{kind=link}
{kind=link}
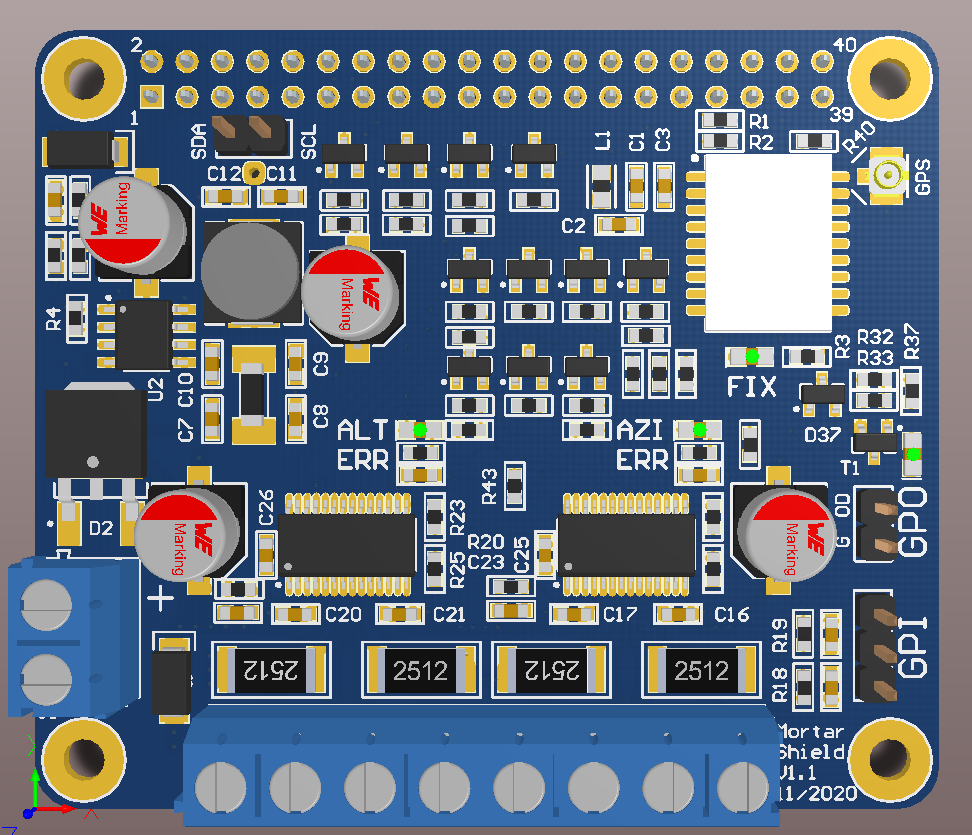
MortarShield is basically a dual stepper motor driver with integrated power supply and GPS module.
Designed as a part of bigger hobby project https://github.com/kwahoo2/Mortar
The goal was to "electrify" a dobsonian-mounted telescope and connect it with Stellarium.
Shield is meant to be powered from 12V supply, but should work within 8-15V range.
Onboard DC/DC converter provides power for Rpi and accesories (3A total)
Board uses 2x DRV8814 as motor drivers.
Motor maximum current is limited to 2A for each winding and can be additionally lowered by software.
I suggest to start with lower currents, as drivers may become hot. 1A is usually enough.
Stellarium gets position and time from embedded GPS module. Any NMEA-compatible GPS module will work as well, just connect UART to R1/R2.
Since RPi GPIOs are prone to damage, board is equipped with protection components (220R/double schottky)
You don't have to populate them if you're not planning to do experiments with board.
"Deadbug" prototype consisted of brick 5v adapter powering Rpi and a lab supply to feed motors. It turned out that those old L298 drivers aren't top notch ;)
I went with some FET-based bridges. Equipped with PWM current limit, thermal protection and small size, 8814 appeared as decent chip to play with.
Just open drawer, pull out some old GPS module, add GPIOs to handle buttons/photo shutter, try to fit whole stuff into Rpi's shield space. Sounds like fun!

Onboard 5V DC/DC working properly and stable under heavy load, GPS sensivity (with quater-pole-poor-man antenna) was surprisingly good.
Motor drivers turned out to be way more efficent than L298.
-Current sense resistors - changed to 2512
-DRV external reset and fault handling
-DRV AENBL/BENBL are separated now - microstepping
-DRV control inputs pulldowns to avoid weird behave during RPI startup
Uploaded zip contains gerber and drill data - all you need to make your own board from any PCB manufacturer. I recommend 1.55mm thickness, green soldermask and HASL finish, as those are usually the cheapest options.