CN101057160B - 用于地震数据采集的方法和设备 - Google Patents
用于地震数据采集的方法和设备 Download PDFInfo
- Publication number
- CN101057160B CN101057160B CN2004800443930A CN200480044393A CN101057160B CN 101057160 B CN101057160 B CN 101057160B CN 2004800443930 A CN2004800443930 A CN 2004800443930A CN 200480044393 A CN200480044393 A CN 200480044393A CN 101057160 B CN101057160 B CN 101057160B
- Authority
- CN
- China
- Prior art keywords
- cable
- casing
- unit
- container
- clock
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title abstract description 51
- 230000008878 coupling Effects 0.000 claims abstract description 22
- 238000010168 coupling process Methods 0.000 claims abstract description 22
- 238000005859 coupling reaction Methods 0.000 claims abstract description 22
- 229910052701 rubidium Inorganic materials 0.000 claims abstract description 8
- IGLNJRXAVVLDKE-UHFFFAOYSA-N rubidium atom Chemical compound [Rb] IGLNJRXAVVLDKE-UHFFFAOYSA-N 0.000 claims abstract description 8
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 80
- 230000006870 function Effects 0.000 claims description 21
- 230000007246 mechanism Effects 0.000 claims description 20
- 239000013078 crystal Substances 0.000 claims description 18
- 230000000903 blocking effect Effects 0.000 claims description 7
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 claims description 5
- 229910001416 lithium ion Inorganic materials 0.000 claims description 5
- ZZUFCTLCJUWOSV-UHFFFAOYSA-N furosemide Chemical compound C1=C(Cl)C(S(=O)(=O)N)=CC(C(O)=O)=C1NCC1=CC=CO1 ZZUFCTLCJUWOSV-UHFFFAOYSA-N 0.000 claims description 4
- 238000003860 storage Methods 0.000 abstract description 35
- 238000012360 testing method Methods 0.000 abstract description 2
- 238000013075 data extraction Methods 0.000 abstract 1
- 230000033001 locomotion Effects 0.000 description 24
- 230000005540 biological transmission Effects 0.000 description 14
- 230000000694 effects Effects 0.000 description 12
- 238000003908 quality control method Methods 0.000 description 11
- 230000006378 damage Effects 0.000 description 10
- 238000007667 floating Methods 0.000 description 10
- 239000011521 glass Substances 0.000 description 10
- 239000011324 bead Substances 0.000 description 9
- 238000012937 correction Methods 0.000 description 9
- 230000008569 process Effects 0.000 description 9
- 238000004891 communication Methods 0.000 description 8
- 238000013461 design Methods 0.000 description 8
- 238000005516 engineering process Methods 0.000 description 8
- 101000746134 Homo sapiens DNA endonuclease RBBP8 Proteins 0.000 description 7
- 101000969031 Homo sapiens Nuclear protein 1 Proteins 0.000 description 7
- 102100021133 Nuclear protein 1 Human genes 0.000 description 7
- 230000002776 aggregation Effects 0.000 description 7
- 238000004220 aggregation Methods 0.000 description 7
- 230000005284 excitation Effects 0.000 description 7
- 238000009434 installation Methods 0.000 description 7
- 239000000463 material Substances 0.000 description 7
- 230000001360 synchronised effect Effects 0.000 description 7
- 230000007797 corrosion Effects 0.000 description 6
- 238000005260 corrosion Methods 0.000 description 6
- 230000005484 gravity Effects 0.000 description 6
- 238000010008 shearing Methods 0.000 description 6
- 208000027418 Wounds and injury Diseases 0.000 description 5
- 238000000151 deposition Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 239000000284 extract Substances 0.000 description 5
- 238000003825 pressing Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000009897 systematic effect Effects 0.000 description 4
- 239000002131 composite material Substances 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 239000006260 foam Substances 0.000 description 3
- 239000012634 fragment Substances 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 230000001965 increasing effect Effects 0.000 description 3
- 208000014674 injury Diseases 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 229920000728 polyester Polymers 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 239000002253 acid Substances 0.000 description 2
- 230000001154 acute effect Effects 0.000 description 2
- 238000005538 encapsulation Methods 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000005304 joining Methods 0.000 description 2
- 239000007937 lozenge Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229920002635 polyurethane Polymers 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 239000013049 sediment Substances 0.000 description 2
- 230000011218 segmentation Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 241000238557 Decapoda Species 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 239000006096 absorbing agent Substances 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 239000003513 alkali Substances 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 238000009954 braiding Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000002344 fibroplastic effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000003475 lamination Methods 0.000 description 1
- 238000012067 mathematical method Methods 0.000 description 1
- 238000013017 mechanical damping Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 229920001200 poly(ethylene-vinyl acetate) Polymers 0.000 description 1
- 230000001915 proofreading effect Effects 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 239000000700 radioactive tracer Substances 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 239000012266 salt solution Substances 0.000 description 1
- 239000013535 sea water Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000035882 stress Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000003245 working effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/16—Receiving elements for seismic signals; Arrangements or adaptations of receiving elements
- G01V1/18—Receiving elements, e.g. seismometer, geophone or torque detectors, for localised single point measurements
- G01V1/181—Geophones
- G01V1/184—Multi-component geophones
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/38—Seismology; Seismic or acoustic prospecting or detecting specially adapted for water-covered areas
- G01V1/3808—Seismic data acquisition, e.g. survey design
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/38—Seismology; Seismic or acoustic prospecting or detecting specially adapted for water-covered areas
- G01V1/3843—Deployment of seismic devices, e.g. of streamers
- G01V1/3852—Deployment of seismic devices, e.g. of streamers to the seabed
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V2210/00—Details of seismic processing or analysis
- G01V2210/10—Aspects of acoustic signal generation or detection
- G01V2210/14—Signal detection
- G01V2210/142—Receiver location
- G01V2210/1427—Sea bed
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Acoustics & Sound (AREA)
- Environmental & Geological Engineering (AREA)
- Geology (AREA)
- General Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Geophysics (AREA)
- Oceanography (AREA)
- Geophysics And Detection Of Objects (AREA)
Abstract
一种海洋地震探查方法和系统,包括:连续记录的独立海底容器,其特征是它有浅断面箱体。外部缓冲垫用于促进海底耦合并防止鱼网缠绕。各个容器是利用柔软的,非刚性,非导电缆线拴系在一起以控制容器的部署。从船只的甲板上部署和取回容器,该甲板配置成有存放系统和处理系统,可以在运行时使容器固定到缆线上。存放系统是有槽沟的自动电唱机式配置,其中各个容器被随机地存放在槽沟中,在不打开容器的条件下可以进行提取数据,充电,测试和同步的操作。容器可以包含惯性导航系统以确定海底位置和定时的铷钟。该系统包含数学常平架。缆线可以包含剪切耦合,它设计成在缆线张力达到某个水平时自动地切断。
Description
技术领域
本发明涉及地震探查领域。具体地说,本发明涉及地震探查的方法和设备,更具体地说,本发明涉及利用海底测震仪系统的海洋地震探查。
背景技术
地震探查一般利用地震能源以产生一个声音信号,该信号传播进入土壤并被地表下的地震反射器(即,地表下岩性层或流体层之间的界面,其特征是有不同的弹性)部分地反射。位于地球表面或附近的地震接收器检测和记录被反射的信号(称之为“地震反射”),从而产生地表下的地震探查。然后,可以处理被记录的信号或地震能量数据,可以产生有关岩性地表形成物的信息,从而识别这些特征,例如,岩性地表形成物的边界。
典型的是,地震接收器被铺设成一个阵列,其中地震接收器阵列是由沿一行分布的单串接收器构成,为的是记录该行接收器以下的地震剖面。对于在大面积上的数据和形成物的三维表示,必须并排地设置多串接收器,因此,形成一个接收器网格。通常,在阵列内的接收器是互相远离的。例如,在陆地地震探查中,可以按照不同空间的方式部署几百至几千个称之为地震检波器的接收器,例如,典型的网格配置,其中每串接收器延伸1600米,每隔50米有一个检测器,相继各串之间的间隔为500米。在海洋探查中,有接收器的拖曳式浮筒,它们称之为水听器,连接在拖曳船之后可以长达12000米。
一般地说,几个接收器连接成并行-串行组合,在单个双扭线上形成单个接收器组或管道。在数据收集过程中,来自每个管道的输出被数字化和记录,用于随后的分析。这些接收器组通常连接到电缆,用于与接收器的通信并传输被收集的数据到处在中心位置的记录仪。更具体地说,在陆地上进行这种探查时,数据传输的电缆遥测技术用于通过电缆互连的检测器单元。其他的系统利用数据传输的无线方法,因此,各个检测器单元不是互相连接的。在数据被提取之前,其他的一些系统暂时存储这些数据。
虽然检测和记录地震反射的基本过程在陆地与在海洋环境下是相同的,但海洋环境有一些独特的问题,这是因为覆盖在地球表面上有大量的水,最显著的是,高压深水活动和盐水活动的腐蚀环境。此外,即使简单的部署和取回也是复杂的,因为各种操作必须在地震探查船舶的甲板下进行,其中诸如波浪,天气和有限空间等的外来因素可以大大影响这种操作。
在一个普通的海洋地震探查方法中,地震操作是在水体的表面上进行的。海洋船舶拖曳浮筒中埋入用于检测通过水柱的反射能量的水听器。浮筒通常是由水听器串,其他的导电体以及用于提供近似中间浮力的材料构成。制成的浮筒漂浮在水面上。相同或其他类似的海洋船舶拖曳声能源,例如,空气枪,发射能量脉冲,向下传输进入到水下的地表岩性形成物。
放置在海底上的系统也被使用多年。这种装置通常称之为“OBC”(海底电缆)或“OBS”(海底地震计)系统。现有技术使用三组主要类型的海底设备以测量海底上的地震信号。第一种类型设备是OBC系统,类似于拖曳式浮筒,它是由包含地震检波器和/或水听器的电缆构成,并铺设在海底上,其中检测器单元是与电缆遥测互连。通常,地震船舶部署电缆离开船头或船尾,并取回船舶相反端的电缆。这种OBC系统可以有电缆实际配置产生的缺点。例如,在部署三维地震检波器时,因为电缆和地震检波器与海底上沉淀物的耦合不是坚固的,沉淀物之外的水平运动,例如,海底流动,可以造成错误的信号。在这相同的情况下,由于它的伸长型结构,在试图记录剪切波数据时,OBC系统仅在沿电缆的主轴上有满意的耦合。此外,需要使用三个船只进行这种操作,除了地震能源船舶以外,还有用于电缆部署所需的特殊装备船舶,和用于记录所需的单独船舶。记录船舶通常是稳定地固定到电缆,而部署船舶通常是与接收器线部署和取回电缆作恒定的运动。因为记录船舶与电缆有恒定的实际接触,需要努力保持船舶的位置,波动作和海流的力量可以在电缆内产生很大的张力,从而增加断裂电缆或设备失效,以及引入干扰信号到电缆的可能性。最后,这种电缆系统有很高的资本投资和昂贵的操作费用。
第二种类型记录系统是OBS系统,其中传感器装置和电子装置被抛锚在海底上。该装置使信号数字化和通常利用电缆传输数据到无线电单元,该无线电单元固定到抛锚的电缆并浮动在水面上。浮动的发射器单元发射数据到记录地震数据的水面船舶上。在地震探查中,通常部署多个发射器单元。
第三种类型地震记录装置是称之为海底地震记录仪(SSR)的OBS系统。这些装置包含密封的传感器装置和电子装置,并记录海底上的信号。数据的检索是通过从海底上取回该装置。这种装置通常是可再用的装置。本发明的重点是SSR型OBS系统。
SSR型OBS系统一般包括一个或多个地震检波器和/或水听传感器,功率源,地震数据记录仪,晶振时钟,控制电路,以及在利用有常平架的地震检波器和记录剪切数据情况下,还包括罗盘或常平架。除了通过电缆从外部提供功率以外,功率源通常电池组。在现有技术OBS系统利用机载电池而不是外部电缆提供功率时,现有技术电池是铅酸电池,硷性电池或不可再充电的电池。所有现有技术的OBS系统通常要求,能够打开各种单元以便进行各种维护,质量控制和数据提取活动。例如,从现有技术单元中提取数据要求,能够打开或拆卸各个单元以便提取数据。同样地,必须打开该单元以便替换废旧电池。
关于OBS系统的定时功能,在传感器数据的定时与地震能源的触发之间的同步是重要的,为的是使地震源事件与反射事件匹配。在过去,OBS系统中一直使用各种晶振时钟以实现这种功能。晶振时钟是相对地廉价和准确。然而,这种现有技术时钟的一个缺点是,时钟晶体受到重力和温度的影响。这种重力和温度的影响可以使振荡器频率发生频移,从而导致地震数据的误差。此外,由于晶体受到重力的影响,OBS系统的取向可以影响时钟的运行。由于时钟通常是固定在OBS装置内,为了使OBS系统在海底上合适取向时有正确的取向,OBS系统在海底上的任何取向误差可以导致时钟的不准确性。最后,这种时钟往往有漂移和时移的特征,这是由于温度变化和时效造成的,它同样可以导致被记录地震数据的不准确性。虽然可以对温度老化和时移得到的数据进行数学修正,但是现有技术的装置不能修正重力对晶体时钟的影响。至多,现有技术仅能修正温度对晶体时钟的影响。
较现代的OBS系统还可以包含用于校正倾斜的机械装置,即,常平架。常平架是这样一种装置,它允许沿一个或多个方向作自由的角运动,并可用于确定OBS系统在海底上的取向。常平架产生的取向数据可用于调整地震检波器记录的地震数据。在现有技术利用常平架的情况下,它们往往是作为地震检波器中的一个部分,称之为“常平地震检波器”。这些现有技术机械常平架的一个缺点是该装置所允许的有限角度取向。例如,至少一种现有技术装置允许常平架有360°的转动,但常平架的俯仰角仅局限于30°。在这种装置中,为了能使这种现有技术常平架正确地运行,OBS系统本身必须停放在海底上的基本理想位置。为了使OBS系统至少基本上不是沿水平方向取向,例如,朝上或朝下,现有技术的机械常平架就不能正常地工作。机械性质的其他常平架装置不局限于30°,然而,在这种机械常平架装置中,该装置中的机械阻尼可以破坏被记录信号的保真度。最后,地震检波器的常平架装置是昂贵的,并且比没有常平架的地震检波器要求更多的空间。在利用多个地震检波器的OBS系统中,由于它的尺寸和空间要求,给地震检波器安装常平架是不切实际的。
关于取向,OBS系统在海底上的定位对于正确地解释该系统记录的地震数据是必需的。被处理数据的准确性部分地取决于处理该数据所用定位信息的准确性。由于常规的定位装置,例如,GPS,不能在水环境下工作,在海底上建立OBS系统定位的传统现有技术方法包含声纳设备。例如,在声纳系统中,OBS装置可以利用脉冲信号以确定它的位置。在任何的情况下,被处理数据的准确性直接地取决于确定OBS系统的定位精确度。因此,理想的是,我们需要利用这样的方法和装置,它产生可靠的定位信息。同样地,我们还需要确保可以实现OBS装置在海底上的预期定位。
关于上述OBS系统的运行,现有技术系统通常要求一些外部产生的控制命令,为的是起动和获得每次拍摄的数据。因此,地震接收器单元必须实际连接到中央控制记录站或可以通过无线技术进行“连接”。如上所述,专业人员能够明白,某些环境可以对连接和控制检测器的常规方法造成很大的挑战,例如,拥挤或深的海洋区域,崎岖的高山区和丛林。在某些情况下还可以出现各种困难,其中需要定期地移动接收器阵列以覆盖较大的区域。
不管是利用实际的电缆或通过无线技术,每种类型的连接有它自身的缺点。在电缆遥测系统中,大的阵列或长的浮筒导致大量的电缆铺设,这是昂贵的,而且很难处理,部署或进行操作。在使用海底电缆铺设的情况下,在超过500英尺的深水中,腐蚀的环境和高的压力往往需要昂贵的电缆保护外套。此外,常规的电缆铺设还需要在电缆与传感器单元之间有实际的连接。在电缆上利用硬线连接传感器往往是不切实际的,较普通的技术是利用电缆与传感器之间的外部连接使电缆与传感器连接。这种在电缆与传感器之间的连接是特别脆弱的,特别是在腐蚀和高压的海洋环境下。当然,利用通过电缆连接在一起的系统,给传感器提供功率,使传感器与拍摄时间以及传感器之间的同步,和控制传感器是十分容易的。
应当注意,不管是电缆或无线系统,其中需要铺设外部电缆以连接设备的传感器装置与该单元中的记录和/或无线电遥测装置,它存在许多上述的缺点。具体地说,现有技术的OBS系统包括安装在运输器上分开的检测和记录/无线电遥测单元装置。分开的单元有通过电缆连接在一起的外部连接器,它们具有与在水面上的中央控制的电缆相同的问题。各个检测单元,即,地震检波器,与其余电路部分之间分开的主要原因是,需要确保地震检波器被有效地耦合到海底。
在利用无线技术或传感器的运行是通过预编程的情况下,传感器的控制变得更加困难。例如,确保记录操作与拍摄定时同步是十分重要的,因为各个传感器没有通过导线连接在一起。因此,需要有上述准确的机载时钟。在这一方面,在合适的时间激励用于检测和记录的每个单元必须与拍摄同步。确保各个单元有足够的功率也是我们所关心的问题。许多现有技术的专利集中讨论各种技术和机构,用于在数据收集和记录期间给传感器供电以及在休眠期间关闭传感器的电源。
人们已经提出各种措施以克服上述的缺点。例如,在USPatent No.5,189,642中描述一种海底地震记录仪。这个专利公开一个长的竖立机架,它是由空间隔开的水平环形板通过垂直支架件连接构成。每个支架件是由互相可滑动的嵌套管子构成,并利用夹具机构互相固定。平衡环可拆卸地固定到下平板。地震检波器装置也固定到下平板。泡沫浮标固定到上平板。控制装置从上平板向下延伸。控制装置内安装功率源,地震数据记录仪器,罗盘和控制电路。外部硬线电路连接控制装置与地震检波器。该系统不利用任何的硬线通信链路到海面监测站,而是利用声音或预编程装置以控制该单元。在释放到水中时,假设平衡环可以提供足够的质量,用于保持该系统竖立并在下沉之后耦合地震检波器到海底。为了减小波或水流运动产生的地震检波器噪声作用到浮标和控制装置的可能性,一旦该系统耦合到海底,释放每个支架的夹具机构,从而允许控制装置和浮标向上滑动到嵌套支架,使地震检波器与该系统的其他部分隔离。一旦完成地震记录,从机架上释放平衡环,而该系统在平衡器的正浮力作用下可以上升到水面。声变换器,无线电信标和闪光灯可用于定位和取回该系统。
在US Patent No.6,024,344中描述另一种海洋地震数据记录系统。该专利描述一种在深水中部署和定位地震数据记录仪的方法。在水面船舶上,数据记录仪固定到部署在水中的半刚性导线。由于导线的刚性,它的功能是在记录仪与沉入海底的导线之间确定一个固定的间隔。该导线还可以给相邻的记录仪之间以及记录仪与船舶之间提供电通信的功率和信号。一旦记录仪放置在合适的位置,它们是被预设的时钟或利用通过水或通过导线传输的控制信号激励。在完成数据收集之后,取回导线和记录仪。部署是利用放置在水面船舶上的缆线机完成的。如‘344专利中的图1所示,当船舶是沿离开导线和记录仪的方向运动时,部署操作发生在船舶的船尾。这个专利还描述需要按照顺序的方式存放记录仪,为的是便于在数据收集期间部署和跟踪OBS系统的海底位置。
GeoPro提供一种独立的OBS系统,即,没有电缆的OBS系统,它是由430mm直径的玻璃球构成,其中包含该系统的所有电路元件,包括:电池,无线电信标,地震数据记录单元,声释放系统,深海水听器,和三个安装常平架的地震检波器。玻璃球安装在加重的导轨上,它可以抑制玻璃球的浮力并使OBS系统抛锚到海底。地震检波器放置在与导轨邻近的玻璃球底部。为了在完成数据收集之后恢复OBS系统,发射声命令信号到玻璃球并被深海水听器检测。该信号激励声释放系统,它可以使玻璃球与保持在海底的在加重导轨分离。在玻璃球的正浮力作用下,自由浮动系统上升到海面,其中无线电信标发射用于定位和取回玻璃球的信号。这种具体设计的一个缺点是,地震检波器没有直接耦合到海底。相反,被地震检波器记录的任何地震信号必须传输通过导轨和玻璃球的底部,在这种情况下,该地震信号经受上述的噪声和其他的失真。应当注意,这种组合设计代表现有技术中利用的许多圆柱和球体形状,因为众所周知,这种形状对于经受在海洋环境下可能发生的高压是更有效。
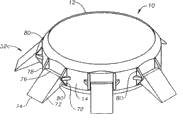
K.U.M.和SEND提供一种没有电缆的OBS系统,它包括在顶部的杆和在底部形成三脚架的框架。泡沫浮力装置固定到该杆。一个锚固定到三脚架的底部并把框架固定到海底。安装在框架的三脚架部分上的压力圆柱包含地震记录仪,电池和释放系统。水听器固定到框架上,为的是从海面上接收命令信号并激励释放系统。可枢轴转动的起重机臂也固定到框架上,而起重机臂可释放地固定到地震检波器单元。在部署时,起重机臂最初保持在垂直的位置,而地震检波器单元固定到起重机臂的自由端。当框架接触到海底时,起重机臂从框架中伸出,并释放地震检波器单元到离框架系统约1米的海底上。硬线允许在地震检波器单元与记录仪之间实现电通信。地震检波器单元本身是直径约为250mm的非对称圆盘,它的一个侧面是平坦的,而另一个侧面是拱顶形状。地震检波器单元的平坦面上有槽沟,并在被起重机臂释放时接触到海底。在完成数据收集之后,一个声信号激励释放系统,它可以使锚与框架系统分离。泡沫浮力装置可以使框架系统和地震检波器上升到海面,其中利用无线电信标定位和取回该系统。
SeaBed Geophysical出售命名为CASE的无电缆OBS系统。这个系统包括:控制单元,即,电子装置,和由电缆互相连接的节点单元或地震检波器。控制单元和节点单元安装在长的框架上。控制单元是一个管状体,它包含电池,时钟,记录单元和应答器/modem,可以与水面进行水声通信。节点单元包括:地震检波器,水听器,倾斜仪和可替换的套筒,其中套筒在水听器以下形成向下开口的圆柱形。节点单元与长的框架和控制单元是可分离的,但是经外部电缆保持与控制单元的通信。这种管状体的使用可以代表现有技术的设计,因为系统的外壳必须设计成可以经受该装置所承受的高压力。在部署期间,整个单元下降到海底,其中远程操作的车辆(与OBS系统分开的)用于使节点单元与框架脱离,而使节点单元放入到海底,从而推动开口的套筒进入海底沉积物。长的框架包含一个可以固定部署和取回电缆的环。利用通信变换器和modem控制该系统并发射地震数据到水面上。
每个参照的现有技术装置都有现有技术中的一个或多个缺点。例如,US Patent No.5,189,642的OBS系统以及GeoPro和K.U.M./SEND的装置是直立的系统,每个系统有相对高的垂直断面。因此,被这些系统收集的地震数据经受作用到该装置上水运动产生的噪声。此外,我们观察到,在这种高断面OBS系统下海底运动产生的剪切运动可以造成OBS系统的岩石运动,特别是从单元的底部到顶部的平移运动,从而进一步降低被记录数据的保真度。此外,这些现有技术装置都是非对称的,因此,它们的位置仅可以有单一的取向。通常,这是通过特别加重OBS运输器的一端实现的。然而,这种装置可能必须通过几百英尺海水并接触到往往是崎岖不平的海底,该海底上可能散布各种碎片。所有这些因素可以导致系统在放入海底时有不正确的取向,从而影响该系统的运行。例如,在这种现有技术OBS系统是由它的一个侧面安放的情况下,地震检波器根本不与海底耦合,从而使该装置不可使用。此外,不正确的取向可能干扰系统的释放机构,从而破坏该系统的恢复。
这些现有技术系统的高断面也是不理想的,因为这种单元很容易被缠绕到捕鱼线,捕虾网,各种类型缆线或其他的碎片上,它们可能就在地震记录活动的邻近区域内。
另一方面,具有较小断面的现有技术系统,例如,海底电缆,往往具有弱的耦合能力或在放置时需要利用昂贵的设备作为辅助装置,例如,ROV。海底电缆的伸长形状可以导致仅在单个取向上有“良好的”耦合,即,沿电缆主轴的取向。此外,即使沿它的主轴,但由于电缆与海底之间实际接触面积很小,耦合因崎岖不平的海底或海底附近的其他障碍物而受到损害。
这些现有技术系统的另一个缺点是,需要激励和去激励用于记录和运行的单元。这通常需要一个来自水面船只的控制信号,一般是通过声传输或通过从水面到该单元延伸的电缆。任何类型的外部控制是不理想的,因为它要求在系统中的信号传输和附加的元件。虽然声传输可用于某些数据的传输,但是它对实现同步的目的通常是不可靠的,因为存在未知的传输路径变化。当然,用于传输电信号的任何类型控制信号是不理想的,因为它增加单元处理和控制的复杂性并需要外部的连接器或耦合。在深海地震探查的高压和腐蚀环境下,这种电缆和连接器对于泄漏和故障是特别灵敏的。
类似的问题还出现在这样一些单元中,它们利用外部电线连接该单元的分布元件,例如,在US Patent No.5,189,642所公开的或类似的装置中,其中地震检波器装置是与电路装置分开的。此外,在系统的电子元件是分布式的情况下,系统的故障可能性就增大。
许多现有技术系统还利用无线电遥测技术,而不是利用机载单元记录数据以收集数据。当然,这种系统有无线电传输特性所强加的限制,例如,无线电频谱特许的约束,距离限制,视线遮挡,天线限制,数据速率限制,功率约束,等等。
利用浮力装置取回的那些OBS单元是不理想的,因为典型的去耦装置使该单元增加额外的费用和复杂性,通常必须进行激励以释放该系统到水面上。此外,这种系统通常丢弃部分的单元,即,加重的锚或导轨,从而使它成为海底上的碎片。在部署期间,由于它们是自由浮动的,这种系统很难定位在海底上的理想位置。虽然上述的故障是由于错误的取向,但是在取回时,尽管存在无线电信号和信标,自由浮动的系统很难定位和在海上迷失。同样地,在强浪的情况下,这些单元是很难控制的,通常要与水上航标或船只发生碰撞,给系统带来潜在的危险。
在这相同的情况下,在部署和取回时对各个单元的控制是很困难的。在利用刚性或半刚性缆线系统以固定距离和定位各个记录单元的情况下,这种缆线不是柔软的,重量很大并很难操作。这种缆线不允许在部署时进行校正。例如,如上所述,理想的网格布局可以识别沿直线的各个单元的具体位置。若布局船只漂移或使缆线铺设在离开预期直线的位置上,则必须重新定位水面上的船只,使它返回到那条直线上。然而,由于缆线的刚性,缆线的错误定位部分可以使该电缆上的所有其他单元偏离预期的直线。
此外,在现有技术中取回电缆利用的当前步骤容易使缆线受到不适当的应力。具体地说,从海底取回缆线的广泛可接受的方法是返回到直线上,或驱动船只到在船头上取回缆线的直线上。这种方法是不理想的,因为必须仔细地调整船只的速度和缆线绞盘的速度,为了使缆线上没有过大的张力或拉力。这种调整往往是困难的,因为各种外来的因素作用到船只上,例如,风,波浪和水流。不能控制缆线的张力或拉力可以影响曳拉整个长度电缆线以及与它固定的单元,从而损伤整个缆线和所有的单元。这种方法的另一个缺点是,若船只运动太快,它可以造成缆线松弛,并使缆线在船只下漂浮,可以被缠绕到船只的推进器中。
最后,在现有技术中都没有描述一种用于处理上述OBS单元的后甲板系统,不管它是单元的存放或单元的部署和取回。随着深水地震记录仪阵列的尺寸变得越来越大,需要一种包括这种阵列用于有效存放,跟踪,服务和处理几千个记录器单元的系统变得更加重要。添加的水面船舶是昂贵的,以及需要有操作船舶的人员。添加的人员和船舶还增加事故和受伤的可能性,特别是在天气可以迅速恶化的公海环境下。
因此,理想的是提供一种不需要外部通信/电源电缆的地震数据收集系统,或者从水面上或者在地震数据收集单元本身,而不是操作任何类型的外部控制信号。换句话说,该单元应当在“drop andforget”的基础上运行。同样地,该装置应当是容易地操作,不需要打开装置以完成诸如数据提取,质量控制和功率补充的活动。该装置还应当设计成能够承受深水海洋应用中普遍存在的腐蚀和高压力环境。该单元应当配置成尽量减小海流的噪声和尽量增大该装置与海底之间的耦合。在这相同的情况下,该装置应当设计成有正确的取向,可以使该装置在接触海底时有最大的耦合,而不需要诸如ROV的外部设备的辅助,并减小不正确取向的可能性。同样地,该装置应当不容易被捕虾网,捕鱼线缠绕。
该装置应当包含对取向不灵敏的定时机构。类似地,取向应当不影响地震检波器的常平操作。
该装置应当是容易被部署的,而且还能够放置在有高可信度的某个位置上。同样地,该装置是容易地被取回,它不需要浮动装置或释放机构,而且在取回时该单元的部件不应当遗留在海洋中。此外,应当有这样的装置和取回过程,它在连接地震单元的缆线时可以减小潜在损坏的张力。
还应当提供一种容易处理几百或几千个记录器单元的系统,该单元包括部署在海洋环境下的一个阵列。这种系统应当能够部署,取回,跟踪,保持和存放各个记录器单元,与此同时,可以减小人力和附加水面船舶的需要。该系统在这种活动期间应当尽可能减小对各种单元的潜在损坏。同样地,该系统中需要包含各种安全装置,它可以减小对操作记录器单元的人员的伤害。
发明内容
本发明提供一种用于收集海洋环境下地震数据的系统,其中通过部署多个连续工作的无线,独立的海底传感器单元或容器,每个容器的特征是对称的,浅断面箱体,和独特的外部缓冲垫,可以提供海底耦合并防止被捕鱼网缠绕。利用柔软的非刚性,非导电的缆线,各个容器之间可以互相固定,缆线用于控制容器在水下的部署。该容器是从海洋船舶的独特配置的甲板上被部署和取回的,其中甲板上有传送带系统和处理系统,各个容器可以与非刚性缆线固定和分离。在一个实施例中,作为部分的甲板配置,各个容器是以自动电唱机方式被随机地存放在开槽架上。当存放在开槽架内时,可以检索该容器在以前记录的地震数据,并可以对该容器充电,测试和再同步,且在不需要打开容器的条件下,可以再起动它的运行。在部署和取回期间,可以处理非刚性缆线和固定到缆线上的容器,借助于水面船舶的运动,可以减小被部署的缆线内形成张力的可能性。这包括独特配置的非刚性缆线系统,它设计成在缆线中已达到某个张力水平时可以自动地剪切分开。
更具体地说,每个单独的传感器单元包括圆盘状的不透水箱体,该箱体是由两个平行圆形平板构成,在它们的边缘是用浅侧壁连接在一起,从而形成一个围绕圆板的轴对称的封装,和相对于圆板的直径有非常浅的断面,其形状很像一个车轮。该箱体是从内部被支承的,可以在外部压力下保护箱体的完整性,并在单元箱体与地震检波器之间提供坚实的机械耦合。在本发明的一个实施例中,该单元有这样的配置,它可以与海底有效地耦合并收集地震数据,不管圆板侧面是在哪个位置,从而排除现有技术中的许多取向问题。该圆板可以包含脊纹,凸台,或槽沟,为的是增强与海底的耦合。
在一个实施例中,在该单元浅壁的周围设置一个缓冲垫,缓冲垫的截面设计成迫使该单元是停放在该包装的一个圆板侧面上,从而导致该单元与海底之间形成紧密的耦合。在至少一个实施例中,提供的缓冲垫设计成可以防止该单元被捕虾网或捕鱼线缠绕。
该单元利用几个用于连接到缆线的不同装置。在一个实施例中,每个单元包含一个偏心的闭锁机构,允许该单元固定到缆线上。在另一个实施例中,固定夹是在箱体侧面的偏离中心的位置上。在另一个实施例中,固定夹是在形成箱体的单元中一个圆板的中心位置上。
该单元是独立的,因此,所有的电子元件设置在箱体内,它包括:多向地震检波器装置,地震数据记录装置,功率源和时钟。
在本发明的一个实施例中,时钟是铷钟。铷钟对于温度或重力效应或该单元在海底上的取向是很不灵敏的。
在另一个实施例中,该单元包含晶体时钟和倾斜仪。最好是,机载单元利用倾斜仪对晶体时钟的重力效应进行实时校正。
功率源最好是在密封环境下工作的可再充电的电池,例如,锂离子电池。
包含倾斜仪的单元还可以利用倾斜仪数据以完成晶体时钟校正以外的各种功能。例如,本发明的一个特征利用倾斜仪数据进行数学平衡。具体地说,在本发明中,利用倾斜仪数据,从数学上完成地震检波器的平衡,因此,它与单元的取向无关,如同机械常平架。
当然,倾斜仪数据也可用于确定一个单元在海底上的位置,这在现有技术中是经常利用这种数据。然而,与现有技术装置不同,本发明的一个特征是按照时间连续的方式得到和利用倾斜仪数据。一旦在地震记录开始时,现有技术单元通常仅仅确定单元的位置。但是,我们观察到,单元的位置在部署过程中可能发生变化,因为该单元受到诸如水流,虾线等外力的影响。因此,在本发明中,测量的倾斜仪数据作为时间的函数。这是在运行期间通过多次完成的,所以,可以根据需要校正地震数据。
关于倾斜,定时或类似数据的校正,这些数据可以影响被收集的地震数据的准确性,所有的现有技术装置是在处理中心进行这种校正。没有一种现有技术装置是在部署时或在部署船舶上利用机载单元作这种校正。因此,本发明的一个方法是在部署的同时利用机载单元作这种校正。
该单元还可以包括:罗盘,水听器,声位置变换器,和/或一个或多个加速度计。罗盘数据可以给每个单元提供相对于参照系的参照系数据,用于总体探查。在本发明的一个实施例中,诸如加速度计的传感器用于跟踪单元在下降通过水柱并停留在海底时的位置。具体地说,这种传感器提供惯性导航数据并在该单元传输通过水柱时记录x,y和z位置的信息。这个位置信息以及初始的位置和速度信息用于确定该单元的最终位置。
在本发明的另一个特征中,该单元是在地震船舶上时被激励,而一旦被从海洋上拉出时被去激励,因此,它是在从部署时间之前到取回时间之后连续地获取数据。同样地,在一个实施例中,该单元是在部署到水中之前开始记录数据。被激励并在部署在水中之前开始记录的系统是在需要信号检测的时间之前被稳定。这可以减小电子元件运行的变化状态干扰信号检测和记录的可能性。
在本发明的另一个特征中,地震数据记录装置包含卷绕式存储器,即使不在使用时,也连续地记录。这可以避免起动或开始指令的需要,从而确保该单元在所需的记录时间内是稳定的,并作为以前记录的后备数据,直至以前的数据被覆盖为止。只要时钟是同步的,这种记录装置在任何时间都准备部署。此外,诸如数据收集,质量控制测试和电池充电的例行操作可以在不中断记录的条件下进行。在这种连续记录单元的情况下,该单元可用在陆地上或海洋环境下。
非刚性缆线的使用是本发明的另一个特征。虽然在很早的现有技术中已使用绳索作为水面浮动地震装置的牵引索,在此之前,在OBS系统互相连接的情况下,现有技术仅利用刚性或半刚性钢丝绳。现有技术OBS系统使用钢丝缆线的一个理由是需要电路互连该系统。然而,在本发明中,使用非刚性缆线是因为上述的容器是独立地工作的,它不需要与外部的通信或连接。本发明的非刚性缆线最好是由合成纤维材料制成,例如,聚酯,并利用保护性压模包层封装,例如,聚氨基甲酸酯箱体。在一个实施例中,非刚性缆线是由12股编织的聚酯内芯构成。压模上有肋骨或槽沟以减小在水中的阻力。
本发明的非刚性缆线在容器的独特部署方法中也是有用的。具体地说,非刚性缆线仅有轻微的负浮力。当缆线固定在两个容器之间时,每个容器远的负浮力远大于缆线的负浮力,当两个连接的容器下沉通过水柱时,非刚性缆线上的拉力远远大于作用在单元上的拉力,因此,它可以作为减速伞或制动器,从而使容器的下降减慢并使容器保持在竖直位置。这对于必须放置在特定取向的单元是特别理想的,例如,有非对称缓冲垫配置的那些容器,因为当缆线固定到顶板上中心安装的连接器时,在它向下穿过水柱并停留在海底过程中,它的功能是保持单元的取向。此外,由于本发明的缆线是非刚性的,相邻容器之间的缆线是松弛的。船舶驾驶员可以利用这种松弛的缆线,在部署容器时校正下降的位置。
同样地,非刚性缆线可以增强本发明的独特取回方法,其中当船舶是顺缆线驱动时,缆线是在船舶的尾部被取回。这样一来,水在缆线上产生的拉力可以使缆线减速到船舶之后,从而减小对缆线的过大张力,并确保缆线不太可能被缠绕到船舶的推进器中。
在本发明的一个实施例中,在地震船舶的甲板上,存放系统包含一个有多行和多列槽沟的存放架,该存放架设置成可以放置各个单元。每个槽沟包含通信端口,因此,当单元放置在槽沟内时,该单元通过通信端口与主控制站联系。通过该端口,可以下载在该单元上记录的信息,单元电池可以被充电,可以在该单元上进行质量控制检查,可以重新启动记录操作,以及该单元可以被重新激励。在本发明的另一个实施例中,存放系统包含重叠的U形旋转式传送带。每个传送带包含辊筒,允许记录单元沿着旋转式传送带的路径按照传送带方式运动,直至该单元到达通信端口的邻近。不管利用哪种存放系统,存放系统可以配置成有标准的8’×20’×8’的集装箱尺寸,因此,可以容易地利用标准的集装箱船只运输装载的存放系统和任何地震单元。
每个单元可以包含独特的识别装置,例如,射频识别(RFID)标记或类似的识别标记,当这些单元是在甲板上时被处理时,可以对它们进行跟踪。同样地,如上所述,每个单元包含声位置变换器或加速度计,用于确定单元在海底上的位置。由于各个单元是独立的,与识别标记相关的位置信息允许这些单元是随机地被插入到存放架上,但是按照该单元在海底上的以前位置,允许检索和顺序排列多个单元的数据。因此,不需要保持这些单元是顺序排列的。在接收器线上已经相邻的各个单元在存放架上的存放不必是相邻的。
此外,在甲板上总体部署和取回各个单元基本上是自动进行的。甲板配置包括与存放架相邻并延伸到与水面相邻的甲板边缘的传送带系统。机器臂用于在存放架与传送带之间移动各个单元。在一个实施例中,放置的缆线机和缆线盘/箱是为了放开非刚性缆线,为了使它与传送带系统相邻并在船舶的侧面。当各个单元放置在固定到非刚性缆线的传送带系统上时,允许在运行时固定各个单元。此外,专业人员可以明白,缆线的放开速度不是恒定的,因为船舶通过水面的运动不是恒定的,即使是在风平浪静的海面上。因此,为了避免在缆线中出现太大的张力,它可以导致缆线的破坏和单元的曳行,以及为了使单元准确地停放在海底上,不断地调整放开缆线进入水中的速度,用于补偿船舶在水上的错误和不可预测的运动。因此,必须连续地调整装载固定到缆线上的各个单元的传送带速度。
在本发明的另一个实施例中,传送带是与被缆线机放开的缆线相交。在相交点,地震单元固定到缆线,而被固定的单元随后被释放到水中。在固定站下游的缆线夹是在单元固定之前牢固地抓住缆线,从而在该单元固定到缆线时去掉上游缆线的张力。缆线夹可以包含释放系统,它要求操作员使用双手打开缆线夹,从而减小该操作员在释放单元时的危险,并使上游缆线再次是在张力下。
关于缆线中的张力,缆线是被分段的,且利用独特设计的断开连接器使各个缆线段互相连接。该连接器包括互相嵌套的第一装配件和第二装配件。每个装配件固定到缆线段的一端,因此,当各个装配件互相固定在一起时,多个缆线段形成较长的一段缆线。若缆线中的张力大于剪切销的剪切限制,则剪切销就断开,并使缆线分开。
此外,虽然本发明的一个实施例利用夹具机构,它允许各个单元直接被夹住到一段缆线上,本发明的另一个实施例利用固定缆线的套筒。夹具机构可以固定被模压台肩限定的套筒。在相邻一段缆线之间的固定台肩在现有技术中是普遍的,但本发明的套筒可以被夹住或放置在一段缆线周围并固定,而不需要切割缆线。在该实施例中,套筒被固定到缆线上是借助于插入销钉通过套筒和缆线,它是在垂直于缆线轴的x和y平面上。台肩是在每个套筒的两端被模压到销钉上。虽然在套筒的相对两端上的模压可用于限定沿套筒的固定区,但是套筒可以包含喇叭口,可以进一步限定这种固定区。附图说明图1是本发明地震记录单元的剖面图。图2是图1所示单元的前视图。图3是图1所示单元的后视图。图4是图1所示单元的顶视图。图5是有圆形缓冲垫剖面的单元的后视图。图6是有楔形缓冲垫剖面的单元的后视图。图7是有图6所示楔形缓冲垫的单元的顶视图。图8是有铰接式单元的立视图。图9是非刚性缆线的剖面端视图。图10是剪切销连接器的剖面侧视图。图11是图10所示剪切销连接器的立视图。图12是容器固定缆线套筒的剖面侧视图。图13是图12所示固定套筒的立视图。图14是地震系统部署和取回船舶的侧视图。图15是说明自动的速度匹配的容器下水系统和容器存放系统的后甲板布局。图16是自动电唱机方式存放架的侧视图。图17是图15所示甲板布局的端视图。图18是图15所示甲板布局的立视图。图19是说明半自动容器固定系统的后甲板布局。图20说明一种在船尾上的容器取回方法。图21说明在部署期间固定到非刚性缆线的多个单元。
具体实施方式
在本发明的详细描述中,采用相同的参考数字指出相同的部件,为了简化描述,可以省略诸如固定件,装配件等的各项部件。然而,专业人员应当明白,根据需要可以采用这种普通的部件。
参照图1,图1表示本发明的地震数据收集系统或容器10。容器10是由不透水的箱体12构成,不透水的箱体12有限定内部不透水分隔室16的侧壁14。在分隔室16内至少设置一个地震检波器18,时钟20,功率源22,控制机构23和地震数据记录仪24。在该实施例中,容器10是独立的容器,因此,功率源22可以满足容器10的所有功率需要。特别是,功率源22给水下部署的地震数据收集系统提供全部的功率。同样地,控制机构23可以提供容器10的所有控制功能,它不需要外部的控制通信。容器10有负浮力的重量,因此,它在水柱中部署时,可以沉到海底。
专业人员可以理解,容器10是独立的地震数据收集系统,为了记录地震数据,它不需要外部的通信或控制。还应当注意,地震检波器18是安装在容器10内,因此,它不需要外部的布线或连接。已经证明,利用以下详细描述的实例设计,地震检波器18可以有效地耦合到海底,因此,通过容器10传输到达地震检波器18的地震数据不会受到干扰而被破坏。
虽然以上已描述各个基本的单元,容器10还可以包含罗盘36和倾斜仪38。此外,在该优选实施例中,地震检波器18是由三个地震检波器构成的检波器组合,用于检测沿x,y和z轴中每个轴的地震波。除非具体地说明,本发明中利用的地震检波器包含常规的地震检波器以及用于检测地震波的其他已知装置,它包括,但不限于,加速度计。
在本发明的另一个实施例中,我们发现,利用在四面体配置上放置的四个地震检波器是有利的,每个地震检波器测量多个平面上的数据。在标准的三维配置中,三个地震检波器放置成互相隔开90°,和每个地震检波器测量单个x,y或z平面上的信号。在四个地震检波器的配置中,地震检波器的取向是垂直于四面体的平面,因此,每个地震检波器测量在x,y,z坐标系统中多个平面上的信号。例如,一个地震检波器测量x平面和z平面上的地震数据。四个或多个地震检波器的地震检波器配置是理想的,因为它们在特定平面上地震检波器故障的事件中可以提供地震单元的冗余度。现有技术OBS系统中没有一个系统是利用四个或多个地震检波器按照这种方式检测地震数据。
在本发明的一个重要特征中,时钟20是铷钟。在此之前,在地震探查中没有使用过铷钟,部分的原因是,它的价格高于传统的晶体驱动时钟。然而,因为本发明的容器10试图在几个取向的一个取向中能够最有效地工作,需要利用这样一种时钟,它对于取向效应是不灵敏的,取向效应可以妨碍传统的现有技术晶体时钟的运行。此外,铷钟对于温度和重力效应是较不灵敏的,这些效应可以妨碍现有技术时钟在海洋环境下的运行。
功率源22最好是锂离子电池。在现有技术OBS系统利用机载电池的情况下,不是利用外部电缆提供功率,现有技术电池是铅酸电池,碱性电池或非充电电池。现有技术的OBS系统没有利用锂离子电池。然而,由于本发明容器的密封和独立性质,需要利用这样的电池,例如,锂离子型电池,它不排出烟雾,而且是容易充电的。
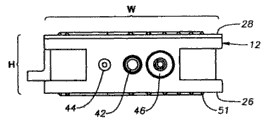
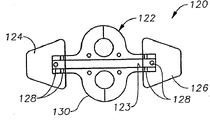
在图2和3中,可以理解容器10的一个特征,即,容器10的浅断面配置。具体地说,箱体12包括第一平板26和第二平板28,它借助于侧壁14沿着它们的边缘连接在一起。在一个实施例中,平板26和28是圆盘状,因此,箱体12的总体形状是轮子的形状。可以理解,在任何情况下,可以理解每个平板26,28的特征是宽度(W),而侧壁14的特征是高度(H),其中平板26,28的宽度W大于侧壁14的高度H。当然,在平板26,28是圆盘状的情况下,应当用直径D代替宽度W。然而,为了便于描述浅的断面,不管箱体12是圆形并用直径D描述或用高度H描述,浅断面的特征是相同的。虽然没有限制总的浅断面,但是,在一个实施例中,高度H不大于宽度W或直径D的50%。在一个非限制性例子中,容器10的高度H约为6.5英寸,而容器10的宽度/直径约为18.5英寸。
如在附图中所示,容器10基本上是围绕它的x轴和y轴是外部对称的,因此,在部署容器10时,容器10的取向是不重要的,它可以停留在任何一个侧面30,32上,仍然可以有效地耦合到海底。因此,与现有技术OBS系统比较,它设计成仅在一个“竖直”位置上安放到海底。此外,由于容器10有浅的断面,它在边缘34上的平衡通常是不稳定的。因此,只要容器10的边缘34接触到海底,容器10就会倾翻并安放在两个侧面30,32中的一个侧面上。
容器10还包含用于支承平板26,28的内肋33,因为容器10需要承受海洋环境的高压特性。内肋33可以防止平板26,28的“颤动”或运动,否则会造成与地震波检测的干扰。与现有技术不同,此处描述的容器10实际上是一个地震检波器的箱体,因此,地震波可以不受畸变地传输通过容器的平板到达地震检波器18。在这一点上,由于容器10有浅的断面和坚实的性质,地震检波器18在箱体12内的固定点变得不重要,从而可以克服与现有技术设计相关的问题。
每个单元可以包含唯一的识别装置,例如,射频识别(RFID)标记40或用于跟踪各个单元的类似识别标记,如果它们是在甲板上按照以下描述的方式进行处理。同样地,每个单元可以包含声位置变换器42,可以确定该单元在海底上的位置。
图1还画出用于测量压力的水听器44和可以与容器10通信的连接器46,如果容器10是在甲板上或设置在以下描述的存放架上。连接器46可以是标准的销钉连接器,或可以是红外或类似的连接器,它在与容器10通信时不需要硬的连线。借助于连接器46,可以对容器10提供服务而不需要取下一个平板26,28或打开箱体12。具体地说,连接器46可以进行质量控制测试,提取被记录的地震数据,使时钟20同步和再充电功率源。因为连接器46仅仅是在水上使用的,还可以提供不透水,抗压力的连接器罩47以保护连接器46。利用这种连接器罩47,连接器46可以是满足该容器所需功能的任何标准连接器。连接器46可以不是那种通常要求承受高压,腐蚀环境的外部连接器。
最后,图1表示任选的固定夹48,用于夹住和操作容器10。固定夹48放置在箱体12上,因此,固定夹48与从容器10延伸的任何硬件,例如,变换器42或水听器44,之间的径向角是钝角或锐角。在所示的实施例中,径向角是锐角。具体地说,在部署或取回诸如容器10的装置之后,在操作容器时,这种装置可以撞击船只或其他设备的侧面,它有可能破坏从这些装置伸出的硬件。通过放置固定夹48到箱体12的边缘上,因此,从箱体12的中心延伸通过固定夹48的径向轴小于90°,它与从箱体12的中心延伸通过变换器42的径向轴分开,可以减小这个硬件遭破坏的可能性。
在本发明的一个实施例中,它不包含固定夹48,而是闭锁机构固定到侧壁14,最好是在这样的位置上,可以减小从容器10凸出的设备遭破坏的可能性。一种有效的闭锁机构是有相对夹爪的偏心闭锁机构,它可以被打开和闭合,允许该单元固定到用于部署的缆线上。闭锁机构还可以倾斜地固定到侧壁14,所以,闭锁机构的主轴与容器10的z轴不相交。而且,这种取向还可以保护从容器10凸出的硬件。
图4表示一个或两个圆板26,28的外表面50。具体地说,外表面50上可以有凸台51,例如,脊纹或槽沟,用于增强容器10与海底之间的耦合。在所示的实施例中,凸台51在表面50上形成回纹状图形。
图4和5还画出一个固定夹54,用于夹住和操作容器10,因此,当容器10是被与固定夹54固定的缆线下降通过水柱时,圆板26,28可以基本保持水平的位置。因此,固定夹54可以是在一个圆板26,28的中心轴上,或放置在容器10的重心之上的一个圆板26,28上。
回到图4-8,本发明的一个特征是,在容器10的周围包含缓冲垫52。图4-8说明三种不同配置的缓冲垫52,其中的配置称之为缓冲垫52a,缓冲垫52b和缓冲垫52c。在任何一种情况下,缓冲垫52有几个功能。第一,当容器10的边缘34接触到海底上时,它的形状可以使容器10的两个表面30,32之一到达海底。缓冲垫52的另一个功能是保护容器10和任何的外部装置,例如,它可以是从箱体12凸出的变换器42。最后,缓冲垫可以有这样的形状,它可以避免容器10被捕虾网和捕虾链缠绕。在任何的情况下,缓冲垫52可以具有以上一些或所有这些功能。
如上所述,缓冲垫52可以有几种设计。在图5中,画出的缓冲垫52a是围绕箱体12设置的剖面图,而在图4中,看到的缓冲垫52a是容器10的顶视图。具体地说,缓冲垫52a有圆形或弯曲的断面55。如图所示,缓冲垫52a包含嵌入到槽沟58中的台肩56,槽沟58是由围绕箱体12的边缘限定。缓冲垫52a的一部分60延伸到箱体12的边缘之外,可以保护箱体12的边缘34。由于缓冲垫52a的圆形性质,如果容器10开始停放在海底上,则容器10滚动或倾斜到平板26,28的耦合面上,从而使平板26,28与海底保持垂直。此外,缓冲垫52a的功能可以保护容器10免遭震动,并在操作容器10期间可以保护操作员。
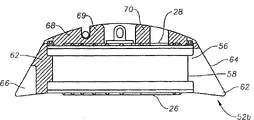
图6和7表示另一种缓冲垫断面,其中缓冲垫52b有楔形断面62。同样地,缓冲垫52b包含嵌入到槽沟58中的台肩56,槽沟58是由围绕箱体12的边缘限定。缓冲垫52b的一部分64延伸到箱体12的边缘之外,可以保护箱体12的平板26,28和边缘34。图6和7所示的缓冲垫52b还包含空腔66,空腔66可以用作握住和操作容器10的手柄。在缓冲垫52b的实施例中,可以理解,我们要求有缓冲垫52b的容器10在海底上有这样的取向,缓冲垫52b的楔形面向下。因此,在这个实施例中,平板28是容器10的顶部,而平板26是容器10的底部。
在图6和7的缓冲垫52b实施例中,附加的缓冲垫部分68安装在顶板28上。缓冲垫部分68有圆形断面70,它过渡到楔形断面62。在一个实施例中,玻璃珠可以模压或包含在缓冲垫部分68中,用于增加缓冲垫部分68的浮力。通过增加在容器10顶部的浮力,可以确保容器10有正确的取向,即,当容器10传输通过水拄并停放在海底上时,楔形缓冲垫52b是面向下。
当容器10耦合到海底时,链或其他的线可以被拉向容器10,该链只是沿着缓冲垫52b的楔形面滑动并到达容器10的顶部。缓冲垫部分68还可以防止链或线抓住任何的设备,该设备可能是从容器10的面向上的平板表面上凸出。
图8表示另一个实施例的缓冲垫52,其中缓冲垫52c包括有窄边74和宽边76的挡板或楔72。宽边76被固定,并绞接在两个固定夹78之间,固定夹78固定到箱体12的侧壁14。最好是,固定夹78有这样的形状,它们的外边缘80形成有楔72面的基本平坦的过渡面。在部署期间,容器10可以停放在任何一个平板面26,28上,而绞接的楔72下垂到海底,它形成斜面或套筒,当拉动容器10时,捕虾链或类似的线是在斜面或套筒上。按照这种方式,缓冲垫52c迫使链到达容器10的顶部,从而防止该链咬住容器10。
图9表示本发明的柔软,非刚性缆线82。具体地说,缆线82包括内芯84和外包层86。内芯84是由非刚性材料制成。在本发明中,非刚性材料是绞股或纤维状的非导电材料,例如,绳索。我们发现,合成纤维材料是优选的材料,虽然本发明也可以利用其他的材料。在一个非限制性例子中,合成纤维是聚酯。在一个实施例中,内芯84是由扭转的绳纤维形成的单个绳股88构成,其中绳股88被编织在一起形成内芯84。外包层86是模压在内芯84上。外包层86上还有肋或槽90,可以减小在水中的阻力。在一个实施例中,外包层86可以是聚氨基甲酸酯制成。
可以理解,由于容器10不需要外部通信或电源,缆线82是由非导电材料制成。上述缆线82是低弹性和没有蠕变的高强度缆线。与现有技术的刚性缆线不同,缆线82没有转矩,即,在负载下的扭转。此外,与现有技术的刚性和半刚性缆线比较,缆线82的重量轻并容易被操纵。因此,利用缆线82,可以沿接收器线部署容器10,其中各个容器10是以一定的间距沿缆线82被固定。
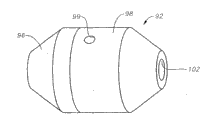
如图9和10所示,本发明的一个特征是把缆线分段并在各个缆线段94之间利用断线连接器92。连接器92包含第一装配件96,第一装配件96嵌入在第二装配件98内。剪切销100插入通过装配件96,98,可以使这两个装配件固定在一起。利用任何标准的方法,可以使这些装配件固定到缆线段94的相邻自由端。在一个实施例中,每个装配件96,98分别有内孔102,104,它是从第一端106延伸到第二端108。在第二端108,每个装配件有穿过每个装配件的相对侧面的孔径97,99。当装配件96放置在第二装配件98内时,可以使孔径97,99对准,剪切销100嵌入通过对准的孔径97,99,并在各自的第二端108使装配件96,98连接。
在它们各自的第一端106,被限定在每个孔102,104内是台肩110。每个装配件插入到缆线98的自由端上,而挡块112固定到该缆线,因此,挡块112紧靠台肩110,并在缆线的一端夹住装配件。在另一个实施例中,从第二端108延伸到第一端106的内孔可以逐渐变细,并利用大于该内孔直径的挡块使装配件固定到缆线的自由端。
在任何的情况下,每个装配件96,98固定到缆线段94的一端,因此,当装配件固定在一起时,多个缆线段形成一根较长的缆线。若较长的缆线中的张力大于剪切销的剪切极限时,则剪切销就断开,从而使较长的缆线分割开。因为剪切销是容易被插入和去掉的,在特定的环境或情况下,可以容易地调整连接缆线的剪切极限。例如,在某些条件下,可能要求剪切极限为5000lbs的剪切销,而在其他的情况下,可能要求剪切极限为8000lbs的剪切销。若连接器是在剪切力下被分割开的,则一旦缆线被取回,通过替换断开的剪切销,可以容易地重新固定这些装配件。
这种断开式系统是理想的,因为当缆线的张力超出它的工作极限时可以快速地啮合。例如,在现有技术的刚性和半刚性缆线中。有时可以产生30000lbs或更大的张力。在这种负载下快速啮合的缆线可能造成损坏和伤害。更理想的是取回一段分开的缆线,而不是遭遇到这种损坏和伤害。
在这种系统的另一个特征中,固定到容器的缆线的断开张力大于固定缆线段的连接器的断开张力。因此,在断开张力的情况中,缆线段是在容器与缆线分开之前就断开。这是理想的,因为定位和取回一段可以啮合的缆线比定位和取回可能已与缆线分开的容器容易得多。
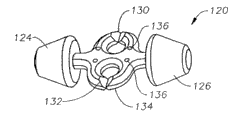
图12和13表示一个夹紧机构120,它允许地震单元被直接夹紧到一段缆线上,而不需要在许多现有技术装置中切割缆线。夹紧机构120包含带轴孔123的套筒122,通过它可以使套筒122装配到缆线上(未画出)。夹紧机构120还包含模压的凸肩124,126,它们设置在套筒122的相对两端。孔径128穿过套筒122的每一端,最好是在垂直于套筒122轴的x和y平面上。在所示的实施例中,套筒122包含可以固定地震单元的环形部分130。在另一个实施例中,套筒122可以是没有环形部分130的管状。套筒122可以整体地制成,或可以是被夹在一起的两个半部分,如图13所示,其中套筒的第一个半部分132和套筒的第二个半部分134是围绕缆线(未画出)被夹紧的,并利用线夹136被固定在一起。
在安装到缆线上时,一根销钉穿过孔径128,用于固定从缆线上滑动的夹紧机构120。凸肩124,126被模压到套筒122的两端,它有助于是固定销被固定。套筒122的两端还可以是喇叭口,它有助于凸肩124,126被固定。
因此,不是切割缆线并在缆线的两个自由端之间固定夹紧机构,本发明的套筒可以夹紧或滑动到一段缆线上,并在不切割缆线的条件下被固定,在沿x和y平面上利用销钉固定该机构可以防止夹紧机构120相对于缆线的转动,并防止沿缆线的轴向滑动。
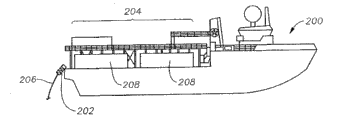
图14-19表示地震系统部署和取回船舶的后甲板。图14大致画出一个有工作甲板202的地震系统部署和取回船舶200,在甲板202上设置地震部署和取回系统204,用于部署和取回缆线206。
地震部署和取回系统204的一个部件是存放架208,用于存放固定到缆线206的OBS单元。应当理解,存放架208是可缩放的,以满足特定容器存放需要和船舶的空间限制。在图14和15,提供四个存放架208以便使特定船舶200的容器存放容量最大化。从图16中可以看出,每个存放架208包括多行210和多列212槽沟214,其中每个槽沟214中设置成放置一个容器216。虽然槽沟214的尺寸可以随存放的具体OBS单元的尺寸而变化,该优选实施例描述的存放架208用于放置上述浅断面的圆盘形容器,它通常表示成容器10。参照图17,每个槽沟214有通信端口218,当容器216放置在槽沟214中时,允许在容器216与主控制站(未画出)之间进行通信。在一个实施例中,通信端口218是经容器10(见图1)中所示的连接器46与容器216链接。如上所述,链路可以是通信端口218与连接器46之间的硬导线,或可以利用一些其他的方法,例如,红外连接器。不管是什么情况,当放置在槽沟214中时,通过端口218可以下载在容器216上记录的信息,可以给单元电池再充电,可以在该单元上进行质量控制检查,可以同步时钟,可以起动记录操作,以及可以再激励该单元。
在另一个实施例的存放架208中,各行和各列槽沟是由单个叠层的旋转式传送带代替,该传送带最好是半圆形或U形。每个旋转式传送带包含滚筒,允许记录单元沿着传送带方式的传送带路径运动,直至该单元到达与通信端口相邻。传送带路径的形状最好是半圆形或U形,允许记录单元被插入到传送带的第一端并从第二端上取下。这种配置允许容器被插入并同时从传送带上取下。作为一个例子,传送带的第一端可以与清洁站相邻,用于清洗从海底取回的容器,而传送带的第二端可以与部署站相邻,允许容器再被固定到部署缆线上。
不管使用哪种存放系统,存放系统可以配置成有标准的8’×20’×8’的集装箱尺寸,因此,存放系统和其中放置的任何地震单元可利用标准的集装箱船只以容易地运输。
在图15,17和18中可以看出,在一个实施例的系统204中,后甲板系统基本上是自动化的。
除了存放架208以外,还画出一个容器部署系统219,它是与存放架208相邻,并延伸到与水面相邻的甲板202的边缘。拾取和放置系统220用于在存放架208与部署系统219之间移动单元216。虽然可以利用各种自动化或半自动化的拾取和放置系统220,但在所示的实施例中,一个或多个单轴往返运输装置221用于在一个或多个抓机臂223之间移动容器216,抓机臂223可以在存放架208,往返运输装置221与部署系统219之间移动容器216。
更具体地说,部署系统219包括:平行于非刚性缆线206的传送带滚动床226,和与传送带226一起运动的容器部署滑动装置228。缆线机222和缆线卷盘/箱224放置成直线移动非刚性缆线206,它是与部署系统219相邻并在船舶的侧面之上。在缆线206被连续地铺设在水中的同时,即,在运行中,容器216固定到非刚性缆线206,其中利用滑动装置228加速容器216达到缆线206的速度。在缆线206的速度与容器216的速度基本相同时,容器216被固定到缆线206,此时,从滑动装置228上释放容器216并继续沿被缆线推进的传送带226运动,容器是该缆线固定的。
传送带226有第一端230和第二端232,其中拾取和放置系统220放置在第一端230的邻近,而一个或多个缆线机222放置在第二端232的邻近,因此,容器216大致是沿传送带226从第一端230运动到第二端232。容器滑动装置228同样是在轨道或框架234上运动,至少部分是沿一段传送带226。在准备部署容器216时,它是利用抓机臂223从存放架208上被拉下,并在往返运输装置221上运动到与传送带226的第一端230相邻的位置。抓机臂223放置容器216到滑动装置228上,它同样放置在与传送带226的第一端230相邻的轨道234上。一旦容器216放置在滑动装置228上,滑动装置228沿传送带226被加速到传送带226的第二端232。当滑动装置228的加速达到缆线206的速度时,容器216被夹住或固定到缆线206上。在一个实施例中,容器216包含带爪的夹子,一旦达到固定速度,夹子可以在缆线206周围闭合。在这个实施例中,容器216可以被直接夹住到缆线206上,或可以被夹住到在缆线206上设置的固定套筒。在任何一种情况下,缆线机222继续拉动缆线206,使缆线206沿传送带226运动,直至它被部署在船只200的边缘上。
一个或多个RFID阅读器240可以沿拾取和放置系统220和部署系统219放置,用于跟踪特定容器216沿甲板202的运动。这种跟踪对于上述的部署和取回系统204是特别理想的,因为容器216具有独立的性质,它不要求各个单元在甲板202上被操作并插入到存放架208上时保持特定的顺序。换句话说,由于本发明的各个容器10是独立的,且每个容器的海底位置和取向信息是被记录在容器内以及在该位置上记录的地震数据,当它们是从海洋上被取回,操作和存放时,这些单元不需要按顺序或接收器线顺序被保持。在这方面,相邻的各个单元不需要沿特定的顺序通过系统204,且不需要在存放架208上相邻地存放,而是可以随机地被插入到存放架208上。
专业人员可以理解,铺设缆线206到水中的速度是不断地被调整的,为的是补偿船舶220在水中的不规则和不可预测的运动。在优选的实施例中,可以连续地调整用于传送与缆线206固定的单元216的滑动装置228的速度,从而允许容器216在运行时被平滑地固定到缆线206上。
虽然以上描述的传送带226,滑动装置228和缆线206是沿直线排列的,但是应当明白,非直线排列也包含在本发明中,只要这种安排可以加速海洋地震单元,为了使该单元可以固定到运动的缆线上。
如上所述,可以利用部署系统219实践本发明的一种方法,即,在运行中固定和释放地震单元216,而不需要在铺设到水中时停止缆线206的运动。该方法可以与部署系统219结合使用,它包括以下的步骤:提供一条以给定速度运动并沿缆线路径的缆线,沿与该缆线路径相邻的路径加速地震单元,直至该地震单元以大致缆线的速度运动,并在二者运动时固定地震单元到缆线上。按照这种方法,地震单元可以固定到缆线上并释放到水中,在部署期间不需要停止和起动缆线和船舶,从而减小沿接收器线铺设一段缆线所需的时间。
在图19所示的本发明另一个实施例中,半自动传送带250是与从缆线盘/缆线箱224中拉出并利用缆线机222铺设的缆线206相交。在这种情况下,存放架208和拾取和放置系统220安排在传送带250的任一侧,其配置类似于图15所示。然而,不是使缆线206与传送带250相邻,而是缆线206在空间上与传送带250隔开。在这个实施例中,传送带250是由第一端252和第二端254限定。传送带250的一部分256是弯曲的,允许容器216运动离开固定容器216的缆线206到达在传送带250第二端254的缆线206。图中还画出第二个传送带258,它是在固定到缆线206之前用于存放容器216。第二个传送带258是从与拾取和放置系统220相邻的位置移动容器216到传送带250的第一端254。
固定站260被限定在缆线206与传送带250的相交点上。在固定站260,海洋地震单元216固定到缆线206,而被固定的单元随后被释放到水中。在一个实施例中,缆线爪262放置在固定站260的下游。在部署容器216时,缆线爪262是在单元216被固定站260固定之前牢固地夹住缆线206,从而去掉缆线爪262上游的线张力,允许单元216被安全地固定到缆线206。这在半自动配置中是特别理想的,其中操作员手动地固定单元216到缆线206上。在任何的情况下,缆线爪释放系统264可以包含在固定站260中,在释放缆线爪262和缆线206中有张力时,可以减小操作员与缆线206相邻或接触的可能性。在该优选的实施例中,释放系统264包含第一按钮266和第二按钮268,必须同时启动这两个按钮,为了使缆线爪262释放。所以,理想的是,单个操作员必须顺序地使用双手以激励释放系统264,因此,释放系统263的功能是安全装置,它可以减小操作员的危险。
虽然没有必要,但是在图19所示的本发明实施例中,在后甲板上装备两个缆线部署系统,其中一个系统是在甲板202的端口侧,而另一个系统是在甲板202的右舷侧,在它们之间放置存放架208,拾取和放置系统220,和传送带250。传送带250弯曲到两个侧面,而每个缆线部署系统包含缆线盘/箱224,缆线机222,固定站260和缆线爪262。这种双重系统具有冗余度,并在一个系统不能工作时,可以确保地震操作不会被延迟。
本发明地震数据记录单元的一个功能是该单元的连续运行。在本发明的这个特征中,在放置该单元到地球表面之前起动数据采集。在一个优选实施例中,海洋地震单元被激励,并在部署到水中之前开始采集数据。在部署之前被激励并开始采集数据的系统在需要检测信号时间之前是稳定的。这可以减小电子操作的变化状态时中断信号检测的可能性。当然,在这种连续数据采集单元的情况下,新颖性是该单元的“连续”性质,且这种功能可应用在陆地或在海洋的环境下。
在类似的实施例中,在沿接收器线放置之前起动数据记录。例如,海洋地震数据记录单元是在部署船舶上时就被激励,并在部署到水中之前开始采集数据。同样地,这可以使单元在需要信号记录时间之前被稳定。为此目的,系统稳定的一个要素是时钟稳定。在该系统的各种要素中,众所周知,时钟的稳定通常需要很长的时间。因此,在本发明的一个实施例中,不管该单元是连续地检测数据或连续地记录数据,时钟总是保持工作的。
在以上两个方法的任何一个方法中,在不中断单元的连续运行条件下,可以在部署和取回的几个循环中利用该单元。因此,在部署之前起动记录操作。在继续进行记录的同时,该装置被部署,取回和再部署。只要存储器是足够的,可以在部署和再部署的几个循环中保持这种连续的记录。
在这一方面,在地震数据单元包含卷绕式存储器的情况下,甚至在地震检测中不使用时可以连续地记录。因此,除了上述的优点以外,起动或开始指令是没有必要的。此外,利用卷绕式存储器的连续记录功能是作为记录之前采集数据的备份,直至以前的数据被写入。另一个优点是,只要时钟是同步的,该装置可以在任何时间都是准备好部署的。
在单元被取回之后记录继续进行的情况下,可以进行例行的操作,例如,数据收集,质量控制测试,和电池充电,而不需要中断记录。这种系统的一个优点是,可以利用该装置记录质量控制测试数据,而不是在进行质量控制测试时记录地震数据。换句话说,数据输入是从地震数据改变成质量控制数据。一旦完成质量控制,该装置可以恢复记录地震数据或其他所需的数据,例如,与位置和定时有关的数据。
在本发明的一个优选实施例中,海洋地震单元包含惯性导航系统,用于测量单元在传输通过水柱和停放在海底时的x,y和z位置信息。一般地说,这种系统测量沿x,y和z方向中每个方向的运动,以及围绕每个x,y和z轴的角运动。换句话说,该系统测量单元从船舶到海底运动时的6个自由度,并利用这种测量信息以确定在海底上的位置。在这个优选实施例中,利用加速度计,可以确定这种x,y和z方向的信息。利用倾斜仪和罗盘或其他的取向装置,例如,陀螺仪,可以确定角的取向,即,倾斜和方向。在本发明的一个实施例中,利用三个加速度计和三个陀螺仪,可以产生用于确定该单元海底位置的惯性导航数据。
在任何的情况下,通过组合加速度计以及倾斜和方向信息作为时间的函数,可以确定该单元在被释放到水柱中时的初始位置和速度,该单元通过水柱的运动路径。更重要的是,可以确定该单元在水柱底的位置,即,该单元在海底的位置。在合适的时间间隔上进行时间抽样以得到所需的精确度。各种测量分量之间的时间抽样可以不同。例如,用于确定方向从罗盘得到的数据抽样,以及用于测量倾斜从倾斜仪得到的数据抽样速度慢于从加速度计得到的数据抽样速度。在此之前,没有一个其他的海洋单元利用一个或多个加速度计按照这种方法确定位置。在这一方面,该方法和系统可以代替其他的技术确定海底位置的需要,例如,通过声位置变换器,等等。
尽管有以上的描述,这种位置确定方法的功能特别适用于上述连续的记录方法。因为单元在释放到水柱的顶部时已准备记录数据,x,y和z位置信息可以被该单元容易地记录,并成为该单元完整数据记录的一部分。
本发明还提供一种与缆线固定的OBS单元300的独特取回方法,如图20所示。具体地说,我们发现,在船舶306尾端304上的取回缆线302是在船舶移动前端308时首先在沿缆线的方向放下缆线302,为的是减小取出缆线时在海底310上的阻力,并防止缆线302的过度张力或“拉力”,这种情况在现有技术取回方法中是很普遍的。具体地说,在本发明的方法中,OBS单元和缆线上的水曳力可以使缆线302减速或翻转在船舶306之后,如在312所示,利用水柱作为震动吸收器并减小过度的张力。
在这个方法中,调整船舶306的速度不如像在现有技术的取回方法中那么重要。此外,当船舶是沿与它相反的方向运动时,因为缆线302是在船舶之后的水中翻转312,它不太可能被船舶的推进器缠绕,这种情况在利用现有技术方法中是可能发生的。当然,专业人员明白,在本发明的方法中,可以在船舶的船首或船尾上取出缆线,只要该船舶是沿缆线的方向运动,且缆线的取出是在船舶的尾端。
在任何的情况下,浮动释放系统314也可以固定到缆线,通常是在被部署缆线的一端或两端,可以至少使部分的缆线上升到水面,利用以上描述的方法取回容易被缆线扣住。这种方法在专业领域中是熟知的,并可以包含一个浮动装置,它是在所需的取回时间从海底附近被释放,或漂浮在水面上的浮动装置,但是在部署时保持与缆线的固定。
本发明的非刚性缆线也包含在图21所示容器的独特部署方法中。具体地说,利用非刚性缆线402至少使两个OBS单元400栓系在一起。缆线402和OBS单元400被部署在水柱404中。因为OBS单元400的负浮力远远大于非刚性缆线的负浮力,这些单元有在缆线之前沉入通过水柱的趋势,因此,连接两个OBS单元的缆线段在两个单元之间被减速,如406所示。缆线下降通过水柱的曳力功能是断裂,从而减慢单元的下降并允许单元放置在海底408上更容易被控制。具体地说,减慢效应可以控制各个单元的取向,例如,与图6和7所示楔形缓冲垫的配合的那些单元。此外,非刚性缆线使单元缓缓地停放在海底上,允许各个单元与海底有一致的耦合。
这是对现有技术方法的改进,因为现有技术方法利用刚性或半刚性缆线部署OBS单元。这种缆线有可以与各个单元一起较快地沉入通过水柱的趋势。换句话说,这种缆线没有与本发明的重量轻,非刚性缆线相同的曳力特性。在利用这种现有技术方法的缆线和OBS单元中,当单元快速传输通过水柱时,各个单元的取向是非常容易地发生不稳定,例如,颤动或翻转。
本发明部署方法的另一个优点是,在部署缆线和一旦停放在海底上时,非刚性缆线可以松弛地形成在两个相邻的单元之间。事实上,我们发现,在一般的部署操作时,如上所述,两个单元之间的非刚性缆线长度一般远远大于这两个单元停放在海底上时的实际间隔。换句话说,一旦停放在海底上,在相邻单元之间的非刚性缆线有很大的松弛度。因此,本发明的非刚性缆线不能把两个单元分隔开。在任何的情况下,船舶操作员可以利用在非刚性缆线中形成的松弛度,校正它在被铺设时的接收器线。具体地说,若铺设船舶漂移或使被铺设的接收器线偏离理想的接收器线,则水面上的船舶可以重新定位,使其余的非刚性缆线和被固定的单元开始返回到理想的接收器线上。缆线的非刚性性质造成的缆线松弛度允许操作员回到接收器线上,并使其余的各个单元大致停留在它们沿预期线的理想位置上。与此对比,若这种单元被固定到刚性或半刚性缆线上,则该缆线没有任何可调整的松弛度,而沿理想接收器线上的其余单元不可能停留在沿接收器线的理想位置上。此外,一旦OBS单元400是在海底的位置上,这些单元之间的缆线402是松弛的,如410所示。这可以使各个单元“去耦合”,并防止多余噪声沿缆线的传输。
在时钟20是晶体时钟的情况下,来自倾斜仪38的信息可用于校正重力对时钟定时的影响。在现有技术中,倾斜仪的信息仅被用于校正地震数据。除了利用晶体时钟校正温度影响以外,没有其他类型的晶体可用于这种时钟的校正。因此,本发明的一个特征是,利用倾斜仪的信息校正时钟定时的不准确性,它起源于作用到晶体时钟上的重力效应。这种时钟校正可以在数据记录时对机载的容器进行,或应用于已从容器中提取的数据。
同样地,来自倾斜仪38的信息可用于对地震数据的数学平衡操作。在现有技术中校正地震数据是为了调整取向,这种校正是基于船载的现有技术OBS系统上安装的机械常平架。然而,典型的机械常平架可以造成数据保真度的恶化,这是由于常平架在它船只上受到的阻力。在本发明的一个特征中,我们已经确定,非常平的数据校正或“数学平衡操作”优于现有技术的常平操作方法。因此,本发明可利用倾斜仪的信息按照数学方法调整容器垂直取向时的地震数据。这种数学平衡操作可以在数据记录时的机载容器上实施,或可应用于已从容器中提取的数据。
此外,来自罗盘36的信息可用于进一步改进数学平衡操作以调整单元的旋转取向。具体地说,罗盘数据可以与数学平衡操作中的倾斜仪数据结合在一起,更完全地校正由于容器取向所影响的地震数据。
虽然此处已详细地描述本发明的某些特征和实施例,容易明白,在以下权利要求书的精神和范围内,本发明包括所有的改进和提高。
Claims (50)
1.一种海底地震数据收集系统,包括:
a.有限定内隔室的侧壁的不透水箱体;
b.设置在所述箱体内的至少一个地震检波器;
c.设置在所述箱体内的时钟;
d.设置在所述箱体内的功率源;和
e.设置在所述箱体内的地震数据记录仪,
f.所述系统有负浮力,其中所述地震检波器被耦合到所述地震数据记录仪,以便允许由所述地震检波器检测的地震信号被记录在所述地震数据记录仪;和
g.其中该箱体包括有第一边缘的第一平板和有第二边缘的第二平板,其中这两个平板是通过所述侧壁沿它们的边缘被连接。
2.按照权利要求1的系统,其中该箱体是圆盘状。
3.按照权利要求1的系统,其中该箱体有第一轴和第二轴,其中该箱体围绕第一轴和第二轴中的每个轴是对称的。
4.按照权利要求1的系统,其中箱体的特征是高度和直径,其中直径大于所述高度。
5.按照权利要求4的系统,其中高度不大于直径的50%。
6.按照权利要求1的系统,还包括:设置在所述箱体上的缓冲垫。
7.按照权利要求6的系统,其中所述缓冲垫是沿着所述侧壁设置的。
8.按照权利要求7的系统,其中所述缓冲垫包含延伸到所述平板的边缘之外的凸台。
9.按照权利要求8的系统,其中所述缓冲垫是由凸台的横截面限定,和所述横截面是楔形横截面。
10.按照权利要求8的系统,其中所述缓冲垫是由凸台的横截面限定,和所述横截面是圆形横截面。
11.按照权利要求6的系统,其中所述缓冲垫是由至少一个铰接式挡板构成。
12.按照权利要求11的系统,其中所述铰接式挡板安装在固定到所述箱体的一对相邻圆形托架之间。
13.按照权利要求1的系统,还包括:
a.设置在所述箱体内的三个地震检波器;
b.罗盘;和
c.倾斜仪。
14.按照权利要求1的系统,还包括:声位置变换器。
15.按照权利要求1的系统,还包括:水听器。
16.按照权利要求1的系统,还包括:设置在所述内隔室内的内肋,用于提供所述平板的支承。
17.按照权利要求1的系统,还包括:固定到所述侧壁的闭锁机构。
18.按照权利要求1的系统,还包括:固定到所述第一平板的闭锁机构。
19.按照权利要求1的系统,还包括:与所述地震检波器,时钟,功率源和地震记录仪中的至少一个进行电通信的外部连接器,所述外部连接器延伸通过所述箱体的侧壁并设置在所述侧壁内,为的是从所述侧壁的外表面插入,并且不透水的抗压力罩设置在所述外部连接器上。
20.按照权利要求19的系统,还包括:设置在所述外部连接器上的不透水,抗压力罩。
21.按照权利要求1的系统,还包括:设置在箱体外表面上的射频识别标记。
22.按照权利要求1的系统,其中所述功率源可以给水下部署的地震数据收集系统提供全部的功率。
23.按照权利要求1的系统,其中所述功率源是锂离子电池。
24.按照权利要求1的系统,还包括:内部控制机构,用于控制该系统在水下部署时的所有功能。
25.按照权利要求1的系统,还包括:
a.设置在所述箱体中的至少四个地震检波器。
26.按照权利要求25的地震数据收集系统,其中所述至少四个地震检波器安排成四面体配置。
27.按照权利要求1的系统,还包括:
a.设置在所述箱体中的至少五个地震检波器。
28.按照权利要求1的系统,其中所述时钟是晶体时钟。
29.按照权利要求1的系统,其中所述时钟是铷钟。
30.按照权利要求1的系统,其中每个平板的特征是宽度,而侧壁的特征是高度,其中平板的宽度大于侧壁的高度。
31.一种海底地震数据收集系统,包括:
a.由两个平行圆板形成的圆盘形的不透水箱体,这两个圆板的连接是通过浅壁沿着它们的边缘限定一个内隔室;
b.设置在所述箱体内的至少一个地震检波器;
c.设置在所述箱体内的时钟;
d.设置在所述箱体内的地震数据记录仪;和
e.设置在所述箱体内的功率源,
f.所述系统有负浮力。
32.按照权利要求31的系统,其中所述地震数据记录仪包含卷绕式存储器媒体。
33.按照权利要求31的系统,其中每个圆板的特征是宽度,而浅壁的特征是高度,其中圆板的宽度大于浅壁的高度。
34.按照权利要求31的系统,其中箱体是对称的。
35.按照权利要求31的系统,其中箱体有第一轴和第二轴,其中箱体围绕第一轴和第二轴中的每个轴是对称的。
36.按照权利要求31的系统,其中箱体的特征是高度和直径,其中直径大于所述高度。
37.按照权利要求36的系统,其中高度不大于直径的50%。
38.按照权利要求31的系统,其中至少一个圆板是由内表面和外表面限定,其中外表面上有凹槽,用于增强该系统与海底的耦合。
39.按照权利要求31的系统,其中至少一个圆板是由内表面和外表面限定,其中外表面上有凸台,用于增强该系统与海底的耦合。
40.按照权利要求31的系统,其中至少一个圆板是由内表面和外表面限定,其中外表面上有脊纹,用于增强该系统与海底的耦合。
41.按照权利要求40的系统,其中所述脊纹在所述圆板的外表面上形成回纹状图形。
42.按照权利要求31的系统,还包括:设置在所述内隔室内的内肋,用于提供所述圆板的支承。
43.按照权利要求32的系统,还包括:外部连接器,与所述地震检波器,时钟,功率源和地震记录仪中的至少一个进行电通信,所述外部连接器延伸通过所述箱体的浅壁,并设置在所述浅壁内,为的是从所述浅壁的外表面插入,并且不透水的抗压力罩设置在所述外部连接器上。
44.按照权利要求43的系统,还包括:设置在所述外部连接器上的不透水,抗压力的罩。
45.按照权利要求31的系统,还包括:设置在箱体外表面上的射频识别标记。
46.按照权利要求31的系统,其中所述功率源给地震数据收集系统提供全部的功率。
47.按照权利要求31的系统,还包括:内部控制机构,用于控制该系统在水下部署时的所有功能。
48.按照权利要求31的系统,其中所述时钟是晶体时钟。
49.按照权利要求31的系统,其中所述时钟是铷钟。
50.一种海底地震数据收集系统,包括:
a.有限定内隔室的侧壁的不透水箱体;
b.设置在所述箱体内的至少一个地震检波器;
c.设置在所述箱体内的时钟;
d.设置在所述箱体内的功率源;和
e.设置在所述箱体内的地震数据记录仪,
f.所述系统有负浮力,其中所述地震检波器被耦合到所述地震数据记录仪,以便允许由所述地震检波器检测的地震信号被记录在所述地震数据记录仪;和
g.其中该箱体包括有第一边缘的第一平板和有第二边缘的第二平板,其中这两个平板是通过所述侧壁沿着它们的边缘被连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210243445.3A CN102788992B (zh) | 2004-09-21 | 2004-09-21 | 用于地震数据采集的方法和设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/US2004/030998 WO2006041438A1 (en) | 2004-09-21 | 2004-09-21 | Method and apparatus for seismic data acquisition |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210243445.3A Division CN102788992B (zh) | 2004-09-21 | 2004-09-21 | 用于地震数据采集的方法和设备 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101057160A CN101057160A (zh) | 2007-10-17 |
| CN101057160B true CN101057160B (zh) | 2012-09-05 |
Family
ID=36148595
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2004800443930A Expired - Lifetime CN101057160B (zh) | 2004-09-21 | 2004-09-21 | 用于地震数据采集的方法和设备 |
Country Status (6)
| Country | Link |
|---|---|
| EP (2) | EP3699647A1 (zh) |
| CN (1) | CN101057160B (zh) |
| CA (1) | CA2581193C (zh) |
| MX (1) | MX2007003290A (zh) |
| RU (1) | RU2416810C2 (zh) |
| WO (1) | WO2006041438A1 (zh) |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8325561B2 (en) * | 2006-06-10 | 2012-12-04 | Inova Ltd. | Digital elevation model for use with seismic data acquisition systems |
| CN101535837B (zh) * | 2006-09-29 | 2012-06-13 | 英洛瓦有限公司 | 用于无线地震数据采集的系统和装置 |
| CN101836133B (zh) * | 2007-09-18 | 2013-06-26 | 离子地球物理公司 | 海底缆线和传感器单元 |
| US8605543B2 (en) * | 2007-09-21 | 2013-12-10 | Fairfield Industries Incorporated | Method and apparatus for correcting the timing function in a nodal seismic data acquisition unit |
| CA2996790C (en) | 2007-09-21 | 2022-03-08 | Fairfield Industries, Inc. | Method and apparatus for correcting the timing function in a nodal seismic data acquisition unit |
| US9128202B2 (en) | 2008-04-22 | 2015-09-08 | Srd Innovations Inc. | Wireless data acquisition network and operating methods |
| DE102010018547A1 (de) * | 2010-04-28 | 2011-11-03 | Airbus Operations Gmbh | Vorrichtung und Verfahren zum Messen eines Luftdrucks sowie System zum Erfassen von Luftdaten |
| NO331416B1 (no) * | 2010-05-07 | 2011-12-27 | Magseis As | Seismisk havbunnskabel-registreringsapparat, samt fremgangsmate for utlegging og opphenting av det seismiske havbunnskabel-registreringsapparat |
| US9720116B2 (en) | 2012-11-02 | 2017-08-01 | Fairfield Industries Incorporated | Land based unit for seismic data acquisition |
| EP2932307A4 (en) * | 2012-12-13 | 2016-08-17 | Fairfield Ind Inc | RELEASE AND RETENTION DEVICE, METHOD AND APPLICATIONS |
| US9360575B2 (en) | 2013-01-11 | 2016-06-07 | Fairfield Industries Incorporated | Simultaneous shooting nodal acquisition seismic survey methods |
| CN103592686B (zh) * | 2013-11-19 | 2016-08-17 | 中国海洋石油总公司 | 一种海上地震数据采集测试系统 |
| EP3143436B1 (en) | 2014-05-15 | 2019-03-06 | Seabed Geosolutions B.V. | Autonomous seismic node handling and storage system |
| US9494700B2 (en) | 2014-06-13 | 2016-11-15 | Seabed Geosolutions B.V. | Node locks for marine deployment of autonomous seismic nodes |
| WO2016020540A1 (en) | 2014-08-07 | 2016-02-11 | Seabed Geosolutions B.V. | Autonomous seismic nodes for the seabed |
| US9429671B2 (en) | 2014-08-07 | 2016-08-30 | Seabed Geosolutions B.V. | Overboard system for deployment and retrieval of autonomous seismic nodes |
| WO2016020500A1 (en) | 2014-08-07 | 2016-02-11 | Seabed Geosolutions B.V. | System for automatically attaching and detaching seismic nodes directly to a deployment cable |
| US10514473B2 (en) | 2015-05-29 | 2019-12-24 | Seabed Geosolutions B.V. | Seabed coupling plate for an ocean bottom seismic node |
| RU2018119485A (ru) | 2015-10-30 | 2019-12-02 | Ион Джиофизикал Корпорейшн | Океанические донные сейсмические системы |
| CN108463743B (zh) * | 2015-11-17 | 2020-03-13 | 费尔菲尔德工业公司 | 后甲板自动化装置 |
| NO20160971A1 (en) * | 2016-06-06 | 2017-10-16 | Inapril As | Method for time drift measurement, seismic node and seismic node handling system |
| US10488537B2 (en) * | 2016-06-30 | 2019-11-26 | Magseis Ff Llc | Seismic surveys with optical communication links |
| US10641914B2 (en) | 2016-10-17 | 2020-05-05 | Seabed Geosolutions B.V. | Removable fastening mechanism for marine deployment of autonomous seismic nodes |
| WO2018217872A1 (en) | 2017-05-23 | 2018-11-29 | Ion Geophysical Corporation | Seismic node deployment system |
| US10571588B2 (en) | 2017-06-09 | 2020-02-25 | Magseis Ff Llc | Seismic data acquisition unit |
| CN107390263B (zh) * | 2017-06-27 | 2023-08-08 | 中国地震局工程力学研究所 | 井下传感器正交保持自调平装置 |
| EP3776009B1 (en) * | 2018-04-02 | 2023-11-22 | Magseis FF LLC | Systems and methods to locate seismic data acquisition units |
| EP4276008A3 (en) | 2018-05-23 | 2024-05-29 | Blue Ocean Seismic Services Limited | An autonomous data acquisition system |
| EP3802309B1 (en) | 2018-06-08 | 2024-04-10 | DigiCourse LLC | Sensor node attachment mechanism and cable retrieval system |
| US11524756B2 (en) * | 2018-08-27 | 2022-12-13 | Pgs Geophysical As | Ocean bottom node deployment |
| WO2020056216A1 (en) | 2018-09-13 | 2020-03-19 | Ion Geophysical Corporation | Multi-axis, single mass accelerometer |
| US11609350B2 (en) * | 2018-10-12 | 2023-03-21 | Magseis Ff Llc | Modular seismic unit storage system with gantry robot and charging magazine |
| US11086039B2 (en) * | 2019-01-04 | 2021-08-10 | Fairfield Industries, Inc. | Connector for lanyard attachment of seismic node to cable |
| CN112346127A (zh) * | 2019-08-09 | 2021-02-09 | 中国石油天然气集团有限公司 | 海洋勘探节点的收放系统、投放方法及回收方法 |
| CN112987082B (zh) * | 2021-05-11 | 2021-10-15 | 中国科学院武汉岩土力学研究所 | 一种隧道施工不良地质三维地震波超前探测方法 |
| NO347711B1 (en) * | 2022-04-01 | 2024-02-26 | Reflection Marine Norge As | A Seismic Node Comprising a Separate Waterproof Sealing Skin and A Method for Producing such a Seismic Node |
| WO2024165848A1 (en) * | 2023-02-10 | 2024-08-15 | Pxgeo Uk Limited | Autonomous seismic node for the seabed |
| NO20240045A1 (en) * | 2024-01-17 | 2023-10-02 | Reflection Marine Norge As | A Seismic Device and A Method for Producing a Seismic Device |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4138658A (en) * | 1976-06-04 | 1979-02-06 | Etablissement Public dit "Centre National pour l'Exploitation des Oceans" | Recording ocean bottom device, such as a seismograph |
| US4462094A (en) * | 1980-06-19 | 1984-07-24 | Mobil Oil Corporation | Method and apparatus for determining angle of inclination of seismometer and leveling seismic motion detectors |
| US4666338A (en) * | 1984-01-04 | 1987-05-19 | Mobil Oil Corporation | Ocean bottom seismometer release mechanism |
| US4692906A (en) * | 1984-01-04 | 1987-09-08 | Mobil Oil Corporation | Ocean bottom seisometer |
| US5189642A (en) * | 1991-09-10 | 1993-02-23 | Chevron Research And Technology Company | Seafloor seismic recorder |
| US5253223A (en) * | 1989-10-26 | 1993-10-12 | Den Norske Stats Oljeselskap A.S. | Seismic device |
| US6024344A (en) * | 1999-02-17 | 2000-02-15 | Western Atlas International, Inc. | Method for recording seismic data in deep water |
| CN1424592A (zh) * | 2001-12-10 | 2003-06-18 | 法国石油研究所 | 应用海底采集站的地震数据采集系统 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9812006D0 (en) * | 1998-06-05 | 1998-07-29 | Concept Systems Limited | Sensor apparatus |
| CN1120377C (zh) * | 2000-04-26 | 2003-09-03 | 西安石油勘探仪器总厂 | 海底拖曳四分量地震数据采集一体化单元 |
| US6657921B1 (en) * | 2000-05-31 | 2003-12-02 | Westerngeco Llc | Marine seismic sensor deployment system including reconfigurable sensor housings |
| AU2001268292A1 (en) * | 2000-06-12 | 2001-12-24 | Clark Equipment Company | Latch bar construction for a quick change bracket |
| US6951138B1 (en) * | 2000-11-01 | 2005-10-04 | Westerngeco L.L.C. | Method and apparatus for an ocean bottom seismic acquisition technique |
| US6934219B2 (en) * | 2002-04-24 | 2005-08-23 | Ascend Geo, Llc | Methods and systems for acquiring seismic data |
| FR2843805B1 (fr) * | 2002-08-22 | 2004-12-17 | Inst Francais Du Petrole | Methode et dispositif d'acquisition pour l'exploration sismique d'une formation geologique par des recepteurs permanents implantes au fond de la mer |
| NO318314B1 (no) * | 2002-12-09 | 2005-02-28 | Seabed Geophysical As | Sensoranordning for seismiske bolger |
| US7561493B2 (en) * | 2003-05-30 | 2009-07-14 | Fairfield Industries, Inc. | Method and apparatus for land based seismic data acquisition |
-
2004
- 2004-09-21 WO PCT/US2004/030998 patent/WO2006041438A1/en active Application Filing
- 2004-09-21 EP EP20167819.0A patent/EP3699647A1/en not_active Withdrawn
- 2004-09-21 EP EP04809786.9A patent/EP1805533B1/en not_active Expired - Lifetime
- 2004-09-21 RU RU2007115090/28A patent/RU2416810C2/ru not_active Application Discontinuation
- 2004-09-21 CN CN2004800443930A patent/CN101057160B/zh not_active Expired - Lifetime
- 2004-09-21 CA CA2581193A patent/CA2581193C/en not_active Expired - Lifetime
- 2004-09-21 MX MX2007003290A patent/MX2007003290A/es active IP Right Grant
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4138658A (en) * | 1976-06-04 | 1979-02-06 | Etablissement Public dit "Centre National pour l'Exploitation des Oceans" | Recording ocean bottom device, such as a seismograph |
| US4462094A (en) * | 1980-06-19 | 1984-07-24 | Mobil Oil Corporation | Method and apparatus for determining angle of inclination of seismometer and leveling seismic motion detectors |
| US4666338A (en) * | 1984-01-04 | 1987-05-19 | Mobil Oil Corporation | Ocean bottom seismometer release mechanism |
| US4692906A (en) * | 1984-01-04 | 1987-09-08 | Mobil Oil Corporation | Ocean bottom seisometer |
| US5253223A (en) * | 1989-10-26 | 1993-10-12 | Den Norske Stats Oljeselskap A.S. | Seismic device |
| US5189642A (en) * | 1991-09-10 | 1993-02-23 | Chevron Research And Technology Company | Seafloor seismic recorder |
| US6024344A (en) * | 1999-02-17 | 2000-02-15 | Western Atlas International, Inc. | Method for recording seismic data in deep water |
| CN1424592A (zh) * | 2001-12-10 | 2003-06-18 | 法国石油研究所 | 应用海底采集站的地震数据采集系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2581193C (en) | 2016-04-12 |
| EP1805533B1 (en) | 2020-05-06 |
| WO2006041438A1 (en) | 2006-04-20 |
| EP1805533A4 (en) | 2010-05-26 |
| CN101057160A (zh) | 2007-10-17 |
| RU2007115090A (ru) | 2008-10-27 |
| CA2581193A1 (en) | 2006-04-20 |
| EP1805533A1 (en) | 2007-07-11 |
| RU2416810C2 (ru) | 2011-04-20 |
| MX2007003290A (es) | 2008-10-30 |
| EP3699647A1 (en) | 2020-08-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101057160B (zh) | 用于地震数据采集的方法和设备 | |
| US11237285B2 (en) | Ocean bottom seismometer package | |
| CN108594307A (zh) | 同时爆破节点采集地震勘测方法 | |
| CN102788992B (zh) | 用于地震数据采集的方法和设备 | |
| CA2887400C (en) | Method and apparatus for seismic data acquisition |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20230228 Address after: Texas, USA Patentee after: Magsaiz FF Co.,Ltd. Address before: Texas, USA Patentee before: FAIRFIELD INDUSTRIES, Inc. |
|
| CX01 | Expiry of patent term | ||
| CX01 | Expiry of patent term |
Granted publication date: 20120905 |