 | 车辆的定位方法、装置、设备及计算机可读存储介质 |
| CN110160524A (zh) * | 2019-05-23 | 2019-08-23 | 深圳市道通智能航空技术有限公司 | 一种惯性导航系统的传感器数据获取方法及装置 |
| CN110163909A (zh) * | 2018-02-12 | 2019-08-23 | 北京三星通信技术研究有限公司 | 用于获得设备位姿的方法、装置和存储介质 |
| CN110231028A (zh) * | 2018-03-05 | 2019-09-13 | 北京京东尚科信息技术有限公司 | 飞行器导航方法、装置和系统 |
| CN110967038A (zh) * | 2019-11-25 | 2020-04-07 | 广州小鹏汽车科技有限公司 | 车辆定位方法、车辆定位装置和车辆 |
| CN110986997A (zh) * | 2019-10-25 | 2020-04-10 | 杭州十域科技有限公司 | 一种提高室内惯性导航精度的方法及系统 |
| CN110986930A (zh) * | 2019-11-29 | 2020-04-10 | 北京三快在线科技有限公司 | 设备定位方法、装置、电子设备及存储介质 |
| CN111121768A (zh) * | 2019-12-23 | 2020-05-08 | 深圳市优必选科技股份有限公司 | 一种机器人位姿估计方法、装置、可读存储介质及机器人 |
| CN111750854A (zh) * | 2020-07-22 | 2020-10-09 | 上海康莫巴智能科技有限公司 | 车辆定位方法、装置、系统及存储介质 |
| CN111982106A (zh) * | 2020-08-28 | 2020-11-24 | 北京信息科技大学 | 导航方法、装置、存储介质及电子装置 |
| CN112097768A (zh) * | 2020-11-17 | 2020-12-18 | 深圳市优必选科技股份有限公司 | 机器人位姿的确定方法、装置、机器人及存储介质 |
| CN112747754A (zh) * | 2019-10-30 | 2021-05-04 | 北京初速度科技有限公司 | 一种多传感器数据的融合方法、装置及系统 |
| CN112781586A (zh) * | 2020-12-29 | 2021-05-11 | 上海商汤临港智能科技有限公司 | 一种位姿数据的确定方法、装置、电子设备及车辆 |
-
2021
- 2021-05-24 CN CN202110564851.9A patent/CN113218389B/zh active Active
Patent Citations (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015102330A (ja) * | 2013-11-21 | 2015-06-04 | 古野電気株式会社 | 移動情報算出装置、移動情報算出方法、移動情報算出プログラム、および移動体 |
| JP2015148450A (ja) * | 2014-02-05 | 2015-08-20 | 古野電気株式会社 | センサ誤差補正装置、imu較正システム、imu較正方法、および、imu較正プログラム |
| CN104457789A (zh) * | 2014-11-26 | 2015-03-25 | 深圳市华颖泰科电子技术有限公司 | 基于惯性导航的参数修正方法和装置 |
| CN106595654A (zh) * | 2016-12-13 | 2017-04-26 | 天津大学 | 一种激光跟踪测量系统连续跟踪测量方法及装置 |
| CN109099912A (zh) * | 2017-08-11 | 2018-12-28 | 黄润芳 | 室外精确定位导航方法、装置、电子设备及存储介质 |
| CN110163909A (zh) * | 2018-02-12 | 2019-08-23 | 北京三星通信技术研究有限公司 | 用于获得设备位姿的方法、装置和存储介质 |
| CN110231028A (zh) * | 2018-03-05 | 2019-09-13 | 北京京东尚科信息技术有限公司 | 飞行器导航方法、装置和系统 |
| CN109870157A (zh) * | 2019-02-20 | 2019-06-11 | 苏州风图智能科技有限公司 | 确定车体位姿的方法及装置、制图方法 |
| CN109931939A (zh) * | 2019-02-27 | 2019-06-25 | 杭州飞步科技有限公司 | 车辆的定位方法、装置、设备及计算机可读存储介质 |
| CN110160524A (zh) * | 2019-05-23 | 2019-08-23 | 深圳市道通智能航空技术有限公司 | 一种惯性导航系统的传感器数据获取方法及装置 |
| CN110986997A (zh) * | 2019-10-25 | 2020-04-10 | 杭州十域科技有限公司 | 一种提高室内惯性导航精度的方法及系统 |
| CN112747754A (zh) * | 2019-10-30 | 2021-05-04 | 北京初速度科技有限公司 | 一种多传感器数据的融合方法、装置及系统 |
| CN110967038A (zh) * | 2019-11-25 | 2020-04-07 | 广州小鹏汽车科技有限公司 | 车辆定位方法、车辆定位装置和车辆 |
| CN110986930A (zh) * | 2019-11-29 | 2020-04-10 | 北京三快在线科技有限公司 | 设备定位方法、装置、电子设备及存储介质 |
| CN111121768A (zh) * | 2019-12-23 | 2020-05-08 | 深圳市优必选科技股份有限公司 | 一种机器人位姿估计方法、装置、可读存储介质及机器人 |
| CN111750854A (zh) * | 2020-07-22 | 2020-10-09 | 上海康莫巴智能科技有限公司 | 车辆定位方法、装置、系统及存储介质 |
| CN111982106A (zh) * | 2020-08-28 | 2020-11-24 | 北京信息科技大学 | 导航方法、装置、存储介质及电子装置 |
| CN112097768A (zh) * | 2020-11-17 | 2020-12-18 | 深圳市优必选科技股份有限公司 | 机器人位姿的确定方法、装置、机器人及存储介质 |
| CN112781586A (zh) * | 2020-12-29 | 2021-05-11 | 上海商汤临港智能科技有限公司 | 一种位姿数据的确定方法、装置、电子设备及车辆 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113656521A (zh) * | 2021-08-16 | 2021-11-16 | 智道网联科技(北京)有限公司 | 车辆位置信息确定方法及相关装置 |
| CN117782114A (zh) * | 2024-02-28 | 2024-03-29 | 福瑞泰克智能系统有限公司 | 车辆定位校正方法、装置、计算机设备和存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113218389B (zh) | 2024-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Ludwig et al. | Comparison of Euler estimate using extended Kalman filter, Madgwick and Mahony on quadcopter flight data | |
| US10295365B2 (en) | State estimation for aerial vehicles using multi-sensor fusion | |
| EP3842750A2 (en) | Positioning method, electronic device, vehicle device, and autonomous vehicle | |
| CN109991636A (zh) | 基于gps、imu以及双目视觉的地图构建方法及系统 | |
| Shen et al. | Optical Flow Sensor/INS/Magnetometer Integrated Navigation System for MAV in GPS‐Denied Environment | |
| Rad et al. | Optimal attitude and position determination by integration of INS, star tracker, and horizon sensor | |
| US20140222369A1 (en) | Simplified method for estimating the orientation of an object, and attitude sensor implementing such a method | |
| RU2762143C2 (ru) | Система определения курса и углового пространственного положения, выполненная с возможностью функционирования в полярной области | |
| JP2012173190A (ja) | 測位システム、測位方法 | |
| CN103884340B (zh) | 一种深空探测定点软着陆过程的信息融合导航方法 | |
| CN109141411B (zh) | 定位方法、定位装置、移动机器人及存储介质 | |
| CN110929402A (zh) | 一种基于不确定分析的概率地形估计方法 | |
| JP2019078560A (ja) | ジャイロセンサのオフセット補正装置、オフセット補正プログラム、歩行者自律航法装置 | |
| CN113218389A (zh) | 一种车辆定位方法、装置、存储介质及计算机程序产品 | |
| CN109612476A (zh) | 基于惯性导航技术的地图重构方法、装置、惯性导航系统及计算机存储介质 | |
| CN117739972B (zh) | 一种无全球卫星定位系统的无人机进近阶段定位方法 | |
| CN107576977A (zh) | 基于多源信息自适应融合的无人机导航系统及方法 | |
| Wagner et al. | Reevaluation of algorithmic basics for ZUPT-based pedestrian navigation | |
| CN108871319A (zh) | 一种基于地球重力场与地磁场序贯修正的姿态解算方法 | |
| Lopes et al. | Attitude determination of highly dynamic fixed-wing uavs with gps/mems-ahrs integration | |
| CN113029173A (zh) | 车辆导航方法及装置 | |
| Koch et al. | Multi-sensor robust relative estimation framework for GPS-denied multirotor aircraft | |
| CN111982126A (zh) | 一种全源BeiDou/SINS弹性状态观测器模型设计方法 | |
| Zhe et al. | Adaptive complementary filtering algorithm for imu based on mems | |
| Damerius et al. | A generic inertial navigation system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |