CN112973042A - Man-machine integrated treadmill control method - Google Patents
Man-machine integrated treadmill control method Download PDFInfo
- Publication number
- CN112973042A CN112973042A CN202110342706.6A CN202110342706A CN112973042A CN 112973042 A CN112973042 A CN 112973042A CN 202110342706 A CN202110342706 A CN 202110342706A CN 112973042 A CN112973042 A CN 112973042A
- Authority
- CN
- China
- Prior art keywords
- treadmill
- user
- output torque
- servo motor
- running
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 13
- 230000005484 gravity Effects 0.000 claims description 20
- 230000001133 acceleration Effects 0.000 claims description 15
- 230000005540 biological transmission Effects 0.000 claims description 11
- 238000005096 rolling process Methods 0.000 claims description 2
- 230000002159 abnormal effect Effects 0.000 claims 1
- 230000033001 locomotion Effects 0.000 abstract description 5
- 239000000047 product Substances 0.000 description 4
- 125000004122 cyclic group Chemical group 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 108010084652 homeobox protein PITX1 Proteins 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
Images
Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0087—Electric or electronic controls for exercising apparatus of groups A63B21/00 - A63B23/00, e.g. controlling load
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/02—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with movable endless bands, e.g. treadmills
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/40—Acceleration
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/50—Force related parameters
- A63B2220/51—Force
- A63B2220/52—Weight, e.g. weight distribution
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/50—Force related parameters
- A63B2220/56—Pressure
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/83—Special sensors, transducers or devices therefor characterised by the position of the sensor
- A63B2220/833—Sensors arranged on the exercise apparatus or sports implement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/83—Special sensors, transducers or devices therefor characterised by the position of the sensor
- A63B2220/836—Sensors arranged on the body of the user
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Rehabilitation Tools (AREA)
Abstract
This patent is only to the control technology of the linear motion treadmill that has the runway, the control purpose of realizing man-machine unification on such treadmill, how to realize carrying out accurate control to the servo motor on the treadmill in the most fundamental task, furthermore, how to realize carrying out accurate control to servo motor's output torque, control servo motor output and user's weight and motion trend assorted moment of torsion size and direction promptly, furthermore, how to obtain the signal and carry out processing to the signal through the sensor, with size and the direction that obtains servo motor control module's output torque control signal.
Description
Technical Field
The patent relates to a treadmill control method, which can theoretically realize in-situ walking, running, starting, stopping, accelerating, uniform speed and decelerating which are not different from reality, the process is completely controlled by a user independently, so the process is called as human-machine integration, and the technology can be applied to the related fields of fitness, entertainment, virtual reality, intelligent wearing and the like.
Background
In the field of conventional fitness treadmills, there are mainly powered treadmills and unpowered treadmills, both of which do not have any interaction with the user. The power treadmill only outputs power, and a user only passively runs according to the rotating speed of the treadmill. The unpowered treadmill forces a user to run by means of the inertia of the rotation of the flywheel, the runway of the treadmill is high in front and low in back, the user not only maintains the rotation of the flywheel by the output power of the flywheel, but also runs under the driving of the inertia of the flywheel, but the inertia of the flywheel is inconsistent with the inertia of the human body, the running experience is greatly different from the running experience in reality, and the technology is only used as a cheap substitute of the power treadmill. Both of these treadmills have poor safety and comfort.
In the emerging field of virtual reality and intelligent wearing, a so-called virtual reality treadmill exists, although various structural forms exist, the basic principle is that a user is fixed in place, the ground is made very smooth, the friction is close to zero as much as possible, the user can wear special shoes to run in place, in fact, the user slides in place, the resistance and inertia of running in reality do not exist, the use experience is still very poor, and the level of the virtual reality is far from being achieved. The treadmill does not have a track of a traditional treadmill, can realize 360-degree omnidirectional running, but still does not solve essential problems.
Disclosure of Invention
This patent is only to the control technology of the linear motion treadmill that has the runway, the control purpose of realizing man-machine unification on such treadmill, how to realize carrying out accurate control to the servo motor on the treadmill in the most fundamental task, furthermore, how to realize carrying out accurate control to servo motor's output torque, control servo motor output and user's weight and motion trend assorted moment of torsion size and direction promptly, furthermore, how to obtain the signal and carry out processing to the signal through the sensor, with size and the direction that obtains servo motor control module's output torque control signal.
In the actual running process of a human body, the human body does not have sliding friction with the ground, if the resistance of extremely small wind is not considered, the resistance felt by the human body is zero, and the inertia of the human body is maintained and changed when the human body runs. The dynamic analysis of the running process of a human body can easily draw a conclusion that when the human body runs, the gravity center vibrates up and down on a horizontal line in a sine wave-like form, the sine wave-like vibration can certainly consume the kinetic energy of the human body, and the consumed kinetic energy of the human body is essentially the energy consumed by the impact between the front foot and the ground when the front foot falls to the ground, so that in an ideal constant-speed running state, the action of pedaling the back foot to the ground supplements the energy consumed by the impact between the front foot and the ground, and the constant-speed running of the human body is maintained from beginning to end. Similarly, similar laws are followed during start, stop, acceleration and deceleration, except that the energy consumed by landing the front foot and the energy replenished by the rear foot are balanced. The most core problem is to control the servo motor of the treadmill to output corresponding torque and direction in the cyclic action of the front foot landing and the rear foot landing.
The first problem to be solved is to make the friction of the internal transmission system of the treadmill return to zero, and further, to make the servo motor output a torque which just can offset the torque formed by the friction, the torque is determined by the transmission system of the treadmill itself, is a fixed and unchangeable fixed quantity, and can be accurately measured through the self-checking of the system, and is set as t 1.
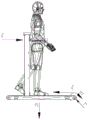
The second problem to be solved is to make the friction between the running belt and the bearing bottom plate of the running machine return to zero, and further to make the servo motor output a torque which just can offset the torque generated by the friction. The torque is a product of four parameters of the radius r of the roller of the running belt, the friction coefficient k, the acceleration of gravity g and the gravity m of the user, and is set to t2, i.e., t2= rkgm. As shown in fig. 1, a gravity sensor is installed inside the treadmill, and the downward gravity m applied by the user to the treadmill can be measured in real time, and it should be further noted that the friction coefficient k, the gravity acceleration g and the roller radius r of the running belt are fixed and constant quantities, but the gravity m is variable, because the gravity m measured by the gravity sensor varies in real time with the running posture of the user although the weight of the user is fixed, so that the torque is proportional to the downward gravity applied by the user to the treadmill. It is further noted that the unit of gravity m here is kilograms.
The third problem to be solved is how to realize virtual inertia control, that is, how to enable the treadmill to sense the movement trend of the user and output torque with corresponding magnitude and direction without delay, which is the core problem to be solved by the patent. As shown in figure 1, a gravity sensor is arranged inside the running machine to measure the gravity m applied to the running machine by a user, a pulling and pressing sensor is arranged between the waist of the user and the running machine to measure the running force f applied to the running machine by the user, an acceleration sensor is arranged inside a rolling shaft of a running belt of the running machine to measure the acceleration a of the running belt, after the first problem and the second problem are solved, the user runs on the running machine without virtual inertia control, which is equal to the running on a smooth surface with zero friction force, because the inertia of the user is far larger than that of a transmission part inside the running machine, the relatively small running force f can generate relatively large acceleration a, meanwhile, the gravity m, the angular acceleration a and the running force f have the same change trend, and the product ma of the gravity m and the acceleration a is far larger than the running force f, i.e., ma > f, and the virtual inertia control is performed by introducing ma = f into the roller radius r of the running belt, i.e., by making the torque mar equal to the torque fr, and further, by making the difference between mar and fr a part of the output torque of the servo motor, the virtual inertia control, i.e., the virtual inertia control torque t3= r (f-ma), is performed. It is further noted that in the case of a typical user having greater inertia than the internal transmission of the treadmill, the direction of torque t3 is opposite to the direction of torque t1, t2 during acceleration and the direction of torque t3 is the same as the direction of torque t1, t2 during deceleration.
In combination with the above analysis, it is possible to derive the servomotor output torque T = T1+ T2+ T3= T1+ rkgm + r (f-ma), which for convenience of description is intended to ignore the transmission ratio s between the servomotor of the treadmill and the roller of the running belt, since T1 is the friction force generation of the moving parts inside the treadmill, directly obtained by the system self-test, regardless of the transmission ratio s, and T2 and T3 are both related to the transmission ratio s, further, T = T1+ rkgm + sr (f-ma), the output torque of the servomotor is formed by the three-part dynamic combination in the above equation, further, since T1, s, r, k, g are all quantitative, and only m, f, a are dynamically changing variables measured by the sensor in time, if srkg is set as k1, the product of sr is set as k product 2, i.e., T = T1+ k1 × m + k2 × (f-ma).
Drawings
Fig. 1 is a force analysis diagram of the present patent.
Claims (6)
1. A man-machine integrated treadmill control method is characterized in that a treadmill is connected with the waist of a user through a tension and pressure sensor to measure the advancing force applied to the treadmill by the user in the horizontal direction, a gravity sensor is arranged inside the running machine to measure the gravity applied to the running machine by a user in the vertical direction, an acceleration sensor is arranged on a rolling shaft of the running machine to measure the acceleration of the running machine, a servo motor is arranged inside the running machine, the output torque of the servo motor is composed of three parts, the first part of torque is used for overcoming the friction force of a transmission part inside the running machine, the second part of torque is used for overcoming the friction force between a running belt and a bearing bottom plate generated by the gravity of a user, the third part of torque is obtained by carrying out differential operation on the product of the acceleration and the gravity and the running force, and the dynamic combination of the three parts of torque forms the output torque of the servo motor.
2. A method as claimed in any preceding claim, wherein the first portion of the output torque of the servo motor is obtained by the treadmill control system through a system self-test.
3. The method of claim, further comprising the step of determining the second portion of the output torque of the servo motor as a function of the coefficient of friction between the tread belt and the load bearing deck, the radius of the roller of the tread belt, the acceleration due to gravity, the gear ratio between the servo motor and the roller of the tread belt, and the 5-fold factor of the downward force of the user on the treadmill, wherein the second portion of the output torque of the servo motor is proportional to the downward force of the user on the treadmill.
4. The method of claim, further comprising the step of controlling the treadmill by using a human-machine interface, wherein the third portion of the output torque of the servo motor is determined by the transmission ratio between the servo motor and the roller of the treadmill, the radius of the roller of the treadmill, and the difference between the product of the acceleration and the gravitational force and the running force, and is proportional to the difference between the product of the acceleration and the gravitational force and the running force.
5. The method of claim one of the above and further comprising the step of controlling the servo motor to provide a third portion of the output torque that is opposite in direction to the first portion of the output torque and the second portion of the output torque when the user is accelerating and is in the same direction as the first portion of the output torque and the second portion of the output torque when the user is decelerating, under conditions where the normal user inertia is greater than the inertia of the internal transmission of the treadmill.
6. The method of claim one of the above and other features, wherein the third portion of the output torque of the servo motor is in the same direction as the first portion of the output torque and the second portion of the output torque when the user is accelerating and in the opposite direction when the user is decelerating, in the case where the abnormal user inertia is less than the inertia of the internal transmission of the treadmill.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110342706.6A CN112973042A (en) | 2021-03-30 | 2021-03-30 | Man-machine integrated treadmill control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110342706.6A CN112973042A (en) | 2021-03-30 | 2021-03-30 | Man-machine integrated treadmill control method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112973042A true CN112973042A (en) | 2021-06-18 |
Family
ID=76338418
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110342706.6A Pending CN112973042A (en) | 2021-03-30 | 2021-03-30 | Man-machine integrated treadmill control method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112973042A (en) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW200800337A (en) * | 2006-06-30 | 2008-01-01 | Sing Lin Technology Co Ltd | System for training muscle strength and controlling measurement of treadmill |
| WO2012016132A1 (en) * | 2010-07-29 | 2012-02-02 | George Burger | Single belt omni directional treadmill |
| CN102961847A (en) * | 2012-11-27 | 2013-03-13 | 上海大学 | Speed following self-adaptive control method and device for treadmill |
| US20130158444A1 (en) * | 2011-12-20 | 2013-06-20 | Massachusetts Institute Of Technology | Robotic System for Simulating a Wearable Device and Method of Use |
| US9409053B1 (en) * | 2015-07-13 | 2016-08-09 | Bml Productions, Inc. | Exercise data collection system |
| CN108095725A (en) * | 2017-12-20 | 2018-06-01 | 中国科学院合肥物质科学研究院 | A kind of Human Stamina integrated test set and its application method |
-
2021
- 2021-03-30 CN CN202110342706.6A patent/CN112973042A/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW200800337A (en) * | 2006-06-30 | 2008-01-01 | Sing Lin Technology Co Ltd | System for training muscle strength and controlling measurement of treadmill |
| WO2012016132A1 (en) * | 2010-07-29 | 2012-02-02 | George Burger | Single belt omni directional treadmill |
| US20130158444A1 (en) * | 2011-12-20 | 2013-06-20 | Massachusetts Institute Of Technology | Robotic System for Simulating a Wearable Device and Method of Use |
| CN102961847A (en) * | 2012-11-27 | 2013-03-13 | 上海大学 | Speed following self-adaptive control method and device for treadmill |
| US9409053B1 (en) * | 2015-07-13 | 2016-08-09 | Bml Productions, Inc. | Exercise data collection system |
| CN108095725A (en) * | 2017-12-20 | 2018-06-01 | 中国科学院合肥物质科学研究院 | A kind of Human Stamina integrated test set and its application method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7862476B2 (en) | Exercise device | |
| US7976434B2 (en) | Exercise device | |
| JP7033629B2 (en) | Cordless treadmill | |
| TWI726984B (en) | Pedal drive system | |
| US7833135B2 (en) | Stationary exercise equipment | |
| US7648446B2 (en) | System and method for electronically controlling resistance of an exercise machine | |
| US8016060B2 (en) | Vehicle | |
| CN114423676B (en) | Electric vehicle, method for driving a vehicle, and computer readable medium | |
| US7727125B2 (en) | Exercise machine and method for use in training selected muscle groups | |
| CN106476974A (en) | A kind of power-assisted carries out method, electric motor car and its controller | |
| WO2008002644A2 (en) | Closed-loop power dissipation control for cardio-fitness equipment | |
| CN102424075B (en) | Rigid flexible coupled wirewalking robot based on balance beam | |
| US6324464B1 (en) | Intelligent system for regulating the speed of an electric motorcycle | |
| CN105396264B (en) | A kind of full mimicry exercycle with generating function | |
| CN105377386B (en) | Amusement park lift declines takes system and correlation technique | |
| CN105102261B (en) | Electric car | |
| CN110237493B (en) | Riding simulation platform with bicycle posture control function | |
| CN104260817A (en) | Electric power device of bicycle | |
| CN103612687A (en) | Self-balancing swing walking robot driven by axial and radial direction counter-force | |
| CN107848527A (en) | Turn inside diameter control device | |
| CN109941249A (en) | A kind of controllable type pedal sense simulator | |
| CN112973042A (en) | Man-machine integrated treadmill control method | |
| CN107648803A (en) | Universal treadmill | |
| CN113058207B (en) | Control method of omni-directional virtual reality running machine with virtual steering | |
| KR20090126159A (en) | Virtual reality cycling machine with electric power generation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20210618 |
|
| WD01 | Invention patent application deemed withdrawn after publication |