CN108805825B - 一种重定位图像质量评价方法 - Google Patents
一种重定位图像质量评价方法 Download PDFInfo
- Publication number
- CN108805825B CN108805825B CN201810412492.3A CN201810412492A CN108805825B CN 108805825 B CN108805825 B CN 108805825B CN 201810412492 A CN201810412492 A CN 201810412492A CN 108805825 B CN108805825 B CN 108805825B
- Authority
- CN
- China
- Prior art keywords
- org
- image
- scale
- repositioning
- coordinate position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 73
- 239000013598 vector Substances 0.000 claims abstract description 99
- 238000012360 testing method Methods 0.000 claims abstract description 37
- 238000012549 training Methods 0.000 claims abstract description 33
- 238000013441 quality evaluation Methods 0.000 claims abstract description 28
- 230000009466 transformation Effects 0.000 claims abstract description 18
- 239000011159 matrix material Substances 0.000 claims abstract description 16
- 230000008901 benefit Effects 0.000 claims description 26
- 238000006386 neutralization reaction Methods 0.000 claims description 16
- 238000004364 calculation method Methods 0.000 claims description 13
- 230000008569 process Effects 0.000 claims description 11
- 230000006870 function Effects 0.000 claims description 7
- 230000000007 visual effect Effects 0.000 claims description 7
- 238000012886 linear function Methods 0.000 claims description 6
- 241000287196 Asthenes Species 0.000 claims description 4
- 238000001514 detection method Methods 0.000 claims description 4
- UHDGCWIWMRVCDJ-CCXZUQQUSA-N Cytarabine Chemical compound O=C1N=C(N)C=CN1[C@H]1[C@@H](O)[C@H](O)[C@@H](CO)O1 UHDGCWIWMRVCDJ-CCXZUQQUSA-N 0.000 claims description 3
- 238000010801 machine learning Methods 0.000 claims description 3
- 230000008859 change Effects 0.000 abstract description 3
- 238000011156 evaluation Methods 0.000 description 7
- 230000008447 perception Effects 0.000 description 3
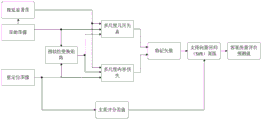
- 238000010586 diagram Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000012854 evaluation process Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000001303 quality assessment method Methods 0.000 description 1
- 239000002904 solvent Substances 0.000 description 1
Images
Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/46—Descriptors for shape, contour or point-related descriptors, e.g. scale invariant feature transform [SIFT] or bags of words [BoW]; Salient regional features
- G06V10/462—Salient features, e.g. scale invariant feature transforms [SIFT]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30168—Image quality inspection
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Data Mining & Analysis (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Evolutionary Biology (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
Abstract
Description











































































































































































































































































| 方法 | PLCC | SROCC | RMSE | OR |
| 本发明方法 | 0.7123 | 0.7056 | 9.2357 | 0.0107 |
Claims (3)




































































































































Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810412492.3A CN108805825B (zh) | 2018-05-03 | 2018-05-03 | 一种重定位图像质量评价方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810412492.3A CN108805825B (zh) | 2018-05-03 | 2018-05-03 | 一种重定位图像质量评价方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108805825A CN108805825A (zh) | 2018-11-13 |
| CN108805825B true CN108805825B (zh) | 2021-04-27 |
Family
ID=64093327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810412492.3A Active CN108805825B (zh) | 2018-05-03 | 2018-05-03 | 一种重定位图像质量评价方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN108805825B (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110223268B (zh) * | 2019-04-24 | 2021-06-11 | 宁波大学 | 一种绘制图像质量评价方法 |
| CN111641822B (zh) * | 2020-05-06 | 2021-08-24 | 宁波大学 | 一种重定位立体图像质量评价方法 |
| CN112419234B (zh) * | 2020-10-21 | 2023-04-25 | 宁波大学 | 一种基于几何特征的重定位立体图像质量评价方法 |
| CN112435231B (zh) * | 2020-11-20 | 2024-07-16 | 深圳市慧鲤科技有限公司 | 图像质量标尺生成方法、评测图像质量的方法及装置 |
| CN112770105B (zh) * | 2020-12-07 | 2022-06-03 | 宁波大学 | 一种基于结构特征的重定位立体图像质量评价方法 |
| CN113192003B (zh) * | 2021-03-26 | 2023-04-28 | 宁波大学 | 一种拼接图像质量评价方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103077514A (zh) * | 2012-12-17 | 2013-05-01 | 西南科技大学 | 一种基于全变分的视觉感知图像质量评价方法 |
| CN105981384A (zh) * | 2013-09-06 | 2016-09-28 | 王舟 | 用于客观感知视频质量评估的方法和系统 |
| CN107105214A (zh) * | 2017-03-16 | 2017-08-29 | 宁波大学 | 一种三维视频图像重定位方法 |
| CN107481250A (zh) * | 2017-08-30 | 2017-12-15 | 吉林大学 | 一种图像分割方法及其评价方法和图像融合方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8230372B2 (en) * | 2009-12-03 | 2012-07-24 | International Business Machines Corporation | Retargeting for electrical yield enhancement |
| US8494302B2 (en) * | 2010-11-11 | 2013-07-23 | Seiko Epson Corporation | Importance filtering for image retargeting |
-
2018
- 2018-05-03 CN CN201810412492.3A patent/CN108805825B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103077514A (zh) * | 2012-12-17 | 2013-05-01 | 西南科技大学 | 一种基于全变分的视觉感知图像质量评价方法 |
| CN105981384A (zh) * | 2013-09-06 | 2016-09-28 | 王舟 | 用于客观感知视频质量评估的方法和系统 |
| CN107105214A (zh) * | 2017-03-16 | 2017-08-29 | 宁波大学 | 一种三维视频图像重定位方法 |
| CN107481250A (zh) * | 2017-08-30 | 2017-12-15 | 吉林大学 | 一种图像分割方法及其评价方法和图像融合方法 |
Non-Patent Citations (4)
| Title |
|---|
| Image Retargeting Quality Assessment: A Study of Subjective Scores and Objective Metrics;Lin Ma et.al;《IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING》;20120807;第6卷(第6期);第626-639页 * |
| Learning Sparse Representation for Objective Image Retargeting Quality Assessment;Qiuping Jiang et.al;《IEEE TRANSACTIONS ON CYBERNETICS》;20180413;第48卷(第4期);第1276-1289页 * |
| 基于内容的图像/视频重定向方法研究;曹连超;《中国优秀硕士学位论文全文数据库信息科技辑(月刊)》;20140315(第03期);第I138-613页 * |
| 结合双向相似性变换的重定向图像质量评价;富振奇;《中国图像图形学报》;20180430;第490-499页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108805825A (zh) | 2018-11-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108805825B (zh) | 一种重定位图像质量评价方法 | |
| CN108428227B (zh) | 基于全卷积神经网络的无参考图像质量评价方法 | |
| CN103996192B (zh) | 基于高质量自然图像统计量模型的无参考图像质量评价方法 | |
| CN112818975B (zh) | 文本检测模型训练方法及装置、文本检测方法及装置 | |
| CN104023230B (zh) | 一种基于梯度关联性的无参考图像质量评价方法 | |
| CN104902267B (zh) | 一种基于梯度信息的无参考图像质量评价方法 | |
| CN106162162B (zh) | 一种基于稀疏表示的重定位图像质量客观评价方法 | |
| CN109978854B (zh) | 一种基于边缘与结构特征的屏幕内容图像质量评估方法 | |
| CN103581661A (zh) | 一种立体图像视觉舒适度评价方法 | |
| CN105357519B (zh) | 基于自相似度特征的无参考立体图像质量客观评价方法 | |
| CN113192003B (zh) | 一种拼接图像质量评价方法 | |
| CN104103064A (zh) | 基于梯度相似度的无参考噪声图像质量评价方法 | |
| CN107945151B (zh) | 一种基于相似性变换的重定位图像质量评价方法 | |
| CN111641822B (zh) | 一种重定位立体图像质量评价方法 | |
| CN106023214B (zh) | 基于中央凹视梯度结构相似性的图像质量评价方法及系统 | |
| CN107018410B (zh) | 一种基于预注意机制和空间依赖性的无参考图像质量评价方法 | |
| CN111179242A (zh) | 图像处理方法及其装置 | |
| CN107292331B (zh) | 基于无监督特征学习的无参考屏幕图像质量评价方法 | |
| CN103996188A (zh) | 一种基于Gabor加权特征的全参考型图像质量评价方法 | |
| CN107274388A (zh) | 一种基于全局信息的无参考屏幕图像质量评价方法 | |
| CN106780452B (zh) | 一种结合小波和角点特征的全参考屏幕图像质量评估方法 | |
| CN107862681B (zh) | 一种自拍图像质量推荐方法 | |
| CN112950479B (zh) | 一种图像灰度区域拉伸算法 | |
| CN116229130A (zh) | 模糊图像的类型识别方法、装置、计算机设备和存储介质 | |
| CN112770105B (zh) | 一种基于结构特征的重定位立体图像质量评价方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20220622 Address after: Room 2202, 22 / F, Wantong building, No. 3002, Sungang East Road, Sungang street, Luohu District, Shenzhen City, Guangdong Province Patentee after: Shenzhen dragon totem technology achievement transformation Co.,Ltd. Address before: 315211, Fenghua Road, Jiangbei District, Zhejiang, Ningbo 818 Patentee before: Ningbo University |
|
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20221208 Address after: B702, Building 2, Dingtai Fenghua, No. 1085, Qianhai Road, Fenghua Community, Nanshan Street, Nanshan District, Shenzhen, Guangdong 518000 Patentee after: Shenzhen Wuxin Tongde Enterprise Management Consulting Partnership (L.P.) Address before: Room 2202, 22 / F, Wantong building, No. 3002, Sungang East Road, Sungang street, Luohu District, Shenzhen City, Guangdong Province Patentee before: Shenzhen dragon totem technology achievement transformation Co.,Ltd. |
|
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20230412 Address after: Building 1003, Building 3, Chongwen Park, Nanshan Zhiyuan, No. 3370 Liuxian Avenue, Fuguang Community, Taoyuan Street, Nanshan District, Shenzhen, Guangdong Province, 518000 Patentee after: Shenzhen Lingkun Information Technology Co.,Ltd. Address before: B702, Building 2, Dingtai Fenghua, No. 1085, Qianhai Road, Fenghua Community, Nanshan Street, Nanshan District, Shenzhen, Guangdong 518000 Patentee before: Shenzhen Wuxin Tongde Enterprise Management Consulting Partnership (L.P.) |