CN109297409B - Battery displacement identification and positioning device and method - Google Patents
Battery displacement identification and positioning device and method Download PDFInfo
- Publication number
- CN109297409B CN109297409B CN201811238786.5A CN201811238786A CN109297409B CN 109297409 B CN109297409 B CN 109297409B CN 201811238786 A CN201811238786 A CN 201811238786A CN 109297409 B CN109297409 B CN 109297409B
- Authority
- CN
- China
- Prior art keywords
- battery
- dot
- coordinates
- target
- coordinate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
The invention provides a battery displacement identification and positioning device which comprises a battery compartment, a dot calibration plate, a grabbing component for carrying a battery and an image acquisition component for acquiring battery position information and battery compartment position information, wherein the image acquisition component is arranged below the grabbing component, the dot calibration plate is arranged on the grabbing component and is positioned in an acquisition range above the image acquisition component, the grabbing component adjusts the position of the battery to correspond to the position of the battery compartment, and the position of the battery after adjustment is calculated by taking dots on the dot calibration plate as base points. When a coordinate system is established, the position of the battery after adjustment is directly calculated through the relation between the coordinates of the base point and the position of the battery, and the position of the battery after adjustment is moved to be overlapped with the position of the battery bin through the grabbing assembly, so that the displacement of the battery can be identified and positioned only by taking a picture once, and the production efficiency is improved.
Description
Technical Field
The invention relates to the technical field of battery assembly, in particular to a battery displacement identification and positioning device and a battery displacement identification and positioning method.
Background
At present, a double-station double-camera positioning and identifying system is adopted on a battery assembly production line. Firstly, selecting a point on a battery for positioning, performing positioning photographing for the first time to obtain a coordinate point (X1, Y1) of the point, selecting the upper edge of the battery, and comparing the upper edge of the battery with a horizontal line to obtain an offset angle theta 1; then, a reference point and an edge are selected from the same position of the battery compartment for positioning, and a second photographing is performed to obtain coordinates (X2, Y2) and an offset angle theta 2. The positioning of the two positions can be directly obtained by (X, Y) coordinates, and the positioning of the angle is realized by rotating a matrix. When the deflection angle of the battery is rotated to the angle of theta 2 from theta 1, the (X1, Y1) of the battery is changed necessarily, a new coordinate point (X3, Y3) is obtained by positioning the battery through third photographing, and the new coordinate point (X3, Y3) is adjusted to be overlapped with the (X2, Y2), so that the identification and positioning of the displacement of the battery can be completed.
In practical use, the time required for one-time photographing and image processing to movement of the manipulator is about 1 second, which seriously affects the production tact of the equipment, thereby reducing the production efficiency. The above process needs two times of photographing, and has low speed and low efficiency.
Disclosure of Invention
The invention mainly aims to provide a battery displacement identification and positioning device, and aims to solve the problems that in the prior art, two times of photographing are needed when a battery is positioned, the speed is low, and the efficiency is low.
In order to achieve the above object, the present invention provides a battery displacement identification and positioning device, including: location platform, battery compartment, dot calibration board, be used for carrying snatching the subassembly and being used for gathering of battery positional information with the image acquisition subassembly of battery compartment positional information, the battery compartment reaches it set up in to snatch the subassembly in the location bench, the image acquisition subassembly set up in snatch the subassembly below, the dot calibration board set up in on the subassembly, just the dot calibration board is located in the collection scope of image acquisition subassembly top, it with to snatch the subassembly dot on the dot calibration board is calculated as the basic point the battery adjusts to corresponding position behind the battery compartment, and will the battery position removes to corresponding the position of battery compartment.
Preferably, the grasping assembly includes: the support can make rotary motion by taking the round points on the round point calibration plate as the circle center, and the support drives the batteries on the clamping piece to rotate when rotating.
Preferably, the dot calibration plate is made of a film plate through laser printing.
Preferably, the image acquisition assembly comprises a positioning camera and a light source, the positioning camera is arranged at the top of the bracket, and the light source is arranged below the positioning camera.
In addition, in order to achieve the above object, the present invention further provides a method for identifying and positioning battery displacement, where the method for identifying and positioning battery displacement includes:
acquiring a battery compartment position of a battery compartment, and setting the battery compartment position as a target position;
collecting the battery position of a battery and dot coordinates on a dot calibration board, and judging whether the battery position is consistent with the target position;
when the battery position is inconsistent with the target position, adjusting the battery to the target position according to the battery position, the target position and the dot coordinates;
and controlling a grabbing assembly to place the battery into the battery bin.
Preferably, when the battery position is inconsistent with the target position, the step of adjusting the battery to the target position according to the battery position, the target position and the dot coordinates includes:
determining a deviation angle between the battery and the battery bin according to the battery position of the battery and the target position of the battery bin;
adjusting the angle information of the battery according to the deviation angle;
and adjusting the battery to the target position according to the battery position, the deviation angle and the dot coordinate.
Preferably, the step of determining the deviation angle of the battery from the battery compartment according to the battery position of the battery and the target position of the battery compartment comprises:
acquiring the position of the edge of the battery in a coordinate system and the position of the corresponding edge on the battery bin in the coordinate system through image analysis;
acquiring a first included angle between the edge of the battery and the X axis of the coordinate system and a second included angle between the corresponding edge of the battery bin and the X axis of the coordinate system through image analysis;
and the difference value of the first included angle and the second included angle is the deviation angle.
Preferably, the step of adjusting the battery to the target position according to the battery position, the deviation angle and a preset dot coordinate includes:
calculating the offset of the battery on an X axis and a Y axis in a coordinate system when the battery is adjusted from the battery position to the target position according to the deviation angle and the dot coordinates;
and the sum of the battery position and the offset of the battery on the X axis and the Y axis in the coordinate system is the target position.
According to the technical scheme, when a coordinate system is established, a base point is arranged on the grabbing component, the grabbing component directly calculates the position of the battery after adjustment according to the relation between the coordinate of the base point and the position of the battery in the process of adjusting the position of the battery to be corresponding to the position of the battery bin, and then the grabbing component moves the position of the battery after adjustment to be overlapped with the position of the battery bin, so that the displacement of the battery can be identified and positioned only by taking a picture once, the production beat is saved, and the production efficiency is improved.
Drawings
In order to more clearly illustrate the embodiments of the present invention or the technical solutions in the prior art, the drawings used in the description of the embodiments or the prior art will be briefly described below, it is obvious that the drawings in the following description are only some embodiments of the present invention, and for those skilled in the art, other drawings can be obtained according to the structures shown in the drawings without creative efforts.
Fig. 1 is a schematic flow chart of a first embodiment of a method for identifying and positioning battery displacement according to the present invention;
FIG. 2 is a schematic flow chart illustrating a second embodiment of a method for identifying and positioning battery displacement according to the present invention;
FIG. 3 is a schematic flow chart illustrating a third embodiment of a method for identifying and positioning battery displacement according to the present invention;
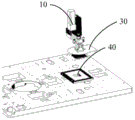
fig. 4 is a schematic structural diagram of a battery displacement recognition and positioning device according to the present invention.
The reference numbers illustrate:
| reference numerals | Name (R) | Reference numerals | Name (R) |
| 10 | Grabbing component | 20 | |
| 30 | Battery compartment |
The implementation, functional features and advantages of the objects of the present invention will be further explained with reference to the accompanying drawings.
Detailed Description
The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the drawings in the embodiments of the present invention, and it is obvious that the described embodiments are only a part of the embodiments of the present invention, and not all of the embodiments. All other embodiments, which can be derived by a person skilled in the art from the embodiments given herein without making any creative effort, shall fall within the protection scope of the present invention.
It should be noted that all the directional indicators (such as up, down, left, right, front, and rear … …) in the embodiment of the present invention are only used to explain the relative position relationship between the components, the movement situation, etc. in a specific posture (as shown in the drawing), and if the specific posture is changed, the directional indicator is changed accordingly.
In addition, the descriptions related to "first", "second", etc. in the present invention are for descriptive purposes only and are not to be construed as indicating or implying relative importance or implicitly indicating the number of technical features indicated. Thus, a feature defined as "first" or "second" may explicitly or implicitly include at least one such feature. In addition, technical solutions between various embodiments may be combined with each other, but must be realized by a person skilled in the art, and when the technical solutions are contradictory or cannot be realized, such a combination should not be considered to exist, and is not within the protection scope of the present invention.
The invention provides a battery displacement identifying and positioning device, which comprises: location platform, battery compartment 30, dot calibration board 20, be used for carrying the battery snatch subassembly 10 and be used for gathering battery positional information with the image acquisition subassembly of battery compartment positional information, the battery compartment reaches it set up in to snatch the subassembly in the location bench, the image acquisition subassembly set up in snatch the subassembly 10 below, dot calibration board 20 set up in on snatching subassembly 10, just dot calibration board 20 is located in the collection within range of image acquisition subassembly top, it uses to snatch subassembly 10 dot on the dot calibration board 20 is calculated as the basic point the battery adjusts to corresponding the position behind the battery compartment 30, and will the battery position remove to corresponding the position of battery compartment 30.
The image acquisition assembly can comprise a positioning piece, wherein the positioning piece is arranged above the battery compartment 30 and used for positioning and photographing the battery compartment 30, and a reference point is selected on the battery compartment 30 and the reference coordinate of the reference point is determined. Or before the grabbing component 10 grabs the battery from the external feeding mechanism, the battery bin 30 is positioned and photographed to obtain the reference coordinate of the reference point, so that the positioning piece is omitted for positioning and photographing the battery bin, the structure of the device is simplified, and the equipment cost is saved.
When the grabbing component 10 grabs the battery and moves to the upper part of the battery compartment, the image acquisition component shoots and positions the battery and the dots on the dot calibration plate 20, and then the battery position is adjusted by the grabbing component 10 to correspond to the battery compartment 30. For example, the image acquisition assembly takes a picture of the battery at a fixed position, two points are preset on the battery, the two preset points are respectively connected with the circular points on the circular point calibration plate 20, an included angle between the two straight lines is calculated, similarly, two corresponding reference points are selected from the battery bin 30, the included angle between the reference points and the connection line of the circular points is calculated, and when the two included angles are adjusted to be the same, it is determined that the position of the battery corresponds to the position of the battery bin 30. Or, the image acquisition assembly takes a picture of the battery at a fixed position, selects a preset point on the battery, obtains a preset coordinate of the preset point and an included angle between one edge of the battery and a reference straight line, similarly, selects a corresponding reference point and reference edge on the battery compartment 30, obtains a reference coordinate of the reference point and an included angle between the reference edge and the reference straight line, and determines that the battery position corresponds to the position of the battery compartment 30 when the two included angles are adjusted to be the same. In the above process, the new coordinates generated by the preset points after the battery is adjusted can be calculated by the coordinates of the dots on the dot calibration plate 20, the size of the rotated angle when the battery is adjusted, and the preset coordinates of the preset points on the battery before the adjustment, and finally the new coordinates generated by the preset points are moved to be overlapped with the reference coordinates of the reference points on the battery compartment 30 by the grabbing assembly 10, so that the battery can be placed in the battery compartment 30. Therefore, the displacement of the battery can be recognized and positioned only by taking a picture once, the production beat is saved, and the production efficiency is improved. In the above process, the connection line between the preset point and the reference point to the dot on the dot calibration board 20 is the projection of the preset point on the horizontal plane.
According to the technical scheme, when a coordinate system is established, a base point is arranged on the grabbing component 10, the grabbing component 10 directly calculates the position of the battery after adjustment according to the relation between the coordinates of the base point and the position of the battery in the process of adjusting the position of the battery to be corresponding to the position of the battery bin 30, and then the grabbing component 10 moves the position of the battery after adjustment to be overlapped with the position of the battery bin 30, so that the displacement of the battery can be identified and positioned only by taking a picture once, the production beat is saved, and the production efficiency is improved.
Specifically, the grasping assembly 10 includes: the battery clamping device comprises a support and a clamping part used for clamping a battery, wherein the clamping part is arranged at the bottom of the support, a dot calibration plate 20 is arranged above the clamping part, the support is driven to carry out nine-point calibration when moving so as to form a rotating matrix, the central point of the rotating matrix is the base point, and the support is driven to rotate the battery on the clamping part when rotating. The dots of the dot calibration plate 20 can be marked on the bracket or on any side of the bracket, and only the dot calibration plate 20 can be shot by the image acquisition assembly. After the clamping member clamps the battery, nine-point calibration is performed above the battery bin 30, that is, nine positions are moved, the image acquisition assembly shoots and positions the dot calibration plate on the support when the support moves by one position, and a conversion matrix is formed after the support completes the nine-point calibration, so that pixel coordinates obtained by shooting through the image acquisition assembly are converted into mechanical coordinates for controlling the movement of the grabbing assembly. After the mechanical coordinate is obtained, the bracket is controlled to drive the battery to move until a preset edge on the battery is adjusted to be parallel to a reference edge on the battery bin 30. It should be noted that, in the conversion matrix obtained by the nine-point calibration, a point at the center thereof may be set as a base point, so that the coordinates after the battery is rotated are calculated by the base point.
The clamping assembly can further comprise a universal piece, the clamping piece is arranged on the support through the universal piece, and the clamping piece can drive the battery to be adjusted on a horizontal plane under the action of the universal piece, so that the battery and the battery bin 30 are kept consistent in positions relative to the horizontal plane, the battery is prevented from inclining, and the identification and positioning accuracy of battery displacement is further improved.
As an example, the specific process and algorithm for adjusting the battery to the position of the battery compartment 30 is as follows: in practice, in order to optimize the algorithm, a deviation angle between the battery and the battery compartment 30 is usually calculated, and the rotated position of the battery is calculated according to the deviation angle.
Firstly, calculating the deviation angle between the battery and the battery bin 30, selecting a reference straight line on an image when photographing and positioning the battery, simultaneously selecting a certain edge on the battery, and obtaining the included angle between the edge and the reference straight line through the analysis of the image. For example, the length of the battery is selected, correspondingly, the length of the battery compartment 30 is also selected as a reference edge, an included angle between the reference edge and a reference straight line is obtained, and a difference between the two included angles is a deviation angle of the battery corresponding to the battery compartment 30, that is, an angle that the battery needs to rotate.
Secondly, a preset point and a preset coordinate thereof are selected on the battery, the grabbing component 10 drives the battery to rotate by the deviation angle by taking the round point on the round point calibration plate 20 as a circle center, and a target coordinate generated after the rotation of the preset point can be calculated according to the preset coordinate of the preset point on the battery, the round point coordinate of the round point on the round point calibration plate 20 and the deviation angle. The specific calculation process is as follows:
and when the dot coordinates are the original point, setting the coordinates of the preset point as (Xa, Ya) and the rotation angle as theta, and setting the target coordinates of the rotated background of the preset point as (Xb, Yb). When the rotation angle θ is known, the target coordinates (Xb, Yb) can be calculated according to the following calculation formula:
Xb=Xa*cosθ-Ya*sinθ
Yb=Xa*sinθ+Ya*cosθ
the representation converted into a matrix is:

when the dot coordinates are not the origin, the dot coordinates are (a, b), and the target coordinates are calculated in the following manner:
Xb=(Xa-a)cosθ-(Ya-b)sinθ+a
Yb=(Xa-a)sinθ+(Ya-b)cosθ+b
in Halcon, the above calculation formula can be used for direct calculation, and the following operator can also be used for calculation.
hom_mat2d_identity(HomMat2DIdentity)
hom_mat2d_rotate(HomMat2DIdentity,rad(θ),a,b,HomMat2DRotate)
affine_trans_point_2d(HomMat2DRotate,X1,Y1,X3,Y3)
And finally, calculating to obtain the target coordinates of the battery through the algorithm, and controlling the grabbing assembly 10 to move the preset point on the battery from the target coordinate position to be overlapped with the reference coordinates of the battery bin 30 so as to perform accurate assembly. Therefore, an optimization algorithm is realized, and the calculation precision is improved.
Specifically, the dot calibration plate is made of a film plate through laser printing, so that the precision of the dot calibration plate reaches 0.03mm, and the identification precision is further improved.
Specifically, the image acquisition assembly comprises a positioning camera and a light source, the positioning camera is arranged at the top of the bracket, and the light source is arranged below the positioning camera. The light source is designed to be hollow, so that the light source can provide illumination for the positioning camera and can not block a shooting light path of the positioning camera.
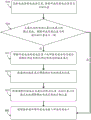
In addition, the present invention further provides a method for identifying and positioning battery displacement, please refer to fig. 1, where fig. 1 is a schematic flow chart of a first embodiment of the method for identifying and positioning battery displacement according to the present invention, and the method for identifying and positioning battery displacement includes the following steps:
step S10: acquiring a battery compartment position of a battery compartment, and setting the battery compartment position as a target position;
through the image acquisition subassembly is right the battery compartment is fixed a position and is taken a picture and obtain the battery compartment 30 position, the image acquisition subassembly can include the setting element, the setting element set up in battery compartment 30 top, it is right to be used for battery compartment 30 location is taken a picture, thereby obtains the battery compartment position of battery compartment 30, with the battery compartment 30 position is regarded as the target position that the battery needs to be adjusted to. For example, a reference point is selected on the battery compartment 30 and the reference coordinates of the reference point are determined. Or before the grasping assembly 10 grasps the battery from the external feeding mechanism, the battery bin 30 is positioned and photographed to obtain the reference coordinate of the reference point, and the reference coordinate of the reference point is used as the target coordinate of the battery;
step S20: collecting the battery position of the battery and the dot coordinates on the dot calibration plate 20, and judging whether the battery position is consistent with the target position;
when the grabbing component 10 grabs the battery and moves to the upper part of the battery bin, the image acquisition component shoots and positions the battery and the dots on the dot calibration plate 20 to acquire the dot coordinates of the dots and the battery position of the battery. For example, the image acquisition assembly takes a picture of the battery at a fixed position, two points are preset on the battery, the two preset points are respectively connected with the circular points on the circular point calibration plate 20, an included angle between the two straight lines is calculated, similarly, two corresponding reference points are selected from the battery bin 30, the included angle between the reference points and the connection line of the circular points is calculated, and when the two included angles are adjusted to be the same, it is determined that the position of the battery corresponds to the position of the battery bin 30. Or, the image acquisition assembly takes a picture of the battery in a positioning manner, selects a preset point on the battery, obtains a preset coordinate of the preset point and an included angle between one edge of the battery and a reference straight line, and similarly, selects a corresponding reference point and reference edge on the battery bin 30, and obtains a reference coordinate of the reference point and an included angle between the reference edge and the reference straight line. When the two included angles are the same, judging that the battery position is consistent with the target position, and adjusting the battery position;
step S30: when the battery position is inconsistent with the target position, adjusting the battery to the target position according to the battery position, the target position and the dot coordinates;
obtaining a variable of the battery moving from the battery position to the target position, for example, adjusting the variable in a rotating manner, and then calculating a new coordinate generated by a preset point on the battery after the battery is adjusted according to a dot coordinate on the dot calibration plate 20, a rotated angle when the battery position is adjusted, and a preset coordinate of the preset point on the battery before the adjustment;
step S40: and controlling a grabbing assembly to place the battery into the battery bin.
The battery may be placed in the battery compartment 30 by adjusting the target coordinates on the battery to overlap the reference coordinates by the grasping assembly 10. According to the technical scheme, when a coordinate system is established, the grabbing component is provided with the base point, the grabbing component directly calculates the position of the battery after adjustment according to the relation between the coordinate of the base point and the position of the battery in the process of adjusting the position of the battery to be corresponding to the position of the battery bin, and then the grabbing component moves the position of the battery after adjustment to be overlapped with the position of the battery bin, so that the displacement of the battery can be identified and positioned only by taking a picture once, the production beat is saved, and the production efficiency is improved.
Further, referring to fig. 2, based on a schematic flow chart of a second embodiment of the first embodiment of the method for identifying and positioning battery displacement of the present invention, the step S30 includes:
step S31: determining a deviation angle between the battery and the battery bin according to the battery position of the battery and the target position of the battery bin;
step S32: adjusting the angle information of the battery according to the deviation angle;
step S33: and adjusting the battery to the target position according to the battery position, the deviation angle and the dot coordinate.
In practice, in order to optimize the algorithm, a deviation angle between the battery and the battery compartment 30 is usually calculated, and the rotated position of the battery is calculated according to the deviation angle.
Firstly, calculating a deviation angle between the battery and the battery bin 30, and acquiring the position of the edge of the battery in a coordinate system and the position of the corresponding edge on the battery bin in the coordinate system through image analysis; acquiring a first included angle between the edge of the battery and the X axis of the coordinate system and a second included angle between the corresponding edge of the battery bin and the X axis of the coordinate system through image analysis; and the difference value of the first included angle and the second included angle is the deviation angle. Or when the battery is photographed and positioned, a reference straight line is selected on the image, a certain edge is selected on the battery, and the included angle between the edge and the reference straight line is obtained through the analysis of the image. For example, the length of the battery is selected, correspondingly, the length of the battery compartment 30 is also selected as a reference edge, an included angle between the reference edge and a reference straight line is obtained, and a difference between the two included angles is a deviation angle of the battery corresponding to the battery compartment 30, that is, an angle that the battery needs to rotate. And calculating the target coordinate generated after the preset point rotates according to the preset coordinate of the preset point on the battery, the dot coordinate of the dot on the dot calibration plate 20 and the deviation angle. In the above process, the connection line between the preset point and the reference point to the dot on the dot calibration board 20 is the projection of the preset point on the horizontal plane. Therefore, the displacement of the battery can be recognized and positioned only by taking a picture once, the production beat is saved, and the production efficiency is improved.
Further, referring to fig. 3, based on a third embodiment of the method for identifying and positioning battery displacement according to the present invention, the step S33 includes:
step S331: calculating the offset of the battery on an X axis and a Y axis in a coordinate system when the battery is adjusted from the battery position to the target position according to the deviation angle and the dot coordinates;
step S333: and the sum of the battery position and the offset of the battery on the X axis and the Y axis in the coordinate system is the target position.
The battery is driven by the grabbing component 10 to rotate by the deviation angle by taking the dot on the dot calibration plate 20 as a circle center, and the target coordinate generated after the rotation of the preset point can be calculated according to the preset coordinate of the preset point on the battery, the dot coordinate of the dot on the dot calibration plate 20 and the deviation angle. The specific calculation process is as follows:
and when the dot coordinates are the original point, setting the coordinates of the preset point as (Xa, Ya) and the rotation angle as theta, and setting the target coordinates of the rotated background of the preset point as (Xb, Yb). When the rotation angle θ is known, the target coordinates (Xb, Yb) can be calculated according to the following calculation formula:
Xb=Xa*cosθ-Ya*sinθ
Yb=Xa*sinθ+Ya*cosθ
the representation converted into a matrix is:

when the dot coordinates are not the origin, the dot coordinates are (a, b), and the target coordinates are calculated in the following manner:
Xb=(Xa-a)cosθ-(Ya-b)sinθ+a
Yb=(Xa-a)sinθ+(Ya-b)cosθ+b
in Halcon, the above calculation formula can be used for direct calculation, and the following operator can also be used for calculation.
hom_mat2d_identity(HomMat2DIdentity)
hom_mat2d_rotate(HomMat2DIdentity,rad(θ),a,b,HomMat2DRotate)
affine_trans_point_2d(HomMat2DRotate,X1,Y1,X3,Y3)
And finally, calculating to obtain the target coordinates of the battery through the algorithm, and controlling the grabbing assembly 10 to move the preset point on the battery from the target coordinate position to be overlapped with the reference coordinates of the battery bin 30 so as to perform accurate assembly. Therefore, an optimization algorithm is realized, and the calculation precision is improved.
The above description is only a preferred embodiment of the present invention, and is not intended to limit the scope of the present invention, and all modifications and equivalents of the present invention, which are made by the contents of the present specification and the accompanying drawings, or directly/indirectly applied to other related technical fields, are included in the scope of the present invention.
Claims (8)
1. A battery displacement identification and positioning device is characterized by comprising: the battery position information and the battery bin position information are acquired by the image acquisition assembly, the battery bin and the grabbing assembly are arranged on the positioning table, the image acquisition assembly is arranged below the grabbing assembly, the dot calibration plate is arranged on the grabbing assembly and is positioned in an acquisition range above the image acquisition assembly, and the grabbing assembly calculates the position of the battery after being adjusted to correspond to the battery bin by taking dots on the dot calibration plate as base points;
the grabbing component drives the battery to rotate by a deviation angle by taking a dot on the dot calibration plate as a circle center, and a target coordinate generated after the rotation of a preset point is obtained according to the preset coordinate of the preset point on the battery, the dot coordinate of the dot on the dot calibration plate and the deviation angle;
the grabbing component moves the battery position to a position corresponding to the battery bin;
the specific calculation process is as follows:
when the dot coordinates are the origin, the preset point coordinates are (Xa, Ya) and the rotation angle is θ, the target coordinates after the preset point is rotated are (Xb, Yb), and when the rotation angle θ is known, the target coordinates (Xb, Yb) can be calculated according to the following calculation formula:
Xb=Xa*cosθ-Ya*sinθ
Yb=Xa*sinθ+Ya*cosθ
when the dot coordinates are not the origin, the dot coordinates are (a, b), and the target coordinates are calculated in the following manner:
Xb=(Xa-a)cosθ-(Ya-b)sinθ+a
Yb=(Xa-a)sinθ+(Ya-b)cosθ+b。
2. the battery displacement identification and positioning device of claim 1, wherein the grasping assembly comprises: the battery clamping device comprises a support and a clamping part used for clamping a battery, wherein the clamping part is arranged at the bottom of the support, a dot calibration plate is arranged above the clamping part, the support is driven to carry out nine-point calibration when moving so as to form a rotating matrix, and the central point of the rotating matrix is the base point.
3. The device for identifying and locating battery displacement according to claim 1, wherein the dot calibration plate is made of a film plate through laser printing.
4. The device for recognizing and positioning battery displacement according to claim 2, wherein the image capturing assembly comprises a positioning camera and a light source, the positioning camera is disposed on the top of the bracket, and the light source is disposed under the positioning camera.
5. A method for identifying and positioning battery displacement is characterized by comprising the following steps:
acquiring a battery compartment position of a battery compartment, and setting the battery compartment position as a target position;
collecting the battery position of a battery and dot coordinates on a dot calibration board, and judging whether the battery position is consistent with the target position;
when the battery position is inconsistent with the target position, adjusting the battery to the target position according to the battery position, the target position and the dot coordinates;
controlling a grabbing assembly to place the battery into the battery bin;
selecting a preset point and a preset coordinate thereof on the battery, driving the battery to rotate by a deviation angle by taking a dot on the dot calibration plate as a circle center by the grabbing assembly, and calculating a target coordinate generated after the preset point rotates according to the preset coordinate of the preset point on the battery, the dot coordinate of the dot on the dot calibration plate and the deviation angle;
the specific calculation process is as follows:
when the dot coordinates are the origin, the preset point coordinates are (Xa, Ya) and the rotation angle is θ, the target coordinates after the preset point is rotated are (Xb, Yb), and when the rotation angle θ is known, the target coordinates (Xb, Yb) can be calculated according to the following calculation formula:
Xb=Xa*cosθ-Ya*sinθ
Yb=Xa*sinθ+Ya*cosθ
when the dot coordinates are not the origin, the dot coordinates are (a, b), and the target coordinates are calculated in the following manner:
Xb=(Xa-a)cosθ-(Ya-b)sinθ+a
Yb=(Xa-a)sinθ+(Ya-b)cosθ+b。
6. the method for identifying and locating battery displacement according to claim 5, wherein the step of adjusting the battery to the target position according to the battery position, the target position and the dot coordinates when the battery position is inconsistent with the target position comprises:
determining a deviation angle between the battery and the battery bin according to the battery position of the battery and the target position of the battery bin;
adjusting the angle information of the battery according to the deviation angle;
and adjusting the battery to the target position according to the battery position, the deviation angle and the dot coordinate.
7. The method for identifying and locating battery displacement according to claim 6, wherein the step of determining the deviation angle between the battery and the battery compartment according to the battery position of the battery and the target position of the battery compartment comprises:
acquiring the position of the edge of the battery in a coordinate system and the position of the corresponding edge on the battery bin in the coordinate system through image analysis;
acquiring a first included angle between the edge of the battery and the X axis of the coordinate system and a second included angle between the corresponding edge of the battery bin and the X axis of the coordinate system through image analysis;
and the difference value of the first included angle and the second included angle is the deviation angle.
8. The method for identifying and positioning battery displacement according to claim 7, wherein the step of adjusting the battery to the target position according to the battery position, the deviation angle and the preset dot coordinate comprises:
calculating the offset of the battery on an X axis and a Y axis in a coordinate system when the battery is adjusted from the battery position to the target position according to the deviation angle and the dot coordinates;
and the sum of the battery position and the offset of the battery on the X axis and the Y axis in the coordinate system is the target position.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811238786.5A CN109297409B (en) | 2018-10-23 | 2018-10-23 | Battery displacement identification and positioning device and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811238786.5A CN109297409B (en) | 2018-10-23 | 2018-10-23 | Battery displacement identification and positioning device and method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109297409A CN109297409A (en) | 2019-02-01 |
| CN109297409B true CN109297409B (en) | 2020-07-21 |
Family
ID=65157673
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811238786.5A Active CN109297409B (en) | 2018-10-23 | 2018-10-23 | Battery displacement identification and positioning device and method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109297409B (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111628040B (en) * | 2019-02-26 | 2022-09-09 | 紫石能源有限公司 | Battery interconnection method and system and solar battery interconnection equipment |
| CN111934023A (en) * | 2020-07-29 | 2020-11-13 | 昆山聚创新能源科技有限公司 | Battery cell stacking device and method |
| CN112916763B (en) * | 2020-12-30 | 2023-04-07 | 安翰科技(武汉)股份有限公司 | Automatic guiding shaping and assembling equipment for element pins |
| CN113207274B (en) * | 2021-04-29 | 2023-01-20 | 歌尔科技有限公司 | Automatic battery mounting equipment and automatic battery mounting method |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102072699A (en) * | 2009-11-03 | 2011-05-25 | 三星Sdi株式会社 | Apparatus detecting position of functional layer on electrode |
| JP2011237210A (en) * | 2010-05-07 | 2011-11-24 | Yokogawa Electric Corp | Position measurement system |
| KR101251229B1 (en) * | 2011-09-07 | 2013-04-08 | 현대하이스코 주식회사 | Apparatus for detecting aligned position of membrane electrode assembly and gas diffusion layer and the method thereof |
| CN103745471A (en) * | 2014-01-09 | 2014-04-23 | 南京信息工程大学 | Visual detection and control method for use in automatic boxing of notebook computer batteries |
| CN105216437A (en) * | 2015-11-05 | 2016-01-06 | 东莞市科隆威自动化设备有限公司 | Alignment light source image deviation adjustment self-calibration method |
| CN106289062A (en) * | 2016-09-30 | 2017-01-04 | 哈尔滨工业大学 | A kind of bearing calibration of benchmark camera side-play amount |
| CN206210935U (en) * | 2016-09-30 | 2017-05-31 | 东莞市前延智能科技有限公司 | CCD positions correcting device |
| CN106885521A (en) * | 2017-03-29 | 2017-06-23 | 科力远混合动力技术有限公司 | A kind of battery bag assembly measurement apparatus |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2431632T3 (en) * | 2005-12-23 | 2013-11-27 | Gcoder Systems Ab | Positioning pattern |
| CN104006748B (en) * | 2014-05-15 | 2017-06-13 | 深圳市巨兆数码有限公司 | Soft-package battery size measuring method and its system |
-
2018
- 2018-10-23 CN CN201811238786.5A patent/CN109297409B/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102072699A (en) * | 2009-11-03 | 2011-05-25 | 三星Sdi株式会社 | Apparatus detecting position of functional layer on electrode |
| JP2011237210A (en) * | 2010-05-07 | 2011-11-24 | Yokogawa Electric Corp | Position measurement system |
| KR101251229B1 (en) * | 2011-09-07 | 2013-04-08 | 현대하이스코 주식회사 | Apparatus for detecting aligned position of membrane electrode assembly and gas diffusion layer and the method thereof |
| CN103745471A (en) * | 2014-01-09 | 2014-04-23 | 南京信息工程大学 | Visual detection and control method for use in automatic boxing of notebook computer batteries |
| CN105216437A (en) * | 2015-11-05 | 2016-01-06 | 东莞市科隆威自动化设备有限公司 | Alignment light source image deviation adjustment self-calibration method |
| CN106289062A (en) * | 2016-09-30 | 2017-01-04 | 哈尔滨工业大学 | A kind of bearing calibration of benchmark camera side-play amount |
| CN206210935U (en) * | 2016-09-30 | 2017-05-31 | 东莞市前延智能科技有限公司 | CCD positions correcting device |
| CN106885521A (en) * | 2017-03-29 | 2017-06-23 | 科力远混合动力技术有限公司 | A kind of battery bag assembly measurement apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109297409A (en) | 2019-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109297409B (en) | Battery displacement identification and positioning device and method | |
| CN110125926B (en) | Automatic workpiece picking and placing method and system | |
| CN111791227B (en) | Robot hand-eye calibration method and device and robot | |
| CN110666798B (en) | Robot vision calibration method based on perspective transformation model | |
| CN111127568B (en) | Camera pose calibration method based on spatial point location information | |
| US9519736B2 (en) | Data generation device for vision sensor and detection simulation system | |
| TWI670153B (en) | Robot and robot system | |
| WO2021208933A1 (en) | Image rectification method and apparatus for camera | |
| CN108827154B (en) | Robot non-teaching grabbing method and device and computer readable storage medium | |
| CN108717715A (en) | A kind of line-structured light vision system automatic calibration method for arc welding robot | |
| CN109029257A (en) | Based on stereoscopic vision and the large-scale workpiece pose measurement system of structure light vision, method | |
| CN105323455B (en) | A kind of location compensation method based on machine vision | |
| CN110815213A (en) | Part identification and assembly method and device based on multi-dimensional feature fusion | |
| WO2021012122A1 (en) | Robot hand-eye calibration method and apparatus, computing device, medium and product | |
| JP2016526673A (en) | System and method for tracking the location of a movable target object | |
| CN111791226B (en) | Method and device for realizing assembly through robot and robot | |
| TW201947078A (en) | Method and System for Automatic Calibration of Needle Position | |
| CN112950724B (en) | Screen printing visual calibration method and device | |
| CN114993266B (en) | Positioning device and positioning system | |
| CN111482964A (en) | Novel robot hand-eye calibration method | |
| CN112330749A (en) | Hand-eye calibration method and hand-eye calibration device for camera mounted on robot arm | |
| CN111445521A (en) | Target workpiece position determining method, device, terminal and readable storage medium | |
| CN114833832A (en) | Robot hand-eye calibration method, device, equipment and readable storage medium | |
| CN215037637U (en) | Camera external parameter calibration device for visual guidance of industrial robot | |
| CN109406525B (en) | Bridge apparent disease detection system and detection method thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |