CN110096945B - 基于机器学习的室内监控视频关键帧实时提取方法 - Google Patents
基于机器学习的室内监控视频关键帧实时提取方法 Download PDFInfo
- Publication number
- CN110096945B CN110096945B CN201910152911.9A CN201910152911A CN110096945B CN 110096945 B CN110096945 B CN 110096945B CN 201910152911 A CN201910152911 A CN 201910152911A CN 110096945 B CN110096945 B CN 110096945B
- Authority
- CN
- China
- Prior art keywords
- frame image
- frame
- machine learning
- grayed
- gray
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/23—Clustering techniques
- G06F18/232—Non-hierarchical techniques
- G06F18/2321—Non-hierarchical techniques using statistics or function optimisation, e.g. modelling of probability density functions
- G06F18/23213—Non-hierarchical techniques using statistics or function optimisation, e.g. modelling of probability density functions with fixed number of clusters, e.g. K-means clustering
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/40—Scenes; Scene-specific elements in video content
- G06V20/46—Extracting features or characteristics from the video content, e.g. video fingerprints, representative shots or key frames
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Multimedia (AREA)
- General Physics & Mathematics (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Artificial Intelligence (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Computational Biology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Biology (AREA)
- Evolutionary Computation (AREA)
- General Engineering & Computer Science (AREA)
- Probability & Statistics with Applications (AREA)
- Signal Processing (AREA)
- Image Analysis (AREA)
Abstract
本发明提供了基于机器学习的室内监控视频关键帧实时提取方法,包括:采用机器学习中聚类算法K‑means++对不同情况下的监控环境进行分类,并确定各环境下的预警阈值;获取当前室内监控视频流,并获取多张帧图像;对帧图像进行预处理,以进行灰度化处理,得到灰度化帧图像;对每一张灰度化帧图像进行特征提取,通过检测亮度值对每一张灰度化帧图像的当前监控环境进行分类,并确定每张灰度化帧图像对应的预警阈值;从第2帧开始,计算当前灰度化桢图像的哈希指纹与前一桢灰度化帧图像的哈希指纹的汉明距离,以得到特征差T1;将当前灰度化帧图像与前一桢灰度化帧图像进行直方图相交匹配以得到相似性S1;进行关键帧提取。
Description
技术领域
本发明涉及视频关键帧提取技术领域,具体涉及基于机器学习的室内监控视频关键帧 实时提取方法。
背景技术
近几年,视频监控产业成高速增长的态势,高清化、智能化成为行业发展的主导方向, 随之而来的是视频录像数据爆炸式增长,安防系统的应用和性能受制于海量视频图像信息 的采集、分析和处理。现有的家庭监控系统多通过人工监视或回放来查看监控内容,找出 有用信息,然而由于监控数据冗余度高,实时监控者容易视觉疲劳和注意力下降,易造成 关键信息的错报、漏报。事后回放也只能在事故发生之后用于取证、调查和研究,无法在 事发时立即响应,告知相关人员,以便采取有效措施
后期通过在海量视频资料中甄选可以用于证据的数据这一工作也极为耗时耗力,难以 满足用户安防要求。现有的解决策略通常是单独配备硬件设备对图像进程处理,实现图像 检测,或是将视频数据传送到云端服务器,依赖高性能计算对数据进行处理,但前者需增 加额外硬件开销,加重用户负担,后者一旦服务器遭受攻击,则面临用户隐私泄露的危险。 因此,如何在监控中对关键信息进行实时有效的提取是本项目需要解决的问题。
图像预处理,目前的移动设备获取的图像大小几乎都达到了1920*1080,直接处理这么 大像素矩阵的图像对于移动端CPU有着较高的要求,利用双三次插值将图像缩小为16*9的 像素比,既保留了原始手机图像的宽高比特点,同时突出了特征部分。
发明内容
本发明要解决的技术问题在于,针对上述目前关于视频资料数据提取工作耗时耗力的 技术问题,提供基于机器学习的室内监控视频关键帧实时提取方法解决上述技术缺陷。
基于机器学习的室内监控视频关键帧实时提取方法,包括:
S1、采用机器学习中聚类算法K-means++对不同情况下的监控环境进行分类,并确定 亮度值不同的各环境下的预警阈值,以及亮度值和预警阈值的对应关系;
S2、获取当前室内监控视频流,并从当前室内监控视频流获取帧图像;
S3、对步骤S2中得到的帧图像进行预处理,以进行灰度化处理,得到灰度化帧图像;
S4、对步骤S3中得到的每一张灰度化帧图像进行特征提取得到亮度值,根据特征提取 得到的亮度值和所述对应关系,确定每张灰度化帧图像对应的预警阈值;
S5、从第2帧开始,计算当前灰度化桢图像的哈希指纹与前一桢灰度化帧图像的哈希 指纹的汉明距离,以得到特征差T1;将当前灰度化帧图像与前一桢灰度化帧图像进行直方 图相交匹配以得到相似性S1;
S6、判断并标注关键帧,进行关键帧提取:将T1和S1分别与步骤S4得到的预警阈值T、S对应的进行比对,若同时满足T1大于T、S1小于S,则将该帧图像标注为关键帧并提 取,以此判断标准逐步完成对后面所有关键帧的提取。
进一步的,步骤S2中获取帧图像的方法是从视频流中每秒提取1张帧图像。
进一步的,步骤S4中从每一张灰度化帧图像提取的特征包括亮度值、哈希指纹、直方 图。
进一步的,步骤S5中得到的特征差和相似性的数值数量比灰度化帧图像数量少1。
与现有技术相比,本发明优势在于:将对监控视频流的处理转换为对监控视频关键帧 的处理,在减少资源占用的同时,极大地加快了处理速度。为了提高对视频关键帧识别的 准确性,在视频帧间差异分析的基础上,使用机器学习中聚类算法k-means++,对监控环境 进行自动分类,以确定当前环境下的关键帧提取的阈值。选取亮度、哈希指纹、颜色直方 图作为视频图像特征。一旦监控视频发生异常,则将当前帧作为关键帧进行提取,存储在 本地关键帧图集,在降低数据冗余度的同时,也避免了因为环境的变化、干扰物体的出现 而产生误报、漏报,从而实现视频关键帧的智能提取。
附图说明
下面将结合附图及实施例对本发明作进一步说明,附图中:
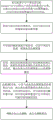
图1为本发明基于机器学习的室内监控视频关键帧实时提取方法流程图;
图2为本发明关键帧实时提取算法流程图;
图3为本发明提取出的关键帧图;
图4为本发明原始视频分帧图;
图5为本发明部分关键帧图。
具体实施方式
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发 明的具体实施方式。
基于机器学习的室内监控视频关键帧实时提取方法,如图1所示,包括:
S1、在PC端上采用机器学习中聚类算法K-means++对不同情况下的监控环境进行分 类,并确定明亮程度不同的各环境下的预警阈值。具体包括四个步骤:
准备数据:收集正常、亮、暗三种不同监控环境的图像;
数据集制作:提取上述三种不同环境图像特征,特征包括亮度值、哈希指纹、直方图;
训练模型:编写K-means++算法代码,并利用K-means++对监控环境进行分类;
确定阈值:将分类后各类质心的特征数据则为该监控环境下的预警阈值T(哈希指纹 的汉明距离)、S(直方图相似性),如下表所示。
| 亮度值 | 哈希指纹的汉明距离 | 直方图相似度 |
| 暗 | 14 | 0.6294 |
| 正常 | 8 | 0.6523 |
| 亮 | 17 | 0.7041 |
在本实施例中仅分出了三种室内监控环境,但在实际应用中室内监控环境不局限于上 述三种,在实际应用中,可以分类出亮度值不同的多种室内监控环境,且每种室内监控环 境均对应一组预警阈值。
S2、获取当前室内监控视频流,并从视频流中每秒提取1张帧图像,从而从当前室内 监控视频流获取多张帧图像。
对当前室内监控视频流进行实时采集,得到一帧一帧的帧图像;通过在Android的Camera拍摄预览中设置setPreviewCallback方法来实现onPreviewFrame接口,同时由于目前主流Android手机摄像头的超清画质和超高帧率,为了适应系统环境对每秒从摄像头获取的帧数限制为1张,从而提高了系统效率,通过SurfaceView显示画面。
S3、对步骤S2中得到的多张帧图像进行预处理,以进行灰度化处理,得到多张灰度化 帧图像。
图像预处理,目前的移动设备获取的图像大小几乎都达到了1920*1080,直接处理这么 大像素矩阵的图像对于移动端CPU有着较高的要求,利用双三次插值将图像缩小为16*9 的像素比,既保留了原始手机图像的宽高比特点,同时突出了特征部分。
S4、对步骤S3中得到的每一张灰度化帧图像进行特征提取,特征包括亮度值、哈希指 纹、直方图,通过检测亮度值对每一张灰度化帧图像的当前监控环境进行分类,并确定每 张灰度化帧图像对应的预警阈值。
哈希指纹:图片哈希指纹是检测一张图片的内容然后根据检测的内容为图片建立一个 唯一值的过程,给定一张图片作为输入,基于图像视觉应用一个Hash函数计算出一个图片 Hash。相似的图片拥有相似的Hash值,通过计算两张图片Hash数值的汉明距离,可以确 定其相似度。传统的感知哈希算法将图像压缩成8*8的尺寸,由于手机图像1920*1080的像素比,本项目将从手机摄像头直接采集的图片利用双三次插值法压缩成16*9的比例,这样就保留了手机图片特有的结构比例,在不改变图像明暗等信息的情况下,也摒弃了不同尺寸比例带来的图片差异,让Hash函数的输入与输出格式同一化。灰度化帧图像可以计算像素平均值G,每个像素点的像素值P。当P大于G时记该像素点为1否则为0,这样生成 的一串0,1序列即为每张图片的哈希指纹。
汉明距离:在信息论中,两个等长字符串之间的汉明距离是两个字符串对应位置的不 同字符的个数。利用图像指纹生成算法,输入监控视频相邻帧,可得到两个等长二进制串 a和b,其汉明距离等于aXORb中1的数目。
S5、帧间差量化,从第2帧开始,计算当前灰度化桢图像的哈希指纹与前一桢灰度化 帧图像的哈希指纹的汉明距离,以得到特征差T1、T2、T3…;将当前灰度化帧图像与前一桢灰度化帧图像进行直方图相交匹配以得到相似性S1、S2、S3…。
S6、判断并标注关键帧,进行关键帧提取。
如图2所示,将T1和S1分别与当前监控环境下的预警阈值T、S进行比对,若同时满足T1大于T、S1小于S,则将该帧图像标注为关键帧并提取,以此判断标准逐步完成对后 面所有关键帧的提取。
上述步骤实质上是计算灰度化帧图像的均值和方差,当存在亮度异常时,均值会偏离 均值点,方差也会偏小。通过计算灰度图的均值和方差,就可评估图像是否存在过曝光或 曝光不足。
实施后的最终效果如图3所示,可以看到,该算法对远处关键扰动,及有人闯入画面 的情况有着良好的抓取情况。同时,在65号关键帧与121号关键帧之间,有着小范围的频繁的扰动,如图4所示;由于这些帧中,人为活动比较小,且活动较为单一,所以只需选 择其中一张作为这段时间的关键帧即可,也就是第65号。而当监控主体对象重新站起,并 进行下一次活动时,应该作为下一次活动的开始,属于需要抓取的扰动部分,由图5可知, 算法抓取了第121号图片作为扰动开始点,并且连续抓出122-126号,记录这段活动的行 为轨迹,而当实验对象再次处于一个相对小范围活动的状态时,抓取了对画面扰动明显的 站立起身图像,如图5所示。该监控视频,通过实时的关键帧提取,用户可以得到的关键 帧序列如图4和图5所示。
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施 方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在 本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形 式,这些均属于本发明的保护之内。
Claims (4)
1.基于机器学习的室内监控视频关键帧实时提取方法,其特征在于,包括:
S1、采用机器学习中聚类算法K-means++对不同情况下的监控环境进行分类,并确定亮度值不同的各环境下的预警阈值,以及亮度值和预警阈值的对应关系;所述预警阈值为哈希指纹的汉明距离阈值和直方图相似度阈值;
S2、获取当前室内监控视频流,并从当前室内监控视频流获取帧图像;
S3、对步骤S2中得到的帧图像进行预处理,以进行灰度化处理,得到灰度化帧图像;
S4、对步骤S3中得到的每一张灰度化帧图像进行特征提取得到亮度值,根据特征提取得到的亮度值和所述对应关系,确定每张灰度化帧图像对应的预警阈值T、S;
S5、从第2帧开始,计算当前灰度化桢图像的哈希指纹与前一桢灰度化帧图像的哈希指纹的汉明距离,以得到特征差T1;将当前灰度化帧图像与前一桢灰度化帧图像进行直方图相交匹配以得到相似性S1;
S6、判断并标注关键帧,进行关键帧提取:将T1和S1分别与步骤S4得到的预警阈值T、S对应的进行比对,若同时满足T1大于T、S1小于S,则将该帧图像标注为关键帧并提取,以此判断标准逐步完成对后面所有关键帧的提取。
2.根据权利要求1所述的基于机器学习的室内监控视频关键帧实时提取方法,其特征在于,步骤S2中获取帧图像的方法是从视频流中每秒提取1张帧图像。
3.根据权利要求1所述的基于机器学习的室内监控视频关键帧实时提取方法,其特征在于,步骤S4中从每一张灰度化帧图像提取的特征包括亮度值、哈希指纹、直方图。
4.根据权利要求1所述的基于机器学习的室内监控视频关键帧实时提取方法,其特征在于,步骤S5中得到的特征差和相似性的数值数量比灰度化帧图像数量少1。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910152911.9A CN110096945B (zh) | 2019-02-28 | 2019-02-28 | 基于机器学习的室内监控视频关键帧实时提取方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910152911.9A CN110096945B (zh) | 2019-02-28 | 2019-02-28 | 基于机器学习的室内监控视频关键帧实时提取方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110096945A CN110096945A (zh) | 2019-08-06 |
| CN110096945B true CN110096945B (zh) | 2021-05-14 |
Family
ID=67443935
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910152911.9A Active CN110096945B (zh) | 2019-02-28 | 2019-02-28 | 基于机器学习的室内监控视频关键帧实时提取方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110096945B (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110852203B (zh) * | 2019-10-28 | 2022-04-22 | 西安交通大学 | 一种基于视频特征学习的多要素可疑人员识别方法 |
| WO2021154861A1 (en) * | 2020-01-27 | 2021-08-05 | Schlumberger Technology Corporation | Key frame extraction for underwater telemetry and anomaly detection |
| CN113128399B (zh) * | 2021-04-19 | 2022-05-17 | 重庆大学 | 用于情感识别的语音图像关键帧提取方法 |
| CN113542771A (zh) * | 2021-07-15 | 2021-10-22 | 广东电网有限责任公司中山供电局 | 一种基于内容权重的视频高效压缩处理方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001022792A (ja) * | 1999-05-28 | 2001-01-26 | Fuji Xerox Co Ltd | キーフレーム選択のための候補フレームを選択する方法 |
| CN101872346A (zh) * | 2009-04-22 | 2010-10-27 | 中国科学院自动化研究所 | 一种自动生成视频导航系统的方法 |
| CN103426176A (zh) * | 2013-08-27 | 2013-12-04 | 重庆邮电大学 | 基于改进直方图和聚类算法的视频镜头检测方法 |
| CN104182957A (zh) * | 2013-05-21 | 2014-12-03 | 北大方正集团有限公司 | 交通视频信息检测方法和装置 |
| CN104994366A (zh) * | 2015-06-02 | 2015-10-21 | 陕西科技大学 | 一种基于特征加权的fcm视频关键帧提取方法 |
| CN105025392A (zh) * | 2015-06-25 | 2015-11-04 | 西北工业大学 | 基于摘要空间特征学习的视频摘要关键帧提取方法 |
| CN105721955A (zh) * | 2016-01-20 | 2016-06-29 | 天津大学 | 一种视频关键帧选取方法 |
| CN107483985A (zh) * | 2017-07-20 | 2017-12-15 | 北京中科火眼科技有限公司 | 一种广告精准定位方法 |
| CN107483887A (zh) * | 2017-08-11 | 2017-12-15 | 中国地质大学(武汉) | 一种智慧城市视频监控中突发情况的预警检测方法 |
| CN109271957A (zh) * | 2018-09-30 | 2019-01-25 | 厦门市巨龙信息科技有限公司 | 人脸性别识别方法以及装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2846502B1 (fr) * | 2002-10-28 | 2005-02-11 | Thomson Licensing Sa | Procede de selection de germes pour le regroupement d'images cles |
-
2019
- 2019-02-28 CN CN201910152911.9A patent/CN110096945B/zh active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001022792A (ja) * | 1999-05-28 | 2001-01-26 | Fuji Xerox Co Ltd | キーフレーム選択のための候補フレームを選択する方法 |
| CN101872346A (zh) * | 2009-04-22 | 2010-10-27 | 中国科学院自动化研究所 | 一种自动生成视频导航系统的方法 |
| CN104182957A (zh) * | 2013-05-21 | 2014-12-03 | 北大方正集团有限公司 | 交通视频信息检测方法和装置 |
| CN103426176A (zh) * | 2013-08-27 | 2013-12-04 | 重庆邮电大学 | 基于改进直方图和聚类算法的视频镜头检测方法 |
| CN104994366A (zh) * | 2015-06-02 | 2015-10-21 | 陕西科技大学 | 一种基于特征加权的fcm视频关键帧提取方法 |
| CN105025392A (zh) * | 2015-06-25 | 2015-11-04 | 西北工业大学 | 基于摘要空间特征学习的视频摘要关键帧提取方法 |
| CN105721955A (zh) * | 2016-01-20 | 2016-06-29 | 天津大学 | 一种视频关键帧选取方法 |
| CN107483985A (zh) * | 2017-07-20 | 2017-12-15 | 北京中科火眼科技有限公司 | 一种广告精准定位方法 |
| CN107483887A (zh) * | 2017-08-11 | 2017-12-15 | 中国地质大学(武汉) | 一种智慧城市视频监控中突发情况的预警检测方法 |
| CN109271957A (zh) * | 2018-09-30 | 2019-01-25 | 厦门市巨龙信息科技有限公司 | 人脸性别识别方法以及装置 |
Non-Patent Citations (5)
| Title |
|---|
| A Clustering Algorithm for Key Frame Extraction Based on Density Peak;Hong Zhao 等;《Journal of Computer and Communications》;20181226;第118-128页 * |
| A Video Fingerprint Based on Visual Digest and Local Fingerprints;Ayoub Massoudi 等;《2006 International Conference on Image Processing》;20070220;第1-5页 * |
| Key frame extraction scheme based on sliding window and features;Linchen Yu 等;《Peer-to-Peer Network and Application(2018)》;20170531;第1141-1152页 * |
| 基于 k-means++聚类的视频摘要生成算法;张亚洲 等;《工业控制计算机》;20170725;第30卷(第7期);第129-130页 * |
| 基于距离阈值聚类的关键帧提取方法;马振磊 等;《鲁东大学学报(自然科学版)》;20180415;第34卷(第2期);第128-135页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110096945A (zh) | 2019-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110096945B (zh) | 基于机器学习的室内监控视频关键帧实时提取方法 | |
| KR101942808B1 (ko) | 객체 이미지 인식 dcnn 기반 cctv 영상분석장치 | |
| CN111191576B (zh) | 人员行为目标检测模型构建方法、智能分析方法及系统 | |
| CN110008797B (zh) | 一种多摄像机多人脸视频接续采集方法 | |
| CN108564052A (zh) | 基于mtcnn的多摄像头动态人脸识别系统与方法 | |
| CN112800860B (zh) | 一种事件相机和视觉相机协同的高速抛撒物检测方法和系统 | |
| CN110738127A (zh) | 基于无监督深度学习神经网络算法的安全帽识别方法 | |
| KR20200058260A (ko) | 객체 이미지 인식 dcnn 기반 cctv 영상분석장치 및 그 장치의 구동방법 | |
| CN112183313A (zh) | 一种基于SlowFast的电力作业现场动作识别方法 | |
| CN110503092B (zh) | 基于领域适应的改进ssd监控视频目标检测方法 | |
| CN115035088A (zh) | 一种基于yolov5和姿态估计的安全帽佩戴检测方法 | |
| CN112153373A (zh) | 明厨亮灶设备的故障识别方法、装置及存储介质 | |
| WO2022213540A1 (zh) | 目标检测、属性识别与跟踪方法及系统 | |
| CN108174198B (zh) | 一种视频图像质量诊断分析检测设备及应用系统 | |
| CN110659627A (zh) | 一种基于视频分割的智能视频监控方法 | |
| CN111708907B (zh) | 一种目标人员的查询方法、装置、设备及存储介质 | |
| CN106971150B (zh) | 基于逻辑回归的排队异常检测方法及装置 | |
| CN111126378B (zh) | 一种视频osd提取与覆盖区域重建的方法 | |
| CN117475353A (zh) | 基于视频的异常烟雾识别方法及系统 | |
| CN112633179A (zh) | 基于视频分析的农贸市场过道物体占道检测方法 | |
| CN116419059A (zh) | 基于行为标签的自动监控方法、装置、设备及介质 | |
| CN114973135A (zh) | 一种基于头肩的时序视频睡岗识别方法、系统及电子设备 | |
| CN114037937A (zh) | 一种基于多目标追踪的实时冰箱食材识别方法 | |
| CN114092965A (zh) | 安全帽检测与颜色识别方法、系统、存储介质及计算机设备 | |
| CN112487864A (zh) | 一种面向施工现场的对于小目标安全帽和防护服检测方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |