This is the code for the journal paper Multi-Event-Camera Depth Estimation and Outlier Rejection by Refocused Events Fusion, by Suman Ghosh and Guillermo Gallego, published at Advanced Intelligent Systems.
The PDF of the paper is available. If you use this work in your research, please cite it as follows:
@article{Ghosh22aisy,
author = {Ghosh, Suman and Gallego, Guillermo},
title = {Multi-Event-Camera Depth Estimation and Outlier Rejection by Refocused Events Fusion},
journal = {Advanced Intelligent Systems},
year = {2022},
doi = {10.1002/aisy.202200221}
}
- Events from multiple cameras
- Pose of camera rig
- Camera calibration (instrinsic, extrinsic, hand-eye) parameters
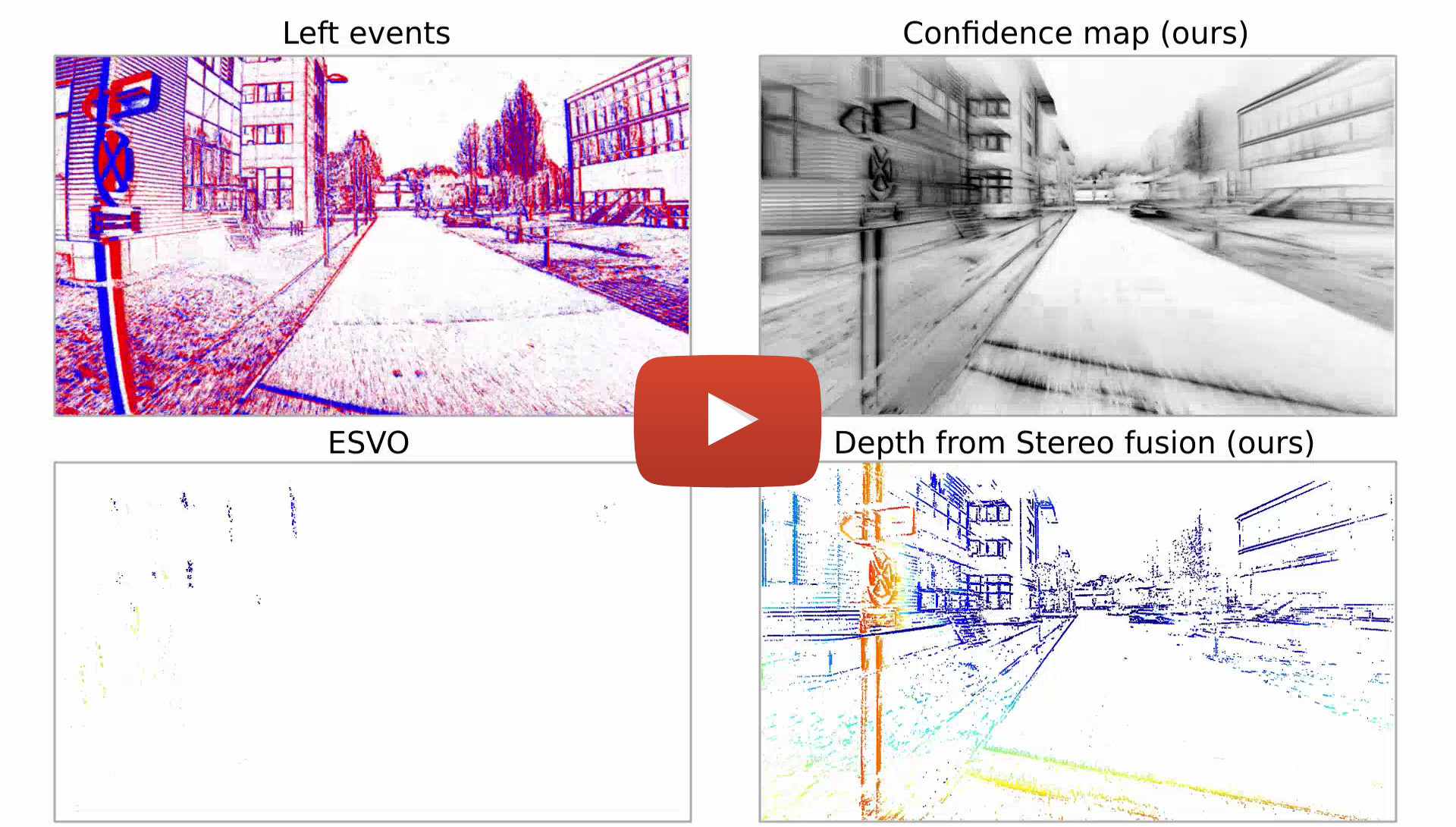
- Depth map
- Confidence map
- Point cloud
- Intermediate ray density maps / Disparity Space Images (DSI)
- Installation instructions
- Running the code with various configurations
- Datasets used
- Running Examples
- Evaluation scripts
The license is available here.