CN110978007A - 一种自动搬砖机械手 - Google Patents
一种自动搬砖机械手 Download PDFInfo
- Publication number
- CN110978007A CN110978007A CN201911320601.XA CN201911320601A CN110978007A CN 110978007 A CN110978007 A CN 110978007A CN 201911320601 A CN201911320601 A CN 201911320601A CN 110978007 A CN110978007 A CN 110978007A
- Authority
- CN
- China
- Prior art keywords
- groove
- rotating
- shaft
- gear
- lifting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04G—SCAFFOLDING; FORMS; SHUTTERING; BUILDING IMPLEMENTS OR AIDS, OR THEIR USE; HANDLING BUILDING MATERIALS ON THE SITE; REPAIRING, BREAKING-UP OR OTHER WORK ON EXISTING BUILDINGS
- E04G21/00—Preparing, conveying, or working-up building materials or building elements in situ; Other devices or measures for constructional work
- E04G21/14—Conveying or assembling building elements
- E04G21/16—Tools or apparatus
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04G—SCAFFOLDING; FORMS; SHUTTERING; BUILDING IMPLEMENTS OR AIDS, OR THEIR USE; HANDLING BUILDING MATERIALS ON THE SITE; REPAIRING, BREAKING-UP OR OTHER WORK ON EXISTING BUILDINGS
- E04G21/00—Preparing, conveying, or working-up building materials or building elements in situ; Other devices or measures for constructional work
- E04G21/14—Conveying or assembling building elements
- E04G21/16—Tools or apparatus
- E04G21/162—Handles to carry construction blocks
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Manipulator (AREA)
Abstract
本发明公开的一种自动搬砖机械手,包括底座,所述底座内设有行进装置,所述行进装置用于带动所述底座行进,所述底座上端面通过转向电机转动设有转动柱,所述转动柱内设有高度调节装置,所述高度调节装置包括可升降的升降臂,所述升降臂左端面固设有安装板,所述安装板下端之间固设有放置板,本发明通过高度调节装置与行进装置可带动整体进行移动,通过夹持块对砖块进行夹紧,将砖块放置于放置板上时,摆臂与夹持块的同步转动,使得砖块以翻转的方式放置于放置板上或从放置板上取出,此过程中,砖块始终有底部砖块、地面或放置板作为支撑翻转,则保障砖块之间紧密夹持,且可夹持不同数量的砖块,此搬运的过程全自动化完成,安全性高且工作效率高。
Description
技术领域
本发明涉及机械手技术领域,具体为一种自动搬砖机械手。
背景技术
搬砖是指搬运砖块,目前的搬砖工作通常为人工搬运或通过简易搬运器具辅助搬运,辅助的搬运设备通常是通过搬运工手部的力量为动力源,将砖块夹持于器具之间,由于夹持的器具为开放式,多为两个对称的夹持板,则夹取超过一块数量的砖块时,中间部分的砖块仅受到相邻的砖块给的挤压力,则在搬运过程中,搬运工手部力量松弛时会导致中间部分砖块掉落,使用不便且砖块的掉落存在一定的安全隐患,其次,手部的力量有限,导致其单次搬运的砖块数量有限,搬运效率低,部分的搬运装置体积大,适用范围及区域小。本发明阐明的一种能解决上述问题的装置。
发明内容
技术问题:
现有的砖块搬运工作通常人力搬运,效率低,且存在一定的安全隐患。
为解决上述问题,本例设计了一种自动搬砖机械手,本例的一种自动搬砖机械手,包括底座,所述底座内设有行进装置,所述行进装置用于带动所述底座行进,所述底座上端面通过转向电机转动设有转动柱,所述转动柱内设有高度调节装置,所述高度调节装置包括可升降的升降臂,所述升降臂左端面固设有安装板,所述安装板下端之间固设有放置板,两个所述安装板与所述放置板之间设有驱动装置,前后的所述安装板相互靠近的一端面转动安装有旋转块,所述驱动装置为所述旋转块转动提供动力,所述旋转块内设有摆动装置,所述摆动装置包括可升降的摆臂,前后的所述摆臂相互靠近的一端面转动安装有夹持块,则所述旋转块摆动时带动所述摆臂摆动,使得所述夹持块摆动至待搬运的砖块两侧,后侧的所述夹持块可前后移动调节两个所述夹持块之间的距离,从而将砖块夹紧于所述夹持块之间,当所述旋转块带动所述摆臂向竖直状态摆动时,所述夹持块转动带动砖块转动一百八十度放置于所述放置板上,进而通过所述行进装置带动砖块移动。
可优选地,后侧的所述摆臂内固设有液压缸,所述液压缸前端动力安装有伸缩轴,后侧的所述夹持块与所述伸缩轴前端转动连接。
可优选地,前后的所述夹持块相互靠近的一端面固设有防滑垫用以夹持防滑。
其中,所述行进装置包括左右对称的开口朝下的履带槽,所述履带槽内转动设有前后对称的行进轮,前后的所述行进轮之间通过履带动力连接,前侧的所述行进轮与后侧的所述行进轮中心之间分别通过行进轴固连,前侧的所述行进轴右端动力连接于安装在右侧的所述履带槽右端壁上的行进电机上。
其中,所述高度调节装置包括开口朝左的升降槽,所述升降槽上端壁固设有升降电机,所述升降电机下端动力安装有下端与所述升降槽下端壁转动连接的滚珠丝杠,所述升降臂与所述滚珠丝杠螺纹连接。
其中,所述驱动装置包括前后对称的传动槽,所述传动槽内均转动设有与同侧的所述旋转块固连的转动轴,所述传动槽下侧转动设有驱动轴,所述驱动轴与所述转动轴之间通过传动皮带动力连接,前后的所述驱动轴相互靠近的一端之间动力安装有驱动电机,前侧的所述传动槽前端壁内设有啮合腔,前侧的所述转动轴前端延伸至所述啮合腔内且固设有外齿轮,所述外齿轮内啮合连接有内齿轮,所述内齿轮中心处固设有齿轮转轴,所述齿轮转轴与所述转动轴转动连接且向后延伸。
其中,所述摆动装置包括所述旋转块内设置的上下贯穿的伸缩槽,所述摆臂滑动设置于所述伸缩槽内,前后的所述伸缩槽靠近对称中心的一侧设有导滑槽,所述导滑槽内滑动设有与所述摆臂固连的导滑块,所述导滑块上下端与所述导滑槽之间固设有压力弹簧,前侧的所述摆臂内设有同步带槽,所述同步带槽内转动设有连接轴,所述连接轴下侧转动设有旋转轴,所述旋转轴与所述连接轴之间通过同步皮带动力连接,前侧的所述夹持块与所述旋转轴后端固连,所述同步带槽前侧设有凹槽,所述连接轴前端延伸至所述凹槽内且固设有第一锥齿轮,所述第一锥齿轮上侧啮合连接有第二锥齿轮,所述第二锥齿轮上侧固设有直齿轮,前侧的所述伸缩槽前端壁内设有转动腔,所述转动腔内通过安装轴转动设有与所述直齿轮啮合的转动齿柱,所述转动腔下侧设有连接腔,所述安装轴下端延伸至所述连接腔内且固设有第三锥齿轮,所述第三锥齿轮前侧啮合连接有与所述齿轮转轴后端固连的第四锥齿轮。
本发明的有益效果是:本发明通过高度调节装置与行进装置可带动整体进行移动,通过夹持块对砖块进行夹紧,将砖块放置于放置板上时,摆臂与夹持块的同步转动,使得砖块以翻转的方式放置于放置板上或从放置板上取出,此过程中,砖块始终有底部砖块、地面或放置板作为支撑翻转,则保障砖块之间紧密夹持,且可夹持不同数量的砖块,此搬运的过程全自动化完成,安全性高且工作效率高。
附图说明
为了易于说明,本发明由下述的具体实施例及附图作以详细描述。
图1为本发明的一种自动搬砖机械手的整体结构示意图;
图2为图1的“A”放大的结构示意图;
图3为图1的“B-B”方向的结构示意图;
图4为图3的“C”放大的结构示意图;
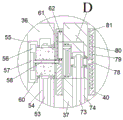
图5为图4的“D”放大结构示意图。
具体实施方式
下面结合图1-图5对本发明进行详细说明,为叙述方便,现对下文所说的方位规定如下:下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。
本发明涉及一种自动搬砖机械手,主要用于搬砖工作,下面将结合本发明附图对本发明做进一步说明:
本发明所述的一种自动搬砖机械手,包括底座20,所述底座20内设有行进装置90,所述行进装置90用于带动所述底座20行进,所述底座20上端面通过转向电机30转动设有转动柱31,所述转动柱31内设有高度调节装置89,所述高度调节装置89包括可升降的升降臂32,所述升降臂32左端面固设有安装板36,所述安装板36下端之间固设有放置板50,两个所述安装板36与所述放置板50之间设有驱动装置88,前后的所述安装板36相互靠近的一端面转动安装有旋转块40,所述驱动装置88为所述旋转块40转动提供动力,所述旋转块40内设有摆动装置87,所述摆动装置87包括可升降的摆臂37,前后的所述摆臂37相互靠近的一端面转动安装有夹持块38,则所述旋转块40摆动时带动所述摆臂37摆动,使得所述夹持块38摆动至待搬运的砖块两侧,后侧的所述夹持块38可前后移动调节两个所述夹持块38之间的距离,从而将砖块夹紧于所述夹持块38之间,当所述旋转块40带动所述摆臂37向竖直状态摆动时,所述夹持块38转动带动砖块转动一百八十度放置于所述放置板50上,进而通过所述行进装置90带动砖块移动。
有益地,后侧的所述摆臂37内固设有液压缸77,所述液压缸77前端动力安装有伸缩轴76,后侧的所述夹持块38与所述伸缩轴76前端转动连接。
有益地,前后的所述夹持块38相互靠近的一端面固设有防滑垫39用以夹持防滑。
根据实施例,以下对行进装置90进行详细说明,所述行进装置90包括左右对称的开口朝下的履带槽21,所述履带槽21内转动设有前后对称的行进轮24,前后的所述行进轮24之间通过履带25动力连接,前侧的所述行进轮24与后侧的所述行进轮24中心之间分别通过行进轴23固连,前侧的所述行进轴23右端动力连接于安装在右侧的所述履带槽21右端壁上的行进电机22上。
根据实施例,以下对高度调节装置89进行详细说明,所述高度调节装置89包括开口朝左的升降槽33,所述升降槽33上端壁固设有升降电机35,所述升降电机35下端动力安装有下端与所述升降槽33下端壁转动连接的滚珠丝杠34,所述升降臂32与所述滚珠丝杠34螺纹连接。
根据实施例,以下对驱动装置88进行详细说明,所述驱动装置88包括前后对称的传动槽54,所述传动槽54内均转动设有与同侧的所述旋转块40固连的转动轴60,所述传动槽54下侧转动设有驱动轴52,所述驱动轴52与所述转动轴60之间通过传动皮带53动力连接,前后的所述驱动轴52相互靠近的一端之间动力安装有驱动电机51,前侧的所述传动槽54前端壁内设有啮合腔55,前侧的所述转动轴60前端延伸至所述啮合腔55内且固设有外齿轮56,所述外齿轮56内啮合连接有内齿轮57,所述内齿轮57中心处固设有齿轮转轴58,所述齿轮转轴58与所述转动轴60转动连接且向后延伸。
根据实施例,以下对摆动装置87进行详细说明,所述摆动装置87包括所述旋转块40内设置的上下贯穿的伸缩槽81,所述摆臂37滑动设置于所述伸缩槽81内,前后的所述伸缩槽81靠近对称中心的一侧设有导滑槽79,所述导滑槽79内滑动设有与所述摆臂37固连的导滑块78,所述导滑块78上下端与所述导滑槽79之间固设有压力弹簧80,前侧的所述摆臂37内设有同步带槽74,所述同步带槽74内转动设有连接轴72,所述连接轴72下侧转动设有旋转轴75,所述旋转轴75与所述连接轴72之间通过同步皮带73动力连接,前侧的所述夹持块38与所述旋转轴75后端固连,所述同步带槽74前侧设有凹槽67,所述连接轴72前端延伸至所述凹槽67内且固设有第一锥齿轮71,所述第一锥齿轮71上侧啮合连接有第二锥齿轮70,所述第二锥齿轮70上侧固设有直齿轮69,前侧的所述伸缩槽81前端壁内设有转动腔61,所述转动腔61内通过安装轴63转动设有与所述直齿轮69啮合的转动齿柱62,所述转动腔61下侧设有连接腔65,所述安装轴63下端延伸至所述连接腔65内且固设有第三锥齿轮66,所述第三锥齿轮66前侧啮合连接有与所述齿轮转轴58后端固连的第四锥齿轮64。
以下结合图1至图5对本文中的一种自动搬砖机械手的使用步骤进行详细说明:
初始时,升降臂32下端面与升降槽33下端壁抵接,安装板36竖直设置,压力弹簧80处于自然状态。
搬运时,行进电机22启动,带动行进轮24转动,则履带25转动,带动底座20行进至待搬运的砖块处,启动转向电机30带动滚珠丝杠34转动,则升降臂32上升使得放置板50上端面与单次待搬运的砖块下端面平齐;
启动驱动电机51,带动驱动轴52转动,通过传动皮带53使得转动轴60顺时针摆动,则旋转块40带动摆臂37摆动,则夹持块38位于单次待搬运的砖块的前后两侧,则液压缸77工作,通过伸缩轴76推动后侧的夹持块38向前移动,使得前后的夹持块38将砖块夹紧;
其后,驱动电机51反转工作,则转动轴60反转带动摆臂37逆时针摆动复位,转动轴60反转时,通过外齿轮56带动内齿轮57转动,则齿轮转轴58带动第四锥齿轮64转动,从而转动齿柱62带动直齿轮69转动,使得第一锥齿轮71转动,通过同步皮带73带动夹持块38转动,则夹持块38带动砖块翻转一百八十度放置于至放置板50上,翻转过程中,摆臂37会升降,通过压力弹簧80进行调节复位;
启动行进电机22,通过履带25的转动带动放置板50移动至放置砖块的位置,转向电机30工作调节高度,其后,驱动电机51反转工作,使得摆臂37带动砖块向放置区域摆动,且夹持块38带动砖块翻转至放置区域完成搬运堆码。
本发明的有益效果是:本发明通过高度调节装置与行进装置可带动整体进行移动,通过夹持块对砖块进行夹紧,将砖块放置于放置板上时,摆臂与夹持块的同步转动,使得砖块以翻转的方式放置于放置板上或从放置板上取出,此过程中,砖块始终有底部砖块、地面或放置板作为支撑翻转,则保障砖块之间紧密夹持,且可夹持不同数量的砖块,此搬运的过程全自动化完成,安全性高且工作效率高。
通过以上方式,本领域的技术人员可以在本发明的范围内根据工作模式做出各种改变。
Claims (7)
1.一种自动搬砖机械手,包括底座,其特征在于:所述底座内设有行进装置;
所述行进装置用于带动所述底座行进,所述底座上端面通过转向电机转动设有转动柱,所述转动柱内设有高度调节装置,所述高度调节装置包括可升降的升降臂;
所述升降臂左端面固设有安装板,所述安装板下端之间固设有放置板,两个所述安装板与所述放置板之间设有驱动装置,前后的所述安装板相互靠近的一端面转动安装有旋转块,所述驱动装置为所述旋转块转动提供动力;
所述旋转块内设有摆动装置,所述摆动装置包括可升降的摆臂,前后的所述摆臂相互靠近的一端面转动安装有夹持块,则所述旋转块摆动时带动所述摆臂摆动,使得所述夹持块摆动至待搬运的砖块两侧,后侧的所述夹持块可前后移动调节两个所述夹持块之间的距离,从而将砖块夹紧于所述夹持块之间,当所述旋转块带动所述摆臂向竖直状态摆动时,所述夹持块转动带动砖块转动一百八十度放置于所述放置板上,进而通过所述行进装置带动砖块移动。
2.如权利要求1所述的一种自动搬砖机械手,其特征在于:后侧的所述摆臂内固设有液压缸,所述液压缸前端动力安装有伸缩轴,后侧的所述夹持块与所述伸缩轴前端转动连接。
3.如权利要求1所述的一种自动搬砖机械手,其特征在于:前后的所述夹持块相互靠近的一端面固设有防滑垫用以夹持防滑。
4.如权利要求1所述的一种自动搬砖机械手,其特征在于:所述行进装置包括左右对称的开口朝下的履带槽;
所述履带槽内转动设有前后对称的行进轮,前后的所述行进轮之间通过履带动力连接,前侧的所述行进轮与后侧的所述行进轮中心之间分别通过行进轴固连,前侧的所述行进轴右端动力连接于安装在右侧的所述履带槽右端壁上的行进电机上。
5.如权利要求1所述的一种自动搬砖机械手,其特征在于:所述高度调节装置包括开口朝左的升降槽;
所述升降槽上端壁固设有升降电机,所述升降电机下端动力安装有下端与所述升降槽下端壁转动连接的滚珠丝杠,所述升降臂与所述滚珠丝杠螺纹连接。
6.如权利要求1所述的一种自动搬砖机械手,其特征在于:所述驱动装置包括前后对称的传动槽;
设有所述传动槽内均转动设有与同侧的所述旋转块固连的转动轴,所述传动槽下侧转动设有驱动轴,所述驱动轴与所述转动轴之间通过传动皮带动力连接,前后的所述驱动轴相互靠近的一端之间动力安装有驱动电机;
前侧的所述传动槽前端壁内设有啮合腔,前侧的所述转动轴前端延伸至所述啮合腔内且固设有外齿轮,所述外齿轮内啮合连接有内齿轮,所述内齿轮中心处固设有齿轮转轴,所述齿轮转轴与所述转动轴转动连接且向后延伸。
7.如权利要求1所述的一种自动搬砖机械手,其特征在于:所述摆动装置包括所述旋转块内设置的上下贯穿的伸缩槽;
所述摆臂滑动设置于所述伸缩槽内,前后的所述伸缩槽靠近对称中心的一侧设有导滑槽,所述导滑槽内滑动设有与所述摆臂固连的导滑块,所述导滑块上下端与所述导滑槽之间固设有压力弹簧;
前侧的所述摆臂内设有同步带槽,所述同步带槽内转动设有连接轴,所述连接轴下侧转动设有旋转轴,所述旋转轴与所述连接轴之间通过同步皮带动力连接,前侧的所述夹持块与所述旋转轴后端固连,所述同步带槽前侧设有凹槽,所述连接轴前端延伸至所述凹槽内且固设有第一锥齿轮,所述第一锥齿轮上侧啮合连接有第二锥齿轮,所述第二锥齿轮上侧固设有直齿轮;
前侧的所述伸缩槽前端壁内设有转动腔,所述转动腔内通过安装轴转动设有与所述直齿轮啮合的转动齿柱,所述转动腔下侧设有连接腔,所述安装轴下端延伸至所述连接腔内且固设有第三锥齿轮,所述第三锥齿轮前侧啮合连接有与所述齿轮转轴后端固连的第四锥齿轮。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911320601.XA CN110978007B (zh) | 2019-12-19 | 2019-12-19 | 一种自动搬砖机械手 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911320601.XA CN110978007B (zh) | 2019-12-19 | 2019-12-19 | 一种自动搬砖机械手 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110978007A true CN110978007A (zh) | 2020-04-10 |
| CN110978007B CN110978007B (zh) | 2020-08-04 |
Family
ID=70065517
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911320601.XA Active CN110978007B (zh) | 2019-12-19 | 2019-12-19 | 一种自动搬砖机械手 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110978007B (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111395715A (zh) * | 2020-04-16 | 2020-07-10 | 永康克卡自动化设备有限公司 | 一种大型地瓷砖辅助铺设机 |
| CN112141638A (zh) * | 2020-08-06 | 2020-12-29 | 杭州旭京装饰工程有限公司 | 搬砖设备 |
| CN112407977A (zh) * | 2020-11-26 | 2021-02-26 | 林房均 | 一种固态废弃物预处理装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4094418A (en) * | 1975-10-20 | 1978-06-13 | Vereinigte Osterreichische Eisen- Und Stahlwerke-Alpine Montan Aktiengesellschaft | Apparatus for simultaneously pivoting, tilting and rotating a lining brick |
| CN1663748A (zh) * | 2005-04-12 | 2005-09-07 | 贺启宇 | 低噪声强冲击弱后坐力电锤钻 |
| CN102815417A (zh) * | 2012-08-06 | 2012-12-12 | 崔永凤 | 捡砖机械手 |
| CN106429967A (zh) * | 2016-10-27 | 2017-02-22 | 贾聪聪 | 一种红砖升降装置 |
| CN106429465A (zh) * | 2016-10-31 | 2017-02-22 | 洛阳理工学院 | 一种智能码砖机 |
| CN107235446A (zh) * | 2017-08-09 | 2017-10-10 | 刘勇 | 一种建筑装饰材料环保空心砖专用自动吊装设备 |
| CN109849113A (zh) * | 2019-04-03 | 2019-06-07 | 杭州红凌服饰有限公司 | 一种木材加工用的刨床 |
-
2019
- 2019-12-19 CN CN201911320601.XA patent/CN110978007B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4094418A (en) * | 1975-10-20 | 1978-06-13 | Vereinigte Osterreichische Eisen- Und Stahlwerke-Alpine Montan Aktiengesellschaft | Apparatus for simultaneously pivoting, tilting and rotating a lining brick |
| CN1663748A (zh) * | 2005-04-12 | 2005-09-07 | 贺启宇 | 低噪声强冲击弱后坐力电锤钻 |
| CN102815417A (zh) * | 2012-08-06 | 2012-12-12 | 崔永凤 | 捡砖机械手 |
| CN106429967A (zh) * | 2016-10-27 | 2017-02-22 | 贾聪聪 | 一种红砖升降装置 |
| CN106429465A (zh) * | 2016-10-31 | 2017-02-22 | 洛阳理工学院 | 一种智能码砖机 |
| CN107235446A (zh) * | 2017-08-09 | 2017-10-10 | 刘勇 | 一种建筑装饰材料环保空心砖专用自动吊装设备 |
| CN109849113A (zh) * | 2019-04-03 | 2019-06-07 | 杭州红凌服饰有限公司 | 一种木材加工用的刨床 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111395715A (zh) * | 2020-04-16 | 2020-07-10 | 永康克卡自动化设备有限公司 | 一种大型地瓷砖辅助铺设机 |
| CN112141638A (zh) * | 2020-08-06 | 2020-12-29 | 杭州旭京装饰工程有限公司 | 搬砖设备 |
| CN112141638B (zh) * | 2020-08-06 | 2022-06-17 | 杭州旭京装饰工程有限公司 | 搬砖设备 |
| CN112407977A (zh) * | 2020-11-26 | 2021-02-26 | 林房均 | 一种固态废弃物预处理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110978007B (zh) | 2020-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110978007B (zh) | 一种自动搬砖机械手 | |
| CN112705662B (zh) | 一种多功能锻件翻转辅助装置 | |
| CN111390566A (zh) | 一种基于不规则工件防打滑钻孔机 | |
| CN213676849U (zh) | 一种方便卸料的手推车 | |
| CN113680988A (zh) | 一种具有自动快速取料结构的压铸设备 | |
| CN112141192B (zh) | 一种减震防护型的柜类机电设备运输装置 | |
| CN211615519U (zh) | 一种便于led屏加工用翻转装置 | |
| CN216542687U (zh) | 一种轮毂抛光装置上料机构 | |
| CN115092681A (zh) | 一种用于电动自行车输送台的抓手机构 | |
| CN110125894B (zh) | 一种基于电力检修的工具放置装置 | |
| CN112623928A (zh) | 一种管柱状物的起吊设备 | |
| CN111706083A (zh) | 一种用于建造混凝土柱的辅助浇筑装置 | |
| CN216664925U (zh) | 一种建筑施工用自锁紧钢结构托架 | |
| CN211893329U (zh) | 一种汽车生产加工用辅助设备 | |
| CN110775794B (zh) | 一种用于残疾人的自动过马路机 | |
| CN211101347U (zh) | 一种提高操作安全性的夹杆锤 | |
| CN113352487A (zh) | 一种大理石加工辅助设备 | |
| CN218843891U (zh) | 一种立体车库的驱动升降结构 | |
| CN112496185A (zh) | 一种能够固定工件的汽修压力机 | |
| CN217025042U (zh) | 一种用于龙门型数控铣床的工件吊装夹持设备 | |
| CN110921584A (zh) | 一种饮水机配备的换桶起重机 | |
| CN219426757U (zh) | 一种集装箱翻转机构 | |
| CN111021695A (zh) | 一种方便移动的墙面刷漆施工用梯子 | |
| CN214109401U (zh) | 一种制造智能扫地机器人用翻转装置 | |
| CN110949478A (zh) | 一种防碎玻璃手推运输车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20200702 Address after: 528000 Guangdong Province, Foshan city Chancheng District Nanzhuang Town, east side of Jin Shi Zi Nan Ao West No. 7 Sancang Applicant after: FOSHAN RUIBO CERAMICS ELECTRICAL & MECHANICAL Co.,Ltd. Address before: No. 164 Yanshanjiao Village, Zhuge Town, Lanxi City, Jinhua City, Zhejiang Province, 321000 Applicant before: Lanxi Microcloud Automation Technology Co.,Ltd. |
|
| GR01 | Patent grant | ||
| GR01 | Patent grant |