CN110829471A - 电动机驱动系统 - Google Patents
电动机驱动系统 Download PDFInfo
- Publication number
- CN110829471A CN110829471A CN201910746049.4A CN201910746049A CN110829471A CN 110829471 A CN110829471 A CN 110829471A CN 201910746049 A CN201910746049 A CN 201910746049A CN 110829471 A CN110829471 A CN 110829471A
- Authority
- CN
- China
- Prior art keywords
- power
- storage device
- power storage
- power supply
- link
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/34—Parallel operation in networks using both storage and other dc sources, e.g. providing buffering
- H02J7/345—Parallel operation in networks using both storage and other dc sources, e.g. providing buffering using capacitors as storage or buffering devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J3/00—Circuit arrangements for ac mains or ac distribution networks
- H02J3/28—Arrangements for balancing of the load in a network by storage of energy
- H02J3/30—Arrangements for balancing of the load in a network by storage of energy using dynamo-electric machines coupled to flywheels
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J1/00—Circuit arrangements for dc mains or dc distribution networks
- H02J1/14—Balancing the load in a network
- H02J1/16—Balancing the load in a network using dynamo-electric machines coupled to flywheels
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J3/00—Circuit arrangements for ac mains or ac distribution networks
- H02J3/28—Arrangements for balancing of the load in a network by storage of energy
- H02J3/32—Arrangements for balancing of the load in a network by storage of energy using batteries with converting means
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/4826—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode operating from a resonant DC source, i.e. the DC input voltage varies periodically, e.g. resonant DC-link inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P3/00—Arrangements for stopping or slowing electric motors, generators, or dynamo-electric converters
- H02P3/06—Arrangements for stopping or slowing electric motors, generators, or dynamo-electric converters for stopping or slowing an individual dynamo-electric motor or dynamo-electric converter
- H02P3/18—Arrangements for stopping or slowing electric motors, generators, or dynamo-electric converters for stopping or slowing an individual dynamo-electric motor or dynamo-electric converter for stopping or slowing an ac motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J2207/00—Indexing scheme relating to details of circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J2207/50—Charging of capacitors, supercapacitors, ultra-capacitors or double layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
提供一种具有蓄电装置的电动机驱动系统。电动机驱动系统具备:电源部,其用于向直流环节供给直流电力;驱动用伺服放大器,其用于将直流环节中的直流电力变换成交流电力后作为驱动电力向驱动用伺服电动机供给;蓄电装置,其进行对于来自直流环节的直流电力的蓄电或者向直流环节的直流电力的供电;消耗电力计算部,其用于对由驱动用伺服电动机、驱动用伺服放大器以及电源部消耗的电力的总和即总消耗电力进行计算;以及蓄电装置控制部,其用于根据总消耗电力来控制蓄电装置的蓄电和供电,其中,蓄电装置控制部基于不同的阈值进行与蓄电装置的蓄电或供电有关的开始判定和结束判定。
Description
技术领域
本发明涉及一种具有蓄电装置的电动机驱动系统。
背景技术
在对设置在包括机床、机器人等的机械中的伺服电动机(以下称为“驱动用伺服电动机”。)进行驱动的电动机驱动系统中,利用顺变换器将从交流电源供给的交流电力变换成直流电力后输出到直流环节,并且利用逆变换器将直流环节的直流电力变换成交流电力,并将该交流电力用作驱动用伺服电动机的驱动电力。“直流环节”是指将顺变换器的直流输出侧与逆变换器的直流输入侧电连接的电路部分,有时也被称为“直流环节部”、“DC环节”、“DC环节部”或“直流中间电路”等。一般地,为了降低电动机驱动系统的成本、占用空间,大多针对多个逆变换器设置一个顺变换器。即,将用于将从交流电源供给的交流电力变换成直流电力的顺变换器设为共用的电源部,多个驱动用伺服放大器(逆变换器)使用从该电源部输出的直流电力,来生成用于驱动各驱动用伺服电动机的交流电力。
在电动机驱动系统中对驱动用伺服电动机进行加速或减速控制时,对于交流电源来说,要求大的交流电力的输出或再生,因此产生电力峰。特别是在对一个电源部(顺变换器)连接多个驱动用伺服放大器(逆变换器)的电动机驱动系统中,产生的电力峰也有可能更大。电力峰越大,电源部的容量、电动机驱动系统的运行成本就越大,或者在交流电源侧会发生停电、闪烁等电力故障,因此期望减小电力峰。
为了减小电力峰,以往使用了如下方法:在电动机驱动系统的用于将电源部与驱动用伺服放大器进行连接的直流环节中设置能够蓄积直流电力的蓄积装置,经由直流环节适当地交换在驱动用伺服电动机中消耗、再生的能量。根据该方法,能够在驱动用伺服电动机的减速时将从驱动用伺服电动机产生的再生电力蓄积在蓄积装置中,或者能够在驱动用伺服电动机的加速时再次使用蓄积的电力,因此能够减小电力峰。也就是说,通过使用针对直流环节进行电力的输入输出的蓄电装置,也能够应对伴随比电源部的最大供给电力大的消耗电力那样的驱动用伺服电动机的动作(例如加减速)。作为蓄电装置的例子,有飞轮型、电容器型等。
如果列举一例,则压力机存在以下问题:在进行冲压动作时产生的最大消耗电力非常大,电源部的容量不足。因此,在压力机的电动机驱动系统中,在直流环节中设置飞轮型的蓄电装置,在压力机消耗大电力的情况下,通过从蓄电装置供给电力,能够在小容量的电源部之下进行压力机的驱动。例如,在驱动用伺服电动机的消耗电力少时,预先使结合有飞轮的缓冲器用伺服电动机以固定速度旋转,在由于驱动用伺服电动机的加减速等导致消耗电力增大时,降低缓冲器用伺服电动机的转速并经由缓冲器用逆变器(inverter)进行电力再生,向直流环节供给用于对驱动用伺服电动机进行驱动的直流电力。由此,通过使用来自结合有具有旋转能量的飞轮的缓冲器用伺服电动机的再生电力,也能够对伴随比电源部的最大输出电力大的消耗电力那样的驱动用伺服电动机的加减速动作进行驱动。
例如,如在日本特开2013-009524号公报中所记载的那样,已知一种电动机驱动装置,其特征在于,具备:交流直流变换器,其用于将来自交流电源的交流电力变换成直流电力;直流交流变换器,其用于将直流电力变换成用于电动机的驱动的交流电力或者将从电动机再生的交流电力变换成直流电力;直流环节部,其用于将所述交流直流变换器的直流侧与所述直流交流变换器的直流侧连接,来进行直流电力的交接;能量蓄积部,其与所述直流环节部连接,用于蓄积来自所述直流环节部的直流电力或者向所述直流环节部供给直流电力,且具有至少一个电容器蓄积部和至少一个飞轮蓄积部;电动机控制部,其基于用于指示电动机的动作的电动机动作指令来进行控制,使得所述直流交流变换器输出期望的交流电力;以及能量控制部,其进行控制,使得所述能量蓄积部蓄积来自所述直流环节部的直流电力或者向所述直流环节部供给直流电力。
例如,如在日本特开2016-046833号公报中所记载的那样,已知一种伺服电动机的控制系统,该伺服电动机用于对产业机械、机床的轴进行驱动,所述伺服电动机的控制系统的特征在于,具有:多个第一伺服电动机,所述多个第一伺服电动机用于对轴进行驱动;多个转换器,所述多个转换器用于将交流电压变换成直流电压;多个第一逆变器,所述多个第一逆变器用于从所述转换器接收直流电压并变换成用于驱动所述多个第一伺服电动机的交流电压,或者将从所述第一伺服电动机再生的交流电力变换成直流电力;第二伺服电动机,其用于使惯性件旋转;多个第二逆变器,所述多个第二逆变器用于从所述变换器接收直流电压并变换成用于驱动所述第二伺服电动机的交流电压,或者用于将从所述第二伺服电动机再生的交流电力变换成直流电力;以及伺服电动机控制装置,其用于控制所述多个第一伺服电动机和所述第二伺服电动机,其中,所述第二伺服电动机的数量比所述多个第二逆变器的数量少,所述第二伺服电动机中的至少一个第二伺服电动机具备多个独立的绕组,所述多个第二逆变器中的至少一部分第二逆变器与设置于一个第二伺服电动机的多个独立的绕组连接。
发明内容
在设置有用于减小电源设备的电力峰的蓄电装置的电动机驱动系统中,例如根据作为由驱动用伺服电动机、驱动用伺服放大器以及电源部消耗的电力的总和的“总消耗电力”的增减来进行蓄电装置的蓄电的开始和结束以及供电的开始和结束。当由于某种原因导致在结合于驱动用伺服电动机的驱动轴处产生与基于原来的控制的动作不同的振动时,该振动传递到驱动用伺服电动机的旋转轴,其结果,驱动用伺服电动机的输出变得振动。如果列举一例,则如果在压力机中进行冲压时加压部与工件接触,则对加压部作用应力而使结合于加压部的驱动用伺服电动机发生振动。一般地,驱动用伺服电动机中的绕组损耗、电源部中的损耗以及驱动用伺服放大器中的损耗比驱动用伺服电动机的输出的绝对值小,因此驱动用伺服电动机的输出对总消耗电力造成的影响显著。因而,驱动用伺服电动机的输出的振动大致与总消耗电力的振动对应。当总消耗电力振动时,频繁地进行蓄电装置的蓄电的开始和结束以及供电的开始和结束。例如在飞轮型的蓄电装置的情况下,结合有飞轮的缓冲器用伺服电动机频繁地进行不必要的加减速,因此对缓冲器用伺服电动机造成很大负担,容易发生故障,寿命缩短。另外,例如在电容器型的蓄电装置的情况下,由于电容器发生振动性的电压变动,因此对电容器造成很大负担,容易发生故障,寿命缩短。因而,期望如下一种技术:在具有为了减小电源设备的电力峰而设置的蓄电装置的电动机驱动系统中,能够避免蓄电装置的故障从而实现长寿命化。
根据本公开的一个方式,电动机驱动系统具备:电源部,其用于向直流环节供给直流电力;驱动用伺服放大器,其用于将直流环节中的直流电力变换成交流电力并作为驱动电力向驱动用伺服电动机供给;蓄电装置,其进行对于来自直流环节的直流电力的蓄电或者向直流环节的直流电力的供电;消耗电力计算部,其用于对由驱动用伺服电动机、驱动用伺服放大器以及电源部消耗的电力的总和即总消耗电力进行计算;蓄电装置控制部,其用于根据总消耗电力来控制蓄电装置的蓄电和供电,其中,蓄电装置控制部基于不同的阈值来进行与蓄电装置的蓄电或供电有关的开始判定和结束判定。
附图说明
通过参照以下附上的附图来更加明确地理解本发明。
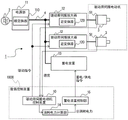
图1是本公开的实施方式的电动机驱动系统的框图。
图2是具有飞轮型的蓄电装置的一个实施方式的电动机驱动系统的框图。
图3是具有电容器型的蓄电装置的一个实施方式的电动机驱动系统的框图。
图4是例示从本公开的实施方式的电动机驱动系统内的蓄电装置向直流环节供给的直流电力与从电源部向直流环节供给的直流电力的关系的图。
图5是示出本公开的实施方式的电动机驱动系统的动作流程的流程图。
图6是例示本公开的实施方式的具有飞轮型的蓄电装置的电动机驱动系统中的总消耗电力与蓄电装置控制部输出的速度指令的关系的图。
图7是例示本公开的实施方式的具有电容器型的蓄电装置的电动机驱动系统中的总消耗电力与蓄电装置控制部输出的电压指令的关系的图。
图8是例示在以往的电动机驱动系统中以同一个蓄电用阈值探测飞轮型的蓄电装置的蓄电开始和蓄电结束、以同一个供电用阈值探测蓄电装置的供电开始和供电结束的情况下的总消耗电力与蓄电装置控制部输出的速度指令的关系的图。
具体实施方式
以下,参照附图来说明具有蓄电装置的电动机驱动系统。在各附图中对同样的构件标注了同样的参照附图标记。另外,为了易于理解,适当变更了这些附图的比例尺。附图所示的方式是用于实施的一个例子,并不限定于图示的方式。另外,设为在“驱动用伺服电动机的输出”中包括“驱动用伺服电动机的消耗电力”和“驱动用伺服电动机的再生电力”、在“缓冲器用伺服电动机的输出”中包括“缓冲器用伺服电动机的消耗电力”和“缓冲器用伺服电动机的再生电力”。另外,分别将“消耗电力”设为正,将“再生电力”设为负。另外,驱动用伺服电动机和缓冲器用伺服电动机的旋转角速度简称为“速度”。另外,“电力的值”是指“电流每单位时间所做的功”、即“功率”,单位是“W(瓦特)”。“能量的值”是指“电流做的功”、即“电力量”,单位是“J(焦耳)”。因而,“能量的值[J]=电力的值[W]×时间[s]”的关系成立。
图1是本公开的实施方式的电动机驱动系统的框图。在此,作为一例,对由电动机驱动系统1控制两个驱动用伺服电动机3的情况进行说明。但是,驱动用伺服电动机3的个数并不特别限定本实施方式,也可以是一个或三个以上。另外,交流电源2和驱动用伺服电动机3的相数并不特别限定本实施方式,例如既可以是三相交流也可以是单相交流。另外,驱动用伺服电动机3的种类也并不特别限定本实施方式,例如既可以是感应电动机也可以是同步电动机。在此,在设置有驱动用伺服电动机3的机械中包括机床、机器人、锻压机械、注塑机、产业机械、各种电气化产品、电车、汽车以及飞机等。另外,如果列举交流电源2的一例,则有三相交流400V电源、三相交流200V电源、三相交流600V电源以及单相交流100V电源等。
首先,说明电动机驱动系统1的各电路结构要素。
如图1所示,一个实施方式的电动机驱动系统1具备电源部11、驱动用伺服放大器12、蓄电装置13、消耗电力计算部14以及蓄电装置控制部15。另外,电动机驱动系统1具备驱动用伺服电动机控制装置10。在图示的实施方式中,作为一例,消耗电力计算部14、蓄电装置控制部15以及驱动用伺服电动机控制装置10设置于机床的数值控制装置1000。此外,也可以在除数值控制装置1000以外的运算处理装置内设置消耗电力计算部14、蓄电装置控制部15以及驱动用伺服电动机控制装置10。
电源部11向直流环节4供给直流电力。在图示的实施方式中,电源部11例如由顺变换器110构成,所述顺变换器110用于将从交流电源2供给的交流电力变换成直流电力后向直流环节4输出。在从交流电源2供给三相交流的情况下,顺变换器110由三相桥电路构成,在从交流电源2供给单相交流的情况下,顺变换器110由单相桥电路构成。作为顺变换器110的例子,具有二极管整流电路、120度通电型整流电路以及PWM开关控制方式的整流电路等。例如,在顺变换器110是二极管整流电路的情况下,对从交流电源2供给的交流电流进行整流并向直流环节4输出直流电流。另外,例如在顺变换器110是PWM开关控制方式的整流电路的情况下,包括开关元件以及与该开关元件反向并联连接的二极管的桥电路,例如根据从数值控制装置1000接收到的驱动指令对各开关元件进行接通断开控制,从而向交直双向进行电力变换。作为开关元件的例子,具有FET等单极型晶体管、双极型晶体管、IGBT、晶闸管、GTO等。但是开关元件的种类本身并不限定本实施方式,也可以是其它开关元件。
另外,关于电源部11内的顺变换器110,作为能够从交流电力电力变换成直流电力后向直流环节4供给的最大电力,规定了“最大供给电力”。最大供给电力一般被规定为与顺变换器110的变换容量有关的各原始数据,例如被记载在顺变换器110的规格表、使用说明书等中。此外,在电源部11内的顺变换器110由如PWM开关控制方式的整流电路等那样能够向交直双向进行电力变换的装置构成的情况下,作为能够从直流环节4中的直流电力电力变换成交流电力后向交流电源2侧再生的最大电力,规定了“最大再生电力”。最大再生电力一般被规定为与能够向交直双向进行电力变换的顺变换器110的变换容量有关的各原始数据,例如被记载在顺变换器110的规格表、使用说明书等中。以下,在本说明书中有时将顺变换器110的最大供给电力和最大再生电力合称为“最大变换电力”。
此外,电源部11例如也可以由一次电池、二次电池或太阳能电池构成。
如图1所示,在电源部11由顺变换器110构成的情况下,一般在直流环节4中设置直流环节电容器(也称为平滑电容器),但是在此省略图示。直流环节电容器具有在直流环节4中蓄积直流电力的功能和对电源部11内的顺变换器110的直流输出的脉动成分进行抑制的功能。
驱动用伺服放大器12经由直流环节4连接于电源部11。驱动用伺服放大器12使用直流环节4中的直流电力对驱动用伺服电动机3进行驱动。一般地,在驱动用伺服电动机3中设置有一个以上的绕组,为了对驱动用伺服电动机3进行驱动,该驱动用伺服电动机3内的每一个绕组需要一个驱动用伺服放大器12。在图1中,作为一例,将驱动用伺服电动机3设为一个绕组类型的电动机,因而,对一个驱动用伺服电动机3连接一个驱动用伺服放大器12。
为了对驱动用伺服电动机3进行驱动,驱动用伺服放大器12将直流环节4中的直流电力变换成交流电力后作为驱动电力向驱动用伺服电动机3供给。因此,驱动用伺服放大器12例如具有逆变换器120。驱动用伺服放大器12内的逆变换器120基于从驱动用伺服电动机控制装置10接收到的驱动指令对各开关元件进行接通断开控制,由此在直流环节4的直流电力与作为驱动用伺服电动机3的驱动电力或再生电力的交流电力之间进行电力变换。逆变换器120包括开关元件以及与该开关元件反向并联连接的二极管的桥电路,例如基于三角波比较方式的PWM开关控制对各开关元件进行接通断开控制。在驱动用伺服电动机3是三相电动机的情况下,逆变换器120由三相桥电路构成,在驱动用伺服电动机3是单相电动机的情况下,逆变换器120由单相桥电路构成。作为开关元件的例子,具有FET等单极型晶体管、双极型晶体管、IGBT、晶闸管、GTO等,但是开关元件的种类本身并不限定本实施方式,也可以是其它开关元件。
驱动用伺服放大器12内的逆变换器120基于从后述的驱动用伺服电动机控制装置10接收到的驱动指令对各开关元件进行接通断开控制,由此在直流环节4的直流电力与作为驱动用伺服电动机3的驱动电力或再生电力的交流电力之间进行电力变换。更详细地说,逆变换器120基于从驱动用伺服电动机控制装置10接收到的驱动指令使内部的开关元件进行开关动作,将经由直流环节4从电源部11供给的直流电力变换成用于对驱动用伺服电动机3进行驱动的具有期望的电压和期望的频率的交流电力(逆变换动作)。由此,驱动用伺服电动机3例如基于电压可变及频率可变的交流电力进行动作。另外,在驱动用伺服电动机3减速时有时会产生再生电力,基于从驱动用伺服电动机控制装置10接收到的驱动指令使内部的开关元件进行开关动作,将在驱动用伺服电动机3中产生的交流的再生电力变换成直流电力后返回到直流环节4(顺变换动作)。
驱动用伺服电动机控制装置10进行控制,使得与驱动用伺服放大器12连接的驱动用伺服电动机3以规定的动作模式进行动作(即旋转)。通过根据设置有驱动用伺服电动机3的机械的动作内容将加速、减速、恒速以及停止适当地组合,来构成驱动用伺服电动机3的动作模式。利用针对驱动用伺服电动机3的动作程序来规定驱动用伺服电动机3的动作模式。例如在驱动用伺服电动机3设置于机床的情况下,规定针对驱动用伺服电动机3的动作程序来作为用于机床的加工程序之一。
此外,基于从驱动用伺服放大器12内的逆变换器120供给的例如电压可变及频率可变的交流电力来控制驱动用伺服电动机3的速度、转矩或转子的位置,因此,结果是由驱动用伺服电动机控制装置10进行的驱动用伺服电动机3的控制是通过控制驱动用伺服放大器12内的逆变换器120的电力变换动作来实现的。也就是说,驱动用伺服电动机控制装置10进行如下控制:通过按照预先规定的动作程序来控制驱动用伺服放大器12内的逆变换器120的电力变换,来使驱动用伺服电动机3按照规定的动作模式进行动作。更具体地说如下。驱动用伺服电动机控制装置10基于由速度检测器51检测出的驱动用伺服电动机3的速度(速度反馈)、在驱动用伺服电动机3的绕组中流动的电流(电流反馈)、规定的转矩指令以及驱动用伺服电动机3的动作程序等来生成用于控制驱动用伺服电动机3的速度、转矩或转子的位置的驱动指令。基于由驱动用伺服电动机控制装置10生成的驱动指令来控制驱动用伺服放大器12内的逆变换器120的电力变换动作。此外,在此定义的驱动用伺服电动机控制装置10的结构只是一例,例如也可以包括位置指令生成部、转矩指令生成部以及开关指令生成部等用语地规定驱动用伺服电动机控制装置10的结构。
为了能够以超过电源部11内的顺变换器110的最大供给电力的输出对驱动用伺服电动机3进行驱动且使超过电源部11内的顺变换器110的最大再生电力的电力从直流环节4返回到交流电源2侧,在电动机驱动系统1中设置用于对电源部11进行辅助的蓄电装置13。
蓄电装置13蓄积来自直流环节4的直流电力(蓄电),向直流环节4供给直流电力(供电)。蓄电装置13的蓄电和供电的各动作由蓄电装置控制部15进行控制。作为蓄电装置13应该保有的能量的基准值(目标值),规定了“基础保有能量”。通过蓄电装置控制部15的控制对蓄电装置13进行蓄电,以使其保有能量成为作为该目标值的基础保有能量。例如在驱动用伺服电动机3不进行动作且不格外需要由蓄电装置13进行电力的输入输出的期间,蓄电装置13的保有能量维持基础保有能量。当由蓄电装置13进行供电时,蓄电装置13的保有能量降低且成为比基础保有能量小的值,但当由蓄电装置13进行蓄电时,蓄电装置13的保有能量上升并恢复为作为目标值的基础保有能量。此外,根据电动机驱动系统1对驱动用伺服电动机3的驱动状况,有时在蓄电装置13的保有能量恢复到基础保有能量之前进行蓄电装置13的供电动作。
蓄电装置13例如具有如图2所示的飞轮型和如图3所示的电容器型。
图2是具有飞轮型的蓄电装置的一个实施方式的电动机驱动系统的框图。飞轮型的蓄电装置13具备飞轮132、缓冲器用伺服电动机131以及缓冲器用伺服放大器130。
飞轮132能够蓄积旋转能量,也被称为惯性件。
缓冲器用伺服电动机131是用于使飞轮132旋转的电动机,将飞轮132连接于缓冲器用伺服电动机131的旋转轴。能够通过使缓冲器用伺服电动机131旋转来将旋转能量蓄积到飞轮132中。缓冲器用伺服电动机131的相数并不特别限定本实施方式,例如既可以是三相交流也可以是单相交流。在缓冲器用伺服电动机131设置有速度检测器52,由速度检测器52检测出的缓冲器用伺服电动机131的(转子的)速度用于由蓄电装置控制部15对蓄电装置13进行的控制。
缓冲器用伺服放大器130基于从蓄电装置控制部15接收到的蓄电指令和供电指令对各开关元件进行接通断开控制,由此在直流环节4中的直流电力与作为缓冲器用伺服电动机131的驱动电力或再生电力的交流电力之间进行电力变换。因此,缓冲器用伺服放大器130例如具有逆变换器330。缓冲器用伺服放大器130内的逆变换器330包括开关元件以及与该开关元件反向并联连接的二极管的桥电路。在缓冲器用伺服电动机131是三相电动机的情况下,逆变换器330由三相桥电路构成,在缓冲器用伺服电动机131是单相电动机的情况下,逆变换器330由单相桥电路构成。作为开关元件的例子,具有FET等单极型晶体管、双极型晶体管、IGBT、晶闸管、GTO等,但是开关元件的种类本身并不限定本实施方式,也可以是其它开关元件。例如,基于通过将接收到的驱动指令与三角波载波(carrier)进行比较得到的PWM开关信号,对缓冲器用伺服放大器130内的逆变换器330中设置的各开关元件进行接通断开控制。
通过由蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330的电力变换进行控制,连接有飞轮132的缓冲器用伺服电动机131一边加速或减速一边旋转或者以固定速度旋转,其结果,蓄电装置13应该蓄积或供给的直流电力量(蓄电装置13对直流环节4输入输出的直流电力量)得到调整。更详细地说如下。
在蓄电装置13进行蓄电动作的情况下,缓冲器用伺服放大器130内的逆变换器330基于从蓄电装置控制部15接收到的蓄电指令来进行用于将直流环节4中的直流电力变换成交流电力的逆变换动作。由此,向缓冲器用伺服电动机131侧取入来自直流环节4的电能,连接有飞轮132的缓冲器用伺服电动机131利用该电能进行旋转。这样,在飞轮型的蓄电装置13中将从直流环节4流入的电能变换成飞轮132的旋转能量并进行蓄积。
另外,在蓄电装置13进行供电动作的情况下,缓冲器用伺服放大器130内的逆变换器330基于从蓄电装置控制部15接收到的供电指令,使连接有飞轮132的缓冲器用伺服电动机131减速来产生交流的再生电力,从而进行将该交流电力变换成直流电力的顺变换动作。由此,飞轮132中蓄积的旋转能量变换成电能后被供给到直流环节4。
图3是具有电容器型的蓄电装置的一个实施方式的电动机驱动系统的框图。电容器型的蓄电装置13例如具备电容器134和DCDC转换器133,其中,该DCDC转换器133用于在直流环节4中的直流电力与电容器134中蓄积的直流电力之间进行电力变换。
DCDC转换器133例如具有升降压直流斩波电路等。通过由蓄电装置控制部15对DCDC转换器133的升压动作和降压动作进行控制,来调整蓄电装置13应该蓄积或供给的直流电力量(蓄电装置13对直流环节4输入输出的直流电力量)。更详细地说如下。
在蓄电装置13进行蓄电动作的情况下,DCDC转换器133基于从蓄电装置控制部15接收到的蓄电指令被蓄电装置控制部15控制,使得电容器134侧的直流电压比直流环节4侧的直流电压低。由此,来自直流环节4的电能流入电容器134来进行蓄电装置13的蓄电。
另外,在蓄电装置13进行供电动作的情况下,DCDC转换器133基于从蓄电装置控制部15接收到的供电指令被蓄电装置控制部15控制,使得电容器134侧的直流电压比直流环节4侧的直流电压高。由此,来自电容器134的电能流入直流环节4来进行蓄电装置13的供电。
在电动机驱动系统1中,例如在驱动用伺服电动机3加速时,除了向驱动用伺服电动机3供给从电源部11供给的能量以外,还向驱动用伺服电动机3供给蓄电装置13中蓄积的能量,来用作用于驱动用伺服电动机3的加速的动力。图4是例示从本公开的实施方式的电动机驱动系统内的蓄电装置向直流环节供给的直流电力与从电源部向直流环节供给的直流电力之间的关系的图。从电源部11向直流环节4供给的电力除了作为驱动用伺服电动机3的驱动电力(即,驱动用伺服电动机3的输出所对应的电力)被消耗以外,还作为驱动用伺服电动机3中的绕组损耗、电源部11中的损耗以及驱动用伺服放大器12中的损耗被消耗。在此,将由驱动用伺服电动机3、驱动用伺服放大器12以及电源部11消耗的电力的总和称为“总消耗电力”,在图4中用实线表示该“总消耗电力”。点划线表示电源部11的最大供给电力。如图4所示,利用从蓄电装置13向直流环节4供给的直流电力来补偿总消耗电力中的超过电源部11的最大供给电力的部分(图中用斜线表示的区域)。
在电动机驱动系统1中,例如在驱动用伺服电动机3减速时,从驱动用伺服电动机3再生的能量被蓄积在蓄电装置13中。蓄电装置13中蓄积的能量与电源部11所供给的电力一起用于驱动用伺服电动机3的驱动,因此能够利用超过电源部11的最大供给电力的输出对驱动用伺服电动机3进行驱动,能够减小电力峰。另外,即使在驱动用伺服电动机3中产生超过电源部11的最大再生电力的再生电力,也将该超过的电力部分蓄积在蓄电装置13中,因此能够减小电力峰。通过减小电力峰能够抑制电源容量、电动机驱动系统1的运用成本,另外,能够避免交流电源2侧的停电、闪烁。
返回到图1来进行说明,消耗电力计算部14对驱动用伺服电动机3的消耗电力(驱动用伺服电动机3的输出以及绕组损耗)、由驱动用伺服放大器12消耗的电力(驱动用伺服放大器12中的损耗)以及由电源部11消耗的电力(电源部11中的损耗)的总和、即总消耗电力进行计算。在此,通过由速度检测器51检测出的驱动用伺服电动机3的转速与驱动用伺服电动机3的转矩的乘法运算来获得驱动用伺服电动机3的输出。在驱动用伺服电动机3加速时,驱动用伺服电动机3消耗从驱动用伺服放大器12供给的交流电力,将该电力消耗时的驱动用伺服电动机3的输出设为“正”。因而,在通过驱动用伺服电动机3减速来再生电力时,驱动用伺服电动机3的输出为“负”。通常,驱动用伺服电动机3中的绕组损耗、电源部11中的损耗以及驱动用伺服放大器12中的损耗小于驱动用伺服电动机3的输出的绝对值,因此驱动用伺服电动机3的输出对总消耗电力的影响显著。因而,驱动用伺服电动机3的输出的正负(消耗或再生)大致与总消耗电力的正负对应。此外,如图1所例示那样,在分别存在多个驱动用伺服放大器12和驱动用伺服电动机3的情况下,消耗电力计算部14对多个驱动用伺服电动机3的输出、多个驱动用伺服电动机3中的绕组损耗、电源部11中的损耗以及多个驱动用伺服放大器12中的损耗的总和进行计算,来作为总消耗电力。
此外,作为蓄电装置13的缓冲器用伺服放大器130和DCDC转换器133也存在损耗,因此消耗电力计算部14也可以计算对驱动用伺服电动机3的输出、驱动用伺服电动机3中的绕组损耗、电源部11中的损耗以及驱动用伺服放大器12中的损耗之和进一步加上缓冲器用伺服放大器130和DCDC转换器133中的损耗所得到的和,来作为总消耗电力。另外,在分别存在多个缓冲器用伺服放大器130和DCDC转换器133的情况下,也可以计算对驱动用伺服电动机3的输出、驱动用伺服电动机3中的绕组损耗、电源部11中的损耗以及驱动用伺服放大器12中的损耗之和进一步加上多个缓冲器用伺服放大器130和多个DCDC转换器133中的损耗的总和所得到的和,来作为总消耗电力。
蓄电装置控制部15根据由消耗电力计算部14计算出的总消耗电力来控制蓄电装置13的蓄电和供电。即,蓄电装置控制部15向蓄电装置13输出用于控制为向直流环节4供给蓄电装置13中蓄积的直流电力的供电指令,且向蓄电装置13输出用于控制为将直流环节4中的直流电力蓄积于蓄电装置13的蓄电指令。蓄电装置13在从蓄电装置控制部15接收到供电指令的情况下进行供电动作,在从蓄电装置控制部15接收到蓄电指令的情况下进行蓄电动作。在图2所示的飞轮型的蓄电装置13的情况下,蓄电装置控制部15控制蓄电装置13内的缓冲器用伺服放大器130内的逆变换器330的电力变换动作,在图3所示的电容器型的蓄电装置13的情况下,蓄电装置控制部15控制蓄电装置13内的DCDC转换器133的升降压动作,由此控制蓄电装置13的蓄电和供电。
在本公开的实施方式中,蓄电装置控制部15基于不同的阈值来进行与蓄电装置13的蓄电有关的开始判定和结束判定。另外,蓄电装置控制部15基于不同的阈值来进行与蓄电装置13的供电有关的开始判定和结束判定。更为详细的说明如下。
基于由消耗电力计算部14计算出的总消耗电力与蓄电开始阈值的比较结果来进行蓄电装置13的蓄电的开始判定,基于由消耗电力计算部14计算出的总消耗电力与蓄电结束阈值的比较结果来进行在蓄电开始后进行的蓄电装置13的蓄电的结束判定。在通过驱动用伺服电动机3的减速等产生的再生电力超过电源部11内的顺变换器110的最大再生电力的情况下,需要向蓄电装置13进行蓄电,因此将蓄电开始阈值设定为用于探测蓄电装置13的蓄电开始的定时的判定值。蓄电开始阈值例如被设定为与电源部11内的顺变换器110的最大再生电力相同的值或其以下的值。另外,将蓄电结束阈值设定为用于在蓄电装置13的蓄电开始后探测蓄电结束的定时的判定值。在此,蓄电结束阈值的绝对值被设定为比蓄电开始阈值的绝对值小的值。即,蓄电开始阈值与蓄电结束阈值之差为与蓄电有关的阈值的滞后宽度。如下那样设定蓄电结束阈值即可。例如,利用电动机驱动系统1使驱动轴实际地动作,并实际测量由与基于原本的控制的动作不同的振动引起的总消耗电力的振动幅度的最大幅度(以下称为“实测振动最大幅度”。)。然后,将蓄电结束阈值设定为使蓄电结束阈值的绝对值比蓄电开始阈值的绝对值小实测振动最大幅度即可。
控制蓄电装置13并开始进行来自直流环节4的直流电力的蓄电。在蓄电装置13的蓄电开始后,蓄电装置控制部15将由消耗电力计算部14计算出的总消耗电力与蓄电结束阈值进行比较,在比较的结果是判定为总消耗电力超过蓄电结束阈值的情况下,蓄电装置控制部15控制蓄电装置13以结束来自直流环节4的直流电力的蓄电。蓄电结束阈值的绝对值被设定为比蓄电开始阈值的绝对值小的值,因此蓄电装置13结束蓄电时的总消耗电力(负值)为比蓄电装置13开始蓄电时的总消耗电力(负值)大的值。蓄电装置13开始蓄电的定时例如与蓄电装置控制部15开始对蓄电装置13输出蓄电指令的定时对应。另外,蓄电装置13结束蓄电的定时例如与蓄电装置控制部15结束对蓄电装置13输出蓄电指令的定时对应。
基于由消耗电力计算部14计算出的总消耗电力与供电开始阈值的比较结果来进行蓄电装置13的供电的开始判定,基于由消耗电力计算部14计算出的总消耗电力与供电结束阈值的比较结果来进行在供电开始后进行的蓄电装置13的蓄电的结束判定。在通过驱动用伺服电动机3的加速等使驱动用伺服电动机3的输出增加且超过电源部11内的顺变换器110的最大供给电力的情况下,需要从蓄电装置13进行供电,因此将供电开始阈值设定为用于探测蓄电装置13的供电开始的定时的判定值。供电开始阈值例如被设定为与电源部11内的顺变换器110的最大供给电力相同的值或其以下的值。另外,将供电结束阈值设定为用于在蓄电装置13的供电开始后探测供电结束的定时的判定值。在此,供电结束阈值的绝对值被设定为比供电开始阈值的绝对值小的值。即,供电开始阈值与供电结束阈值之差为与供电有关的阈值的滞后宽度。如下那样设定供电结束阈值即可。例如,利用电动机驱动系统1使驱动轴实际地动作,并实际测量由与基于原本的控制的动作不同的振动引起的总消耗电力的振动幅度的最大幅度(以下称为“实测振动最大幅度”。)。然后,将供电结束阈值设定为使供电结束阈值的绝对值比供电开始阈值的绝对值小实测振动最大幅度即可。此外,由于蓄电装置13的供电动作、蓄电动作导致来自电源部11的供给电力发生变化,但是不影响驱动用伺服电动机3的动作(即,不影响总消耗电力的变化)。因而,在为了设定供电结束阈值而进行的上述振动的实际测量时,既可以使蓄电装置13进行供电动作和蓄电动作,或者也可以使蓄电装置13的供电动作和蓄电动作停止。
蓄电装置控制部15将由消耗电力计算部14计算出的总消耗电力与供电开始阈值进行比较,在比较的结果是判定为总消耗电力超过供电开始阈值的情况下,蓄电装置控制部15控制蓄电装置13以开始向直流环节4供给直流电力。在蓄电装置13的供电开始后,蓄电装置控制部15将由消耗电力计算部14计算出的总消耗电力与供电结束阈值进行比较,在比较的结果是判定为总消耗电力低于供电结束阈值的情况下,蓄电装置控制部15控制蓄电装置13以结束向直流环节4供给直流电力。供电结束阈值的绝对值被设定为比供电开始阈值的绝对值小的值,因此蓄电装置13结束供电时的总消耗电力(正值)为比蓄电装置13开始供电时的总消耗电力(正值)小的值。蓄电装置13开始供电的定时例如与蓄电装置控制部15开始对蓄电装置13输出供电指令的定时对应。另外,蓄电装置13结束供电的定时例如与蓄电装置控制部15结束对蓄电装置13输出供电指令的定时对应。
接下来说明电动机驱动系统1的动作。图5是示出本公开的实施方式的电动机驱动系统的动作流程的流程图。
在步骤S101中,驱动用伺服电动机控制装置10进行控制,使得驱动用伺服电动机3以规定的动作模式进行动作。
在步骤S102中,消耗电力计算部14对由驱动用伺服电动机3、驱动用伺服放大器12以及电源部11消耗的电力的总和、即总消耗电力进行计算。
在步骤S103中,蓄电装置控制部15判定由消耗电力计算部14计算出的总消耗电力是否低于蓄电开始阈值。在判定为总消耗电力低于蓄电开始阈值的情况下进入步骤S104,在没有判定为总消耗电力低于蓄电开始阈值的情况下进入步骤S109。
在步骤S104中,蓄电装置控制部15开始对蓄电装置13输出蓄电指令。如上所述,作为蓄电装置13应该保有的能量的基准值(目标值),规定了“基础保有能量”,在蓄电装置13既没有进行蓄电动作也没有进行供电动作的情况下,将蓄电装置13的保有能量维持基础保有能量。在蓄电装置13是飞轮型的情况下,在步骤S104中开始输出蓄电指令时,蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330输出用于使缓冲器用伺服电动机131的速度变为比基础速度的速度高的速度(蓄电用速度)的速度指令(蓄电用速度指令),来代替用于使缓冲器用伺服电动机131的速度成为与基础保有能量对应的基础速度那样的速度指令(基础速度指令)。在蓄电装置13是电容器型的情况下,在步骤S104中开始输出蓄电指令时,蓄电装置控制部15对DCDC转换器133输出用于使电容器134的电压变为比基础电压高的电压(蓄电用电压)的电压指令(蓄电用电压指令),来代替用于使电容器134的电压成为与基础保有能量对应的基础电压的电压指令(基础电压指令)。
接收到蓄电指令的蓄电装置13在步骤S105中蓄积直流环节4中的直流电力。在蓄电装置13是飞轮型的情况下,缓冲器用伺服放大器130内的逆变换器330进行基于蓄电用速度指令的电力变换,由此,缓冲器用伺服电动机131的速度从基础速度起逐渐地上升而成为蓄电用速度。在蓄电装置13是电容器型的情况下,DCDC转换器133进行基于蓄电用电压指令的电力变换,由此,电容器134的电压从基础电压起逐渐地上升而成为蓄电用电压。其结果,例如相当于由消耗电力计算部14计算出的总消耗电力的绝对值与电源部11内的顺变换器110的逆变换动作的最大变换电力即最大再生电力之差的电力被蓄积于蓄电装置13。
在步骤S106中,消耗电力计算部14计算由驱动用伺服电动机3、驱动用伺服放大器12以及电源部11消耗的电力的总和、即总消耗电力。
在步骤S107中,蓄电装置控制部15判定由消耗电力计算部14计算出的总消耗电力是否超过蓄电结束阈值。在判定为总消耗电力超过蓄电结束阈值的情况下进入步骤S108,在没有判定为总消耗电力超过蓄电结束阈值的情况下返回步骤S105。
在步骤S108中,蓄电装置控制部15结束对蓄电装置13输出蓄电指令。在蓄电装置13是飞轮型的情况下,在步骤S108中结束输出蓄电指令时,蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330输出基础速度指令来代替蓄电用速度指令。在蓄电装置13是电容器型的情况下,在步骤S108中结束输出蓄电指令时,蓄电装置控制部15对DCDC转换器133输出基础电压指令来代替蓄电用电压指令。在步骤S108之后,蓄电装置13的保有能量维持基础保有能量,返回到步骤S101。
在步骤S103中没有判定为总消耗电力低于蓄电开始阈值的情况下,在步骤S109中,蓄电装置控制部15判定由消耗电力计算部14计算出的总消耗电力是否超过供电开始阈值。在判定为总消耗电力超过供电开始阈值的情况下进入步骤S110,在没有判定为总消耗电力超过供电开始阈值的情况下返回到步骤S101。
在步骤S110中,蓄电装置控制部15开始对蓄电装置13输出供电指令。在蓄电装置13是飞轮型的情况下,在步骤S110中开始输出供电指令时,蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330输出用于使缓冲器用伺服电动机131的速度变为比基础速度低的速度(供电用速度)的速度指令(供电用速度指令)来代替基础速度指令。在蓄电装置13是电容器型的情况下,在步骤S110中开始输出供电指令时,蓄电装置控制部15对DCDC转换器133输出用于使电容器134的电压变为比基础电压低的电压(供电用电压)的电压指令(供电用电压指令)来代替基础电压指令。
接收到供电指令的蓄电装置13在步骤S111中向直流环节4供给直流电力。在蓄电装置13是飞轮型的情况下,缓冲器用伺服放大器130内的逆变换器330进行基于供电用速度指令的电力变换,由此,缓冲器用伺服电动机131的速度从基础速度起逐渐地降低而成为供电用速度。在蓄电装置13是电容器型的情况下,DCDC转换器133进行基于供电用电压指令的电力变换,由此,电容器134的电压从基础电压起逐渐地降低而成为供电用电压。其结果,例如从蓄电装置13向直流环节4供给相当于由消耗电力计算部14计算出的总消耗电力(的绝对值)与电源部11内的顺变换器110的顺变换动作的最大变换电力即最大供给电力之差的电力。
在步骤S112中,消耗电力计算部14对由驱动用伺服电动机3、驱动用伺服放大器12以及电源部11消耗的电力的总和、即总消耗电力进行计算。
在步骤S113中,蓄电装置控制部15判定由消耗电力计算部14计算出的总消耗电力是否低于供电结束阈值。在判定为总消耗电力低于供电结束阈值的情况下进入步骤S114,在没有判定为总消耗电力低于供电结束阈值的情况下返回到步骤S111。
在步骤S114中,蓄电装置控制部15结束对蓄电装置13输出供电指令。在蓄电装置13是飞轮型的情况下,在步骤S114中结束输出供电指令时,蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330输出基础速度指令来代替供电用速度指令。在蓄电装置13是电容器型的情况下,在步骤S114中结束输出供电指令时,蓄电装置控制部15对DCDC转换器133输出基础电压指令来代替供电用电压指令。在步骤S114之后,蓄电装置13的保有能量维持基础保有能量,返回到步骤S101。
此外,步骤S103以及继该步骤S103之后的步骤S104~S108的处理与步骤S109以及继该步骤S109之后的步骤S110~S114的处理也可以调换地执行。
图6是例示本公开的实施方式的具有飞轮型的蓄电装置的电动机驱动系统的总消耗电力与由蓄电装置控制部输出的速度指令的关系的图。在图6中,上部的波形图例示由消耗电力计算部14计算出的总消耗电力[W],虚线示出蓄电开始阈值和供电开始阈值,点划线示出蓄电结束阈值和供电结束阈值。另外,在图6中,下部的波形图示出蓄电装置控制部15输出的速度指令。在此,作为一例,如图6的上部的波形图所示那样示出通过电动机驱动系统1使驱动用伺服电动机3加速和减速而总消耗电力发生了变化的例子。驱动用伺服放大器12内的逆变换器120根据驱动用伺服电动机3的动作状态(动力运行或再生),进行将直流环节4的直流电力变换成交流后向驱动用伺服电动机3侧输出的逆变换动作,或者进行将由驱动用伺服电动机3再生出的交流电力变换成直流电力后返回到直流环节4的顺变换动作,但是以下省略了关于逆变换器120的逆变换动作和顺变换动作的说明。例如,“直流环节4的直流电力在驱动用伺服电动机3中被消耗”意味着直流环节4的直流电力在被驱动用伺服放大器12内的逆变换器120变换成交流电力之后被输出到驱动用伺服电动机3侧,并在驱动用伺服电动机3中被消耗。另外,“由驱动用伺服电动机3再生出的交流电力返回到直流环节4”意味着由驱动用伺服电动机3再生出的交流电力被驱动用伺服放大器12内的逆变换器120变换成直流电力之后被输出到直流环节4侧。
在从时刻0到时刻t1的期间,驱动用伺服电动机3不进行动作。当在时刻t1驱动用伺服电动机3开始加速时,由消耗电力计算部14计算出的总消耗电力逐渐地增加。当在时刻t2由消耗电力计算部14计算出的总消耗电力超过供电开始阈值时(步骤S109),蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330输出供电用速度指令来代替基础速度指令(步骤S110)。其结果,连接有飞轮132的缓冲器用伺服电动机131逐渐地减速来产生交流的再生电力,缓冲器用伺服放大器130内的逆变换器330进行将该交流电力变换成直流电力后向直流环节4输出的顺变换动作。由此,飞轮132中蓄积的旋转能量在被变换成电能后被供给到直流环节4(步骤S111)。如上所述,将供电结束阈值设定为使供电结束阈值的绝对值比供电开始阈值的绝对值小事先实际测量出的振动最大幅度,因此即使由与基于原本的控制的动作不同的振动引起的总消耗电力存在振动(图中用A示出。),也维持飞轮型的蓄电装置13的供电动作。当由于驱动用伺服电动机3的转矩、速度降低导致总消耗电力降低且在时刻t3总消耗电力低于供电结束阈值时(步骤S113),蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330输出基础速度指令来代替供电用速度指令(步骤S114)。其结果,连接有飞轮132的缓冲器用伺服电动机131朝向基础速度逐渐地加速。当总消耗电力进一步降低且在时刻t4总消耗电力低于蓄电开始阈值时(步骤S103),蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330输出蓄电用速度指令来代替基础速度指令(步骤S104)。其结果,缓冲器用伺服电动机131的速度加速到蓄电用速度。由此,直流环节4中的直流电力被缓冲器用伺服放大器130内的逆变换器330变换成交流电力,缓冲器用伺服电动机131基于该交流电力进行旋转并在飞轮132中蓄积旋转能量(步骤S105)。当在时刻t4后驱动用伺服电动机3再次开始加速时,由消耗电力计算部14计算出的总消耗电力逐渐地增加。当在时刻t5由消耗电力计算部14计算出的总消耗电力超过蓄电结束阈值时(步骤S107),蓄电装置控制部15对缓冲器用伺服放大器130内的逆变换器330输出基础速度指令来代替蓄电用速度指令(步骤S108)。在时刻t5之后,也由蓄电装置控制部15根据由消耗电力计算部14计算出的总消耗电力控制飞轮型的蓄电装置13的蓄电和供电。
图7是例示本公开的实施方式的具有电容器型的蓄电装置的电动机驱动系统的总消耗电力与由蓄电装置控制部输出的电压指令的关系的图。在图7中,上部的波形图例示由消耗电力计算部14计算出的总消耗电力[W],虚线示出蓄电开始阈值和供电开始阈值,点划线示出蓄电结束阈值和供电结束阈值。另外,在图7中,下部的波形图示出蓄电装置控制部15输出的电压指令。在此,作为一例,如图7的上部的波形图所示那样示出通过电动机驱动系统1使驱动用伺服电动机3加速和减速而总消耗电力发生了变化的例子。驱动用伺服放大器12内的逆变换器120根据驱动用伺服电动机3的动作状态(动力运行或再生)进行将直流环节4的直流电力变换成交流后向驱动用伺服电动机3侧输出的逆变换动作,或者进行将由驱动用伺服电动机3再生出的交流电力变换成直流电力后返回到直流环节4的顺变换动作,但是与图6的情况同样地,以下省略了关于逆变换器120的逆变换动作和顺变换动作的说明。
在从时刻0到时刻t1的期间,驱动用伺服电动机3不进行动作。当在时刻t1驱动用伺服电动机3开始加速时,由消耗电力计算部14计算出的总消耗电力逐渐地增加。当在时刻t2由消耗电力计算部14计算出的总消耗电力超过供电开始阈值时(步骤S109),蓄电装置控制部15对DCDC转换器133输出供电用电压指令来代替基础电压指令(步骤S110)。其结果,连接有DCDC转换器133的电容器134的电压逐渐地降低,从而向直流环节4供给直流电力(步骤S111)。如上所述,将供电结束阈值设定为使供电结束阈值的绝对值比供电开始阈值的绝对值小事前实际测量出的振动最大幅度,因此即使由与基于原本的控制的动作不同的振动引起的总消耗电力存在振动(图中用A示出。),也维持电容器型的蓄电装置13的供电动作。当由于驱动用伺服电动机3的转矩、速度降低导致总消耗电力降低且在时刻t3总消耗电力低于供电结束阈值时(步骤S113),蓄电装置控制部15对DCDC转换器133输出基础电压指令来代替供电用电压指令(步骤S114)。其结果,连接有DCDC转换器133的电容器134的电压朝向基础电压逐渐地上升。当总消耗电力进一步降低且在时刻t4总消耗电力低于蓄电开始阈值时(步骤S103),蓄电装置控制部15对DCDC转换器133输出蓄电用电压指令来代替基础电压指令(步骤S104)。其结果,电容器134的电压向蓄电用电压逐渐地上升。由此,将直流环节4中的直流电力经由DCDC转换器133蓄积到电容器134中(步骤S105)。当在时刻t4后驱动用伺服电动机3再次开始加速时,由消耗电力计算部14计算出的总消耗电力逐渐地增加。当在时刻t5由消耗电力计算部14计算出的总消耗电力超过蓄电结束阈值时(步骤S107),蓄电装置控制部15对DCDC转换器133输出基础电压指令来代替蓄电用电压指令(步骤S108)。在时刻t5之后,也由蓄电装置控制部15根据由消耗电力计算部14计算出的总消耗电力控制电容器型的蓄电装置13的蓄电和供电。
图8是例示在以往的电动机驱动系统中以同一个蓄电用阈值探测飞轮型的蓄电装置的蓄电开始和蓄电结束、以同一个供电用阈值探测蓄电装置的供电开始和供电结束的情况下的总消耗电力与由蓄电装置控制部输出的速度指令的关系的图。在图8中,上部的波形图例示由驱动用伺服电动机、驱动用伺服放大器以及电源部消耗的电力的总和、即总消耗电力[W],虚线示出蓄电用阈值和供电用阈值。另外,在图8中,下部的波形图是将上部的波形图的A示出的由与基于原本的控制的动作不同的振动引起的总消耗电力的振动(从时刻t11到时刻t16)放大后的图。在此,作为一例,如图8的上部的波形图所示那样示出通过电动机驱动系统使驱动用伺服电动机加速和减速而总消耗电力发生了变化的例子,但是总消耗电力的行为本身与图6及图7的上部的波形图示出的行为相同。在以往的电动机驱动系统中,在从总消耗电力大于蓄电用阈值且小于供电用阈值的状态起总消耗电力逐渐地增加且超过供给用阈值的情况下,蓄电装置开始向直流环节供给直流电力,在供电动作开始后总消耗电力的值低于供给用阈值的情况下,蓄电装置结束向直流环节供给直流电力(基础恢复)。另外,在从总消耗电力大于蓄电用阈值且小于供电用阈值的状态起总消耗电力逐渐地减小且低于蓄电用阈值的情况下,蓄电装置开始进行蓄电动作以使保有能量成为基础保有能量,在蓄电动作开始后总消耗电力的值超过蓄电用阈值的情况下,蓄电装置结束蓄电动作(基础恢复)。
当驱动用伺服电动机开始加速时总消耗电力逐渐地增加且在时刻t11总消耗电力超过供电开始阈值时,蓄电装置控制部对飞轮型的蓄电装置输出供电用指令。连接有飞轮的缓冲器用伺服电动机逐渐地减速(蓄电装置的供电动作)。当由于由与基于原本的控制的动作不同的振动引起的总消耗电力的振动导致在时刻t12总消耗电力低于供电用阈值时,蓄电装置控制部对蓄电装置输出基础用指令来代替供电用指令,其结果,缓冲器用伺服电动机逐渐地加速(基础恢复),以使蓄电装置的保有能量恢复到基础保有能量。同样地,当由于总消耗电力的振动导致在时刻t13总消耗电力超过供电用阈值时,蓄电装置控制部对蓄电装置输出供电用指令来代替基础用指令,连接有飞轮的缓冲器用伺服电动机再次减速(供电动作)。像这样,当由于由与基于原本的控制的动作不同的振动引起的总消耗电力的振动导致总消耗电力超过供电用阈值时,缓冲器用伺服电动机减速,当总消耗电力低于供电用阈值时,缓冲器用伺服电动机加速。也就是说,由于由与基于原本的控制的动作不同的振动引起的总消耗电力的振动,结合有飞轮的缓冲器用伺服电动机频繁地进行加减速。其结果,对缓冲器用伺服电动机造成很大负担,容易发生故障,寿命缩短。另外,例如在电容器型的蓄电装置的情况下也会发生同样的现象。
对此,根据本公开的实施方式,蓄电装置控制部15基于不同的阈值(即,蓄电开始阈值和蓄电结束阈值)进行与蓄电装置13的蓄电有关的开始判定和结束判定,基于不同的阈值(即,供电开始阈值和供电结束阈值)进行与蓄电装置13的供电有关的开始判定和结束判定,因此如参照图6和图7说明过的那样,即使由与基于原本的控制的动作不同的振动引起的总消耗电力存在振动,也维持蓄电装置13的供电动作。因而,不会对飞轮型的蓄电装置13的缓冲器用伺服电动机131、电容器型的蓄电装置13的电容器134造成负担,能够避免蓄电装置13的故障,实现长寿命化。
上述的消耗电力计算部14、蓄电装置控制部15以及驱动用伺服电动机控制装置10例如既可以以软件程序形式构建,或者也可以以各种电子电路与软件程序的组合的形式构建。例如在以软件程序形式构建它们的情况下,通过使电动机驱动系统1内的运算处理装置按照该软件程序进行动作,能够实现上述的各部的功能。另外,或者也可以将消耗电力计算部14、蓄电装置控制部15以及驱动用伺服电动机控制装置10实现为写入有用于实现各部的功能的软件程序的半导体集成电路。
根据本公开的一个方式,在具有为了减小电源设备的电力峰而设置的蓄电装置的电动机驱动系统中,能够避免蓄电装置的故障,实现长寿命化。
Claims (8)
1.一种电动机驱动系统,具备:
电源部,其用于向直流环节供给直流电力;
驱动用伺服放大器,其用于将所述直流环节中的直流电力变换成交流电力后作为驱动电力向驱动用伺服电动机供给;
蓄电装置,其进行对于来自所述直流环节的直流电力的蓄电或者向所述直流环节的直流电力的供电;
消耗电力计算部,其用于对由所述驱动用伺服电动机、所述驱动用伺服放大器以及所述电源部消耗的电力的总和即总消耗电力进行计算;以及
蓄电装置控制部,其用于根据所述总消耗电力来控制所述蓄电装置的蓄电和供电,
其中,所述蓄电装置控制部基于不同的阈值进行与所述蓄电装置的蓄电或供电有关的开始判定和结束判定。
2.根据权利要求1所述的电动机驱动系统,其特征在于,
所述蓄电装置控制部将所述总消耗电力与预先规定的蓄电开始阈值进行比较,在比较的结果是判定为所述总消耗电力低于所述蓄电开始阈值的情况下,所述蓄电装置控制部控制所述蓄电装置来开始对于来自所述直流环节的直流电力的蓄电,
在所述蓄电装置开始蓄电后,所述蓄电装置控制部将所述总消耗电力与预先规定的蓄电结束阈值进行比较,在比较的结果是判定为所述总消耗电力超过所述蓄电结束阈值的情况下,所述蓄电装置控制部控制所述蓄电装置来结束对于来自所述直流环节的直流电力的蓄电。
3.根据权利要求2所述的电动机驱动系统,其特征在于,
所述蓄电结束阈值的绝对值小于所述蓄电开始阈值的绝对值。
4.根据权利要求1~3中的任一项所述的电动机驱动系统,其特征在于,
所述蓄电装置控制部将所述总消耗电力与预先规定的供电开始阈值进行比较,在比较的结果是判定为所述总消耗电力超过所述供电开始阈值的情况下,所述蓄电装置控制部控制所述蓄电装置来开始向所述直流环节的直流电力的供电,
在所述蓄电装置开始供电后,所述蓄电装置控制部将所述总消耗电力与预先规定的供电结束阈值进行比较,在比较的结果是判定为所述总消耗电力低于所述供电结束阈值的情况下,所述蓄电装置控制部控制所述蓄电装置来结束向所述直流环节的直流电力的供电。
5.根据权利要求4所述的电动机驱动系统,其特征在于,
所述供电结束阈值的绝对值小于所述供电开始阈值的绝对值。
6.根据权利要求1~5中的任一项所述的电动机驱动系统,其特征在于,
所述电源部是用于将从交流电源供给的交流电力变换成直流电力后向所述直流环节输出的顺变换器。
7.根据权利要求1~6中的任一项所述的电动机驱动系统,其特征在于,
所述蓄电装置具有:
飞轮,其能够蓄积旋转能量;
缓冲器用伺服电动机,其具有与所述飞轮结合的旋转轴;以及
缓冲器用伺服放大器,其在所述直流环节中的直流电力与作为所述缓冲器用伺服电动机的驱动电力或再生电力的交流电力之间进行变换。
8.根据权利要求1~6中的任一项所述的电动机驱动系统,其特征在于,
所述蓄电装置具有电容器。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018152362A JP2020028194A (ja) | 2018-08-13 | 2018-08-13 | 蓄電装置を有するモータ駆動システム |
| JP2018-152362 | 2018-08-13 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN110829471A true CN110829471A (zh) | 2020-02-21 |
Family
ID=69406345
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910746049.4A Pending CN110829471A (zh) | 2018-08-13 | 2019-08-13 | 电动机驱动系统 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20200052489A1 (zh) |
| JP (1) | JP2020028194A (zh) |
| CN (1) | CN110829471A (zh) |
| DE (1) | DE102019005518A1 (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6649418B2 (ja) * | 2018-02-26 | 2020-02-19 | ファナック株式会社 | 蓄電装置を有するモータ駆動システム |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006033562B3 (de) * | 2006-07-20 | 2008-02-28 | Schuler Pressen Gmbh & Co. Kg | Servopresse mit Energiemanagement |
| JP4339916B2 (ja) * | 2008-02-28 | 2009-10-07 | ファナック株式会社 | モータ駆動装置 |
| JP5558853B2 (ja) * | 2010-02-02 | 2014-07-23 | ファナック株式会社 | 動力線の損失を少なくとも表示または出力する機能を有する電動機制御装置 |
| JP4958052B2 (ja) * | 2010-02-24 | 2012-06-20 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 系統電力平準化装置および画像診断システム |
| JP5291763B2 (ja) * | 2011-06-24 | 2013-09-18 | ファナック株式会社 | エネルギー蓄積部を有するモータ駆動装置 |
| JP5752062B2 (ja) * | 2012-01-25 | 2015-07-22 | 三菱電機株式会社 | モータ制御装置 |
| JP6219888B2 (ja) * | 2015-07-03 | 2017-10-25 | ファナック株式会社 | Pwmコンバータを有するモータ駆動装置 |
| JP6367846B2 (ja) * | 2016-01-18 | 2018-08-01 | ファナック株式会社 | 電力ピークを低減するサーボモータ制御装置 |
-
2018
- 2018-08-13 JP JP2018152362A patent/JP2020028194A/ja active Pending
-
2019
- 2019-07-17 US US16/513,708 patent/US20200052489A1/en not_active Abandoned
- 2019-08-06 DE DE102019005518.7A patent/DE102019005518A1/de not_active Withdrawn
- 2019-08-13 CN CN201910746049.4A patent/CN110829471A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20200052489A1 (en) | 2020-02-13 |
| DE102019005518A1 (de) | 2020-03-12 |
| JP2020028194A (ja) | 2020-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109672370B (zh) | 具有蓄电装置的电动机驱动系统 | |
| CN210120505U (zh) | 电动机驱动装置和电动机驱动系统 | |
| CN109672371B (zh) | 具备多绕组缓冲用伺服电动机的电动机驱动系统 | |
| JP6496371B2 (ja) | Pwmコンバータの昇圧率が制御されるモータ駆動装置 | |
| US10965151B2 (en) | Motor drive system including power storage device | |
| CN108574446B (zh) | 伺服电动机控制装置以及伺服电动机控制系统 | |
| JP7189309B2 (ja) | 蓄電装置を有するモータ駆動装置 | |
| CN109039165B (zh) | 具有蓄电装置的异常检测部的电动机驱动系统 | |
| JP5887389B1 (ja) | 蓄電装置に接続されるモータ駆動用のpwm整流器 | |
| CN110086379B (zh) | 具有蓄电装置的电动机驱动系统 | |
| CN110829471A (zh) | 电动机驱动系统 | |
| JP7007421B2 (ja) | 蓄電装置を有するモータ駆動装置 | |
| JP7111557B2 (ja) | 蓄電装置を有するモータ駆動システム | |
| CN111193461A (zh) | 具有升压部的电动机控制装置 | |
| WO2023013068A1 (ja) | 蓄電装置を有するモータ駆動システム及び蓄電装置の制御方法 | |
| JP2019140734A (ja) | 蓄電部を有するモータ駆動システム | |
| JP2020102922A (ja) | スイッチング素子の不感帯期間を調整する不感帯期間調整装置、インバータ、電力変換システム及びモータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20200221 |