CN110112953B - 马达和包括马达的电子设备 - Google Patents
马达和包括马达的电子设备 Download PDFInfo
- Publication number
- CN110112953B CN110112953B CN201910354438.2A CN201910354438A CN110112953B CN 110112953 B CN110112953 B CN 110112953B CN 201910354438 A CN201910354438 A CN 201910354438A CN 110112953 B CN110112953 B CN 110112953B
- Authority
- CN
- China
- Prior art keywords
- vibrator
- pressing
- rolling
- motor according
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003825 pressing Methods 0.000 claims abstract description 76
- 230000008878 coupling Effects 0.000 claims abstract description 28
- 238000010168 coupling process Methods 0.000 claims abstract description 28
- 238000005859 coupling reaction Methods 0.000 claims abstract description 28
- 230000005540 biological transmission Effects 0.000 claims abstract description 19
- 238000005096 rolling process Methods 0.000 claims description 21
- 230000007246 mechanism Effects 0.000 claims description 19
- 238000002360 preparation method Methods 0.000 claims 1
- CNQCVBJFEGMYDW-UHFFFAOYSA-N lawrencium atom Chemical compound [Lr] CNQCVBJFEGMYDW-UHFFFAOYSA-N 0.000 description 7
- 230000003287 optical effect Effects 0.000 description 6
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/003—Alignment of optical elements
- G02B7/005—Motorised alignment
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/023—Mountings, adjusting means, or light-tight connections, for optical elements for lenses permitting adjustment
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
- H02N2/006—Elastic elements, e.g. springs
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/04—Constructional details
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Lens Barrels (AREA)
- Motor Or Generator Frames (AREA)
Abstract
马达和包括马达的电子设备。马达包括:振子;多个加压构件,其将所述振子压到与所述振子接触的接触构件上;传递构件,其将由多个所述加压构件施加的加压力传递至所述振子;第一保持构件,其保持所述振子;第二保持构件,其保持所述传递构件;以及联结构件,其将所述第一保持构件和所述第二保持构件联结起来。所述振子和所述接触构件通过所述振子发生的振动相对移动。所述振子包括设置于与所述传递构件所在侧的表面相反的表面的突出部。多个所述加压构件被分开地配置成包围所述突出部。所述联结构件配置在比多个所述加压构件靠近所述突出部的位置。
Description
本申请是申请日为2017年4月28日、申请号为201710293705.0、发明名称为马达和包括马达的电子设备的申请的分案申请。
技术领域
本发明涉及包括振子的马达。
背景技术
已知一种振动波马达(超声波马达),其被构造为通过将振子压到滑动构件上来相对驱动滑动构件,其中,振子在施加了高频电压时周期性地振动。日本特开2015-126692号公报公开的超声波马达包括:振子;摩擦构件;加压机构,其将振子压到摩擦构件上;和如下机构,该机构被设置成能够在用于固定振子的基座与用于保持基座的振子支撑构件之间无任何驱动方向上的松动(backlash)的情况下在加压方向上移动。因此,日本特开2015-126692号公报公开的超声波马达能够在无任何驱动方向上的松动的情况下保持振子并且能够改善振子支撑构件的进给精度。
然而,在日本特开2015-126692号公报中,用于将振子压到摩擦构件上的加压机构在加压方向上堆叠,因此超声波马达在厚度方向上大型化。被设置成能够在无任何驱动方向上的松动的情况下在加压方向上移动的机构的驱动方向上的尺寸也大型化。结果,难以在设置有加压机构和被设置成能够在无任何驱动方向上的松动的情况下在加压方向上移动的机构的同时使超声波马达单元小型化。
发明内容
鉴于该问题,本发明的目的是提供一种马达,其能够在设置有将振子压到接触构件上的加压机构和被设置成能够在无任何驱动方向上的松动的情况下在加压方向上移动的机构的同时小型化。
根据本发明的一方面的马达包括:振子;多个加压构件,其将所述振子压到与所述振子接触的接触构件上;传递构件,其将由多个所述加压构件施加的加压力传递至所述振子;第一保持构件,其保持所述振子;第二保持构件,其保持所述传递构件;以及联结构件,其将所述第一保持构件和所述第二保持构件联结起来。所述振子和所述接触构件通过所述振子发生的振动相对移动。所述振子包括设置于与所述传递构件所在侧的表面相反的表面的突出部。多个所述加压构件被分开地配置成包围所述突出部。所述联结构件配置在比多个所述加压构件靠近所述突出部的位置。
本发明还提供一种电子设备,其包括根据本发明的一方面的马达。
根据本发明的另一方面的马达,其通过使振子振动而使得所述振子和与所述振子接触的接触构件能够相对移动。所述马达包括:加压机构,其包括多个弹性构件和传递构件并且将所述振子压到所述接触构件上,其中,所述传递构件将由多个所述弹性构件产生的力传递至所述振子;第一构件,其保持所述振子;第二构件,其保持所述加压机构;以及联结构件,其将所述第一构件和所述第二构件联结起来。所述联结构件包括使得所述第一构件和所述第二构件在所述加压机构的加压方向上相对移动的滚动构件。在与所述加压方向正交的平面内,多个所述弹性构件配置在所述振子的周围。在所述振子和所述接触构件的相对移动方向以及与所述加压方向和所述相对移动方向均正交的方向中的至少一个方向上,所述滚动构件配置在比多个所述弹性构件靠近所述振子的位置。
本发明还提供一种电子设备,其包括根据本发明的另一方面的马达。
通过下面参照附图对示例性实施方式的说明,本发明的其它特征将变得明显。
附图说明
图1是根据本发明的实施方式的包括超声波马达的电子设备的主要部件的截面图。
图2是根据第一实施方式的超声波马达的立体图。
图3是根据第一实施方式的超声波马达的分解立体图。
图4是根据第一实施方式的超声波马达的主要部件的截面图。
图5是根据第一实施方式的超声波马达的俯视图。
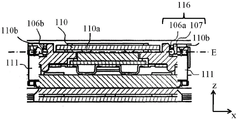
图6是沿着图5的D-D截取的截面图。
图7是根据第二实施方式的超声波马达的主要部件的放大图。
具体实施方式
现在参考附图,将详细说明本发明的实施方式。将用相同的附图标记表示各图中相对应的元件,并且将省略其重复说明。
图1是作为包括超声波马达1的电子设备的一个示例的镜筒的主要部件的截面图,该超声波马达1为根据本发明的实施方式的振动波马达。由于镜筒为近似旋转对称,所以图1只示出了镜筒的上半部。另外,图1示出了可拆装地安装至摄像设备的镜筒,该镜筒为包括作为根据本发明的实施方式的振动波马达的超声波马达1的电子设备的一个示例,而将与镜筒集成为一体的摄像设备看作电子设备的另一个示例。
镜筒3通过安装座5可拆装地安装至照相机主体(摄像设备)2,在照相机主体2内设置有摄像元件4。保持透镜G1的前镜筒7和保持透镜G3的后镜筒8固定至镜筒3的固定筒6。透镜保持架9保持透镜G2并且被由前镜筒7和后镜筒8保持的引导杆10以能够直线移动的方式保持。在超声波马达1的基板115上形成有待利用螺钉固定至后镜筒8的凸缘部(未示出)。
当驱动包括超声波马达1的振子保持构件102的移动部时,超声波马达1的驱动力通过振子保持构件102传递到透镜保持架9,由此使透镜保持架9通过引导杆10与光轴O(x轴)平行地直线移动。
在本实施方式中,超声波马达1安装于作为电子设备的镜筒3,镜筒3为电子设备,但本发明不限于此。超声波马达1可以安装于与镜筒和摄像设备不同的电子设备。另外,超声波马达1用于使透镜与光轴O平行地移动,但可以用于使模糊校正透镜(blur correctionlens)在与光轴O正交的方向上移动。
第一实施方式
图2至图5分别是根据本实施方式的超声波马达1的立体图、分解立体图、主要部件的截面图以及俯视图。
利用螺钉将摩擦构件(接触构件)104和引导支撑构件113固定至基板115。四个加压弹簧(加压构件)111均通过联结保持部联结到加压力传递构件(传递构件)110和驱动力传递构件112,其中,加压力传递构件110和驱动力传递构件112均具有联接保持部。在加压力传递构件110和驱动力传递构件112之间产生拉伸弹簧力,并且在如箭头A所示的方向上拉加压力传递构件110。因此,用于将振子100压到摩擦构件104上的加压机构包括:加压弹簧111、加压力传递构件110和驱动力传递构件112。加压力传递构件110包括形成为大致半球状突出部的加压部110a,以及为了防止损坏压电元件103而配置在压电元件103和加压部110a之间的弹性构件109,使得压电元件103和加压部110a彼此不直接接触。加压弹簧111通过这些构件在如箭头A所示的方向上对振子100加压。当加压弹簧111对振子100加压时,压力接触部100a与摩擦构件104摩擦接触,其中,压力接触部100a是形成于与振子100的加压力传递构件110所在侧的表面相反的表面的突出部。在本实施方式中,加压弹簧111在四个位置对振子100加压,但本发明不限于此,只要多个加压构件能够在不同的位置对振子100加压即可。另外,在本实施方式中,将弹簧用作加压构件,但本发明不限于此,只要振子100能够被压到摩擦构件104上即可。
振子100包括振动板101和通过粘接剂粘接到振动板101的压电元件103。使用焊接或者粘接剂将振动板101固定到振子保持构件102。压电元件103通过被施加高频电压而激发超声波振动。当粘接到振动板101的压电元件103激发超声波振动时,振子100发生共振现象。即,振子100通过被施加高频电压产生超声波振动。结果,在形成于振子100的压力接触部100a的端部发生近似的椭圆振动。
改变施加于压电元件103的高频电压的频率和相位能够适当地改变转动方向和改变椭圆比,并且因此能够产生期望的振动。因此,将振子100压到摩擦构件104上产生用于使振子100和摩擦构件104相对移动的驱动力,因此振子100能够相对于摩擦构件104沿着x轴(光轴O)移动。振子100的相对移动方向与加压弹簧111加压的加压方向正交。
包括辊(滚动构件)106a、106b和具有预定的弹性的板簧(施力构件)107的联结构件116整合在振子保持构件102和用于保持加压力传递构件110的保持壳体105之间。辊106a被以能够在如箭头A所示的方向(加压弹簧111的加压方向)上移动的方式夹在板簧107和振子保持构件102之间。板簧107配置在保持壳体105和辊106a之间,并且具有平行于x轴的施力。即,板簧107通过辊106a在如箭头B所示的方向上对振子保持构件102施力,并且在如箭头C所示的方向上对保持壳体105施力。由此,辊106b被夹在振子保持构件102和保持壳体105之间。在辊106a和106b中,受到板簧107施力的辊106a可以比不受板簧107施力的辊106b大。
利用该结构,联结构件116使得在平行于x轴的方向(振子100的移动方向)上无松动,并且通过辊106a和106b的作用抑制在如箭头A所示的方向(加压弹簧111的加压方向)上的滑动阻力。
另外,板簧107的施力设定为比通过开始和停止保持壳体105和从动部分的驱动而产生的加速和减速的惯性力大。由此,在振子100、振子保持构件102和保持壳体105中不会产生由于驱动期间的惯性力造成的沿着振子100的移动方向的相对位移,因此能够实现稳定的驱动控制。
在本实施方式中,在联结构件116中包括被用作滚动构件的辊106a和106b,但本发明不限于此,只要联结构件116能够在如箭头A所示的方向上移动即可。例如,可以使用球代替辊。另外,在本示例中,板簧107被用作包括在联结构件116中的施力构件,但本发明不限于此,只要在振子保持构件102和保持壳体105之间不产生松动即可。
驱动力传递构件112通过粘接剂或者螺纹接合固定到保持壳体105,并传递振子100中产生的驱动力。在驱动力传递构件112上,形成供滚动球(引导构件)114a至114c插入的三个V槽(移动侧引导部),以沿着x轴(光轴O)引导保持壳体105。引导支撑构件113配置在摩擦构件104的下方。摩擦构件104和引导支撑构件113利用螺钉固定到基板115。在引导支撑构件113上形成有三个槽状的固定侧引导部。滚动球114a至114c均被夹在形成于驱动力传递构件112的移动侧引导部和形成于引导支撑构件113的固定侧引导部之间。通过这些构件,以能够沿着x轴(光轴O)向前或者向后移动的方式支撑保持壳体105。在本实施方式中,在三个形成于引导支撑构件113的固定侧引导部中,两个是V槽、一个是有底的平面槽,但这三个固定侧引导部可以是能够供滚动球114滚动的槽。
在本实施方式中,为了使超声波马达1在z轴方向上薄,将加压弹簧111分开地配置成包围振子100,而不是被堆叠在振子100的上部。在本实施方式中,通过多个加压弹簧111产生加压力能够使加压弹簧111小型化。另外,振子100优选均匀地压在摩擦构件104上。在本实施方式中,如图5所示,当从相对于X-Y平面的上方观察超声波马达1时,加压弹簧111分开地配置成包围振子100的压力接触部100a。
联结构件(辊106a、106b和板簧107)116在平行于x轴的方向(振子100的移动方向)上和在平行于y轴的方向上配置在加压弹簧111之间(在比加压弹簧111靠近压力接触部100a的位置处)。即,加压弹簧111在平行于x轴和y轴的方向上以围绕振子100的方式配置在联结构件116的外侧。平行于y轴的方向是与振子100的振动方向以及加压弹簧111的加压方向两者都正交的方向。但是,该平行于y轴的方向不必须严格地正交于上述方向,即使当偏离几度时也被当做实质上正交于上述方向。
图6是沿着图5的D-D截取的截面图。在平行于z轴的方向上,加压力传递构件110的联结和保持加压弹簧111的联结保持部110b、加压力传递构件110的加压部110a和联结构件116配置在图中的点划线E上的相同位置处。这些部件不必严格地配置在相同的位置,即使当偏离几毫米时也被视为实质上配置在相同的位置。由于包括在联结构件116中的辊106a、106b和板簧107上的加压,所以在振子100被加压的方向(如箭头A所示的方向)上将这些构件设置在点划线E上没有坏的影响。因此,抑制了振子100的在移动方向上的倾斜,从而能够实现驱动性能的稳定化。
在本实施方式中,在加压弹簧111为拉伸弹簧的情况下,加压机构还可以包括分别保持各拉伸弹簧的第一端的弹簧保持构件,并且联结保持部110b可以用作为保持各拉伸弹簧的第二端的保持构件。
利用这种结构,在设置将振子压到摩擦构件上的加压机构和被设置成在无任何驱动方向上的松动的情况下能够在加压方向上移动的机构的同时,能够使根据本实施方式的超声波马达1小型化。
在本实施方式中,联结构件116在平行于x轴的方向上和在平行于y轴的方向上配置在加压弹簧111之间,但可以只在平行于x轴的方向上配置在加压弹簧111之间,或者可以只在平行于y轴的方向上配置在加压弹簧111之间。利用任一结构都能够获得小型化的效果。
第二实施方式
图7是根据本实施方式的超声波马达1的主要部件的放大图。在本实施方式中,使用相同的附图标记表示与第一实施方式相同的构件,并且使用新的附图标记表示与第一实施方式中不同的构件。
联结构件216包括辊(滚动构件)206和板簧(施力构件)207。辊206的在平行于y轴的方向(纵向)上的长度比第一实施方式中的辊106a的在平行于y轴的方向(纵向)上的长度长。对辊206施力的板簧207的在平行于y轴的方向(纵向)上的长度比第一实施方式中的板簧107的在平行于y轴的方向(纵向)上的长度长。延长板簧207的在纵向上的长度能够减小板簧207的设计难度。
另外,包括辊206和板簧207的联结构件216在平行于y轴的方向(纵向)上与加压力传递构件110接触。即,在第一实施方式中保持壳体105使联结构件116在纵向上定位,但在本实施方式中加压力传递构件110使联结构件216在纵向上定位。
在各个实施方式中,超声波马达1具有振子100移动而摩擦构件104不移动的结构,但超声波马达1可以具有振子100不移动而摩擦构件104移动的结构。
另外,超声波马达1包括作为不移动的固定构件的摩擦构件104,但在振子100与除了超声波马达1之外的构件(例如,透镜保持架的一部分)摩擦接触的情况下,超声波马达1可以不包括摩擦构件104。
虽然已经参照示例性实施方式说明了本发明,但是应当理解,本发明不限于所公开的示例性实施方式。权利要求书的范围应符合最宽泛的解释,以包含所有的这些变型、等同结构和功能。
Claims (10)
1.一种马达,其通过使振子振动而使得所述振子和与所述振子接触的接触构件能够相对移动,所述马达包括:
加压机构,其包括多个弹性构件和传递构件并且将所述振子压到所述接触构件上,其中,所述传递构件将由多个所述弹性构件产生的力传递至所述振子;
第一构件,其保持所述振子;
第二构件,其保持所述加压机构;以及
联结构件,其将所述第一构件和所述第二构件联结起来,
其特征在于,
所述联结构件包括使得所述第一构件和所述第二构件在所述加压机构的加压方向上相对移动的滚动构件,
在与所述加压方向正交的平面内,多个所述弹性构件配置在所述振子的周围,并且
在所述振子和所述接触构件的相对移动方向以及与所述加压方向和所述相对移动方向均正交的方向中的至少一个方向上,所述滚动构件配置在比多个所述弹性构件靠近所述振子的位置。
2.根据权利要求1所述的马达,其特征在于,在与所述加压方向正交的平面内,多个所述弹性构件被配置成包围所述振子。
3.根据权利要求1或2所述的马达,其特征在于,所述传递构件包括突出部和多个保持构件,所述突出部设置为与所述振子在所述加压方向上重叠,多个所述保持构件与所述突出部相比在所述相对移动方向上远离所述传递构件的中心并且分别保持各所述弹性构件。
4.根据权利要求3所述的马达,其特征在于,
多个所述弹性构件均为拉伸弹簧,
所述加压机构包括分别保持各所述拉伸弹簧的第一端的弹簧保持构件,并且
多个所述保持构件分别保持各所述拉伸弹簧的第二端。
5.根据权利要求1或2所述的马达,其特征在于,
所述联结构件包括作为所述滚动构件的第一滚动构件和第二滚动构件,并且
所述第一滚动构件和所述第二滚动构件配置成在所述相对移动方向上将所述振子夹在中间。
6.根据权利要求5所述的马达,其特征在于,所述联结构件包括在所述相对移动方向上对所述第一滚动构件或所述第二滚动构件施力的施力构件。
7.根据权利要求6所述的马达,其特征在于,在所述第一滚动构件和所述第二滚动构件中,受到所述施力构件施力的一方比不受所述施力构件施力的另一方大。
8.根据权利要求5所述的马达,其特征在于,所述第一滚动构件和所述第二滚动构件配置成各转动轴线均与所述相对移动方向和所述加压方向都正交。
9.根据权利要求1或2所述的马达,其特征在于,所述振子包括振动板和压电元件,所述振动板与所述接触构件接触,所述压电元件通过被施加电压而激发超声波振动。
10.一种电子设备,其包括根据利要求1或2所述的马达。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-090705 | 2016-04-28 | ||
| JP2016090705A JP6808345B2 (ja) | 2016-04-28 | 2016-04-28 | 振動波モータおよび振動波モータが搭載された電子機器、レンズ鏡筒、撮像装置 |
| CN201710293705.0A CN107342703B (zh) | 2016-04-28 | 2017-04-28 | 马达和包括马达的电子设备 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710293705.0A Division CN107342703B (zh) | 2016-04-28 | 2017-04-28 | 马达和包括马达的电子设备 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110112953A CN110112953A (zh) | 2019-08-09 |
| CN110112953B true CN110112953B (zh) | 2020-06-12 |
Family
ID=58671394
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710293705.0A Active CN107342703B (zh) | 2016-04-28 | 2017-04-28 | 马达和包括马达的电子设备 |
| CN201910354438.2A Active CN110112953B (zh) | 2016-04-28 | 2017-04-28 | 马达和包括马达的电子设备 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710293705.0A Active CN107342703B (zh) | 2016-04-28 | 2017-04-28 | 马达和包括马达的电子设备 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10840828B2 (zh) |
| EP (2) | EP3240180B1 (zh) |
| JP (1) | JP6808345B2 (zh) |
| KR (1) | KR102137195B1 (zh) |
| CN (2) | CN107342703B (zh) |
| BR (1) | BR102017007837B1 (zh) |
| PH (1) | PH12017000138B1 (zh) |
| RU (1) | RU2671943C2 (zh) |
| SG (1) | SG10201703315TA (zh) |
| TW (1) | TWI643440B (zh) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6808345B2 (ja) | 2016-04-28 | 2021-01-06 | キヤノン株式会社 | 振動波モータおよび振動波モータが搭載された電子機器、レンズ鏡筒、撮像装置 |
| US10763763B2 (en) * | 2016-04-28 | 2020-09-01 | Canon Kabushiki Kaisha | Motor and electronic apparatus including motor |
| JP6910936B2 (ja) * | 2017-11-27 | 2021-07-28 | キヤノン株式会社 | 振動型モータ、レンズ装置、および、電子機器 |
| JP6605012B2 (ja) * | 2017-12-08 | 2019-11-13 | キヤノン株式会社 | 振動波モータ及び振動波モータを用いたレンズ駆動装置 |
| JP7007943B2 (ja) * | 2018-02-08 | 2022-01-25 | キヤノン株式会社 | 振動波モータ及び振動波モータを備えたレンズ駆動装置 |
| JP2019146434A (ja) * | 2018-02-23 | 2019-08-29 | キヤノン株式会社 | 振動波モータ及びレンズ駆動装置 |
| JP2019195233A (ja) * | 2018-05-01 | 2019-11-07 | キヤノン株式会社 | 振動波モータ及び振動波モータを用いた駆動装置 |
| JP7112250B2 (ja) | 2018-05-24 | 2022-08-03 | キヤノン株式会社 | 振動波モータ及び駆動装置 |
| JP7098438B2 (ja) * | 2018-06-26 | 2022-07-11 | キヤノン株式会社 | 振動波モータ及び振動波モータを用いた駆動装置 |
| CN110601593A (zh) * | 2019-09-27 | 2019-12-20 | 长春工业大学 | 一种上置定子式自定心微纳压电直线驱动器 |
| CN111600505B (zh) * | 2020-05-27 | 2021-11-12 | 东华大学 | 一种可调负荷大步进幅值直线压电电机 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104065298A (zh) * | 2013-03-21 | 2014-09-24 | 佳能株式会社 | 线性超声波马达及包括该线性超声波马达的光学设备 |
| CN104753390A (zh) * | 2013-12-27 | 2015-07-01 | 佳能株式会社 | 超声波马达 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05252764A (ja) | 1992-03-05 | 1993-09-28 | Nikon Corp | 超音波モータ |
| JP4327268B2 (ja) * | 1998-06-01 | 2009-09-09 | セイコーインスツル株式会社 | 超音波モータ及び超音波モータ付電子機器 |
| JP4512408B2 (ja) | 2004-04-26 | 2010-07-28 | オリンパス株式会社 | 振動波リニアモータ及びそれを用いたレンズ装置 |
| JP2008178250A (ja) | 2007-01-19 | 2008-07-31 | Olympus Corp | 超音波振動子の押圧機構および超音波モータ |
| JP5117058B2 (ja) * | 2007-01-26 | 2013-01-09 | 太平洋セメント株式会社 | アクチュエータケースおよび超音波モータ |
| JP5185684B2 (ja) * | 2008-04-25 | 2013-04-17 | オリンパスイメージング株式会社 | 駆動装置および撮像装置 |
| JP2011166919A (ja) * | 2010-02-09 | 2011-08-25 | Olympus Corp | 超音波モータ機構 |
| JP5810303B2 (ja) * | 2010-04-06 | 2015-11-11 | パナソニックIpマネジメント株式会社 | 駆動装置 |
| US8643252B2 (en) * | 2010-05-11 | 2014-02-04 | Canon Kabushiki Kaisha | Vibration wave actuator |
| JP5744670B2 (ja) * | 2011-08-05 | 2015-07-08 | キヤノン株式会社 | 超音波モータ及びそれを有するレンズ装置 |
| JP5773900B2 (ja) * | 2012-01-30 | 2015-09-02 | キヤノン株式会社 | モータ |
| CN103684036A (zh) | 2012-09-18 | 2014-03-26 | 精工爱普生株式会社 | 压电马达、机器人手、机器人、电子部件搬运装置、电子部件检查装置、送液泵、打印装置 |
| JP5955347B2 (ja) * | 2013-04-01 | 2016-07-20 | キヤノン株式会社 | リニア超音波モータ及びそれを用いた光学装置 |
| JP2016036233A (ja) * | 2014-08-04 | 2016-03-17 | キヤノン株式会社 | 振動型アクチュエータ、光学機器、及び撮像装置 |
| US9653675B2 (en) * | 2014-10-10 | 2017-05-16 | Canon Kabushiki Kaisha | Driving apparatus, lens apparatus including the same, and imaging apparatus |
| JP6489940B2 (ja) * | 2015-05-28 | 2019-03-27 | キヤノン株式会社 | 振動波モータ |
| JP6539117B2 (ja) * | 2015-05-29 | 2019-07-03 | キヤノン株式会社 | 振動波モータ |
| JP6305377B2 (ja) * | 2015-08-04 | 2018-04-04 | キヤノン株式会社 | 振動型アクチュエータ、装置および光学機器 |
| JP6808345B2 (ja) | 2016-04-28 | 2021-01-06 | キヤノン株式会社 | 振動波モータおよび振動波モータが搭載された電子機器、レンズ鏡筒、撮像装置 |
-
2016
- 2016-04-28 JP JP2016090705A patent/JP6808345B2/ja active Active
-
2017
- 2017-04-07 TW TW106111750A patent/TWI643440B/zh active
- 2017-04-17 BR BR102017007837-0A patent/BR102017007837B1/pt active IP Right Grant
- 2017-04-19 RU RU2017113514A patent/RU2671943C2/ru active
- 2017-04-20 KR KR1020170050752A patent/KR102137195B1/ko active IP Right Grant
- 2017-04-21 PH PH12017000138A patent/PH12017000138B1/en unknown
- 2017-04-24 SG SG10201703315TA patent/SG10201703315TA/en unknown
- 2017-04-25 US US15/496,780 patent/US10840828B2/en active Active
- 2017-04-26 EP EP17168104.2A patent/EP3240180B1/en active Active
- 2017-04-26 EP EP18206409.7A patent/EP3490133B1/en active Active
- 2017-04-28 CN CN201710293705.0A patent/CN107342703B/zh active Active
- 2017-04-28 CN CN201910354438.2A patent/CN110112953B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104065298A (zh) * | 2013-03-21 | 2014-09-24 | 佳能株式会社 | 线性超声波马达及包括该线性超声波马达的光学设备 |
| CN104753390A (zh) * | 2013-12-27 | 2015-07-01 | 佳能株式会社 | 超声波马达 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW201739165A (zh) | 2017-11-01 |
| PH12017000138A1 (en) | 2019-01-21 |
| KR20170123243A (ko) | 2017-11-07 |
| EP3490133A1 (en) | 2019-05-29 |
| BR102017007837A2 (pt) | 2017-10-31 |
| RU2017113514A3 (zh) | 2018-10-19 |
| RU2671943C2 (ru) | 2018-11-08 |
| EP3240180B1 (en) | 2019-01-02 |
| PH12017000138B1 (en) | 2019-01-21 |
| SG10201703315TA (en) | 2017-11-29 |
| US20170317614A1 (en) | 2017-11-02 |
| EP3490133B1 (en) | 2021-12-01 |
| JP2017200361A (ja) | 2017-11-02 |
| TWI643440B (zh) | 2018-12-01 |
| CN107342703B (zh) | 2019-11-29 |
| CN110112953A (zh) | 2019-08-09 |
| EP3240180A1 (en) | 2017-11-01 |
| RU2017113514A (ru) | 2018-10-19 |
| US10840828B2 (en) | 2020-11-17 |
| BR102017007837B1 (pt) | 2023-12-12 |
| JP6808345B2 (ja) | 2021-01-06 |
| CN107342703A (zh) | 2017-11-10 |
| KR102137195B1 (ko) | 2020-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110112953B (zh) | 马达和包括马达的电子设备 | |
| JP5955347B2 (ja) | リニア超音波モータ及びそれを用いた光学装置 | |
| JP6188366B2 (ja) | アクチュエータ及び光学機器 | |
| JP6366674B2 (ja) | 振動波モータ | |
| US10541629B2 (en) | Vibration driven actuator, apparatus, and optical apparatus | |
| CN110138267B (zh) | 振动波马达和包括振动波马达的透镜驱动设备 | |
| JP6806472B2 (ja) | 振動波モータ及び振動波モータを適用した光学機器 | |
| JP2016140127A (ja) | リニア振動波モータ及びそれを有する撮像装置 | |
| CN109980986B (zh) | 振动型马达、镜头设备和电子装置 | |
| US11101749B2 (en) | Vibration wave motor and imaging device having vibration wave motor | |
| JP6929165B2 (ja) | 振動波モータおよび駆動装置 | |
| JP2018088821A (ja) | 振動型アクチュエータ、装置および光学機器 | |
| CN112019085B (zh) | 振动波电机及电子装置 | |
| JP2019198227A (ja) | アクチュエータ、装置 | |
| US11502625B2 (en) | Vibration wave motor, and driving apparatus having the same | |
| CN112468015B (zh) | 振动型马达和驱动设备 | |
| JP2019088048A (ja) | 超音波モータ、レンズ装置、および、撮像装置 | |
| JP6537482B2 (ja) | 振動波モータおよび電子機器 | |
| JP6708471B2 (ja) | 振動波モータ及び振動波モータが搭載された光学機器 | |
| JP2019201465A (ja) | 振動波モータ及び駆動装置 | |
| JP2020102971A (ja) | 振動波モータ | |
| JP2019083664A (ja) | 振動波モータ、レンズ装置、および、撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |