CN108099906B - 安装在汽车上的碰撞预警系统和汽车 - Google Patents
安装在汽车上的碰撞预警系统和汽车 Download PDFInfo
- Publication number
- CN108099906B CN108099906B CN201711400335.2A CN201711400335A CN108099906B CN 108099906 B CN108099906 B CN 108099906B CN 201711400335 A CN201711400335 A CN 201711400335A CN 108099906 B CN108099906 B CN 108099906B
- Authority
- CN
- China
- Prior art keywords
- processor
- collision
- warning system
- obstacle
- alarm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 claims abstract description 17
- 238000000034 method Methods 0.000 claims abstract description 11
- 230000003287 optical effect Effects 0.000 claims description 5
- 238000010586 diagram Methods 0.000 description 5
- 241001465754 Metazoa Species 0.000 description 1
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Traffic Control Systems (AREA)
Abstract
本公开是关于一种安装在汽车上的碰撞预警系统和汽车,属于汽车技术领域。所述碰撞预警系统包括摄像头和处理器,其中:所述处理器与所述摄像头电性连接;所述摄像头,用于采集障碍物图像,并将采集的障碍物图像发送给所述处理器;所述处理器,用于基于多帧的障碍物图像,利用动态图像处理算法,确定碰撞预计时长,如果所述碰撞预计时长小于或者等于预设数值,则向与所述处理器电性连接的报警部件发送报警指令,以使所述报警部件发出报警信号。采用本公开,该碰撞预警系统发出的预警的准确性较好。
Description
技术领域
本公开是关于汽车技术领域,尤其是关于一种安装在汽车上的碰撞预警系统和汽车。
背景技术
随着汽车的使用频率越来越高,人们对汽车的安全性要求也越来越高。越来越多的汽车中安装有碰撞预警系统。
碰撞预警系统也即是,当汽车前方预设范围内有障碍物如行人或汽车时,会发出报警信息的系统,用以提示驾驶员。现有技术中的碰撞预警系统多是基于微波雷达检测汽车前方的障碍物,具体的,碰撞预警系统向汽车前方发射微波,微波遇到障碍物可以反射回来,碰撞预警系统再基于反射回来的微波的回波信号(微波的振幅和相位等),确定是否发出报警信息,例如,回波信号的强度高于预设强度,则发出报警信息。
在实现本公开的过程中,发明人发现至少存在以下问题:
回波信号的强度与障碍物的性质相关,例如,行使的汽车的回波信号较强,行人和地面的回波信号都较弱,且比较接近,这样,如果预设强度较高,则该碰撞预警系统不能对前方是行人发出报警信息,如果预设强度较低,则该碰撞预警系统也会对前方的地面发出报警信息,使该碰撞预警系统经常发出报警信息。可见,上述碰撞预警系统发出预警的准确性较差。
发明内容
为了克服相关技术中存在的问题,本公开提供了一种安装在汽车上的碰撞预警系统和汽车。所述技术方案如下:
根据本公开实施例的第一方面,提供一种安装在汽车上的碰撞预警系统,所述碰撞预警系统包括摄像头和处理器,其中:
所述处理器与所述摄像头电性连接;
所述摄像头,用于采集障碍物图像,并将采集的障碍物图像发送给所述处理器;
所述处理器,用于基于多帧的障碍物图像,利用动态图像处理算法,确定碰撞预计时长,如果所述碰撞预计时长小于或者等于预设数值,则向与所述处理器电性连接的报警部件发送报警指令,以使所述报警部件发出报警信号。
可选的,所述处理器,还用于:
对所述障碍物图像中的障碍物类型进行识别,如果所述障碍物图像中的障碍物类型为预设的目标障碍物类型,且所述碰撞预计时长小于或者等于预设数值,则向所述报警部件发送报警指令。
可选的,所述处理器,还用于:
获取本车的当前车速,如果当前车速大于第一预设速度,则基于多帧的障碍物图像,利用图像处理算法确定碰撞预计时长。
可选的,所述处理器用于基于多帧的障碍物图像,利用光流法确定碰撞预计时长,如果所述碰撞预计时长小于或者等于预设数值,则向所述报警部件发送报警指令。
根据本公开实施例,提供一种汽车,所述汽车包括上述所述的碰撞预警系统,其中:
所述碰撞预警系统安装在所述汽车的内后视镜底座上,所述碰撞预警系统的摄像头朝向所述汽车的前方;
所述碰撞预警系统与所述汽车的点火控制器电性连接;
所述点火控制器,用于启动所述碰撞预警系统。
可选的,所述碰撞预警系统的处理器与所述汽车的整车控制器电性连接;
所述整车控制器,用于向所述处理发送当前车速;
所述处理器,用于如果当前车速大于第一预设速度,则基于多帧的障碍物图像,利用动态图像处理算法确定碰撞预计时长。
可选的,所述报警部件为所述汽车的车内扬声器;
所述处理器与所述车内扬声器电性连接;
所述处理器,用于当所述碰撞预计时长小于或者等于预设数值时,向所述车内扬声器发送第一报警指令;
所述车内扬声器,用于基于所述第一报警指令发出第一报警信号。
可选的,所述处理器与所述汽车的仪表盘电性连接;
所述处理器,用于当所述碰撞预计时长小于或者等于预设数值时,向所述仪表盘发送第二报警指令;
所述仪表盘,用于基于所述第二报警指令显示第二报警信号。
可选的,所述处理器与所述汽车的方向盘电性连接;
所述处理器,用于当所述碰撞预计时长小于或者等于预设数值,则向所述方向盘发送振动指令;
所述方向盘,用于基于所述振动指令产生振动。
本公开的实施例提供的技术方案可以包括以下有益效果:
在本公开实施例中,上述碰撞预警系统包括摄像头和处理器,其中:处理器与摄像头电性连接;摄像头用于采集障碍物图像,并将采集的障碍物图像发送给处理器;处理器用于基于多帧的障碍物图像,确定碰撞预计时长,如果碰撞预计时长小于或者等于预设数值,则向与处理器电性连接的报警部件发送报警指令,以使报警部件发出报警信号。这种基于摄像头的碰撞预警系统可以准确的采集本车前方的障碍物,使该碰撞预警系统发出的预警的准确性较好。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。在附图中:
图1是根据实施例示出的一种碰撞预警系统的结构示意图;
图2是根据实施例示出的一种碰撞预警系统的结构示意图;
图3是根据实施例示出的一种碰撞预警系统的结构示意图;
图4是根据实施例示出的一种碰撞预警系统的结构示意图;
图5是根据实施例示出的一种报警信号的结构示意图;
图6是根据实施例示出的一种碰撞预警系统的应用流程图。
图例说明
1、摄像头 2、处理器
3、报警部件 4、整车控制器
5、点火控制器
通过上述附图,已示出本公开明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本公开构思的范围,而是通过参考特定实施例为本领域技术人员说明本公开的概念。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置和方法的例子。
本公开实施例提供了一种安装在汽车上的碰撞预警系统,其中,碰撞预警系统也称为前方碰撞预警系统,是一种检测到本车与前车由潜在碰撞危险时,进行提醒,以防止或减少交通事故的报警系统。
如图1所示,碰撞预警系统包括摄像头1和处理器2,其中:处理器2与摄像头1电性连接;摄像头1用于采集障碍物图像,并将采集的障碍物图像发送给处理器2;处理器2用于基于多帧的障碍物图像,确定碰撞预计时长,如果碰撞预计时长小于或者等于预设数值,则向与处理器2电性连接的报警部件3发送报警指令,以使报警部件3发出报警信号。
其中,报警部件3可以属于碰撞预警系统,例如可以在碰撞预警系统中设置一扬声器等,报警部件3还可以是汽车本身的部件,例如可以是车内扬声器,还可以是汽车的仪表盘等。
在实施中,该碰撞预警系统通常安装在汽车的车内后视镜底座上,其中摄像头1朝向汽车前进的方向。如图2所示,处理器2还与报警部件3电性连接,报警部件3用于发出报警信号以提醒驾驶员。摄像头1可以采集汽车前方的障碍物图像,并将采集的障碍物图像发送给处理器2,处理器2基于连续多帧的障碍物图像,利用图像处理算法,如光流法,确定碰撞预计时长。其中碰撞预计时长也即是,未来时长内本车与障碍物发生碰撞的时长。如果该碰撞预计时长小于预设数值,则处理器2可以向报警部件3发送报警指令,报警部件3基于报警指令发出报警信号。其中,上述报警信号可以以声音的方式,也可以以视觉的方式,也可以以触觉的方式等,以引起驾驶员的注意。这种基于摄像头的碰撞预警系统可以准确的采集本车前方的场景,使该碰撞预警系统发出预警的准确性较好。
另外,这种基于摄像头的碰撞预警系统可以做到全天候监测汽车前方的障碍物,与基于微波雷达的碰撞预警系统相比,受天气影响较小,例如在雨雪天气这种基于摄像头的碰撞预警系统仍然可以准确的发出报警信号。
基于摄像头的特点以及多次试验结果可知,该碰撞预警系统可以有效探的距离为150米,有效的报警距离可以达到100以上,这种基于摄像头的碰撞预警系统发出报警信号的延时小,实用性较好,可以满足全天候监测。
可选的,该碰撞预警系统还可以识别障碍物的种类,具体的,处理器2中储存有大量的障碍物类型,如汽车、行人、动物、山地等。处理器2在计算本车与障碍物的碰撞预计时长的同时,会对该障碍物进行识别,如果障碍物图像中的障碍物类型为预设的目标障碍物类型,且计算出的碰撞预计时长小于或者等于预设数值,则处理器2向报警部件3发出报警指令。
这样,该碰撞预警系统可以基于连续多帧的障碍物图像,不仅可以确定本车与障碍物之间的碰撞预计时长,还可以识别出障碍物的类型,基于碰撞预计时长和障碍物类型发出报警信号,进而可以提高该碰撞预警系统发出报警信号的准确率。
可选的,当汽车的车速比较低的时候,当前方有障碍物的时候,驾驶员可以很快进行刹车,所以在车速比较低的时候,该碰撞预警系统可以不发出报警信号,相应的处理可以是,如图3所示,处理器2还与汽车的整车控制器4电性连接,这样,汽车的整车控制器4可以向处理器2发送车速,当处理器2检测到当前车速大于第一预设速度时,处理器2可以基于连续多帧的障碍物图像,利用图像处理算法,如光流法计算碰撞预计时长。然后处理器2再基于计算出的碰撞预计时长与预设数值的关系,确定是否发出报警信息。这样,该碰撞预警系统还基于汽车的当前车度来发出报警信号,使得该碰撞预警系统的实用性较好。
基于上述所述,当处理器2检测到当前车速大于第一预设速度时,对接收到的障碍物图像利用动态图像处理算法,计算本车与障碍物之间的碰撞预计时长。而当处理器2检测到当前车速由大于第一预设速度降低到第二预设速度时,对接收到的障碍物图像不做处理。其中,第二预设速度和第一预设速度之间的速度区间为缓冲区间,以防止车速在第一预设速度上下范围进行波动时,处理器2对障碍物图像的处理也出现处理与停止处理的波动。
可选的,上述碰撞预警系统还包括电源键,该电源键可以设置在汽车的电池与碰撞预警系统的主干电路上,当电源键处于开启状态时,电池向碰撞预警系统供电,以启动该碰撞预警系统。其中,在默认情况下,该电源键处于开启状态,也即是,每当汽车上电之后,该碰撞预警系统便会自动启动。当然用户还可以通过上述电源键手动关闭该碰撞预警系统。
在本公开实施例中,上述碰撞预警系统包括摄像头和处理器,其中:处理器与摄像头电性连接;摄像头用于采集障碍物图像,并将采集的障碍物图像发送给处理器;处理器用于基于多帧的障碍物图像,确定碰撞预计时长,如果碰撞预计时长小于或者等于预设数值,则向与处理器电性连接的报警部件发送报警指令,以使报警部件发出报警信号。这种基于摄像头的碰撞预警系统可以准确的采集本车前方的场景,使该碰撞预警系统发出预警的准确性较好。
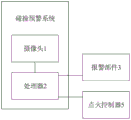
本公开还提供一种汽车,该汽车包括上述所述的碰撞预警系统,其中:碰撞预警系统安装在汽车的内后视镜底座上,碰撞预警系统的摄像头1朝向汽车的前方;碰撞预警系统与汽车的点火控制器5电性连接;点火控制器5,用于启动碰撞预警系统。
在实施中,如图4所示,碰撞预警系统中的处理器2还与汽车的点火控制器5电性连接,当驾驶员开启点火控制器之后,整车进行上电,上述碰撞预警系统启动,点火控制器5,用于启动碰撞预警系统。这样,当驾驶员启动点火控制器5之后,碰撞预警系统自动启动,摄像头1可以采集汽车前方的障碍物图像,并将障碍物图像发送给处理器2,处理器2基于连续多帧的障碍物图像,利用动态图像处理算法确定障碍物与本车之间的碰撞预计时长。如果碰撞预计时长小于或者等于预设数值,则处理器2向与其电性连接的报警部件3发出报警指令,报警部件3接收到报警指令之后,发出报警信号,以提醒驾驶员。
这种基于摄像头的碰撞预警系统可以提高碰撞预警的准确性。
可选的,该碰撞预警系统可以基于当前车速发出碰撞预警,相应的可以是,碰撞预警系统的处理器2与汽车的整车控制器4电性连接;整车控制器,用于向处理器2发送当前车速;处理器2,用于如果当前车速大于第一预设速度,则基于多帧的障碍物图像,利用动态图像处理算法确定碰撞预计时长。
可选的,报警部件3发出的报警信号可以是预设频率的声音,相应的,报警部件为汽车的车内扬声器;处理器2与车内扬声器电性连接;处理器2用于向车内扬声器发出第一报警指令;车内扬声器用于基于上述第一报警指令发出第一报警信号。其中,第一报警信号可以是预设频率的声音。这样,当处理器2确定出本车与本车前方的障碍物之间的碰撞预计时长小于或者等于预设数值之后,向车内扬声器发送第一报警指令。车内扬声器接收到上述第一报警指令之后,发出第一报警信号。
可选的,报警部件3发出的报警信号可以是预设的图像信息,相应的,处理器与汽车的仪表盘电性连接;处理器,用于当碰撞预计时长小于或者等于预设数值,则向仪表盘发送第二报警指令;仪表盘,用于基于第二报警指令显示第二报警信号。
其中,第二报警信号可以是如图5所示的预设图片信息。
在实施中,当处理器确定出本车与本车前方的障碍物之间的碰撞预计时长小于或者等于预设数值之后,向本车的仪表盘发送第二报警指令,仪表盘接收到第二报警指令之后,可以基于第二报警指令在仪表盘上,显示如图5所示的预设图片信息。
可选的,报警部件3发出的报警信号可以以触觉的方式发出,相应的,处理器2与汽车的方向盘电性连接;处理器2,用于当碰撞预计时长小于或者等于预设数值,则向方向盘发送振动指令;方向盘,用于基于振动指令产生振动。
在实施中,方向盘中通常设置有振动器,处理器2可以与方向盘中的振动器电性连接。当处理器2确定出本车与本车前方的障碍物之间的碰撞预计时长小于或者等于预设数值之后,向振动器发送振动指令,振动器接收到该振动指令之后,产生振动信号,以提醒驾驶员。
基于上述所述,在实际应用中,上述碰撞预警系统的应用场景可以按照如图6所示的流程进行:
驾驶员启动汽车的点火控制器之后,该碰撞预警系统自动启动,进入步骤1自检,例如,处理器2对摄像头1进行检测,主要检测摄像头1是否存在故障,如果摄像头1存在故障,则进入步骤2故障报警,处理器2向仪表盘发出故障指令,仪表盘接收到该故障指令之后,可以在仪表盘上显示摄像头1的故障信息,例如,仪表盘上显示黄色的摄像头图标。如果摄像头不存在故障,则进入步骤3待机状态,该碰撞预警系统处于待机状态,这种状态下,摄像头1还可以继续采集障碍物图像,但是处理器2不对接收到的障碍物图像进行处理,也即是,处理器不计算碰撞预计时长。此时,驾驶员也可以手动关闭该碰撞预警系统。
驾驶员启动发动机之后,汽车的整车控制器4周期性向处理器2发送车速,当处理器2检测到当前车速大于第一预设速度时,则进入步骤4,处理器2对接收到的障碍物图像进行分析,此时,该碰撞预警系统处于激活状态,这个状态下,如果处理器2检测到该碰撞预警系统中某一部件出现故障,则也会进入步骤2故障报警。当处理器2接收到摄像头1发送的障碍物图像时,利用光流法计算本车与该障碍物的碰撞预计时长,如果碰撞预计时长小于预设数值,则进入步骤5,处理器2可以向车内扬声器发送代表预设频率声音的第一报警指令,车内扬声器接收到处理器2发送的第一报警指令之后,发出预设频率的声音。另外,处理器2向车内扬声器发送第一报警指令的同时,还可以向仪表盘发送第二报警指令,仪表盘接收到第二报警指令之后,可以在仪表盘上显示如图3所示的图标,以提示驾驶员。进一步,处理器2还可以向方向盘中的振动器发出振动指令,振动器接收到该振动指令之后,进行振动,以提醒驾驶员。
当驾驶员对汽车进行降速时,处理器2检测到汽车的车速由第一预设速度降为第二预设速度时,则进入步骤3,处理器2可以不对接收到的障碍物图像进行处理,也即是不计算碰撞预计时长。此时,该碰撞预警系统处于待机状态。
在本公开实施例中,上述碰撞预警系统包括摄像头和处理器,其中:处理器与摄像头电性连接;摄像头用于采集障碍物图像,并将采集的障碍物图像发送给处理器;处理器用于基于多帧的障碍物图像,确定碰撞预计时长,如果碰撞预计时长小于或者等于预设数值,则向与处理器电性连接的报警部件发送报警指令,以使报警部件发出报警信号。这种基于摄像头的碰撞预警系统可以准确的采集本车前方的场景,使该碰撞预警系统发出预警的准确性较好。
本领域技术人员在考虑说明书及实践这里公开的公开后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由上面的权利要求指出。
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
Claims (8)
1.一种安装在汽车上的碰撞预警系统,其特征在于,所述碰撞预警系统包括摄像头和处理器,其中:
所述处理器与所述摄像头电性连接;
所述摄像头,用于采集障碍物图像,并将采集的障碍物图像发送给所述处理器;
所述处理器,用于基于多帧的障碍物图像,利用动态图像处理算法,确定碰撞预计时长,如果所述碰撞预计时长小于或者等于预设数值,则向与所述处理器电性连接的报警部件发送报警指令,以使所述报警部件发出报警信号;
所述处理器,还用于获取本车的当前车速,如果当前车速大于第一预设速度,则基于多帧的障碍物图像,利用图像处理算法确定碰撞预计时长;如果所述当前车速小于所述第一预设速度时,对接收到的所述基于多帧的障碍物图像不做处理,其中如果当前车速由大于所述第一预设速度降低到第二预设速度时,对接收到的所述基于多帧的障碍物图像不做处理,而在当前车速由大于所述第一预设速度降低到所述第二预设速度期间时,对接收到的所述基于多帧的障碍物图像进行处理。
2.根据权利要求1所述的方法,其特征在于,所述处理器,还用于:
对所述障碍物图像中的障碍物类型进行识别,如果所述障碍物图像中的障碍物类型为预设的目标障碍物类型,且所述碰撞预计时长小于或者等于预设数值,则向所述报警部件发送报警指令。
3.根据权利要求1或2任一项所述的方法,其特征在于,所述处理器用于基于多帧的障碍物图像,利用光流法确定碰撞预计时长,如果所述碰撞预计时长小于或者等于预设数值,则向所述报警部件发送报警指令。
4.一种汽车,其特征在于,所述汽车包括权利要求1-3任一项所述的碰撞预警系统,其中:
所述碰撞预警系统安装在所述汽车的内后视镜底座上,所述碰撞预警系统的摄像头朝向所述汽车的前方;
所述碰撞预警系统与所述汽车的点火控制器电性连接;
所述点火控制器,用于启动所述碰撞预警系统。
5.根据权利要求4所述的汽车,其特征在于,所述碰撞预警系统的处理器与所述汽车的整车控制器电性连接;
所述整车控制器,用于向所述处理发送当前车速;
所述处理器,用于如果当前车速大于第一预设速度,则基于多帧的障碍物图像,利用动态图像处理算法确定碰撞预计时长。
6.根据权利要求4所述的汽车,其特征在于,所述报警部件为所述汽车的车内扬声器;
所述处理器与所述车内扬声器电性连接;
所述处理器,用于当所述碰撞预计时长小于或者等于预设数值时,向所述车内扬声器发送第一报警指令;
所述车内扬声器,用于基于所述第一报警指令发出第一报警信号。
7.根据权利要求4所述的汽车,其特征在于,所述处理器与所述汽车的仪表盘电性连接;
所述处理器,用于当所述碰撞预计时长小于或者等于预设数值时,向所述仪表盘发送第二报警指令;
所述仪表盘,用于基于所述第二报警指令显示第二报警信号。
8.根据权利要求4所述的汽车,其特征在于,所述处理器与所述汽车的方向盘电性连接;
所述处理器,用于当所述碰撞预计时长小于或者等于预设数值,则向所述方向盘发送振动指令;
所述方向盘,用于基于所述振动指令产生振动。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201711400335.2A CN108099906B (zh) | 2017-12-21 | 2017-12-21 | 安装在汽车上的碰撞预警系统和汽车 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201711400335.2A CN108099906B (zh) | 2017-12-21 | 2017-12-21 | 安装在汽车上的碰撞预警系统和汽车 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108099906A CN108099906A (zh) | 2018-06-01 |
| CN108099906B true CN108099906B (zh) | 2020-01-10 |
Family
ID=62211689
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201711400335.2A Active CN108099906B (zh) | 2017-12-21 | 2017-12-21 | 安装在汽车上的碰撞预警系统和汽车 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN108099906B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109835251B (zh) * | 2019-03-13 | 2022-09-13 | 重庆睿驰智能科技有限公司 | 车辆前向碰撞预警系统 |
| CN110276988A (zh) * | 2019-06-26 | 2019-09-24 | 重庆邮电大学 | 一种基于碰撞预警算法的辅助驾驶系统 |
| KR102408746B1 (ko) * | 2020-07-31 | 2022-06-15 | 주식회사 에이치엘클레무브 | 충돌 위험 저감 장치 및 방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103903479A (zh) * | 2014-04-23 | 2014-07-02 | 奇瑞汽车股份有限公司 | 车辆安全行驶预警方法、系统及车辆终端设备 |
| CN105574552A (zh) * | 2014-10-09 | 2016-05-11 | 东北大学 | 一种基于单目视觉的车辆测距与碰撞预警方法 |
| CN105679096A (zh) * | 2016-03-23 | 2016-06-15 | 深圳祖师汇科技股份有限公司 | 一种前车碰撞预警判定方法及装置 |
| FR3039124A1 (fr) * | 2015-07-23 | 2017-01-27 | Peugeot Citroen Automobiles Sa | Procede et dispositif d’aide a la conduite d’un vehicule precede par un obstacle, par affichage d’un message d’alerte en fonction d’un seuil adaptatif |
| DE102016117700A1 (de) * | 2015-09-30 | 2017-03-30 | Gm Global Technology Operations, Llc | Externes Fahrzeugwarnsystem und Verfahren |
| CN106961583A (zh) * | 2017-03-28 | 2017-07-18 | 深圳市车车安信息技术有限公司 | 双摄像头实景智能行车方法及系统 |
-
2017
- 2017-12-21 CN CN201711400335.2A patent/CN108099906B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103903479A (zh) * | 2014-04-23 | 2014-07-02 | 奇瑞汽车股份有限公司 | 车辆安全行驶预警方法、系统及车辆终端设备 |
| CN105574552A (zh) * | 2014-10-09 | 2016-05-11 | 东北大学 | 一种基于单目视觉的车辆测距与碰撞预警方法 |
| FR3039124A1 (fr) * | 2015-07-23 | 2017-01-27 | Peugeot Citroen Automobiles Sa | Procede et dispositif d’aide a la conduite d’un vehicule precede par un obstacle, par affichage d’un message d’alerte en fonction d’un seuil adaptatif |
| DE102016117700A1 (de) * | 2015-09-30 | 2017-03-30 | Gm Global Technology Operations, Llc | Externes Fahrzeugwarnsystem und Verfahren |
| CN105679096A (zh) * | 2016-03-23 | 2016-06-15 | 深圳祖师汇科技股份有限公司 | 一种前车碰撞预警判定方法及装置 |
| CN106961583A (zh) * | 2017-03-28 | 2017-07-18 | 深圳市车车安信息技术有限公司 | 双摄像头实景智能行车方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108099906A (zh) | 2018-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107458306B (zh) | 车辆安全预警方法及装置 | |
| JP6084598B2 (ja) | 標識情報表示システム及び標識情報表示方法 | |
| EP2523173B1 (en) | Driver assisting system and method for a motor vehicle | |
| CN105608926B (zh) | 告警提示方法、告警提示系统和终端 | |
| CN111369828B (zh) | 一种车辆转弯盲区的安全预警系统及方法 | |
| US20120166042A1 (en) | Sound output device for electric vehicle | |
| CN108528333A (zh) | 一种变道辅助报警系统 | |
| JP2011238161A (ja) | 警報装置 | |
| CN204855800U (zh) | 车载雷达系统 | |
| JPH11258343A (ja) | 自動車の障害物検出装置 | |
| CN210199309U (zh) | 一种车辆雷达预警装置和车辆 | |
| CN103303194A (zh) | 用于警告物体与静止汽车的车门可能碰撞的方法和系统 | |
| CN108099906B (zh) | 安装在汽车上的碰撞预警系统和汽车 | |
| CN110901536A (zh) | 一种盲区检测报警系统及其工作方法 | |
| US9139132B2 (en) | Vehicle approach information device with indicator to the driver | |
| JP4873255B2 (ja) | 車両用報知システム | |
| JP2012201316A (ja) | 車両接近警告装置 | |
| JP2021174436A (ja) | 制御装置 | |
| US20090115593A1 (en) | Vehicular warning system and method | |
| WO2019131121A1 (ja) | 信号処理装置および方法、並びにプログラム | |
| CN115593308A (zh) | 一种车辆提示音控制方法,系统及存储介质 | |
| CN111845347B (zh) | 车辆行车安全的提示方法、车辆和存储介质 | |
| JP2019028482A (ja) | 車載器および運転支援装置 | |
| CN113525401A (zh) | 辅助汽车驾驶的预警方法及毫米波雷达系统 | |
| CN114228705A (zh) | 一种电动车预警系统及方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |