CN110809849A - 用于将连接单元安装在电动机的部件上的方法 - Google Patents
用于将连接单元安装在电动机的部件上的方法 Download PDFInfo
- Publication number
- CN110809849A CN110809849A CN201880043475.5A CN201880043475A CN110809849A CN 110809849 A CN110809849 A CN 110809849A CN 201880043475 A CN201880043475 A CN 201880043475A CN 110809849 A CN110809849 A CN 110809849A
- Authority
- CN
- China
- Prior art keywords
- winding wire
- electric motor
- positioning element
- wire end
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K15/00—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines
- H02K15/0056—Manufacturing winding connections
- H02K15/0062—Manufacturing the terminal arrangement per se; Connecting the terminals to an external circuit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
- H02K3/522—Fastening salient pole windings or connections thereto applicable to stators only for generally annular cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2203/00—Specific aspects not provided for in the other groups of this subclass relating to the windings
- H02K2203/06—Machines characterised by the wiring leads, i.e. conducting wires for connecting the winding terminations
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Windings For Motors And Generators (AREA)
- Manufacture Of Motors, Generators (AREA)
Abstract
在用于将连接单元(3)安装在电动机(1)的部件(10)上的方法中,提供电动机(1)的部件(10),部件具有多个齿(11)和布置在齿(11)上的通过绕组线区段(121)形成的线圈绕组(12),其中,绕组线区段(121)以绕组线端部(120)从线圈绕组(12)凸出。在电动机(1)的部件(10)上布置有连接单元(3),连接单元具有连接导体(31、31A、31B)的布置。将至少其中一些绕组线端部(120)与连接单元(3)的连接导体(31、31A、31B)连接。在此设置的是,为了将绕组线端部(120)与连接单元(3)的连接导体(31、31A、31B)连接,让与绕组线端部(120)作用连接的定位元件(2)和连接单元(3)沿运动平面(E)相对彼此运动,并且由此使绕组线端部(120)与连接导体(31、31A、31B)贴靠。以该方式提供用于将连接单元安装在电动机的部件上的方法,该方法能够在使用焊接方法、尤其是激光焊接方法的情况下实现线圈绕组的绕组线端部与连接单元的连接导体之间的简单的和可靠的连接。
Description
技术领域
本发明涉及一种根据权利要求1的前序部分的用于将连接单元安装在电动机的部件上的方法,以及用于制造电动机的结构组件。
背景技术
在这种方法中提供电动机的部件,部件具有多个齿和布置在齿上的通过绕组线区段形成的线圈绕组。在电动机的部件上布置有连接单元,连接单元具有连接导体的布置并且用于连接构造线圈绕组的绕组线区段的绕组线端部。
电动机的部件例如可以是定子,在定子的齿上布置有线圈绕组。为了实现无刷式的直流电机,在相对于定子可转动地支承的转子上可以例如布置有永磁磁极,永磁磁极导致激励磁场,激励磁场与通过线圈绕组产生的循环的旋转磁场相互作用,并且由此在转子上产生转矩。
连接单元用于使构造线圈绕组的绕组线区段的绕组线端部相互连接,从而各个绕组线端部相互电短路,并且因此线圈绕组可以串联地被通电。无刷式的直流电机例如可以三股式构建,其中,三条股线在运行时以换向的方式被通电,从而在定子上产生根据三相电机的方式循环的旋转磁场。
为了连接线圈绕组的绕组线端部,连接单元具有连接导体的布置。在制造电动机时,连接导体与绕组线区段的相应配属的绕组线端部连接,从而配属于共同的股线的线圈绕组通过连接单元相互短路。
常规地,为了将绕组线端部与连接导体连接例如使用硬钎焊。硬钎焊对于要与连接导体连接的绕组线端部的位置公差是比较不敏感的,这是因为在硬钎焊时,所使用的电极将待钎焊的绕组线端部压向连接导体,并且因此可以建立硬钎焊连接。
其他的连接技术、例如焊接方法、譬如激光焊接然而对于位置公差是更敏感的,并且需要的是,在建立连接时,待紧固的绕组线端部与配属的连接导体直接贴靠,从而可以建立绕组线端部与连接导体之间的可靠的接触连接。
从DE 20 2015 008 207 U1已知了一种电动机,其中,线圈绕组布置在定子上,并且通过绕组线端部与连接单元的连接导体连接。定子的线圈绕组通过连接单元以预先确定的方式相互接线。
在从WO 2016/124636 A1已知的电动机中,在定子上布置有线圈绕组(形式为各个定子线圈)。线圈绕组通过连接单元相互接线。连接单元的接触线相对于用于定子绕组的线圈端部的接线环布置,并且通过绝缘刺破触点连接。
发明内容
本发明的任务是提供用于将连接单元安装在电动机的部件上的方法和用于制造电动机的结构组件,其能够在使用焊接方法、尤其是激光焊接方法的情况下实现线圈绕组的绕组线端部与连接单元的连接导体之间的简单的和可靠的连接。
该任务通过具有权利要求1的特征的主题解决。
因此,该方法设置的是,为了将绕组线端部与连接单元的连接导体连接,让与绕组线端部作用连接的定位元件和连接单元沿运动平面相对彼此运动,并且由此绕组线端部与连接导体贴靠。
因此,定位元件用于使绕组线端部与连接导体贴靠,并且由此补偿绕组线端部与连接导体之间的可能的位置公差。如果绕组线端部与相应配属的连接导体贴靠,那么绕组线端部可以通过焊接、尤其是通过激光焊接与连接导体连接,从而提供能简单建立的、可靠的电连接,用以使绕组线端部与连接单元的连接导体接触。
由于定位元件共同作用到待连接的绕组线端部上,并且与待连接的绕组线端部作用连接,所以产生简单的制造过程。因此,绕组线端部共同与相应配属的连接导体贴靠,从而在待连接的绕组线端部上可以例如通过焊接、尤其是激光焊接来建立连接。
绕组线端部从通过绕组线区段构造的线圈绕组优选垂直于运动平面地凸出,定位元件和连接单元可以沿运动平面相对彼此运动。定位元件在此与绕组线端部作用连接,并且通过在运动平面内的运动偏转绕组线端部,从而使绕组线端部与连接导体达成接触贴靠。
在一个设计方案中设置的是,定位元件和连接单元可以围绕转动轴线相互枢转,以便使绕组线端部与相应配属的连接导体贴靠。该转动轴线垂直于运动平面地指向,并且例如可以相应于在电动机运行时电动机的转子相对于定子扭转所围绕的转动轴线。定位元件和连接单元例如与转动轴线相互同中心地布置,并且可以相互围绕转动轴线枢转。由此,使与定位元件作用连接的待连接的绕组线端部运动,并且被按压得与相应配属的连接导体贴靠。
在一个设计方案中,连接单元具有例如基体,在基体上布置有连接导体。连接导体在此例如布置在基体上的背离电动机的部件的一侧上,这需要的是,在将连接单元布置在电动机的部件上时将绕组线端部引导穿过基体中的开口。由此,绕组线端部被引导至连接导体的区域中,并且可以通过定位元件与连接导体贴靠。
开口例如可以作为长孔成形在基体上。这能够实现的是,绕组线端部以一定的间隙引导通过基体。绕组线端部通过定位元件相对于连接单元的相对运动可在长孔内运动,以便使绕组线端部与连接导体贴靠。
开口可以根据长孔的方式狭长地(在运动平面中看)在基体上延伸。但开口原则上也可以具有其他的形状、例如梯形或圆弧形。
在一个设计方案中,开口可以具有不同的开口区域,开口区域在功能上通过收窄部位彼此分离。收窄部位在此优选按如下方式定规格,即,使其净宽度小于(在横截面方面优选为圆形的)绕组线的直径,从而配属的绕组线端部只能在力作用下引导通过收窄部位。这可以用于锁定绕组线端部,并且当绕组线端部通过定位元件的作用朝连接导体的方向运动时与配属的连接导体保持贴靠。在定位元件相对于连接单元运动时,绕组线端部因此从开口区域穿过收窄部位被引入连接单元的开口的另一开口区域,其中,绕组线端部在定位元件相对于连接单元的相对运动后保留在该开口区域中,并且由此与连接导体保持贴靠。
相对于开口区域之间的收窄部位备选地,(每个)开口的不同的开口区域也可以具有不同的净宽度。第一开口区域例如可以具有如下净宽度,即,使得绕组线端部以一定的间隙被容纳,并且因此可以简单地导入第一开口区域中。与此相对,另外的第二开口区域可以具有减小的净宽度,配属的绕组线端部仅在夹紧配合的情况下才可以导入其中。开口因此从第一开口区域出发朝第二开口区域逐渐变细,其中,尤其可以设置的是,配属的绕组线端部通过定位元件相对于连接单元的相对运动从具有大的净宽度的第一开口区域进入具有更小的净宽度的第二开口区域,并且由此以夹紧配合固定在该开口中。
与第一开口区域相比,第二开口区域可以更靠近配属的连接导体的连接部位,从而当线圈绕组端部在夹紧配合的情况下布置在第二开口区域中时,线圈绕组端部更靠近连接导体的配属的连接部位,并且优选与连接部位贴靠。
第一开口区域例如可以具有圆形的横截面,而第二开口区域例如通道形地(利用相互平行延伸的开口边)从第一开口区域延伸。
定位元件的不同的设计方案是可想到的和可能的。
在一个设计方案中,在将连接单元布置在电动机的部件上之前,可以将定位元件布置在电动机的部件上。在该情况下,在绕组线端部与连接单元的配属的连接导体连接之后,定位元件优选保留在电动机的部件上。定位元件因此变为电动机的组成部分,而不会在安装后承担电动机的电动运行的功能。
在该变型方案中也得到的是,首先,将定位元件布置在电动机的部件上,例如电动机的定子上,以便随后在中间安放定位元件的情况下将连接单元布置在部件上。如果连接单元布置在电动机的部件上,那么定位元件可以相对于连接单元运动,尤其是枢转,以便将绕组线端部按压得与连接单元的连接导体贴靠,并且例如可以借助焊接、尤其是激光焊接与连接导体连接。
为了在该变型方案中将绕组线端部从电动机的部件朝连接单元引导,定位元件优选具有定位开口,在定位元件布置在电动机的部件上时,绕组线端部引导穿过定位开口。绕组线端部通过嵌入定位开口中与定位元件作用连接,从而在定位元件与连接单元之间的相对运动时,绕组线端部被按压得与连接单元的连接导体贴靠。
定位开口例如构造在定位元件的盘形的主体中。定位开口可以圆形地构造,或者例如狭长形地在主体上延伸。定位开口例如可以相对于转动轴线径向地或也相对于转动轴线切向地指向,这可以在将定位元件安置到电动机的部件上时使绕组线端部的导入和穿过变得容易。
定位开口可以具有收窄部位,这例如在之前针对连接单元的基体的开口已被描述。
在备选的变型方案中,连接单元也可以在没有中间安放定位元件的情况下布置在电动机的部件上。在该情况下,定位元件可以例如是与电动机独立的工具的组成部分,例如在绕组生产线上的工具,并且例如通过从盘形的主体凸出的按压元件被按压得与连接单元的配属的连接导体贴靠。定位元件例如又可以围绕转动轴线相对于连接单元枢转,其中,在该情况下,用于定位元件与连接单元之间的运动的转动轴线也可以相应于电动机的转子相对于定子的转动轴线。
电动机的部件(在其上构造有齿和布置在齿上的线圈绕组)例如实现电动机的定子。在该情况下,电动机可以例如构造为无刷式的直流电机,其中,转子具有永磁磁极。电动机可以三股式构建,并且相应地,连接单元可以将定子上的线圈绕组相互接线为三个以换向方式要通电的股线。
该任务也通过用于制造电动机的结构组件解决。这种结构组件包括:
-电动机的部件,部件具有多个齿和布置在齿上的通过绕组线区段形成的线圈绕组,其中,绕组线区段以绕组线端部从线圈绕组凸出,和
-连接单元,连接单元具有连接导体的布置并且要布置在电动机的部件上,其中,至少一些绕组线端部将与连接单元的连接导体连接。
此外设置了定位元件,定位元件能够被引入与绕组线端部作用连接,其中,定位元件和连接单元可以沿运动平面相对彼此运动,以便使绕组线端部与连接导体贴靠。
在之前针对方法描绘的优点和有利的设计方案也类似地应用于结构组件。
附图说明
随后应该借助在附图中示出的实施例详细阐述本发明所基于的构思。其中:
图1A示出了电动机的定子形式的部件的立体图;
图1B示出了根据图1A的定子的俯视图;
图2A示出了根据图1A的立体图,其具有布置在定子上的定位元件;
图2B示出了根据图2A的布置的俯视图;
图3A示出了根据图2A的立体图,其具有布置在定子上的连接单元;
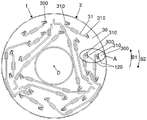
图3B示出了根据图3A的布置的俯视图;
图4A示出了定子上的连接单元的另一实施例的俯视图;
图4B示出了根据图4A的片段A中的放大视图;
图5A示出了定子上的连接单元的又一实施例的视图;
图5B示出了根据图5A的片段A中的放大视图;
图6示出了定位元件的另一实施例的视图;
图7A示出了电动机的定子形式的部件的视图;
图7B示出了根据图7A的视图,其具有布置在定子上的连接单元;
图7C示出了根据图7B的视图,其具有作用到连接单元上的绕组线端部上的定位元件;
图8示出了根据图7C的定位元件的单独的视图;
图9示出了形式为无刷式的直流电机的电动机的示意图;
图10A示出了连接单元的另一实施例的视图;并且
图10B示出了根据图10A的连接单元的俯视图。
具体实施方式
图9以示意图示出了形式为无刷式的直流电机的电动机1。
在无刷式的直流电机1中,转子13围绕转动轴线D可相对于定子10转动。转子13具有至少两个永磁磁极N、S,并且因此是永磁激励的。相反地,定子10具有多个电枢线圈a-c。
电枢线圈a-c分别具有多个绕组,其围绕定子齿缠绕,并且在根据图2的示意图中通过线圈导体a1、a2、b1、b2、c1、c2示出。
形式为无刷式的直流电机的电动机1通常具有在转子13上的2N个永磁磁极和在定子10上的三个或更多个电枢线圈a、b、c。
在电机1运行时,将电流提供到电枢线圈a-c上,以便以该方式在定子10上产生电枢磁场。在电枢线圈a-c中的电流在此利用控制装置14电子换向,从而在定子10上产生循环的电枢磁场,转子13跟随该电枢磁场,从而转子13沿转动方向围绕转动轴线D错开。
在电机1运行时通过三个相位L1、L2、L3在时间上错开地操控电枢线圈a-c,以便产生在定子20上循环的电枢磁场。在此,在无传感器的无刷式的直流电机中,例如两个相位L1-L3被通电,而第三相位L1-L3用作测量线路,并且用于检测在配属的电枢线圈a-c中感应出的反向电压。反向电压可以被评估,以便确定转子13的转子位置,并且借助转子位置调节电机1的运行。
图1A和1B示出了形式为无刷式的直流电机的电动机1的定子10的具体的实施例。定子10具有多个定子齿11(在所示的实施例中12个定子齿11),在定子齿上布置有线圈绕组12。定子齿11围绕电动机1的转动轴线D(转子13围绕该转动轴线在电动机1运行时可相对于定子10转动)分布地布置,并且在所示的实施例中分别承载形式为集中绕组的线圈绕组12。
线圈绕组12分别通过绕组线区段121缠绕,绕组线区段以绕组线端部120从相应的线圈绕组12凸出,这例如尤其是从图1A中看到。给每个线圈绕组12配属两个绕组线端部120,线圈绕组12通过绕组线端部被电联接,并且在运行时通电。
线圈绕组12的联接通过经由连接单元3的接线实现,连接单元例如在图3A和3B中示出。连接单元3具有基体30,基体环形地围绕转动轴线D延伸,并且要被安置到定子10的端侧,绕组线端部120在端侧轴向凸出。
在基体30上布置有形式为安置在基体30上的电流条的连接导体31,其用于将线圈绕组12的绕组线端部120相互电连接,从而形成用于电动机1的三相通电的三股式线圈绕组12。
如尤其是从根据图3B的俯视图看到的那样,连接导体31用于两个或三个绕组线端部120的电短路。此外存在连接导体31的三个对31A、31B、31C,其具有用于联接三个相位L1、L2、L3(参见图9)的联接部位311A、311B、311C,以便以换向方式通电三股式线圈绕组12,用以在定子10上产生旋转磁场。
在已安装的位置中,线圈绕组12的绕组线端部120在开口300处穿过连接单元3的基体30,并且因此穿过基体30延伸到基体30的背离定子10的一侧,在该侧上布置有连接导体31、31A、31B、31C(随后将连接导体31、31A、31B、31C统称为连接导体31)。在该背离定子10的一侧上,绕组线端部120分别与配属的连接导体31的联接部位310电连接,从而由此线圈绕组12以常规的方向相互接线。
为了例如可以使焊接方法、尤其是激光焊接用于连接绕组线端部120和连接导体12而需要的是,为了建立连接,绕组线端部120与配属的连接导体31的连接部位310贴靠。为此,在图1A、1B至3A、3C所示的实施例中,设置了定位元件2,定位元件在安置连接单元3之前安置在定子10上,这例如在图2A和2B中示出。
定位元件2具有盘形的由电绝缘的材料(例如塑料材料)制成的主体20,在主体中形成定位开口200,在将定位元件2安置到定子10上时,线圈绕组12的绕组线端部120引导穿过定位开口。如果定位元件2已被安置到定位10上,那么绕组线端部120延伸穿过主体20,并且轴向地从定位元件2凸出,这例如从图2A看到。
在安置定位元件2之后,如在图3A和图3B中示出的那样,在定位元件2位于定子10上的情况下,连接单元3安置到定子10上。连接单元3因此利用其基体30包绕定位元件2,并且在定子10上围嵌定位元件2,从而定位元件2至少可以在一定路线上围绕转动轴线D相对于连接单元3枢转。
在连接单元3安置到定子10上时,绕组线端部120引导穿过基体30上的形式为长孔的开口300,这例如从图3A和3B看到。绕组线端部120由此进入连接导体31的区域,并且可以与连接导体31的连接部位310连接。
为了例如在使用焊接方法、尤其是激光焊接的情况下可以建立绕组线端部120与连接导体31的配属的连接部位310之间的可靠的电连接,设置了定位元件2,定位元件通过绕组线端部120嵌入主体20上的定位开口200中与绕组线端部120作用连接,并且通过在运动平面E中围绕转动轴线D相对于连接单元3的枢转,使绕组线端部120相对于连接导体31运动,从而将绕组线端部120按压得与连接导体31的连接部位310贴靠。
尤其是在连接单元3安置到定子10上之后,定位元件2在根据图1A、1B至3A、3B的实施例中沿运动方向B1(参见图3B)相对于连接单元3枢转,从而绕组线端部120朝连接导体31的配属的连接部位310的方向运动。为此例如可以手动作用在定位元件2的操纵元件21上,该操纵元件径向地从主体20凸出并且通过连接单元3的基体30中的留空部301从外部可及。
如果绕组线端部120与连接导体31的配属的连接部位310贴靠,那么例如可以借助激光焊接建立绕组线端部120和连接导体31之间的连接,从而绕组线端部120并且由此线圈绕组12以常规的方式相互接线。
由于所有绕组线端部120共同布置在定位元件2上,并且通过定位元件2的偏转共同运动,所以绕组线端部120可以共同在一个工作步骤中与连接导体31的配属的连接部位310贴靠。随后可以以可自动化的方式针对所有绕组线端部120例如通过激光焊接建立与配属的连接导体31的可靠的、可负载的连接。
在根据图1A、1B至3A、3B的实施例中,并且还在图4A和4B中示出的实施例中,绕组线端部120以一定的间隙位于连接单元3的基体30的开口300中。这使将连接单元3安置到定子10上变得容易。通过定位元件2与连接单元3之间的相对运动,绕组线端部120于是在开关300中运动,并且由此与连接导体31的配属的连接部位310贴靠。
在此决定性的是定位元件2与连接单元3之间的相对运动。连接单元3例如可以固定在定子10上,并且使定位元件2沿运动方向B1运动。但也可能的是,定位元件2保持固定,并且连接单元3沿相反的运动方向B2(参见图4A和4B)运动。最后也可想到的并且可能的是,定位元件2和连接单元3(彼此相向)运动。
连接单元3的基体30上的开口300在图1A、1B至4A、4B所示的实施例中构造为长孔。这能够实现将连接单元3公差不敏感地安置到绕组线端部120上。在绕组线端部120之间的贴靠于是通过定位元件2与连接单元3之间的相对运动建立。
开口300也可以具有其他的形状,例如梯形或圆弧形状。
在定位元件2的盘形的主体20中的定位开口200在图2A、2B中示出的实施例中是圆形的。然而也可想到的和可能的是,定位开口200具有长孔形、梯形或圆弧形,以便使将定位元件2安置到定子10上并且使绕组线端部120引导通过定位开口200变得容易。
在图5A、5B所示的实施例中,在连接单元3的基体30上的开口300分别具有收窄部位303,收窄部位在功能上分离开口300的开口区域301、302,并且尤其是具有小于通过圆形线构造的绕组线的直径的净宽度。在定位元件2相对于连接单元3运动时,绕组线端部120可以例如从开口区域302穿过收窄部位303运动到另一开口区域301中,以便以该方式与配属的连接导体31的连接部位310贴靠。绕组线端部120借助收窄部位303锁定在开口区域301中,并且因此无法自动运动到与连接部位310脱离贴靠。
每个开口300可以具有一个或多个收窄部位303,用于使多个开口区域301、302彼此分离。
在定位元件2的主体20上的定位开口200同样可以具有收窄部位,以便由此实现绕组线端部120在特定的位置中的锁定。
在连接单元3的另外的在图10A、10B中示出的实施例中,开口300具有不同的开口区域301、302,开口区域在其净宽度方面有所不同。
因此,在该实施例中,每个开口300具有一个第一开口区域302,第一开口区域与配属的连接导体31的配属的连接部位310远离,并且具备带有比较大的净宽度的圆形横截面。圆形的开口区域302在此大到使得配属的绕组线端部120可以在一定的间隙中导入开口区域302中。
第二开口区域301相应联接至第一开口区域302,第二开口区域从第一开口区域302朝配属的连接导体31的配属的连接部位310指向,并且通道形地从第一开口区域302延伸。与第一开口区域302相比,第二开口区域301具有减小的净宽度,该净宽度小到使得配属的绕组线端部120在运动到第二开口区域301中时占据第二开口区域301中的夹紧配合,并且因此在夹紧配合的情况下与连接导体31的配属的连接部位310贴靠。
通过连接单元3相对于配属的定位元件2的相对运动,每个绕组线端部120又在相应配属的开口300内运动,并且由此从第一开口区域302进入相应的开口300的第二开口区域301,并且因此与配属的连接导体31的连接部位310贴靠。
图6示出了定位元件2的实施例,定位元件具有形式为狭长形延伸的、相对于转动轴线D径向指向的开口的定位开口200。定位开口200朝边缘打开,这可以使绕组线端部120的导入变得容易。
定位开口200可以狭长形地相对于转动轴线D径向或切向地延伸。但定位开口200也可以具有其他的形状、例如圆形、梯形或圆弧形。
定位元件2和连接单元3的前述的不同的实施例可以以任意的方式相互组合。对于根据图1A、1B至6的实施例来说在此共同的是,定位元件2在连接单元3之前安置到定子10上,并且在随后安置连接单元3之后被连接单元3的基体30包绕。在建立绕组线端部120与连接导体31之间的连接后,定位元件2保持在定子10与连接单元3之间的中间位置中,并且因此变为电动机1的组成部分,然而不承担电动机1的电动运行的重要功能。
在图7A至7C和8所示的实施例中,连接单元3在定位元件2之前安置到定子10上,这一点例如在图7A和7B的顺序中看到。定子10的线圈绕组12的绕组线端部120又引导通过连接单元3的基体30,并且在连接单元3安置到定子10上之后穿过基体30中的开口300。
为了将绕组线端部120按压得与连接导体31的配属的连接部位310贴靠以用于建立绕组线端部120与绕组线端部120的连接导体31之间的连接,定位元件2如从图8可看到的那样具有按压元件202,按压元件从定位元件2的环形的主体20轴向凸出,并且通过形式为沿(围绕转动轴线D指向的)周边方向凸出的凸鼻的端部区段203作用到绕组线端部120上。每个端部区段203在此在定位元件2和连接单元3相对彼此运动时与绕组线端部120贴靠,并且将绕组线端部压向配属的连接部位310。用于激光焊接的激光射束随后可以通过环形的主体20中的开口201对准连接部位310,以便建立相应的绕组线端部120与连接部位310之间的焊接连接。
在根据图7A至7C和8的实施例中,要么定位元件2又可以沿运动方向B2,要么连接单元3又可以沿相反的运动方向B1运动。也可想到的和可能的是,定位元件2和连接单元3彼此相向运动。
在根据7A至7C和8的实施例中,定位元件2没有变为电动机1的组成部分,而是可以在建立连接后从连接单元3取下。在该情况下,定位元件2可以例如是绕组生产线的组成部分,在绕组生产线中,首先通过适当的缠绕机组将线圈绕组12安放在定子10上,随后将连接单元3安置到定子10上,并且在使用定位元件2的情况下与绕组线端部120连接。
这种与电动机1分开使用的定位元件2可以和例如根据图4A、4B、图5A、5B和根据图10A、10B的连接单元3的所有实施例一起使用。
本发明所基于的构思并不局限于前述的实施例,而是可以原则上也以完全不同的类型的方式实现。
尤其是也可以通过定位元件例如在转子上建立绕组接线。
电动机不是强制性地构造为无刷式的直流电机,而是也可以具有其他的马达结构形式。
附图标记列表
1 电动机
10 马达部件(定子)
11 定子齿
12 线圈绕组
120 绕组线端部
121 绕组线区段
13 转子
14 控制装置
2 定位元件
20 盘形主体
200 定位开口
201 开口
202 按压元件
203 端部区段
21 操纵元件
3 连接单元
30 基体
300 开口
301、302 开口区域
303 收窄部位
304 留空部
31、31A-31C 连接导体(导体迹线)
310 连接部位(导体迹线端部)
311A、311B、311C 联接部位
a、b、c 电枢线圈
a1、a2、b1、b2、c1、c2 线圈导体
B1、B2 运动方向
D 转动轴线
E 运动平面
L1、L2、L3 相位
Claims (16)
1.一种用于将连接单元(3)安装在电动机(1)的部件(10)上的方法,具有如下步骤:
-提供电动机(1)的部件(10),所述部件具有多个齿(11)和布置在齿(11)上的通过绕组线区段(121)形成的线圈绕组(12),其中,所述绕组线区段(121)以绕组线端部(120)从线圈绕组(12)凸出,
-在电动机(1)的部件(10)上布置连接单元(3),所述连接单元具有连接导体(31、31A、31B)的布置,并且
-将至少其中一些绕组线端部(120)与连接单元(3)的连接导体(31、31A、31B)连接,
其特征在于,为了将所述绕组线端部(120)与所述连接单元(3)的连接导体(31、31A、31B)连接,让与绕组线端部(120)作用连接的定位元件(2)和连接单元(3)沿运动平面(E)相对彼此运动,并且由此使所述绕组线端部(120)与连接导体(31、31A、31B)贴靠。
2.根据权利要求1所述的方法,其特征在于,在通过定位元件(2)和连接单元(3)相对彼此的运动使绕组线端部(120)与连接导体(31、31A、31B)贴靠之后,所述绕组线端部(120)通过焊接与连接导体(31、31A、31B)连接。
3.根据权利要求1或2所述的方法,其特征在于,所述绕组线端部(120)垂直于运动平面(E)地从线圈绕组(12)凸出,并且通过定位元件(2)和连接单元(3)相对彼此沿运动平面(E)的运动而运动。
4.根据权利要求1至3中任一项所述的方法,其特征在于,为了将绕组线端部(120)与连接单元(3)的连接导体(31、31A、31B)连接,让定位元件(2)和连接单元(3)围绕垂直于运动平面(E)指向的转动轴线(D)相对彼此枢转。
5.根据前述权利要求中任一项所述的方法,其特征在于,在将连接单元(3)布置在电动机(1)的部件(10)上时,将绕组线端部(120)引导通过连接单元(3)的基体(30)中的开口(300),以便在基体(30)的背离电动机(1)的部件(10)的一侧上与连接导体(31、31A、31B)连接。
6.根据权利要求5所述的方法,其特征在于,所述开口(300)狭长地在基体(30)上延伸。
7.根据权利要求5或6所述的方法,其特征在于,所述开口(300)分别具有布置在两个开口区域(301、302)之间的收窄部位(303),其中,通过定位元件(2)和连接单元(3)相对彼此的运动,使绕组线端部(120)分别从其中一个开口区域(301、302)运动到另一开口区域(302、301)中。
8.根据权利要求5至7中任一项所述的方法,其特征在于,所述开口(300)各具有两个开口区域(301、302),所述两个开口区域在其净宽度方面有所不同,其中,通过定位元件(2)和连接单元(3)相对彼此的运动,绕组线端部(120)分别从具有更大的净宽度的第一开口区域(302)运动到具有更小的净宽度的第二开口区域(301)中。
9.根据前述权利要求中任一项所述的方法,其特征在于,在将所述连接单元(3)布置在电动机(1)的部件(10)上之前,将所述定位元件(2)布置在电动机(1)的部件(10)上。
10.根据前述权利要求中任一项所述的方法,其特征在于,在将定位元件(2)布置在电动机(1)的部件(10)上时,将绕组线端部(120)引导通过定位元件(2)的主体(20)中的定位开口(200)。
11.根据权利要求10所述的方法,其特征在于,所述主体(20)盘形地沿运动平面(E)延伸。
12.根据权利要求10或11所述的方法,其特征在于,所述定位开口(200)狭长地在主体(20)上延伸。
13.根据权利要求10至12中任一项所述的方法,其特征在于,所述定位元件(2)通过向从主体(20)凸出的操纵区段(21)的作用相对于连接单元(3)运动。
14.根据权利要求1至8中任一项所述的方法,其特征在于,所述定位元件(2)是与电动机(1)独立的工具的组成部分,并且具有按压元件(202),所述按压元件通过定位元件(2)和连接单元(3)相对彼此的运动作用到绕组线端部(120)上,并且将所述绕组线端部按压得与连接导体(31、31A、31B)贴靠。
15.根据前述权利要求中任一项所述的方法,其特征在于,所述部件(10)通过电动机(1)的定子构造。
16.一种用于制造电动机(1)的结构组件,所述结构组件具有:
-电动机(1)的部件(10),所述部件具有多个齿(11)和布置在齿(11)上的通过绕组线区段(121)形成的线圈绕组(12),其中,所述绕组线区段(121)以绕组线端部(120)从线圈绕组(12)凸出,和
-连接单元(3),所述连接单元具有连接导体(31、31A、31B)的布置,并且要布置在电动机(1)的部件(10)上,其中,至少其中一些绕组线端部(120)能与连接单元(3)的连接导体(31、31A、31B)连接,
其特征在于具有能够实现与绕组线端部(120)作用连接的定位元件(2),其中,所述定位元件(2)和连接单元(3)能沿运动平面(E)相对彼此运动,以便使所述绕组线端部(120)与连接导体(31、31A、31B)贴靠。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017212995.6A DE102017212995A1 (de) | 2017-07-27 | 2017-07-27 | Verfahren zum Montieren einer Schalteinheit an einer Komponente eines Elektromotors |
| DE102017212995.6 | 2017-07-27 | ||
| PCT/EP2018/070098 WO2019020659A1 (de) | 2017-07-27 | 2018-07-25 | Verfahren zum montieren einer schalteinheit an einer komponente eines elektromotors |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110809849A true CN110809849A (zh) | 2020-02-18 |
| CN110809849B CN110809849B (zh) | 2022-04-26 |
Family
ID=63036050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880043475.5A Active CN110809849B (zh) | 2017-07-27 | 2018-07-25 | 用于将连接单元安装在电动机的部件上的方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11689085B2 (zh) |
| CN (1) | CN110809849B (zh) |
| DE (1) | DE102017212995A1 (zh) |
| WO (1) | WO2019020659A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111900816A (zh) * | 2020-08-17 | 2020-11-06 | 华中科技大学 | 一种散线绕组电机 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018217558A1 (de) * | 2018-10-12 | 2020-04-16 | Continental Automotive Gmbh | Elektroantrieb, Bremsvorrichtung und Fahrzeug |
| DE102019215679A1 (de) * | 2019-10-11 | 2021-04-15 | Brose Fahrzeugteile SE & Co. Kommanditgesellschaft, Würzburg | Kontaktvorrichtung eines Stators |
| DE102021129198B3 (de) * | 2021-11-10 | 2023-02-02 | Bayerische Motoren Werke Aktiengesellschaft | Rotor mit verschaltbaren Spuleneinheiten, elektrische Antriebsmaschine sowie Kraftfahrzeug |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1808851A (zh) * | 2004-12-28 | 2006-07-26 | 株式会社日立制作所 | 电动动力转向用电动机及其制造方法 |
| CN102088219A (zh) * | 2009-12-03 | 2011-06-08 | 现代自动车株式会社 | 车辆用集中绕组型驱动电机 |
| CN102738970A (zh) * | 2011-04-15 | 2012-10-17 | 阿斯莫有限公司 | 汇流排装置、定子、电动机及定子的制造方法 |
| CN102801225A (zh) * | 2011-05-26 | 2012-11-28 | 阿斯莫有限公司 | 电动机芯、定子、以及定子的制造方法 |
| CN102891543A (zh) * | 2011-07-21 | 2013-01-23 | 本田技研工业株式会社 | 旋转电机的定子及其制造方法 |
| WO2017026491A1 (ja) * | 2015-08-10 | 2017-02-16 | 日本電産株式会社 | モータ |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3613262B2 (ja) * | 2002-04-26 | 2005-01-26 | 三菱電機株式会社 | 回転電機およびその製造方法 |
| WO2012029706A1 (ja) * | 2010-08-30 | 2012-03-08 | 三菱電機株式会社 | インバータ一体型駆動モジュール |
| JP5930801B2 (ja) * | 2012-03-30 | 2016-06-08 | 日立オートモティブシステムズ株式会社 | 車載用モータ、及びそれを用いた電動パワーステアリング装置 |
| DE102012020329A1 (de) * | 2012-10-17 | 2014-04-17 | Sew-Eurodrive Gmbh & Co Kg | Elektromotor und Verfahren zum Herstellen eines Elektromotors |
| DE102013113363A1 (de) * | 2013-12-03 | 2015-06-03 | Pierburg Gmbh | Stator für einen elektronisch kommutierten Gleichstrommotor |
| DE102013021057B4 (de) | 2013-12-18 | 2017-06-08 | Grammer Ag | Druckminderer |
| JP6232449B2 (ja) * | 2013-12-18 | 2017-11-15 | 日立オートモティブシステムズ株式会社 | 回転電機 |
| DE202015008207U1 (de) | 2015-01-30 | 2016-01-18 | Brose Fahrzeugteile GmbH & Co. Kommanditgesellschaft, Würzburg | Stator eines Elektromotors sowie Schalteinheit hierfür |
| KR101943478B1 (ko) | 2015-02-03 | 2019-01-29 | 브로제 파르초이크타일레 게엠베하 운트 코. 콤만디트게젤샤프트 뷔르츠부르크 | 전기 모터 및 그에 대한 스위칭 유닛 |
-
2017
- 2017-07-27 DE DE102017212995.6A patent/DE102017212995A1/de active Pending
-
2018
- 2018-07-25 CN CN201880043475.5A patent/CN110809849B/zh active Active
- 2018-07-25 WO PCT/EP2018/070098 patent/WO2019020659A1/de active Application Filing
- 2018-07-25 US US16/634,447 patent/US11689085B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1808851A (zh) * | 2004-12-28 | 2006-07-26 | 株式会社日立制作所 | 电动动力转向用电动机及其制造方法 |
| CN102088219A (zh) * | 2009-12-03 | 2011-06-08 | 现代自动车株式会社 | 车辆用集中绕组型驱动电机 |
| CN102738970A (zh) * | 2011-04-15 | 2012-10-17 | 阿斯莫有限公司 | 汇流排装置、定子、电动机及定子的制造方法 |
| CN102801225A (zh) * | 2011-05-26 | 2012-11-28 | 阿斯莫有限公司 | 电动机芯、定子、以及定子的制造方法 |
| CN102891543A (zh) * | 2011-07-21 | 2013-01-23 | 本田技研工业株式会社 | 旋转电机的定子及其制造方法 |
| WO2017026491A1 (ja) * | 2015-08-10 | 2017-02-16 | 日本電産株式会社 | モータ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111900816A (zh) * | 2020-08-17 | 2020-11-06 | 华中科技大学 | 一种散线绕组电机 |
| CN111900816B (zh) * | 2020-08-17 | 2021-10-08 | 华中科技大学 | 一种散线绕组电机 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210091643A1 (en) | 2021-03-25 |
| CN110809849B (zh) | 2022-04-26 |
| WO2019020659A1 (de) | 2019-01-31 |
| US11689085B2 (en) | 2023-06-27 |
| DE102017212995A1 (de) | 2019-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110809849B (zh) | 用于将连接单元安装在电动机的部件上的方法 | |
| US8143752B2 (en) | Electric motor having electrical connecting elements for connection to winding leads | |
| US8035263B2 (en) | Electric motor | |
| US20230098997A1 (en) | Stator with a contact apparatus | |
| KR101687157B1 (ko) | 전기 모터용 고정자 시스템 | |
| US6707186B2 (en) | Stator for an electric machine | |
| US7936099B2 (en) | Electric motor stator | |
| US8584346B2 (en) | Method for producing a bar winding for the stator of an electric machine | |
| EP3552303A1 (de) | Stator einer elektrischen maschine, elektrische maschine sowie verlege- und kontakteinrichtung für eine elektrische maschine | |
| JP2016511625A (ja) | 自動車部品用の電気モータ | |
| US7514828B2 (en) | Stator for an electrical machine | |
| US7247962B2 (en) | Stator assembly | |
| JP5476005B2 (ja) | モータ | |
| CN112425041B (zh) | 具有接线单元的电机和用于制造具有接线单元的电机的方法 | |
| KR102430382B1 (ko) | 모터 | |
| CN111247717A (zh) | 具有接线端盘的电动机用定子装置以及定子装置的用途 | |
| CN112425043B (zh) | 具有接线单元的电机和用于制造具有接线单元的电机的方法 | |
| CN110622397B (zh) | 同步电动机以及这种电动机的组装方法 | |
| US20230402899A1 (en) | Work machine | |
| US20180226866A1 (en) | Motor and manufacturing method thereof | |
| US11996750B2 (en) | Electrical contacting of stator terminals on a printed circuit board using horizontally aligned insulation displacement contacts | |
| JPH0937494A (ja) | 三相交流回転電機の電機子巻線構造 | |
| CN112425042A (zh) | 具有接线单元的电机和用于制造具有接线单元的电机的方法 | |
| JPH10336941A (ja) | モータ | |
| KR100652177B1 (ko) | 회전전기의 통전기판 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |