CN110030969B - 光学测量装置、利用其协调目标物体的方法和存储介质 - Google Patents
光学测量装置、利用其协调目标物体的方法和存储介质 Download PDFInfo
- Publication number
- CN110030969B CN110030969B CN201811493532.8A CN201811493532A CN110030969B CN 110030969 B CN110030969 B CN 110030969B CN 201811493532 A CN201811493532 A CN 201811493532A CN 110030969 B CN110030969 B CN 110030969B
- Authority
- CN
- China
- Prior art keywords
- optical measuring
- measuring device
- optical
- optical element
- diffractive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C1/00—Measuring angles
- G01C1/02—Theodolites
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C5/00—Measuring height; Measuring distances transverse to line of sight; Levelling between separated points; Surveyors' levels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4808—Evaluating distance, position or velocity data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0025—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 for optical correction, e.g. distorsion, aberration
- G02B27/0037—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 for optical correction, e.g. distorsion, aberration with diffracting elements
- G02B27/0043—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 for optical correction, e.g. distorsion, aberration with diffracting elements in projection exposure systems, e.g. microlithographic systems
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
本发明涉及光学测量装置、利用其协调目标物体的方法和存储介质,该光学测量装置具有:用于放置测量装置(1)的基座;和瞄准单元(3),该瞄准单元可相对于该基座旋转并且限定用于瞄准待测量的目标物体(40)的目标轴(9)。瞄准单元(3)具有用于沿待测量的目标物体(40)的方向发射光学测量辐射(10、10i、10d、10h)的第一射束光束路径(20、20a)。瞄准单元(3)还具有衍射光学元件(30),其被布置或可布置在射束光束路径(20、20a)中,使得光学测量辐射(10、10i、10d、10h)被均匀化。
Description
技术领域
本发明涉及用于协调测量目标物体的测量装置,并且涉及协调测量方法。
背景技术
用于测量目标物体的协调测量技术装置经常基于光学测量系统操作。这些装置通常沿待测量的目标物体的方向发射光学辐射(特别是激光辐射),根据其来确定距离和角位置(即,目标物体的极坐标),这通常随后加以进一步处理。在该过程中待测量的目标物体将一部分所发射的辐射反射回该装置,由此被接收并转换成用于距离确定的电信号。除了测量天然存在的目标外,还可以将特殊目标标记或反射器贴附至目标物体,或者例如将移动测量棒用作目标物体。
在这里,所发射的光学辐射可以被用于基于飞行时间或相位测量原理或这些原理的组合的电光距离测量,举例来说,如在EP 1757956、JP 4843128、EP 1311873、EP1450128、EP 1882959、EP 1043602、WO 2006/063739或其它中描述的。
所发射的光学辐射还可以被用于目标物体的识别和/或角度测量。例如,目标标记可以例如以反向反射器或目标物体的视觉特征(例如,角落、边缘、对比区域的边界等)的形式来具体实施,举例来说,如在WO 2011/141447或EP 1791082中所描述的。在这方面,以脉冲化或连续方式发射的光学辐射可以由测量装置发射,以支持目标在视场中的识别。可以利用装置中的位置敏感光学接收元件来执行采用角坐标的这种类型的目标物体的识别和/或测量,例如,利用CCD或CMOS技术的区域传感器、基于横向光电效应的PSD、或者一个或更多个光感受器(诸如光电二极管、二分电池(bi-cell)、正交二极管、SPAD阵列等)的布置。
对于角度确定来说,该测量装置通常设置有一个或更多个角度计或测角仪,利用一个或更多个角度计或测角仪,该装置或其部件可以旋转以用于瞄准目的并且可以确定角位置。这里可以利用角度计评估,经由利用该装置的目标轴精确地瞄准目标物体来执行目标的角度测量。然而,尤其是在适用于此的协作目标的情况下,还可以在具有角度计的装置的光电角度测量单元(ATR)的视场内执行目标物体的不精确瞄准。通过在视场内确定与理想瞄准的偏差,随后通过该偏差校正角度计测量值(自动目标识别或目标方向测量ATR)。例如在JP 3748112或GB 2353862中描述了类似过程。在测量装置中,绕角度计的旋转轴的移动可以手动和/或通过马达执行。
对于距离和角度确定来说,在每种情况下都可以使用由装置发射的分离或共同辐射,即,针对两个功能使用同一个测量光束或辐射源,或者在每种情况下,一个测量光束用于距离测量,一个光束用于角度确定或目标识别。对于非协作目标的测量,测量光束的发散必须尽可能小,优选被衍射限制,因为否则距离测量会由于未定义的目标物体照明而不提供所需的测量准确度。
在协调测量技术中,针对角度确定和距离确定都需要高测量准确度。例如,在测量或大地测量领域使用视距仪或全站仪,其具有几毫米甚或小于一毫米的距离测量准确度。这里在针对三棱镜或反向反射目标标记的测量中需要几公里的测量区域,或者针对无反射器测量来说,需要几百到一千米以上的测量区域。角度测量的准确度通常在小于2弧秒到10弧秒的范围内,优选为1弧秒、0.5弧秒或以下。而且,由于这种测量装置通常用于具有广泛变化的环境条件(诸如温度、湿度等)的恶劣环境中,因此这些要求变得更加困难。
通过在测量装置中集成越来越多的功能,装置内部的光路或光束路径变得越来越复杂。测量装置例如可以具有:用于距离测量的光束路径、可见引导光束、自动目标搜索、自动目标识别、自动目标对齐、目视观察、概览摄像机、缩放功能、图像记录、目标照明、光学数据通信、内部参照部分等。由于需要大量光学组件,不仅装置设计变得更加困难,而且测量光束的特性也受到影响,可能会受到很大的负面影响。
测量光束特性或测量光束质量对测量准确度起着决定性作用。在相干测量辐射的情况下出现测量准确度的损害(例如由于出现所谓的斑点),即,由于物体表面处的后向散射引起的光学干涉,这导致接收信号强度的变化。而且,测量不准确度尤其是由于测量光束的轮廓(通常是所谓的高斯(Gaussian)轮廓)而出现,其尤其对于测量协作目标物体而言是不利的。另外,光脉冲的横向或径向强度分布是时间依赖的,其结果是时间依赖和角度依赖的照明场。由于这些因素,例如所测量的距目标物体的距离不利地取决于到目标的方向,并且另外随时间不恒定。这意味着,对于距待测量目标的同一个实际存在距离来说,对于按不同时间和按相对于该目标的不同角度的测量,测量出不同距离;换句话说,存在测量不确定性。
而且,目标识别在目标的不均匀照明的情况下并且还在偏振变化的情况下变得更加困难。
发明内容
因此,本发明的目的是提供一种用于协调测量目标物体的改进测量装置或改进协调测量方法。
一个特殊目的是提供一种具有改进测量光束的测量装置。
本发明的目的是提供一种用于协调测量目标物体的光学测量装置,例如经纬仪、全站仪、激光跟踪仪、激光扫描仪、或激光调平装置。所述测量装置具有至少一个光源,优选为激光源,其用于生成至少一个光学(特别是脉冲化)测量光束。而且,所述装置具有相对于所述测量装置的基座可绕至少一个轴(特别是绕两个轴)旋转的瞄准单元,其中,所述瞄准单元限定用于瞄准待测量的目标物体(特别是协作目标物体)的目标轴,并且具有用于在该待测量的目标物体的方向上引导和发射所述光学测量光束的光束路径,并且所述装置具有接收光学单元。用于此目的的所述光束路径例如具有从现有技术已知的光学单元或光学元件。而且,所述瞄准单元具有至少一个衍射光学元件(DOE)。所述DOE被这样具体实施并且被布置或可布置(在优选实施方式中的DOE不是永久性地布置在所述光束路径中,而是可以因情况不同,或者根据应用类型、测量任务或目标物体全部布置在那里,或者部分地布置在那里,例如在存在被划分成不同有效区域的DOE的情况下)在所述光束路径中,使得所述测量光束在发射之前被均匀化(homogenized)。均匀化在此理解为意指使测量光束一致,或者在合适时使测量光束脉冲一致,使得因混合而消除或至少显著降低所述测量光束的强度和光谱分布的不均匀性或不均一性或不均等分布或空间或时间变化。
例如,所述衍射光学元件被具体实施用于混合所述测量光束,特别是用于生成一个接一个放置的多个至少部分重叠的部分光束。由于混合,不均等分布在某种程度上被调平,并且获得均一或至少更均一的测量光束,即,均匀测量光束。
所述衍射光学元件被具体实施为用于均匀化所述测量光束内的时间和/或空间强度分布的选项。另选地或者另外地,所述DOE被具体实施用于均匀化所述测量光束在物体空间中的模式(优选地通过将它们混合),和/或用于均匀化所述测量光束的所述光学波前(特别是其平滑化),和/或在远场中对所述光源进行成像。在此,例如经由在相位板处解相关光学相位,来执行所述混合并由此执行所述波前的调平。作为进一步附加或进一步另选,在具有脉冲测量光束的装置中,经由DOE实现对在光束横截面上变化的测量光束脉冲的飞行时间的均匀化。
在所述测量装置的开发中,为了时间均匀化,所述测量光束和所述衍射光学元件的相对位置动态地(特别是周期性地)变化,优选地以如下形式:被布置或可布置在光束路径中的所述衍射光学元件将是可移动的,以使所述元件在整个所述测量光束上动态可移动。例如,所述DOE是可振动的,特别是垂直于所述测量光束的传播轴可振动,和/或是可旋转的,特别是绕所述测量光束的传播轴或者相对于其具有平行偏移或者具有偏心率的轴可旋转。
在一附加或另选开发例中,所述DOE被具体实施用于改变所述测量光束的光束轮廓(特别是在远场中),或者用于测量布置得更远的目标物体。例如,高斯光束轮廓(作为具有不均一的不均匀强度分布的轮廓的典型例子)被均匀化成顶帽光束轮廓。另选地或者另外地,所述DOE被具体实施为减少或消除所述测量光束的时间和/或方向依赖不均匀性,特别是相对于所述光束路径沿纵向方向的强度不均匀性和相对于光束路径沿横向方向的光谱强度不均匀性。
作为另一选项,沿所述光束路径布置或可布置的是至少一个另外衍射光学元件,其同样被配置用于特别是与上述第一DOE协作地均匀化所述测量光束。
可选地,所述衍射光学元件被具体实施用于特别是按至多3°的发散角(通常为0.075°、0.1°、0.2°、1°或1.5°)发散地发射所述测量光束。所述发散优选地适于所述接收光学单元的接收角度或视场(FOV),使得其被由目标散射回或反射回的测量光束最佳地照亮。作为另一选项,例如,经由自动改变所述衍射光学元件相对于所述测量光束或光束路径的相对位置,可执行在发散与准直之间自动切换所述光束路径的轴向聚焦。
所述瞄准单元可选地这样具体实施,并且所述衍射光学元件被布置在所述瞄准单元中,使得来自所述衍射光学元件的所述测量光束作为自由光束传播。作为另一选项,用于发射所述测量光束的整个光束路径没有光导,即,所述测量光束作为自由光束通过整个光束路径。所述光源优选为激光二极管,其中,特别是,所述激光二极管被具体实施为边缘发射器。而且,测量装置优选具有光电子测距仪,并且所述测量光束适于利用所述光电子测距仪确定离所述目标物体的距离。然后,所述光源例如是测距仪的组成部分,并且所述测量光束仅用于距离确定。另选地,所述测量光束还用于进一步的测量任务,例如,作为用于自动目标识别或目标方向测量的ATR光束。由于激光束的波前或调制前沿的解相关,所述衍射光学元件提供高均匀性的横向扩展光源,其不再限于点或发射线。所述光源的这种空间扩展另外具有更大可容许激光安全限制的优点。
作为一选项,所述测量装置具有利用光学发散目标识别光束的这种自动目标识别,并且所述衍射光学元件被这样具体实施并且布置在所述目标识别光束的光束路径中,使得所述目标识别光束在发射之前被均匀化。如上提到的,所述目标识别光束是测量光束或附加光束。例如,具有发散度1.5°的发散测量光束经由衍射光学元件(以及可能或可选地恰当设计的透射光学单元)在物体空间中生成。经由所述全息图生成的发散度在此可以可选地在一定范围内自由选择,这是因为可以利用布置在所述全息图下游的透镜光学单元和光阑(stop)布置来设定物体空间中的发散度。因此,所述衍射光学元件还可以被具体实施为生成所述测量光束的大于1.5°但优选不大于3°的发散度。
作为另一选项,另选地或者另外地,针对可以根据情况而存在的所述光电测距仪,使用所述衍射光学元件生成发散测量光束。那么所述发散度优选为0.2°。所述衍射光学元件可以被具体实施成使得可由此生成不同发散度,例如,根据其当前是被用于目标识别还是距离测量。为了能够利用DOE生成不同发散度,例如将后者划分成不同发散度生成区段。另选地,所述瞄准单元具有多个DOE,其具有不同发散度生成特性(和/或均匀化特性),它们可根据要求例如经由平移和/或旋转位移机构布置在所述光束路径中。
所述衍射光学元件可选地以光学漫射器的形式具体实施(特别是以至多3°的散射角)和/或经由复制技术生成,特别是其中,所述衍射光学元件具有经由复制技术施加的涂层材料,特别是具有小于0.15mm的层厚度,特别是小于0.05mm。另选地或者另外地,所述DOE由玻璃(特别是冕玻璃)、塑料或玻璃与塑料的组合构成。作为另一选项,所述DOE按全息图(特别是结构全息图)的形式具体实施,和/或具体实施为由具有衍射结构的折射(特别是非球面或球面)透镜制成的混合透镜。作为另一选项,所述衍射光学元件保持偏振,即,其不改变入射或通过测量辐射的偏振。这使得可以利用发送光束发送附加的基于偏振的调制或编码。这例如可以被用于相位调制的测距仪或用于目标物体编码。
作为进一步附加或进一步另选,所述衍射光学元件被具体实施用于特别是以高阶衍射的具有总体强度的不到5%的比例的剩余强度,特别是通过在针对这些衍射级的衍射情况下生成大散射圆,来抑制零阶衍射和/或大于一的衍射级。
而且,本发明的一部分是一种用于利用光学测量装置(例如,经纬仪、激光扫描仪、激光水准仪或全站仪)来协调测量(特别是协作)目标物体的方法。作为所述方法的一部分,以所述测量装置的瞄准单元的目标轴来瞄准所述目标物体,其中,在所述目标物体(特别是放置在远场中的所述目标物体)的方向上(即,例如在至少10m或15m的距离处),沿着第一光束路径发射光学(特别是脉冲和/或发散)测量辐射(特别是激光辐射)来执行所述瞄准。而且,作为所述方法的一部分,在利用处于所述光束路径中的衍射光学元件发射之前,执行所述测量辐射的均匀化(特别是时间和/或空间均匀化)。
经由所述DOE的均匀化可选地意指使所述测量辐射和/或所述测量辐射在物体空间中的模式的时间和/或空间强度分布一致。另选地或者另外地,所述均匀化意指使所述测量辐射的波前一致(特别是其平滑化或调平),和/或在脉冲测量辐射的情况下使测量辐射脉冲的飞行时间一致。
本发明的进一步目的是一种具有存储在机器可读载体上的程序代码(特别是上述协调测量装置)的计算机程序产品,或者用于执行上述方法的通过电磁波具体实施的计算机数据信号。
附图说明
下面基于附图中示意性地例示的具体示例性实施方式,完全采用示例的形式,对根据本发明的方法和根据本发明的装置进行更详细描述。在该点上,还将对本发明的进一步优点加以说明。详细地说:
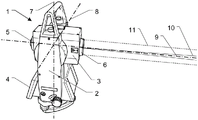
图1示出了本发明意义上的测量装置的实施方式的示例;
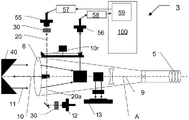
图2a示出了根据本发明的测量装置的第一实施方式的内部构造的示意性例示图;
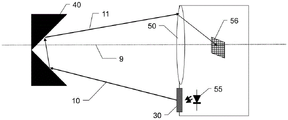
图2b示出了根据本发明的测量装置的第二实施方式的内部构造的示意性例示图;
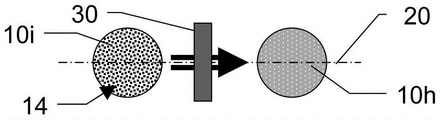
图3a、图3b以及图3c示出了根据本发明的均匀化的示意性例示图;
图4示出了根据本发明的均匀化的另一示例的示意性例示图;
图5示出了根据本发明的均匀化的另一示例的示意性例示图;
图6示出了根据本发明的均匀化的另一示例的示意性例示图;以及
图7a和图7b示出了针对测量光束的因情况而不同的修改例的示意性例示图。
具体实施方式
图1示出了采用本发明的大地测量光学测量装置1的示例。装置1具有基座,基座例如经由支架(这里未例示)进行配置以用于测量目的。布置在基座上的是装置1的装置主体2,具有可绕竖轴7旋转的垂直测角仪。基座具有用于例如利用三个调节螺钉和圆形水准仪和/或电子水准仪水平化装置1(换句话说,用于竖轴7的垂直调节)的装置。装置主体2具有操作单元4并且经由可绕倾斜轴8旋转的倾斜轴测角仪连接到瞄准单元3。在所示情况下,瞄准单元3具有望远镜,该望远镜具有物镜6和目镜5;换句话说,设置有视觉通道。其它实施方式除了所述光学望远镜以外或作为其另选,还可以具有数字目镜和/或处于操作单元4或外部控制装置上的显示器。瞄准单元3限定目标轴9,目标轴在理想情况下与倾斜轴测角仪的倾斜轴8完全垂直,该倾斜轴又垂直于垂直测角仪的垂直对齐竖轴7。因此,这三个轴可相对彼此至少近似正交地移动,并且目标轴9可经由瞄准单元3的移动而移动,该瞄准单元相对于基座绕两个轴限定该移动。利用瞄准单元3中的光电测距仪在目标轴9的方向上执行距离测量,光电测距仪的光轴对应于目标轴9的理想情况下的目标线。
从而,装置1可以在极坐标中使用两个测角器和测距仪来测量所瞄准目标物体,例如,反向反射器或反射目标标记。从而,极坐标也可以转换成其它坐标系,或者可以在此基础上,执行更复杂的测量任务和计算,其例如可经由操作单元4以由装置内部数字计算机或利用外部计算机控制的方式来执行。
所示示例中的光电测距仪被配置成使得所发射光学测量辐射10的光束路径和由装置1接收的光学辐射11的光束路径具有至少近似共同的光轴,其在理想情况下,也与目标轴9重合。这里的主要先决条件是,至少确保接收器的光轴与发送器的目标线对准,使得接收器的视场捕获发送器在目标物体上的光斑。
所示实施方式是光学测量装置1,该光学测量装置具有:用于放置该装置1的基座;和瞄准单元3,该瞄准单元可相对于该基座绕两个轴7和8旋转,该两个轴设置有测角器。这里,瞄准单元3具有用于瞄准待测量的目标物体40的目标轴9,其中例如可以通过照准望远镜和/或经由测量光束10的(或者可选地还有分离瞄准光束(例如,激光指示器)的)目标轴来执行瞄准。而且,瞄准单元3具有用于在待测量的目标物体40的方向上发射光学测量辐射10的光束路径和用于通过光电接收元件接收由目标物体反射的光学测量辐射11的一部分的另一光束路径,其中两个光束路径可以至少部分地叠合(congruent)。
所发射测量光束10的特性对于测量准确度具有重要意义。距离测量的准确度还受目标本身的影响。在反向反射器中,不可避免地实现所发射辐射的调制波前的空间选择,这可能导致系统性距离偏差。在反射带和漫反射目标中,出现斑点,斑点产生色度所致的测量偏差。在自然目标物体的情况下,反射率通常在表面上变化,这导致入射测量光束10的空间加权,并且如果存在不均匀调制波前,那么绝对距离测量准确度降低。
尤其是在因所谓的斑点出现而引起的激光辐射或相干辐射的情况下,出现测量准确度降低。具体而言,但不仅如此,在ATR的情况下,斑点的存在会干扰方向测量并降低ATR的角度准确度。针对现今要求的精度,另一个问题通过测量光束10或测量光束脉冲的空间或时间变化产生。特别是,在将激光二极管用作辐射源时,因为激光二极管在整个活动表面上不均一地发射辐射,出现这样的缺点。例如,波形具有不规则性或波形根据发射角度而变化。
在测量无反射器目标的情况下并且还在用于反向反射目标标记的发散测量光束的情况下,在衍射受限的准直测量光束10中都需要光束均匀化。
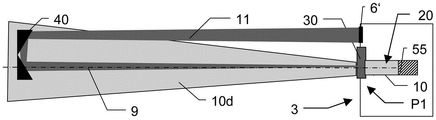
图2a示出了根据本发明的测量装置1(例如,大地测量装置1)的瞄准单元3的第一实施方式的内部构造的示例,其消除或至少显著减少了上述缺点。该示例中所示的组件及其布置应该被认为是完全示意性的,并且在其它实施方式中也可以变化,或者其部分在装置主体2内还可以被省略、补充或移动。
如图1所示,装置1设置有视线通道,即,具有目镜5,通过目镜5可以观察到进入物镜6的光。另选地或者另外地,观察图像可以由摄像机13记录,并且可以在监视器或显示器上观察所述图像,这是经由物镜6和装置1中的另一些光学单元(未例示)生成的。在该系统中必不可少的所有光学组件与公共光轴A对准,或者参照公共光轴A(例如,具有相应组件的轴相对彼此的已知未对准或容差)。在所示情况下,观察的光轴A对应于装置的目标轴9,在观察期间可以经由诸如十字准线等的瞄准辅助装置使其可标识。
而且,示出了光电测距仪(EDM)的一些基本部件。装置1的控制单元100连接至EDM控制器59,EDM控制器经由驱动器级57控制光源55发射光学测量辐射10,优选为激光辐射。光源55例如被具体实施为半导体光源,例如,具体实施为边缘发射激光二极管(空间单模或多模)或具体实施为采用固态激光器、光纤激光器或MOPA(具有光学放大器的种子激光器)或其组合的形式的激光光源。可以存在一个或更多个光源55,其例如可以表现出不同的光学特性,诸如波长、偏振等。还可以使用半导体激光元件,利用该半导体激光元件可发射多于一个波长的光。举例来说,可以仅提供具有对应光谱宽带发射光谱的单个发送器55,并通过与对应滤波器、物镜或光学元件(诸如下面描述的衍射光学元件)组合来使用其发射不同波长范围和发散度的交替辐射。例如提供用于自动目标识别的第一波长,所述第一波长处于红外或可见光范围内,并且提供针对该距离测量光束的处于偏离其的红外范围内的第二波长,并且指引(pointer)光束的波长处于可见光范围内。
在根据本发明的在此所示的实施方式中,设置在光束路径20中用于引导和发射装置1的光源55的光的是衍射光学元件30(DOE),即,经由衍射来影响光路或测量光束10的光学元件。DOE在此被这样具体实施并且布置在光束路径20中,使得测量光束10被均匀化,即,减少或最小化或消除不均一性,或者减少或消除测量光束的时间和/或方向依赖不均匀性,诸如强度不均匀性或模式分布。如示例中所示,DOE 30被布置在自由光束中。因此,测量光束10在通过DOE 30之后,自由地发射到待测量目标上,并且来自DOE 30的测量光束10不耦合到光导中。在不使用光导的情况下将测量光束10发射到目标上具有高透射率和防止光纤末端的反向散射(其可能导致距离测量误差)的优点。另外,光导的一般缺点是它们不保持偏振。
可选地,全息图可以枢转进出光束路径20。这在具有最小可能发散度的衍射限制激光束中特别有利。在枢转出状态下,发射光束10的发散度不会增加,因此目标物体上的光斑具有尽可能小的范围。相比之下,如果DOE已经枢转入测量光束10,那么光束的发散度同时增加并均匀化,其在诸如目标标记或反向反射器的反射目标上实现高测量准确度。
DOE 30在此例如以光学漫射器和/或全息图的形式具体实施或者利用复制技术生成。作为另一选项,DOE 30由玻璃、塑料或其组合构成。而且,DOE 30可以采用为具有衍射结构的折射透镜的混合透镜的形式具体实施。而且,DOE 30可选地被具体实施用于抑制零阶衍射或大于一阶的衍射。
作为另一选项,DOE 30保持偏振,结果,可以定义和获知测量光束10的偏振,结果是在这种情况下,返回光束11的偏振也是已知的,其例如提供了关于对入射光进行滤波的优点或者可以省略偏振无关分束器。这里,在此提供的光束路径20或光学元件可以总体上被具体实施成使得保持测量光束10的偏振。
在另一实施方式中,可以一个接一个地布置两个DOE。由此,特别是在近场中实现了更高程度的光束均匀化。而且,可以将衍射光学有效层施加在厚度仅为几毫米的公共承载板的两侧上。这使得DOE具有紧凑的安装尺寸,并且不仅在大物距而且甚至在短物距的情况下具有强烈的均匀化效果。
根据本发明,所提到的DOE或者如图所示的另一DOE 30也可以存在,以供均匀化自动目标识别系统(ATR)的目标识别光束。在所示实施方式中,具有ATR光源12的光束路径20a具有另一个DOE 30,根据本发明,其可以可选地或附加地存在。区域传感器13充当ATR的位置敏感或方向敏感传感器,并且例如以PSD传感器的形式具体实施,或者具体实施为CCD或CMOS图像传感器。
如果存在多个光源55、12,那么根据本发明,单个DOE 30也可以用于均匀化相应测量光束10、10a,或者对于单个光源或单个测量光束,具有DOE 30的公共光束路径20例如可以用于距离测量和自动目标识别。
还示出了测量辐射10的参照光分量10r,其经由装置内部参照部分被引导至测量光接收器56,结果,可以实现根据飞行时间原理的距离测量。
由于测距仪如上所述是同轴构造的测距仪,因而测量辐射10的光束路径(这里还示出了光源12的目标照射辐射)被镜像到物镜6的光轴上,并因此被镜像到装置的目标轴9上。因此,在该示例中的物镜6还用作接收光学单元。测量光10或其至少一部分现在被目标物体40反射回来。在所示情况下,目标物体40以反向反射器的形式具体实施。
后向反射和接收的测量光11指向EDM的检测元件56(例如,光电二极管),这可以例如通过波长选择性偏转来实现。因此,在框58中,将检测到的光信号被准备为电信号,并且距离测量单元59确定测量装置与目标物体之间的距离,例如,采用飞行时间测量、相位测量、信号形式评估或这些原理的组合的形式。
该示例中的接收光束路径也被引导到例如具有CCD或CMOS图像传感器或PSD但也可以或另外作为RIM传感器的摄像机13上,并且引导至目镜5。
图2b示出了作为根据图2a的另选例的一实施方式的部分,其中,光学距离测量辐射的发射相对于测量装置的目标轴方向9双轴进行。因此,具有用于发射测量辐射10的DOE30的发射光束路径的光轴明显偏离用于接收测量辐射11的物镜50的接收光束路径,测量辐射11由目标物体40反射回来并例如经由利用如所示在每种情况下彼此紧邻布置的专用光学单元50、30将其引导至具有目标轴9的检测器56。DOE 30作为自由光束元件布置在光学光束路径20中,即,测量光束10作为自由光束传播(至少在通过DOE 30之后,但优选沿整个光束路径20)。经由DOE 30,测量光束10被均匀化,使得减少或消除不均一性。具体来说,测量光束10的时间和方向依赖不均匀性(诸如可能存在的时间相位、强度以及任何辐射模式的不均匀性)通过DOE 30减少或消除。由用于发射测量辐射10的辐射源55和DOE 30构成的布置也可以绕目标轴9轴对称地布置在多种实施方式中,结果,首先增加了目标物体的辐照度,其次,另外改善了测量辐射11的均匀化。
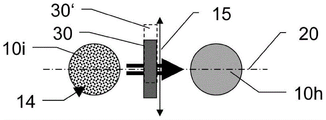
图3a示出了利用DOE 30的根据本发明的测量光束均匀化的示例。在该示例中,执行斑点的补偿或者来自激光二极管的激光束10i的调制波前的自适应(在相对于光束路径20旋转大约90°的横截面中示出),使得在通过DOE之后的光束10h不再表现出这些变化或者使它们表现出显著降低的程度。
图3b示出了进一步改进的实施方式。在根据图3a的实施方式的开发中,这里,DOE30可移动地布置在光束路径20中(在图中由虚线表示30'在相对于光束路径20的第二位置中指示)。由于DOE 30利用垂直于光束路径20或测量光束10i的传播轴的对应致动器(未例示)进行循环或周期性移动15,因而实现进一步模糊斑点效应或混合测量光束10i。这种振动对移动幅度而言可能非常低,并且对于测量光束的其它类型的均匀化也是如此,但是以更大频率实现,特别是以这样的幅度和频率实现,幅度足以混合测量光束或使斑点模糊,并且频率足够快以在测量期间或在针对测量值形成被求平均的多个测量结果中获得斑点的平均值。
图3c以横截面示出了根据图3b的实施方式的另选例。在此,经由DOE 30相对于测量光束10旋转,实现DOE 30和测量光束10的相对位置的动态变化并因此实现测量光束10的改善均匀化,其中,例如利用马达直接通过旋转轴16或间接通过对应传动元件(未示出)来实现旋转。在该示例中,旋转轴16相对于光束轴17偏移,结果是实现了偏心旋转。代替同向旋转的旋转移动18,如所示,可以另选地实现DOE 30相对于测量光束的振荡移动。在此,旋转移动同样快速地进行,使得在距离或方向测量的测量时间期间获得光束10的充分均匀化或混合。
作为另一另选例,关于根据图3b和图3c的实施方式,DOE 30不是在光束路径中移动,而是测量光束相对于DOE 30的相对移动通过移动测量光束来实现,例如,通过连接在上游的可变光学元件或者通过光源本身的变化/移动。
在另一实施方式中,DOE 30可以枢转进出光束路径20。在枢转入状态下,其可以静态地布置或者在光束路径20上以循环移动15、18位移。
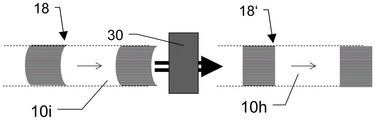
图4示出了脉冲发射辐射的强度的调制波前的自适应,作为根据本发明的均匀化的另一示例。诸如测距仪、ATR或目标搜索单元的光电装置通常利用时间调制的发送光束进行操作。这种测量装置的测量准确度格外受所使用的辐射10的调制或强度波前18的均匀度或均匀性影响。由于根据本发明的DOE 30,因而实现调制波前18的均匀化,特别是,在目标物体处或远场中生成所发射光学辐射的平滑调制波前18’,或者使调制波前为不同所需形式,例如水平并因此均匀形式。除了调制波前18的静态平滑化之外,后者也可以被动态平滑化,其中,测量准确度的提高是基于随时间的求平均而产生的。
图5示出了在光束路径中使用DOE 30的根据本发明的均匀化的另一示例。在该示例中,DOE 30被具体实施成使得实现光束轮廓的均匀化,其中,输入光束10i在这里展示出高斯轮廓19g,这是激光源的典型特征。光脉冲10i因此在其通过DOE 30之前具有不均匀形式或空间不均匀强度分布。这例如这会产生这样的影响:根据光脉冲10i和目标物体的空间取向,或根据目标物体上的入射点,测量出不同飞行时间,因为例如脉冲的峰值比边缘区域更早入射,这对于高度准确的测量是不利的。经由根据本发明的DOE 30,输入光束轮廓10g现在被成形为形成具有方形轮廓或顶帽轮廓19t的均匀测量脉冲10h,其表示具有均一强度分布的均匀光束轮廓。这对于远场测量尤其有利,即,测量光束的角度发散度变为主导或占主导,或者光束发散度(显著)超过测量光束的起始/出射直径。
图6像图3a和图3b一样,按一种类型的例示图示出了根据本发明的激光束10i的不同发散角补偿的示例,该激光束10i由半导体光源发射并在根据本发明的测量装置中被用作用于测量目的的光学辐射。例如,当边缘发射器用作辐射源时,发生根据方向而变化的发散。经由根据本发明在测量装置中使用的DOE 30,可以实现光束修改,以便在轴依赖性方面补偿光束发散,使得光束横截面如图所示从椭圆形到圆形均匀化。在该处理中,光束横截面的变换不是通过简单的圆柱变焦来执行的,而是通过在光束横截面上混合表面元件来执行的,以使获取调制激光辐射的强度和飞行时间波前的平滑化。
图7a和图7b示出了根据本发明使用DOE 30用于生成发散测量光束10d并在发散测量光束10d与准直测量光束10k之间自动切换。在图7a中,DOE 30例如以全息图的形式具体实施在瞄准单元3中的第一位置(仅部分地示出),使得其被布置在光束路径20中并且修改由辐射源55发射的光束。该示例中的DOE 30被具体实施并布置成使得除了使测量光束10均匀化之外DOE还修改测量光束,以使其作为发散光束10d入射在目标物体40上。如图所示,这样的发散光束10d在诸如反向反射膜或三棱镜的协作目标40中采用。
这里有利地实现发散修改,使得接收光学单元6'(仅作为示例配置,与作为分离单元的图2a的示例形成对比)被返回测量光束11(的分量)最佳地照亮,即,接收测量光束11的横截面完全照亮所述接收光学单元6',其中,另一方面,测量光束11的该有效分量经由在协作目标物体40处的反射从发散光束10d的均匀化分量中切出。
在图7b中,DOE 30位于第二位置P2,使得仅实现光束10的均匀化,结果是光束10作为准直测量光束10k离开瞄准单元3,例如对于非协作目标40来说通常是必要的。为此,DOE30例如被划分成两个不同区域或区段,其中一个区域仅实现均匀化,而另一区域实现均匀化和发散发射。例如,基于自动目标识别,在此自动实现位置从P1到P2的变化,从而实现从发散到准直的切换,反之亦然。
DOE还可以设置有另一些区域,这些区域例如经由所生成的光束发散而不同。作为光束路径20对于DOE 30的位置变化的另选例,如所示,DOE 30例如可以通过按以下方式旋转来改变其相对于光束路径20的位置:根据DOE 30的旋转位置,所发射测量光束穿过不同发散区段,因此经历不同(包括没有)发散修改。作为另一选项,代替具有一个DOE 30,瞄准单元3具有至少两个衍射光学元件,其中第一个DOE仅均匀化,而第二个DOE仅生成发散,并且如果需要,则被枢转到光束路径20中。另选地,第一个DOE仅被具体实施用于均匀化,而第二个DOE实现两个功能,结果是,例如,第二个DOE枢转进入而第一个DOE枢转出以进行目标识别,而相反的情况发生在距离测量中。根据同样的原理,瞄准单元3可以具有多个衍射光学元件,用于不同发散生成,例如,用于距离测量和目标识别,它们能够以交替方式引入光束路径20中。针对这种交替引入,这些元件例如被布置在移位机构或旋转机构(例如镜头转台(turret))中。
作为另一另选例(未示出),DOE 30能够完全从光束路径20枢转出来以进行无反射器测量(或者测量光束可完全绕DOE 30偏转),使得DOE 30不修改用于这种类型测量的测量光束。根据实施方式和测量任务,光束均匀化可能仅对测量协作目标40是必要的,即,DOE30只需要根据目标类型或测量任务,因情况而不同地布置在光束路径中。在设计用于测量两种目标类型(即,协作和非协作)的测量装置中,DOE 30因此可选地不是固定布置在光束路径20中,而是可布置在光束路径中以用于不同情况均匀化,并且可能生成发散光束10d(例如,经由用于枢转进出的装置或用于改变光束路径的装置)。
要明白的是,这些例示图仅示意性地例示了可能的示例性实施方式。除非另外加以指明,不同方法既可以彼此组合也可以与根据现有技术的方法和测量装置相组合。
Claims (39)
1.一种对协作目标物体(40)进行协调测量的光学测量装置(1),所述光学测量装置具有:至少一个光源(55),所述至少一个光源用于生成至少一个时间调制的光学测量光束(10、10i、10h、10d);以及瞄准单元(3),所述瞄准单元能够绕至少一个轴相对于所述光学测量装置(1)的基座旋转,其中,所述瞄准单元(3)
·定义用于瞄准待测量的协作目标物体(40)的目标轴(9),并且
·具有用于沿待测量的协作目标物体(40)的方向发射所述光学测量光束(10、10i、10h、10d)的光束路径(20),
其特征在于
所述瞄准单元(3)具有至少一个保持偏振的衍射光学元件(30),其中,所述至少一个保持偏振的衍射光学元件(30)被具体实施用于均匀化所述光学测量光束(10、10i、10h、10d)内的时间和空间强度分布,通过混合所述光学测量光束来均匀化所述光学测量光束(10、10i、10h、10d)在物体空间中的模式,并且均匀化所述光学测量光束(10、10i、10h、10d)的脉冲的飞行时间,并且被布置或能够布置在所述光束路径(20、20a)中,使得所述光学测量光束(10、10i、10h、10d)在利用所述衍射光学元件(30)发射之前被均匀化,
其中,为了时间均匀化,通过以下方式使所述光学测量光束(10、10i、10h、10d)和所述衍射光学元件(30)的相对位置周期性地变化:所述衍射光学元件(30)被布置成或能够可移动地布置在所述光束路径(20、20a)中,使得所述衍射光学元件(30)能够在整个所述光学测量光束(10、10i、10h、10d)上动态地移动。
2.根据权利要求1所述的光学测量装置(1),
其特征在于
所述光学测量装置(1)是经纬仪、全站仪、激光扫描仪或激光跟踪仪。
3.根据权利要求1所述的光学测量装置(1),
其特征在于
所述至少一个光源(55)是激光光源。
4.根据权利要求1所述的光学测量装置(1),
其特征在于
所述至少一个光学测量光束(10、10i、10h、10d)是脉冲测量光束。
5.根据权利要求1所述的光学测量装置(1),
其特征在于
所述瞄准单元(3)能够绕绕至少两个轴(7、8)相对于所述光学测量装置(1)的基座旋转。
6.根据权利要求1所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)被具体实施用于混合所述光学测量光束(10、10i、10h、10d)。
7.根据权利要求6所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)被具体实施用于生成一个接一个布置的多个至少部分重叠的部分光束。
8.根据权利要求1所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)被具体实施用于均匀化
·
·所述光学测量光束(10、10i、10h、10d)的波前(18),和/或
·所述光源(55、12)在远场中的成像。
9.根据权利要求8所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)被具体实施用于平滑化或调平所述光学测量光束(10、10i、10h、10d)的波前(18)。
10.根据权利要求1所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)
·能够振动,和/或
·能够旋转。
11.根据权利要求10所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)能够垂直于所述光学测量光束(10、10i、10h、10d)的传播轴振动。
12.根据权利要求10所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)能够以一偏心率和/或绕所述光学测量光束(10、10i、10h、10d)的传播轴或者具有相对于所述光学测量光束的传播轴的平行偏移的轴旋转。
13.根据权利要求1所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)
·被布置成相对于所述光学测量光束(10、10i、10h、10d)能够枢转入和枢转出,和/或
·具有不同均匀化的区域并且相对于所述光学测量光束(10、10i、10h、10d)能够不同地布置,其特征在于,所述光学测量光束(10、10i、10h、10d)根据所述布置被不同地均匀化。
14.根据权利要求1所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)被具体实施
·用于改变所述光学测量光束(10、10i、10h、10d)在远场中和/或从高斯光束轮廓开始的光束轮廓(19g),和/或用于生成顶帽状光束轮廓,和/或
·用于减少或消除所述光学测量光束(10、10i、10h、10d)的时间和/或方向依赖不均匀性。
15.根据权利要求14所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)被具体实施用于减少或消除所述光学测量光束(10、10i、10h、10d)的强度不均匀性。
16.根据权利要求1所述的光学测量装置(1),
其特征在于
至少一个另外衍射光学元件被布置或能够布置在所述光束路径(20、20a)中,所述至少一个另外衍射光学元件被具体实施用于均匀化所述光学测量光束(10、10i、10h、10d)。
17.根据权利要求1所述的光学测量装置(1),其特征在于
所述衍射光学元件(30)被具体实施用于将所述光学测量光束(10、10i、10h、10d)重新成形为发散测量光束(10d),
·所述发散测量光束(10d)具有发散角,所述发散角匹配至所述瞄准单元(3)的接收光学单元(6、6’)的视场,和/或
·其中,能够执行在发散与准直之间自动切换所述光束路径(20、20a)的轴向聚焦。
18.根据权利要求17所述的光学测量装置(1),
其特征在于
所述发散角为至多3°。
19.根据权利要求17所述的光学测量装置(1),
其特征在于
所述发散角为0.075°、0.1°、0.2°或1.5°。
20.根据权利要求1所述的光学测量装置(1),
其特征在于
·所述瞄准单元被这样具体实施,并且所述衍射光学元件(30)被布置在所述瞄准单元(3)中,使得来自所述衍射光学元件(30)的所述光学测量光束(10、10i、10h、10d)作为自由光束传播,和/或
·所述光束路径(20)是无光导的,和/或
·所述光源(55、12)是激光二极管,和/或
·所述光学测量装置(1)具有光电子测距仪,其中,所述光学测量光束(10、10i、10h、10d)适于利用所述光电子测距仪确定距所述目标物体(40)的距离,和/或
·所述光学测量装置(1)具有利用光学发散目标识别光束的自动目标识别,并且所述衍射光学元件(30)被以使得所述目标识别光束在发射之前被均匀化的方式具体实施并且布置在所述目标识别光束的光束路径(20a)中。
21.根据权利要求20所述的光学测量装置(1),
其特征在于
所述激光二极管被具体实施为边缘发射器。
22.根据权利要求20所述的光学测量装置(1),
其特征在于
所述自动目标识别用于确定相对于所述目标物体(40)的角度。
23.根据权利要求1所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)
·按光学漫射器的形式具体实施,和/或
·通过复制技术生成,其中,所述衍射光学元件具有经由复制技术施加的涂层材料,和/或
·由玻璃、塑料或玻璃与塑料的组合构成,和/或
·按全息图的形式具体实施,和/或
·具体实施为由具有衍射结构的折射透镜制成的混合透镜。
24.根据前述权利要求23所述的光学测量装置(1),
其特征在于
所述衍射光学元件(30)具有至多3°的散射角。
25.根据前述权利要求23所述的光学测量装置(1),
其特征在于
所述涂层材料具有小于0.15mm的层厚度。
26.根据前述权利要求23所述的光学测量装置(1),
其特征在于
所述涂层材料具有小于0.05mm的层厚度。
27.根据前述权利要求23所述的光学测量装置(1),
其特征在于
所述玻璃是冕玻璃。
28.根据前述权利要求23所述的光学测量装置(1),
其特征在于
所述全息图是结构全息图。
29.根据前述权利要求23所述的光学测量装置(1),
其特征在于
所述折射透镜是非球面的或球面的透镜。
30.根据权利要求1所述的光学测量装置(1),其特征在于
所述衍射光学元件(30)被具体实施用于以更高阶衍射的剩余强度具有总体强度的不到5%的比例,通过在针对零阶衍射和/或大于一的衍射级的衍射情况下生成大散射圆,来抑制零阶衍射和/或大于一的衍射级。
31.一种利用光学测量装置(1)对协作目标物体(40)进行协调测量的方法,其中,使所述协作目标物体(40)与瞄准单元(3)的瞄准轴(9)瞄准,其中,在所述协作目标物体(40)的方向上,沿着第一光束路径(20、20a)发射时间调制的光学测量辐射(10、10h、10d)作为测量光束来实现瞄准
其特征在于
在利用处于所述第一光束路径(20、20a)中的至少一个保持偏振的衍射光学元件(30)发射之前,均匀化光学测量光束(10、10i、10h、10d)内的时间和/或空间强度分布,通过混合所述光学测量光束来均匀化所述光学测量光束(10、10i、10h、10d)在物体空间中的模式,并且均匀化所述光学测量光束(10、10i、10h、10d)的脉冲的飞行时间,
其中,为了时间均匀化,通过以下方式使所述光学测量光束(10、10i、10h、10d)和所述衍射光学元件(30)的相对位置周期性地变化:所述衍射光学元件(30)被布置成或能够可移动地布置在所述光束路径(20、20a)中,使得所述衍射光学元件(30)能够在整个所述光学测量光束(10、10i、10h、10d)上动态地移动。
32.根据权利要求31所述的方法,
其特征在于
所述光学测量装置(1)是经纬仪、全站仪、激光扫描仪或激光跟踪仪。
33.根据权利要求31所述的方法,
其特征在于
所述目标物体(40)是放置在远场中的所述目标物体。
34.根据权利要求31所述的方法,
其特征在于
所述光学测量辐射(10、10h、10d)是脉冲和/或发散测量辐射。
35.根据权利要求31所述的方法,
其特征在于
所述光学测量辐射是激光辐射。
36.根据权利要求31所述的方法,
其特征在于
在利用处于所述第一光束路径(20、20a)中的至少一个衍射光学元件(30)发射之前,将所述光学测量辐射(10、10i、10h、10d)时间和/或空间均匀化。
37.根据权利要求31所述的方法,
其特征在于
均匀化意指使
·所述光学测量辐射(10、10i、10h、10d)的波前一致。
38.根据权利要求37所述的方法,
其特征在于
均匀化意指使所述光学测量辐射(10、10i、10h、10d)的波前平滑化或调平。
39.一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序用于执行根据权利要求31至38中的任一项所述的方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17209646.3A EP3502617B1 (de) | 2017-12-21 | 2017-12-21 | Vermessungsgerät mit messstrahlhomogenisierung |
| EP17209646.3 | 2017-12-21 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110030969A CN110030969A (zh) | 2019-07-19 |
| CN110030969B true CN110030969B (zh) | 2022-05-24 |
Family
ID=60781916
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811493532.8A Active CN110030969B (zh) | 2017-12-21 | 2018-12-07 | 光学测量装置、利用其协调目标物体的方法和存储介质 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11703591B2 (zh) |
| EP (1) | EP3502617B1 (zh) |
| CN (1) | CN110030969B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11733043B2 (en) * | 2019-05-06 | 2023-08-22 | Hexagon Technology Center Gmbh | Automatic locating of target marks |
| EP3869152B1 (en) | 2020-02-18 | 2023-11-08 | Hexagon Technology Center GmbH | Surveying device with a coaxial beam deflection element |
| EP4332495A1 (en) * | 2022-09-01 | 2024-03-06 | Leica Geosystems AG | Measuring instrument with a scanning absolute distance meter |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1459033A (zh) * | 2001-03-09 | 2003-11-26 | 索尼公司 | 衍射透镜元件和使用该元件的照明装置 |
| CN1731238A (zh) * | 2004-08-05 | 2006-02-08 | 三星电子株式会社 | 能够消除激光散斑的照明系统及采用其的投影系统 |
| CN1987518A (zh) * | 2005-12-20 | 2007-06-27 | 株式会社拓普康 | 距离测定方法以及距离测定装置 |
| CN101923186A (zh) * | 2010-09-10 | 2010-12-22 | 福建师范大学 | 具有消除激光散斑功能的投影系统 |
| CN102680983A (zh) * | 2006-01-13 | 2012-09-19 | 莱卡地球系统公开股份有限公司 | 坐标测量设备 |
| CN102803987A (zh) * | 2009-06-23 | 2012-11-28 | 莱卡地球系统公开股份有限公司 | 坐标测量设备 |
| CN104101335A (zh) * | 2013-04-12 | 2014-10-15 | 赫克斯冈技术中心 | 测绘装置、利用其测绘目标物体的方法和计算机程序产品 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3748112B2 (ja) | 1993-09-16 | 2006-02-22 | 株式会社トプコン | 測量機 |
| JP4328917B2 (ja) * | 1998-11-27 | 2009-09-09 | 株式会社トプコン | 光波距離計 |
| EP1043603A1 (de) | 1999-04-06 | 2000-10-11 | Leica Geosystems AG | Verfahren zur Messung der Entfernung mindestens eines Ziels |
| EP1043602B1 (de) | 1999-04-06 | 2003-02-05 | Leica Geosystems AG | Verfahren zur Messung der Entfernung mindestens eines Ziels |
| DE19922341C2 (de) | 1999-05-14 | 2002-08-29 | Zsp Geodaetische Sys Gmbh | Verfahren und eine Anordnung zur Bestimmung der räumlichen Koordinaten mindestens eines Objektpunktes |
| AU7953201A (en) | 2000-08-25 | 2002-03-04 | Kurt Giger | Method and device for measuring distances |
| JP3892704B2 (ja) | 2001-10-30 | 2007-03-14 | ペンタックス株式会社 | 光波測距儀 |
| JP4166083B2 (ja) * | 2002-12-26 | 2008-10-15 | 株式会社トプコン | 測距装置 |
| EP1450128A1 (de) | 2003-02-19 | 2004-08-25 | Leica Geosystems AG | Verfahren und Vorrichtung zur Ableitung geodätischer Entfernungsinformationen |
| KR100644644B1 (ko) | 2004-10-28 | 2006-11-10 | 삼성전자주식회사 | 레이저 반점을 제거한 조명계 및 이를 채용한 1 패널식프로젝션 시스템 |
| EP1672383A1 (de) | 2004-12-18 | 2006-06-21 | Leica Geosystems AG | Elektronisches Messverfahren |
| EP1757956A1 (de) | 2005-08-24 | 2007-02-28 | Leica Geosystems AG | Mehrzielfähiges Distanzmessverfahren nach dem Phasenmessprinzip |
| US7933451B2 (en) | 2005-11-23 | 2011-04-26 | Leica Geosystems Ag | Feature extraction using pixel-level and object-level analysis |
| EP1882959A1 (de) | 2006-07-17 | 2008-01-30 | Leica Geosystems AG | Optisches Distanzmessverfahren und entsprechender optischer Distanzmesser |
| EP1882899A1 (de) * | 2006-07-17 | 2008-01-30 | Leica Geosystems AG | Elektrooptischer Entfernungsmesser |
| US7609746B2 (en) * | 2006-12-01 | 2009-10-27 | Seiko Epson Corporation | Light source device, image display device, projector, illumination device, and monitor device |
| TW201007393A (en) * | 2008-07-21 | 2010-02-16 | Seereal Technologies Sa | Light modulating device |
| DE102011003145A1 (de) * | 2010-02-09 | 2011-08-11 | Carl Zeiss SMT GmbH, 73447 | Optisches System mit Blendeneinrichtung |
| CN102834691B (zh) | 2010-05-10 | 2015-05-20 | 莱卡地球系统公开股份有限公司 | 测绘方法 |
| US10466359B2 (en) * | 2013-01-01 | 2019-11-05 | Inuitive Ltd. | Method and system for light patterning and imaging |
| DE102015115064A1 (de) * | 2015-09-08 | 2017-03-09 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Beleuchtungseinheit und Vorrichtung zur lithografischen Belichtung |
| KR20200028446A (ko) * | 2017-08-31 | 2020-03-16 | 에스지 디제이아이 테크놀러지 코., 엘티디 | 고체 상태 광 검출 및 레인징(lidar) 시스템, 그리고 고체 상태 광 검출 및 레이징(lidar) 분해능을 향상시키는 시스템 및 방법 |
-
2017
- 2017-12-21 EP EP17209646.3A patent/EP3502617B1/de active Active
-
2018
- 2018-11-26 US US16/200,440 patent/US11703591B2/en active Active
- 2018-12-07 CN CN201811493532.8A patent/CN110030969B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1459033A (zh) * | 2001-03-09 | 2003-11-26 | 索尼公司 | 衍射透镜元件和使用该元件的照明装置 |
| CN1731238A (zh) * | 2004-08-05 | 2006-02-08 | 三星电子株式会社 | 能够消除激光散斑的照明系统及采用其的投影系统 |
| CN1987518A (zh) * | 2005-12-20 | 2007-06-27 | 株式会社拓普康 | 距离测定方法以及距离测定装置 |
| CN102680983A (zh) * | 2006-01-13 | 2012-09-19 | 莱卡地球系统公开股份有限公司 | 坐标测量设备 |
| CN102803987A (zh) * | 2009-06-23 | 2012-11-28 | 莱卡地球系统公开股份有限公司 | 坐标测量设备 |
| CN101923186A (zh) * | 2010-09-10 | 2010-12-22 | 福建师范大学 | 具有消除激光散斑功能的投影系统 |
| CN104101335A (zh) * | 2013-04-12 | 2014-10-15 | 赫克斯冈技术中心 | 测绘装置、利用其测绘目标物体的方法和计算机程序产品 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3502617A1 (de) | 2019-06-26 |
| EP3502617B1 (de) | 2021-10-20 |
| CN110030969A (zh) | 2019-07-19 |
| US11703591B2 (en) | 2023-07-18 |
| US20190196017A1 (en) | 2019-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10444361B2 (en) | Laser tracker having two measurement functionalities | |
| US9766326B2 (en) | Laser tracker with calibration unit for self-calibration | |
| US10054439B2 (en) | Reflector arrangement with retroreflector and with a sensor arrangement for inclination determination and calibration | |
| US9658059B2 (en) | Measuring device having a scanning functionality and a single-point measurement mode | |
| US9638519B2 (en) | Method for determining a change in distance to a movable and reflective target by means of interferometer to determine if the movement of the reflective target is really executable | |
| US9945938B2 (en) | Self-calibrating laser tracker and self-calibration method | |
| US6411371B1 (en) | Device for optical distance measurement | |
| US10126415B2 (en) | Probe that cooperates with a laser tracker to measure six degrees of freedom | |
| US11372088B2 (en) | Optical distance meter having switchable receiving aperture | |
| US9645239B2 (en) | Laser tracker comprising interferometer and absolute distance measuring unit, and calibration method for a laser tracker | |
| US8724108B2 (en) | Photoelectric autocollimation method and apparatus based on beam drift compensation | |
| CN110030969B (zh) | 光学测量装置、利用其协调目标物体的方法和存储介质 | |
| EP1407291A2 (en) | Chopper-stabilized absolute distance meter | |
| CN109520425B (zh) | 一种精跟踪误差测试装置及测试方法 | |
| US11933632B2 (en) | Surveying device with a coaxial beam deflection element | |
| JP6198154B2 (ja) | 測定デバイス、システムおよび方法 | |
| US9927229B2 (en) | Measuring device and tilt sensor | |
| US20130215435A1 (en) | Measuring unit, measuring system and method for determining a relative position and relative orientation | |
| US20220011106A1 (en) | Edm close range | |
| RU2292566C1 (ru) | Многофункциональная оптико-локационная система | |
| KR20130037428A (ko) | 도플러 라이다 장치 및 도플러 라이다 장치의 동작 방법 | |
| US20240230904A9 (en) | Laser tracker having two measurement functionalities and fmcw distance measurement | |
| US20190285398A1 (en) | Method and device for determining the spatial position of an object by means of interferometric length measurement | |
| EP3839566A1 (en) | Geodetic surveying device for measuring scenes comprising natural and artificial targets | |
| RU2442997C2 (ru) | Способ измерения дальности и оптико-электронная система (оэс) поиска и сопровождения (варианты) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |