CN112767725B - 站点信息确定方法及装置 - Google Patents
站点信息确定方法及装置 Download PDFInfo
- Publication number
- CN112767725B CN112767725B CN202011603515.2A CN202011603515A CN112767725B CN 112767725 B CN112767725 B CN 112767725B CN 202011603515 A CN202011603515 A CN 202011603515A CN 112767725 B CN112767725 B CN 112767725B
- Authority
- CN
- China
- Prior art keywords
- station
- virtual
- road section
- road
- determining
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 60
- 238000004590 computer program Methods 0.000 claims description 16
- 238000012545 processing Methods 0.000 claims description 14
- 238000010586 diagram Methods 0.000 description 17
- 238000004891 communication Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 230000002349 favourable effect Effects 0.000 description 7
- 230000009286 beneficial effect Effects 0.000 description 6
- 238000004422 calculation algorithm Methods 0.000 description 6
- 238000003032 molecular docking Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 238000003491 array Methods 0.000 description 1
- 238000013473 artificial intelligence Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000002372 labelling Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000010561 standard procedure Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000007306 turnover Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096725—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information generates an automatic action on the vehicle control
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Abstract
本申请公开了一种站点信息确定方法及装置,涉及智能交通中的自动泊车领域。具体实现方案为:从地图数据中获取第一路段的道路信息,道路信息包括第一路段的宽度和形状,第一路段上不存在实际站点,或者第一路段上的实际站点的尺寸和/或形状不满足预设条件。根据道路信息,生成虚拟站点的站点信息,虚拟站点位于第一路段,站点信息中包括虚拟站点的形状、虚拟站点的尺寸。通过在第一道路中不存在实际站点,或者实际站点不满足进出站要求时,根据第一路段的道路信息在道路中确定虚拟站点,并生成虚拟站点的站点信息,以使车辆按照该站点信息进行进出站,从而有效提升了车辆进出站的成功率。
Description
技术领域
本申请涉及智能交通中的自动泊车领域,尤其涉及一种站点信息确定方法及装置。
背景技术
港湾站点进出站是自动驾驶车辆需要的关键能力之一,尤其是对自动驾驶公交车而言。
目前,自动驾驶的车辆,通常是根据地图中标注的港湾信息进行路径规划,以实现在港湾站点的进出站,以及现有技术中地图中标注的港湾信息,是严格依赖于实际的港湾条件的。
然而,当实际的港湾条件较差,不利于车辆进出站时,若根据实际的港湾条件在地图中进行标注,会导致车辆进出站的成功率较低。
发明内容
本申请提供了一种用于站点信息确定的方法、装置、设备以及存储介质。
根据本申请的第一方面,提供了一种站点信息确定方法,包括:
从地图数据中获取第一路段的道路信息,所述道路信息包括所述第一路段的宽度和形状,所述第一路段上不存在实际站点,或者所述第一路段上的实际站点的尺寸和/或形状不满足预设条件;
根据所述道路信息,生成虚拟站点的站点信息,所述虚拟站点位于所述第一路段,所述站点信息中包括所述虚拟站点的形状、所述虚拟站点的尺寸。
根据本申请的第二方面,提供了一种站点信息确定装置,包括:
获取模块,用于从地图数据中获取第一路段的道路信息,所述道路信息包括所述第一路段的宽度和形状,所述第一路段上不存在实际站点,或者所述第一路段上的实际站点的尺寸和/或形状不满足预设条件;
生成模块,用于根据所述道路信息,生成虚拟站点的站点信息,所述虚拟站点位于所述第一路段,所述站点信息中包括所述虚拟站点的形状、所述虚拟站点的尺寸。
根据本申请的第三方面,提供了一种电子设备,包括:
至少一个处理器;以及
与所述至少一个处理器通信连接的存储器;其中,
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行第一方面所述的方法。
根据本申请的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行第一方面所述的方法。
根据本申请的第五方面,提供了一种计算机程序产品,所述程序产品包括:计算机程序,所述计算机程序存储在可读存储介质中,电子设备的至少一个处理器可以从所述可读存储介质读取所述计算机程序,所述至少一个处理器执行所述计算机程序使得电子设备执行第一方面所述的方法。
根据本申请的技术有效提升了车辆进出站的成功率。
应当理解,本部分所描述的内容并非旨在标识本申请的实施例的关键或重要特征,也不用于限制本申请的范围。本申请的其它特征将通过以下的说明书而变得容易理解。
附图说明
附图用于更好地理解本方案,不构成对本申请的限定。其中:
图1为本申请实施例提供的标准的港湾示意图;
图2为本申请实施例提供的尺寸较小的港湾示意图;
图3为本申请实施例提供的站点信息确定方法的流程图;
图4为本申请实施例提供的站点信息确定方法的流程图二;
图5为本申请实施例提供的第一路段的划分示意图;
图6为本申请实施例提供的确定虚拟站点的实现示意图一;
图7为本申请实施例提供的确定虚拟站点的实现示意图二;
图8为本申请实施例提供的站点信息确定方法的流程图三;
图9为本申请实施例提供的确定虚拟站点的实现示意图三;
图10为本申请实施例提供的确定虚拟站点的实现示意图四;
图11为本申请实施例提供的车辆进出站的示意图;
图12为本申请实施例的站点信息确定装置的结构示意图;
图13是用来实现本申请实施例的站点信息确定方法的电子设备的框图。
具体实施方式
以下结合附图对本申请的示范性实施例做出说明,其中包括本申请实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本申请的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
为了更好的理解本申请的技术方案,下面对本申请所涉及的背景技术进行进一步的详细介绍:
港湾站点进出站是自动驾驶车辆需要的关键能力之一,尤其是对自动驾驶公交车而言。
然而,由于港湾站点形状、尺寸的差异性,且进出港湾轨迹规划算法不能很好兼顾差异化的港湾,导致目前自动驾驶车辆在港湾站点进出过程中,成功率较低,当所使用的车辆为大型公交车时,进出站过程中驾驶合理性问题就更突出。
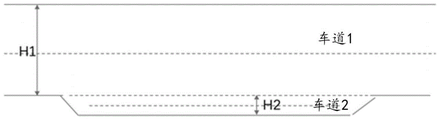
例如可以参照图1对港湾站点进行理解,图1为本申请实施例提供的标准的港湾示意图。
港湾站点中是为了不影响机动车道的通行能力服务水平,对道路进行展宽或对人行道进行压缩处理成一个港湾形式的停靠站,如图1所示,例如当前存在车道1,车道1的宽度是H1,其中车道1可以是正常的通行车道,以及在图1中还存在车道2,车道2的宽度是H2,其中车道2即为港湾站点的车道,自动驾驶的车辆可以在港湾站点内实现进出站。
为了便于理解,假设本申请中各个附图中的车道的行驶方向都是向右侧,在实际实现过程中,行驶方向可以根据实际的道路确定,本申请中是为了便于进行方案的介绍,指定了向右的行驶方向。
目前,自动驾驶车辆高度依赖高精地图标注的结构化道路,而不同地方的港湾站点形状、尺寸具有差异性,地图上对港湾式站点的标注方式极大的影响自动驾驶车辆自主进出站点的效果。
然而,在现有技术中,港湾站点的标注方式,严格依赖实际港湾的尺寸,最后的标注的地图,不利于自动驾驶车辆自主完成进出站。
例如实际的港湾尺寸不利于车辆的进出站,比如说尺寸比较小等,若仍然按照实际的港湾尺寸在地图中进行标注,那么车辆在根据标注的地图进行港湾站点的进出站是,会导致车辆进出站的成功率较低。
例如可结合图2进行理解,图2为本申请实施例提供的尺寸较小的港湾示意图。
如图2所示,当前仍然是存在车道1和车道2,其中,车道1的宽度是H1,是正常的通行车道,以及车道2的宽度是H2,是港湾站点的车道,但是可以看出的是车道2的宽度H2非常的小,若是在地图中按照该港湾站点的实际情况进行标注,则车辆很有可能会出现进出站失败。
以及,自动驾驶车辆进出站(尤其是港湾站点)对用户设定的目标停靠位置依赖性过大,出现的问题是,当所设目标停靠站点坐标过于靠近港湾入口,则车辆进站过程中,车头出港湾边界的可能性会增强,增大了碰撞风险,及时最后停靠成功,也很有可能车身不正。当所设定目标停靠站点坐标过于靠近港湾出口,这样有利于进站,但会导致出站轨迹曲率增大,影响出站效果。所以合理的目标停靠点的设定,对港湾进出站的效果有很大的影响。
目前进出站轨迹的生成,严格依赖用户设定的目标停靠点,而该点可能并不是很合理,导致最后生成的进出站轨迹不利于车辆进出站,容易出现进出站失败、体感差、车身停靠不正、存在碰撞风险。
以及,地图车道的不合理标注,不但影响车辆进出站,甚至也影响车辆正常的直行任务。
举例来说,港湾站点所占据的车道与其左侧车道的连接关系,可以是通过分叉道路的方式关联,也可以是通过以白虚线车道进行关联,其中,分叉道路不允许车辆变道,白虚线车道允许车辆变道。
如果港湾车道与左侧车道合并为一个车道,那么这个车道的形状就是两端车道宽度窄,在港湾处变车道宽度宽,那么这种方式就不能很好的支持路口港湾但不停车的直行任务,因为按照现有的规范方法,可能会因为港湾处车道变宽,导致车辆在经过港湾时,有向港湾内靠近的趋势,这明显不符合正常的驾驶行为。
所以,在港湾附近的地图车道标注,或者由规划算法动态生成虚拟车道,需要考虑能同时支持进出港湾的任务,以及车辆经过港湾但不进入,而是直行通过的任务。
综上所述,现有技术的实现方案中,会导致车辆进出站的成功率较低,针对现有技术中的问题,本申请提出了如下技术构思:基于道路的实际情况,在地图中规划出虚拟港湾,其中,虚拟港湾的尺寸可以利于车辆进出站,从而可以兼顾实际情况中的各种港湾站点,并有利于自动驾驶算法完成进出站的规划,从而有效提升车辆进出站的成功率。
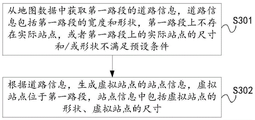
下面结合具体的实施例对本申请提供的站点信息确定方法进行介绍,图3为本申请实施例提供的站点信息确定方法的流程图。
如图3所示,该方法包括:
S301、从地图数据中获取第一路段的道路信息,道路信息包括第一路段的宽度和形状,第一路段上不存在实际站点,或者第一路段上的实际站点的尺寸和/或形状不满足预设条件。
在本实施例中,第一路段是指需要进行虚拟站点规划的路段,在一种可能的实现方式中,第一路段例如可以是工作人员从地图数据中选择出来的,或者,第一路段还可以是根据多种约束条件,从系统中选择出来的,本实施例对第一路段的具体是那一段路不做特别限制,其可以根据实际需求进行选择。
可以理解的是,本实施例中需要对第一路段进行虚拟站点的规划,在一种可能的情况中,可以是第一路段中不存在实际的站点,因此本实施例中才要规划出一个虚拟的站点,以便于车辆基于虚拟站点实现进出站。
在另一种可能的情况中,还可以是第一路段中的实际站点的尺寸和/或形状不满足预设条件,比如说实际站点的尺寸较小,和/或形状较差,均可以人为第一路段中的实际站点不满足预设条件,在本实施例中,预设条件用于指示站点有利于车辆进行进出站,具体的预设条件可以根据实际需求进行选择和设置。
则针对尺寸和/或形状不满足预设条件的实际站点,需要进行虚拟站点的规划,以便于车辆基于虚拟站点实现进出站。
在本实施例中,在地图数据中可以存储有各个路段的道路信息,因此可以从地图数据中获取第一路段的道路信息,其中,道路信息中例如可以包括第一路段的宽度和形状,或者,在其余可能的实现方式中,道路信息中还可以包括任意的与第一路段相关的数据,本实施例对道路信息的具体实现方式不做特别限制。
S302、根据道路信息,生成虚拟站点的站点信息,虚拟站点位于第一路段,站点信息中包括虚拟站点的形状、虚拟站点的尺寸。
本实施例中针对第一道路,需要进行虚拟站点的规划,其中,规划的虚拟站点就位于第一道路中,在一种可能的实现方式中,若在第一路段中不包括实际站点,则虚拟站点可以根据实际需求位于第一路段的任意位置;在另一种可能的实现方式中,若第一路段中包括实际站点,只是实际站点的尺寸和/或形状不利于车辆的进出站,则可以在原有的实际站点的基础上,进行虚拟站点的规划,其中,规划后的虚拟站点仍然位于第一路段中。
具体的,本实施例中可以根据道路信息,确定虚拟站点的站点信息,其中,道路信息中可以包括第一路段的宽度和形状,则可以基于第一道路的宽度和形状,确定虚拟站点的形状和尺寸。
在一种可能的实现方式中,例如可以在已有的实际站点的宽度和形状的基础上进行扩展,从而确定虚拟站点的形状和尺寸。
在另一种可能的实现方式中,还例如可以在没有实际站点的情况下,根据第一路段的宽度和形状,直接划分出来一部分形状和尺寸,作为虚拟站点的形状和尺寸,该形状和尺寸是在原有的第一路段的基础上确定的,比如说只要不超过第一路段的范围即可,或者说不超过第一路段的一半的范围即可,其可以根据实际需求进行选择和扩展。
在本实施例中,在规划的得到虚拟站点之后,例如可以在预设地图中标注站点信息,以使得自动驾驶车辆可以基于地图中标注的虚拟站点信息进行进出站的规划。
或者,还可以向车辆发送站点信息,以使车辆根据站点信息在虚拟站点停靠。
或者还可以在向车辆发送站点信息之后,同时将虚拟站点的站点信息也标注在预设地图中,本实施例对虚拟站点的站点信息的后续处理方式不做限定,只要车辆可以根据虚拟站点的站点信息实现进出站即可。
本申请实施例提供的站点信息确定方法,包括:从地图数据中获取第一路段的道路信息,道路信息包括第一路段的宽度和形状,第一路段上不存在实际站点,或者第一路段上的实际站点的尺寸和/或形状不满足预设条件。根据道路信息,生成虚拟站点的站点信息,虚拟站点位于第一路段,站点信息中包括虚拟站点的形状、虚拟站点的尺寸。通过在第一道路中不存在实际站点,或者实际站点不满足进出站要求时,根据第一路段的道路信息在道路中确定虚拟站点,并生成虚拟站点的站点信息,以使车辆按照该站点信息进行进出站,从而有效提升了车辆进出站的成功率。
在上述实施例的基础上,下面对本申请中第一路段上的实际站点的尺寸和/或形状不满足预设条件的情况,和第一路段不存在实际站点的情况,分别进行说明。
首先结合图4至图7对本申请实施例提供,第一路段上的实际站点的尺寸和/或形状不满足预设条件的情况进行进一步的详细介绍,图4为本申请实施例提供的站点信息确定方法的流程图二,图5为本申请实施例提供的第一路段的划分示意图,图6为本申请实施例提供的确定虚拟站点的实现示意图一,图7为本申请实施例提供的确定虚拟站点的实现示意图二。
如图4所示,该方法包括:
S401、从地图数据中获取第一路段的道路信息,道路信息包括第一路段的宽度和形状,第一路段上不存在实际站点,或者第一路段上的实际站点的尺寸和/或形状不满足预设条件。
其中,S401的实现方式与S301的实现方式类似,此处不再赘述。
S402、根据道路信息,确定第一路段的路段类型,路段类型为第一路段上存在实际站点。
其中,第一路段的路段类型可以为第一路段上存在实际站点,也就是本实施例中所说的第一路段中实际站点的尺寸和/或形状不满足预设条件,本实施例中可以根据道路信息确定第一路段的路段类型。
在一种可能的实现方式中,可以根据道路信息,判断第一路段各处的道路宽度是否相同,基于上述介绍可以确定的是,港湾站点是在路段中凹陷进去的一部分,因此若第一路段的道路宽度不相同,则确定第一路段的路段类型为存在实际站点。
在另一种可能的实现方式中,还可以根据第一路段的形状,判断第一路段中是否存在预设形状的边缘,同样基于上述介绍可以确定的是,港湾站点在道路中存在一个特定的形状,因此若确定第一路段中存在预设形状的边缘,则可以确定第一路段的路段类型为存在实际站点。
在实际实现过程中,除了上述介绍的实现方式,还例如可以针对各个路段设置有标识信息,其中标识信息用于指示该路段中是否存在港湾站点,则根据标识信息,就可以快速有效的确定第一路段的路段类型,本实施例对确定第一路段的路段类型的具体实现方式不做特别限制,其可以根据实际需求进行选择和扩展。
S403、在第一路段中确定第一子路段和第二子路段,实际站点位于第一子路段。
在确定第一路段的路段类型是第一路段中存在实际站点时,可以在第一路段中确定第一子路段和第二子路段,其中,第一子路段例如可为包括实际站点的路段,第二子路段例如可以为不包括实际站点的路段。
例如可以参照图5进行理解,假设图5中所示的路段为第一路段,在第一路段中包括实际站点,则可以根据实际站点在第一路段中的位置,将第一路段划分为第一子路段和第二子路段。
如图5所示,包括实际站点的部分路段即为第一子路段,实际站点之外的路段可以确定为第二子路段,第二子路段可以是不连续的。
S404、将第二子路段的宽度确定为虚拟站点的宽度。
本实施例中,实际路段的尺寸和/或形状是不满足预设条件的,才导致实际路段不利于车辆的进出站,本实施例中需要规划出利于车辆进出站的虚拟站点,因此可以在实际站点的尺寸的基础上进行扩展,得到虚拟站点。
同时可以理解的是,尽管需要对尺寸进行扩展,但是仍然需要考虑道路的实际情况,比如说扩展后的宽度不应该超过道路的最大宽度。
因此在一种可能的实现方式中,可以将第二子路段的宽度确定为虚拟站点的宽度,其中,第二子路段是不包括实际站点的路段,也就是说第二子路段是正常的通行路段,这部分路段的宽度是可以满足车辆的正常通行的,因此可以将第二子路段的宽度确定为虚拟站点的宽度,以实现对站点尺寸的扩展。
例如可以结合图6进行理解,假设实际站点的宽度为图6中的H2所示,可以看出实际站点的宽度较窄,因此不利于车辆的进出站,则可以在实际站点的基础上对宽度进行扩展,规划出虚拟站点的宽度为H2`,其中,H2`例如可以和H1相等,也就是说将第二子路段的宽度H1确定为虚拟站点的宽度H2`。
同时可以理解的是,将第二子路段的宽度确定为虚拟站点的宽度,可以保证虚拟站点的宽度是不超过第一路段的最大宽度的,从而保证车辆根据虚拟站点进行进出站时,不会影响正常的交通秩序。
在另一种可能的实现方式中,例如还可以确定虚拟站点的宽度小于第二子路段的宽度,至于具体设置为多少,可以根据实际需求进行选择,只要保证虚拟站点的设置可以利于车辆进出站即可。
S405、将实际站点的长度确定为虚拟站点的长度,虚拟站点的尺寸包括虚拟站点的宽度和长度。
在本实施例中,第一路段中是包括实际站点的,实际站点本身具有边缘,也就是说在实际的道路中是有实体存在的边缘线的,因此针对站点的长度无法进行有效扩展,所以在本实施例中,可以将实际站点的长度确定为虚拟站点的长度。
例如可以参照图6进行理解,如图6所示,虚拟站点的长度和实际站点的长度是相等的。
虚拟站点的尺寸可以包括虚拟站点的长度和宽度,因此在确定虚拟站点的长度和宽度之后,就可以确定虚拟站点的尺寸了。
S406、根据虚拟站点的宽度,在第一路段中确定虚拟站点的外边缘,虚拟站点的外边缘与虚拟站点的内边缘之间的距离为虚拟站点的宽度,虚拟站点的内边缘为实际站点在第一子路段上的边缘,虚拟站点的形状包括虚拟站点的内边缘和外边缘。
在本实施例中,虚拟站点的站点信息包括虚拟站点的尺寸,还包括虚拟站点的形状,因此本实施例中还需要进一步确定虚拟站点的形状,其中,虚拟站点的形状,例如可以用虚拟站点的内边缘和外边缘来表示。
其中,因为本实施例中的第一路段是存在实际站点的,因此在道路中就存在站点的实体的外边缘,这一部分无法更改,因此可以确定虚拟站点内边缘为实际站点在第一子路段上的边缘。
例如可以参照图6进行理解,如图6所示,实际站点在第一子路段上的边缘可以如601所示,基于实际站点在第一子路段上的边缘601,可以确定虚拟站点的内边缘603,从图6中可以看出,虚拟站点的内边缘603和实际站点在第一子路段上的边缘601是一致的。
以及,在虚拟站点的内边缘已经确定的基础上,可以根据虚拟站点的宽度,在第一路段中确定虚拟站点的外边缘,可以参照图6进行理解,虚拟站点的外边缘602与虚拟站点的内边缘603之间的距离为虚拟站点的宽度H2`。
在确定虚拟站点的外边缘和内边缘之后,就可以确定虚拟站点的形状了,基于虚拟站点的尺寸和形状,就可以确定虚拟站点的站点信息,之后车辆就可以根据虚拟站点的站点信息进行进出站的操作。
在其余可能的实现方式中,虚拟站点的站点信息还可以包括虚拟站点中的车道线信息,车辆可以根据车道线信息确定具体的路径规划方式。
例如,车道线可以为平行于第一路段的直线,例如为图6中的车道线604所示,可以理解的是,该车道线可以将港湾车道标记为独立车道,基于该车道线,车辆可以在虚拟站点内进行变道,那么在车辆进行进出站时,可以从内侧车道进入,也就可以从外侧车道进入,因为在站点内以及站点前后是允许变道的。
更为详细的,车道线信息可以指示港湾站点所在的车道与相邻车道的关系,图6中所示的车道线,例如可以表示此时港湾站点所占据的车道与其左侧车道的连接关系,是通过虚线车道边界的方式关联,基于该车道线,可以关联直行车道和港湾所在车道,在规划策略上,规划算法会通过变道的方式,从直行车道变道到右侧车道,然后驶入港湾。
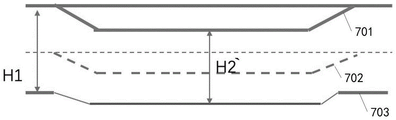
或者,车道线的形状还可以与虚拟车道的外边缘平行,例如可以结合图7进行理解,如图7所示,图7中所示的虚拟车道的宽度为H2`,内边缘为703,外边缘为701,这些实现方式均与上述图6中的类似,此处不再赘述。
不同之处在于,图7中的车道线702与虚拟车道的外边缘是平行的,该车道线可以将港湾车道标记为分叉车道,基于该车道线,车辆不能在虚拟站点内进行变道,例如内侧车道是直行车道,外侧车道是左转车道,这两个车道之间不能变道行驶,那么车辆在进出站时,就只能从内侧车道进入。
更为详细的,图7中所示的车道线,例如可以表示此时港湾站点所占据的车道与其左侧车道的连接关系,是通过分叉道路的方式关联,基于该车道线,可以分叉出直行车道和进港湾车道,在规划策略上,通常会在道路分叉点,根据自动驾驶车辆目标终点,选择是直行还是进港湾,并在分叉点处,开始驶入港湾。
基于上述介绍可以确定的是,车道线可以影响车辆的进出站路线,因此可以根据实际需求进行虚拟站点的车道线的选择。
本申请实施例提供的站点信息确定方法,包括:从地图数据中获取第一路段的道路信息,道路信息包括第一路段的宽度和形状,第一路段上不存在实际站点,或者第一路段上的实际站点的尺寸和/或形状不满足预设条件。根据道路信息,确定第一路段的路段类型,路段类型为第一路段上存在实际站点。在第一路段中确定第一子路段和第二子路段,实际站点位于第一子路段。将第二子路段的宽度确定为虚拟站点的宽度。将实际站点的长度确定为虚拟站点的长度,虚拟站点的尺寸包括虚拟站点的宽度和长度。根据虚拟站点的宽度,在第一路段中确定虚拟站点的外边缘,虚拟站点的外边缘与虚拟站点的内边缘之间的距离为虚拟站点的宽度,虚拟站点的内边缘为实际站点在第一子路段上的边缘,虚拟站点的形状包括虚拟站点的内边缘和外边缘。通过在第一路段中包括实际站点,但是实际站点不利于车辆的进出站时,根据不包括实际站点的正常通行道路的宽度,以及实际站点的内边缘,确定虚拟站点的宽度和内边缘,并且根据虚拟站点的宽度,确定虚拟站点的外边缘,从而可以快速有效的实现对虚拟站点的尺寸和形状的确定,并且本实施例中的虚拟站点是在实际站点的基础上进行扩展得到的,因此可以有效提升车辆进出站的成功率。
其次结合图8至图10对本申请实施例提供,第一路段上不存在实际站点的情况进行进一步的详细介绍,图8为本申请实施例提供的站点信息确定方法的流程图三,图9为本申请实施例提供的确定虚拟站点的实现示意图三,图10为本申请实施例提供的确定虚拟站点的实现示意图四。
如图8所示,该方法包括:
S801、从地图数据中获取第一路段的道路信息,道路信息包括第一路段的宽度和形状,第一路段上不存在实际站点,或者第一路段上的实际站点的尺寸和/或形状不满足预设条件。
其中,S801的实现方式与S301的实现方式类似,此处不再赘述。
S802、根据道路信息,确定第一路段的路段类型,路段类型为第一路段上不存在实际站点。
其中,第一路段的路段类型可以为第一路段上不存在实际站点,也就是本实施例中所说的第一路段中并不存在实际站点,本实施例中可以根据道路信息确定第一路段的路段类型。
在一种可能的实现方式中,可以根据道路信息,判断第一路段各处的道路宽度是否相同,基于上述介绍可以确定的是,港湾站点是在路段中凹陷进去的一部分,因此若第一路段的道路宽度相同,则确定第一路段的路段类型为不存在实际站点。
在另一种可能的实现方式中,还可以根据第一路段的形状,判断第一路段中是否存在预设形状的边缘,同样基于上述介绍可以确定的是,港湾站点在道路中存在一个特定的形状,因此若确定第一路段中不存在预设形状的边缘,则可以确定第一路段的路段类型为不存在实际站点。
在实际实现过程中,除了上述介绍的实现方式,还例如可以针对各个路段设置有标识信息,其中标识信息用于指示该路段中是否存在港湾站点,则根据标识信息,就可以快速有效的确定第一路段的路段类型,本实施例对确定第一路段的路段类型的具体实现方式不做特别限制,其可以根据实际需求进行选择和扩展。
S803、根据第一路段的宽度,确定虚拟站点的宽度,虚拟站点的宽度小于第一路段的宽度。
在本实施例中,第一路段中并不存在实际站点,但是本实施例中为了利于车辆的停靠,可以在不存在实际站点的第一路段中,规划出一个虚拟站点,以便于车辆进行进出站操作,从而便于车辆进行停靠和起步。
在一种可能的实现方式中,可以根据第一路段的宽度,确定虚拟站点的宽度,其中,虚拟站点的宽度小于第一路段的宽度。
例如可以结合图9进行理解,假设第一路段为图9所示的路段,其中第一路段的宽度为图9中所示的H1,可以看出在第一路段中原本是不存在港湾站点的,本实施例中可以在不存在港湾站点的第一路段中,规划出一个虚拟站点。
其中,虚拟站点的宽度可以为如图9中所示的H2,其中,虚拟站点的宽度H2小于第一路段的宽度H1。可以理解的是,设置虚拟站点的宽度小于第一路段的宽度,可以保证设置的虚拟站点是不超过第一路段的范围的,至于具体设置为多少,可以根据实际需求进行选择,只要保证虚拟站点的设置可以利于车辆进出站即可。
S804、将虚拟站点的长度设置为预设长度,虚拟站点的尺寸包括虚拟站点的宽度和长度。
以及在本实施例中,因为是在第一路段中直接规划出虚拟站点,因此可以将虚拟站点的长度设置为预设长度,预设长度的具体实现可以根据实际需求进行选择。
更为具体的,关于长度,如果港湾是实际的具有明确实体边界,例如说马路牙,那么就可以按照实际的实体边界长度来确定预设长度,进而得到虚拟站点的长度。其中,例如说基于马路牙的长度设置预设长度为40米左右,可以理解的是,该预设长度不应该超过实际的实体边界长度,在实际实现过程中,预设长度可以选择任意需要的数值。
如果港湾没有实际的明确实体边界,那么可以由地图标注的港湾长度,或者由规划算法动态计算的目标泊入港湾长度,确定预设长度,进而得到虚拟站点的长度。例如可以根据车辆尺寸、最小转弯半径、进出港湾的速度、以及停靠精度要求来确定,比如当需要较高的横向停靠精度以及方位精度时,就需要有港湾具有足够的长度。
此处进行举例说明,比如说为了满足横向距离为20±5cm;纵向距离为±50cm,方位角±5的停车精度,结合实际的车辆规划-控制误差,以及实际测试数据,可以评估满足精度要求的最小纵向长度。
参见图9可以确定的是,在图9所示的虚拟港湾中,去掉了港湾入口的约束,仅仅保留了港湾出口的约束,这样可以有利于车辆基于虚拟站点进行进出站操作。
同时值得说明的是,这种去掉港湾入口约束,是拉长港湾长度的一种方式,近似等效于港湾长度设定很大值,这种处理方式有两个明显的有利点:
(1)有利于车辆进出港湾,尤其对大型车辆,避免了由于车体尺寸过大,或者有限与港湾入口边界约束以及车辆转弯半径的限制,导致车辆进入港湾成功率低或者存在安全风险。
(2)有利于提升站点停靠精度,对车身边界到道路边界距离以及车身方位有明确要求的泊车任务,为了在最终停靠点,达到预设定的精度要求,就需要车辆有充足的误差修正时间,也以为着在港湾内,从车辆接近横向以及方位误差开始,要有足够长的距离逼近最终精度。
基于上述介绍,在确定虚拟站点的长度和宽度之后,就可以得到虚拟站点的尺寸了。
S805、根据虚拟站点的宽度,在第一路段中确定虚拟站点的外边缘,虚拟站点的外边缘与虚拟站点的内边缘之间的距离为虚拟站点的宽度,虚拟站点的内边缘为第一路段的边缘,虚拟站点的形状包括虚拟站点的内边缘和外边缘。
本实施例中,虚拟站点的站点信息包括虚拟站点的尺寸,还包括虚拟站点的形状,因此本实施例中还需要进一步确定虚拟站点的形状,其中,虚拟站点的形状,例如可以用虚拟站点的内边缘和外边缘来表示。
其中,S805中确定虚拟站点的形状的实现方式与S406的实现方式类似,不同之处在于,本实施例中的第一路段中不存在实际站点,因此在确定虚拟站点的内边缘时,是根据第一路段的边缘确定的。
类似的,因为在道路中就存在实体的边缘,这一部分无法更改,因此可以确定虚拟站点内边缘为第一路段的边缘。
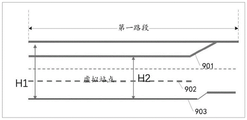
例如可以参照图9进行理解,如图9所示,903同时为虚拟站点的内边缘和第一路段的边缘,因此从图9中可以看出,虚拟站点的内边缘和第一路段的边缘是一致的。
以及,虚拟站点的外边缘的确定方式类似,在确定虚拟站点的外边缘和内边缘之后,就可以确定虚拟站点的形状了,基于虚拟站点的尺寸和形状,就可以确定虚拟站点的站点信息,之后车辆就可以根据虚拟站点的站点信息进行进出站的操作。
在其余可能的实现方式中,虚拟站点的站点信息还可以包括虚拟站点中的车道线信息,车辆可以根据车道线信息确定具体的路径规划方式。
例如,车道线可以为平行于第一路段的直线,例如为图9中的车道线902所示,可以理解的是,该车道线可以将港湾车道标记为独立车道,其实现方式与上述实施例介绍的类似,此处不再赘述。
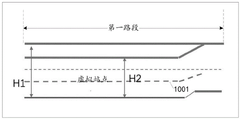
或者,车道线的形状还可以与虚拟车道的外边缘平行,例如可以结合图10进行理解,如图10所示,图10中所示的虚拟车道的宽度、内边缘、外边缘,均与上述图9中的类似,此处不再赘述。
不同之处在于,图10中的车道线1001与虚拟车道的外边缘是平行的,该车道线可以将港湾车道标记为分叉车道,其实现方式与上述实施例介绍的也类似,此处不再赘述。
基于上述介绍可以确定的是,车道线可以影响车辆的进出站路线,因此可以根据实际需求进行虚拟站点的车道线的选择。
本申请实施例提供的站点信息确定方法,包括:从地图数据中获取第一路段的道路信息,道路信息包括第一路段的宽度和形状,第一路段上不存在实际站点,或者第一路段上的实际站点的尺寸和/或形状不满足预设条件。根据道路信息,确定第一路段的路段类型,路段类型为第一路段上不存在实际站点。根据第一路段的宽度,确定虚拟站点的宽度,虚拟站点的宽度小于第一路段的宽度。将虚拟站点的长度设置为预设长度,虚拟站点的尺寸包括虚拟站点的宽度和长度。根据虚拟站点的宽度,在第一路段中确定虚拟站点的外边缘,虚拟站点的外边缘与虚拟站点的内边缘之间的距离为虚拟站点的宽度,虚拟站点的内边缘为第一路段的边缘,虚拟站点的形状包括虚拟站点的内边缘和外边缘。通过在第一路段中不包括实际站点时,根据第一路段的宽度,以及第一路段的内边缘,确定虚拟站点的宽度和内边缘,并且根据虚拟站点的宽度,确定虚拟站点的外边缘,从而可以快速有效的实现对虚拟站点的尺寸和形状的确定,并且本实施例中可以在第一路段中不包括实际站点时,确定出来一个虚拟站点,因此可以有效提升车辆进出站的成功率,同时便于车辆进行停靠。
在上述实施例的基础上,本申请实施例提供的方法中,还可以:
确定虚拟站点的进站点和虚拟站点的出站点,以及确定车辆在虚拟站点的停靠位置,之后根据进站点、出站点和停靠位置,确定车辆驶入以及驶出虚拟站点的行驶轨迹。
例如可以参照图11进行理解,图11为本申请实施例提供的车辆进出站的示意图。
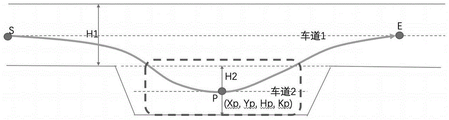
如图11所示,假设图11中示出了虚拟站点,虚拟站点的宽度为H2,对应图11中的车道2,不包括虚拟站点的第一路段的宽度可以为H1,对应图11中的车道1。
例如可以确定虚拟站点的进站点S以及虚拟站点的出站点E,并且可以确定车辆在虚拟站点的停靠点P,假设停靠点P的坐标为(Xp,Yp),以及停靠点的曲率例如可以表示为Kp,行驶方位角例如可以表示为Hp,其中行驶方位角也可以称作航向角(Heading Angle)。
本实施例中可以基于进站点S和停靠点P,确定车辆驶入虚拟站点的行驶轨迹,以及基于出站点E和停靠点P,确定车辆驶出虚拟站点的行驶轨迹。
其中,车辆可以在港湾站点内寻找到最佳的停靠目标点,该点不仅有利于车辆安全安心的进入港湾,同时有利于车辆安心安全的驶出港湾,同时,基于给定的进站初始点S,出站目标点E,以及确定的港湾停靠点P,生成满足车辆动力学约束的进入港湾以及驶出港湾的轨迹。
以及本实施例提供的站点信息确定方法,可以兼顾各种港湾站点,从而有利于自动驾驶算法完成港湾站点的进出,有效提升了车辆进出站的成功率。
本申请提供一种站点信息确定方法及装置,应用于智能交通中的自动泊车领域,以达到提升车辆进出站的成功率的目的。
图12为本申请实施例的站点信息确定装置的结构示意图。如图12所示,本实施例的站点信息确定装置1200可以包括:获取模块1201、生成模块1202、处理模块1203、确定模块1204。
获取模块1201,用于从地图数据中获取第一路段的道路信息,所述道路信息包括所述第一路段的宽度和形状,所述第一路段上不存在实际站点,或者所述第一路段上的实际站点的尺寸和/或形状不满足预设条件;
生成模块1202,用于根据所述道路信息,生成虚拟站点的站点信息,所述虚拟站点位于所述第一路段,所述站点信息中包括所述虚拟站点的形状、所述虚拟站点的尺寸。
一种可能的实现方式中,所述生成模块1202,包括:
确定单元,用于根据所述道路信息,确定所述第一路段的路段类型,所述路段类型为所述第一路段上存在实际站点,或者所述第一路段上不存在实际站点;
所述确定单元,还用于根据所述道路信息和所述路段类型,确定所述站点信息。
一种可能的实现方式中,所述确定单元,具体用于:
若所述第一路段的道路宽度不相同,则确定所述第一路段的路段类型为存在实际站点;或者,
若所述第一路段的道路宽度相同,则确定所述第一路段的路段类型为不存在实际站点。
一种可能的实现方式中,所述确定单元,具体用于:
根据所述第一路段的形状,判断所述第一路段中是否存在预设形状的边缘;
若是,则确定所述第一路段的路段类型为存在实际站点;
若否,则确定所述第一路段的路段类型为不存在实际站点。
一种可能的实现方式中,若所述路段类型为存在实际站点;所述确定单元,具体用于:
在所述第一路段中确定第一子路段和第二子路段,所述实际站点位于所述第一子路段;
根据所述第二子路段的宽度和所述第一路段的形状,确定所述站点信息。
一种可能的实现方式中,所述确定单元,具体用于:
将所述第二子路段的宽度确定为所述虚拟站点的宽度;
将所述实际站点的长度确定为所述虚拟站点的长度,所述虚拟站点的尺寸包括所述虚拟站点的宽度和长度;
根据所述虚拟站点的宽度,在所述第一路段中确定所述虚拟站点的外边缘,所述虚拟站点的外边缘与所述虚拟站点的内边缘之间的距离为所述虚拟站点的宽度,所述虚拟站点的内边缘为所述实际站点在所述第一子路段上的边缘,所述虚拟站点的形状包括所述虚拟站点的内边缘和外边缘。
一种可能的实现方式中,若所述路段类型为不存在实际站点;所述确定单元,具体用于:
根据所述第一路段的宽度,确定所述虚拟站点的宽度,所述虚拟站点的宽度小于所述第一路段的宽度;
将所述虚拟站点的长度设置为预设长度,所述虚拟站点的尺寸包括所述虚拟站点的宽度和长度;
根据所述虚拟站点的宽度,在所述第一路段中确定所述虚拟站点的外边缘,所述虚拟站点的外边缘与所述虚拟站点的内边缘之间的距离为所述虚拟站点的宽度,所述虚拟站点的内边缘为所述第一路段的边缘,所述虚拟站点的形状包括所述虚拟站点的内边缘和外边缘。
一种可能的实现方式中,所述站点信息还包括所述虚拟站点的车道线;
所述车道线为平行于所述第一路段的直线;或者,
所述车道线的形状与所述虚拟车道的外边缘平行;
一种可能的实现方式中,还包括:处理模块1203;
所述处理模块1203,用于在所述根据所述道路信息,生成虚拟站点的站点信息之后,在预设地图中标注所述站点信息;或者,
向车辆发送所述站点信息,以使所述车辆根据所述站点信息在所述虚拟站点停靠。
一种可能的实现方式中,还包括:确定模块1204;
所述确定模块1204,用于确定所述虚拟站点的进站点和所述虚拟站点的出站点;
确定车辆在所述虚拟站点的停靠位置;
根据所述进站点、所述出站点和所述停靠位置,确定所述车辆驶入以及驶出所述虚拟站点的行驶轨迹。
根据本申请的实施例,本申请还提供了一种电子设备和一种可读存储介质。
根据本申请的实施例,本申请还提供了一种计算机程序产品,程序产品包括:计算机程序,计算机程序存储在可读存储介质中,电子设备的至少一个处理器可以从可读存储介质读取计算机程序,至少一个处理器执行计算机程序使得电子设备执行上述任一实施例提供的方案。
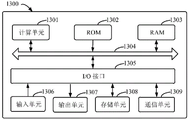
图13示出了可以用来实施本申请的实施例的示例电子设备1300的示意性框图。电子设备旨在表示各种形式的数字计算机,诸如,膝上型计算机、台式计算机、工作台、个人数字助理、服务器、刀片式服务器、大型计算机、和其它适合的计算机。电子设备还可以表示各种形式的移动装置,诸如,个人数字处理、蜂窝电话、智能电话、可穿戴设备和其它类似的计算装置。本文所示的部件、它们的连接和关系、以及它们的功能仅仅作为示例,并且不意在限制本文中描述的和/或者要求的本公开的实现。
如图13所示,电子设备1300包括计算单元1301,其可以根据存储在只读存储器(ROM)1302中的计算机程序或者从存储单元1308加载到随机访问存储器(RAM)1303中的计算机程序,来执行各种适当的动作和处理。在RAM 1303中,还可存储设备1300操作所需的各种程序和数据。计算单元1301、ROM 1302以及RAM 1303通过总线1304彼此相连。输入/输出(I/O)接口1305也连接至总线1304。
设备1300中的多个部件连接至I/O接口1305,包括:输入单元1306,例如键盘、鼠标等;输出单元1307,例如各种类型的显示器、扬声器等;存储单元1308,例如磁盘、光盘等;以及通信单元1309,例如网卡、调制解调器、无线通信收发机等。通信单元1309允许设备1300通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。
计算单元1301可以是各种具有处理和计算能力的通用和/或专用处理组件。计算单元1301的一些示例包括但不限于中央处理单元(CPU)、图形处理单元(GPU)、各种专用的人工智能(AI)计算芯片、各种运行机器学习模型算法的计算单元、数字信号处理器(DSP)、以及任何适当的处理器、控制器、微控制器等。计算单元1301执行上文所描述的各个方法和处理,例如站点信息确定方法。例如,在一些实施例中,站点信息确定方法可被实现为计算机软件程序,其被有形地包含于机器可读介质,例如存储单元1308。在一些实施例中,计算机程序的部分或者全部可以经由ROM 1302和/或通信单元1309而被载入和/或安装到设备1300上。当计算机程序加载到RAM 1303并由计算单元1301执行时,可以执行上文描述的站点信息确定方法的一个或多个步骤。备选地,在其他实施例中,计算单元1301可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行站点信息确定方法。
本文中以上描述的系统和技术的各种实施方式可以在数字电子电路系统、集成电路系统、场可编程门阵列(FPGA)、专用集成电路(ASIC)、专用标准产品(ASSP)、芯片上系统的系统(SOC)、负载可编程逻辑设备(CPLD)、计算机硬件、固件、软件、和/或它们的组合中实现。这些各种实施方式可以包括:实施在一个或者多个计算机程序中,该一个或者多个计算机程序可在包括至少一个可编程处理器的可编程系统上执行和/或解释,该可编程处理器可以是专用或者通用可编程处理器,可以从存储系统、至少一个输入装置、和至少一个输出装置接收数据和指令,并且将数据和指令传输至该存储系统、该至少一个输入装置、和该至少一个输出装置。
用于实施本公开的方法的程序代码可以采用一个或多个编程语言的任何组合来编写。这些程序代码可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器或控制器,使得程序代码当由处理器或控制器执行时使流程图和/或框图中所规定的功能/操作被实施。程序代码可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。
在本公开的上下文中,机器可读介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的程序。机器可读介质可以是机器可读信号介质或机器可读储存介质。机器可读介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦除可编程只读存储器(EPROM或快闪存储器)、光纤、便捷式紧凑盘只读存储器(CD-ROM)、光学储存设备、磁储存设备、或上述内容的任何合适组合。
为了提供与用户的交互,可以在计算机上实施此处描述的系统和技术,该计算机具有:用于向用户显示信息的显示装置(例如,CRT(阴极射线管)或者LCD(液晶显示器)监视器);以及键盘和指向装置(例如,鼠标或者轨迹球),用户可以通过该键盘和该指向装置来将输入提供给计算机。其它种类的装置还可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的传感反馈(例如,视觉反馈、听觉反馈、或者触觉反馈);并且可以用任何形式(包括声输入、语音输入或者、触觉输入)来接收来自用户的输入。
可以将此处描述的系统和技术实施在包括后台部件的计算系统(例如,作为数据服务器)、或者包括中间件部件的计算系统(例如,应用服务器)、或者包括前端部件的计算系统(例如,具有图形用户界面或者网络浏览器的用户计算机,用户可以通过该图形用户界面或者该网络浏览器来与此处描述的系统和技术的实施方式交互)、或者包括这种后台部件、中间件部件、或者前端部件的任何组合的计算系统中。可以通过任何形式或者介质的数字数据通信(例如,通信网络)来将系统的部件相互连接。通信网络的示例包括:局域网(LAN)、广域网(WAN)和互联网。
计算机系统可以包括客户端和服务器。客户端和服务器一般远离彼此并且通常通过通信网络进行交互。通过在相应的计算机上运行并且彼此具有客户端-服务器关系的计算机程序来产生客户端和服务器的关系。服务器可以是云服务器,又称为云计算服务器或云主机,是云计算服务体系中的一项主机产品,以解决了传统物理主机与VPS服务("Virtual Private Server",或简称"VPS")中,存在的管理难度大,业务扩展性弱的缺陷。服务器也可以为分布式系统的服务器,或者是结合了区块链的服务器。
应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发申请中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本申请公开的技术方案所期望的结果,本文在此不进行限制。
上述具体实施方式,并不构成对本申请保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本申请的精神和原则之内所作的修改、等同替换和改进等,均应包含在本申请保护范围之内。
Claims (21)
1.一种站点信息确定方法,包括:
从地图数据中获取第一路段的道路信息,所述道路信息包括所述第一路段的宽度和形状;
根据所述道路信息,确定所述第一路段的路段类型,所述路段类型为所述第一路段上存在实际站点或者不存在实际站点,在所述第一路段存在实际站点时,所述第一路段上的实际站点的尺寸和/或形状不满足预设条件;
根据所述道路信息和所述路段类型,生成虚拟站点的站点信息,所述虚拟站点位于所述第一路段,所述站点信息中包括所述虚拟站点的形状、所述虚拟站点的尺寸。
2.根据权利要求1所述的方法,其中,所述根据所述道路信息,确定所述第一路段的路段类型,包括:
若所述第一路段的道路宽度不相同,则确定所述第一路段的路段类型为存在实际站点;或者,
若所述第一路段的道路宽度相同,则确定所述第一路段的路段类型为不存在实际站点。
3.根据权利要求1所述的方法,其中,所述根据所述道路信息,确定所述第一路段的路段类型,包括:
根据所述第一路段的形状,判断所述第一路段中是否存在预设形状的边缘;
若是,则确定所述第一路段的路段类型为存在实际站点;
若否,则确定所述第一路段的路段类型为不存在实际站点。
4.根据权利要求1-3任一项所述的方法,其中,若所述路段类型为存在实际站点;所述根据所述道路信息和所述路段类型,确定所述站点信息,包括:
在所述第一路段中确定第一子路段和第二子路段,所述实际站点位于所述第一子路段;
根据所述第二子路段的宽度和所述第一路段的形状,确定所述站点信息。
5.根据权利要求4所述的方法,其中,所述根据所述第二子路段的宽度和所述第一路段的形状,确定所述站点信息,包括:
将所述第二子路段的宽度确定为所述虚拟站点的宽度;
将所述实际站点的长度确定为所述虚拟站点的长度,所述虚拟站点的尺寸包括所述虚拟站点的宽度和长度;
根据所述虚拟站点的宽度,在所述第一路段中确定所述虚拟站点的外边缘,所述虚拟站点的外边缘与所述虚拟站点的内边缘之间的距离为所述虚拟站点的宽度,所述虚拟站点的内边缘为所述实际站点在所述第一子路段上的边缘,所述虚拟站点的形状包括所述虚拟站点的内边缘和外边缘。
6.根据权利要求1-3任一项所述的方法,其中,若所述路段类型为不存在实际站点;所述根据所述道路信息和所述路段类型,确定所述站点信息,包括:
根据所述第一路段的宽度,确定所述虚拟站点的宽度,所述虚拟站点的宽度小于所述第一路段的宽度;
将所述虚拟站点的长度设置为预设长度,所述虚拟站点的尺寸包括所述虚拟站点的宽度和长度;
根据所述虚拟站点的宽度,在所述第一路段中确定所述虚拟站点的外边缘,所述虚拟站点的外边缘与所述虚拟站点的内边缘之间的距离为所述虚拟站点的宽度,所述虚拟站点的内边缘为所述第一路段的边缘,所述虚拟站点的形状包括所述虚拟站点的内边缘和外边缘。
7.根据权利要求1-3、5任一项所述的方法,其中,所述站点信息还包括所述虚拟站点的车道线;
所述车道线为平行于所述第一路段的直线;或者,
所述车道线的形状与虚拟车道的外边缘平行。
8.根据权利要求1-3、5任一项所述的方法,其中,所述根据所述道路信息,生成虚拟站点的站点信息之后,还包括:
在预设地图中标注所述站点信息;或者,
向车辆发送所述站点信息,以使所述车辆根据所述站点信息在所述虚拟站点停靠。
9.根据权利要求1-3、5任一项所述的方法,还包括:
确定所述虚拟站点的进站点和所述虚拟站点的出站点;
确定车辆在所述虚拟站点的停靠位置;
根据所述进站点、所述出站点和所述停靠位置,确定所述车辆驶入以及驶出所述虚拟站点的行驶轨迹。
10.一种站点信息确定装置,包括:
获取模块,用于从地图数据中获取第一路段的道路信息,所述道路信息包括所述第一路段的宽度和形状,所述第一路段上不存在实际站点,或者所述第一路段上的实际站点的尺寸和/或形状不满足预设条件;
确定单元,用于根据所述道路信息,确定所述第一路段的路段类型,所述路段类型为所述第一路段上存在实际站点或者不存在实际站点,在所述第一路段存在实际站点时,所述第一路段上的实际站点的尺寸和/或形状不满足预设条件;
根据所述道路信息和所述路段类型,生成虚拟站点的站点信息,所述虚拟站点位于所述第一路段,所述站点信息中包括所述虚拟站点的形状、所述虚拟站点的尺寸。
11.根据权利要求10所述的装置,其中,所述确定单元,具体用于:
若所述第一路段的道路宽度不相同,则确定所述第一路段的路段类型为存在实际站点;或者,
若所述第一路段的道路宽度相同,则确定所述第一路段的路段类型为不存在实际站点。
12.根据权利要求11所述的装置,其中,所述确定单元,具体用于:
根据所述第一路段的形状,判断所述第一路段中是否存在预设形状的边缘;
若是,则确定所述第一路段的路段类型为存在实际站点;
若否,则确定所述第一路段的路段类型为不存在实际站点。
13.根据权利要求10-12任一项所述的装置,其中,若所述路段类型为存在实际站点;所述确定单元,具体用于:
在所述第一路段中确定第一子路段和第二子路段,所述实际站点位于所述第一子路段;
根据所述第二子路段的宽度和所述第一路段的形状,确定所述站点信息。
14.根据权利要求13所述的装置,其中,所述确定单元,具体用于:
将所述第二子路段的宽度确定为所述虚拟站点的宽度;
将所述实际站点的长度确定为所述虚拟站点的长度,所述虚拟站点的尺寸包括所述虚拟站点的宽度和长度;
根据所述虚拟站点的宽度,在所述第一路段中确定所述虚拟站点的外边缘,所述虚拟站点的外边缘与所述虚拟站点的内边缘之间的距离为所述虚拟站点的宽度,所述虚拟站点的内边缘为所述实际站点在所述第一子路段上的边缘,所述虚拟站点的形状包括所述虚拟站点的内边缘和外边缘。
15.根据权利要求10-12任一项所述的装置,其中,若所述路段类型为不存在实际站点;所述确定单元,具体用于:
根据所述第一路段的宽度,确定所述虚拟站点的宽度,所述虚拟站点的宽度小于所述第一路段的宽度;
将所述虚拟站点的长度设置为预设长度,所述虚拟站点的尺寸包括所述虚拟站点的宽度和长度;
根据所述虚拟站点的宽度,在所述第一路段中确定所述虚拟站点的外边缘,所述虚拟站点的外边缘与所述虚拟站点的内边缘之间的距离为所述虚拟站点的宽度,所述虚拟站点的内边缘为所述第一路段的边缘,所述虚拟站点的形状包括所述虚拟站点的内边缘和外边缘。
16.根据权利要求10-12、14任一项所述的装置,其中,所述站点信息还包括所述虚拟站点的车道线;
所述车道线为平行于所述第一路段的直线;或者,
所述车道线的形状与虚拟车道的外边缘平行。
17.根据权利要求10-12、14任一项所述的装置,还包括:处理模块;
所述处理模块,用于在所述根据所述道路信息,生成虚拟站点的站点信息之后,在预设地图中标注所述站点信息;或者,
向车辆发送所述站点信息,以使所述车辆根据所述站点信息在所述虚拟站点停靠。
18.根据权利要求10-12、14任一项所述的装置,还包括:确定模块;
所述确定模块,用于确定所述虚拟站点的进站点和所述虚拟站点的出站点;
确定车辆在所述虚拟站点的停靠位置;
根据所述进站点、所述出站点和所述停靠位置,确定所述车辆驶入以及驶出所述虚拟站点的行驶轨迹。
19.一种电子设备,包括:
至少一个处理器;以及
与所述至少一个处理器通信连接的存储器;其中,
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-9中任一项所述的方法。
20.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行权利要求1-9中任一项所述的方法。
21.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-9中任一项所述的方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011603515.2A CN112767725B (zh) | 2020-12-29 | 2020-12-29 | 站点信息确定方法及装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011603515.2A CN112767725B (zh) | 2020-12-29 | 2020-12-29 | 站点信息确定方法及装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112767725A CN112767725A (zh) | 2021-05-07 |
| CN112767725B true CN112767725B (zh) | 2022-05-10 |
Family
ID=75697309
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011603515.2A Active CN112767725B (zh) | 2020-12-29 | 2020-12-29 | 站点信息确定方法及装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112767725B (zh) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040068361A1 (en) * | 2002-06-04 | 2004-04-08 | Bombardier Transportation (Technology) Germany Gmbh | Automated manipulation system and method in a transit system |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015163881A (ja) * | 2015-04-01 | 2015-09-10 | 株式会社ナビタイムジャパン | 情報処理システム、情報処理プログラム、情報処理装置、および、情報処理方法 |
| CN107889214A (zh) * | 2017-11-08 | 2018-04-06 | 深圳市凡骑绿畅技术有限公司 | 一种蓝牙虚拟站点定位系统及方法 |
| CN108389423B (zh) * | 2018-03-14 | 2022-06-17 | 斑马网络技术有限公司 | 停车方法及其停车系统 |
| CN111489018A (zh) * | 2020-03-30 | 2020-08-04 | 德鑫智慧科技(上海)有限公司 | 动态自适应智慧站点群布置方法及系统 |
-
2020
- 2020-12-29 CN CN202011603515.2A patent/CN112767725B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040068361A1 (en) * | 2002-06-04 | 2004-04-08 | Bombardier Transportation (Technology) Germany Gmbh | Automated manipulation system and method in a transit system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112767725A (zh) | 2021-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113071493A (zh) | 车辆变道控制的方法、设备、存储介质和程序产品 | |
| CN106767914B (zh) | 用于测试基于高精度地图规划的路径的方法和装置 | |
| CN112622933B (zh) | 车辆停靠点的确定方法及装置 | |
| CN114475585B (zh) | 路口自动驾驶方法、装置、电子设备及自动驾驶车辆 | |
| CN113401141B (zh) | 路线处理方法及装置 | |
| CN113050621A (zh) | 轨迹规划方法、装置、电子设备和存储介质 | |
| CN113928340A (zh) | 应用于车辆中的避障方法、装置、电子设备和存储介质 | |
| CN114724108A (zh) | 车道线处理方法及装置 | |
| US20230202518A1 (en) | Method for planning route, electronic device and storage medium | |
| CN112550315A (zh) | 车辆轨迹规划方法、装置、电子设备及存储介质 | |
| CN112767725B (zh) | 站点信息确定方法及装置 | |
| CN114889587A (zh) | 一种代客泊车车速的确定方法、装置、设备及介质 | |
| CN113722342A (zh) | 高精地图要素变更检测方法、装置、设备及自动驾驶车辆 | |
| US10969231B2 (en) | Map data update system and non-transitory computer-readable storage medium | |
| CN114252086B (zh) | 提示信息的输出方法、装置、设备、介质和车辆 | |
| CN114216476A (zh) | 一种车道数据处理方法、装置、电子设备和存储介质 | |
| CN115497322A (zh) | 一种窄路会车方法、装置、设备及存储介质 | |
| CN114689061A (zh) | 自动驾驶设备的导航路线处理方法、装置及电子设备 | |
| CN115510923A (zh) | 信号灯自动关联道路的方法、装置、电子设备及介质 | |
| CN114179805A (zh) | 一种行驶方向确定方法、装置、设备以及存储介质 | |
| CN114394098B (zh) | 车辆停靠的方法、装置、电子设备和可读存储介质 | |
| CN116279696B (zh) | 虚拟轨道列车移动授权距离的确定方法、装置和设备 | |
| CN114279455B (zh) | 路径规划方法、装置、电子设备和可读存储介质 | |
| CN117391971A (zh) | 一种导航轨迹平滑方法、装置、电子设备和存储介质 | |
| CN114132344A (zh) | 一种自动驾驶车辆的决策方法、装置、设备及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |